POLITECHNIKA ŚWIĘTOKRZYSKA
w Kielcach
WYDZIAŁ MECHATRONIKI I BUDOWY MASZYN
ZAKŁAD MECHATRONIKI
LABORATORIUM PODSTAW AUTOMATYKI
INSTRUKCJA
ĆWICZENIE LABORATORYJNE NR 6
Temat: Układ automatycznej regulacji temperatury
Opracował:
mgr inż. Marcin Majzel
dr Jakub Takosoglu
Kielce 2008

1. Cel ćwiczenia
Celem ćwiczenia jest automatyczna regulacja temperatury w modelu pomieszczenia
wykonanego z pleksi. W czasie wykonywania ćwiczenia należy:
−
zapoznać się z metodami doboru nastaw regulatorów,
−
podłączyć stanowisko i wykreślić charakterystyki
−
obliczyć wskaźniki jakości regulacji.
2. Podstawy teoretyczne
.1. Przyrządy do pomiaru temperatury
2
Pomiary temperatury dokonywane są tylko w sposób pośredni, poprzez pomiar
wielkości, której zmienność w funkcji temperatury jest znana. Takich wielkości jest wiele.
W praktyce najczęściej spotykamy się z termometrami cieczowymi (np. rtęciowymi), gdzie
wykorzystywana jest zmienność objętości cieczy wraz ze zmianą temperatury. Przyrządy do
pomiaru temperatury można podzielić według rodzaju wykorzystywanej wielkości lub
stywanej wielkości:
sposobu pomiaru. Pierwsze kryterium – ze względu na rodzaj wykorzy
talowe,
a) przyrządy nieelektryczne - np. cieczowe, dylatacyjne, bime
b) przyrządy elektryczne - np. rezystancyjne, termoelementy.
W przypadku przyrządów elektrycznych rozróżnia się czujnik i miernik. Przykładem
mogą być czujniki rezystancyjne. Są to przyrządy reagujące na zmianę temperatury zmianą
rezystancji wbudowanego w nie elementu rezystancyjnego. Zasada działania czujników
rezystancyjnych polega na wykorzystaniu zjawiska zmiany rezystancji metali wraz z
temperaturą. Najczęściej stosowana jest tu platyna. Innym przykładem są czujniki
termoelektryczne (termoelementy, termopary). Są to układy dwóch przewodów z metali lub
półprzewodników o różnych własnościach termoelektrycznych, połączonych z jednego końca
spoiną (spoina pomiarowa). Zmiana temperatury spoiny złącza wywołuje powstanie siły
termoelektrycznej, której wartość przy wolnych końcach umieszczonych w ośrodku o stałej
temperaturze umożliwia określenie temperatury ośrodka, w którym umieszczone jest złącze.
Stosowane są głównie jako elementy termometrów termoelektrycznych, termostatów oraz
generatorów termoelektrycznych.
la sposób pomiaru:
Drugie kryterium okreś
a) przyrządy stykowe,
b) przyrządy bezstykowe – pirometry.
Pomiar przyrządami stykowymi zaburza pole temperatur. Pirometr natomiast jest przyrządem
do pomiaru temperatury ciał bez bezpośredniego kontaktu z nimi (metody bezstykowe).
Wykorzystuje zależność pomiędzy temperaturą ciała, a natężeniem promieniowania przez nie
emitowanego. Pirometry służą do pomiarów temperatury o wartości od kilkuset do kilku
ysięcy stopni Celsjusza. Pomiar dokonywany jest z pewnej odległości.
t
.2. Charakterystyka regulatorów
2
Regulator to jeden z elementów wchodzących w skład obwodu regulacji. Zadanie
regulatora polega na odpowiednim kształtowaniu sygnału sterującego obiektu regulowanego,
tak aby obiekt regulowany zachowywał się w pożądany sposób. Regulator czerpie informacje
o zachowaniu obiektu regulowanego najczęściej ze sprzężenia zwrotnego.
Regulator służy do doprowadzenia obiektu do żądanego stanu lub poprawy
niekorzystnych cech obiektu regulowanego.

Klasyczne regulatory:
•
•
regulator trójnastawny,
•
regulator P,
•
regulator I,
•
regulator D,
•
regulator PI,
•
regulator PD,
•
regulator PID.
2.2.1. Regulator dwustawny (bez histerezy)
Sygnał sterujący regulatora dwustawnego opisuje równanie:
⎩
⎨
⎧
<
≥
=
0
0
)
(
2
1
ε
ε
gdy
U
gdy
U
t
U
,
(1.1)
gdzie:
−
2
1
,U
U
stałe,
ε – sygnał uchybu.
2.2.2. Regulator trójstawny
Sygnał sterujący regulatora trójstawnego opisuje równanie:
⎪
⎪
⎩
⎪
⎪
⎨
⎧
−
<
<
>
=
α
ε
α
ε
α
ε
gdy
U
gdy
U
gdy
U
t
U
3
2
1
)
(
, (1.2)
gdzie:
−
2
1
,U
U
stałe,
ε – sygnał uchybu.
2.2.3. Regulator P
Transmitancja operatorowa idealnego regulatora typu P ma postać:
p
r
k
s
E
s
U
s
G
=
=
)
(
)
(
)
(
,
(1.3)
gdzie:
k
p
–
współczynnik wzmocnienia regulatora.
Sygnał sterujący wytwarzany przez regulator typu P jest opisany zależnością:
)
(
)
(
t
e
k
t
u
p
⋅
=
,
(1.4)

gdzie:
k
p
–
współczynnik wzmocnienia regulatora,
e(t) –
sygnał uchybu.
Współczynnikiem wzmocnienia nazywa się stosunek przerostu składowej proporcjonalnej
sygnału sterującego regulatora do przyrostu sygnału uchybu:
e
u
k
p
∆
∆
=
,
(1.5)
gdzie:
∆u –
przyrost składowej proporcjonalnej sygnału sterującego,
∆e –
przyrost sygnał uchybu.
Zakres proporcjonalności określa się jako odwrotność współczynnika wzmocnienia regulatora
i wyrażany jest w procentach. Związek między współczynnikiem wzmocnienia, a zakresem
proporcjonalności opisuje zależność:
%
⋅
=
100
1
p
p
k
x
,
(1.6)
gdzie:
x
p
–
zakres proporcjonalności regulatora,
k
p
–
współczynnik wzmocnienia regulatora.
2.2.4. Regulator I
Transmitancja operatorowa idealnego regulatora typu I ma postać:
s
T
s
G
i
r
1
)
(
=
,
(1.7)
gdzie:
T
i
–
stała całkowania,
s –
zmienna zespolona w przekształceniu Laplace'a.
Regulator typu I charakteryzuje się tym, że jego sygnał wyjściowy u(t) jest proporcjonalny do
całki sygnału wejściowego e(t). Sygnał sterujący wytwarzany przez regulator typu I jest
opisany zależnością:
τ
τ
d
e
T
t
u
t
i
∫
=
0
)
(
1
)
(
,
(1.8)
gdzie:
T
i
–
stała całkowania,
Stała całkowania jest to czas, po którym sygnał u(t) osiągnie wartość podaną na wejściu
regulatora. Rzeczywisty regulator całkujący opisany jest transmitancją:
)
1
(
1
)
(
sT
Ts
s
G
r
+
=
,
(1.9)
gdzie:
T
– stała czasowa inercji,
2.2.5. Regulator D
Transmitancja operatorowa idealnego regulatora typu D ma postać:
s
T
s
G
d
r
=
)
(
,
(1.10)
gdzie:
T
d
– jest stałą różniczkowania,
Sygnał sterujący wytwarzany przez regulator typu D jest opisany zależność:
[
)
(
)
(
t
e
d
d
T
t
u
t
d
=
]
,
(1.11)
gdzie:
T
d
– jest stałą różniczkowania,
e(t) –
sygnał uchybu w funkcji czasu.
2.2.6. Regulator PI
Regulator typu PI realizuje sumaryczne działania proporcjonalnego i całkującego.
Transmitancja idealnego regulatora typu PI ma postać:
)
1
1
(
)
(
s
T
k
s
G
i
p
r
+
=
,
(1.12)
gdzie:
k
p
–
współczynnik wzmocnienia regulatora,
T
i
–
czas zdwojenia.
Stała czasowa Ti nazywana jest
czasem zdwojenia. Określa czas potrzebny na to, by przy
wymuszeniu skokowym na wejściu regulatora uzyskać na jego wyjściu sygnał dwukrotnie
większy od tego, który wynika ze współczynnika wzmocnienia regulatora. Regulator PI
charakteryzuje się tym że, sygnał wyjściowy u(t) jest proporcjonalny do sumy sygnału
wejściowego e(t) i całki z tego sygnału proporcjonalnej do 1/T
i
. Sygnał sterujący wytwarzany
przez regulator typu PI jest opisany zależnością:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
=
∫
t
i
p
d
e
T
t
e
k
t
u
0
)
(
)
(
1
)
(
)
(
τ
τ
,
(1.13)
gdzie:
k
p
– współczynnik wzmocnienia regulatora,
T
i
– czas zdwojenia.
2.2.7. Regulator PD
Transmitancja operatorowa idealnego regulatora typu PD ma postać:
)
1
(
)
(
s
T
k
s
G
d
p
r
+
=
,
(1.14)
gdzie:
k
p
–
współczynnik wzmocnienia regulatora,
T
d
–
stała wyprzedzenia.
W regulatorze PD sygnał wyjściowy u(t) jest proporcjonalny do sumy sygnału wejściowego
e(t)
oraz różniczki tego sygnału de(t)/dt. Sygnał sterujący wytwarzany przez regulatora typu
PD jest opisany zależnością:
⎥⎦
⎤
⎢⎣
⎡
+
=
dt
t
de
T
t
e
k
t
u
d
p
)
(
)
(
)
(
,
(1.15)
gdzie:
k
p
–
współczynnik wzmocnienia regulatora,
T
d
–
stała wyprzedzenia,
e(t) –
sygnał uchybu.
Stała wyprzedzenia T
d
jest to czas, po upływie którego od podania na wejście regulatora PD
sygnału narastającego liniowo, sygnał na wyjściu regulatora osiągnął dwukrotną wartość tej,
która wynika z działania różniczkowego.
