„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Jacek Przepiórka
Charakteryzowanie
części,
mechanizmów,
maszyn
i urządzeń obuwniczych
744[02].Z2.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Bogusław Woźniak
mgr inż. Leszek Świdziński
Opracowanie redakcyjne:
dr inż. Jacek Przepiórka
Konsultacja:
dr inż. Janusz Figurski
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 744[02].Z2.01
„Charakteryzowanie części, mechanizmów, maszyn i urządzeń obuwniczych” zawartego
w modułowym programie nauczania dla zawodu Obuwnik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
Wprowadzenie
3
2.
Wymagania wstępne
4
3.
Cele kształcenia
5
4.
Materiał nauczania
6
4.1. Podstawy mechaniki i wytrzymałości materiałów
6
4.1.1.
Materiał nauczania
6
4.1.2. Pytania sprawdzające
12
4.1.3. Ćwiczenia
13
4.1.4. Sprawdzian postępów
14
4.2. Części maszyn i mechanizmy stosowane w maszynach obuwniczych
15
4.2.1. Materiał nauczania
15
4.2.2. Pytania sprawdzające
31
4.2.3. Ćwiczenia
31
4.2.4. Sprawdzian postępów
32
4.3. Napędy stosowane w maszynach obuwniczych
33
4.3.1. Materiał nauczania
33
4.3.2. Pytania sprawdzające
39
4.3.3. Ćwiczenia
39
4.3.4. Sprawdzian postępów
40
5.
Sprawdzian osiągnięć
41
6. Literatura
46
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy o charakteryzowanie części,
mechanizmów, maszyn i urządzeń obuwniczych.
W poradniku zamieszczono:
–
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane, abyś
bez problemów mógł korzystać z poradnika,
–
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
–
materiał nauczania – wiadomości teoretyczne niezbędne do opanowania treści jednostki
modułowej,
–
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
–
ć
wiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
–
sprawdzian postępów,
–
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi opanowanie
materiału całej jednostki modułowej,
–
literaturę uzupełniającą.
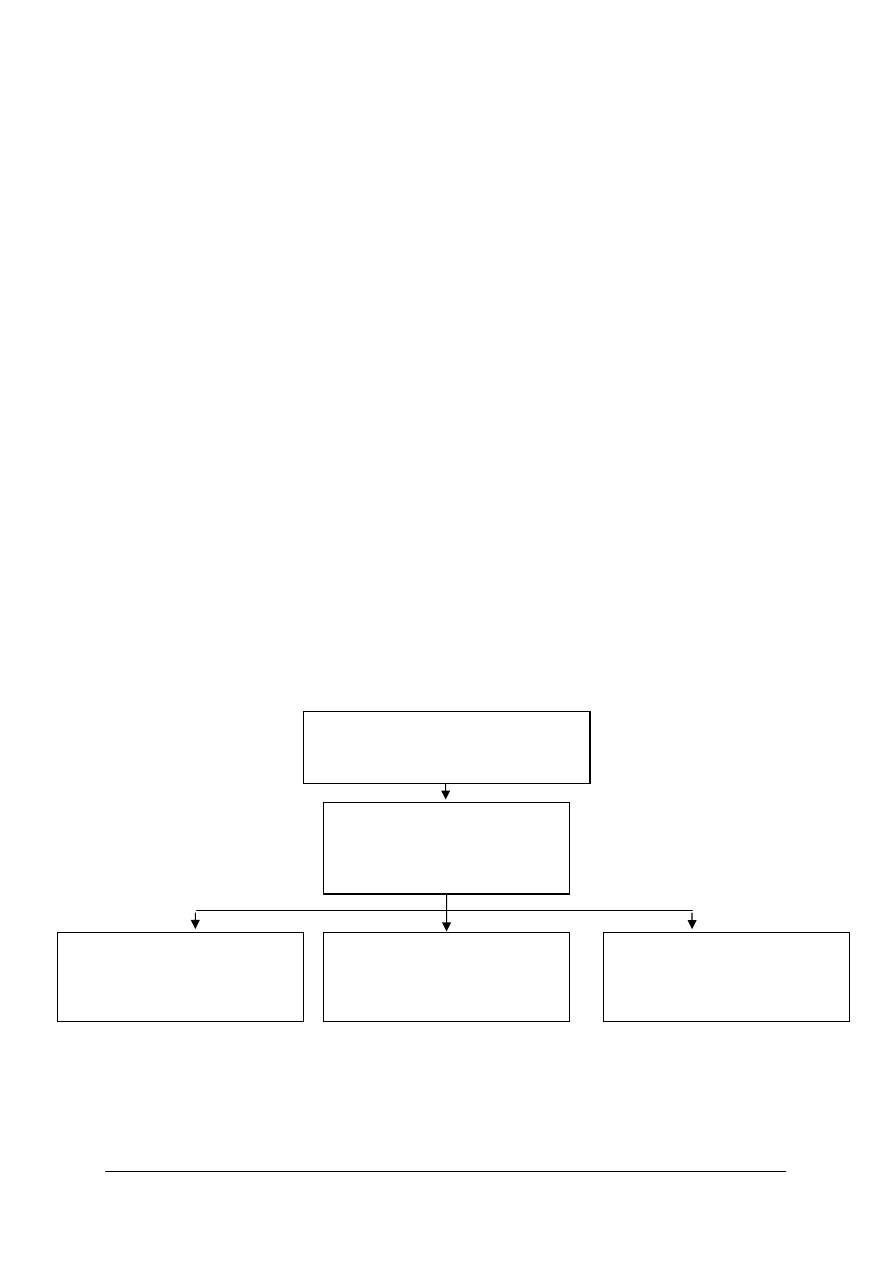
Miejsce jednostki modułowej w strukturze modułu 744[02].Z2 „Maszyny i urządzenia
obuwnicze” jest wyeksponowane na schemacie zamieszczonym poniżej.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp
i instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Wiadomości
dotyczące przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz ochrony
ś
rodowiska znajdziesz w jednostce modułowej 744[02].O1.01 „Przestrzeganie przepisów
bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz ochrony środowiska”.
Schemat układu jednostek modułowych
744[02].Z2
Maszyny i urz
ą
dzenia obuwnicze
744[02].Z2.01
Charakteryzowanie części,
mechanizmów, maszyn i urządzeń
obuwniczych
744[02].Z2.02
Użytkowanie maszyn, urządzeń
i narzędzi do rozkroju materiałów oraz
opracowania elementów spodu obuwia
744[02].Z2.03
Użytkowanie maszyn, urządzeń
i narzędzi do wytwarzania
cholewek
744[02].Z2.04
Zastosowanie maszyn, urządzeń
i narzędzi do montażu
i wykończania obuwia

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
korzystać z różnych źródeł informacji,
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony środowiska i ochrony
przeciwpożarowej,
−
korzystać z różnych źródeł informacji,
−
organizować stanowisko pracy zgodnie z wymogami ergonomii,
−
posługiwać się dokumentacją konstrukcyjną i technologiczną,
−
stosować zasady rysunku technicznego,
−
stosować i zamieniać jednostki układu SI,
−
wykonywać proste obliczenia matematyczne,
−
użytkować komputer,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
scharakteryzować rodzaje napędów maszyn i urządzeń,
−
wyjaśnić pojęcia: praca, moc, energia i sprawność maszyn,
−
scharakteryzować rodzaje tarcia ślizgowego i tocznego,
−
określić właściwości użytkowe części maszyn,
−
rozróżnić rodzaje połączeń części maszyn,
−
określić zasady współdziałania części i mechanizmów,
−
określić sposoby smarowania i konserwacji maszyn i urządzeń,
−
określić zastosowanie oraz wyjaśnić zasady działania napędów mechanicznych,
hydraulicznych, pneumatycznych i elektrycznych,
−
rozpoznać elementy układów napędowych,
−
określić zastosowanie i zasady działania mechanizmów maszyn,
−
określić zakres stosowania automatyzacji w obuwnictwie,
−
rozróżnić podstawowe elementy automatyki,
−
wyjaśnić pojęcia dotyczące teoretycznej i rzeczywistej wydajności maszyn.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
4. MATERIAŁ NAUCZANIA
4.1.
Podstawy mechaniki i wytrzymałości materiałów
4.1.1. Materiał nauczania
Podstawy mechaniki technicznej
Mechanika jest nauką zajmującą się badaniem ruchu ciał materialnych. Mechanika dzieli
się na trzy duże działy, wśród których wyróżniamy:
−
statykę, zajmującą się badaniem warunków równowagi ciał,
−
kinematykę, opisującą ruch z punktu widzenia prędkości i przyśpieszenia,
−
dynamikę, opisującą związki pomiędzy siłami i ruchami ciał.
W mechanice spotykamy się z dwoma rodzajami wielkości: wektorowymi i skalarowymi.
Wielkość skalarowa określa wyłączanie liczbę jednostek przyjętych za pomiarową np.: czas,
długość, powierzchnia, objętość, masa, temperatura itd.
Wielkość wektora (wektor) wymaga określenia: punktu przyłożenia, kierunku działania
wyznaczonego linią prostą, zwrotu oraz liczby jednostek przyjętych za pomiarowe - czyli
modułu danego wektora.
Siła – mechaniczne wzajemne oddziaływanie ciał, które może być bezpośrednie (gdy
ciała się stykają) lub pośrednie (oddziaływanie na odległość). Każdą siłę definiuje: wartość,
kierunek, zwrot oraz punkt zaczepienia, dlatego siła jest wektorem.
Zarówno siły jak i wektory można rozkładać na składowe i jest to zagadnienie odwrotne
do składania sił (lub wektorów).
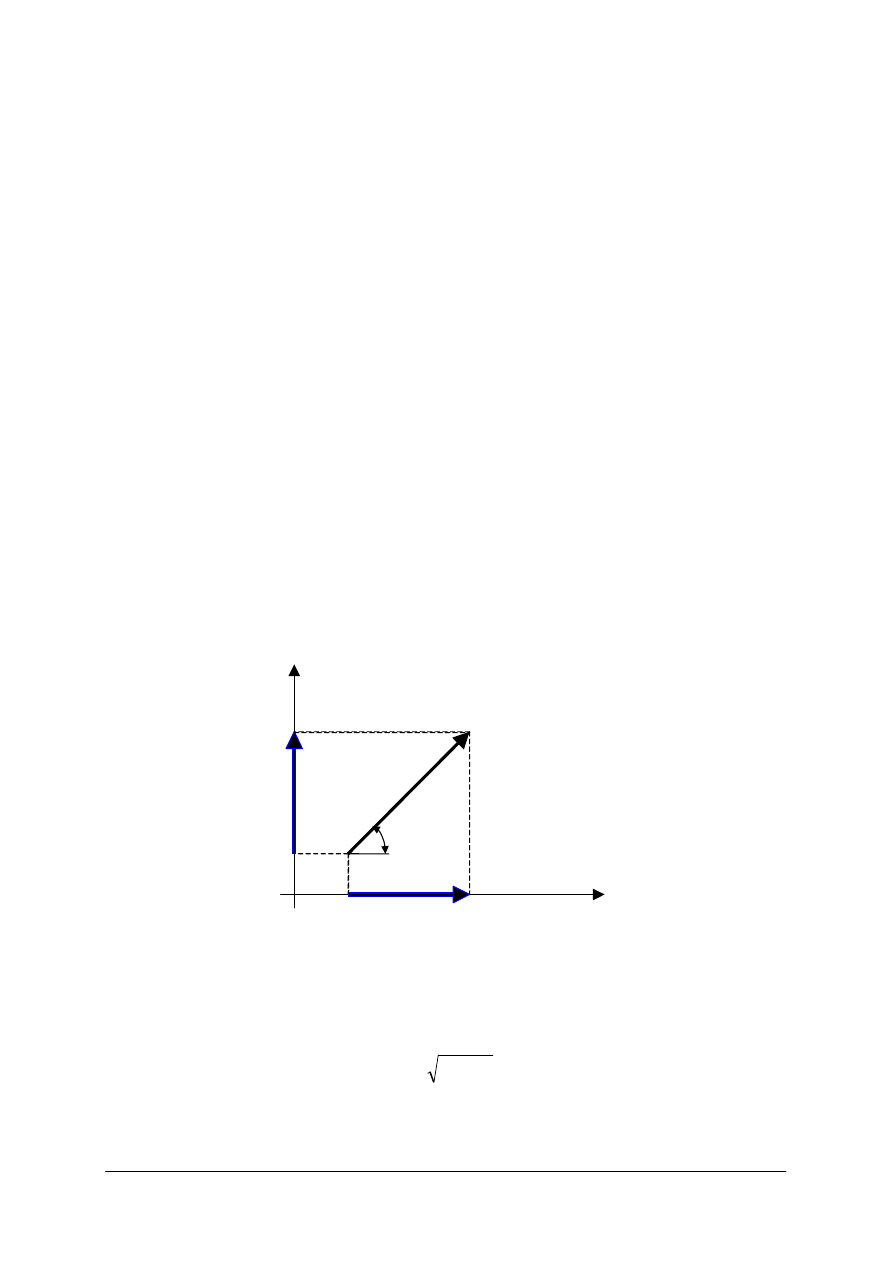
Rzutem siły na dowolną oś nazywamy wielkość odcinka łączącego rzut początku i końca
danej siły na tę oś. Graficzną interpretację rzutowania siły na oś przedstawiono na rysunku 1.
x
y
→
F
x
F
→
α
y
F
→
Rys. 1. Graficzna ilustracja rzutu siły w układzie współrzędnych [opracowanie własne]
Korzystając z funkcji trygonometrycznych i twierdzenia Pitagorasa łatwo można obliczyć, że:
F
x
= Fcos
α
F
y
= Fsin
α
oraz
2
y
2
x
F
F
F
+
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
Płaski układ sił jest w stanie równowagi, gdy nie działają na niego żadne siły lub suma sił
zewnętrznych działających na układ jest równa zero. Warunki te zapisujemy:
0
F
ix
=
∑
∑
=
0
F
iy
Warunki równowagi płaskiego układu sił zbieżnych stosowane są do wyznaczania sił
oraz reakcji układów, w których występują tylko dwie niewiadome.
Momentem siły F
r
względem punktu O nazywamy iloczyn wartości tej siły przez ramię
jej działania, czyli odległości obranego punktu od linii działania tej siły.
M
o
= F · r
Moment siły, w zależności od przyjętego założenia może posiadać wartość dodatnią lub
ujemną, przy czym należy pamiętać, aby przyjęte zasady stosować konsekwentnie w całym
analizowanym układzie. W mechanice przyjęto założenia, że moment uważamy za dodatni,
jeśli siła dąży do obrócenia swojego ramienia r dookoła bieguna O w kierunku zgodnym
z ruchem wskazówek zegara. Jeśli dąży do obrócenia swojego ramienia r w kierunku
niezgodnym z ruchem wskazówek zegara, moment uważamy za ujemny. Przykład momentu
dodatniego i ujemnego pokazano na rysunku 2.
Rys. 2. Określanie znaku momentu siły [1, s. 13]
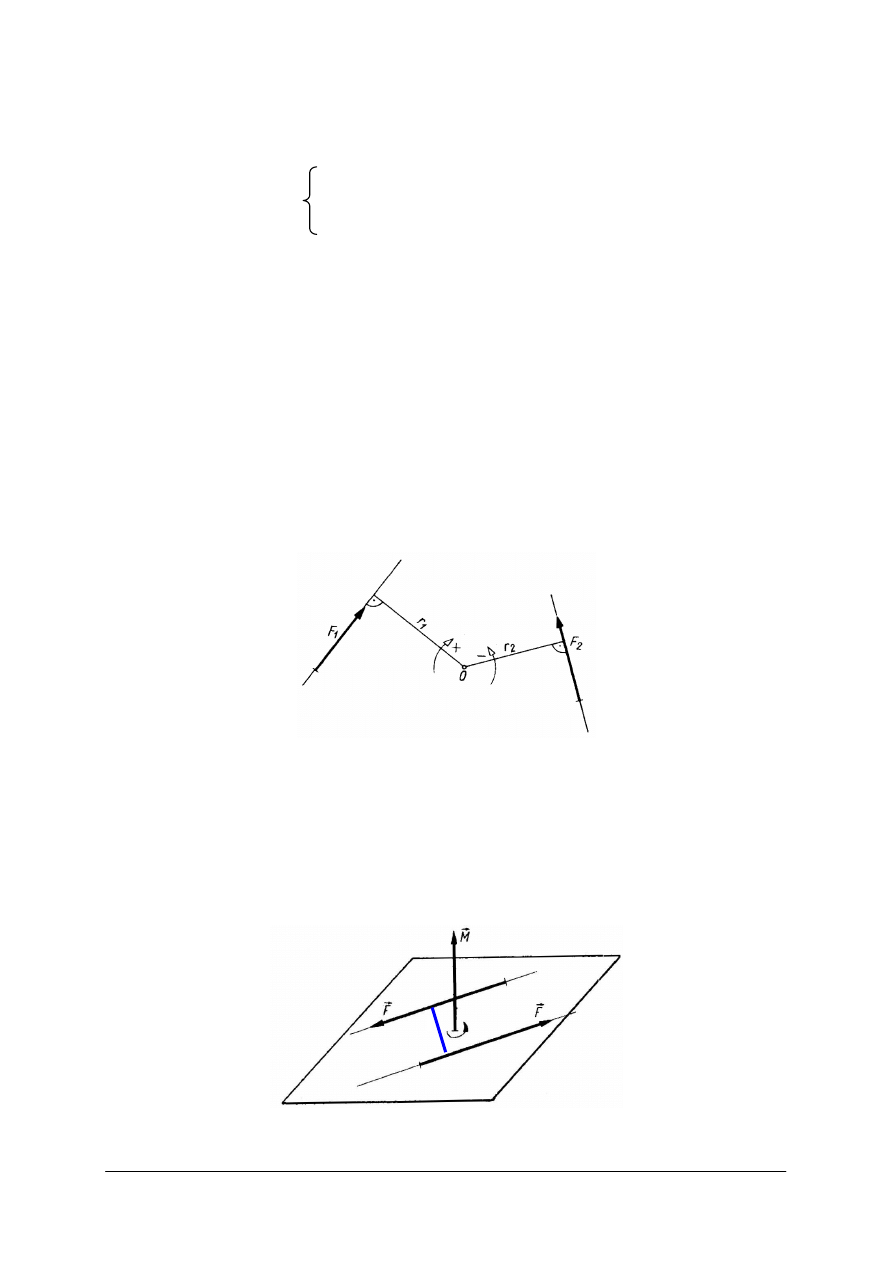
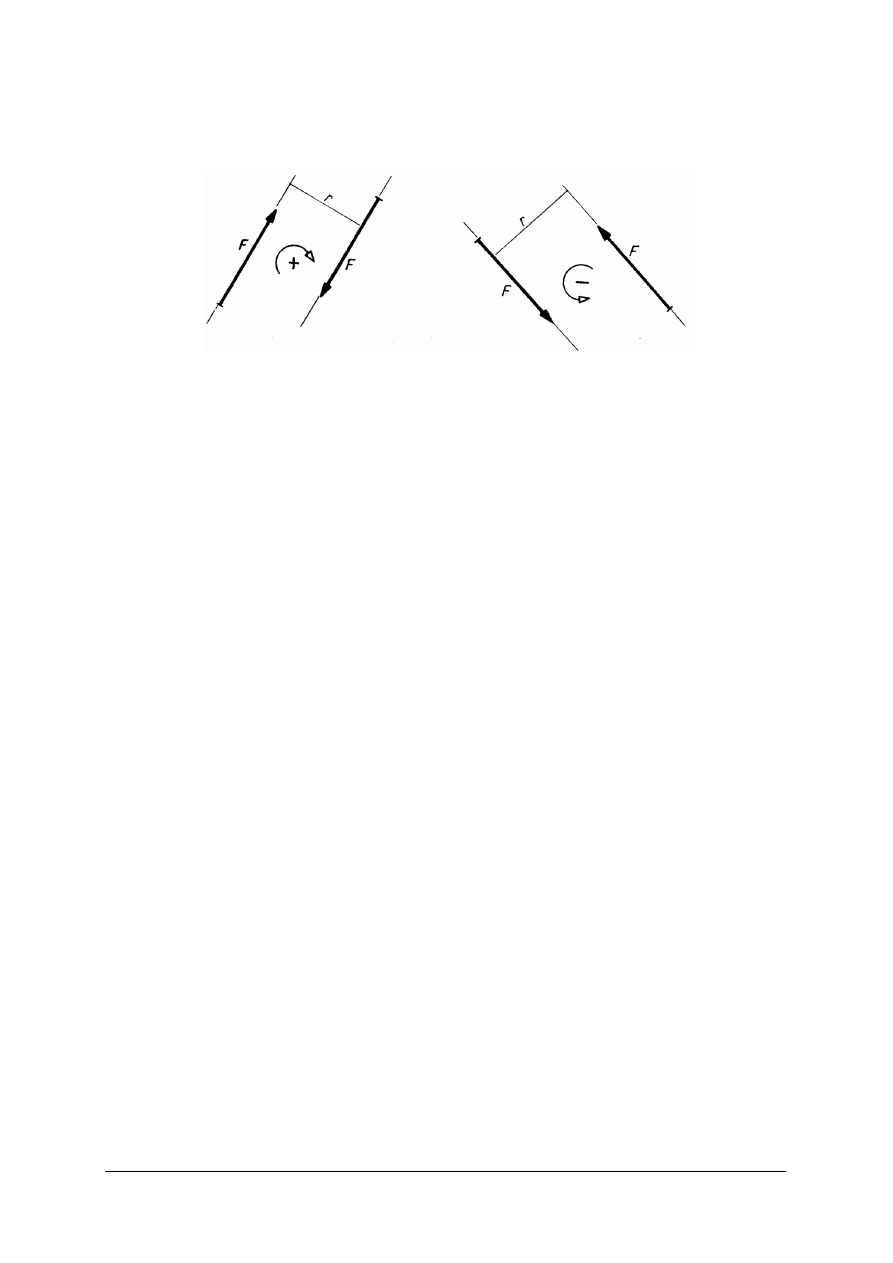
Parą sił nazywamy układ dwóch sił o równych wartościach i jednakowych kierunkach,
lecz o przeciwnych zwrotach. Odległości pomiędzy liniami działania obu sił oznaczamy przez
„r” i nazywamy ramieniem pary. Para sił posiada moment równy iloczynowi wartości jednej
z sił przez ramię pary. Na rysunku 3 przedstawiono parę sił oraz wektor momentu od nich
pochodzącego.
