
POLITECHNIKA ŚWIĘTOKRZYSKA
w Kielcach
WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN
ZAKŁAD MECHATRONIKI
LABORATORIUM PODSTAW AUTOMATYKI
INSTRUKCJA
ĆWICZENIE LABORATORYJNE NR 4
Temat: Identyfikacja obiektu regulacji
Opracował:
dr inż. Krzysztof Sikora
Kielce 2006
2
Pojęcie „obiekt regulacji” (obiekt sterowania) używane jest w dwojakim sensie. W przypadku gdy
mówimy o własnościach statycznych i dynamicznych, obiekt regulacji (sterowania) należy rozumieć
jako jeden z elementów układu mający wielkość wejściową i wyjściową, określony swym równaniem
różniczkowym, transmitancją lub współrzędnymi stanu. Obiektem jest wówczas proces, którego prze-
bieg podlega regulacji lub sterowaniu, np.: proces zmiany poziomu wody w kotle, proces obróbki
skrawaniem danego przedmiotu, proces zmiany temperatury w piecu.
W drugim przypadku pojęcie obiektu ma sens aparaturowy. Oznacza ono wówczas aparaturę
technologiczną, w której zachodzi proces regulowany lub sterowany, np. kocioł, obrabiarkę, piec. Dla
uniknięcia nieporozumień i rozróżnienia obu znaczeń, w tym przypadku używane będzie dalej pojęcie
„obiekt automatyzowany”.
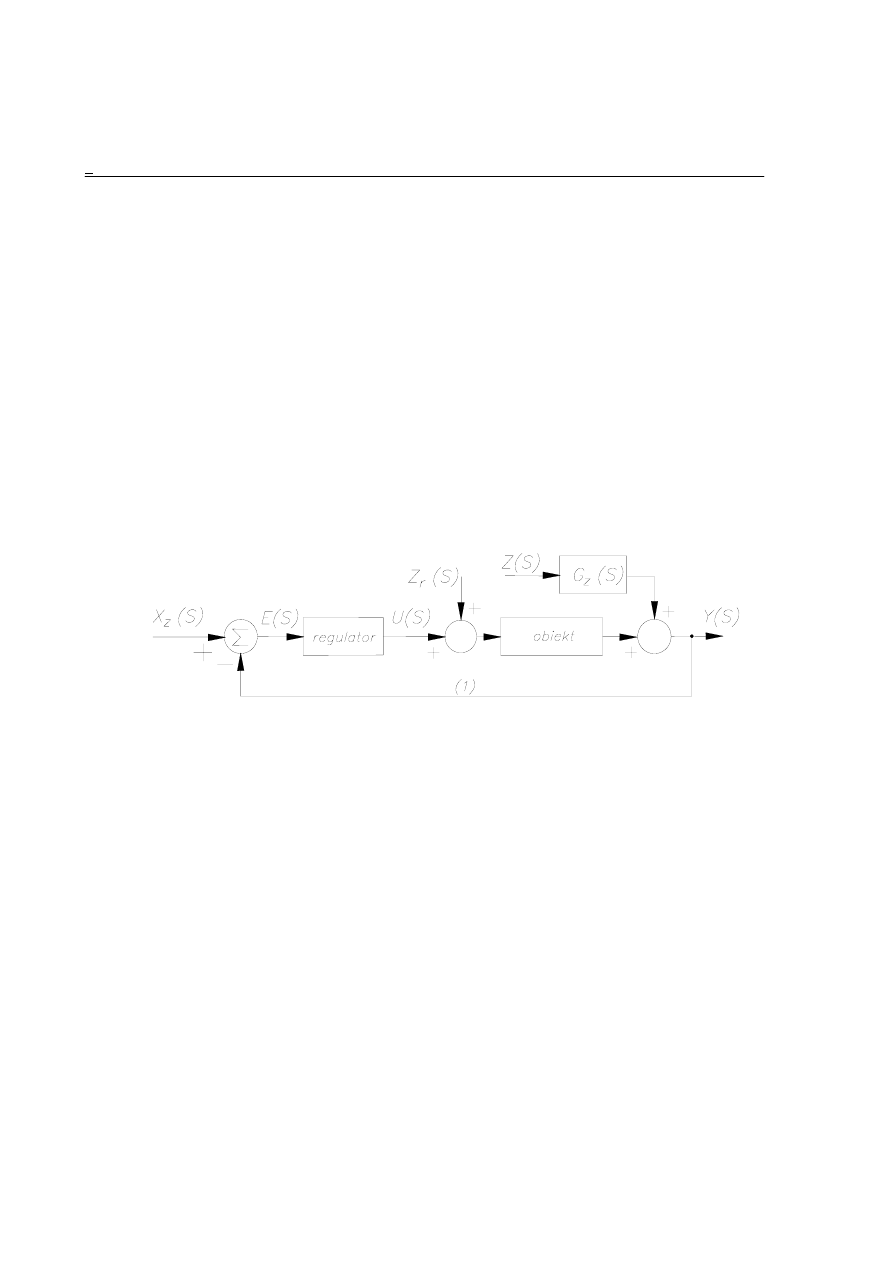
Umieszczenie obiektu regulacji w układzie regulacji przedstawiono na rysunku 1.
Rys. 1. Schemat blokowy kanoniczny układu regulacji automatycznej
Identyfikacja własności obiektów regulacji jest podstawowym warunkiem zaprojektowania
poprawnych układów regulacji.
W zasadzie własności obiektów regulacji powinny zostać określone przez technologa, który najle-
piej rozumie fizyczną stronę procesu. Często jednak konieczna jest przy tym pomoc automatyka, aby
opis własności podany był w formie użytecznej dla celów regulacji. W przypadkach procesów złożo-
nych metody analityczne mogą być traktowane jedynie jako pierwsze przybliżenie opisu procesu, a
większego znaczenia nabierają metody doświadczalne.
Obiekty, podobnie jak inne elementy automatyki, klasyfikuje się zwykle ze względu na ich wła-
sności dynamiczne. Wiele obiektów ma jednak bardziej złożone własności dynamiczne niż własności
elementów podstawowych. Dlatego spotyka się często klasyfikację bardziej ogólną, wyróżniającą
jedynie cechę samodzielnego osiągania lub nie osiągania stanu równowagi trwałej po wprowadzeniu
wymuszenia skokowego. Z tego punktu widzenia obiekty dzieli się na:
a) statyczne – zwane obiektami z wyrównaniem (bez działania całkującego), dla których
,
N
0
0
≠
b) astatyczne – zwane obiektami bez wyrównania (z działaniem całkującym), dla których
.
N
0
0
=
Identyfikacja obiektu regulacji
3
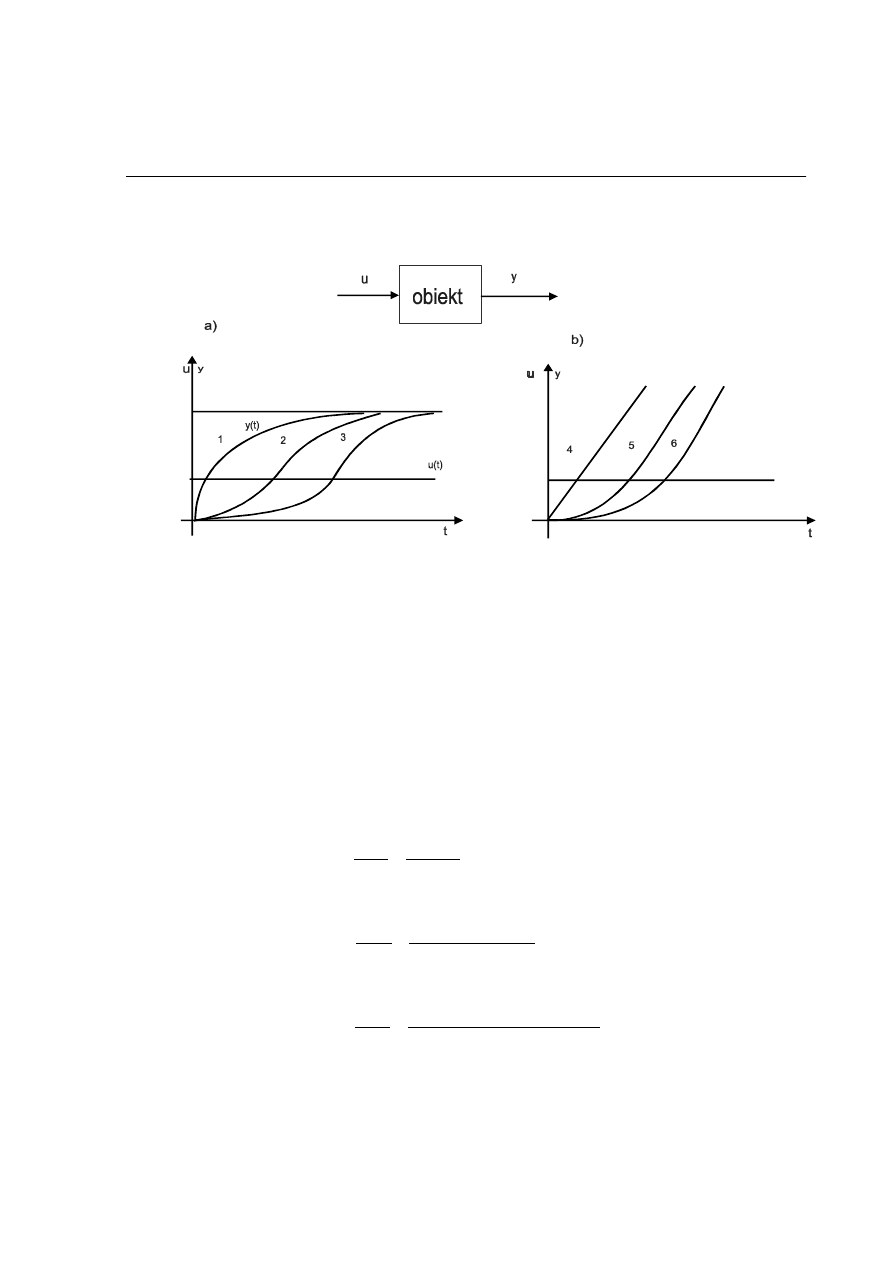
Przykładowe charakterystyki skokowe obu grup obiektów przedstawiono na rysunku 2.
Rys.2. Przykładowe charakterystyki skokowe: a) obiekty statyczne, b) obiekty astatyczne
Krzywe 1, 2 i 3 reprezentują następujące własności dynamiczne:
1) obiekt inercyjny pierwszego rzędu,
2) obiekt inercyjny wyższego rzędu,
3) obiekt inercyjny wyższego rzędu z opóźnieniem.
Jeżeli przyjmiemy przykładowo, że obiekt 2 ma inercyjność drugiego rzędu, a obiekt 3-
inercyjność trzeciego rzędu, to odpowiednie transmitancje będą miały postać:
( )
1
)
(
)
(
1
1
1
+
⋅
=
=
s
T
k
s
U
s
Y
s
G
(1)
( )
(
)(
)
1
1
)
(
)
(
2
1
2
2
+
⋅
+
⋅
=
=
s
T
s
T
k
s
U
s
Y
s
G
(2)
( )
s
e
s
T
s
T
s
T
k
s
U
s
Y
s
G
⋅
−
⋅
+
⋅
+
⋅
+
⋅
=
=
3
)
1
)(
1
)(
1
(
)
(
)
(
3
2
1
3
3
τ
(3)
gdzie:
k - współczynnik wzmocnienia,
T T T
1
2
3
, ,
- stałe czasowe obiektów,
τ
3
- opóźnienie obiektu 3.
4
Często równania opisujące własności obiektów nie są dostatecznie znane i analityczne wyznacze-
nie transmitancji jest niemożliwe. Ponadto, niektóre rodzaje obiektów charakteryzują się inercyjnością
wysokiego rzędu (np. procesy cieplne lub dyfuzyjne) i analityczne wyznaczanie ich transmitancji ma
małe znaczenie praktyczne, gdyż jest bardzo pracochłonne i prowadzi często do wyników nieścisłych
lub trudnych do wykorzystania ze względu na złożoną formę matematyczną. W takich przypadkach
opieramy się na doświadczalnie wyznaczonych charakterystykach skokowych.