2.2.8. Regulator PID
Transmitancja operatorowa regulatora PID ma postać:
)
1
1
(
)
(
s
T
s
T
k
s
G
d
i
p
r
+
+
=
,
(1.16)
gdzie:
k
p
– współczynnik wzmocnienia regulatora,
T
d
– stała wyprzedzenia,
T
i
– czas zdwojenia.
W praktyce mamy do czynienia z rzeczywistymi regulatorami, których transmitancję możemy
zapisać jako:
)
1
1
(
1
)
(
s
T
s
T
sT
k
s
G
d
i
p
r
+
+
+
=
,
(1.17)
gdzie:
k
p
– współczynnik wzmocnienia regulatora,
T
d
– stała wyprzedzenia,
T
i
– czas zdwojenia,
T –
stała czasowa inercji,
s –
zmienna zespolona w przekształceniu Laplace'a.
Regulator typu PID realizuje sumaryczne działania regulatorów P, I oraz D, stąd sygnał
sterujący możemy wyrazić wzorem:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
+
=
∫
dt
t
de
T
d
e
T
t
e
k
t
u
d
t
i
p
)
(
)
(
)
(
1
)
(
)
(
0
τ
τ
,
(1.18)
gdzie:
k
p
–
współczynnik wzmocnienia regulatora,
T
d
–
stała wyprzedzenia,
T
i
–
czas zdwojenia.
3. Metody doboru nastaw regulatorów
k
T
o
Na bazie obserwacji eksperymentalnych strategii strojenia regulatorów PID
w procesach przemysłowych, Ziegler i Nichols zaproponowali dwie metody doboru nastaw.
Metody te wymagają pomiaru odpowiedzi układu i są powszechnie stosowane dla układów
statycznych najczęściej spotykanych w układach sterowania (np. sterowanie poziomem,
temperaturą, ciśnieniem, przepływem, itd.). Metody doboru nastaw opracowane przez
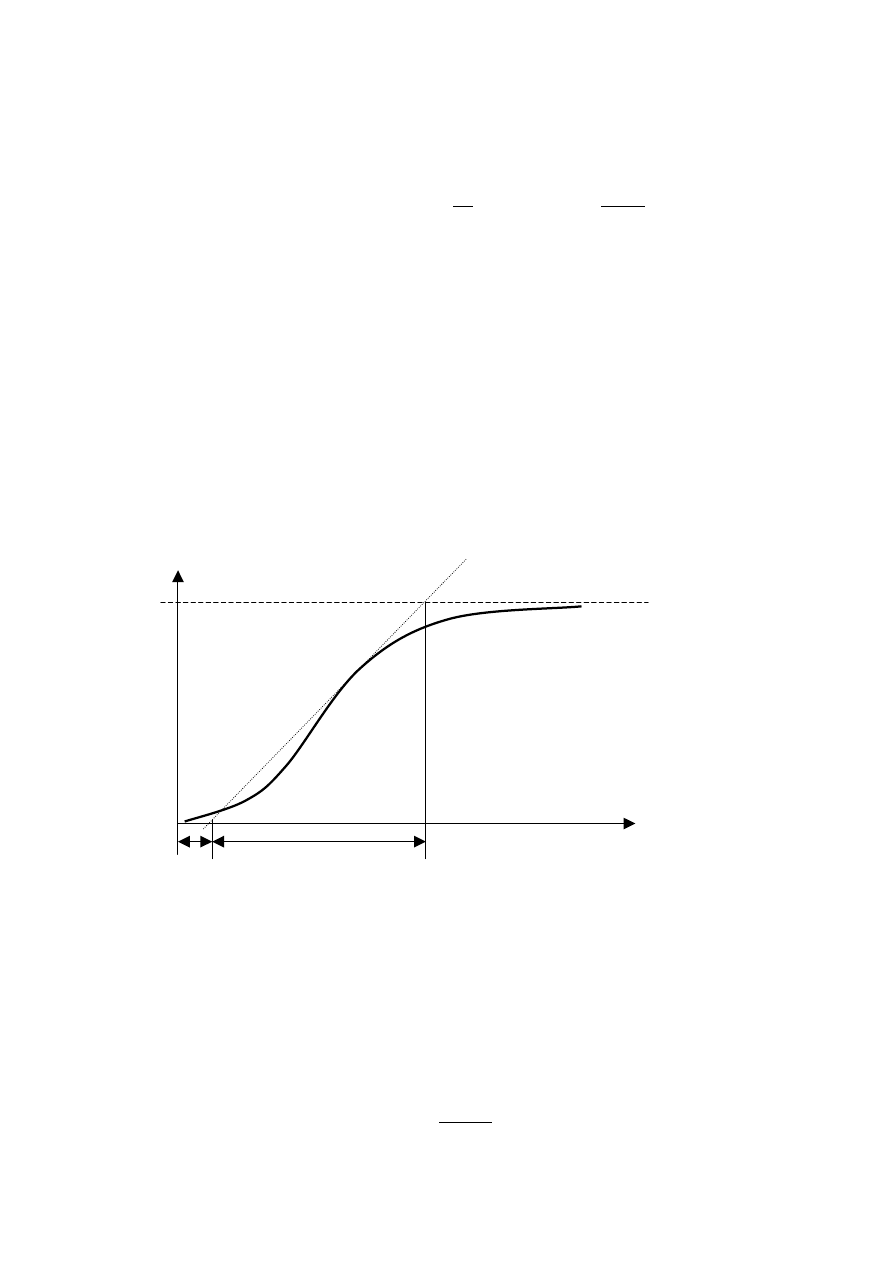
Zieglera i Nicholsa wymagają wyznaczenia odpowiedzi skokowej i możliwe są do
zastosowania w tych układach, w których odpowiedź skokowa układu otwartego jest bez
przeregulowań jak przedstawiono na rys. 1.
t
T
Rys. 1. Sposób określenia parametrów k, T, T
o
na podstawie odpowiedzi skokowej
(jednostkowej) procesu dla obiektu statycznego wieloinercyjnego
3.1. Metoda bazująca na odpowiedzi skokowej
Odpowiedź skokowa wielu obiektów (zmierzona doświadczalnie albo otrzymana
w wyniku symulacji) ma kształt jak na rys. 1. Odpowiedź taka jest charakterystyczna dla
układów inercyjnych wyższych rzędów, lecz można ją aproksymować charakterystyką
skokową członu inercyjnego I-go rzędu z opóźnieniem transportowym:
s
T
e
Ts
k
s
G
0
1
)
(
−
⋅
+
=
,
(1.19)
Wykres o kształcie S jest charakterystyczny dla układów inercyjnych wyższych rzędów.
Transmitancja (1.20) aproksymuje układy wyższych rzędów prostym układem pierwszego
rzędu z dodatkowym opóźnieniem T
o
wyrażonym w sekundach. Stałe w równaniu (1.20)
mogą być określone z odpowiedzi skokowej procesu. Jeśli styczna narysowana jest w punkcie
przegięcia krzywej odpowiedzi, wówczas nachylenie linii jest wyznaczane ze wzoru R=k/T,
natomiast przecięcie stycznej z osią czasu określa czas opóźnienia T
0
.
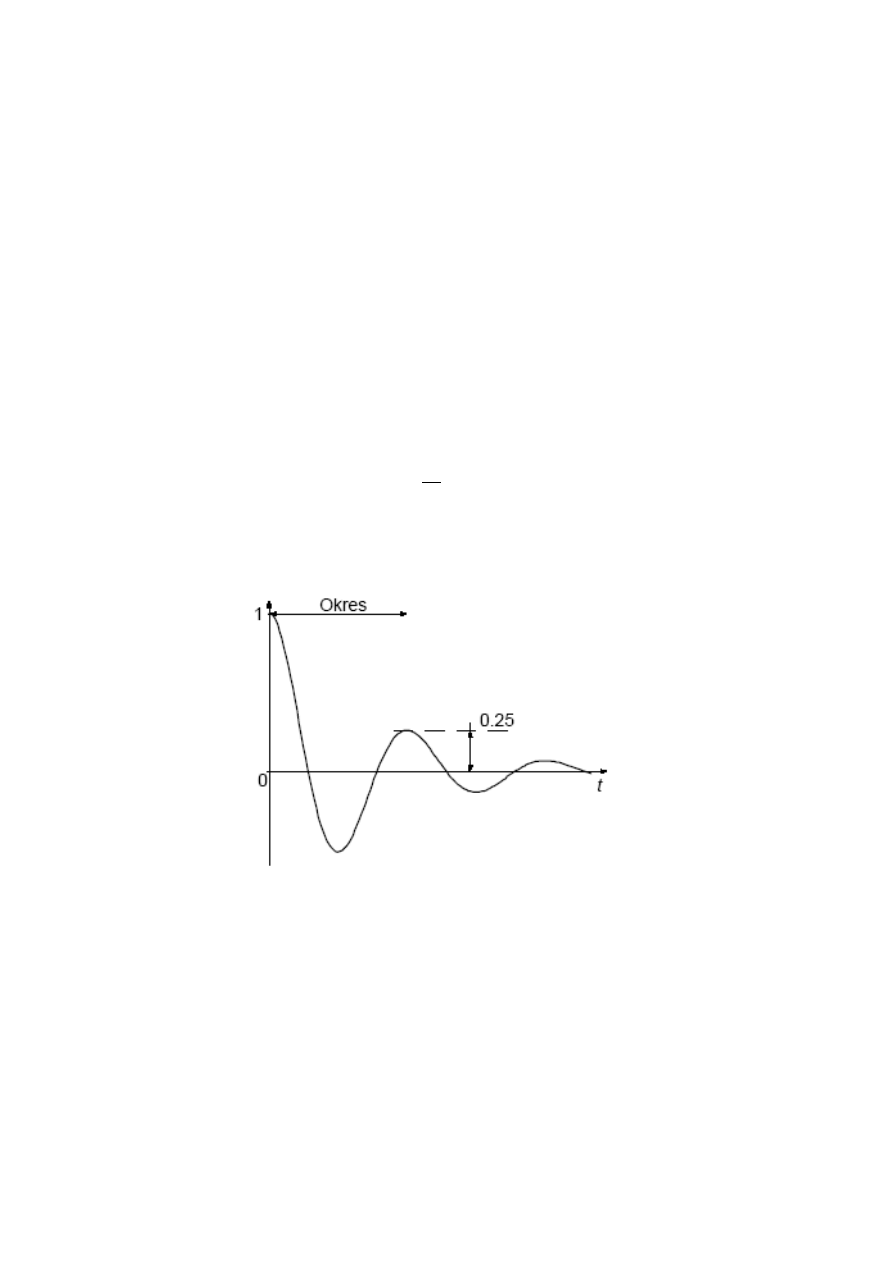
W pierwszej metodzie wybór parametrów regulatora opiera się na współczynniku
zanikania wynoszącym w przybliżeniu 0.25. Oznacza to, że dominująca składowa
przejściowa zanika do jednej czwartej swojej wartości maksymalnej po jednym okresie
oscylacji (rys. 2). Takie zanikanie odpowiada współczynnikowi ζ = 0.21 w układzie II-go
rzędu i wartość ta ustalona została na zasadzie kompromisu pomiędzy szybką odpowiedzią i
wystarczającym zapasem stabilności.
