J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 1
Pękanie – zastosowanie funkcji Airy
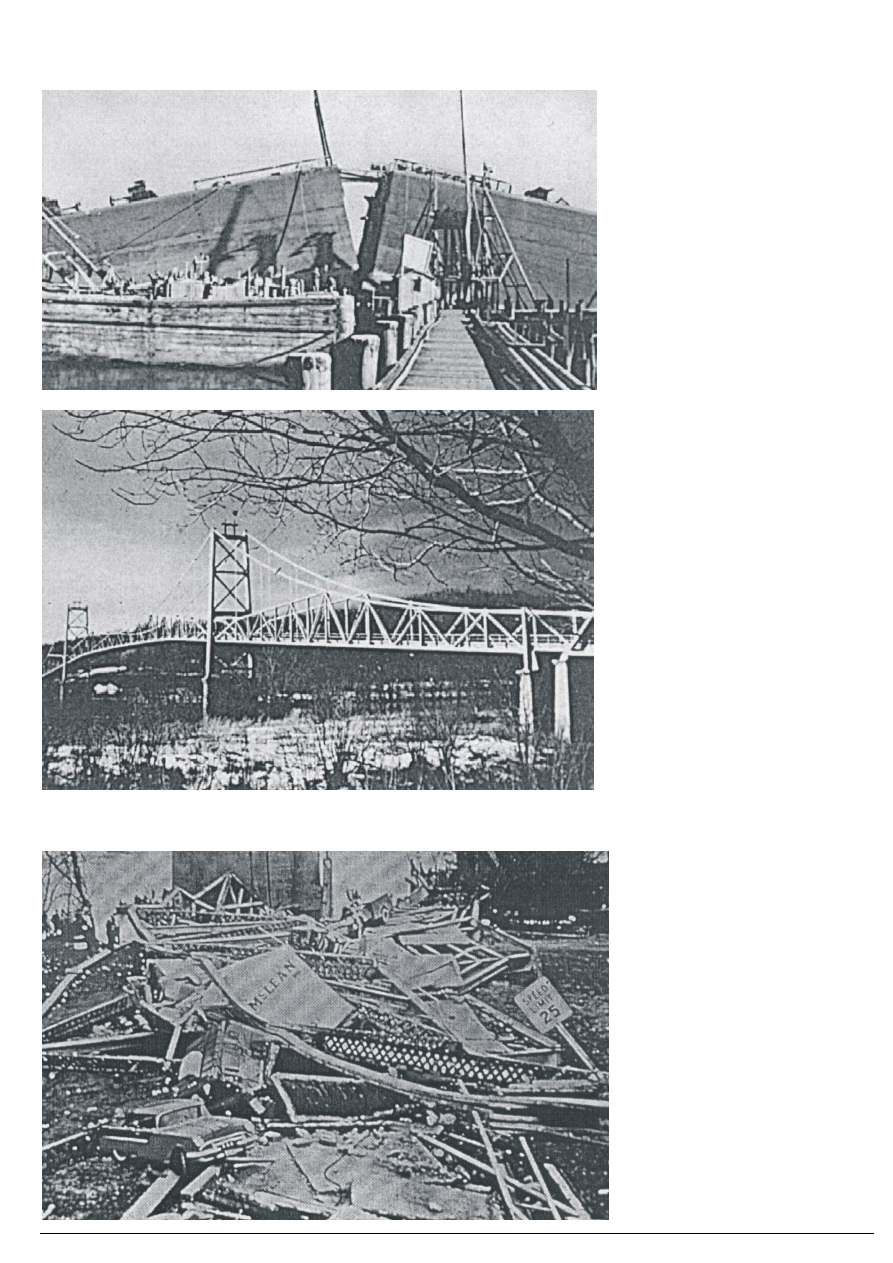
Historia (przykłady):
Statki „Liberty” wybudowane w okresie 2. Wojny Światowej. Z 5000 jednostek zniszczeniu uległo 1/5.
Point Pleasant Bridge West Virginia, 1967.
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 2
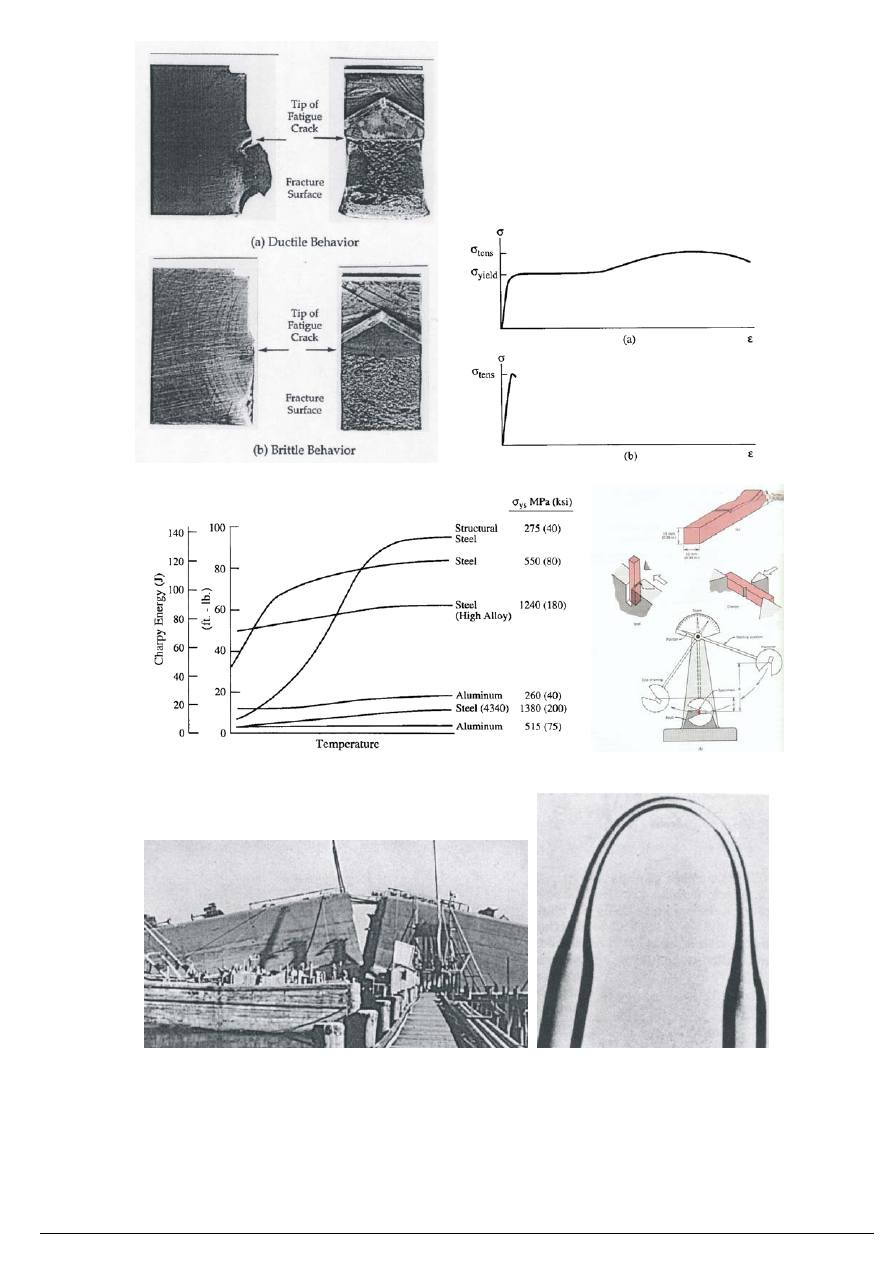
Materiał plastyczny i kruchy – rozciąganie i udarność
Wpływ temperatury na energię pękania
Zwykła stal Szkło
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 3
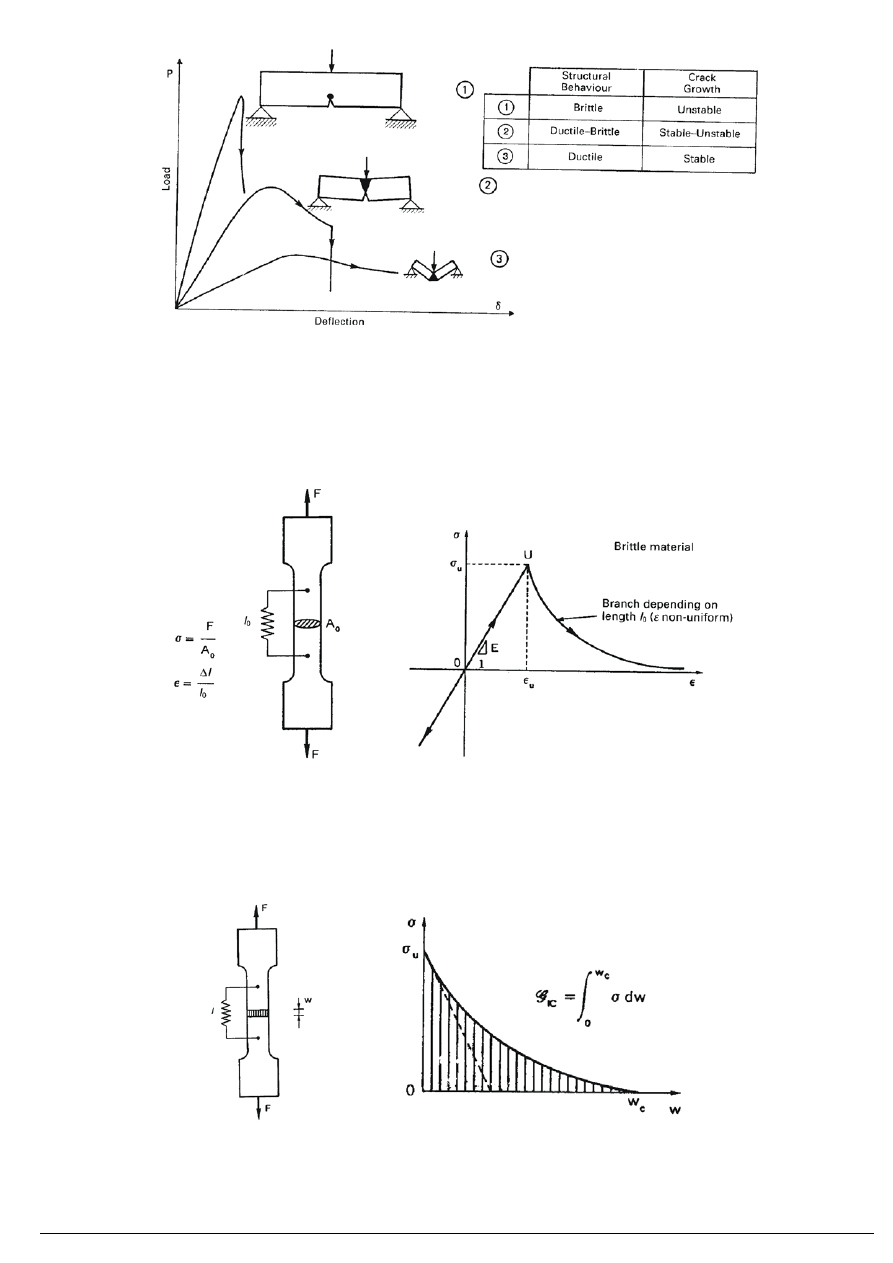
Efekt skali:
1 – Zachowanie kruche
2 – Zachowanie plastyczno – kruche
3 – plastyczne
Rozciąganie – materiał kruchy – osłabienie
Energia pękania – wielkość obiektywna
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 4
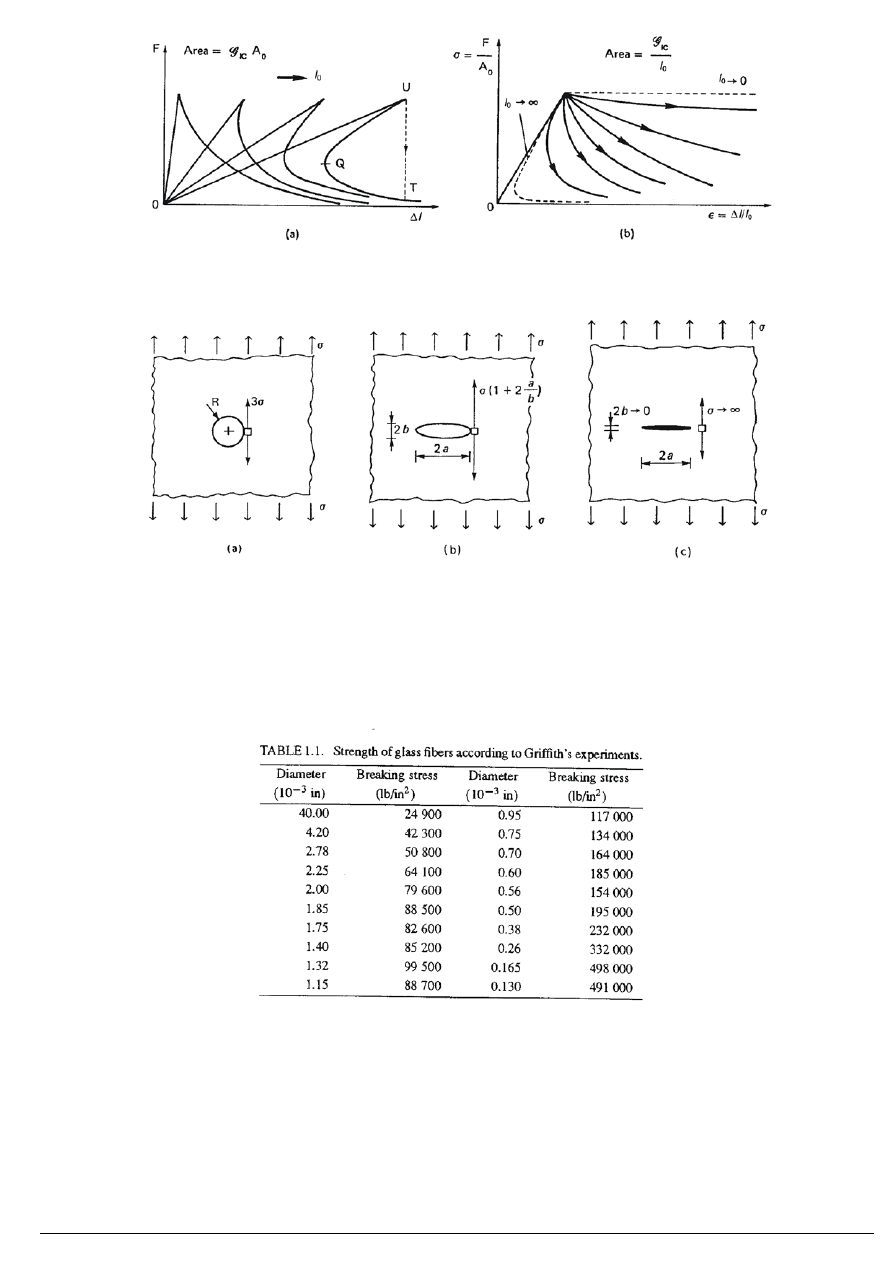
Mechanika pękania
–
rozwój (propagacja) istniejącej rysy
Kirsch (1898) Inglis (1913)
Griffith, A.A. (1921) ‘The phenomena of rupture and flow in solids’, Philosophical Transactions oft/se Royal
Society of London A221, 163 – 198
“If the strength of this glass, as ordinarily interpreted, is not constant, on what does it depend? What is the greatest
