
MECHANIKA
UKŁADÓW WIELOCZŁONOWYCH
Prowadzący: dr inż. Paweł Ostapkowicz
WM-324
Wykład 3
Temat:
Mechanizmy dźwigniowe płaskie i ich przekształcenia.
Mechanizmy krzywkowe
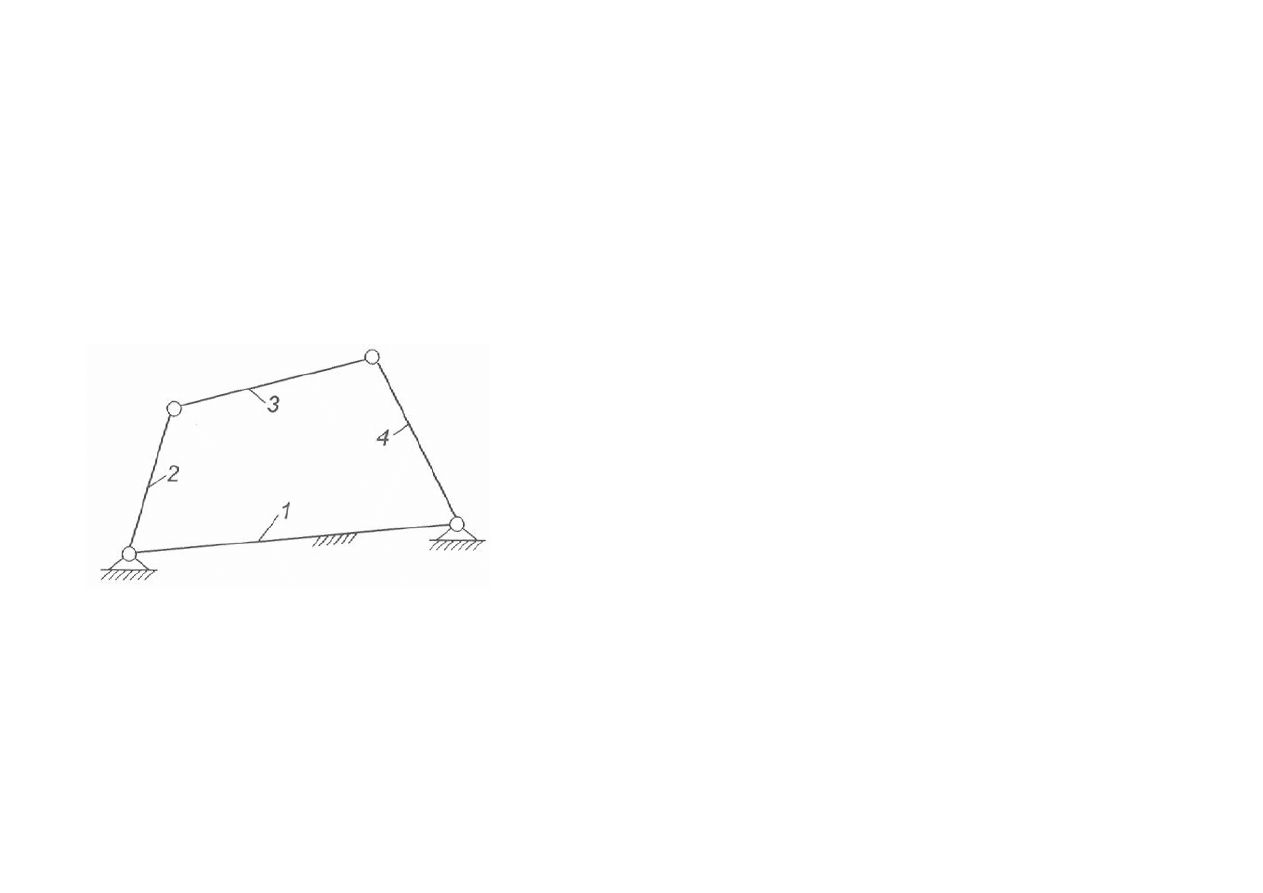
1. Czworobok przegubowy
Podstawowym mechanizmem dźwigniowym płaskim
jest czworobok przegubowy.
Są to cztery człony połączone parami obrotowymi.
Liczba członów ruchomych względem podstawy
n=3, par V klasy p
5
=4, stąd ruchliwość czworoboku
wynosi w=3
·
3-2
·
4=1.