Ziegler i Nicholsa symulowali równania dla różnych układów na komputerze
analogowym i stroili parametry regulatorów, aż uzyskali odpowiedzi przejściowe zanikające
do 25% poprzedniej wartości w jednym okresie. Metoda Zieglera-Nicholsa bazująca na
odpowiedzi skokowej daje dobre rezultaty gdy spełniony jest następujący warunek:
6
.
0
15
.
0
<
<
T
T
o
,
(1.20)
gdzie:
T
o
– czas opóźnienia,
T – czas wyrównania.
Rys. 2. Kwadratowy współczynnik zanikania
Parametry regulatora zaproponowane przez Zieglera i Nicholsa dla typowych regulatorów P,
PI, PID zebrano w tab. 1.
Tab. 1. Strojenie parametrów regulatorów P, PI, PID metodą odpowiedzi skokowej Zieglera -
Nicholsa
Optymalne wzmocnienia
Typ regulatora
K
p
T
i
D
T
P
1/a - -
PI
0.9/a
3
0
T
-
PID
1.2/a
2
0
T
0.5
0
T
3.2. Metoda z wyznaczaniem wzmocnienia krytycznego
W drugiej metodzie kryterium strojenia parametrów opiera się na ocenie układu
znajdującego się na granicy stabilności. Ten algorytm strojenia może być stosowany do samo
nastrajania regulatorów PID. Metoda ta możliwa jest do zastosowania jeśli możliwe jest
znalezienie wzmocnienia, przy którym wykres Nyquista przecina punkt krytyczny lub kiedy
linia pierwiastkowa przecina oś liczb urojonych. Wzmocnienie krytyczne może być
znalezione eksperymentalnie. Wymaga się wówczas zwiększania wzmocnienia w układzie
zamkniętym aż na wyjściu pojawią się oscylacje o stałej amplitudzie. Jest to w niektórych
zastosowaniach praktycznych bardzo niebezpieczna operacja. Zwiększa się wzmocnienie
proporcjonalnie, aż zauważy się oscylacje o stałej amplitudzie, co odpowiada wzmocnieniu
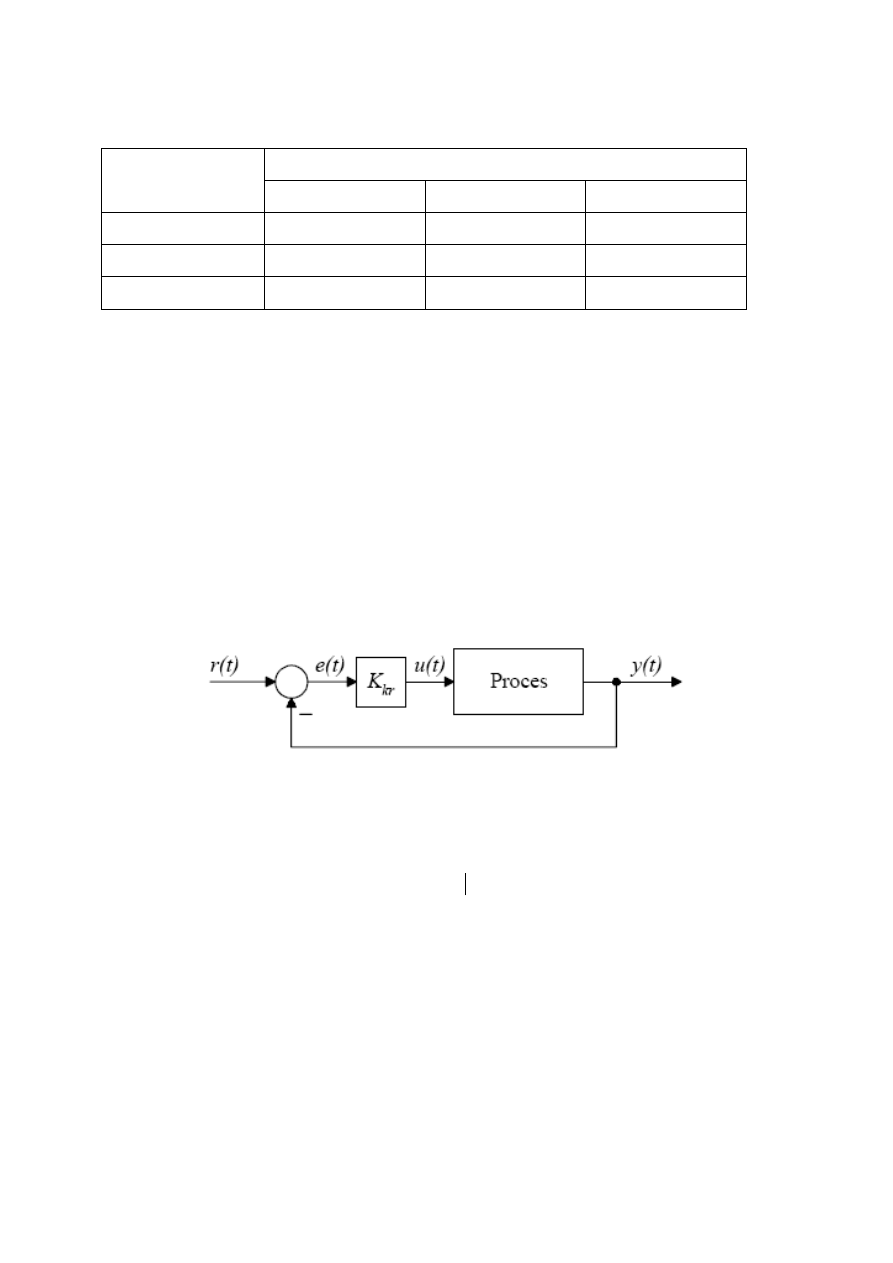
krytycznemu K (rys. 3) i oscylacjom o okresie T (rys. 4). Okres oscylacji powinien być
mierzony kiedy amplituda oscylacji jest dość mała. Dobór nastaw odbywa się według tab. 2.
kr
osc
Rys. 3. Schemat blokowy układu do wyznaczenia wzmocnienia krytycznego i okresu oscylacji
Wzmocnienie statyczne dla pętli otwartej układu:
0
)
(
0
=
=
s
s
GH
K
.
(1.21)
Metoda strojenia bazująca na wzmocnieniu krytycznym daje dobre rezultaty gdy spełniony
jest warunek:
2<
<20, (1.22)
kr
K
K
0
gdzie:
K – wzmocnienie krytyczne,
kr
0
K – wzmocnienie statyczne.
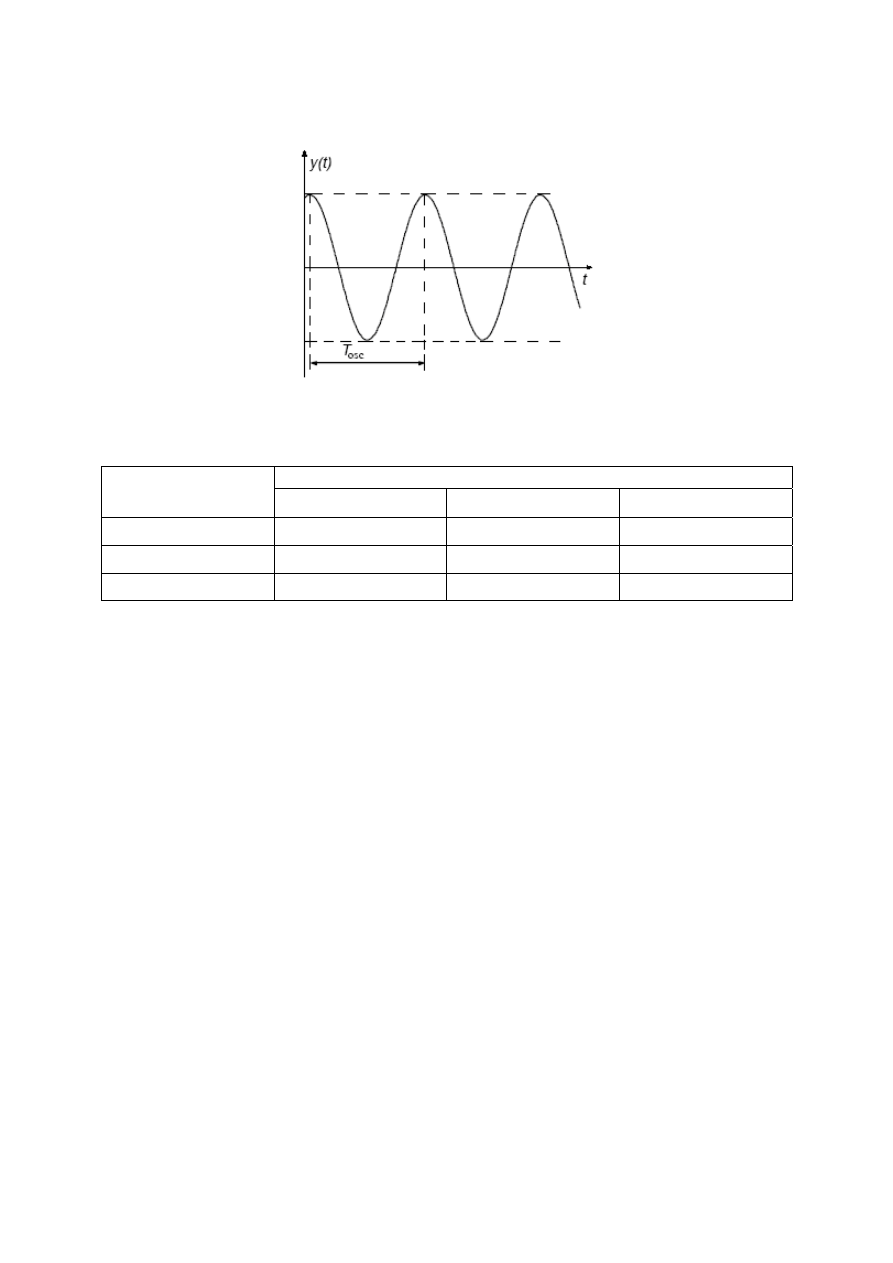
Odpowiedź układu zamkniętego zawiera oscylacje.