M = F · r
r
Rys. 3. Moment skręcający wytwarzany przez parę sił [8, s. 53]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Para sił posiada moment, który może mieć znak dodatni lub ujemny podobnie jak moment
siły. Zasada określania wartości momentu pary jest identyczna jak w przypadku momentu siły
i jej graficzną ilustrację obrazuje rysunek 4.
Rys. 4. Para sił i moment pary sił [1, s. 14]
W przypadku układu obciążonego siłami o różnych kierunkach działania, warunki
równowagi płaskiemu układu sił zbieżnych mogą okazać się niewystarczające. Układ taki
nazywamy dowolnym układem płaskim sił i aby znajdował się w równowadze muszą być
spełnione trzy analityczne warunki:
−
suma algebraiczna rzutów wszystkich sił na oś x musi równać się zeru,
−
suma algebraiczna rzutów wszystkich sił na oś y musi równać się zeru
−
suma algebraiczna momentów wszystkich sił względem dowolnego bieguna musi równać
się zeru.
Warunki równowagi dowolnego płaskiego układu sił zapisuje się w postaci równań:
=
+
+
+
=
=
+
+
+
=
=
+
+
+
=
∑
∑
∑
0
M
...
M
M
M
M
0
F
...
F
F
F
F
0
F
...
F
F
F
F
n
3
2
1
i
ny
y
3
y
2
y
1
iy
nx
x
3
x
2
x
1
ix
Wykorzystując warunki równowagi dowolnego płaskiego układu sił zbieżnych możemy
obliczyć reakcje występujące w punktach podparcia bryły obciążonej dowolnie przyłożonymi
siłami znajdującymi się na jednej płaszczyźnie. Warunki pozwalają na ułożenie tylko trzech
równań, dlatego liczba niewiadomych występujących w tych równaniach nie może być
większa od tej liczby.
Podstawy wytrzymałości materiałów
Wytrzymałością materiałów jest dział nauki zajmującą się badaniem zależności pomiędzy
kształtem części, obciążeniem i własnościami mechanicznymi materiału. Materiały stosowane
na części konstrukcyjne maszyn, charakteryzują następujące własności:
−
sprężystość, czyli zdolność powrotu do postaci pierwotnej po usunięciu obciążenia, które
wywołało odkształcenie,
−
plastyczność, tj. zdolność do odkształceń trwałych, czyli nie znikających po usunięciu
obciążeń,
−
kruchość czyli pękanie materiału zanim osiągnąłby on odkształcenie trwałe,
−
twardość czyli odporność na uszkodzenia przy wywieraniu nacisku na powierzchnię
materiału,
−
wytrzymałość określająca największą wartość obciążenia, po przekroczeniu której część
konstrukcyjna ulega zniszczeniu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
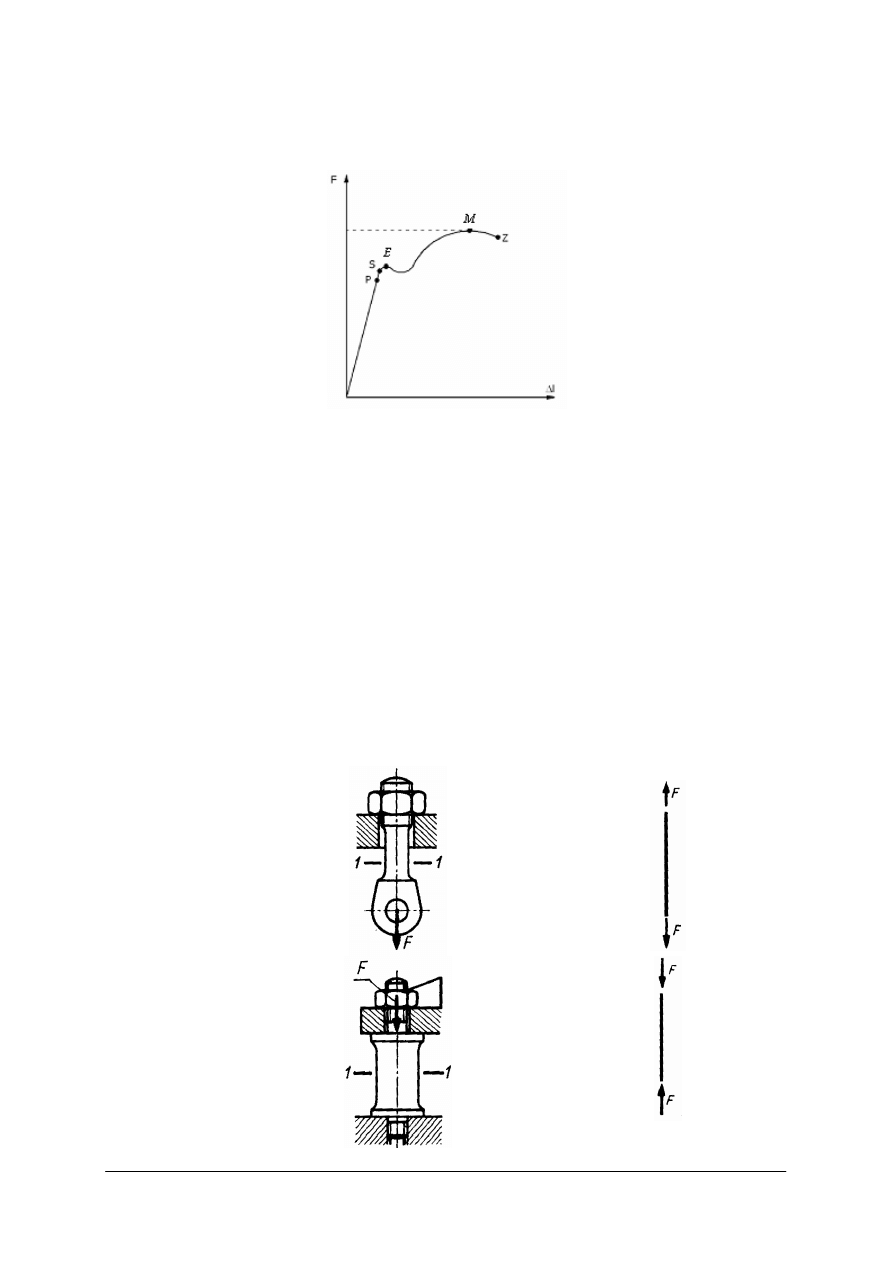
Określanie wytrzymałości materiałów konstrukcyjnych odbywa się w oparciu o badania
wytrzymałościowe (statyczna próba rozciągania) wykonywane na maszynie nazywanej
zrywarką. Wykres rozciągania próbki wykonanej ze stali niskowęglowej pokazano na rysunku 5.
Rys. 5. Wykres rozciągania dla stali niskowęglowej [wikipedia]
gdzie:
P – granica proporcjonalności dla której zależności odkształcenia od naprężenia jest
prostoliniowa i określona prawem Hooke’a.
S – granica sprężystości określająca największe naprężenie po ustaniu, którego próbka
rozciągana powraca do stanu początkowego,
E – granica plastyczności po osiągnięciu której materiał zaczyna płynąć. Niewielkie
zmiany naprężenia powodują szybki wzrost odkształcenia, materiał po usunięciu siły
nie powraca do pierwotnego kształtu,
M – maksymalna siła odkształcająca,
Z – zerwanie próbki.
Projektując elementy konstrukcyjne części maszyn należy pamiętać, aby naprężenia
powstałe pod wpływem działania sił obciążających nie przekroczyły granicznej wartość.
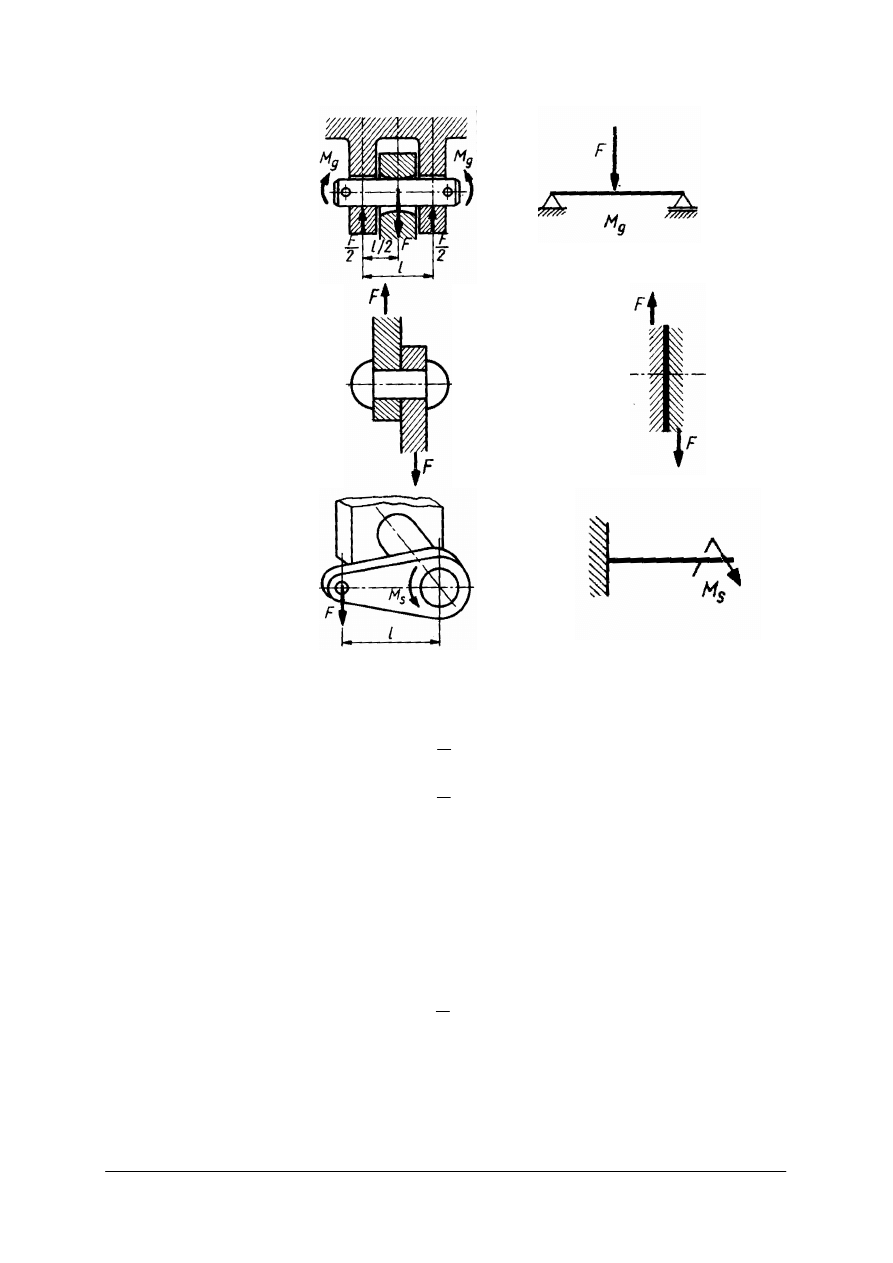
Klasyfikacja obciążeń
Typowe rodzaje obciążeń części maszyn, sklasyfikowane w zależności od sposobu
przyłożenia sił zewnętrznych do ciała zamieszczono na rysunku 6.
Rodzaj obciążenia
Przykład
Oznaczenie
Rozciąganie
Ś
ciskanie
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Zginanie
Ś
cinanie
Skręcanie
Rys. 6. Główne rodzaje obciążeń prostych [1, s. 21]
Podstawowe równania wytrzymałości materiałów przy rozciąganiu i ściskaniu można
przedstawić następująco:
c
c
r
r
k
S
F
,
k
S
F
≤≤≤≤
====
σσσσ
≤≤≤≤
====
σσσσ
gdzie:
c
r
σ
σ
,
– naprężenia rozciągające i ściskające [MPa],
c
r
k
k ,
– dopuszczalne naprężenia przy rozciąganiu i ściskaniu [MPa],
S – powierzchnia przekroju [m
2
],
F – obciążenie, siła [N].
Obliczenia konstrukcji z warunku na ścinanie przyjmuje postać:
t
k
S
F
≤≤≤≤
====
ττττ
gdzie:
τ
– naprężenie ścinające [MPa],
S – powierzchnia przekroju [m
2
],
t
k – dopuszczalne naprężenia na ścinanie [MPa],
F – obciążenie danego elementu konstrukcyjnego [N].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Praca, moc, energia, sprawność maszyn oraz tarcie należą do pojęć, którymi zajmuje się
mechanika klasyczna.
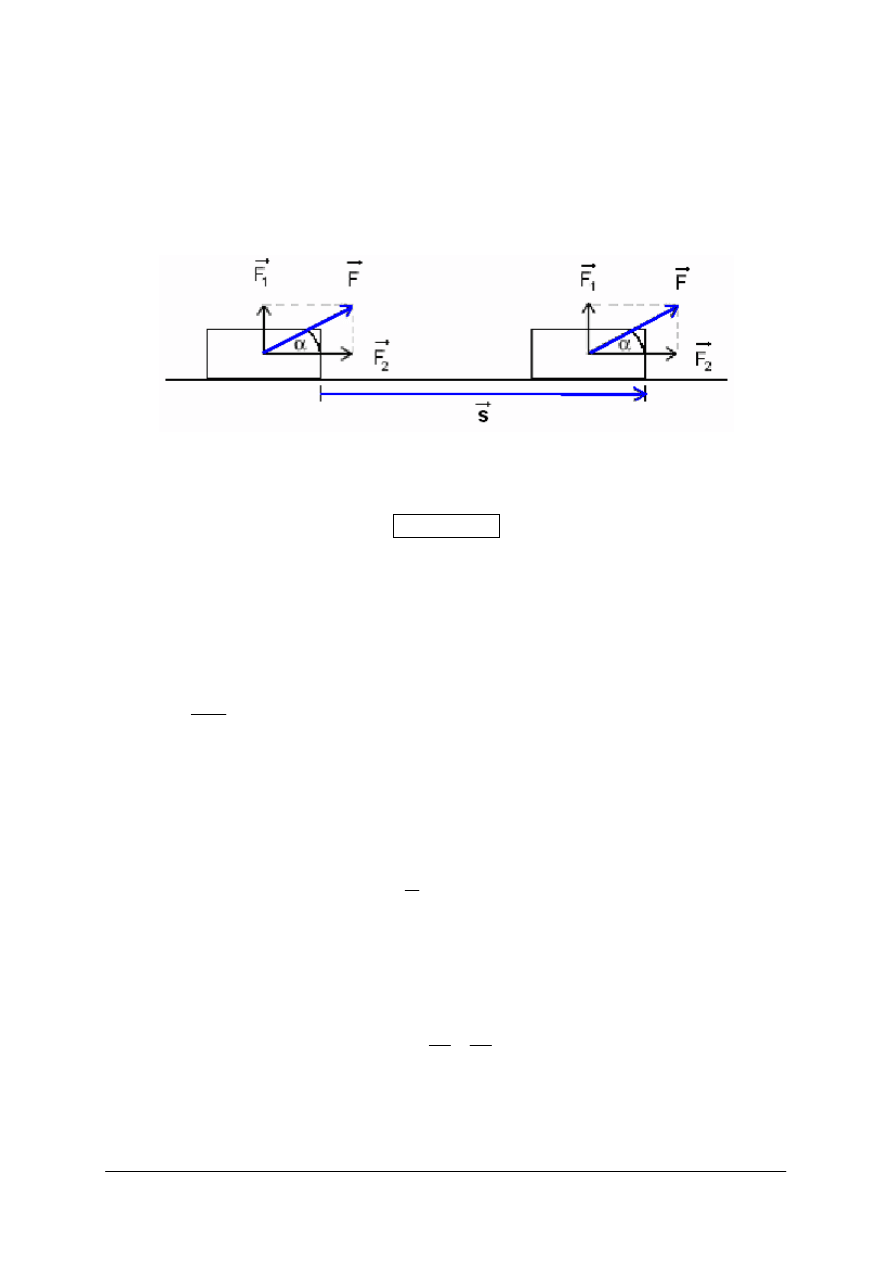
Pracą nazywamy wielkość skalarną L, określoną iloczynem siły i przesunięcia.
W oparciu o rozkład sił pokazanych na rysunku 7 możemy stwierdzić, że pracę wykonuje
tylko ta składowa siły F, która działa wzdłuż przesunięcia (F
2
). Składowa prostopadła do
przesunięcia (F
1
) nie może wykonać pracy.
Rys. 7. Rozkład sił podczas przemieszczania wózka [wikipedia]
L = F
2
⋅
s,
ale
F
2
= F
⋅
cos
α
, więc
L = F
⋅
s
⋅
cos
α
Jednostką pracy w układzie SI jest dżul. [1 dżul = 1 N
⋅
1 m = 1 J]
Sumę energii kinetycznej i potencjalnej zawartej w danym ciele nazwa się energią
mechaniczną.
E = E
k
+ E
p
gdzie:
2
mv
E
2
k
====
– energia kinetyczna ruchu postępowego masy m poruszająca się z prędkością,
v,
E
p
= mgh – energia potencjalna ciała o masie m, znajdującego się na wysokości h nad
poziomem, który przyjęliśmy jako poziom zerowy energii potencjalnej.
Jednostką energii podobnie jak pracy jest dżul.
Moc jest to stosunek pracy L do czasu w jakim została ona wykonana.
t
L
P
====
, lub P = F
⋅
v
Jednostką mocy w układzie SI jest wat
(
W). Maszyna posiada moc jednego wata, jeżeli pracę
1 dżula wykonuje w czasie 1 s.
Sprawnością
η
(eta) maszyny lub urządzeń nazywamy stosunek pracy (lub energii)
wykonanej przez tę maszynę (pracy użytecznej) do pracy doprowadzonej do maszyny.
d
u
d
u
E
E
L
L
=
=
η
Sprawność każdej maszyny jest zawsze mniejsza od jedności (0
≤
η
≤<
1).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Tarcie jest zjawiskiem występującym w maszynach i urządzeniach posiadających
ruchome elementy. Najczęściej tarcie definiowane jest jako iloczyn siły nacisku F (tzw.
normalnej siły) i współczynnika tarcia
µ
(mi), zależnego od rodzaju trących się powierzchni.
T = F
⋅µ
Najczęściej tarcie dzielimy na:
−
tarcie ślizgowe stanowiące opór przesuwania się ciał względem siebie, przy czym
występuje ono w ruchu postępowym, postępowo – zwrotnym, obrotowym i wahadłowym,
−
tarcie toczne stanowiące opór toczenia się ciał po powierzchni
Ze względu na stan ruchu w jakim znajdują się stykające powierzchnie lub jego brak,
tarcie można podzielić na:
−
tarcie statyczne (spoczynkowe) występuje wówczas, gdy ciała nie zmieniają swojego
położenia względem siebie i wyraża ono siłę, którą należy pokonać, aby zainicjować ruch
względny tych ciał,
−
tarcie dynamiczne (kinetyczne, ruchowe) to tarcie ciał znajdujących się w ruchu
względnym, wyrażające siłę, którą należy pokonać, aby trące się ciała utrzymać w ruchu.