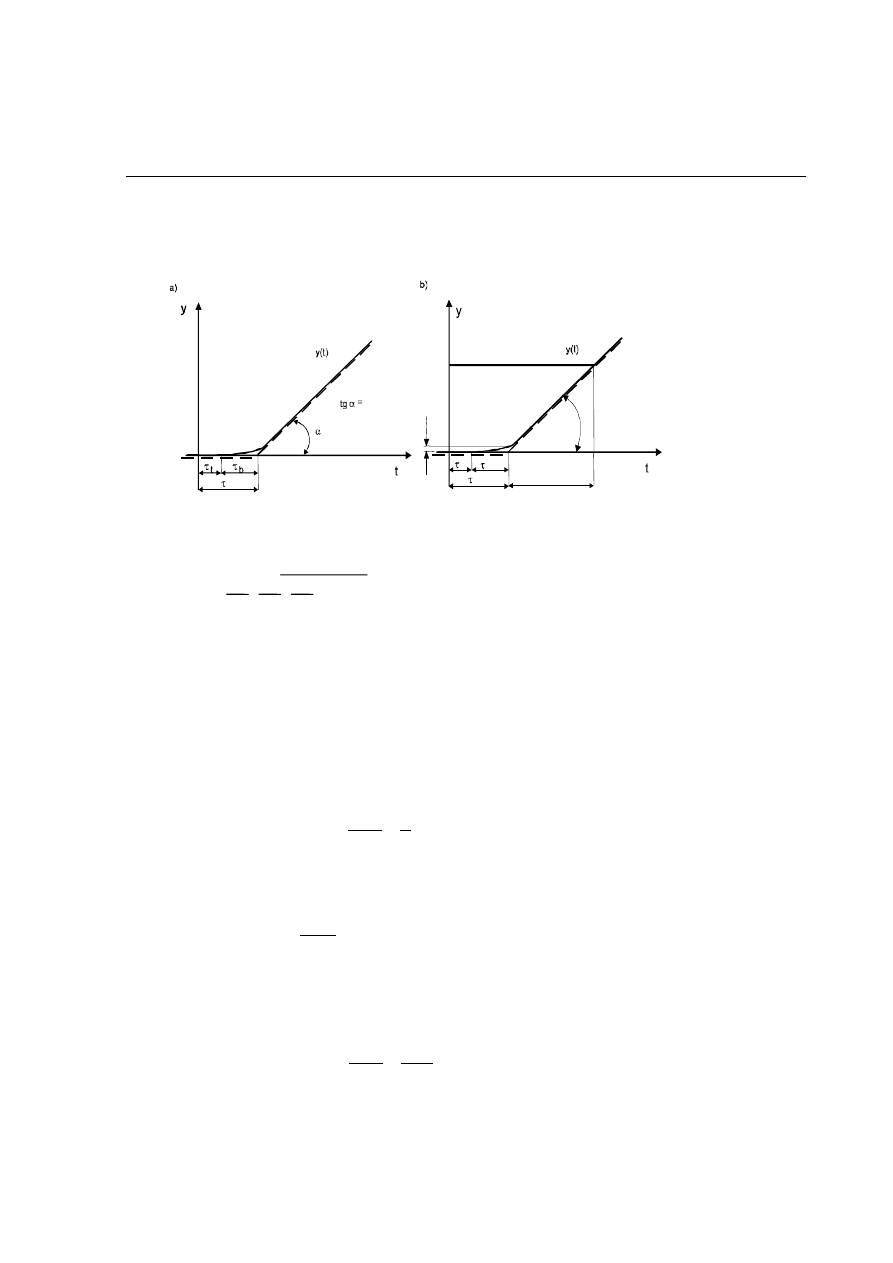
Dla obiektów statycznych, których charakterystyki skokowe mają przebieg aperiodyczny, jak na
rysunku 2a, ogólna postać charakterystyki odpowiada krzywej 3 (krzywe 1 i 2 mogą być traktowane
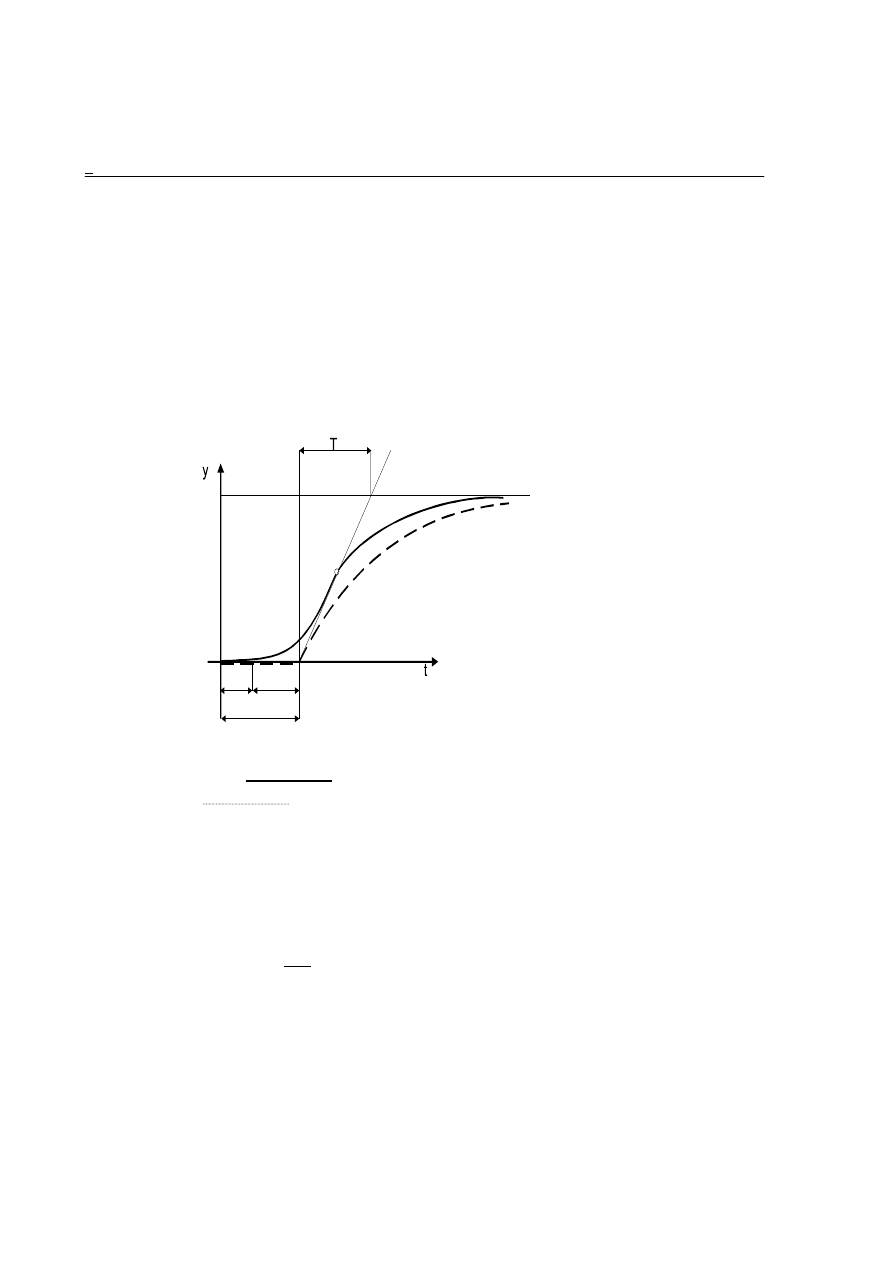
jako jej przypadki szczególne). Wyznaczoną doświadczalnie charakterystykę aproksymuje się wów-
czas graficznie za pomocą opóźnienia i inercyjności pierwszego rzędu, zgodnie z rysunkiem 3.
τ
t
τ
b
τ
Rys.3. Aproksymacja charakterystyki skokowej obiektu statycznego:
rzeczywista charakterystyka skokowa,
zastępcza (uproszczona) charakterystyka skokowa
Sposób aproksymacji jest umowny: prowadzi się styczną do charakterystyki rzeczywistej w punk-
cie przegięcia i styczna ta odcina na osi czasu zastępcze parametry obiektu - opóźnienie
τ
zwane cza-
sem zwłoki i stałą czasową T zwaną czasem wyrównania. Współczynnik wzmocnienia jest natomiast
równy
st
ust
u
y
k
=
(4)
Ściśle biorąc, zastępcze opóźnienie
τ
składa się z opóźnienia transportowego (odległościowego)
τ
t
oraz z opóźnienia bezwładnościowego (pojemnościowego)
τ
b
. Tylko dla
t
t
<
τ
rzeczywista war-
tość charakterystyki skokowej y(t) równa się zeru (
τ
t
odpowiada np.
τ
3
w transmitancji (3)).W
zagadnieniach praktycznych zwykle nie zachodzi potrzeba rozróżniania tych składników i wyznacza
się jedynie wartość
τ
. Od punktu t =
τ
charakterystykę rzeczywistą zastępuje się charakterystyką
skokową elementu inercyjnego pierwszego rzędu o stałej czasowej T (linia kreskowana na rysunku 3).
Identyfikacja obiektu regulacji
5
Transmitancja obiektu zastępczego wynosi:
s
w
e
s
T
k
s
U
s
Y
s
G
⋅
−
⋅
+
⋅
=
=
τ
1
)
(
)
(
)
(
(5)
i odpowiada równaniu różniczkowemu
(
τ
−
⋅
=
+
⋅
t
u
k
t
y
dt
t
dy
T
w
)
(
)
(
)
(6)
Inny sposób określania transmitancji zastępczej obiektu stosowany zwykle przy modelowaniu, po-
lega na przyrównaniu odpowiedzi skokowej do jednej z charakterystyk układu o transmitancji
( )
(
)
n
n
s
T
s
U
s
Y
s
G
1
1
)
(
)
(
+
⋅
=
=
(7)
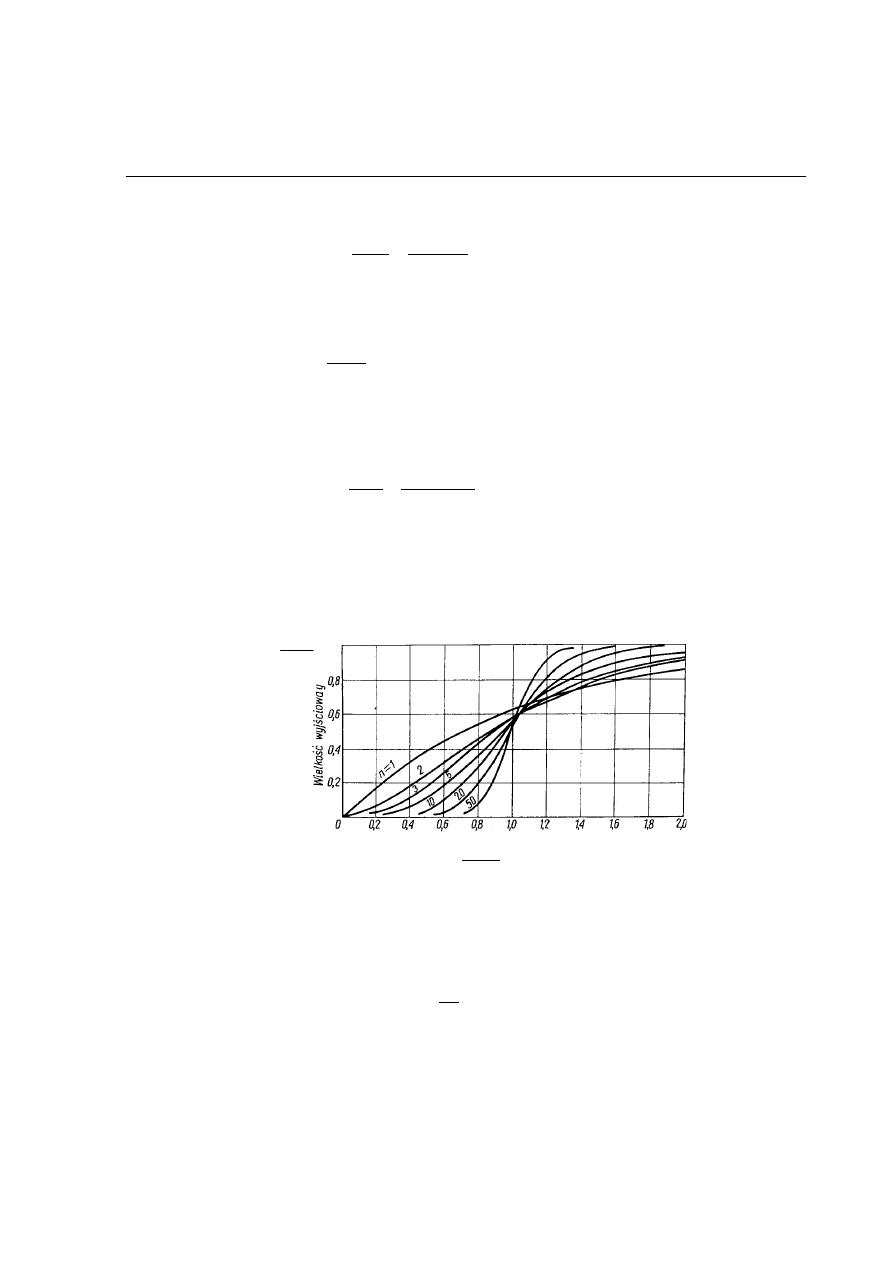