Rys. 4. Układ na granicy stabilności
Tab. 2. Strojenie parametrów regulatora metodą bazującą na granicy stabilności układu.
Optymalne wzmocnienia
Typ regulatora
p
K
i
T
D
T
P
kr
K
5
.
0
- -
PI
kr
K
45
.
0
2
.
1
/
osc
T
-
PID
kr
K
6
.
0
2
8
/
osc
T
/
osc
T
Metody strojenia Zieglera-Nicholsa dają odpowiedzi, w których występują oscylacje i
powinny być jeszcze dostrajane ręcznie
4. Zasada działania ogniwa Peltiera
Działanie półprzewodnikowych modułów termoelektrycznych, potocznie nazywanych
ogniwami Peltiera w rzeczywistości opiera się na pięciu podstawowych zjawiskach
fizycznych. Najważniejszym z nich jest zjawisko Peltiera. W roku 1834 Jean C. A. Peltier
odkrył, że na złączu dwóch różnych metali przy przepływie prądu w odpowiednim kierunku
złącze wydziela ciepło do otoczenia, a przy przepływie prądu w odwrotnym kierunku złącze
pobiera ciepło z otoczenia. Na rys. 5 przedstawiono zjawisko Peltiera.
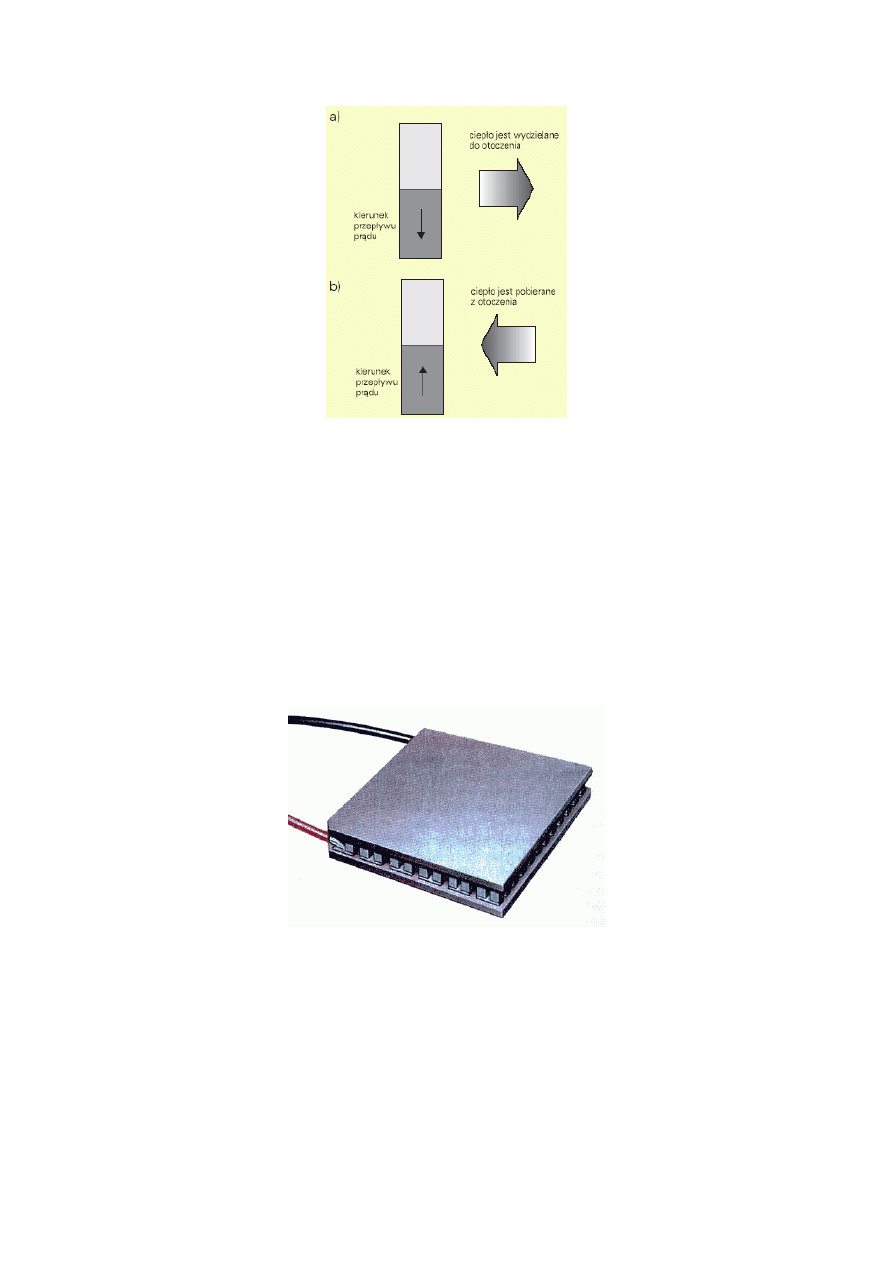
Rys. 5. Zjawisko Peltiera
Ilość wydzielanego lub pochłanianego ciepła jest proporcjonalna do natężenia prądu,
oraz zależy od zastosowanych materiałów. W przypadku złącza wykonanego z dwóch
różnych metali ilość ciepła jest bardzo mała, dlatego w praktycznych zastosowaniach
wykorzystuje się inne materiały. Są to pewnego rodzaju półprzewodniki, zazwyczaj
odpowiednio domieszkowane - tellurek bizmutu (Bi
2
Te
3
). Materiał ten ma interesujące
właściwości nieporównywalnie lepsze od metali, jednak mimo wszystko, ilość ciepła
wydzielanego lub pochłanianego na pojedynczym złączu, nie jest duża. Aby zwiększyć moc
cieplną trzeba albo radykalnie zwiększyć natężenie prądu (co napotyka na pewne
ograniczenia), albo zastosować większą ilość takich ogniw. W praktyce stosuje się właśnie
połączenie większej liczby elementarnych ogniw. Na rys. 6 przedstawiono moduł Peltiera.
Rys. 6. Widok ogólny ogniwa Peltiera
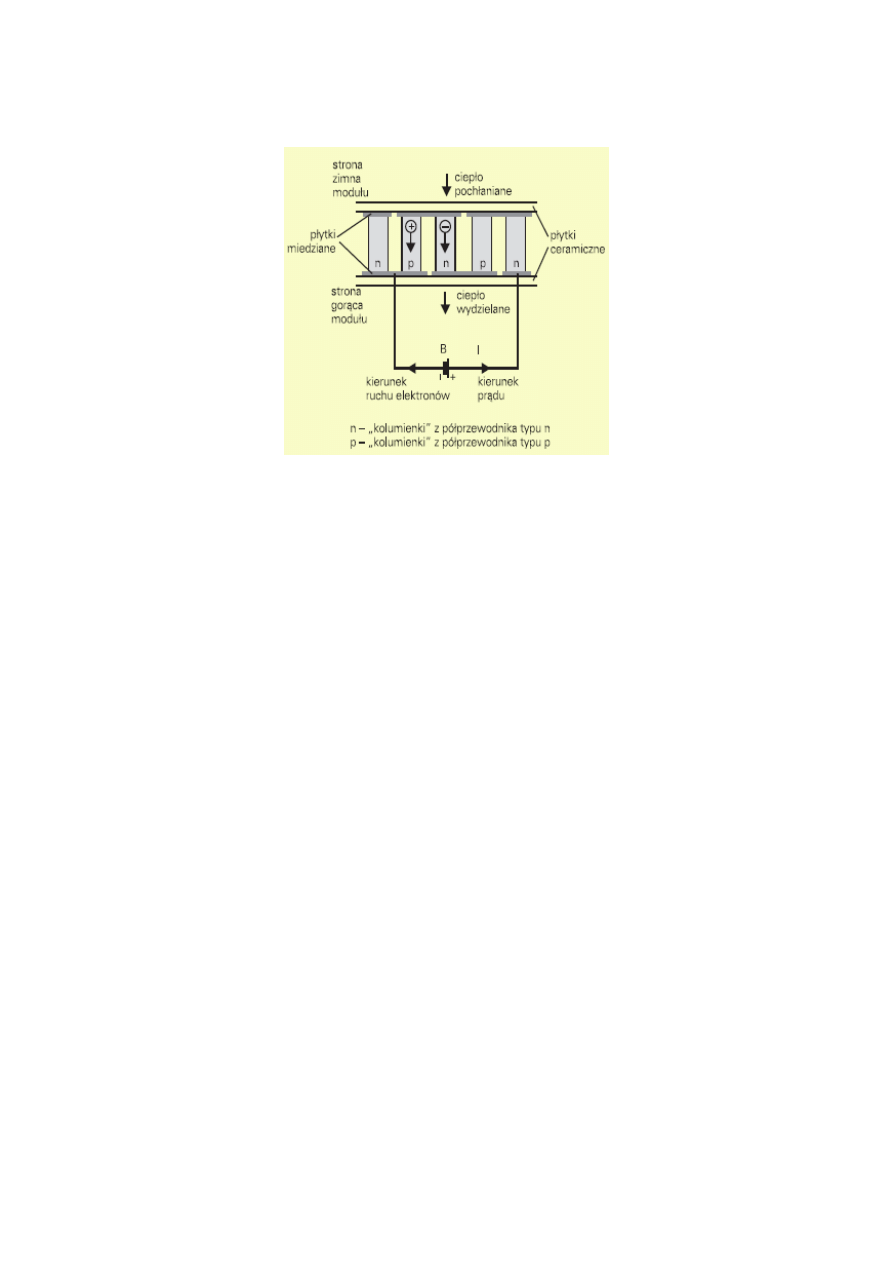
Na rys. 7 przedstawiono zasadę działania modułu Peltiera.