Może ono występować jako tarcie toczne oraz ślizgowe.
Jednym ze sposobów przeciwdziałania tarciu jest stosowanie środków smarowych. Podział
tarcia ze względu na występowanie środka smarnego lub jego brak pomiędzy trącymi się
powierzchniami można dokonać na:
−
tarcie technicznie suche – gdy proces tarcia odbywa się bez udziału środka smarowego,
−
tarcie graniczne – występuje, gdy powierzchnie trące obu ciał są oddzielone warstwą
substancji smarnej o najmniejszej grubości,
−
tracie płynne – najbardziej pożądane występuje, gdy między współpracującymi
powierzchniami znajduje się warstwa substancji smarowej o znacznej grubości oraz
ciśnieniu równoważącym siły normalnego wzajemnego nacisku ciał,
−
tarcie mieszane – przypadek pośredni między tarciem suchym a płynnym.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie działy wchodzą w skład mechaniki?
2.
W jakich jednostkach miary podaje się wartość siły?
3.
Jakie wielkości definiują siłę?
4.
Jaka jest zależność pomiędzy siłą a momentem siły?
5.
Jakie warunki należy spełnić, aby dowolny układ sił znajdował się w równowadze?
6.
Jakie są typowe rodzaje obciążeń, sklasyfikowane w zależności od sposobu przyłożenia
siły?
7.
Jaka jest zależność pomiędzy energią a mocą?
8.
W jakich jednostkach wyrażamy sprawność maszyn?
9.
Co to jest tarcie?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4.1.3. Ćwiczenia
Ćwiczenie 1
Wykonaj rzutowanie sił metodą graficzną.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
przyjąć skalę wielkości siły w zależności od długości odcinka wzorcowego,
3)
przenieść w przyjętym układzie współrzędnym punkt początku i końca siły prostopadle
do osi X i je połączyć, a następnie powtórzyć czynność w stosunku do osi Y,
4)
wyliczyć wielkość otrzymanych rzutów w oparciu o przyjętą skalę,
5)
porównać ze sobą wielkość siły i jej rzutów,
6)
porównać otrzymane wyniki i zapisać wnioski.
Wyposażenie stanowiska pracy:
−
kartki papieru milimetrowego,
−
linijka, ekierka,
−
ołówek, gumka,
−
literatura z rozdziału 6.
Ćwiczenie 2
Dopasuj do przedstawionych przykładów części maszyn oznaczenia graficzne obciążeń.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
ułożyć na stole przydzielone kartki z rysunkami części maszyn a następnie posegregować
je w zależności od rodzaju obciążenia,
3)
dopasować do posegregowanych części maszyn oznaczenia graficzne obciążeń,
4)
sprawdzić poprawność wykonanego ćwiczenia,
Wyposażenie stanowiska pracy:
−
rysunki typowych części maszyn,
−
oznaczenia graficzne obciążeń części maszyn,
−
literatura z rozdziału 6.
Ćwiczenie 3
Oblicz pracę potrzebną do przesunięcia maszyny szyjącej płaskiej o masie 80 kg na
drodze 2 m. Maszyna jest przeciągana za pomocą liny usytuowanej równolegle do podłoża.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
narysować schemat sił działających na maszynę,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
3)
obliczyć ciężar maszyny ze wzoru F=mg (zakładamy że ciężar maszyny jest równy sile
potrzebnej do przesunięcia maszyny),
4)
napisać wzór na pracę i podstawić wielkości z zadania,
5)
obliczyć pracę potrzebna do przesunięcia maszyny,
6)
sprawdzić poprawność wykonanych obliczeń.
Wyposażenie stanowiska pracy:
−
kartki w kratkę,
−
przybory do pisania,
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
4.1.2. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować pojęcie siły?
2)
określić warunki płaskiego układu sił zbieżnych?
3)
określić warunki dowolnego płaskiego układu sił zbieżnych?
4)
zdefiniować pojęcie momentu siły?
5)
określić w jaki sposób oznacza się wytrzymałość materiałów
konstrukcyjnych?
6)
rozróżnić obciążenia części maszyn?
7)
zdefiniować pojęcia pracy i mocy?
8)
określić zakres sprawności maszyn?
9)
dokonać podziału tarcia?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
4.2.
Części maszyn i mechanizmy stosowane w maszynach
obuwniczych
4.2.1. Materiał nauczania
Kryteria podziału maszyn i urządzeń obuwniczych
W przemyśle obuwniczym stosowanych jest kilkaset różnorodnych typów maszyn
i urządzeń obuwniczych, których budowa uzależniona jest od przeznaczenia oraz rozwiązań
konstrukcyjnych zastosowanych przez jej producenta. Z uwagi na tak dużą liczbę urządzeń
wykorzystywanych przy produkcji obuwia, podział ich najlepiej dokonać według faz procesu
produkcji obuwia. Przyjęcie takiego kryterium podziału pozwala na usystematyzowanie
maszyn w zależności od czynności na nich wykonywanych (przeznaczenia) a nie typu lub
producenta. Najczęściej dzieli się je na:
1. Maszyny i urządzenia stosowane do rozkroju materiałów na wierzchy i spody obuwia
−−−−
wycinarki mechaniczne i hydrauliczne,
−−−−
krajarki materiałów wierzchnich i spodowych.
2. Maszyny i urządzenia stosowane do obróbki i przygotowania części wierzchnich
i spodowych do montażu
−−−−
dwojarki części spodowych i wierzchowych obuwia,
−−−−
ś
cieniarki części spodowych i wierzchowych obuwia,
−−−−
opalarki brzegów,
−−−−
formowarki, przyszew, nakładarki międzypodszewek,
−−−−
prasy do podnosków termoplastycznych,
−−−−
ś
cierarki,
−−−−
znakowarki, perforowarki,
−−−−
nakładarki kleju,
−−−−
zbijarki i prasowarki obcasów,
−−−−
formowarki elementów spodowych.
3. Maszyny stosowane do montażu cholewki
−−−−
maszyny szwalnicze,
−−−−
rozgładzarki szwów,
−−−−
krążkowarki, nitowarki, dziurkarki.
4. Maszyny stosowane do montażu obuwia
−−−−
ć
wiekarki,
−−−−
ś
rubowarki, klamerkowarki, kołkowarki,
−−−−
zszywarki, dublerki, obszywarki, przeszywarki,
−−−−
kalibrowarki, formowarki, prasy do przyklejania podeszew,
−−−−
ś
cierarki, draparki, frezarki,
−−−−
oklepywarki, formowarki pięt, wyzuwarki kopyt,
−−−−
nakładarki kleju na zaćwiekowany brzeg cholewki.
Przedstawiony podział maszyn obuwniczych nie uwzględnia wielu typów maszyn
stosowanych na etapie wykończania czy też do montażu metodą bezpośredniego wtrysku.
W budowie wszystkich maszyn i urządzeń obuwniczych stosowane są przekładnie
i mechanizmy opisane poniżej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
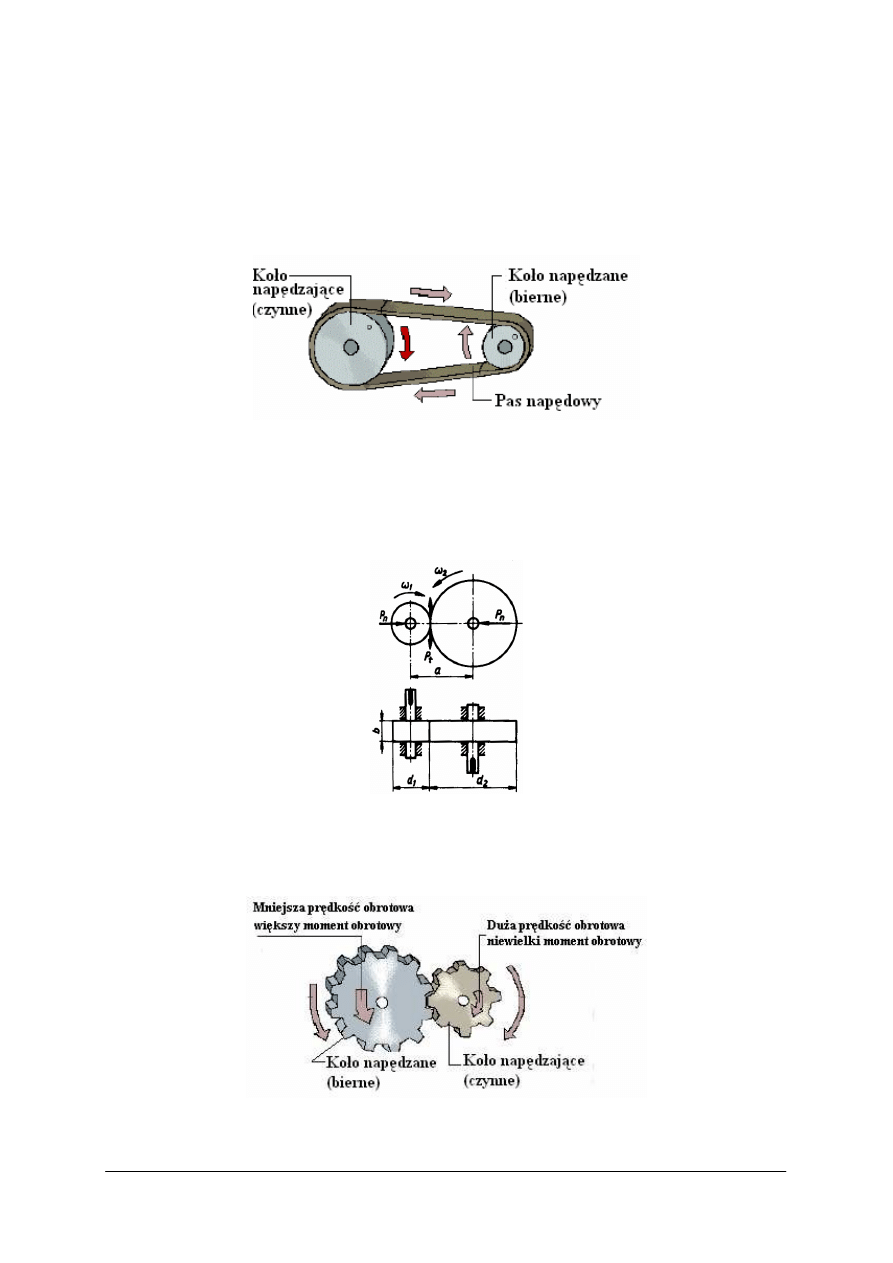
Przekładnie mechaniczne
Zadaniem przekładni mechanicznych jest zmiana prędkości obrotowej, wielkości
przenoszonych sił i momentów oraz kierunku obrotów elementów roboczych maszyn
i mechanizmów, poprzez pośrednictwo w przekazywaniu energii od silnika napędzającego.
Przekładnie mechaniczne można podzielić na:
1.
przekładnie cięgnowe (rys. 8):
Rys. 8. Przekładnia cięgnowa [wikipedia]
−−−−
pasowa z pasem płaskim,
−−−−
pasowa z pasem klinowym,
−−−−
linowa,
−−−−
łańcuchowa,
2.
przekładnie cierne (rys. 9)
Rys. 9. Przekładnia cierna [10]
3.
przekładnie zębate (rys. 10)
Rys. 10. Przekładnia zębata [wikipedia]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
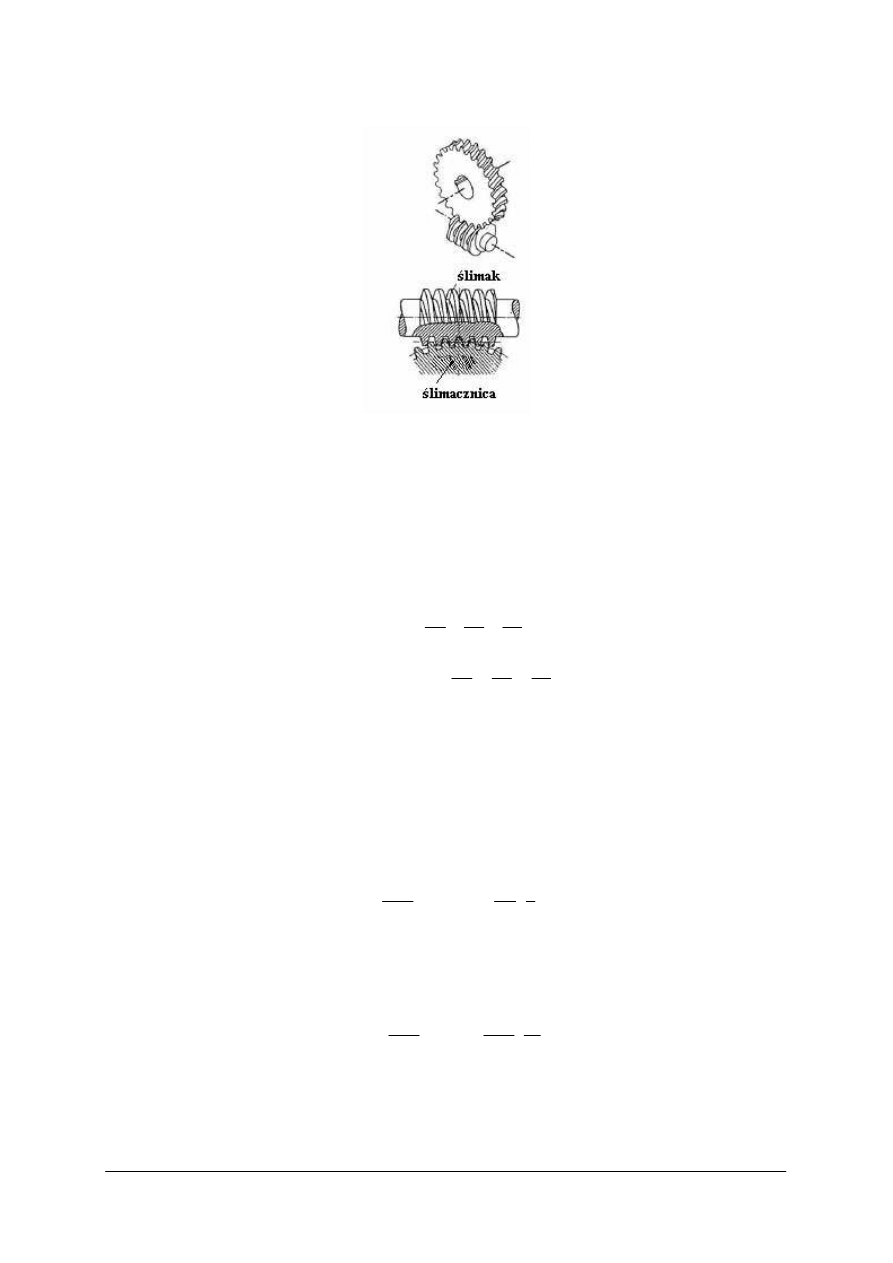
4.
przekładnie ślimakowe (rys. 11)
Rys. 11. Przekładnia ślimakowa [9. s. 365]
Przekładnie mechaniczne budowane są jako:
−
redukujące (reduktory) zmniejszające obroty n
2
<
n
1
,
−
multiplikujące (multiplikatory) zwiększające obroty n
2
>
n
1
gdzie:
n
1
– prędkość obrotowa wału czynnego,
n
2
– prędkość obrotowa wału biernego,
stąd odpowiednie przełożenia wynoszą:
−
przełożenie przekładni redukującej
1
z
z
d
d
n
n
i
2
1
2
1
1
2
r
<
=
=
=
,
−
przełożenie przekładni multiplikującej
1
z
z
d
d
n
n
i
2
1
2
1
1
2
r
>
=
=
=
,
gdzie:
z i d – liczba zębów i średnica odpowiednio koła czynnego i biernego.
Do określania przekładni mechanicznych używa się pojęć:
−
prędkość kątowa wyrażana przez kąt zakreślany podczas ruchu podzielony przez czas,
−
prędkość obrotowa która określana liczbą n obrotów wału lub koła przekładni
wykonanych w czasie jednej minuty.
Zależność pomiędzy prędkością kątową a prędkością obrotową (liczbą obrotów na
minutę) wyraża się wzorem
]
s
1
[
30
n
czyli
,
60
n
2
π
=
ω
π
=
ω
W celu wyznaczania prędkości liniowej punktu poruszającego się z prędkością kątową
ω
po torze kołowym o promienia r korzysta się z zależności
v = r
⋅
ω
co po zastąpieniu prędkości kątowej wzorem na prędkość obrotową daje zależność
]
s
m
[
60
dn
v
lub
,
60
n
2
r
v
π
=
π
⋅
=
Mechanizmy maszyn i urządzeń wykorzystywane są do uzyskiwania określonych
ruchów (o zmiennej prędkości i kierunku, według z góry ustalonego programu) niezbędnych
do prawidłowego funkcjonowania maszyn. Mechanizmy wykonawcze i elementy robocze są
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
charakterystycznymi członami i zespołami maszyn, wyróżniającymi je i decydującymi o ich
przeznaczeniu. Zapoznanie się z nimi jest pierwszym etapem poznania konstrukcji maszyn
obuwniczych, ponieważ są podstawą działania wielu z nich.
Mechanizm korbowo-wodzikowy pokazany na rysunku 12 służy do zamiany ruchu
obrotowego na ruch posuwisto-zwrotny.
Rys.12. Mechanizmu korbowo-wodzikowy [5. s. 27]
Mechanizmy korbowo-wodzikowe stosuje się w maszynach szyjących (mechanizm
igielnicy), wycinarkach mechanicznych i wielu innych do uzyskania ruchu postępowo-
zwrotnego. Mechanizmy te mogą posiadać zmienny promień korby i wtedy skok wodzika
oraz jego prędkość mogą być regulowane poprzez zmianę promienia korby.
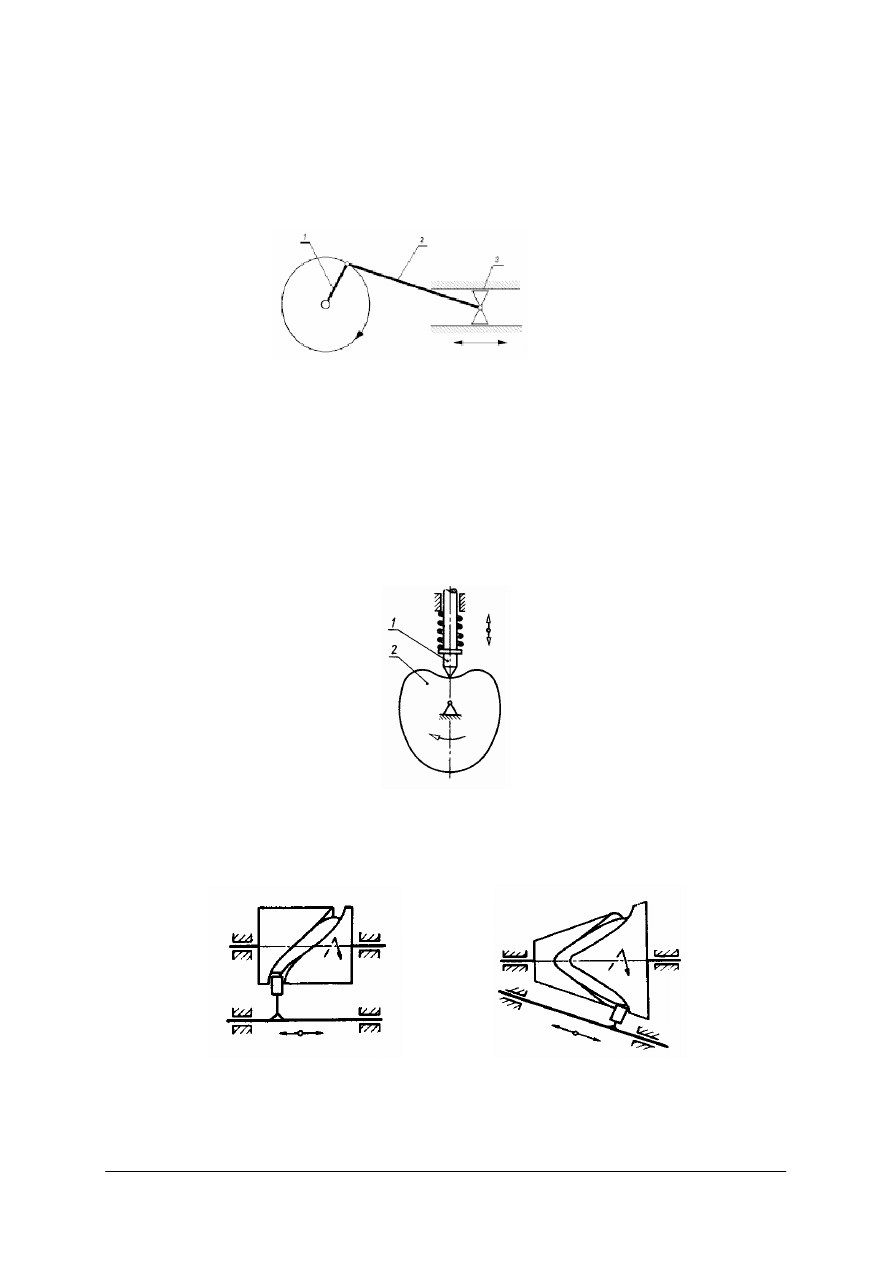
Mechanizm krzywkowy przedstawiony na rysunku 13 wykorzystywany jest w układach
mechanicznego napędu do uzyskiwania ruchów o zmiennym kierunku i prędkości,
uzależnionych od kształtu powierzchni krzywki. Mechanizm krzywkowy zbudowany jest
z popychacza 1 oraz krzywki 2. Popychacz wykonuje ruch nawrotny, natomiast krzywka
wykonująca najczęściej ruch obrotowy.