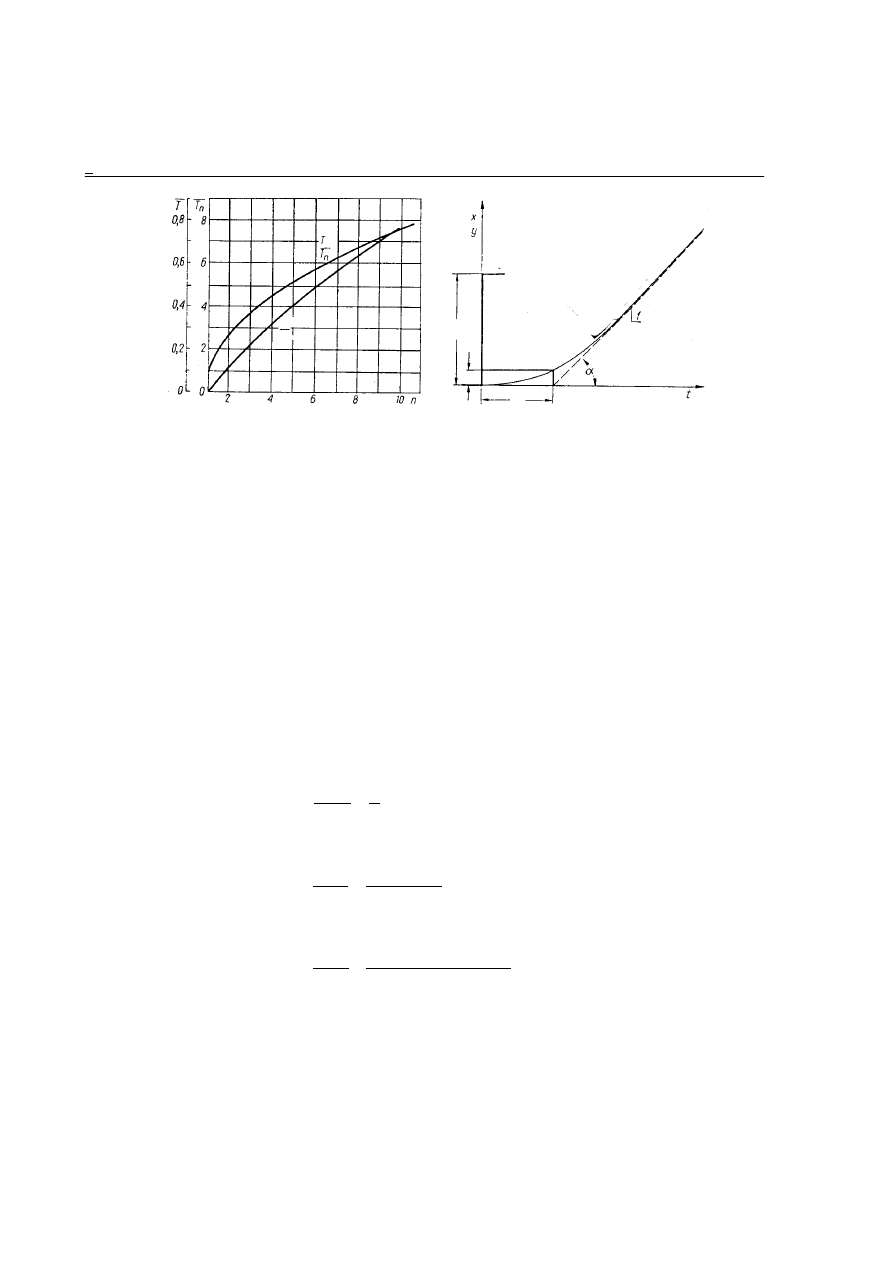
Transmitancja ta odpowiada połączeniu szeregowemu n członów inercyjnych o stałej czasowej
. Odpowiedzi skokowe tych transmitancji podano na rysunku 4.
T
n
t
n T
n
⋅
Rys. 4. Odpowiedzi skokowe układów składających się z n członów inercyjnych o tych samych stałych czasowych
Wynika z nich, że wraz ze zwiększeniem wykładnika n powiększa się początkowy płaski przebieg
charakterystyki i stosunek stałych czasowych
w
T
τ
. Zależności między wykładnikiem n a stałymi cza-
sowymi
,
w
T
τ
i
podano na rysunku 5.
T
n
y
y
ust
6
u
y
o
τ
Rys. 5. Zależności między stałymi czasowymi
,
w
T
τ
i
T
n
Transmitancję (5) można uważać za reprezentatywną dla większości obiektów statycznych.
Za pomocą tej transmitancji nie można opisać jedynie obiektów mających własności elementu oscyla-
cyjnego.
Charakterystyki skokowe obiektów astatycznych przedstawione na rysunku 2b mogą obrazować
przykładowo następujące własności dynamiczne:
4 – obiekt całkujący,
5 – obiekt całkujący z inercyjnością pierwszego rzędu,
6 – obiekt całkujący z inercyjnością drugiego rzędu i opóźnieniem.
Odpowiednie transmitancje będą wówczas:
s
k
s
U
s
Y
s
G
=
=
)
(
)
(
)
(
4
4
(8)
( )
(
)
1
)
(
)
(
5
5
+
⋅
⋅
=
=
s
T
s
k
s
U
s
Y
s
G
(9)
( )
s
e
s
T
s
T
s
k
s
s
Y
s
G
⋅
−
⋅
+
⋅
+
⋅
⋅
=
=
6
)
1
)(
1
(
)
(
)
(
2
1
6
6
τ
(10)
gdzie:
k prędkość zmiany wielkości wyjściowej na jednostkę zmiany wielkości wejściowej w sta-
nie ustalonym, nazywana niekiedy stałą rozbiegu,
3
2
1
,
,
T
T
T
stałe czasowe obiektów,
6
τ
opóźnienie transportowe (odległościowe) obiektu 6.