possible strength, and can this strength be made for technical purposes by appropriate treatment of the material?”
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 5
2
2
e
W
a
E
σ
π
=
4
s
W
a
γ
=
e
s
dW
dW
da
da
≥
2
2
4
a
E
σ
π
γ
≥
2 E
a
γ
σ
π
≥
2 E
a
γ
σ
π
≥
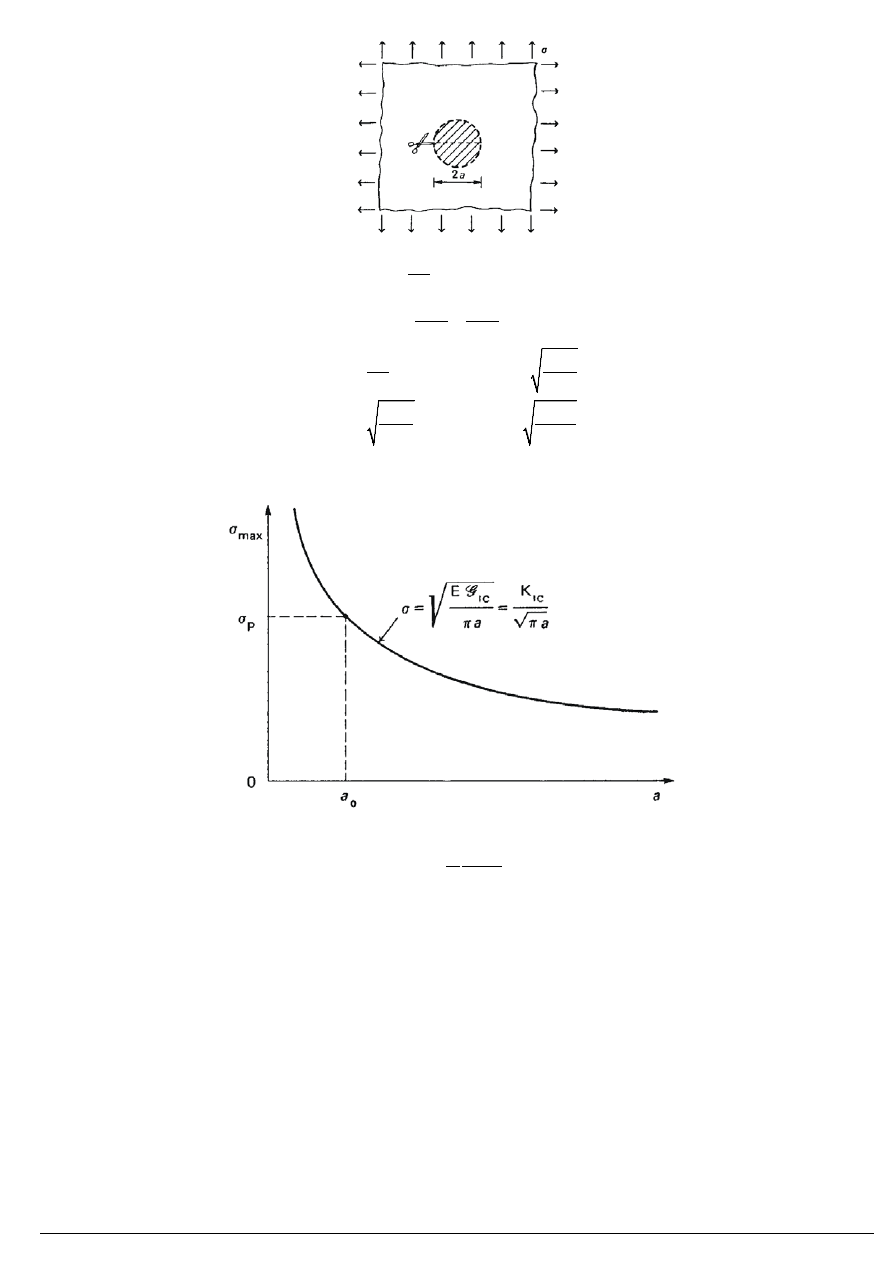
IC
E
a
σ
π
≥ G
0
2
1
IC
p
E
a
π σ
= G
Pękanie – rozwój istniejącej rysy
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 6
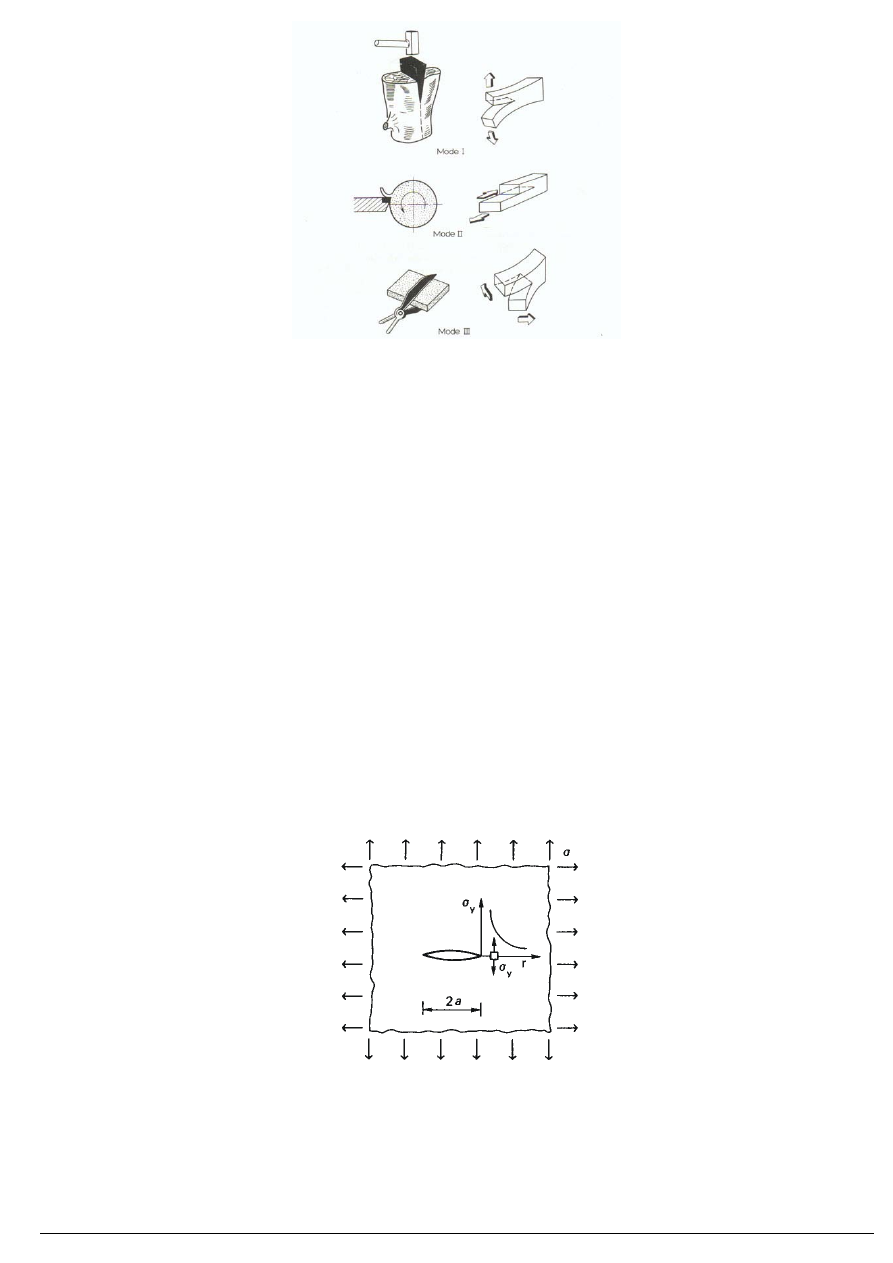
Rodzaje rys:
I typ otwarcia (opening mode)
II typ
ścinania (sliding mode)
III typ rozrywania (tearing mode)
Pojęcia:
–
wytrzymałość materiału,
–
plastyczność,
–
kruchość,
– energia
pękania.
Czy plastyczność może być własnością materiału skoro zależy od wymiarów próbki ?
Zasadnicze pytania mechaniki pękania
•
Jaka jest nośność konstrukcji po ujawnieniu rysy danej wielkości?
•
Jaka maksymalna wielkość rysy jest dopuszczalna poddanym obciążeniem?
• Jaka liczba cykli jest konieczna do wzrostu rysy od
wielkości początkowej (np. minimalnej wykrywalnej) do
wielkości końcowej (krytycznej)?
•
Jaki jest maksymalny dopuszczalny przedział czasowy pomiędzy inspekcjami zapewniający, że maksymalna nie
wykryta rysa nie wzrośnie do wartości krytycznej?