Rys. 13. Mechanizm krzywkowy [5, s. 28]
W przypadku krzywek przestrzennych, popychacz może wykonywać ruch postępowo-
zwrotny rys.14.
a)
b)
Rys. 14. Krzywka przestrzenna [5, s.28]: a) walcowa, b) stożkowa
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
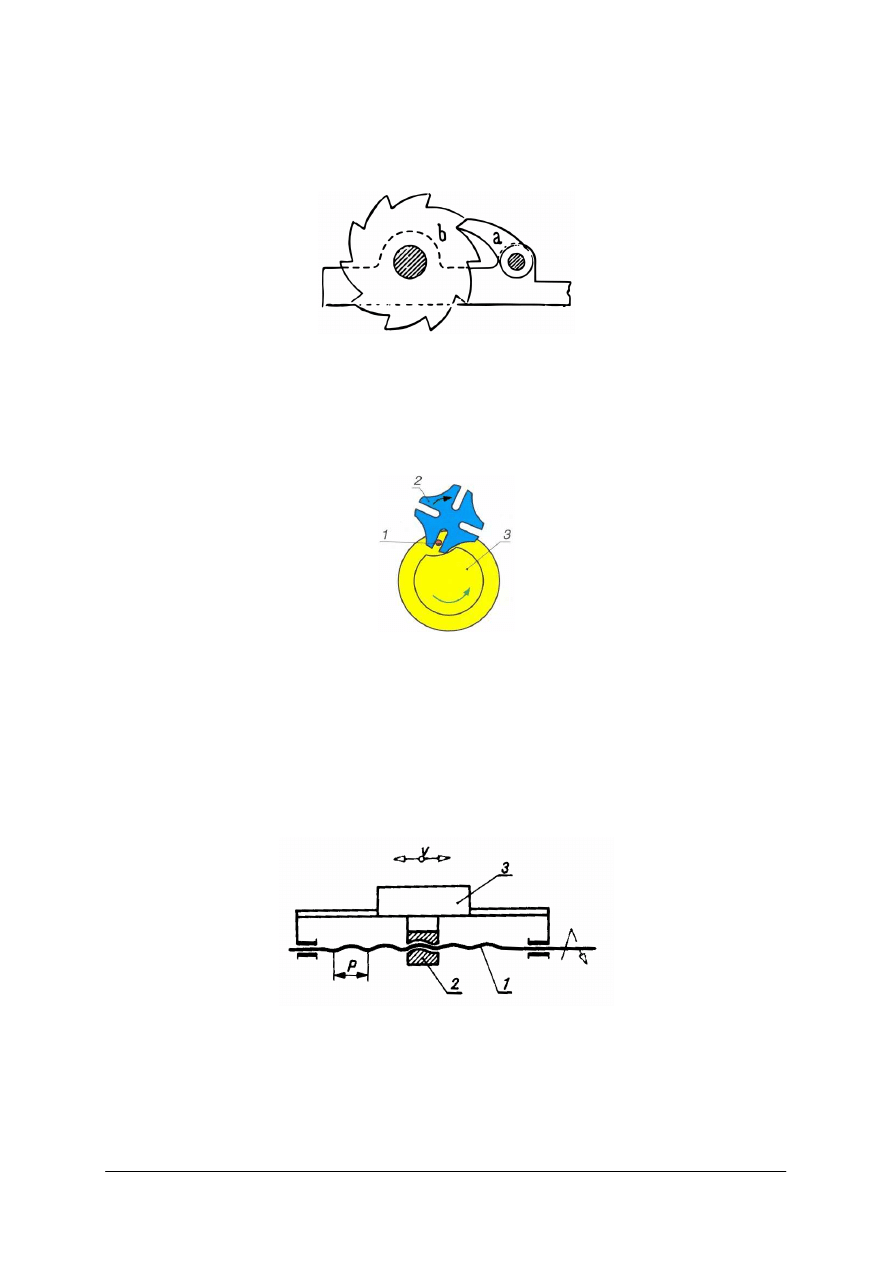
Mechanizmy ruchu przerywanego
Mechanizm zapadkowy pokazany na rysunku 15 zbudowany jest z koła zębatego b oraz
z zapadki a uniemożliwiającej ruch w wybranym kierunku. Obrót koła zębatego jest możliwy
tylko w jednym kierunku i powoduje uniesienie zapadki a następnie spadek na kolejny ząb.
Rys. 15. Mechanizm zapadkowy ograniczający ruch w jednym kierunku [wikipedia]
Mechanizm maltański pokazany na rysunku 16, nazywany również krzyżem maltańskim
służy do zamiany ruchu obrotowego na ruch obrotowy cykliczny (przerywany). Składa się
z krzyża 2 oraz tarczy 3 (korby) ze sworzniem zabierakowym 1. Elementem napędowym jest
korba, która za pośrednictwem sworznia, wykonując pełny obrót przemieszcza krzyż o ściśle
określony kąt.
Rys. 16. Mechanizm maltański [9, s.244]: 1 – sworzeń zabierakowy, 2 – krzyż, 3 – korba
Bardzo często spotykane są konstrukcje złożone z jednego mechanizmu korbowego
i kilku krzyży. W ten sposób można otrzymać układ wytwarzający wiele ruchów
przerywanych następujących po sobie.
Mechanizm śrubowy pokazany na rysunku 17, służy do zamiany ruchu obrotowego
ś
ruby na ruch postępowy nakrętki (rzadko odwrotnie). Mechanizm ten jest stosowany do
napędu posuwu maszyn, regulacji i ustalania położenia mechanizmów oraz do budowy
maszyn prostych np. podnośnik śrubowy. Składa się on ze śruby pociągowej 1
współpracującej z nakrętką 2 napędzającą suport 3.
Rys. 17. Mechanizm śrubowy [1, s.107]
Tolerancja i pasowanie części maszyn
Wymiary długościowe są to wartości długości wyrażone określonymi liczbami
odpowiednich jednostek miar, np.: 15 µm, 125,16 mm, 1,5 m.
Wymiar tolerowany jest to wymiar długościowy, dla którego zostały określone liczbowo
dopuszczalne odchyłki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Wymiar rzeczywisty jest to wartość długości, jaką otrzymano by po przeprowadzeniu
bezbłędnego pomiaru. W rzeczywistości poznaje się go tylko w pewnym przybliżeniu,
ponieważ każdy pomiar obarczony jest błędem pomiaru.
Wymiar zaobserwowany jest to wartość długości otrzymana w wyniku pomiaru
dokonanego z ustaloną dokładnością.
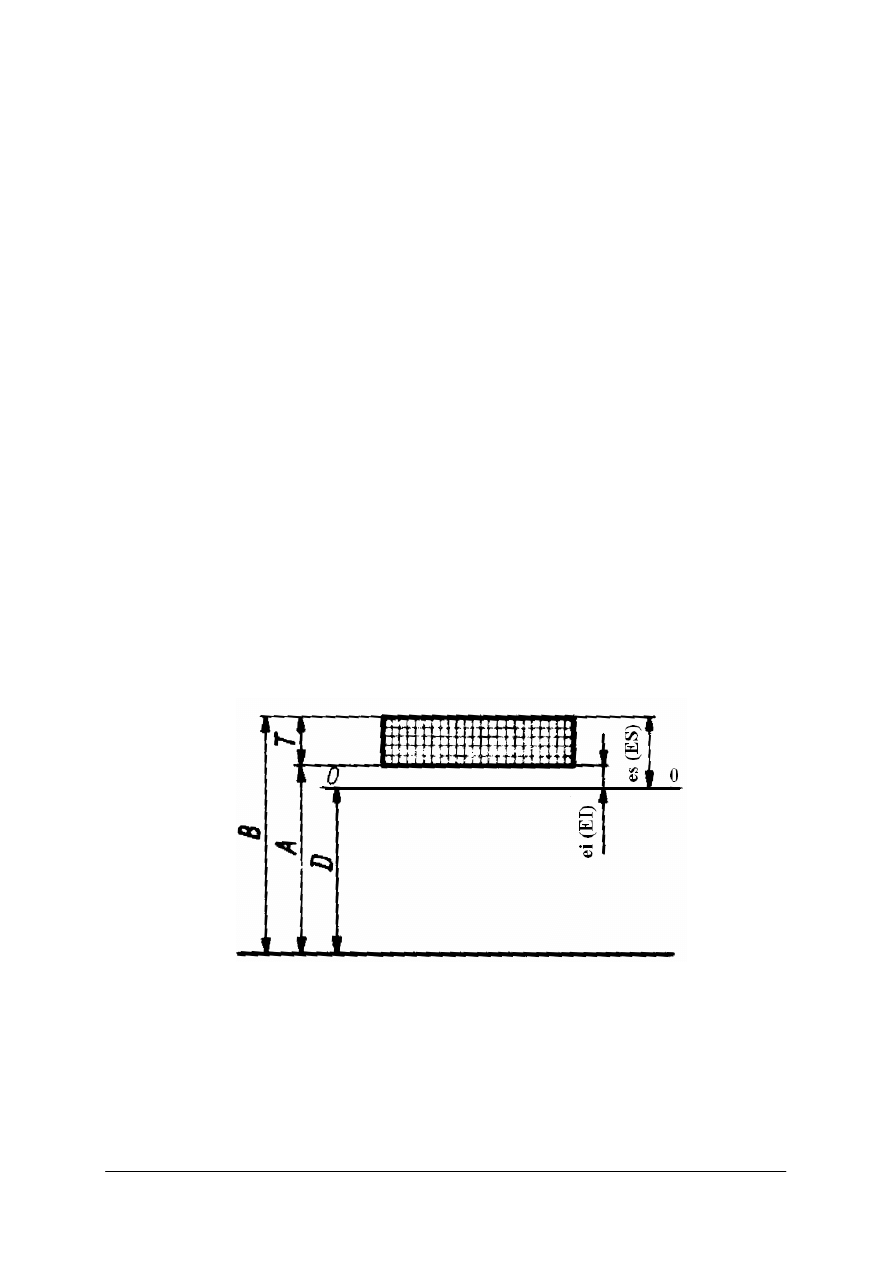
Wymiar długościowy tolerowany określają dwa wymiary graniczne:
−
wymiar górny B – większy wymiar graniczny,
−
wymiar dolny A – mniejszy wymiar graniczny.
W praktyce stosuje się zapisywanie wymiarów tolerowanych, poprzez tzw. tolerowanie
liczbowe. Wymiar tolerowany liczbowo składa się z trzech wymiarów, wyrażonych liczbami:
−
wymiaru nominalnego N,
−
odchyłki granicznej górnej es, ES,
−
odchyłki granicznej dolnej ei, EI.
Małymi literami (es, ei) oznacza się odchyłki graniczne wymiarów zewnętrznych
(wałków). Dużymi literami (ES, EI) oznacza się odchyłki graniczne wymiarów wewnętrznych
(otworów). Wymiar górny oznacza się B
w
dla wałka, B
o
dla otworu. Wymiar dolny oznacza
się A
w
dla wałka, A
o
dla otworu.
W ujęciu algebraicznym:
Odchyłka górna
N
B
es
w
−
=
- dotyczy wałka ,
N
B
ES
o
−
=
- dotyczy otworu.
Odchyłka dolna
N
A
ei
w
−
=
- dotyczy wałka ,
N
A
EI
o
−
=
- dotyczy otworu.
Tolerancja wymiaru
Tolerancja jest to różnica pomiędzy górnym wymiarem granicznym B a dolnym
wymiarem granicznym A lub pomiędzy odchyłką górna es ( ES ) a dolną ei ( EI ).
Tolerancja jest zawsze dodatnia i można ją obliczyć za pomocą wzorów.
A
B
T
−
=
lub
ei
es
T
−
=
lub
EI
ES
T
−
=
Graficznie położenie pola tolerancji przedstawia rysunek 18.
Rys. 18. Wymiary graniczne i pole tolerancji [1, s.37]
Dla wszystkich wymiarów tolerowanych przyjęto system znakowania umożliwiający
szybkie rozpoznanie ich cech szczególnych. Zapis ich wartości liczbowych może być
podawany w postaci bezpośredniej jak np.
φ
06
,
0
08
,
0
52
+
−
albo pośredniej, za pomocą umownych
symboli cyfrowo – literowych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Pasowanie, luz i wcisk pasowania
Pasowanie jest to współpraca wałka i otworu w umownym zrozumieniu znaczenia nazw
wałek i otwór. Miarą charakteru pasowania jest różnica między wymiarami otworu i wałka.
Luz jest to dodatnia lub równa zeru różnica wymiarów otworu i wałka. Wartość luzu
zaobserwowanego będzie zależała od wymiarów zaobserwowanych otworu i wałka.
Krańcowe dopuszczalne luzy, między którymi powinien być zawarty luz zaobserwowany
nazywa się luzami granicznymi.
Wcisk jest to wartość bezwzględna ujemnej różnicy wymiarów otworu i wałka przed ich
połączeniem. Gdy pasowanie jest tak zaprojektowane, że przy poprawnie wykonanych
elementach zawsze wystąpi wcisk, wówczas rozróżnić można dwa wciski graniczne, między
którymi powinien być zawarty wcisk zaobserwowany, tzn. wcisk najmniejszy W
min
i wcisk
największy W
max
.
Tolerancja pasowania T
p
jest to miara dokładności pasowania, będąca sumą tolerancji
wałka T
w
i otworu T
o
tworzących połączenie
o
w
p
T
T
T
+
=
Podział i charakterystyka pasowań
Charakter pasowania zależy od wzajemnego położenia pól tolerancji obu łączonych
elementów, zaś pasowania klasyfikuje się ze względu na mogące wystąpić odmiany miar
pasowania. Pasowania dzieli się na trzy rodzaje:
−
pasowania luźne,
−
pasowania ciasne,
−
pasowania mieszane.
Chropowatość powierzchni
Chropowatość powierzchni jest zbiorem bardzo drobnych wzniesień i zagłębień
(nierówności) występujących na tej powierzchni. Chropowatość powierzchni jest ściśle
związana ze sposobem wytwarzania przedmiotów a w szczególności zależy od rodzaju
obróbki powierzchni przedmiotów. Do określenia chropowatości powierzchni używa się
parametru R
a
, to jest średnie arytmetyczne odchylenie profilu chropowatości od linii średniej
oraz parametru R
z
(wysokość nierówności) definiowany jako średnia wartość pięciu najwyżej
położonych punktów zarysu od pięciu punktów położonych najniżej na odcinku
elementarnym mierzona od linii odniesienia równoległej do linii średniej. Gładkie
powierzchnie mają małe wartości parametru R
a
(np. 0,08
µ
m, 0,01
µ
m) natomiast
powierzchnie chropowate większe np. 200
µ
m.
Do określania chropowatości powierzchni używa się mikroskopów optycznych oraz
przyrządów nazywanych profilografometrami, które sprzężone z komputerem umożliwiają
tworzenie przestrzennych wizualizacji badanych powierzchni.