Człon 1 nazywa się podstawą, człon 3 - łącznikiem, człony 2 i 4 to ramiona. Ramię, które
może wykonywać pełny obrót, nazywa się korbą, ramię, które może wykonywać tylko
ruchy wahadłowe - wahaczem.
Zależnie od doboru stosunku długości członów czworobok może być mechanizmem
dwukorbowym, dwuwahaczowym lub korbowo-wahaczowym.
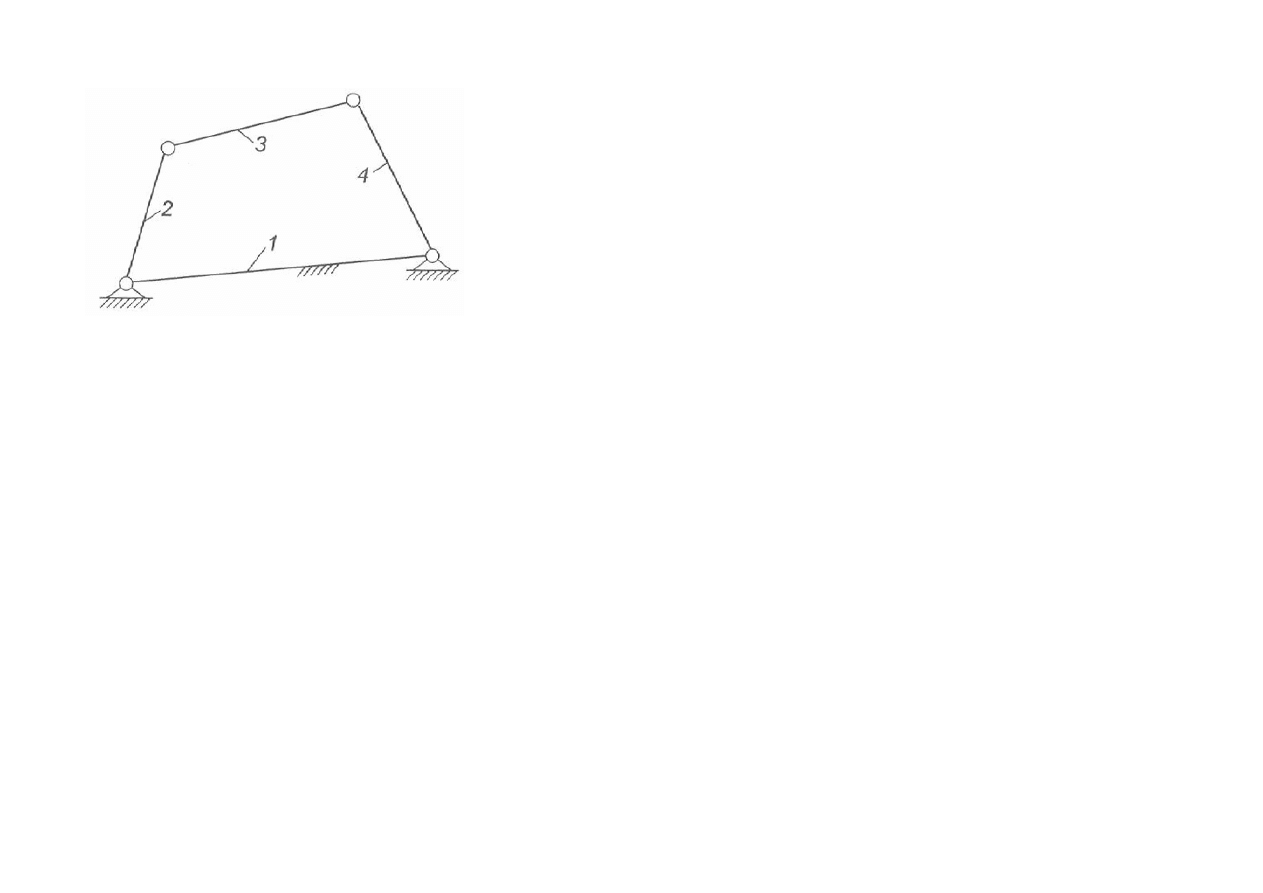
Kiedy jedno z ramion może być korbą?
Rozstrzyga to warunek zwany warunkiem Grashofa:
Jeśli l
2
< l
4
≤ l
3
≤ l
1
i człon l
1
jest podstawą, to człon l
2
jest
korbą wtedy i tylko wtedy, gdy zachodzi nierówność:
l
1
+ l
2
≤ l
3
+ l
4
2. Przekształcenia mechanizmów płaskich
Ogólnie przekształcenia mechanizmów płaskich można dokonywać na 3 sposoby, przez:
1) zastępowanie, tj. zastąpienie pary IV klasy parą klasy V,
2) inwersję, tj. zastąpienie podstawy innym członem,
3) modyfikację, tj. zastąpienie pary obrotowej parą postępową.