Wzory mechaniki pękania
Westergaard (1939)
Muskhelishvili (1933)
Metoda Westergaarda (1939)
Funkcja Airy
1
2
3
U
xU
yU
Φ =
+
+
Musi spełniać równanie
4
0
∇ Φ =
Poszczególne składniki:
Dla kolejnych składników:
(
)
( )
4
2
2
2
1
1
0
0
U
U
∇
= ∇ ∇
= ∇
=
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 7
(
)
(
)
2
2
2
2
2
2
2
xU
xU
x
y
∂
∂
∇
=
+
∂
∂
(
)
(
)
2
2
2
2
2
2
2
2
2
2
2
U
U
U
xU
xU
U
x
x
x
x
x
x
x
x
x
∂
∂ ∂
∂
∂
∂
∂
=
=
+
=
+
∂
∂ ∂
∂
∂
∂
∂
(
)
2
2
2
2
2
2
U
xU
x
y
y
∂
∂
=
∂
∂
(
)
2
2
2
2
2
2
2
U
xU
x
U
x
∂
∇
=
+ ∇
∂
Funkcja
2
U jest fun
kcją harmoniczną, a więc
(
)
2
2
2
2
2
U
xU
x
∂
∇
=
∂
Wykorzystując operator Laplaca:
(
)
(
)
2
2
2
2
2
2
2
2
0
U
xU
U
x
x
∂
∂
∇
= ∇
=
∇
=
∂
∂
W podobny sposób można wykazać, że
(
)
4
3
0
yU
∇
=
Wprowadzamy fun
kcję
( )
Z z
o następujących własnościach
(oryginalne oznaczenia Westergaarda)
,
,
dZ
dZ
dZ
Z
Z
Z
dz
dz
dz
′
=
=
=
dZ
dZ z
Z
dx
dz
x
∂
=
=
∂
Na tej podstawie definiujemy odpowiednio
części rzeczywiste
i urojone funkcji
dZ
dZ z
iZ
dy
dz
y
∂
=
=
∂
Re
Re
Re
Z
Z
Z
dx
x
∂
∂
=
=
∂
Re
Re
Im
Z
Z
Z
dy
y
∂
∂
=
= −
∂
Im
Im
Im
Z
Z
Z
dx
x
∂
∂
=
=
∂
Im
Im
Re
Z
Z
Z
dy
y
∂
∂
=
=
∂
Ostatecznie zdefinujemy
następującą funcję Airy (pierwsza hipoteza Westergaarda):
(
)
2
2
1
Re
Im
2
I
I
I
Z
y
Z
B y
x
Φ =
+
+
−
Oznaczenie I –
rozwiązanie jest symetryczne względem osi x, wszystkie składniki są hormoniczne
Kolejno wyznaczymy:
Re
Im
I
I
I
Z
y
Z
Bx
x
∂Φ
=
+
−
∂
Re
I
I
y
Z
By
y
∂Φ
=
+
∂
Wtedy n
aprężenia:
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 8
2
Re
Im
I
x
I
I
Z
y
Z
B
y
σ
∂ Φ
′
=
=
−
+
∂
2
2
Re
Im
I
y
I
I
Z
y
Z
B
x
σ
∂ Φ
′
=
=
+
−
∂
2
Re
I
xy
I
y
Z
x y
τ
∂ Φ
′
= −
= −
∂ ∂
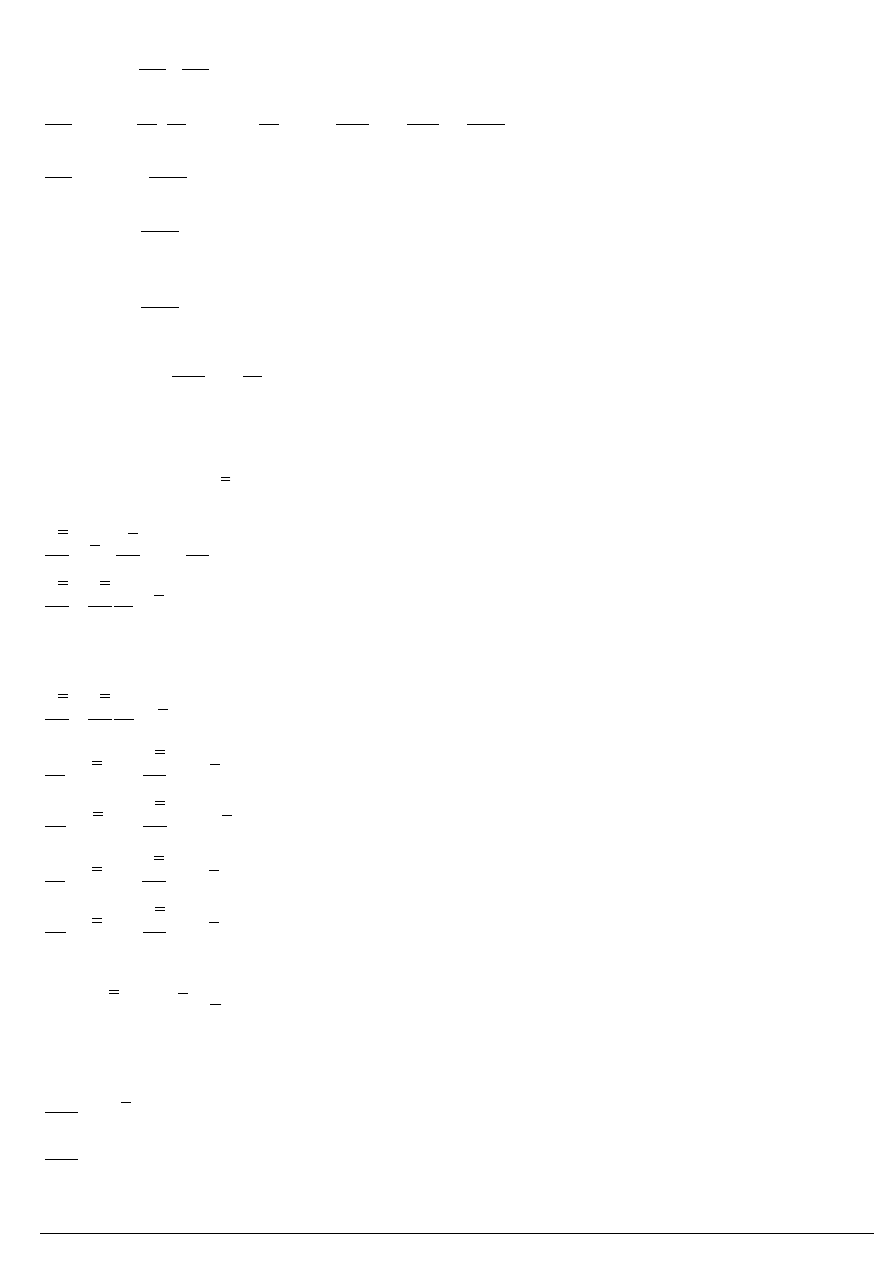
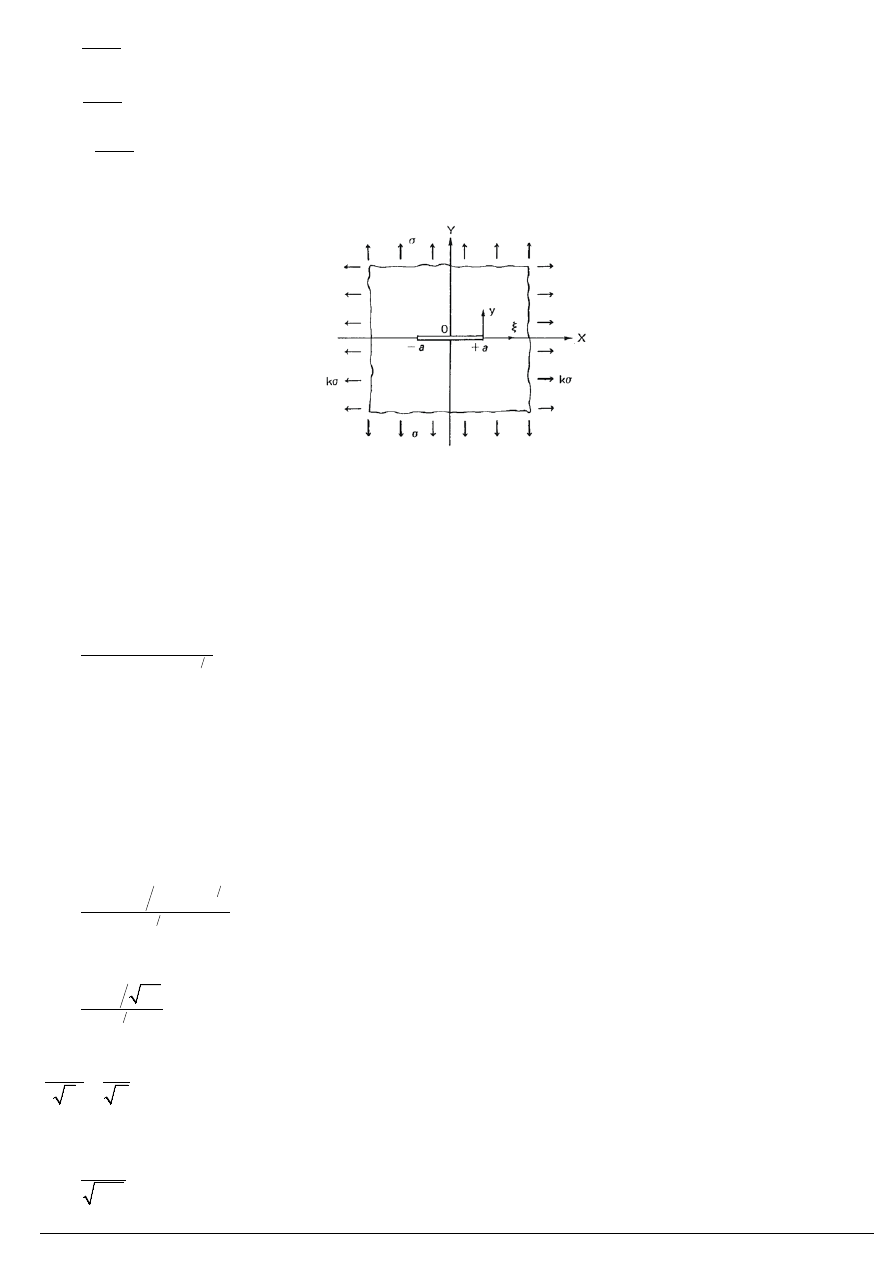
Przypadek szczególny:
Warunki brzegowe:
( )
( )
,0
,0
0
for
y
xy
x
x
a
x
a
σ
τ
=
=
− < <
Przyjmujemy nast
ępującą postać funkcji (druga hipoteza Westergaarda):
( )
(
)(
)
1 2
,
I
g z
Z
B
z
z
a
z
a
=
+
∀ ∈
+
−
C
Na narożach nacięcia będziemy mieli:
( )
,0
2
for
x
x
B
a
x
a
σ
=
− < <
Wprowadzamy zmienną
z
a
ς
= +
i otrzymamy
(
) (
)
1 2
1 2
2
I
g
a
a
Z
B
ς
ς
ς
+
+
=
+
W otoczeniu wierzchołka nacięcia możemy przyjąć:
( )
1 2
2
I
g a
a
Z
B
ς
=
+
Wprowadzając oznaczenie
( )
I
g a
K
a
π
=
I
K stress-intensity factor –
współczynnik intensywności naprężeń
Otrzymamy
2
I
I
K
Z
B
πς
=
+
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 9
Wprowadzamy układ biegunowy:
(
)
cos
sin
i
re
r
i
ϑ
ς
ϑ
ϑ
=
=
+
1
1
1
1
2
2
2
2
cos
sin
2
2
i
r e
r
i
ϑ
ϑ
ϑ
ς
−
−
−
−
=
=
−
3
3
3
3
2
2
2
2
3
3
cos
sin
2
2
i
r e
r
i
ϑ
ς
ϑ
ϑ
−
−
−
−
=
=
−
sin
2 sin
cos
2
2
y
r
r
ϑ
ϑ
ϑ
=
=
otrzymamy
cos
sin
2
2
2
I
I
K
Z
i
B
r
ϑ
ϑ
π
=
+
+
3
2
3 2
1
3
3
cos
sin
2
2
2
2
2
I
I
I
K
K
Z
i
r
ς
ϑ
ϑ
π
π
−
′ =
−
=
−
Naprężenia:
( )
3 2
3
cos
2 sin
cos
sin
2
2
2
2
2
2
2 2
I
I
x
K
K
r
B
r
r
ϑ
ϑ
ϑ
σ
ϑ
π
π
=
−
+
( )
3 2
3
cos
2 sin
cos
sin
2
2
2
2
2
2 2
I
I
y
K
K
r
r
r
ϑ
ϑ
ϑ
σ
ϑ
π
π
=
+
3 2
3
2 sin
cos
cos
2
2
2
2 2
I
xy
K
r
r
ϑ
ϑ
τ
ϑ
π
= −
−
Porządkując składniki:
3
cos
1 sin
sin
2
2
2
2
2
I
x
K
B
r
ϑ
ϑ
σ
ϑ
π
=
−
+
3
cos
1 sin
sin
2
2
2
2
I
y
K
r
ϑ
ϑ
σ
ϑ
π
=
+
3
sin
cos
cos
2
2
2
2
I
xy
K
r
ϑ
ϑ
τ
ϑ
π
=
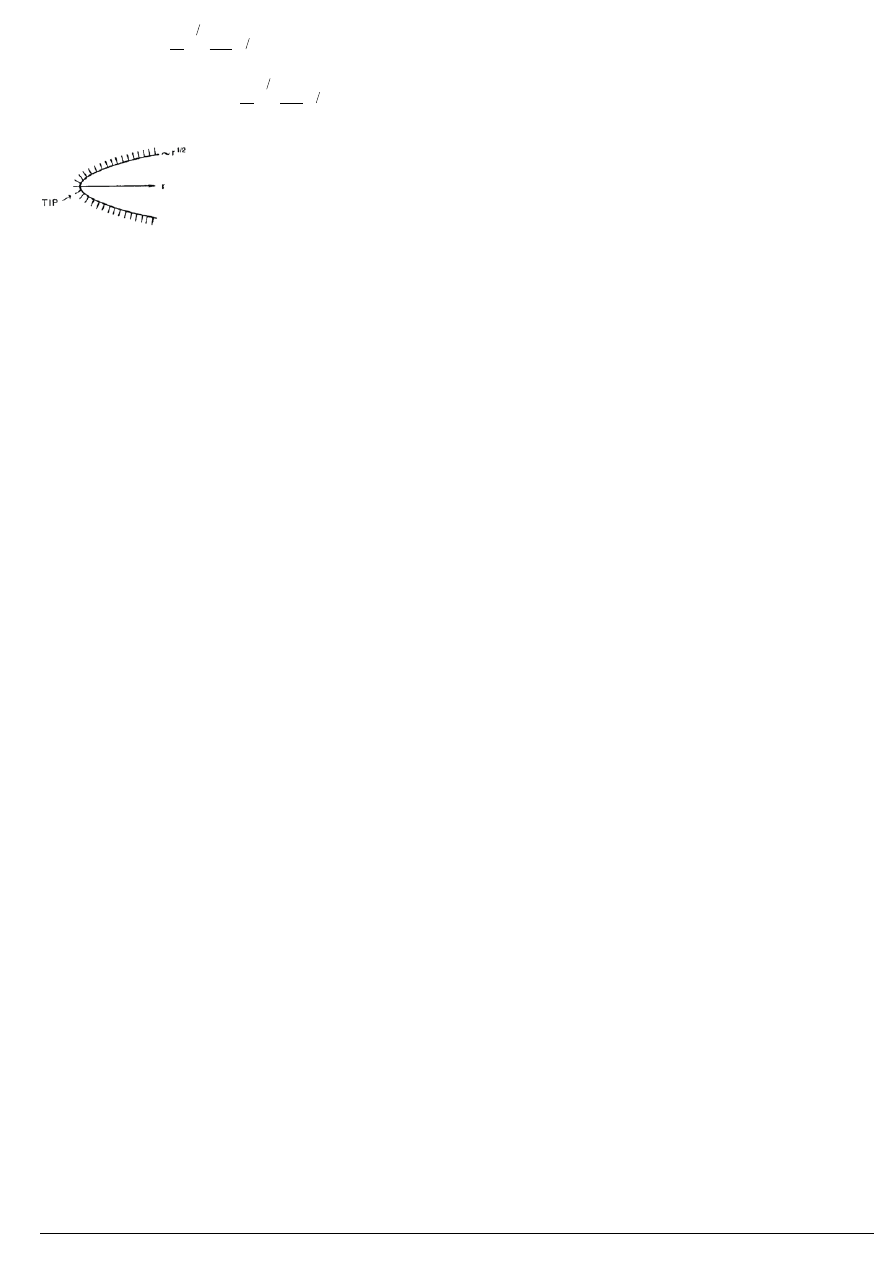
Wnioski:
•
r
w mianowniku oznacza nienoszone naprężenia w wierzchołku rysy bez względu na warunki
brzegowe,
•
Przebieg naprężeń zależy jedynie od kształtu rysy, a nie warunków naprężeń na brzegach (w
nieskończoności),
•
Naprężenia w otoczeniu rysy zależą jedynie od współczynnika intensywności naprężeń
I
K , który
zależy wyłącznie od warunków naprężeń na brzegach,
•
Jednostką współczynnika intensywności jest
3/2
[ ][ ]
F L
−
Współczynnik intensywności naprężeń decyduje o efekcie skali zarówno w przypadku pękania jak i klasycznych
warunków
wytrzymałościowych.
Okre
ślenie współczynnika intensywności naprężeń.
Trzecia hipoteza Westergaarda: funkcja
( )
g z
zależy od warunków naprężenia w niskończoności,
W naszym przypadku
( )
g z
z
σ
=
(
)(
)
1 2
,
I
z
Z
B
z
z
a
z
a
σ
=
+
∀ ∈
+
−
C
lim
2
x
z
B
σ
σ
→∞
= +
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 10
lim
y
z
σ
σ
→∞
=
lim
0
xy
z
τ
→∞
=
(
)
1 / 2
B
k
σ
=
−
Ostatecznie otrzymamy:
I
K
a
σ π
=
Współczynnik zależy od naprężeń w nieskończoności prostopadłych do pęknięcia w połowie długości pęknięcia.
Wprowadzając
( )
(
)
,0
1
for
x
x
k
a
x
a
σ
σ
=
−
− < <
Uzyskamy bardziej ogólną postać współczynnika:
1 2
sec
2
I
a
K
a
h
π
σ π
=
Informacje o warukach brzegowych wystepują wyłącznie we współczynniku intensywności naprężenia.