Rys. 7. Zasada działania modułu Peltiera
Moduł ma dwie płytki ceramiczne, tworzące dwie płaszczyzny. Pomiędzy nimi umieszczono
wiele kolumn. Pod względem elektrycznym kolumny te połączone są szeregowo (za pomocą
miedzianych płytek), tworząc zygzak. Pod względem cieplnym kolumny są połączone
równolegle. Płytki ceramiczne zapewniają sztywność mechaniczną, są doskonałą izolacją
elektryczną i dobrze przewodzą ciepło. Podstawą działania modułu Peltiera (rys. 7) jest złącze
p-n. Jedno ze złącz na rys. 7 zostało wyróżnione. Pokazano kierunek przepływu prądu, który
jest przeciwny ruchowi elektronów. W półprzewodniku typu
p nośnikiem prądu są dziury.
Dziury nie są realnymi obiektami fizycznymi - w strukturze półprzewodnika brakuje po
prostu elektronów do pełnego obsadzenia górnego poziomu (pasma) energetycznego, lub
ostatniej orbity elektronowej. W półprzewodniku typu n występuje nadmiar elektronów.
Wspomniane wcześniej pasmo energetyczne jest całkowicie zapełnione i nadmiarowe
elektrony znajdują się z konieczności już w następnym paśmie energetycznym. Elektron
będący na orbicie ma energię potencjalną, zależną od odległości od jądra. Czym wyższa
orbita, tym energia jest większa. Przechodząc z wyższej orbity na niższą, elektron oddaje
energię, natomiast żeby przejść na orbitę wyższą, musi skądś pobrać energię. W ogniwie
Peltiera z rys. 7 występuje następująca sytuacja. Elektrony o niższej energii z półprzewodnika
typu p przechodzą do półprzewodnika typu n, gdzie z konieczności muszą mieć wyższą
energię. Elektrony te muszą zwiększyć swoją energię. Pobierają ją w postaci ciepła. Tym
samym złącze p-n pochłania ciepło z otoczenia. Górna płytka modułu będzie więc chłodzona.
W module Peltiera występuje nie jedno lecz wiele takich złącz. W sąsiedztwie górnej płytki,
przy podanym kierunku prądu, występują złącza p-n, (rys. 6) natomiast przy dolnej płytce
występuje taka sama ilość złącz
n-p. Zgodnie z podaną wcześniej zasadą, elektrony z pasma
przewodzenia półprzewodnika typu
n, przechodząc do niższego pasma walencyjnego
półprzewodnika typu
p, oddając cześć swojej energii w postaci energii cieplnej. Na złączu n-p
wydziela się pewna ilość ciepła, czyli dolna strona modułu jest ogrzewana. Przy zmianie
kierunku prądu, dotychczasowe złącza p-n staną się złączami n-p (i na odwrót). Ciepło będzie
pobierane na dolnej stronie modułu, a wydzielane na górnej.
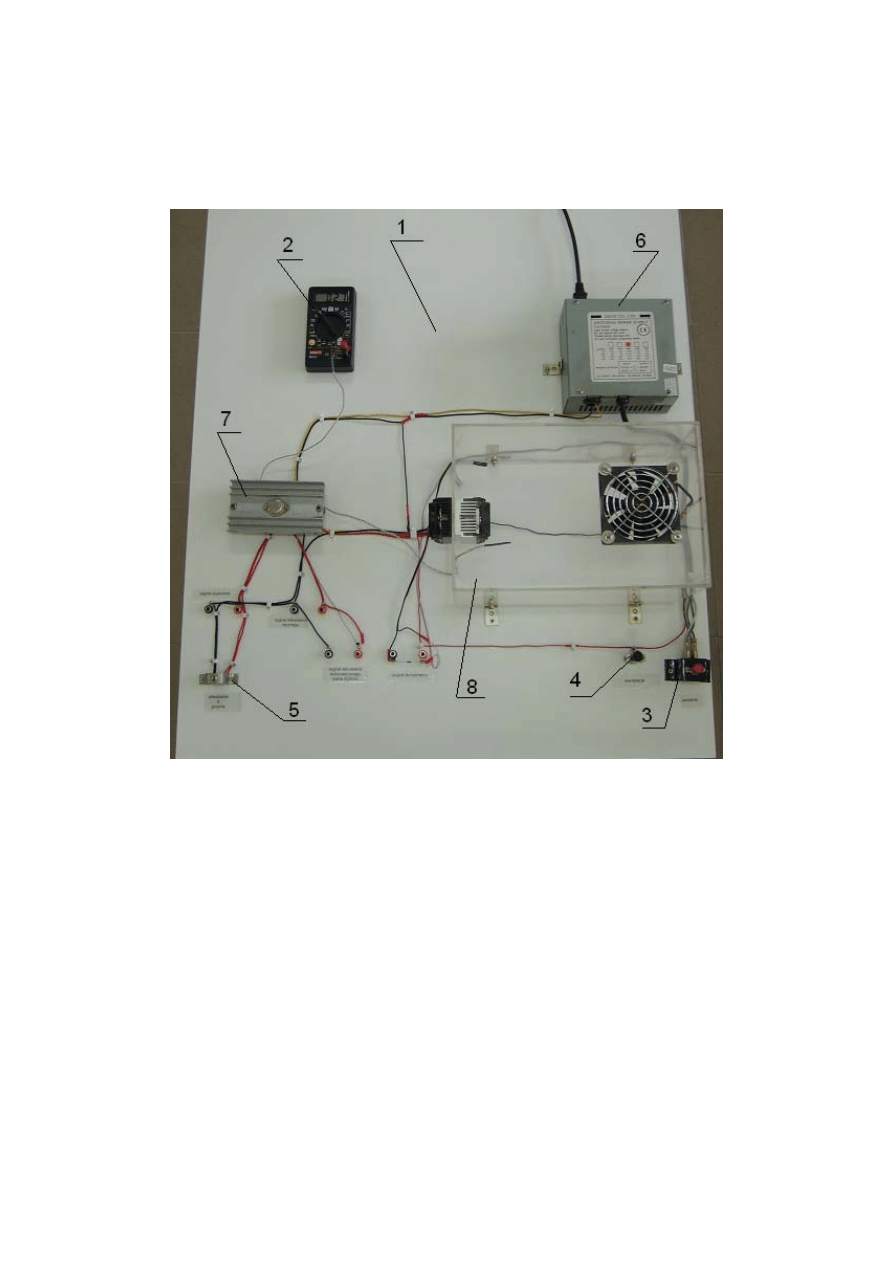
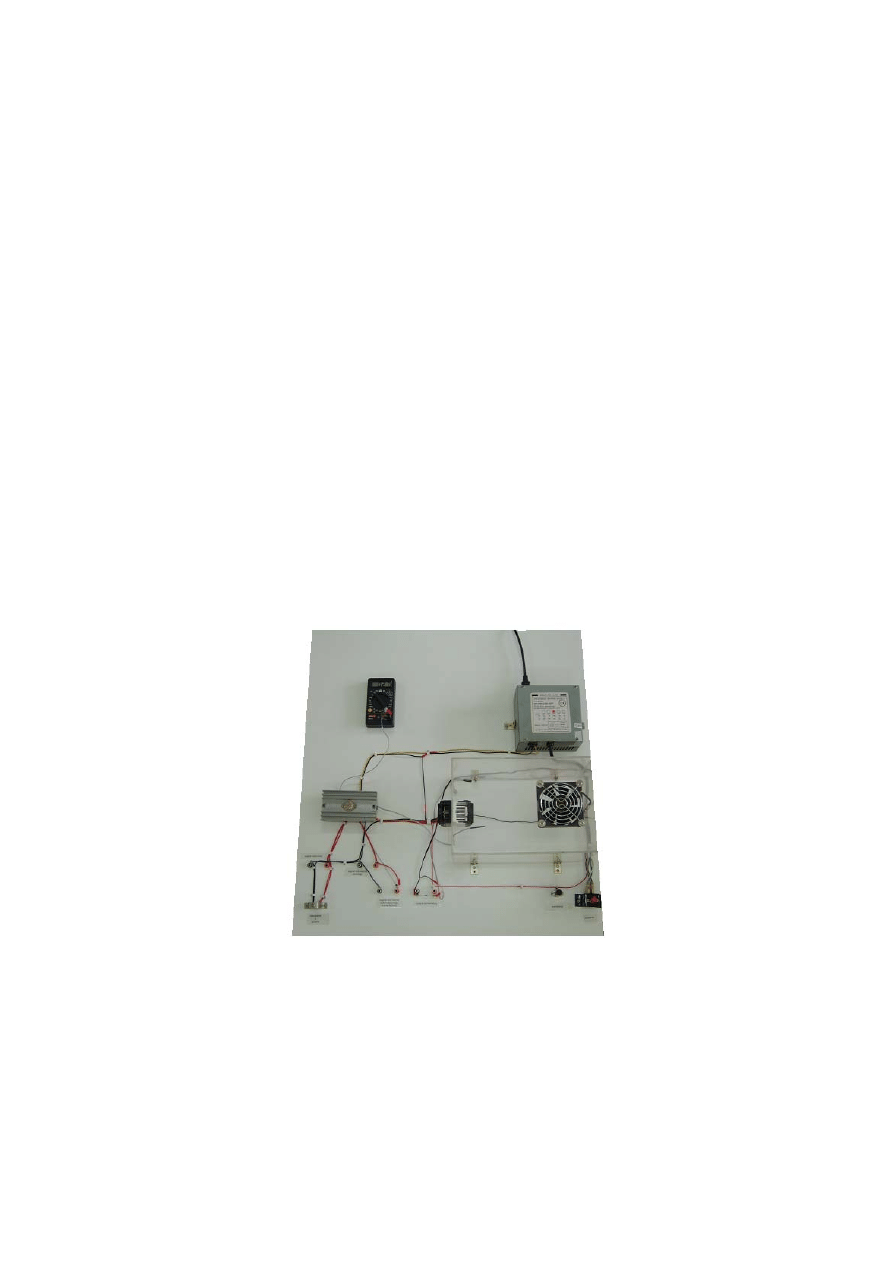
5. Budowa i opis stanowiska laboratoryjnego
Stanowisko przedstawione na rys. 8 przeznaczone jest do automatycznej regulacji
temperatury w modelu pomieszczenia.