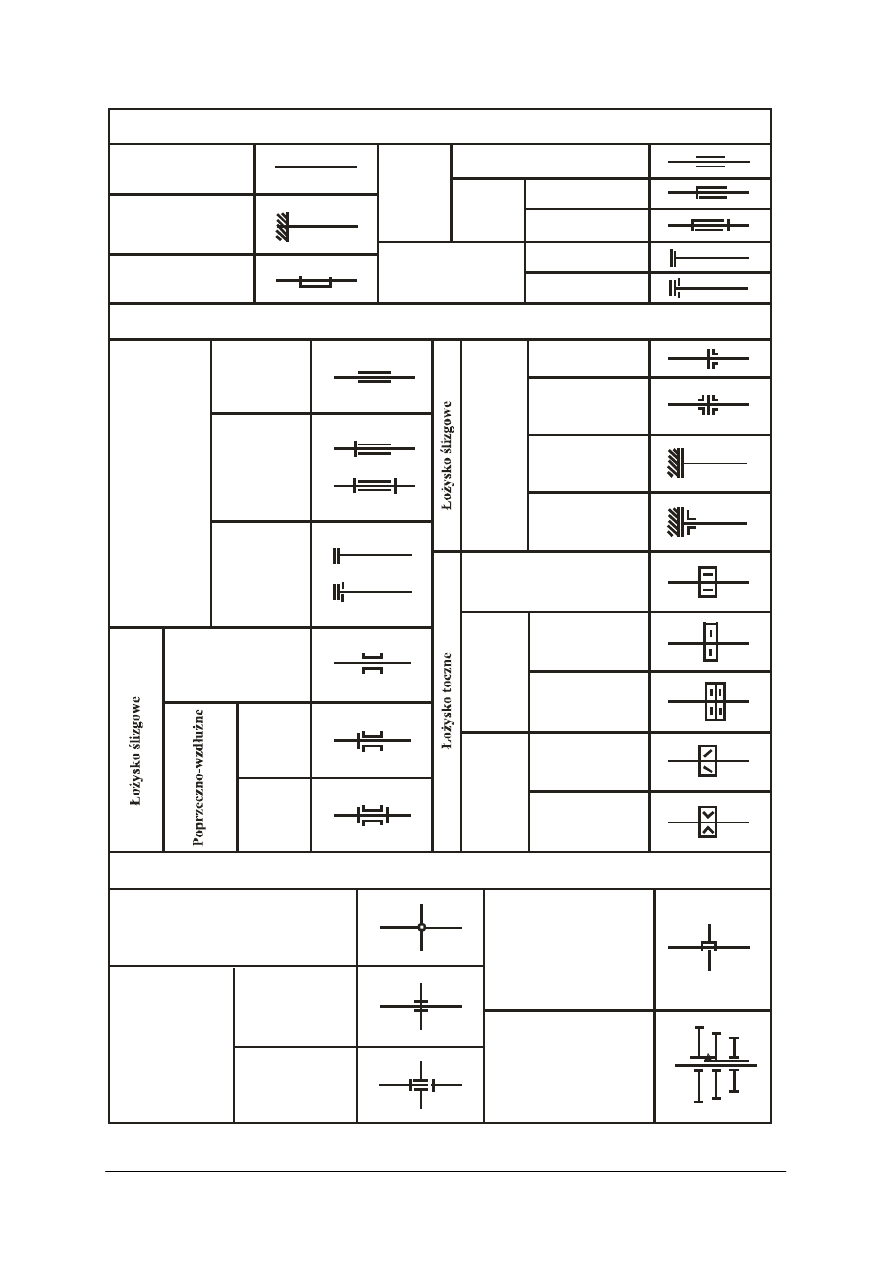
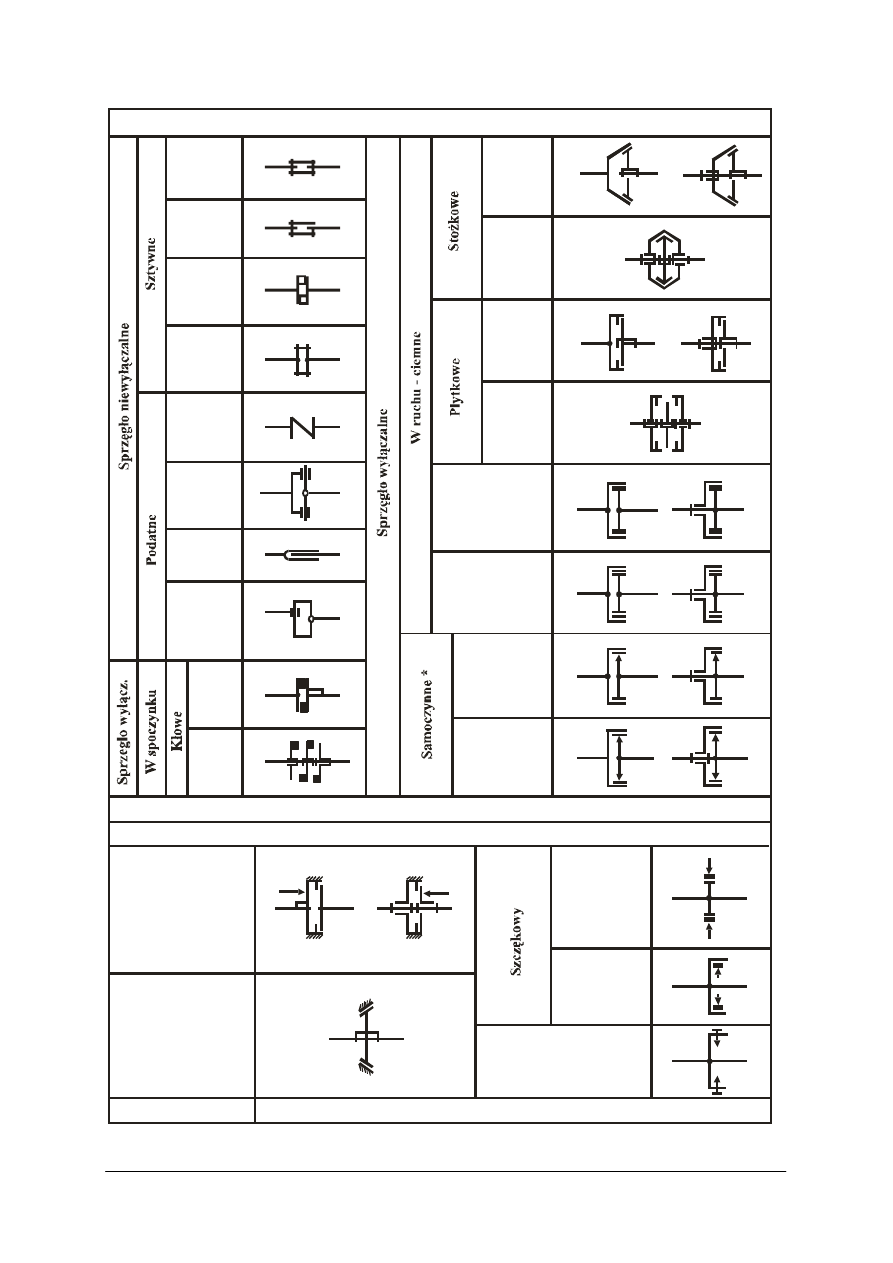
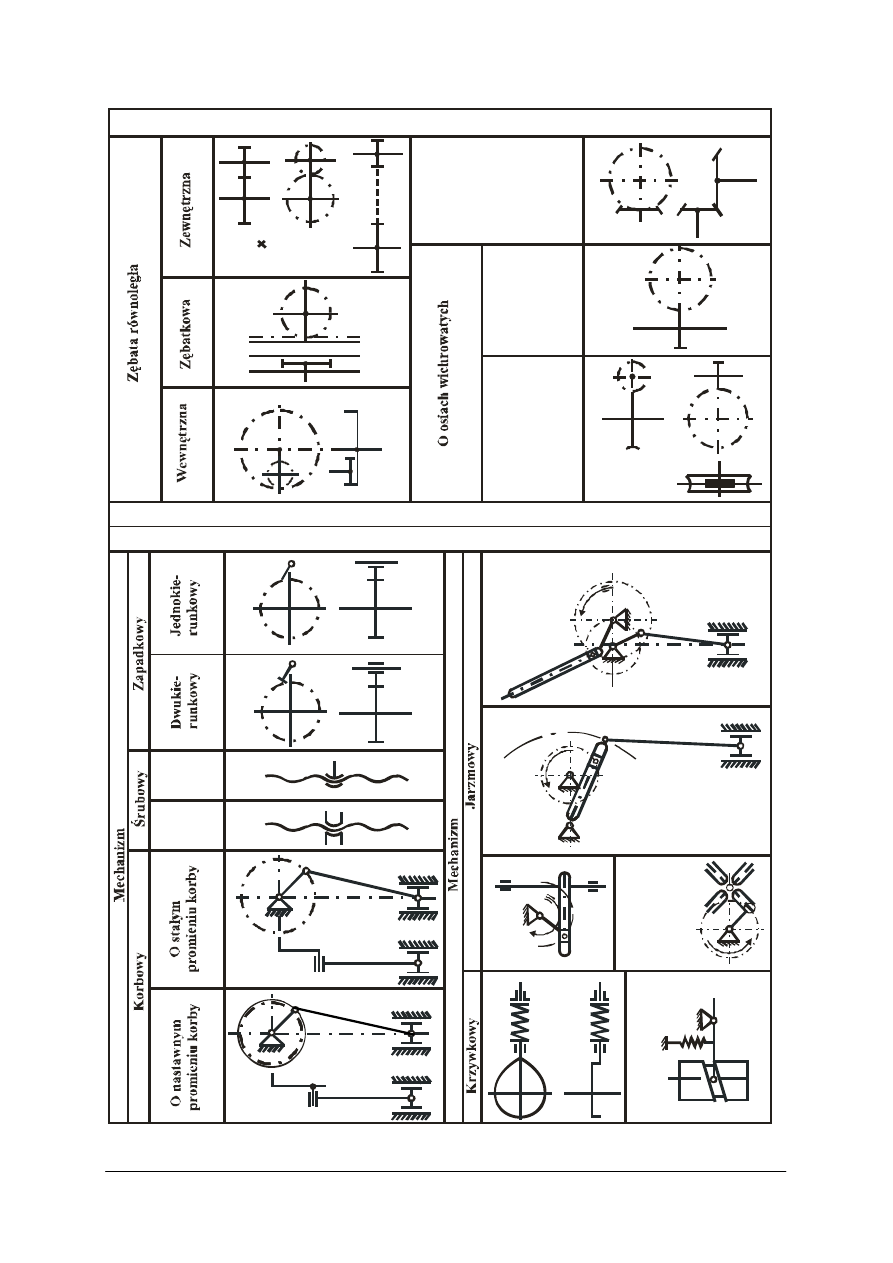
Oznaczenia mechanizmów maszyn
Schematy maszyn i urządzeń tworzone są w oparciu o uproszczone formy rysunkowe,
przedstawiające
poszczególnych
elementów
i mechanizmów.
Poznanie
oznaczeń
mechanizmów maszyn jest niezbędne do prawidłowego odczytania schematu. Na rysunkach
19-21 pokazane są oznaczenia mechanizmów stosowanych w maszynach obuwniczych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Oznaczenia wałów i osi
Wał lub oś ogólnie
Zamocowanie
sztywne
Zamocowanie
przesuwne
nieobrotowe
Zamoco-
wanie
obrotowe
Bez ograniczenia przesuwu
Jednostronnym
Dwustronnym
Z ogra-
niczeniem
przesuwu
Zamocowanie
wzdłużne
Jednokierunkowe
Dwukierunkowe
Oznaczenia łożysk
Poprzeczne
Poprzeczno-
wzdłużne
Łożysko
(ogólnie)
Wzdłużne
Wzdłużne
Jednokierunkowe
Dwukierunkowe
Końcowe
jednokierunkowe
Końcowe
dwukierunkowe
Poprzeczne
Jednokierunkowe
Dwukierunkowe
Jednokierunkowe
Dwukierunkowe
Wzdłużne
Poprzeczne
Jednokie-
runkowe
Dwukier-
unkowe
Skośne
Oznaczenia połączeń elementów z wałem
Połączenie stałe
Połączenie przesuwne
nieobrotowe
Przesuwne
Połączenie
obrotowe
Nieprzesuwne
Połączenie z wpustem
przesuwnym
Rys. 19. Oznaczenia mechanizmów maszyn obuwniczych (osie, wały i łożyska) [2, s.161]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Oznaczenia Sprzęgieł
Tulejowe
lub
kubkowe
Jedno-
stronne
Dwu-
stronne
Tulejowe
przecią-
żeniowe
Kłowe
Tarczowe
Sprężyste
(elastyczne)
Odchylne
(Cardana)
Telesko-
powe
Do wałów
niewspół-
osiowych
(przesunię-
tych)
Jedno-
stronne
Szczękowe
Perścieniowe
rozprężne
Jednokieru-
kowe
Dwukierun-
kowe
Dwu-
stronne
Jedno-
stronne
Dwu-
stronne
Zamocowanie tarcz sprzęgieł samoczynne na wale
Oznaczenia hamulców
Płytkowy
Stożkowy
Zewnętrzny
Wewnętrzny
Taśmowy
Zamocowanie tarcz hamulców na wale pokazano przykład
*
*
*
Rys. 20. Oznaczenia mechanizmów maszyn obuwniczych (sprzęgła i łożyska) [2, s.162]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Oznaczenia przekładni zębatych
Zębata kątowa
Walcowa
Ślimakowa
* gdy koła współpracujące nie mogą być przeds. Stykowo
Oznaczenia mechanizmów
Nakrętka
niedzielna
Nakrętka
dzielna
Z jarzmem obrotowym
Z jarzmem wahadłowym
Z jarzmem
Krzyż
Maltański
Przesuwnym
Z krzywką
bębnową
Z krzywką tarczową
Rys. 21. Oznaczenia mechanizmów maszyn obuwniczych (przekładnie i mechanizmy) [2, s. 164]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Wyznaczanie teoretycznej i rzeczywistej wydajność maszyn
Wydajność maszyn obuwniczych jest parametrem wpływającym na koszt produkowanego
obuwia a więc decydującym o ekonomicznym aspektach produkcji. Teoretyczna wydajność
maszyny jest uzależniona od typu maszyny, zastosowanych rozwiązań konstrukcyjnych oraz
rodzaju wykonywanej operacji technologicznej. Jest jej cechą charakterystyczną podawaną
przez producenta maszyny Rzeczywista wydajność maszyn obuwniczych jest nieco mniejsza
od wydajności teoretycznej z powodu cyklicznych strat czasu i pozacyklicznych strat czasu
wykonania operacji.
Parametry techniczne maszyn
Parametry techniczne maszyn stanowią zbiór podstawowych informacji o maszynie
podawanych przez jej producenta. Najczęściej w specyfikacji technicznej maszyny podaje się
jej przeznaczenie, rodzaj zasilania (pneumatyczne, elektryczne – napięcie, częstotliwość,
pobór mocy), informacje o gabarytach i masie maszyny, wydajności, podaje się warunki
w jakich powinna pracować (np. pomieszczenie klimatyzowane), informacje związane
z bezpieczeństwem eksploatacji itp.
Zasady smarowania, konserwacji i regulacji maszyn obuwniczych
Konstrukcja każdej maszyny obuwniczej jest tak dobrana, aby zapewnić jej długą
ż
ywotność oraz bezawaryjną pracę. Czynności związane z obsługą techniczną maszyny oraz
jej regulacją wykonuje serwis lub odpowiednia przeszkolony mechanik. Do zadań pracownika
użytkującego maszynę należy wykonywanie tylko tych czynności, które wyszczególnione są w
instrukcji maszyny i przypisane do wykonywania przez pracownika użytkującego maszynę.
Najczęściej sprowadza się to do utrzymania czystości na stanowisku pracy, wykonywania
smarowania wybranych i ściśle określonych przez producenta podzespołów maszyny
(najczęściej są to mechaniczne smarownice, które należy uruchomić po określonym czasie
pracy maszyny) oraz do ustawiania i regulacji mechanizmów wykonawczych niezbędnych do
prawidłowego wykonywania czynności na maszynie (np. ustawianie długości skoku
transportera materiału maszyn szyjących, regulacja naciągu nici górnej, ustawienie
parametrów ścieniania, ustawienie położenia kleszczy w ćwiekarce itp.).
Obliczenia wytrzymałościowe części maszyn
Połączenia spawane
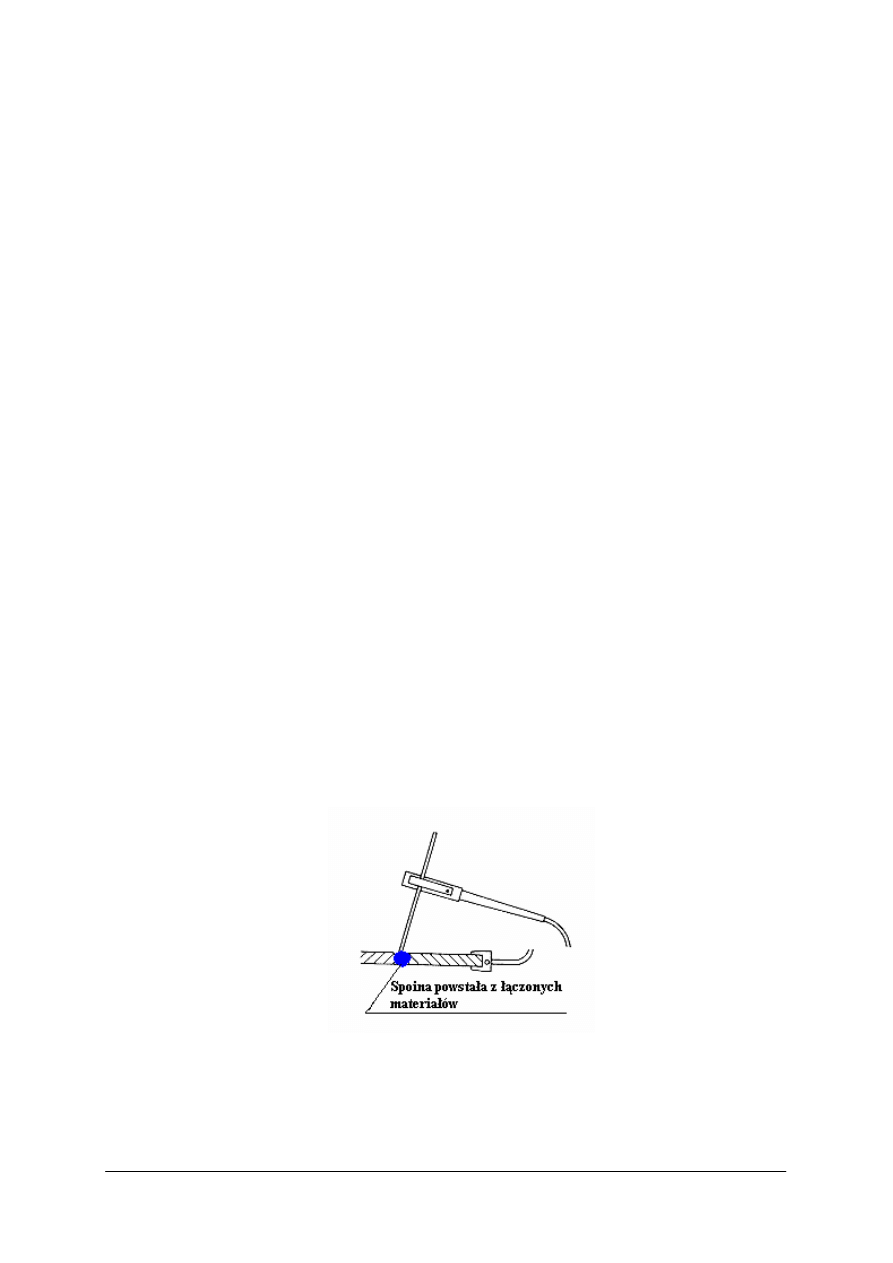
Spawanie polega na łączeniu metali przez ich miejscowe stopienie, dzięki czemu cząstki
spawanych metali wzajemnie do siebie przenikają tak jak to pokazano na rysunku 22.
Rys. 22. Połączenie dwóch metali poprzez spawanie [4, s.38]
Najczęściej stosuje się dwa rodzaje spoin tj. spoiny czołowe i pachwinowe, dla których
obliczenia wytrzymałościowe przeprowadza się według schematu:.
−
spoiny pachwinowe oblicza się z warunku na ścinanie w przekroju niebezpiecznym
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
'
t
k
S
F
≤≤≤≤
====
ττττ
gdzie:
F – siła przypadająca na jeden szew połączenia [N],
S – przekrój spoiny [m
2
],
'
t
k – naprężenia dopuszczalne przy ścinaniu spoiny;
'
t
k =0,65 k
r
Przekrój S spoiny pachwinowej o długości l obliczamy z zależności S=l·a, gdzie grubość
spoiny a=h·cos45°
≈
07 h,
−
spoinę czołową oblicza sie z warunku na rozciąganie, ściskanie, ścinanie i zginanie.
W zależności od rodzaju obciążeń stosujemy następujące wzory:
a) dla obciążeń rozciągających, ścinających i ściskających:
'
x
x
k
S
F
≤≤≤≤
====
ττττ
gdzie:
F
x
– odpowiednio F
r
, F
t
lub F
c
siła rozciągająca, ścinająca lub ściskająca spoinę
w zależności od panujących obciążeń [N],
S – przekrój spoiny [m
2
],
'
x
k – odpowiednio
'
r
k =0,9 k
r
,
'
t
k =0,65 k
r
,
'
c
k = k
r
naprężenia dopuszczalne przy
rozciąganiu, ścinaniu lub ściskaniu spoiny [MPa].
Przekrój S spoiny czołowej przyjmujemy równy przekrojowi cieńszemu z łączonych
elementów.
b) dla obciążeń zginających:
'
g
x
g
k
W
M
≤≤≤≤
====
ττττ
gdzie:
M
g
– moment zginający spoinę [Nm],
W
x
– wskaźnik przekroju na zginanie;
6
a
l
W
2
x
⋅⋅⋅⋅
====
[m
3
],
'
g
k
– naprężenia dopuszczalne przy zginaniu;
'
g
k
=0,9 k
r
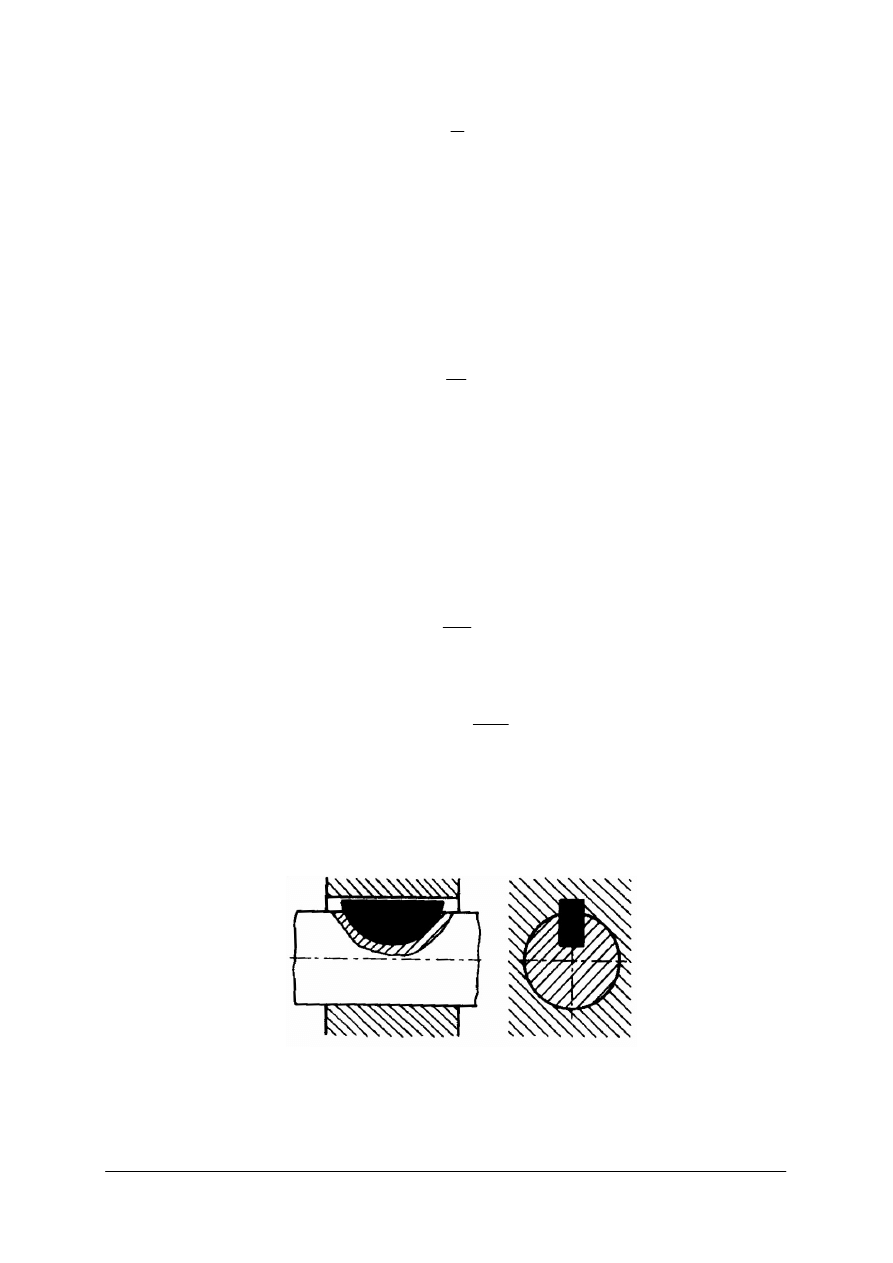
Połączenia wpustowe i wielowypustowe
Połączenia te stosujemy w częściach maszyn przenoszących moment obrotowy z wału na
piastę elementu współpracującego (sprzęgła koła pasowe, zębate itd.) lub odwrotnie. Na
rysunku 22 pokazane jest połączenie wpustowe piasty koła zębatego z wałem.