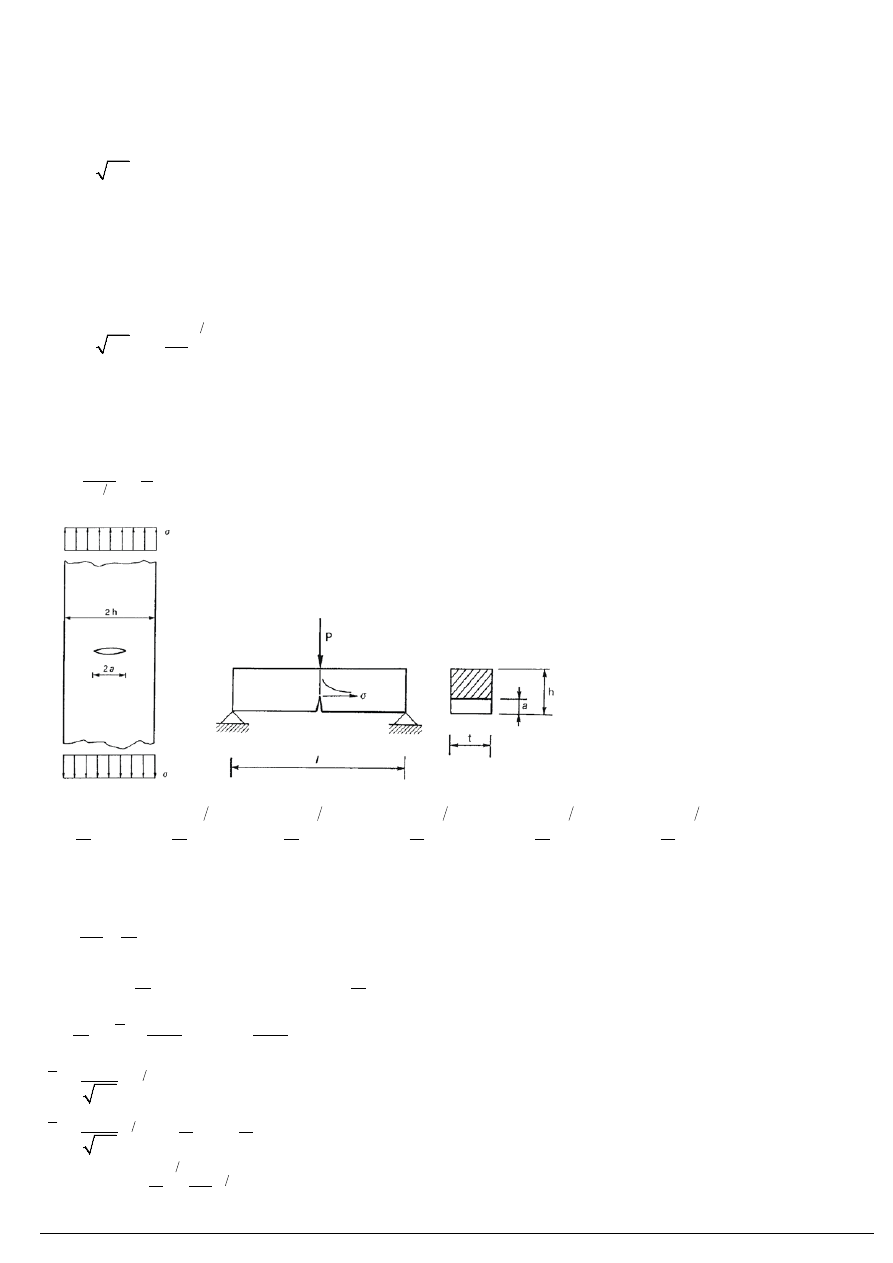
Pr
zykładowo dla rozciąganego pręta:
3 2
I
Pl
a
K
f
th
h
=
A dla belki z nacieciem:
1 2
3 2
5 2
7 2
9 2
2.9
4.6
21.8
37.6
38.7
a
a
a
a
a
a
f
h
h
h
h
h
h
=
−
+
−
+
Crack opening displacement COD (szerokość rozwarcia rysy)
(
)
1
y
y
x
y
E
υ
ε
σ
νσ
∂
=
=
−
∂
(
)
(
)
1
Re
Im
Re
Im
y
I
I
I
I
dy
Z
y
Z
B dy
Z
y
Z
B dy
E
E
ν
υ
ε
′
′
=
=
+
−
−
−
+
∫
∫
∫
2
1
1
Im
Re
I
I
Z
y
Z
By
E
E
E
ν
ν
υ
+
+
=
−
−
1 2
2
2
I
I
K
Z
B
C
ς
ς
π
=
+
+
(
)
1 2
2
cos
sin
cos
sin
2
2
2
I
I
K
Z
r
i
Br
i
C
ϑ
ϑ
ϑ
ϑ
π
=
+
+
+
+
(
)
1 2
1 2
2
2
I
K
r
E
υ ϑ π
π
=
=
J. Górski, M. Skowronek, M. Gołota, K. Winkelmann • WILiŚ PG • Teoria sprężystości i plastyczności • Wykład 08 • 11
(
)
1 2
1 2
2
2
I
K
r
E
υ ϑ
π
π
= −
= −
( ) ( )
1 2
1 2
2
COD
4
I
K
r
E
υ π
υ π
π
=
−
−
=
Rozwarcie rysy jest proporcjonalne do obciążenia i warunków brzegowych, a odwrotnie proporcjonalne do
współczynnika E.
Na brzegu rysy jest równe zero.
Document Outline
Wyszukiwarka
Podobne podstrony:
26) TSiP Wyklad 08 pekanie
32) TSiP Wyklad 08 plastycznosc
27) TSiP Wyklad 10 pekanie plastycznosc
Neurologia wykład VIII 23 kwietnia 08, fizjoterapia, notatki, neurologia
Neurologia wykład III 5 marca 08, fizjoterapia, notatki, neurologia
Wykład 08.10.2010 (piątek) dr. E. Suliga, UJK.Fizjoterapia, - Notatki - Rok I -, Rozwój Biologiczny
Neurologia wykład IV 12 marca 08, fizjoterapia, notatki, neurologia
Neurologia wykład V 26 marca 08, fizjoterapia, notatki, neurologia
wykład 3-08.03.2011, Notatki UTP - Zarządzanie, Semestr II, Nauka o organizacji
Neurologia wykład VI 2 kwietnia 08, fizjoterapia, notatki, neurologia
Neurologia wykład VII 9 kwietnia 08, fizjoterapia, notatki, neurologia
Wykład 4 - 08.04.2011, Notatki UTP - Zarządzanie, Semestr II, Zarządzanie jakością
Neurologia wykład II 20 luty 08, fizjoterapia, notatki, neurologia
wykład 08 - pedagogika behawioralna - Winfired Wermter - Dom Mi, współczesne kierunki pedagogiczne
Wykład 4 ewolucja, EWOLUCJA, notatki wykład
MT I Wyklad 08
więcej podobnych podstron