Czworobok przegubowy można przekształcić tylko przez inwersję lub modyfikację, bo nie
ma on par IV klasy.
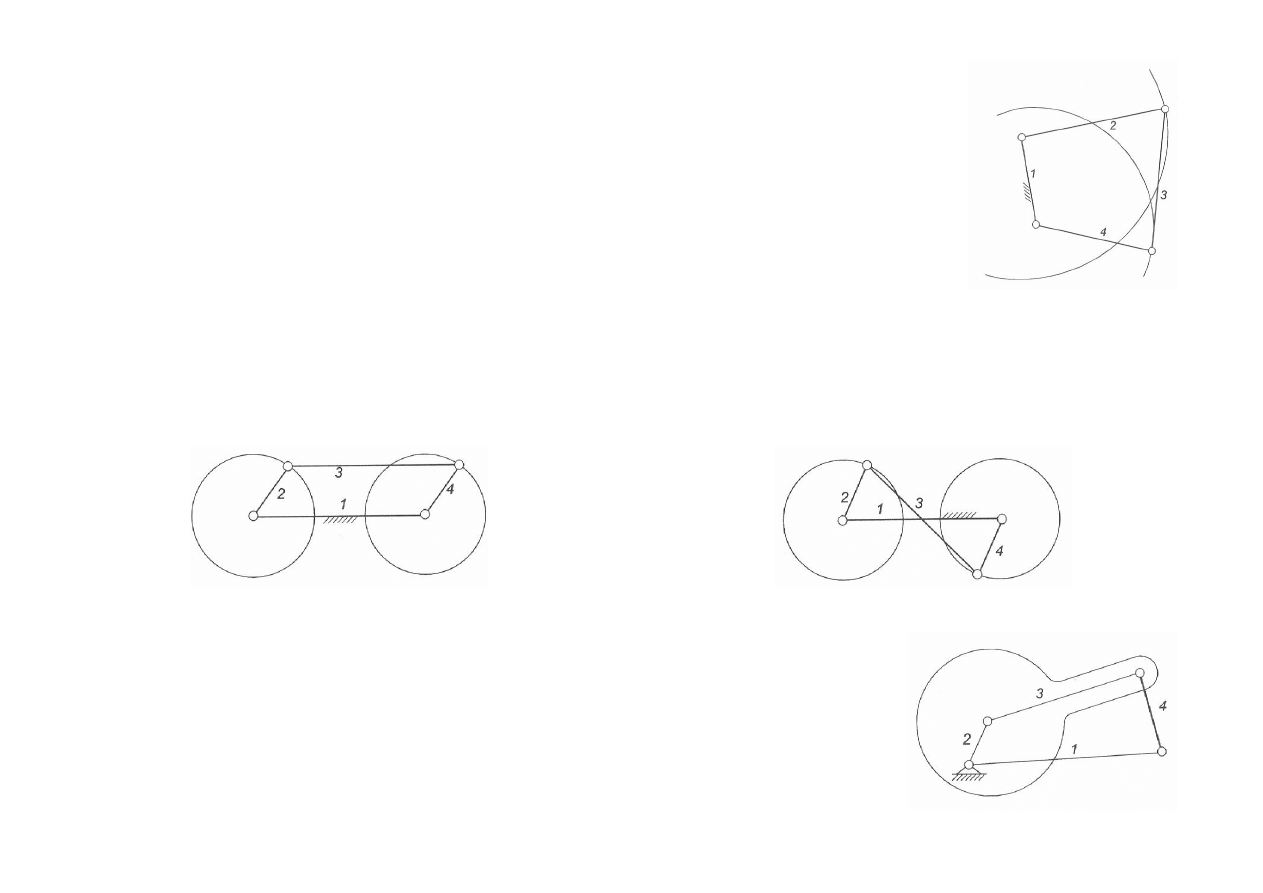
3. Inwersja i modyfikacja czworoboku
3.1. Inwersja
Jeśli l
1
jest najkrótszym członem i spełnione są warunki: l
1
+ l
2
≤ l
3
+ l
4
,
l
1
+ l
4
≤ l
2
+ l
3
otrzymuje się mechanizm dwukorbowy.