Rys. 8. Schemat stanowiska badawczego
Spis elementów:
1 - płyta montażowa,
2 - miernik temperatury,
3 - włącznik zasilania,
4 - włącznik wentylacji,
5 - przełącznik grzania – chłodzenia,
6 - zasilacz ATX (12V),
7 - wzmacniacz mocy – wtórnik emiterowy
8 - model pomieszczenia zamkniętego, z modułem Peltiera.
Do automatycznej regulacji temperatury i akwizycji danych pomiarowych ze
stanowiska badawczego służy system czasu rzeczywistego Real-Time Windows Target
pakietu Matlab-Simulink. Program
Real-Time Windows Target umożliwia uruchamianie w
czasie rzeczywistym prostych modeli zbudowanych w Matlab’ie-Simulink’u na komputerze
klasy PC oraz komunikację poprzez karty wejść/wyjść analogowych. Program
xPC Target
służy do szybkiego prototypowania i symulacji
hardware-in-the-loop. xPC Target daje
podobne możliwości jak
Real-Time Windows Target, lecz można sterować bardziej
skomplikowanymi modelami np.
regulatorami rozmytymi w czasie rzeczywistym.
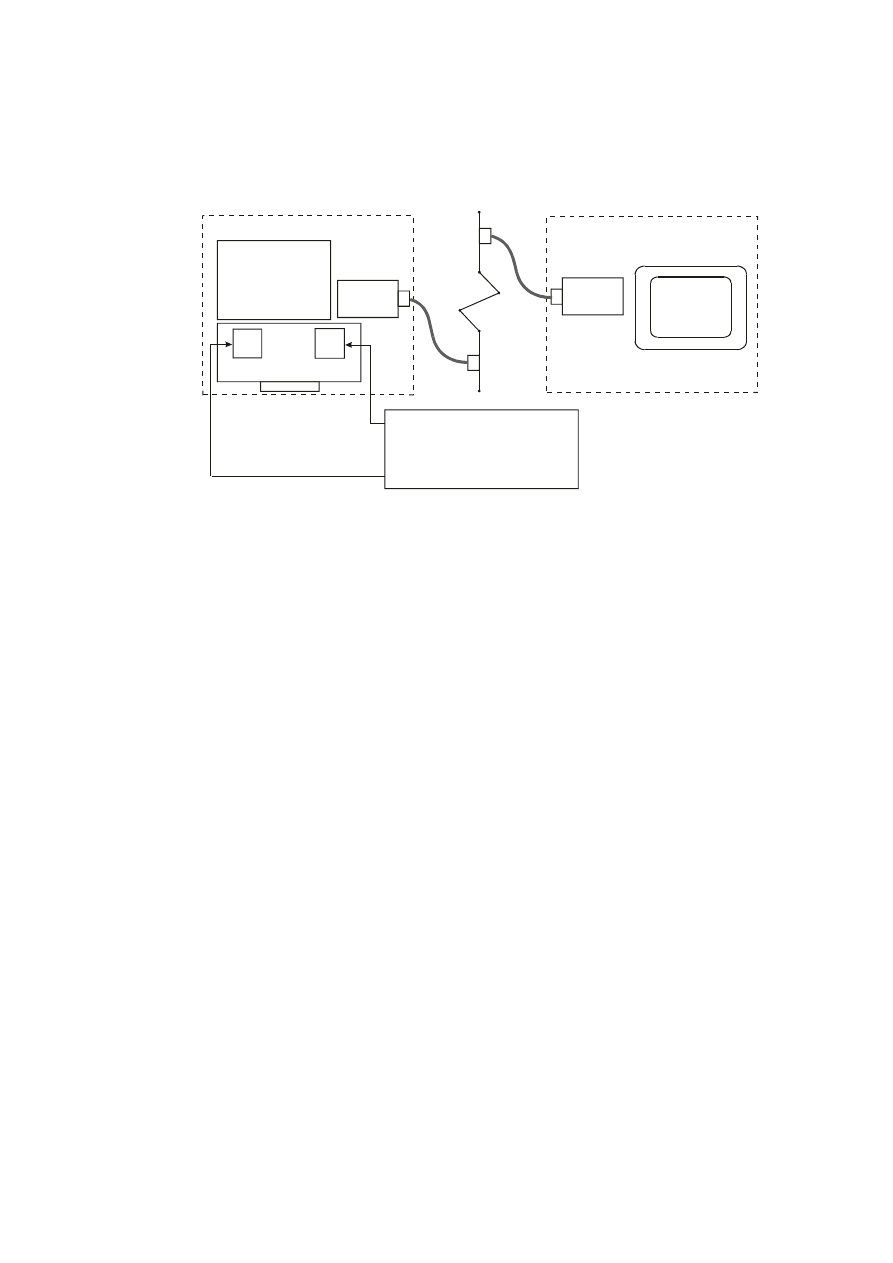
Do działania xPC Target’a wymagane są dwa komputery klasy PC. Na rys. 9 przedstawiono
schemat działania programu
xPC Target z obiektem fizycznym.
A/D
D/A
Target PC
Host PC
Kart a
sieciowa
Kart a
sieciowa
PCI-DAS1602/16
Obiekt
fizyczny
wejście
MATLAB
Simulink
xPC Target
wyjście
Algoryt m
st erowania
Rys. 9. Schemat działania xPC Target z obiektem fizycznym
W komputerze oznaczonym na schemacie jako
Host zainstalowano oprogramowanie
MATLAB-Simulink oraz
xPC Traget, który służy do szybkiego prototypowania i sterowania
w
czasie rzeczywistym. Komputer
Target posiada zainstalowaną kartę wejść/wyjść
analogowych oraz system
Real-Time xPC Target, który akwizuje dane pomiarowe i steruje
serwonapędem elektropneumatycznym. Komputery
Host i Target komunikują się za pomocą
protokołu TCP/IP.
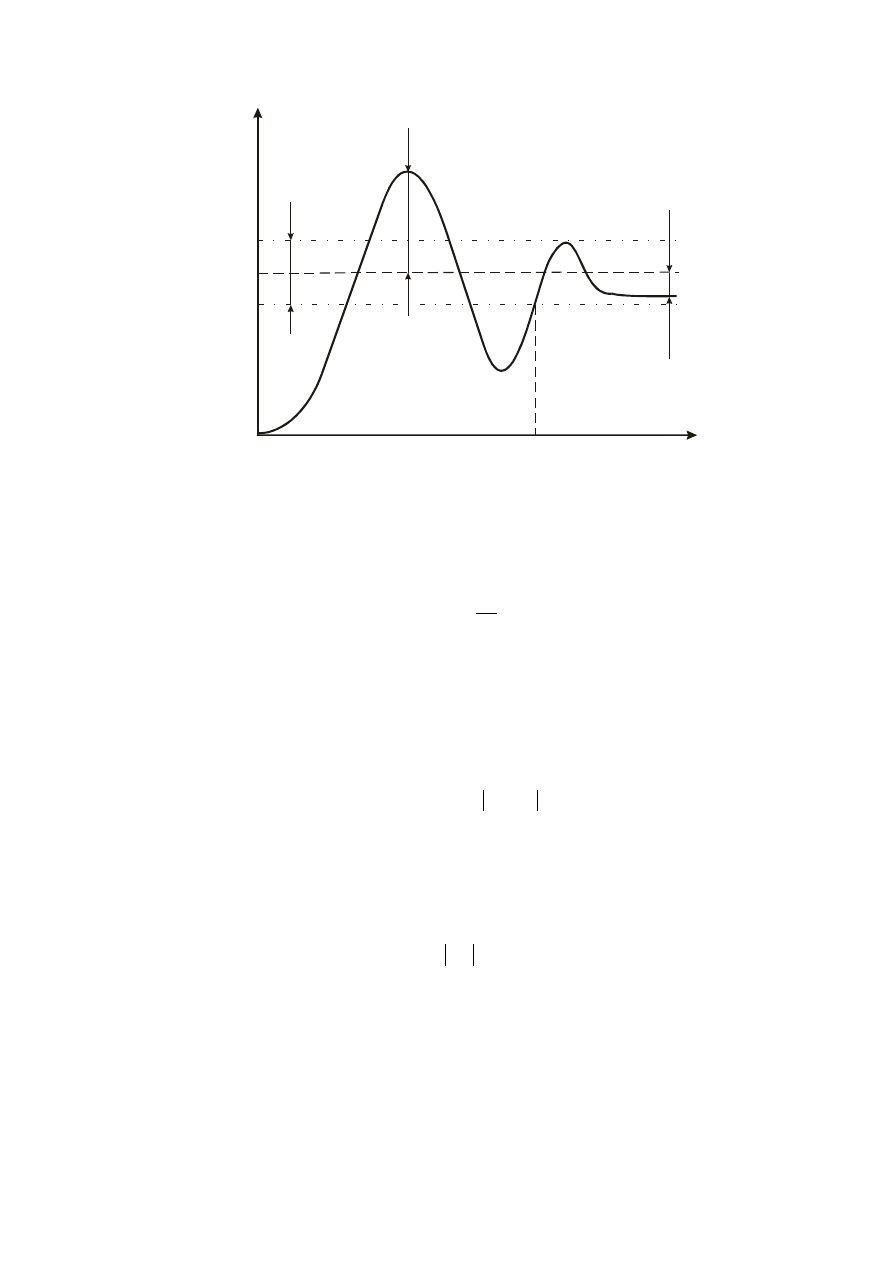
6. Ocena jakości regulacji
Proces regulacji ocenia się przy pomocy parametrów charakteryzujących wartości
użytkowe zastosowanych algorytmów regulacji. Jakość regulacji może być oceniana na
podstawie różnych kryteriów. Najczęściej w praktyce stosuje się nie jedno lecz kilka
kryteriów jednocześnie. Na rys. 10 przedstawiono interpretację graficzną podstawowych
wskaźników jakości regulacji.