Identyfikacja obiektu regulacji
7
Aproksymacja doświadczalnie wyznaczonych charakterystyk obiektów astatycznych jest przed-
stawiona na rysunku 6, na przykładzie krzywej 6 (przypadek ogólny z rysunku 2b).
Rys.6. Aproksymacja charakterystyk skokowych obiektów astatycznych:
charakterystyka rzeczywista,
charakterystyka zastępcza (uproszczona);
α
t
b
y
o
u
u
k*u
st
u(t)
u
st
T
i
a) wejście i wyjście różnoimienne, b) wejście i wyjście jednoimienne
Polega ona na przedłużeniu prostej części charakterystyki skokowej, reprezentującej działanie cał-
kujące, do przecięcia z osią czasu. W wyniku otrzymujemy zastępczą charakterystykę skokową,
zaznaczoną linią kreskowaną, określoną opóźnieniem
τ
i stałą rozbiegu k (rysunek 6a).
Podobnie jak dla obiektów statycznych, zastępcze opóźnienie
τ
jest sumą opóźnień
τ
t
i
τ
b
.
Transmitancja obiektu zastępczego dla sygnałów różnoimiennych:
( )
s
e
s
k
s
U
s
Y
s
G
⋅
−
⋅
=
=
τ
)
(
)
(
(11)
odpowiada równaniu różniczkowemu:
(
)
τ
−
⋅
=
t
u
k
dt
t
dy )
(
(12)
W przypadku szczególnym, kiedy wejście i wyjście obiektu są sygnałami jednoimiennymi, za-
miast stałej rozbiegu k określa się stałą czasową akcji całkującej analogicznie jak we wzorze:
T
i
( )
s
T
s
U
s
Y
s
G
i
⋅
=
=
1
)
(
)
(
(13)
Sposób wyznaczania stałej czasowej pokazany jest na rys. 6b. Transmitancja obiektu zastęp-
czego ma wówczas postać:
T
i
8
( )
s
i
e
s
T
s
U
s
Y
s
G
⋅
−
⋅
⋅
=
=
τ
1
)
(
)
(
(14)
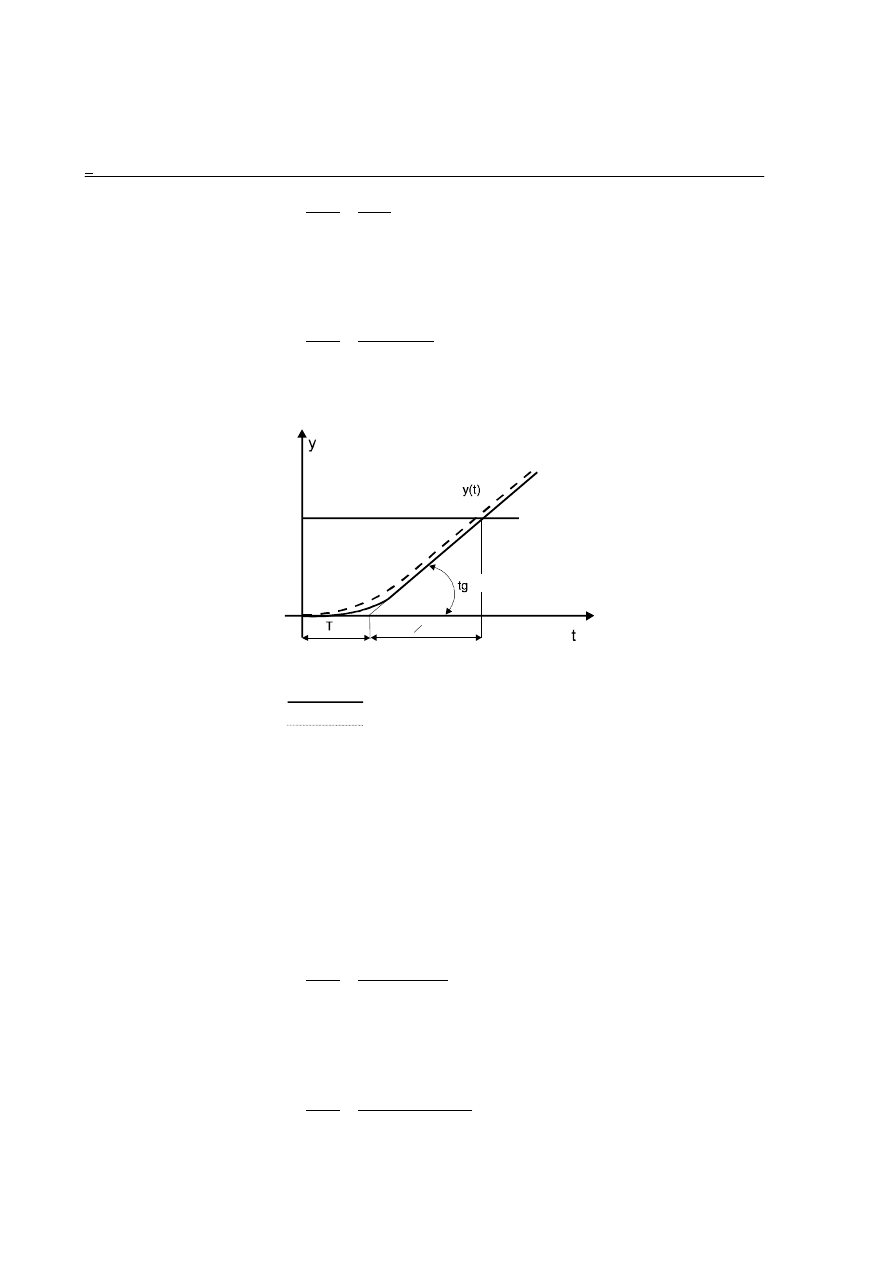
Obiekty astatyczne aproksymuje się również niekiedy za pomocą transmitancji:
( )
(
)
1
)
(
)
(
+
⋅
⋅
=
=
s
T
s
k
s
U
s
Y
s
G
(15
)
Sposób wyznaczania stałych k i T pokazano na rysunku 7.
α
1
k
u
st
u
= k*u
st
u(t)=u*1(t)
st
Rys.7. Wyznaczanie stałych k i T w przypadku aproksymacji wg transmitancji 15
charakterystyka rzeczywista
charakterystyka zastępcza
Jakość tej aproksymacji może być lepsza dla
τ
τ
b
t
>
. Zwykle jednak w początkowej fazie obli-
czeń rezygnuje się z dużej dokładności aproksymacji obiektu na rzecz prostoty postępowania. Istotną
rzeczą jest także, że aproksymacja za pomocą transmitancji (11) lub (15) pozwala prowadzić dalsze
obliczenia z pewnym zapasem bezpieczeństwa, tzn. zaostrza na ogół warunki dla pozostałych elemen-
tów układu regulacji.
Transmitancję obiektu bez wyrównania można także uzyskać porównując charakterystykę skoko-
wą obiektu na rysunku 6a z jedną z charakterystyk układu o transmitancji
( )
(
)
n
n
s
T
s
k
s
U
s
Y
s
G
1
)
(
)
(
+
⋅
⋅
=
=
(16)
lub na rysunku 6b z jedną z charakterystyk układu o transmitancji
( )
(
)
n
n
c
s
T
s
T
s
U
s
Y
s
G
1
1
)
(
)
(
+
⋅
⋅
⋅
=
=
(17)
Identyfikacja obiektu regulacji
9
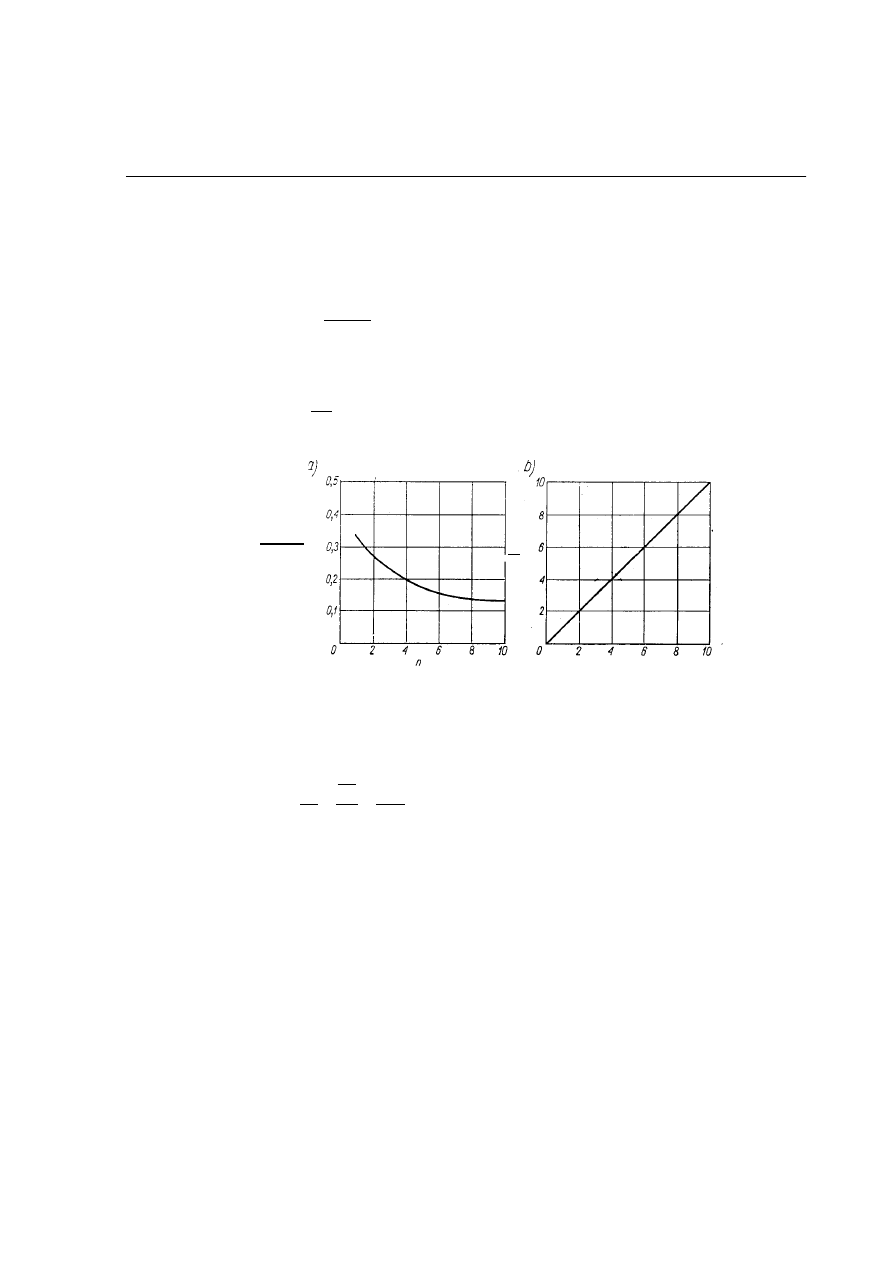
Transmitancje te odpowiadają szeregowemu połączeniu n członów inercyjnych i członu całkują-
cego. Dla wyznaczenia ilości członów inercyjnych połączonych szeregowo należy określić pomocni-
cze wyrażenie
τ
α
⋅
=
tg
0
y
c
(18
)
Liczbę członów inercyjnych n wyznacza się z wykresu na rysunku 8a. Natomiast stałą czasową
określa się ze stosunku
T
n
τ
T
n
wyznaczonego z wykresu na rysunku 8b dla wyznaczonej wartości n.
τ
T
n
c=
y
0
tg
α⋅τ
n
Rys. 8. Zależność między
τ
i
dla obiektów bez wyrównania
T
n
Stałą czasową całkowania
wyznaczamy z zależności:
T
c
st
st
c
u
u
dt
dy
T
α
tg
1
=
=
(19)
10
Wykonanie ćwiczenia
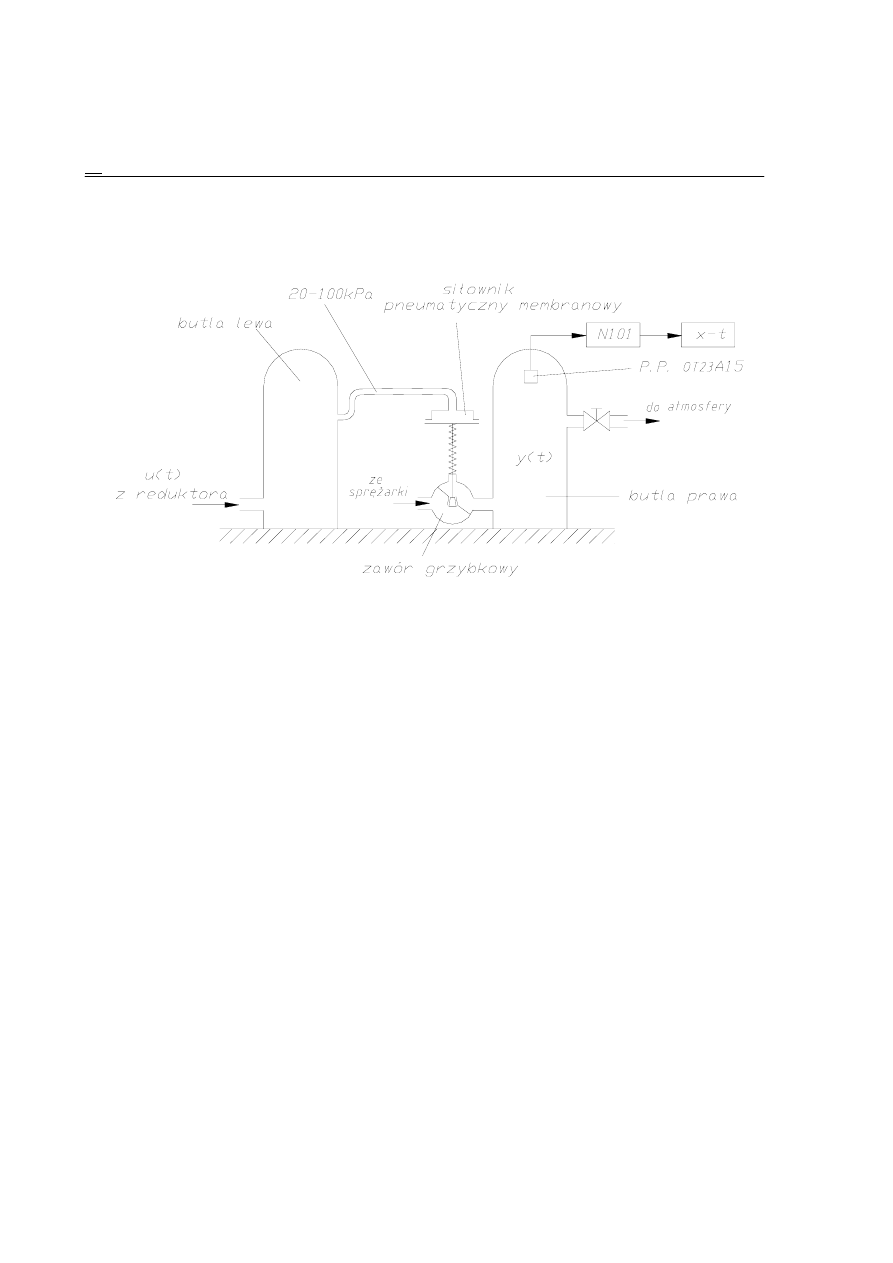
Na rysunku 9 przedstawiono schemat stanowiska badawczego.
Rys. 9. Schemat stanowiska badawczego
Stanowisko badawcze składa się z dwu butli stalowych i zaworu grzybkowego sterowanego si-
łownikiem pneumatycznym membranowym. Wylot lewej butli jest połączony z wejściem siłownika
membranowego. Do butli prawej tłoczone jest powietrze ze sprężarki przez zawór grzybkowy. Powie-
trze znajdujące się w tej butli jest zużywane w procesie technologicznym. Powoduje to ciągłą zmianę
jego ciśnienia. Do pomiaru ciśnienia powietrza w prawej butli używamy czujnika indukcyjnego
OT23A15 zasilanego z miernika wielkości mechanicznych N101. Napięcie odpowiadające ciśnieniu
przesyłane jest do rejestratora x - t. Na rejestratorze zapisujemy wyjście y(t) czyli ciśnienie powietrza
w butli. Na zasilaniu zaworu grzybkowego znajduje się reduktor. Za pomocą pokrętła tego reduktora
ustawiamy na manometrze ciśnienie zasilania prawej butli 1,5 atm. Na wejściu lewej butli również
znajduje się reduktor zasilany ze sprężarki ciśnieniem 1,5 atm. Pokrętłem reduktora ustawiamy war-
tość ciśnienia równą
u
kPa
st
= 120
. Jest to sygnał wejściowy do obiektu regulacji. Sygnału tego nie
rejestrujemy ponieważ nie zmienia się w trakcie pomiarów. Między reduktorem a butlą umieszczony
jest zawór odcinający ręczny. Powinien być zastosowany zawór odcinający sterowany elektrycznie.
Przed wykonaniem ćwiczenia zawór ten jest zamknięty. Podczas rejestracji ciśnienia w prawej butli,
pisak rejestratora przesuwa się z prędkością 1mm/s. Wielkością wejściową do identyfikowanego
obiektu jest sygnał skokowy pneumatyczny
u
kPa
st
= 120
, a wyjściową ciśnienie w prawej butli.
Po zarejestrowaniu na papierze lub dysku komputera wyjścia y(t) dokonujemy identyfikacji obiek-
tu jedną z metod podanych w instrukcji. Na otrzymany z pomiarów wykres należy nanieść wykres
otrzymany z obliczeń. Ma to na celu ocenę dokładności przeprowadzonej identyfikacji obiektu. W
wyniku identyfikacji otrzymujemy model matematyczny obiektu w postaci transmitancji lub równania
różniczkowego z wartościami parametrów.
Literatura:
1. B. Chorowski, M. Werszko: Mechaniczne Urządzenia Automatyki. WNT. Warszawa.
2. M.
Żelazny: Podstawy Automatyki. PWN. Warszawa 1976.
Document Outline
Wyszukiwarka
Podobne podstrony:
Podstawy automatyki nr 2
Podstawy automatyki nr 1
Podstawy automatyki nr 2
Podstawy automatyki nr 6
Podstawy automatyki nr 4
Podstawy automatyki nr 1
podstawy automatyki ćwiczenia lista nr 4b
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 4d
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 1b
podstawy automatyki ćwiczenia lista nr 5a
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
więcej podobnych podstron