Szczególny przypadek mechanizmu dwukorbowego powstaje, gdy:
l
2
= l
4
, otrzymuje się wtedy mechanizm
l
1
= l
3
, otrzymuje się wtedy mechanizm
równokorbowy współbieżny (prostowód)
przeciwbieżny
Konstrukcyjną
odmianą
czworoboku
jest
mechanizm
mimośrodowy, który powstaje przez powiększenie czopa
korbowego. Jest to mechanizm mający szerokie zastosowanie, np.
jako piła mechaniczna.
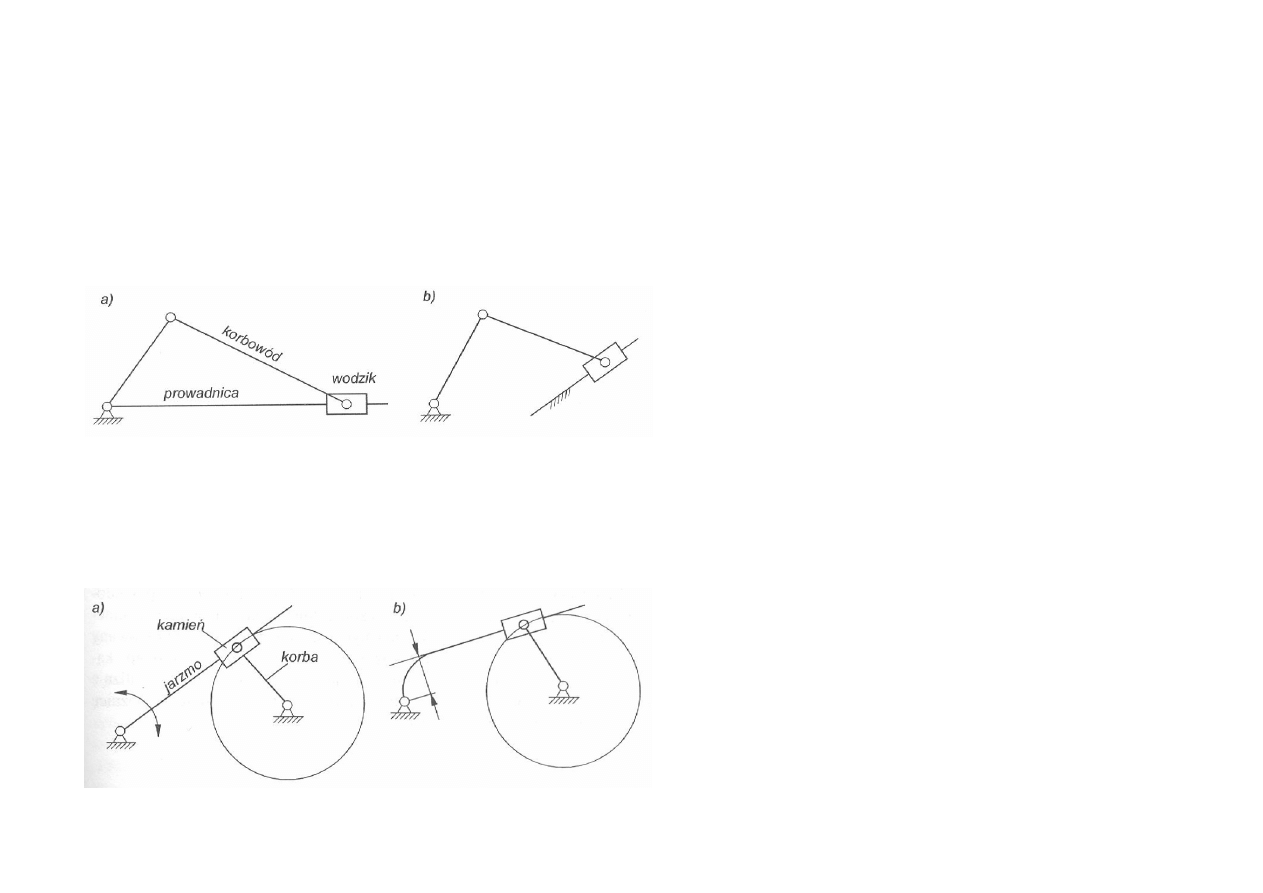
3.2. Modyfikacja
Jeśli jedno z ramion czworoboku zostanie wykonane jako korba a drugie zostanie
zastąpione parą postępową, otrzyma się mechanizm korbowo-wodzikowy symetryczny (a)
lub korbowo-wodzikowy niesymetryczny (b).
W tych mechanizmach łącznik nazywa się
korbowodem. Mechanizmy tego rodzaju, zwane
mechanizmami korbowymi, są szeroko stosowane w
budowie silników tłokowych, pomp i sprężarek.
W mechanizmie korbowo-wodzikowym wodzik
porusza się po nieruchomej prowadnicy.
Jeśli prowadnica jest ruchoma, otrzymuje się mechanizm jarzmowy. Ruchoma prowadnica
nazywa się jarzmem, zaś element poruszający się postępowo po prowadnicy - kamieniem.
Jarzmo może być jarzmem wirującym, jeśli może wykonywać pełny obrót, lub jarzmem
wahadłowym. Jeśli oś ruchu kamienia
przechodzi przez oś obrotu jarzma
mechanizm jarzmowy jest symetryczny
(a), jeśli zaś nie - mechanizm jarzmowy
jest niesymetryczny (b).

4. Mechanizmy krzywkowe
Mechanizmem krzywkowym nazywa się mechanizm złożony z pary wyższej, tzn. pary
o styku liniowym lub punktowym, klasy IV. W skład mechanizmu krzywkowgo wchodzi
krzywka i popychacz.
Zwykle (ale nie zawsze) członem napędzającym jest krzywka, napędzanym – popychacz.
Krzywka porusza się ruchem postępowym lub obrotowym, a popychacz – ruchem
postępowym zwrotnym lub wahadłowym. Mechanizm krzywkowy może być
mechanizmem płaskim lub przestrzennym.
Zalety mechanizmów krzywkowych:
−
pozwalają na zrealizowanie niemal dowolnie skomplikowanych ruchów,
−
dzięki zwartości i małym wymiarom mają zastosowanie w bardzo wielu maszynach.
Wady mechanizmów krzywkowych:
−
mała wytrzymałość, skłonność do szybkiego zużywania się i wrażliwość na uderzenia,
−
nie nadają się do przenoszenia dużych sił i są częściej stosowane do sterowania niż do
przekazywania ruchu roboczego.
Uderzenia w mechanizmie krzywkowym (zmiana sił wywołana zmianą przyspieszenia)
występują w tych punktach zarysu krzywki, w których występuje zmiana promienia
krzywizny.
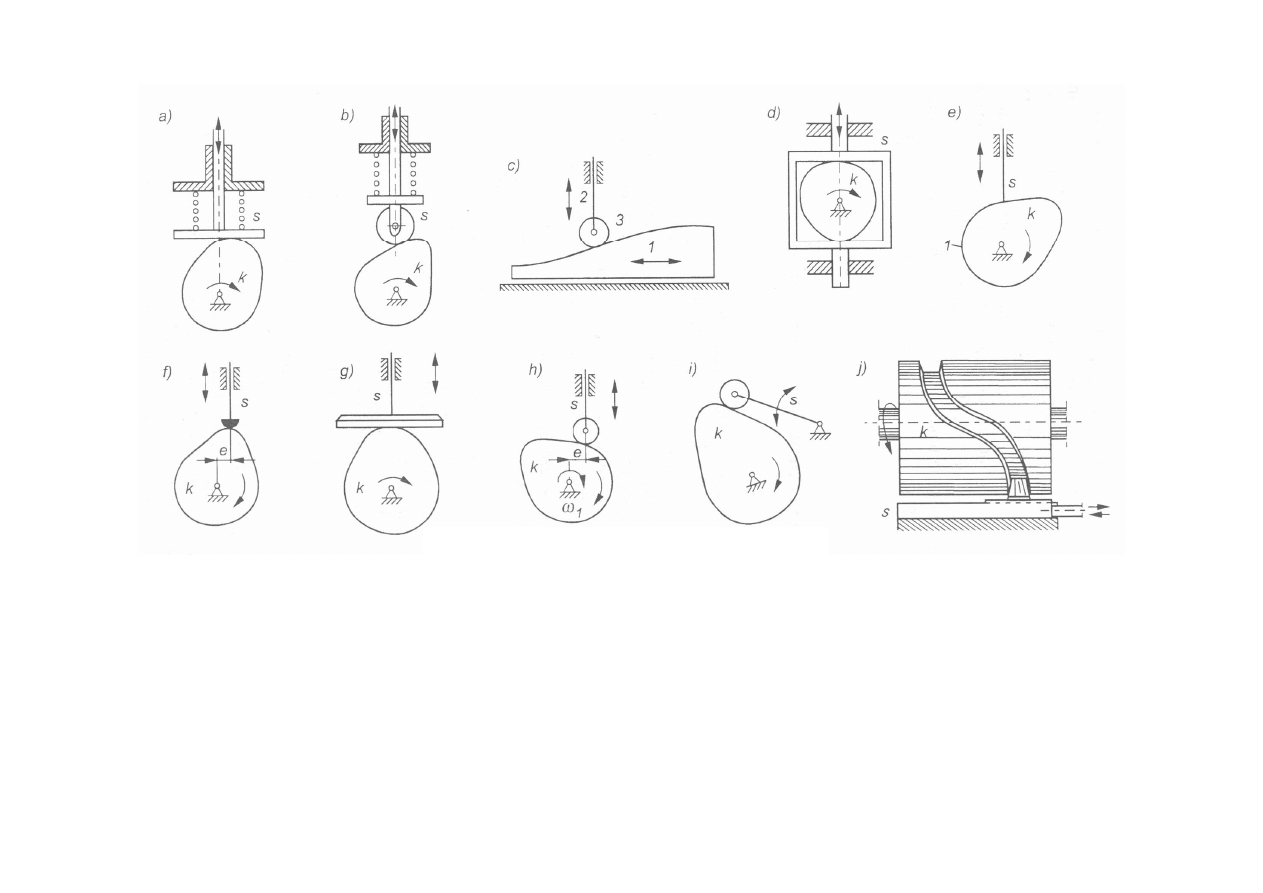
Rys. Przykłady mechanizmów krzywkowych: a) mechanizm z popychaczem płaskim, centralnym, tj. z osią
przechodzącą przez oś obrotu krzywki; b) popychacz centralny zakończony krążkiem w celu zmniejszenia tarcia;
c) mechanizm krzywkowy o ruchu postępowym (1 — krzywka, 2 — popychacz, 3 — krążek); d) popychacz płaski,
ramkowy; e) popychacz ostrzowy centralny; f) mechanizm krzywkowy z popychaczem cylindrycznym
mimośrodowym (wielkość e jest mimośrodem mechanizmu krzywkowego); g) mechanizm krzywkowy z
popychaczem centralnym płaskim; h) krzywka z popychaczem mimośrodowym krążkowym; i) mechanizm
krzywkowy z popychaczem wahadłowym krążkowym (mechanizm taki stosuje się często do sterowania);
j) mechanizm krzywkowy przestrzenny z krzywką walcową
k – krzywka, s – popychacz (czasami zwany ślizgiem)

Rysunek przedstawia także sposób zamknięcia, które może być siłowe lub kinematyczne.
Zamknięcie siłowe wymaga aby popychacz był dociskany do krzywki przez sprężynę lub
inne urządzenie zdolne do wytwarzania jednokierunkowej siły (rys. a, b). Zamknięcie
kinematyczne wymaga, by popychacz był w stałym kontakcie dwustronnym z krzywką
(rys. d, j, k).
Podział mechanizmów krzywkowych
•
„sztywne" i „podatne";
•
„wolnobieżne" i „szybkobieżne".
Wyszukiwarka
Podobne podstrony:
MECHANIKA UKŁADÓW WIELOCZŁONOWYCH 03
MECHANIKA UKŁADÓW WIELOCZŁONOWYCH 02
MECHANIKA UKŁADÓW WIELOCZŁONOWYCH 04
MECHANIKA UKŁADÓW WIELOCZŁONOWYCH 3
MECHANIKA UKŁADÓW WIELOCZŁONOWYCH 02
mechanik precyzyjny 731[03] z1 01 n
mechanik precyzyjny 731[03] o1 03 u
mechanik precyzyjny 731[03] z1 04 u
Mechanika Techniczna I Skrypt 5 03
Mechanika budowli I egzamin (03 07 09)(2)
Mechanika gruntow (14 03 2012) zadania od Flisiaka id 290908
mechanik precyzyjny 731[03] o1 04 n
mechanik precyzyjny 731[03] o1 05 n
mechanika, Laboratorium 1, 1999-03-03
mechanik precyzyjny 731[03] z2 05 u
mechanik precyzyjny 731[03] o1 05 u
mechanik precyzyjny 731[03] z1 03 n
mechanik precyzyjny 731[03] z2 01 u
więcej podobnych podstron