Czas t
S
yg
na
ł r
eg
ul
ow
an
y
y(
t)
x(t )
e
st
2
δ
t
r
e
m
Rys. 10. Interpretacja graficzna podstawowych wskaźników jakości regulacji
• przeregulowanie
δ
p
x
e
m
p
=
δ
(14)
Dla układu regulacji podaje się dopuszczalną wartość przeregulowania
δ
p
oraz założoną
odchyłkę statyczną 2
δ.
• czas regulacji t
r
Przy założonym przeregulowaniu żąda się aby czas regulacji był jak najkrótszy.
• błąd dynamiczny (uchyb regulacji) e(t)
x
t
y
t
e
−
=
)
(
)
(
(15)
Przed układem regulacji stawia się określone wymagania dotyczące przebiegu przejściowego
sygnału uchybu
e(t) czyli określonych właściwości dynamicznych oraz wartości w stanie
ustalonym
e
st
czyli właściwości statycznych,
• błąd statyczny (uchyb statyczny) e
st
)
(
lim t
e
e
t
st
∞
→
=
(16)
Błąd regulacji
e
st
powstaje w układzie albo po zmianie wartości zadanej
y
0
, albo po
zmianie jednego z zakłóceń, które może potencjalnie oddziaływać na układ, albo
jednocześnie z dwóch wyżej wymienionych powodów,
• warunek stabilności ruchu
Ogólnie warunek stabilności ruchu definiuje się następująco: jeżeli istnieje określony przy
danych warunkach początkowych ruch i przy małej zmianie warunków początkowych lub też
po zadziałaniu małych zakłóceń (sił) ruch po zmianie będzie mało różnił się od ruchu bez
zakłóceń, to mówimy że ruch jest stabilny. Jeżeli zaś małe zmiany warunków początkowych
lub małe zakłócenia spowodują radykalną zmianę ruchu, to ruch jest niestabilny [6, 7, 9, 100].
Stabilność ruchu jest bardzo ważnym zagadnieniem. Układy mechaniczne będące
w ruchu są poddawane przypadkowym czy ciągle działającym zakłóceniom. Istotne jest czy
takie zaburzenia nie spowodują radykalnej zmiany ruchu.
Załóżmy, że ruch badanego układu jest opisany
n równaniami różniczkowymi
zwyczajnymi I rzędu o postaci:
⎟
⎠
⎞
⎜
⎝
⎛
=
n
i
i
x
x
X
dt
dx
,
...
,
1
(17)
gdzie
i=1, ..., n.
Niech
x
i
będzie pewnym rozwiązaniem dla warunków początkowych
t=t
0
:
( )
0
0
i
i
x
t
x
=
(18)
Dodatkowo niech
i
x~ odpowiada zmienionym warunkom początkowym:
( )
0
0
~
~
i
i
x
t
x
=
(19)
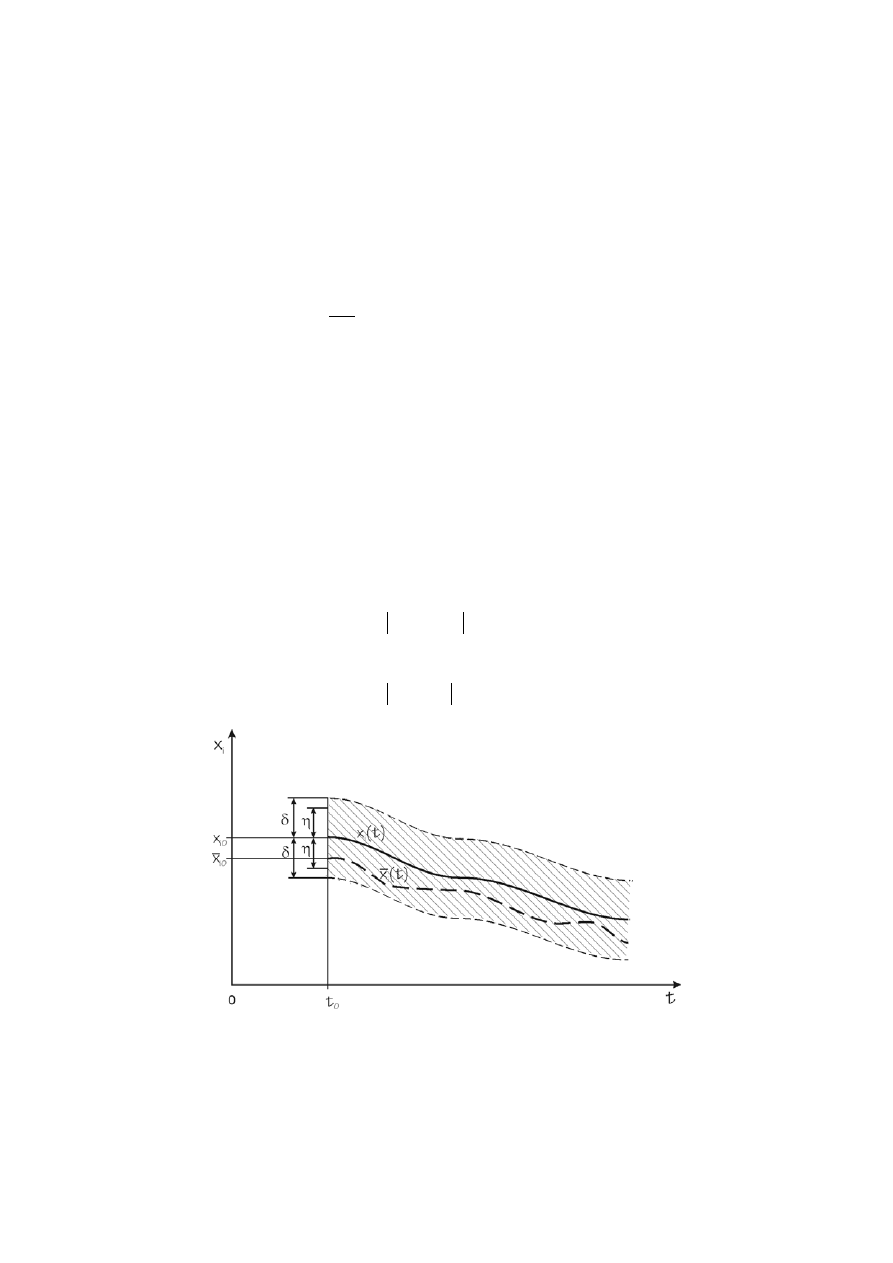
Ruch nazywamy stabilnym,
jeżeli dla każdego
δ>0 istnieje takie η>0, że jeżeli
( )
η
<
−
0
0
~
i
i
x
t
x
,
(20)
to
( )
δ
<
−
i
i
x
t
x
~
(21)
Rys. 11. Interpretacja graficzna warunku stabilności ruchu
Na rys. 11 przedstawiono interpretację graficzną tego warunku stabilności ruchu. Linią ciągłą
zaznaczono rozwiązanie
x
i
(t). Liniami przerywanymi zaznaczono założoną odchyłkę
statyczną
2
δ
, natomiast grubą linią przerywaną zaznaczono rozwiązanie )
(
~ t
x
i
. Ruch opisany
równaniem
x
i
(t) jest stabilny jeśli rozwiązanie )
(
~ t
x
i
spełniające warunek (21) nie wykroczy
poza zakreskowane pole (linie oznaczające założoną odchyłkę statyczną
2
δ
).
• całka z bezwzględnej wartości uchybu (zmodyfikowane kryterium Sartoriusa) IAE
(
Integral of Absolute Error)
∫
∞
=
0
)
( dt
t
e
IAE
(22)
Najprostsze całkowe kryterium jakości regulacji.
• całka z kwadratu błędu regulacji ISE (Integral of Square Error)
∫
∞
=
0
2
)
( dt
t
e
ISE
(23)
Często stosowane kryterium, gdyż możliwe jest jego analityczne obliczenie dla wielu
prostych i średnio skomplikowanych układów regulacji. Pewną wadą tego kryterium jest
pomniejszanie znaczenia małych błędów i powiększania znaczenia dużych, z tego względu
kryterium ISE daje bardziej obiektywny obraz rzeczywistości. Układ regulacji
optymalizowany za pomocą kryterium kwadratowego może wykazywać mały, wolno
zanikający błąd regulacji.
• całka z iloczynu czasu i błędu regulacji ITAE (Integral of Time and Absolut Error)
∫
∞
=
0
)
( dt
t
e
t
ITAE
(24)
Optymalizację przy pomocy tego kryterium stosuje się aby uzyskać układ regulacji, w którym
zanikanie błędu jest szybsze.
• całka z iloczynu czasu i kwadratu błędu regulacji ITSE (Integral of Time and Square
Error)
∫
∞
=
0
2
)
( dt
t
te
ITSE
(25)
Kryterium podobnie jak ITAE wykazujące szybkie zanikanie błędu.
• całka z kwadratu sygnału sterowania ISC (Integral of Square Control)
∫
∞
=
0
2
)
( dt
t
u
ISC
(26)
W układach regulacji dąży się także do minimalizacji kosztów sterowania sygnału
u(t).
7. Zadanie laboratoryjne
Do automatycznej regulacji temperatury i akwizycji danych pomiarowych ze
stanowiska badawczego służy system czasu rzeczywistego
xPC Target pakietu Matlab-
Simulink z użyciem 16 bitowej karty AD/DA PCI-DAS 1602/16 firmy Measurment
Computing (rys. 12.) o szesnastu wejściach analogowych i dwóch wyjściach analogowych..