Rys. 22. Połączenie wpustowe z wpustem czółenkowym [1, s.64]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Podczas obliczania połączeń wpustowych i wielowypustowych sprawdzeniu z warunku na
naciski powierzchniowe podlega powierzchnia między bocznymi ścinani. Dla połączeń
wpustowych warunek wytrzymałościowy zapisujemy w postaci:
o
0
k
n
2
h
l
F
p
≤≤≤≤
⋅⋅⋅⋅
⋅⋅⋅⋅
====
gdzie:
F – siła obwodowa działająca na powierzchnię styku czopa i piasty [N],
h – głębokość rowka w czopie [m],
l
0
– czynna długość wpustu [m],
n – liczba wpustów,
k
o
– dopuszczalne naciski powierzchniowe [MPa].
Połączenia nitowe
Projektowanie połączeń nitowych pokazanych na rysunku 23 sprowadza się do dobrania:
–
ś
rednicy i liczby nitów,
–
wymiarów części nitowanych (pasów, blach, kształtowników),
–
wszystkich wymiarów projektowanego połączenia.
Rys. 23. Połączenie nitowe {1, s.46]; a – połączenie zakładkowe, b
÷
d – połączenia nakładkowe
Nit w połączeniu jest narażony na ścinanie w płaszczyźnie prostopadłej do jego średnicy
oraz na zniszczenie powierzchni bocznej na skutek nacisków powierzchniowych, dlatego
obliczenia prowadzone są z warunków:
−
na ścinanie
t
2
0
t
k
n
m
4
d
F
≤≤≤≤
⋅⋅⋅⋅
⋅⋅⋅⋅
⋅⋅⋅⋅
Π
Π
Π
Π
====
ττττ
−
na naciski powierzchniowe
o
0
k
d
g
n
F
p
≤≤≤≤
⋅⋅⋅⋅
⋅⋅⋅⋅
====
gdzie:
F – siła przenoszona przez połączenie nitowe [N],
d
0
– średnica otworu nitowego [m],
g – grubość łączonej blachy [m],
m – liczba ścinanych przekrojów w nicie,
n – liczba nitów w połączeniu,
k
t
– dopuszczalne naprężenia ścinające [MPa],
k
o
– dopuszczalne naciski powierzchniowe [MPa].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Oprócz obliczeń wytrzymałościowych nitów, elementy nitowane (płaskowniki, blachy,
kształtowniki) obliczamy najczęściej z warunku na rozciąganie, uwzględniając osłabienie
rozpatrywanego przekroju przez otwory nitowe
r
0
1
r
k
d
g
n
g
b
F
≤≤≤≤
⋅⋅⋅⋅
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
====
σσσσ
gdzie:
F – siła przenoszona przez elementy nitowane [N],
d
0
– średnica otworu nitowego [m],
b – szerokość płaskownika [m],
g – grubość łączonej blachy lub kształtownika [m],
n
1
– liczba nitów w połączeniu,
k
r
– dopuszczalne naprężenia rozciągające [MPa].
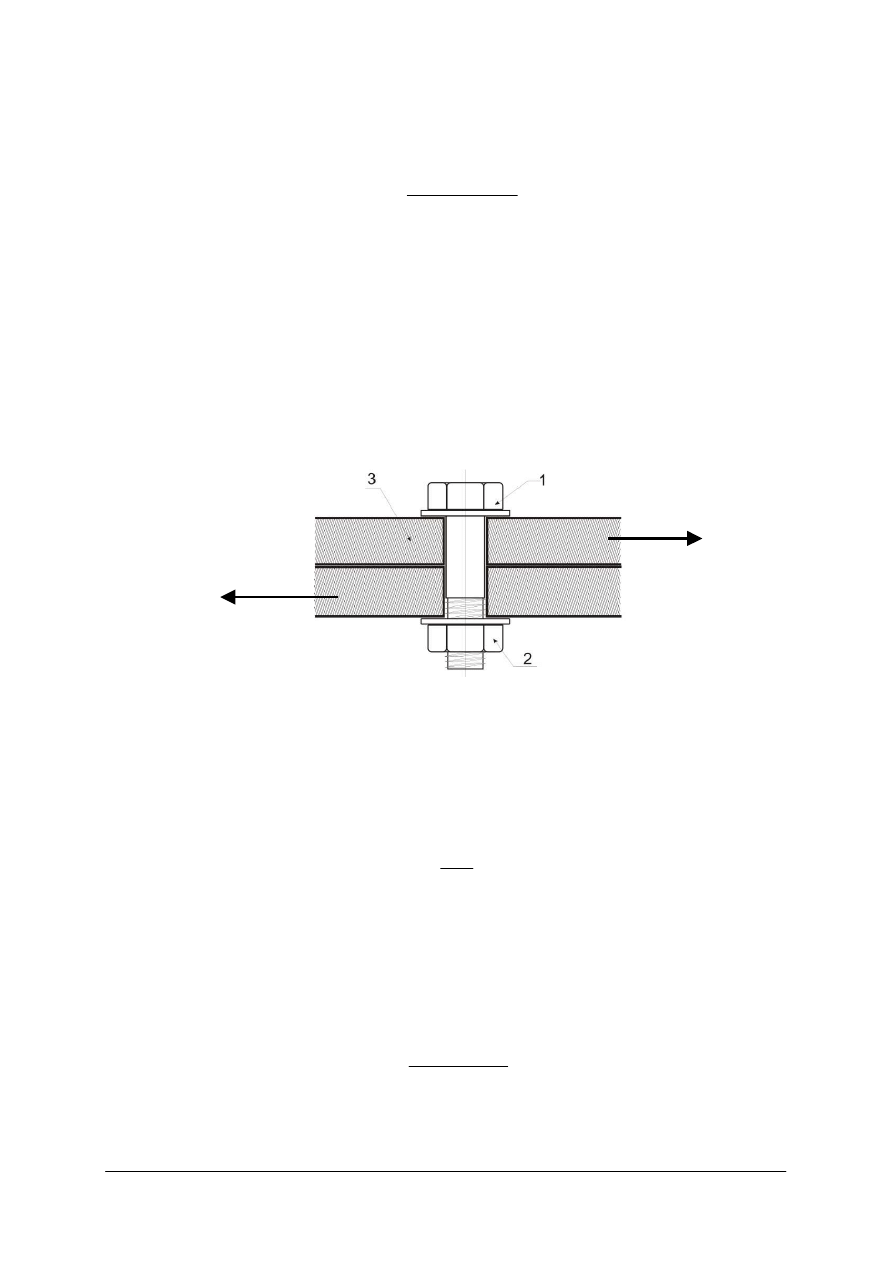
Połączenia gwintowe obciążone siłą poprzeczną
Połączenia gwintowe należą do połączeń rozłącznych. W zależności od przyjętego
rozwiązania, śruba może przenosić obciążenia wzdłużne (jest rozciągana) lub być narażona na
obciążenia siłami poprzecznymi tak jak na rysunku 24.
Rys. 24. Połączenie dwóch płaskowników za pomocą śruby i nakrętki [wikipedia]
Sposób obliczeń połączeń śrubowych obciążonych siłami poprzecznymi uzależniony jest
od sposobu osadzenia śruby w otworze. W przypadku ciasnego pasowania śruby, narażona
jest ona na ścinanie, natomiast jeśli jest zmontowana z luzem w otworze, to istnieje
możliwość jej zginania pod wpływem sił poprzecznych. W zależności od sposobu wykonania
połączenia śrubowego, obliczenia wykonujemy według wzorów:
−
z warunku na ścinanie dla połączeń ze śrubami pasowanymi ciasno
t
k
n
S
Q
≤≤≤≤
⋅⋅⋅⋅
====
ττττ
gdzie:
Q – obciążenie poprzeczne [N],
S – pole przekroju śruby [m],
n – liczba śrub przenoszących obciążenie,
k
t
– dopuszczalne naprężenia ścinające [MPa].
−
z warunku na zginanie dla połączeń ze śrubami pasowanymi luźno
r
r
k
n
S
i
k
Q
≤≤≤≤
⋅⋅⋅⋅
µµµµ
⋅⋅⋅⋅
⋅⋅⋅⋅
⋅⋅⋅⋅
====
σσσσ

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
gdzie:
Q – obciążenie poprzeczne [N],
S
r
– pole przekroju rdzenia śruby [m],
k – współczynnik pewności, najczęściej k=0,4
÷
0,8,
i – liczba powierzchni styku,
µ
- współczynnik tarcia, najczęściej w zależności od materiału łączonego i śruby oraz
rodzaju powierzchni
µ
=0,06
÷
0,5,
n – liczba śrub przenoszących obciążenie,
k
r
– dopuszczalne naprężenia rozciągające [MPa].
Osie i wały oraz ich łożyskowanie
Osiami nazywamy elementy ułożyskowane i służące do podtrzymania innych części
maszyn. Osie mogą pracować tylko na zginanie i nie są przewidziane do przenoszenia
momentu skręcającego.
Wałami nazywamy elementy służące do przenoszenia momentu obrotowego, momentu
zginającego oraz sił poprzecznych, dlatego są narażone na równoczesne skręcanie i zginanie.
Obliczenia wytrzymałościowe osi i wałów przeprowadzamy z uwzględnieniem warunków
wytrzymałościowych:
−
osie obliczamy z warunku na zginanie,
−
wały krótkie lub przenoszące tylko moment skręcający z warunku na skręcanie
w pozostałych przypadkach wały liczymy z uwzględnieniem równoczesnego zginania
i skręcania.
Łożyska ślizgowe i toczne
Łożyska służą do podtrzymania osi i wałów oraz przenoszenia obciążeń z jednego
elementu na drugi. Ze względu na budowę oraz rodzaj tarcia, łożyska dzielimy na ślizgowe
i toczne.
Obliczając wymiary łożyska ślizgowego poprzecznego postępujemy według schematu:
−
obliczamy naciski powierzchniowe na powierzchni styku czopa i panwi
−
wyznaczamy moment zginający działający na czop i obliczamy naprężenia zginające
−
obliczamy współczynnik
λ
wiążący naciski powierzchniowe i naprężenia zginające
−
obliczamy średnicę otworu panwi oraz jej długość
−
sprawdzamy łożysko na rozgrzewanie
(
)
dop
ś
r
ś
r
v
p
v
p
⋅
≤
⋅
gdzie:
v – prędkość obwodowa wyliczana z
6000
n
d
v
⋅
⋅
π
=
[m/s] (dla d w cm, a n w obr/min)
v
p
ś
r
⋅
- umowna miara ciepła wytwarzanego w łożysku przez tarcie.
W przypadku obliczania łożysk ślizgowych wzdłużnych korzystamy tylko z warunku na
naciski powierzchniowe i sprawdzamy je z warunku na rozgrzewanie.
Łożyska toczne są znormalizowane i ich dobór polega na ustaleniu typu łożyska oraz jego
wymiarów. Głównym zadaniem przy obliczaniu łożysk tocznych jest dobranie łożyska
spełniającego rzeczywiste warunki pracy i eksploatacji. Dobierając łożysko o nośności
C odpowiednio wyższej od rzeczywistego obciążenia łożyska, zapewniamy uzyskanie
odpowiedniej trwałości.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
p
F
C
L
=
gdzie:
L – trwałość łożyska w mln obrotów,
C – nośność ruchowa łożyska podane w katalogach,
F – obciążenie zastępcze
P – wykładnik potęgowy; dla łożysk kulkowych p = 3, dla wałeczkowych p = 10/3
Sprzęgła i hamulce
Sprzęgłem nazywamy zespół układu napędowego maszyn służący do łączenia wałów
umożliwiający przenoszenie momentu obrotowego bez zmiany jego kierunku. Obliczanie
sprzęgieł sprowadza się do wyznaczenia przenoszonego momentu obrotowego oraz obliczenia
wymiarów łącznika lub na ustaleniu wymiarów sprzęgła w zależności od rodzaju sił (np.
tarcia). Podstawowym parametrem charakteryzującym pracę sprzęgła jest wielkość
przenoszonego momentu obrotowego, który obliczamy ze wzoru:
n
P
9550
M
=
[Nm]
gdzie:
P – moc podana w [kW]
n – prędkość obrotowa podana w [obr/min].
W zależności od rodzaju sprzęgła, obliczenia przeprowadzamy według schematu:
1. sprzęgła tulejowe kołkowe
−
określamy maksymalną siłę F działającą na jeden przekrój kołka,
−
z warunku na ścinanie obliczamy średnicę oraz liczbę kołków.
2. sprzęgła kołnierzowe
−
dobieramy z norm,
−
ś
ruby łączące kołnierze liczymy z warunku na ścinanie (podobnie jak dla połączeń
ś
rubowych) uwzględniając, że śruby mogą być pasowane w kołnierzu ciasno lub luźno,
3. sprzęgła cierne
−
obliczamy moment tarcia jaki powinno przenieść sprzęgło (musi on być większy od
momentu obrotowego sprzęgła),
−
sprawdzamy powierzchnie cierne z warunku na naciski powierzchniowe,
−
sprawdzeniu sprzęgła na rozgrzewanie (podobnie jak łożyska ślizgowe).
Hamulcem nazywamy urządzenie służące do zmniejszania prędkości obrotowej
i zatrzymywania obracających się części maszyn. W budowie maszyn najczęściej spotykamy
się z hamulcami ciernymi budowanymi jako hamulce: klockowe i cięgnowe. W obliczeniach
hamulców klockowych wyznaczamy wartość momentu tarcia (podobnie jak w przypadku
sprzęgieł) i z warunku na naciski powierzchniowe obliczamy długość (mierzoną po cięciwie
łuku) klocka. Hamulce sprawdzamy na rozgrzewanie według tego samego wzoru, co łożyska
ś
lizgowe i sprzęgła cierne.
Hamulce cięgnowe w porównaniu z hamulcami klockowymi mają większą skuteczność
hamowania i dlatego stosowane są do regulacji prędkości wałów przenoszących duże wartości
momentu obrotowego. Hamulce te dzielimy na różnicowe i sumowe i obliczanie ich polega na
określeniu momentu tarcia potrzebnego do zahamowania bębna, wartości siły w cięgnie oraz
na wyznaczeniu wartości siły, jaką należy wywierać na dzwignię hamulca.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jakie jest zadanie przekładni mechanicznej?
2.
W jakich jednostkach miary podaje się prędkość kątową?
3.
Od czego zależy przełożenie przekładni?
4.
Jakie mechanizmy wykorzystywane są w maszynach obuwniczych?
5.
W jaki sposób obliczamy tolerancję?
6.
Co to jest chropowatość powierzchni i od czego ona zależy?
7.
W jakich jednostkach podaje się dopuszczalne naprężenia?
8.
Jakie naprężenia przenoszą osie a jakie wały?
9.
Jaka jest różnica pomiędzy sprzęgłem a hamulcem?
4.2.3. Ćwiczenia
Ćwiczenie 1
Dopasuj odpowiednie nazwy od przekładni i mechanizmów maszyn.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
poukładać rysunki z przekładniami i mechanizmami maszyn,
3)
wypisać na kartkach samoprzylepnych nazwy przekładni i mechanizmów,
4)
przyporządkować kartki z nazwami do odpowiednich przekładni i mechanizmów,
5)
sprawdzić poprawność wykonanego ćwiczenia,
Wyposażenie stanowiska pracy:
−
kartki z rysunkami różnych mechanizmów maszyn i przekładni mechanicznych,
−
kartki samoprzylepne,
−
przybory do pisania,
−
literatura z rozdziału 6.
Ćwiczenie 2
Oblicz przełożenie przekładni pasowej jeśli koło czynne wykonuje 200 obr/min a koło
bierne 50 obr/min.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
narysować schemat przekładni i zaznaczyć prędkości obrotowe odpowiednich kół,
3)
napisać wzór na obliczanie przełożenia przekładni mechanicznych,
4)
podstawić wielkości prędkości kół do wzoru na przełożenie przekładni,
5)
obliczyć przełożenie przekładni pasowej,
6)
sprawdzić poprawność wykonanych obliczeń.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Wyposażenie stanowiska pracy:
−
kartki papieru,
−
przybory do pisania,
−
ołówek, gumka,
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
Ćwiczenie 3
Oblicz prędkość liniową pasa klinowego przekładni pasowej maszyny szyjącej płaskiej,
jeśli silnik elektryczny na którym osadzone jest koło pasowe o średnicy d=12 mm wykonuje
n=860 obr/min.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować polecenie zawarte w treści ćwiczenia,
2)
wyrazić średnicę koła przekładni w metrach,
3)
napisać wzór na prędkość liniową punktu poruszającego się z prędkością kątową po
okręgu,
4)
podstawić wielkości z zadania do wzoru,
5)
obliczyć prędkość liniową pasa,
6)
sprawdzić poprawność wykonanych obliczeń.
Wyposażenie stanowiska pracy:
−
kartki papieru,
−
przybory do pisania,
−
kalkulator,
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
4.2.2. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
dokonać podziału przekładni mechanicznych?
2)
zdefiniować pojęcie przełożenia przekładni mechanicznej?
3)
określić zależność pomiędzy prędkością liniową a kątową?
4)
rozróżnić elementy mechanizmy korbowo-wodzikowego?
5)
zdefiniować pojęcia pola tolerancji?
6)
określić warunki z jakich obliczamy połączenia spawane?
7)
określić obciążenia przenoszone przez nit?
8)
zdefiniować pojęcia: oś i wał?
9)
przedstawić kolejność obliczeń sprzęgła ciernego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
4.3.
Napędy stosowane w maszynach obuwniczych
4.3.1. Materiał nauczania
Podstawy działania napędów elektrycznych
Przepływ prądu elektrycznego przez przewodnik, powoduje wytwarzanie wokół niego
pola elektromagnetycznego, które oddziałując na inne pole magnetyczne, elektryczne lub na
materiały magnetyczne wytwarza siłę elektrodynamiczną wprawiającą w ruch wirniki
silników elektrycznych. W zależności od rodzaju zasilania, wyróżnia się silniki prądu stałego
oraz silniki prądu zmiennego.
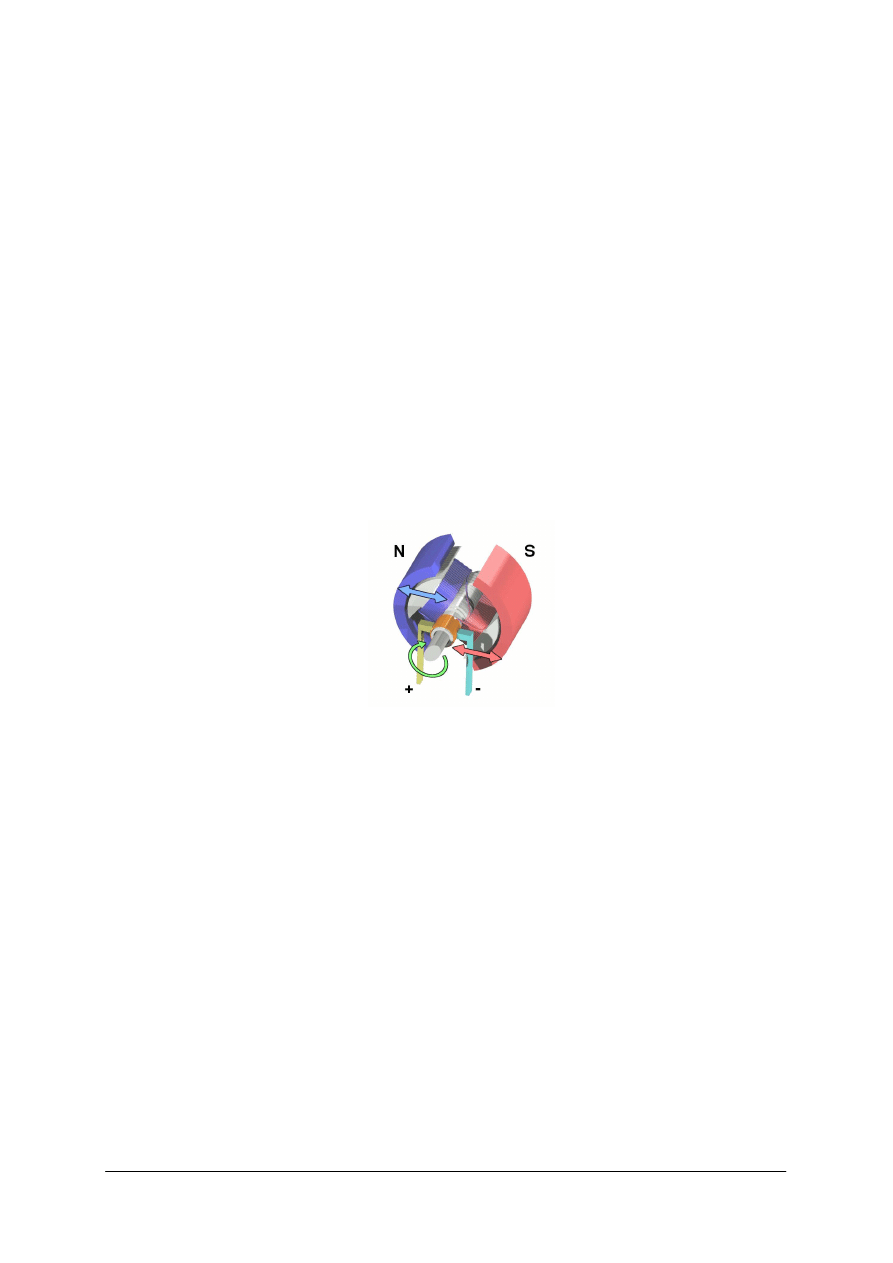
Budowa i zasada działanie silnika prądu stałego
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów stałych zwróconych
do siebie biegunami różnoimiennymi, w taki sposób, aby pomiędzy nimi było pole
magnetyczne (rys. 25). Pomiędzy magnesami znajduje się wirnik z nawiniętymi w kształcie
ramki lub kilku ramek przewodami podłączonymi do źródła prądu poprzez komutator
i ślizgające się po nim szczotki. Przepływający przez przewód prąd elektryczny generuje pole
magnetyczne oddziaływujące na pole magnetyczne pochodzące od magnesów trwałych
wytwarzając w ten sposób moment obrotowy. Ramka wychyla się z położenia poziomego,
obracając się wokół osi.
Rys. 25. Schemat budowy silnika prądu stałego [wikipedia]
Po przejściu położenia pionowego ramki, szczotki znów dotykają styków na komutatorze,
ale odwrotnie, prąd płynie w przeciwnym kierunku, dzięki czemu ramka w dalszym ciągu jest
obracana w tym samym kierunku
Silniki prądu przemiennego
Silniki komutatorowe prądu przemiennego są zbliżone konstrukcyjnie do silników
szeregowych prądu stałego, z tym, że magnes stały (stojan) zastąpiono stojanem zbudowanym
z cewki nawiniętej na rdzeniu z blach stalowych. Są one zwykle zasilane z sieci jednofazowej.
Charakteryzują się dość dużym momentem rozruchowym i dużą prędkością obrotową.
Znajdują zastosowanie w urządzeniach gospodarstwa domowego, a w przemyśle do napędu
urządzeń automatyki.
Silniki indukcyjne buduje się w dwóch odmianach, jako jednofazowe i trójfazowe. Są one
powszechnie stosowane do napędu maszyn i urządzeń obuwniczych. Zasada działania silnika
indukcyjnego pokazanego na rysunku 26, polega na wykorzystaniu wirującego pola
magnetycznego, które uzyskuje się w wyniku nakładania się na siebie zmiennych pól
magnetycznych wytworzonych przez poszczególne uzwojenia stojana zasilane prądem
zmiennym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 26. Schemat budowy silnika klatkowego prądu zmiennego [wikipedia]
Pole to oddziałuje na przewody nieruchomego na początku wirnika i na zasadzie indukcji
elektromagnetycznej, powoduje wzbudzenie w nich przepływu prądu elektrycznego.
Przewody uzwojeń wirnika, w których płyną zaindukowane prądy, „pociągane” są przez
wirujące pole magnetyczne, wprawiając wirnik w ruch obrotowy.
Napędy i sterowanie pneumatyczne i hydrauliczne
Napęd pneumatyczny jest to napęd mechanizmów maszyn i urządzeń przy
wykorzystaniu energii sprężonego gazu (zazwyczaj powietrza).
Urządzenia układów napędu i sterowania pneumatycznego można podzielić na:
Urządzenia części wykonawczej, do których można zaliczyć: urządzenia przetwarzające
energię czynnika na pracę mechaniczną (silniki pneumatyczne o ruch obrotowym, silniki
pneumatyczne o ruchu wahadłowym, silniki pneumatyczne o ruchu postępowo-zwrotnym),
urządzenia sterujące energią sprężonego powietrza (zawory pneumatyczne sterujące
kierunkiem przepływu, zawory pneumatyczne sterujące ciśnieniem, zawory pneumatyczne
sterujące natężeniem przepływu).
Urządzenia części centralnej takie jak: urządzenia pneumatyczne dyskretne do poboru
i wprowadzania informacji do części centralnej układu (przekaźniki pomiarowe
pneumatyczne, urządzenia ręcznego wprowadzania informacji, pneumatyczne urządzenia
automatycznego wprowadzania informacji), urządzenia pneumatyczne dyskretne do
przetwarzania i wydawania informacji (pneumatyczne urządzenia przetwarzania informacji,
pneumatyczne urządzenia wskazujące, pneumatyczne urządzenia rejestrujące), urządzenia
pneumatyczne do przekształcania informacji: przetworniki różnych poziomów ciśnienia
sygnałów, przetworniki różnych postaci sygnałów, przetworniki różnych nośników sygnałów.
Urządzenia pomocnicze urządzenia przygotowujące czynnik w układach (oddzielacze
pneumatyczne, smarownice pneumatyczne, wymienniki ciepła pneumatyczne), urządzenia do
przewodzenia i gromadzenia czynnika w układach pneumatycznych (przewody
pneumatyczne,
łączniki
pneumatyczne,
zbiorniki
pneumatyczne,
tłumiki
hałasu
pneumatyczne.
Napęd pneumatyczny jest najbardziej rozpowszechniony w maszynach i urządzeniach
obuwniczych do realizacji przesuwów mechanizmów oraz wywoływania określonego nacisku
statycznego.
Sprężarki są to maszyny służące do sprężania powietrza i innych gazów, od niższego
ciśnienia ssania do wyższego ciśnienia tłoczenia. W zależności od zasady działania, sprężarki
dzieli się na wyporowe i wirowe (przepływowe).
Do sprężarek wyporowych zalicza się: tłokowe (o posuwisto-zwrotnym ruchu tłoka),
rotacyjne (o obrotowym ruchu organu roboczego).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Sprężarki wirowe (przepływowe) dzieli się na: promieniowe (o promieniowym
przepływie gazu), osiowe (o osiowym przepływie gazu), promieniowo-osiowe (o ukośnym
przepływie gazu).
Sprężarki są szeroko stosowane zarówno w przemyśle (napęd różnego rodzaju narzędzi –
kluczy pneumatycznych, szlifierek, wiertarek, młotów, piaskowanie, malowanie natryskowe,
dystrybucja gazów technicznych, pompowanie opon samochodowych, przetłaczanie gazu
ziemnego, podnoszenie ciśnienia w układach turbin gazowych, turbodoładowanie silnika
spalinowego) jak i w gospodarstwie domowym (chłodziarka, wentylator, i inne).
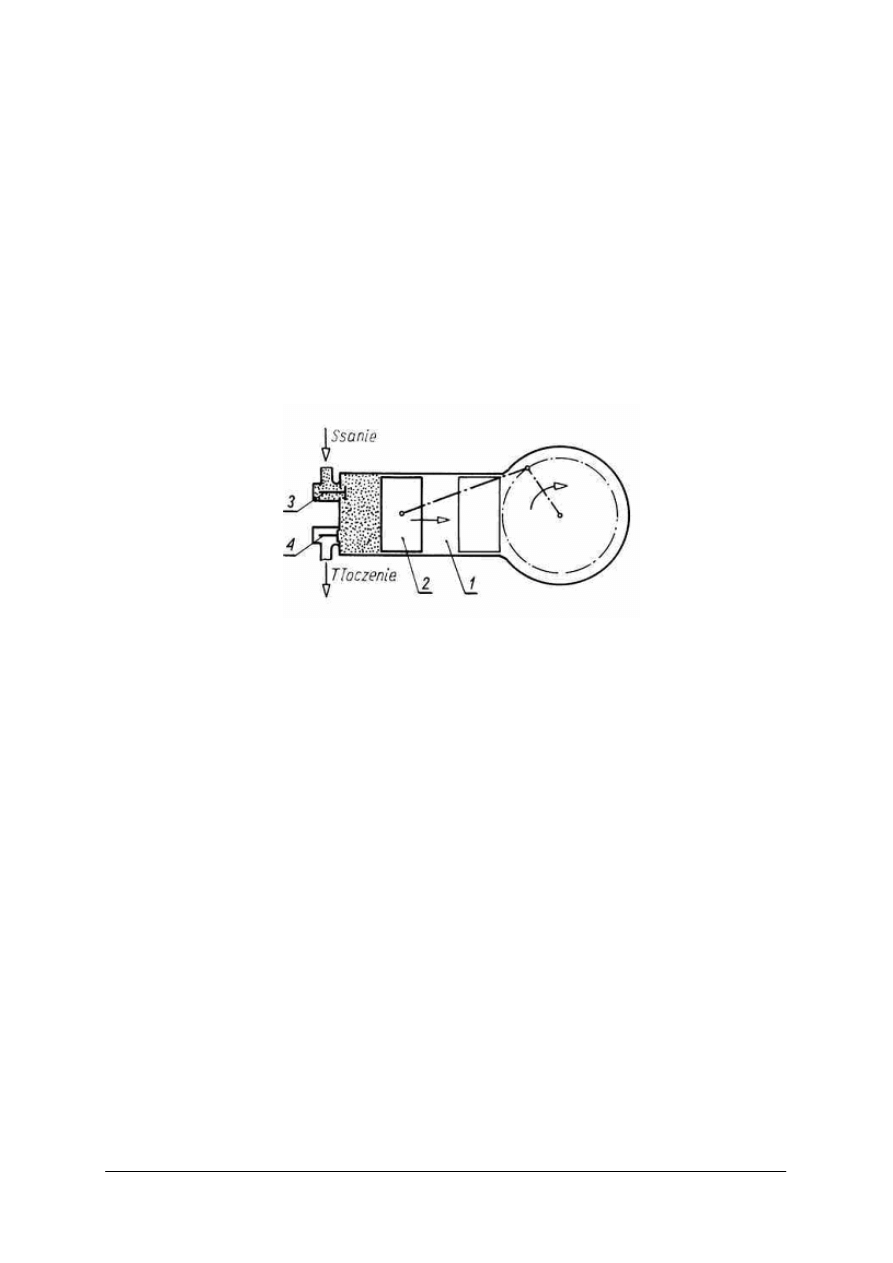
Sprężarki tłokowe są to urządzenia charakteryzujące się postępowo-zwrotnym ruchem
tłoka i należą do grupy sprężarek objętościowych. Działanie sprężarki tłokowej polega na
sprężaniu przez tłok 2 gazu w cylindrze 1 sprężarki. Zawory ssawne 3 i tłoczne 4
w odpowiednich fazach pracy maszyny otwierając się i zamykając umożliwiają zasysanie
gazu do cylindra oraz odprowadzenie sprężonego czynnika. Budowa sprężarki tłokowej
pokazana jest na rysunku 27.
Rys. 27. Schemat sprężarki jednostopniowej [1, s.209]
1 – cylinder, 2 – tłok, 3 – zawór ssawny, 4 – zawór tłoczny
Sprężarki rotacyjne są to urządzenia, w których zwiększanie ciśnienia gazu następuje
wskutek ruchu obrotowego organu roboczego. Buduje się je jako jedno- i dwustopniowe.
Sprężarka promieniowa (rys. 28) to taka, w której przepływ gazu przez wirnik jest
promieniowy. Sprężarki promieniowe charakteryzują się wysoką sprawnością gdy pracują
przy parametrach nominalnych.
Sprężarka osiowa to taka, w której przepływ gazu przez wirnik jest osiowy. Sprężarki
osiowe charakteryzują się wysoką sprawnością gdy pracują przy parametrach nominalnych.
Charakteryzują się wysoką wydajnością przepływu przy stosunkowo małych wymiarach
poprzecznych oraz niskim stopniem sprężania.
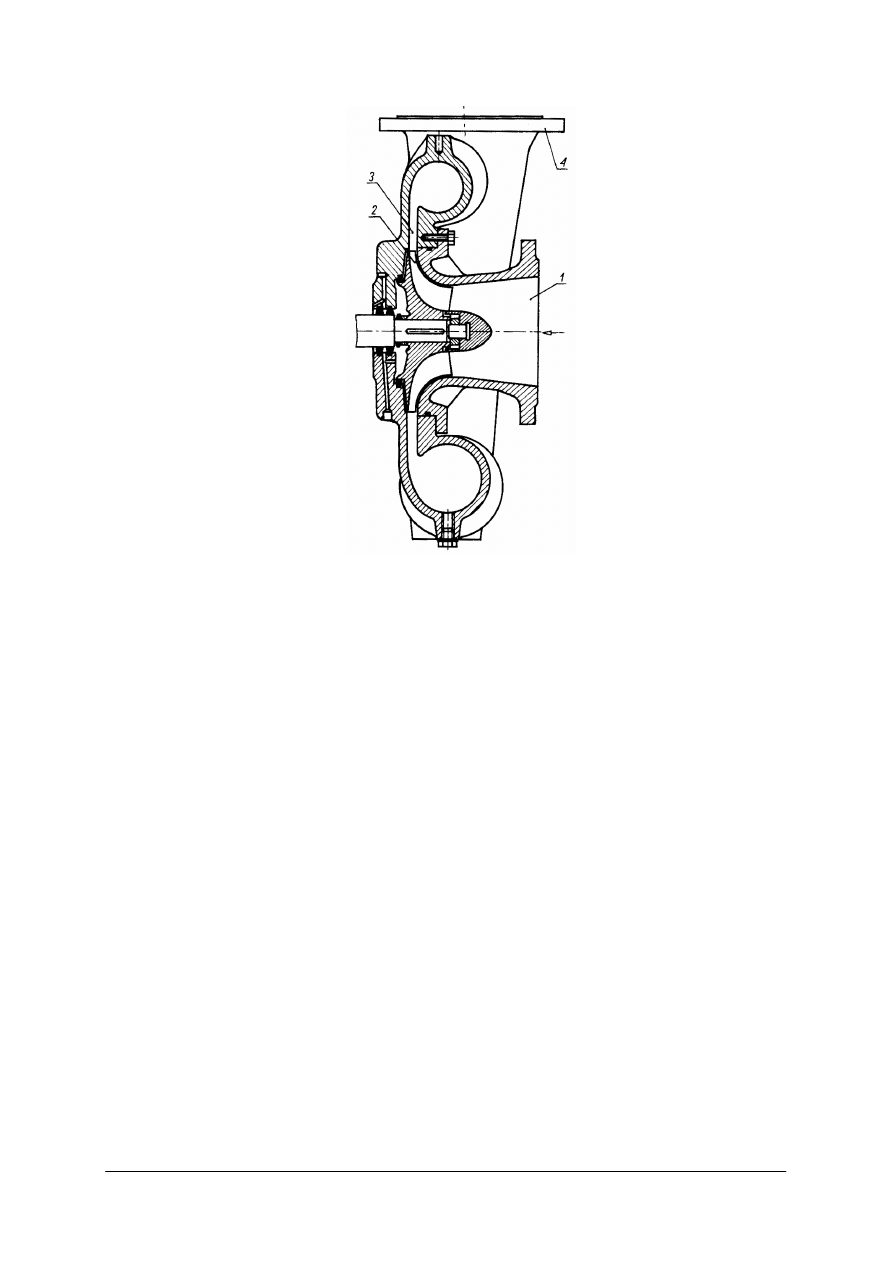
Wentylator to maszyna przepływowa służąca do transportowania powietrza lub innych
gazów. Przepływ odbywa się z pomieszczeń do otoczenia lub odwrotnie, oraz przez
urządzenia technologiczne, za pośrednictwem przewodów wentylacyjnych. Przekazywanie
energii do pokonania oporów przepływu odbywa się w wirniku, podstawowej części
składowej wentylatora. Źródłem napędu wentylatora jest silnik elektryczny. Napęd może być
realizowany jako bezpośredni, pasowy lub sprzęgłowy. Wirnik wentylatora musi pracować
w obudowie spiralnej lub rurowej, zakończonej króćcami na ssaniu i tłoczeniu. Energia
mechaniczna doprowadzona do wentylatora zamieniona zostaje na przyrost ciśnienia
statycznego i dynamicznego, potrzebny do pokonania przepływowych strat ciśnienia gazu
w urządzeniach i przewodach. Przyrost ciśnienia statycznego gazu w wentylatorach jest
minimalny (nie przekracza 13 kPa). Ze względu na cechy konstrukcyjne wentylatory dzielą się
na: osiowe i promieniowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Rys. 28. Budowa sprężarki promieniowej jednostopniowej [1, s.212]
Wentylatory osiowe dzieli się na:
−
ś
migłowe,
−
normalne,
−
przeciwbieżne.
Wentylatory promieniowe dzieli się na:
−
normalne,
−
bębnowe,
−
poprzeczne.
Podstawowymi parametrami technicznymi wentylatorów są:
−
wydajność [m
3
/s],
−
wytworzone ciśnienie (spiętrzenie całkowite) [Pa],
−
sprawność [%].
Napęd i sterowanie hydrauliczne.
W oparciu o prawo Pascala mówiące, że ciśnienie wywierane na ciecz znajdującą się
w spoczynku w zamkniętym naczyniu rozchodzi się we wszystkich kierunkach równomiernie,
jednakowo działając na każdą cząstkę cieczy budowane są układy napędu hydraulicznego.
Czynnikiem roboczym w napędach hydraulicznych są ciecze, najczęściej oleje mineralne
i roślinne oraz emulsje olejowo-wodne.
W składzie każdego układu hydraulicznego można wyróżnić:
−
pompę hydrauliczną,
−
urządzenia wykonawcze (siłowniki, silniki hydrauliczne),
−
zawory,
−
rozdzielacze,
−
urządzenia pomocnicze (przewody, filtry, zbiorniki).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Zalety stosowania napędu i sterowania hydraulicznego sprawiają, że nie ma takiego
rodzaju przemysłu, czy też dziedziny gospodarki narodowej, gdzie nie byłyby stosowane
układy hydrauliczne. Są one również stosowane do napędu i sterowania maszyn obuwniczych.
Pompy w napędach hydraulicznych wykorzystywane są do podniesienia ciśnienia cieczy,
dzięki czemu olej jako czynnik roboczy porusza różne elementy układów hydraulicznych.
Pompa otrzymuje energię mechaniczną od silnika napędowego i za pośrednictwem elementu
roboczego zamienia ją na energię cieczy. Działanie każdej pompy polega na wytwarzaniu
różnicy ciśnienia między ssawną i tłoczną stroną pompy. Spośród najczęściej stosowanych
pomp hydraulicznych należy wymienić pompy: zębate, śrubowe, łopatkowe i tłokowe.
Pompy zębate charakteryzują się niezawodnością działania oraz możliwością uzyskania
dużych ciśnień czynnika roboczego. Schemat pompy zębatej przedstawia rysunek 29.
Rys. 29. Schemat pompy zębatej [1, s.165]: 1 – koło napędzające, 2 – koło napędzane
Pompy zębate ze względu na swą zwartą konstrukcję znalazły zastosowanie w napędach
hydraulicznych i układach smarowania. Cechują się dużą równomiernością pracy oraz długim
okresem eksploatacji.
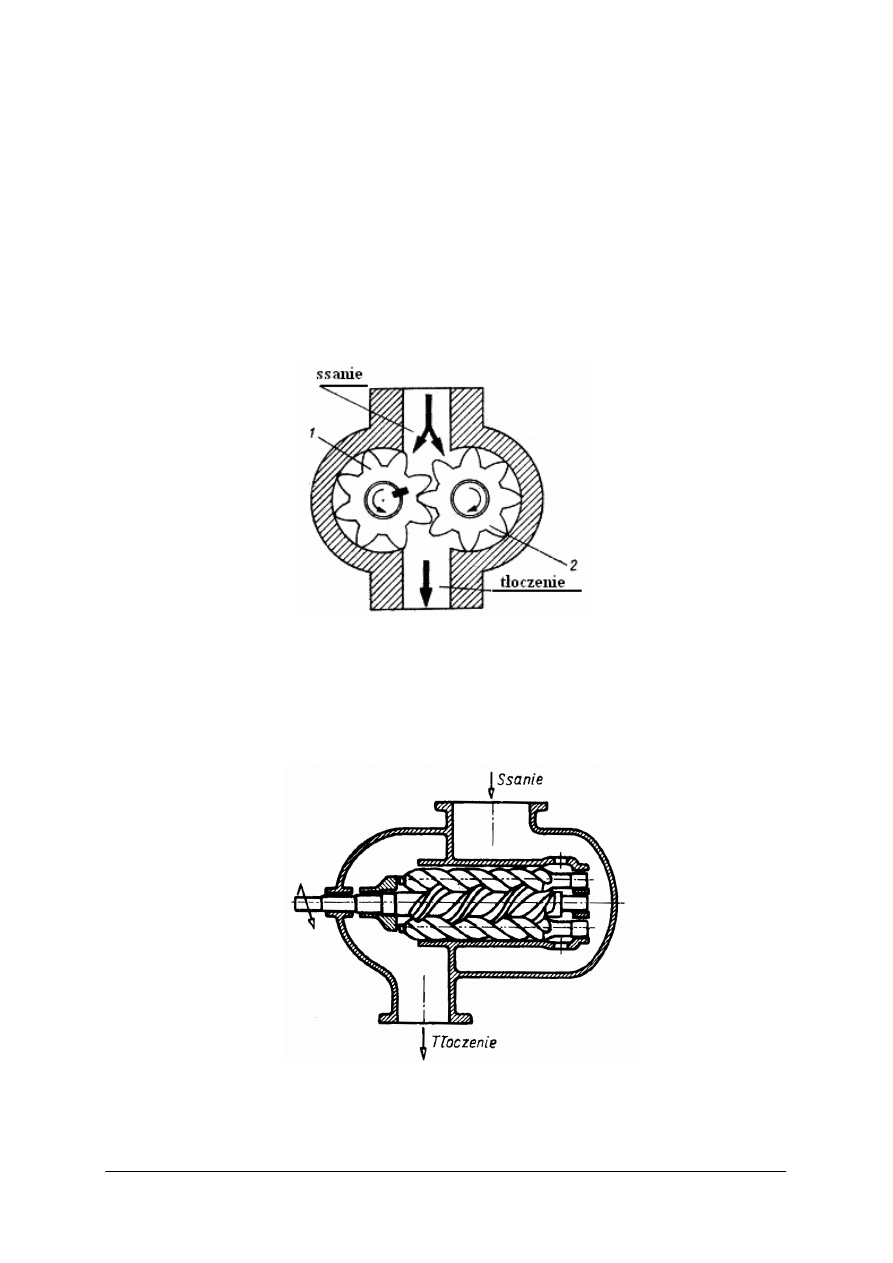
Pompy śrubowe zbudowane są podobnie do pomp zębatych, z tym że zamiast kół
zębatych zastosowane są dwa wirniki śrubowe wzajemnie się zazębiające rys. 30.
Rys. 30. Schemat pompy śrubowej [1, s.167]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Pompy te charakteryzują się duża wydajnością (do 0,2 m
3
/s) oraz ciśnieniem
uzyskiwanym na króćcu tłoczącym, nawet do 20 MPa, przy nieco mniejszej sprawności niż
pompy zębate.
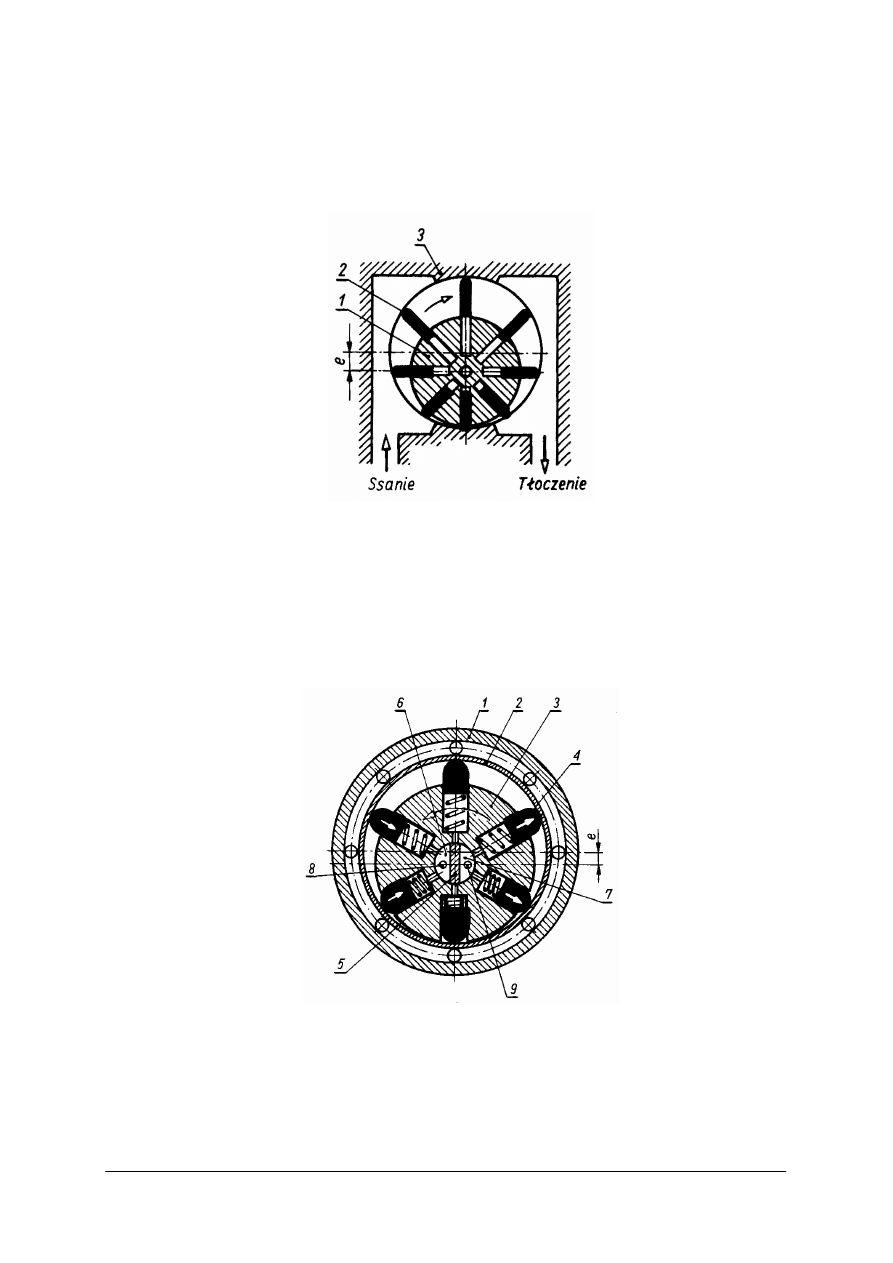
Pompy łopatkowe posiadają element roboczy w postaci wysuwnych (promieniowo lub
ukośnie) łopatek mimośrodowo przesuniętych względem osi korpusu rys. 31.
Rys. 31. Schemat pompy łopatkowej [1, s.167]: 1 – wirnik, 2 – łopatki, 3 – korpus, e - mimośrodowość
Pompy łopatkowe ze względu na swą delikatną konstrukcję stosowane są wyłącznie do
pompowania czystych i samosmarujących cieczy, dlatego znalazły zastosowanie w napędach
hydraulicznych obrabiarek. Ciśnienie robocze uzyskiwane za pomocą pomp łopatkowych
wynosi do 6 MPa przy wydajności 0,003 m
3
/s.
Pompy tłokowe budowane są jedno- lub wielotłokowe oraz jako jedno- i dwustronnego
działania. W układach hydraulicznych najczęściej stosuje się pompy tłokowe promieniowe
pokazane na rysunku 32.
Rys. 32. Schemat pompy tłokowej promieniowej [1, s.168]: 1 – obudowa, 2 – pierścień ruchomy,
3 – wirnik, 4 – tłoczki, 5 – przegroda, 6 – komora ssawna, 7 – komora tłoczna,
8 – kanał ssawny, 9 – kanał tłoczny
Ciśnienie wytwarzane przez pompy wynosi w zależności od typu nawet 60 MPa przy
wydajności od 0,007 do 0,02 m3/s.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1.
Jaka jest zasada działania napędów elektrycznych?
2.
Jaka jest budowa silnika prądu stałego i przemiennego?
3.
Jaki rodzaj czynnika jest wykorzystywany do napędu pneumatycznego?
4.
Jakie urządzenia stosowane są do sprężania gazów?
5.
Jakie urządzenia wykorzystywane są do transportu gazów?
6.
W oparciu o jakie prawo działają układy hydrauliczne?
7.
Do czego służą pompy w układach hydraulicznych?
8.
Jaki rodzaj czynnika służy do przekazywania energii w układach hydraulicznych?
4.3.3. Ćwiczenia
Ćwiczenie 1
Określ siłę wprawiająca w ruch wirnik silnika elektrycznego prądu stałego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować budowę i zasadę działania silnika prądu stałego,
2)
zamocować w statywie ramkę z nawiniętym cienkim drutem tak, aby mogła się łatwo
obracać,
3)
umieścić magnes stały tak, aby polem magnetyczne obejmowało ramkę z drutem,
4)
do dwóch końców drutu cewki podłączyć zaciski baterii 4,5V,
5)
obserwować zmianę położenia ramki z drutem,
6)
wyjaśnić przyczyny obrotu ramki z drutem oraz określić siłę odpowiedzialną za ten stan,
7)
zaprezentować wyniki z przeprowadzonego ćwiczenia.
Wyposażenie stanowiska pracy:
−
statyw,
−
ramka z nawiniętym drutem oporowym przymocowana do cienkiego sztywnego drutu,
−
wygięte z drutu haczyki do zawieszenia na statywie ramki z drutem,
−
bateria 4,5V,
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
Ćwiczenie 2
Zaprojektuj uproszczony schemat układu hydraulicznego do prasowania obuwia
w oparciu o schemat hydrauliczny prasy do obuwia.. Nazwij poszczególne części układu
hydraulicznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
przeanalizować schemat prasy hydraulicznej do obuwia,
2)
wypisać niezbędne elementy układu hydraulicznego prasy,
3)
ustalić kolejność przepływu oleju przez poszczególne podzespoły,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
4)
narysować schemat zaproponowanego układu hydraulicznego,
5)
sprawdzić poprawność wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
−
schemat układu hydraulicznego prasy do obuwia,
−
papier A 3,
−
przybory do rysowania,
−
poradnik mechanika (rozdziały poświęcone układom hydraulicznym),
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
Ćwiczenie 3
Wyszukaj nazwij i narysuj przekładnie przekazującą napęd z silnika na wał główny
maszyny szyjącej oraz z wału głównego na wał dolny maszyny.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1)
odszukać w materiale nauczania rodzaje przekładni mechanicznych,
2)
upewnić się że maszyna szyjąca płaska odłączona jest od zasilania a następnie zdjąć z niej
osłony i elementy maskujące,
3)
odszukać przekładnie mechaniczne wykorzystane do budowy maszyny,
4)
przerysować przekładnie do zeszytu przedmiotowego,
5)
nazwać przerysowane przekładnie,
6)
zaprezentować wyniki z przeprowadzonego ćwiczenia.
Wyposażenie stanowiska pracy:
−
model maszyny szyjącej płaskiej,
−
zestaw narzędzi do demontażu osłon maszyny,
−
zeszyt przedmiotowy,
−
długopis, ołówek, gumka,
−
poradnik dla ucznia,
−
literatura z rozdziału 6.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
zdefiniować pojęcia pola elektromagnetycznego?
2)
zdefiniować rodzaj oddziaływań w maszynach elektrycznych?
3)
określić sposób dostarczania energii do urządzeń pneumatycznych?
4)
scharakteryzować krótko kilka typów sprężarek?
5)
określić przeznaczenie wentylatorów?
6)
wymienić podstawowe podzespoły układów hydraulicznych?
7)
scharakteryzować typowe pompy hydrauliczne?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
5.
SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1.
Przeczytaj uważnie instrukcję.
2.
Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3.
Zapoznaj się z zestawem zadań testowych.
4.
Test zawiera 20 zadań o różnym stopniu trudności. Są to zadania wielokrotnego wyboru.
5.
Za każdą poprawną odpowiedź możesz uzyskać 1 punkt.
6.
Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi. Dla każdego zadania podane
są cztery możliwe odpowiedzi: a, b, c, d. Tylko jedna odpowiedź jest poprawna; wybierz
ją i zaznacz kratkę z odpowiadającą jej literą znakiem X.
7.
Staraj się wyraźnie zaznaczać odpowiedzi. Jeżeli się pomylisz i błędnie zaznaczysz
odpowiedź, otocz ją kółkiem i zaznacz ponownie odpowiedź, którą uważasz za
poprawną.
8.
Test składa się z 14 zadań z poziomu podstawowego i 6 zadań z poziomu
ponadpodstawowego i które mogą przysporzyć Ci trudności, gdyż są one na poziomie
wyższym niż pozostałe (dotyczy to zadań o numerach od 15 do 20).
9.
Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
10.
Kiedy udzielenie odpowiedzi będzie sprawiało Ci trudność, wtedy odłóż rozwiązanie
zadania na później i wróć do niego, gdy zostanie Ci czas wolny.
11.
Po rozwiązaniu testu sprawdź czy zaznaczyłeś wszystkie odpowiedzi na KARCIE
ODPOWIEDZI.
12.
Na rozwiązanie testu masz 45 minut.
Powodzenia!
Materiały dla ucznia:
−−−−
instrukcja,
−−−−
zestaw zadań testowych,
−−−−
karta odpowiedzi.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
ZESTAW ZADAŃ TESTOWYCH
1.
Który z wymienionych działów nie zalicza się do mechaniki
a)
statyka.
b)
wytrzymałość.
c)
kinetyka.
d)
dynamika.
2.
Moment siły posiada wartość
a)
zawsze dodatnią.
b)
zawsze ujemną.
c)
dodatnią lub ujemną.
d)
zrównoważoną.
3.
Aby spełnić warunki równowagi dowolnego płaskiego układu należy ułożyć równania
w ilości
a)
2.
b)
3.
c)
4.
d)
5.
4.
Określanie wytrzymałości materiałów konstrukcyjnych odbywa się w oparciu o badanie na
a)
zrywarce.
b)
zgniatarce.
c)
prasie śrubowej.
d)
podnośniku śrubowym.
5.
Oznaczenie schematyczne przedstawia obciążenie części maszyn z warunku na
a)
rozciąganie.
b)
ś
ciskanie.
c)
zginanie.
d)
ś
cinanie.
6.
Jednostką mocy jest
a)
niuton [N].
b)
dżul [J].
c)
wat [W].
d)
megapaskal [MPa].
7.
Sprawność maszyn jest zawsze
a)
mniejsza od jedności.
b)
większa od jedności.
c)
równa jeden.
d)
równa sto.
8.
Przekładnia mechaniczna z psem klinowym zaliczana jest do przekładni
a)
cięgnowych.
b)
ciernych.
c)
zębatych.
d)
ś
limakowych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
9.
Mechanizm śrubowy służy do zamiany ruch obrotowego na ruch
a)
wahadłowy.
b)
posuwisto-zwrotny.
c)
przerywany.
d)
postępowy.
10.
Tolerancja jest liczbą
a)
tylko dodatnią.
b)
dodatnią lub ujemną.
c)
pierwszą.
d)
ujemną.
11.
Ś
rednia wartość pięciu najwyżej położonych punktów zarysu do pięciu punktów
położonych najniżej na odcinku elementarnym mierzonym od linii odniesienia to
parametr chropowatości
a)
R
a
.
b)
R
z
.
c)
P
a
.
d)
P
z
.
12.
Wydajność rzeczywista w stosunku do wydajności teoretycznej jest
a)
większa.
b)
równa.
c)
mniejsza.
d)
równa zero.
13.
Które z wymienionych połączeń zaliczamy do połączeń rozłącznych?
a)
Ś
rubowe.
b)
Nitowe.
c)
Zgrzewane.
d)
Spawane
14.
Wały podczas pracy narażone są na
a)
ś
cinanie.
b)
ś
ciskanie.
c)
rozciąganie.
d)
skręcanie i zginanie.
15.
Zamiana energii elektrycznej na energię mechaniczną odbywa się w silniku
a)
odrzutowym.
b)
parowym.
c)
spalinowy.
d)
elektrycznym.
16.
Czynnikiem przenoszącym energię w siłowniku pneumatycznym jest
a)
gaz spalinowy.
b)
gaz ziemny.
c)
gaz techniczny (propan-butan).
d)
gaz sprężony.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
17.
Prawem wykorzystywanym w układach hydraulicznych jest prawo
a)
Ohma.
b)
Pitagorasa.
c)
Pascala.
d)
Talesa.
18.
Sprężarki wykorzystywane są do
a)
wstępnego napinania sprężyn.
b)
wywierania napięcia wstępnego w połączeniach śrubowych szczelnych.
c)
zwiększania ciśnienia gazów.
d)
zwiększania ciśnienia cieczy.
19.
Który z wymienionych elementów nie wchodzi w skład układu pneumatycznego
a)
pompa.
b)
sprężarka.
c)
siłownik
d)
rozdzielacz.
20.
Łożyska współpracują z
a)
połączeniami śrubowymi.
b)
połączeniami spawanymi.
c)
osiami i wałami.
d)
połączeniami nitowymi.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Charakteryzowanie części, mechanizmów, maszyn i urządzeń obuwniczych.
Zakreśl poprawną odpowiedź
.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
6.
LITERATURA
1.
Bożenko L.: Maszynoznawstwo. WSiP, Warszawa 1993
2.
Charasz A., Glinka F., Maleńczak J.: Maszyny obuwnicze. WSI w Radomiu, Radom
1982
3.
Charasz A., Łuczyńska J., Matuszewski S., Suwart R., Olszewski A.: Oprzyrządowanie
do produkcji obuwia. WSI w Radomiu, Radom 1985
4.
Malik B.: Podstawy konstrukcji maszyn (zbiór zadań). Wydawnictwo Szkolne PWN,
Warszawa – Łódź 2000
5.
Pala S.: Maszyny i urządzenia obuwnicze. WSiP, Warszawa 1973
6.
Puff T., Sołtys W.: Podstawy technologii montażu maszyn i urządzeń. WNT, Warszawa
1980
7.
Rutkowski A., Stępień A.: Zbiór zadań z części maszyn. WSiP, Warszawa 199
8.
Siuta W.: Mechanika Techniczna. PWSZ, Warszawa 1971
9.
Ilustrowany Leksykon Techniczny. WN-T, Warszawa 1994
10.
www.wikipedia.pl
11.
www.agh.edu.pl
Czasopisma:
–
Mechanik
–
Przegląd Mechaniczny
Wyszukiwarka
Podobne podstrony:
obuwnik 744[02] z2 01 n
obuwnik 744[02] z2 01 n
obuwnik 744[02] o1 01 u
obuwnik 744[02] o1 01 n
obuwnik 744[02] z5 01 n
obuwnik 744[02] z2 03 n
obuwnik 744[02] o2 01 n
obuwnik 744[02] z2 02 n
obuwnik 744[02] z2 03 u
obuwnik 744[02] z1 01 n
obuwnik 744[02] z2 04 u
obuwnik 744[02] z4 01 u
obuwnik 744[02] z3 01 n
obuwnik 744[02] o2 01 u
obuwnik 744[02] z4 01 n
obuwnik 744[02] z2 04 n
obuwnik 744[02] z2 02 u
obuwnik 744[02] z5 01 u
obuwnik 744[02] z1 01 u
więcej podobnych podstron