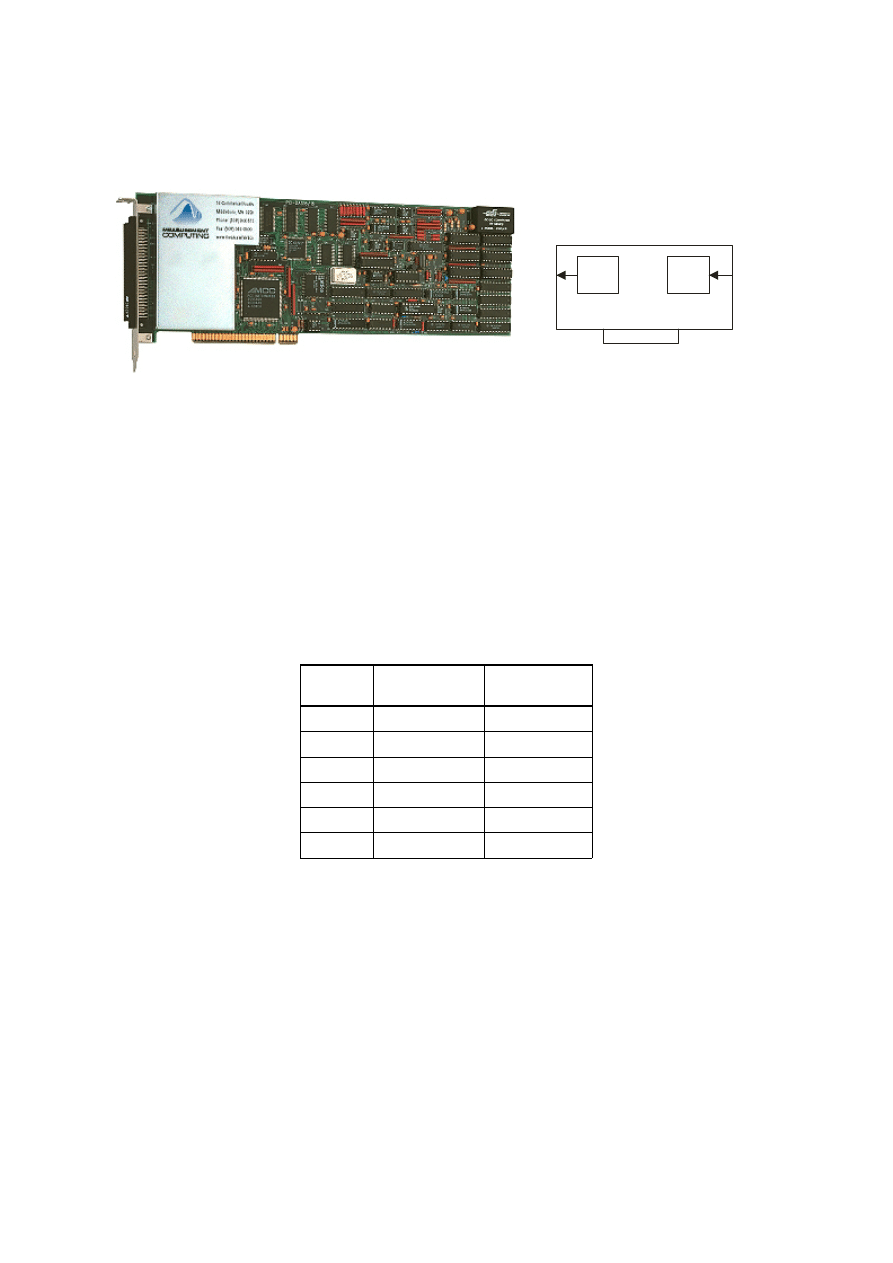
Dane pomiarowe można również rejestrować przy pomocy wbudowanych przyrządów
pomiarowych
a) b)
D/A
A/D
PCI-DAS1602/16
Rys. 12. Karta AD/DA PCI-DAS 1602/16: a) widok ogólny, b) symbol graficzny
Pierwszym etapem badań jest skalibrowanie czujnika temperatury, czyli wyznaczenie
charakterystyki
T=f(U). W celu wyznaczenia charakterystyki T=f(U) należy:
-
przy pomocy zewnętrznego źródła stałonapięciowego podać na wejście wtórnika
emiterowego napięcie o wartości ok. 12V,
-
odczytywać temperaturę w modelu pomieszczenia oraz napięcie czujnika temperatury
co 1
o
C,
-
uzyskane wyniki zapisać w tab. 3,
- wyznaczyć charakterystykę
T=f(U) czujnika temperatury.
Tab. 3. Zestawienie wyników pomiarów charakterystyki T=f(U)
Lp. T
[
o
C] U[V]
1
2
3
4
5
6
Kolejnym krokiem jest wyznaczenie charakterystyki skokowej
U=f(t). W tym celu należy:
- ze
względu na korzystanie z zaawansowanej aparatury naukowo-badawczej
postępować ściśle według wskazówek prowadzącego,
- zbudować model Simulinka według schematu z rys. 13,
- ustalić czas próbkowania
T
=
0,01 s,
- skompilować schemat i wysłać na komputer
Target, przystąpić do pomiarów,
- zapisać wygenerowaną charakterystykę skokową oraz dane pomiarowe,
- wyznaczyć parametry
k, T, T
o
, R, a,
- wyznaczyć współczynniki:
, ,
według tab. 2,
p
k
i
T
d
T
-
uzyskane wyniki zapisać w tab. 3.
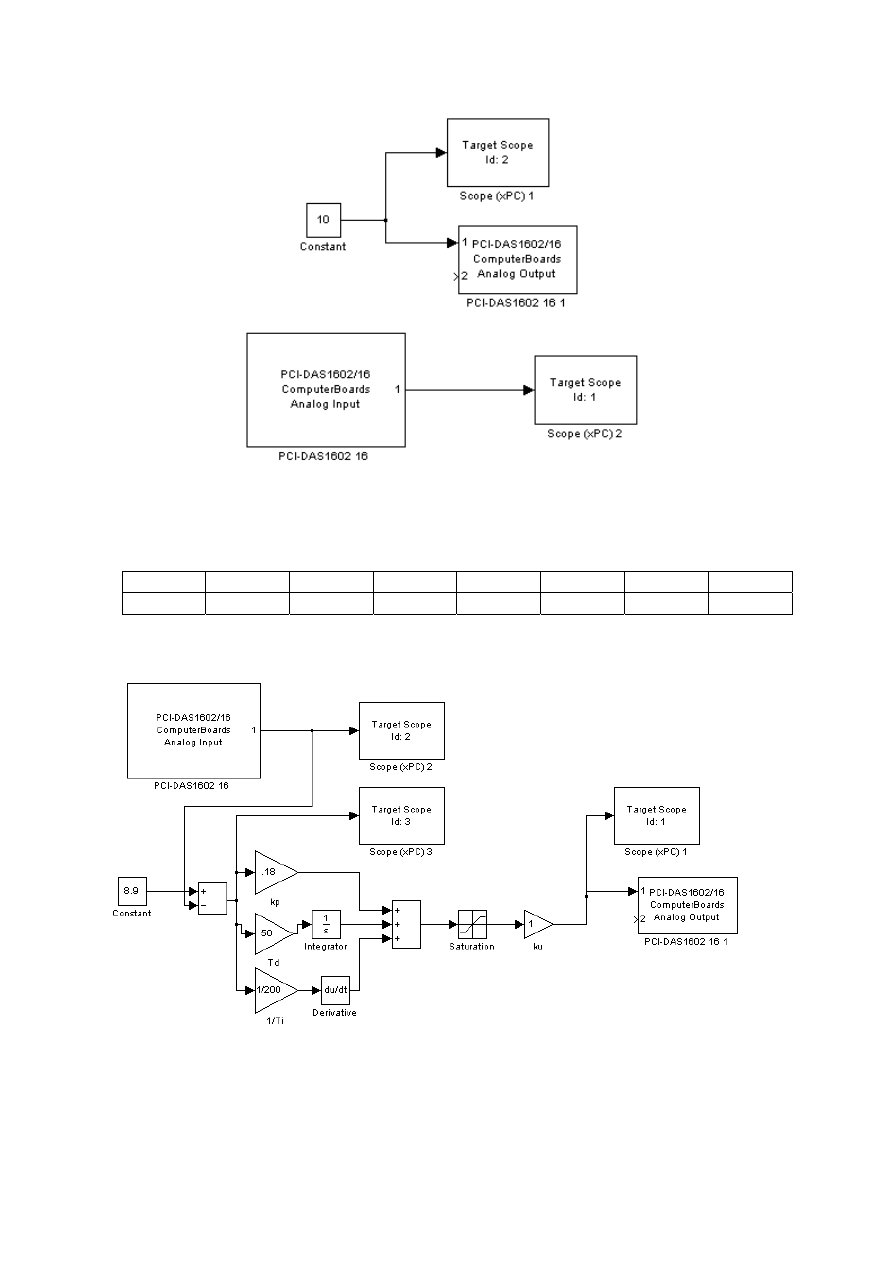
Rys. 13. Model Simulinka
Tab. 3. Zestawienie wyników pomiarów charakterystyki T=f(U)
k T T
0
R a k
p
T
i
T
d
Po obliczeniu współczynników regulatora PID zbudować układ według schematu (rys. 12).
Rys. 14. Schemat automatycznej regulacji temperatury z regulatorem PID
- wykonać badania automatycznej regulacji temperatury w modelu pomieszczenia dla
dwóch wybranych stałych temperatur np. 27
o
C i 31
o
C,
- obliczyć wskaźniki jakości regulacji wskazane przez prowadzącego,
-
uzyskane wyniki zapisać w tab. 4,
-
na jednym rysunku wykonać wykresy wymuszenia, odpowiedzi, uchybu regulacji,
sygnału sterującego,
- zmodyfikować schemat z rys. 14 na działanie regulatora P lub PI,
- wykonać badania automatycznej regulacji temperatury w modelu pomieszczenia dla
takich samych temperatur,
-
na jednym rysunku wykonać wykresy wymuszenia, odpowiedzi, uchybu regulacji,
sygnału sterującego,
- porównać wskaźniki jakości regulacji wszystkich analizowanych regulatorów.
Tab. 4. Zestawienie wskaźników jakości regulacji
P
δ
p
e
st
IAE ISE ITAE
ITSE ISC
PI
PID
Document Outline
- LABORATORIUM PODSTAW AUTOMATYKI
- Rys. 11. Interpretacja graficzna warunku stabilności ruchu
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron