1
00506 Dynamika D
TEORIA
00506
Podstawy dynamiki D
Część 2
Siły kontaktowe.
Zasada zachowania pędu.
Ruch po równi pochyłej.
Dynamika ruchu po okręgu.
Instrukcja dla zdającego
1.
Proszę sprawdzić, czy arkusz teoretyczny zawiera 10
stron. Ewentualny brak należy zgłosić.
2.
Do arkusza może być dołączona karta wzorów i sta-
łych fizycznych. Jeśli jest, należy ją dołączyć do od-
dawanej pracy.
3.
Proszę uważnie i ze zrozumieniem przeczytać zawar-
tość arkusza.
4.
Proszę precyzyjnie wykonywać polecenia zawarte w
arkuszu: rozwiązać przykładowe zadania, wyprowa-
dzić wzory, gdy jest takie polecenie.
5.
Proszę analizować wszelkie wykresy i rysunki pod
kątem ich zrozumienia.
6.
W trakcie obliczeń można korzystać z kalkulatora.
7.
Wszelkie fragmenty trudniejsze proszę zaznaczyć w
celu ich późniejszego przedyskutowania.
8.
Uzupełniaj wiadomości zawarte w arkuszu o informa-
cje zawarte w Internecie i dostępnej ci literaturze.
9.
Znak * dotyczy wiadomości wykraczających poza
ramy programu „maturalnego”.
ś
yczymy powodzenia!
(Wpisuje zdający przed rozpoczęciem pracy)
PESEL ZDAJĄCEGO
Aktualizacja
Maj
ROK 2008
Dane osobowe właściciela arkusza
2
00506 Dynamika D
TEORIA
Temat: 25
Siły kontaktowe i tarcie.
1.
Gdy dwa ciała są dociskane do siebie (np. blok dociskany do nieruchomej ściany), występują wte-
dy siły kontaktowe. Nie tylko siła, której przyczyną jest blok, działa na ścianę, lecz również,
zgodnie z III zasadą dynamiki, na blok działa siła, której przyczyną jest ściana. Ostatecznym źró-
dłem tych dwóch sił jest siła odpychająca działająca między atomami. Gdy chmury elektronowe
dwóch atomów zaczynają się pokrywać występuje między nimi siła odpychania, która rośnie w
miarę jak atomy zbliżają się do siebie Ta siła odpychająca między atomami ma pochodzenie elek-
tromagnetyczne i może być bardzo duża w porównaniu z siłami grawitacyjnymi. Gdy dopychamy
blok do powierzchni ściany, atomy na powierzchni bloku są pchane coraz bliżej atomów po-
wierzchni ściany, aż w końcu mamy wypadkową siłę równą i przeciwnie skierowaną do siły przy-
łożonej. Te siły odpychające, działające między powierzchniami nazywamy siłami kontaktowy-
mi.
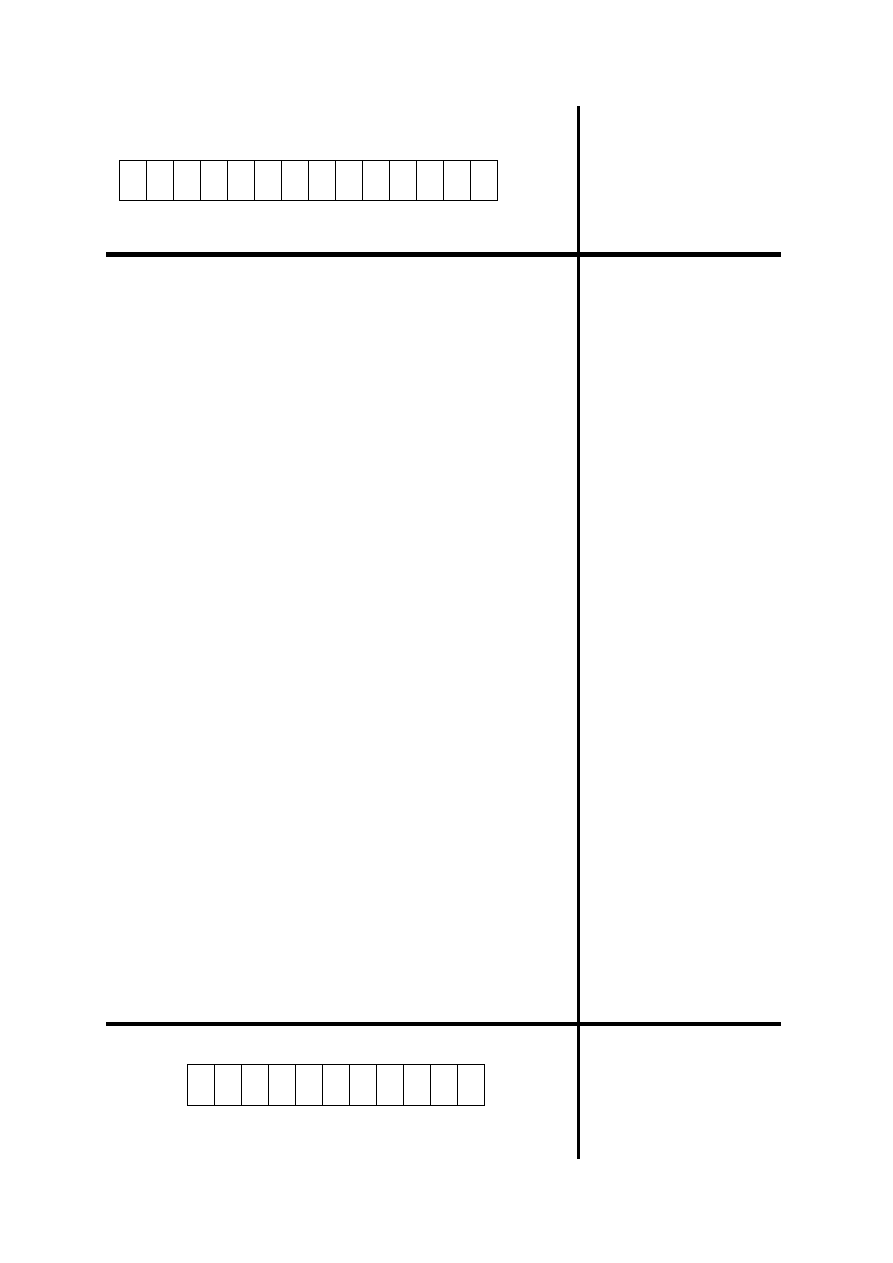
2.
Na rys. 1 blok o masie m jest pchany na ścianę siłą
r
F
. Gdybyśmy na ślepo zastosowali w tej
sytuacji równanie
r
r
F
ma
=
, to otrzymalibyśmy wynik
r
r
a
F
m
=
, co nie równa się zeru. A jednak
blok nie przyspiesza, gdy przykłada się do niego siłę
r
F
! Pełna analiza wykazuje, że atomy ściany
popychają blok z całkowitą siłą kontaktową
r
F
1
, która jest równa -
r
F
.
Rys. 1
r
F
m
Rysunek 1
przedstawia blok
dociskany do
nieruchomej
ś
ciany siłą
r
F
.
Masa bloku wy-
nosi m.
Rysunek 2 poka-
zuje wszystkie Rys. 2
cztery siły dzia-
łające na blok.
r
F
r
F
g
r
F
1
r
F
2
(1)
r
r
r
r
r
F
F
F
F
F
wyp
= +
= − =
1
0
Jeżeli ciążenie pcha blok w dół siłą
r
F
g
, to powstaje druga siła - siła kontaktowa
r
F
2
(przy czym
r
F
2
= -
r
F
g
). Suma wypadkowa jest sumą wszystkich czterech sił (rys. 2).
(2)
r
r
r
r
r
r
r
r
r
F
F
F
F
F
F
F
F
F
wyp
g
g
g
= +
+
+
= + −
+
+ −
=
1
2
0
(
)
(
)
We wszystkich zastosowaniach II zasady dynamiki Newtona jest bardzo istotne żeby policzyć siłę
wypadkową
.
3
00506 Dynamika D
TEORIA
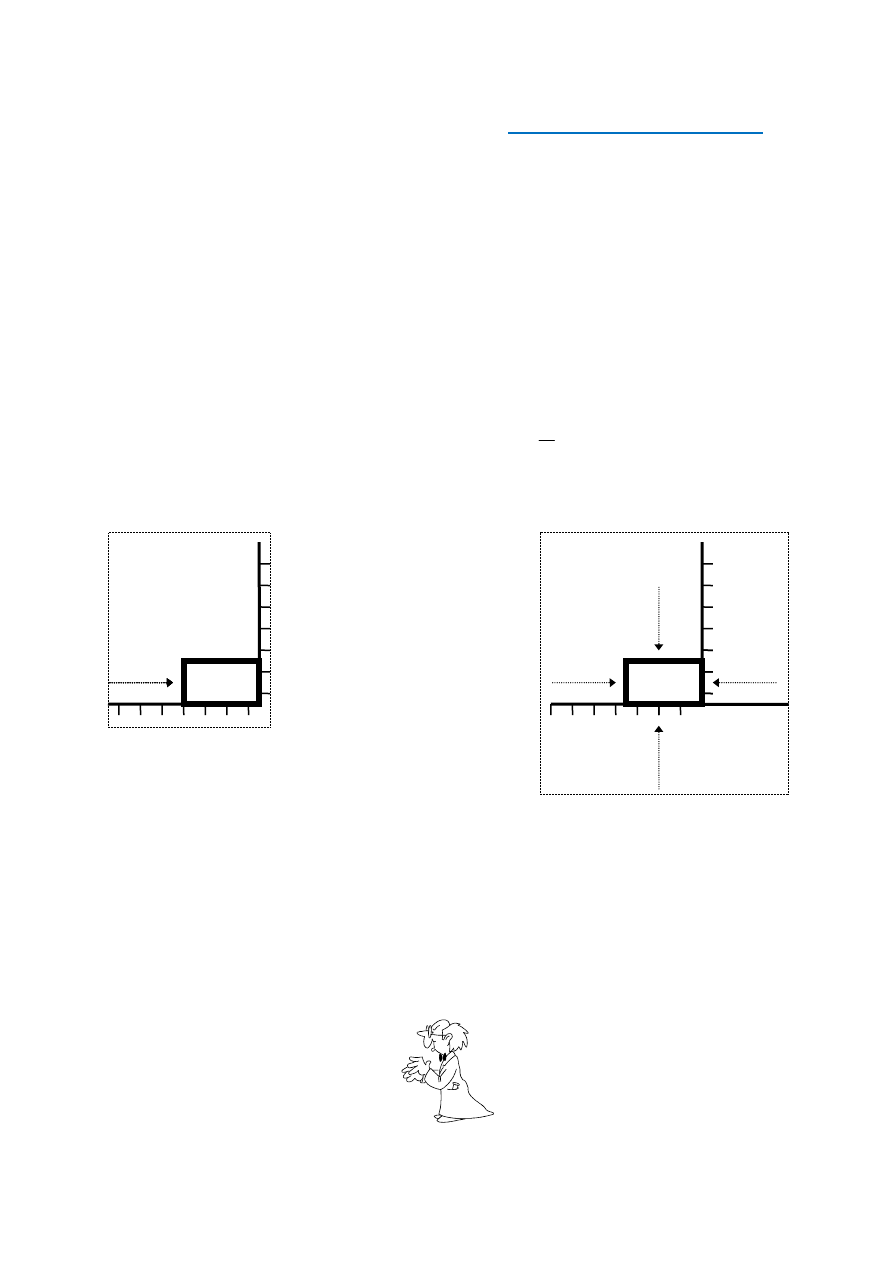
3.
Analizując dalej, zaczniemy doceniać wielką prostotę i piękno zasad Newtona. Musimy jednak
strzec się pułapek, jeżeli chcemy poprawnie stosować te zasady. Niech następujący „paradoks”
będzie ostrzeżeniem. Rozważmy dwa bloki m
A
i m
B
na powierzchni bez tarcia (rys. 3). Do bloku A
przyłożono siłę
r
F
, która przenosi się na blok B. Zgodnie z III zasadą dynamiki blok B działa siłą
równą co do wartości i przeciwnie skierowaną na blok A, czyli siłą -
r
F
. Siła wypadkowa działa-
jąca na blok A jest sumą przyłożonej siły
r
F
i siły kontaktowej -
r
F
, jaką blok B działa na blok
A. W tym wypadku
r
r
r
F
F
F
wyp
= + −
=
(
)
0
. Zgodnie z II zasadą dynamiki:
(3)
r
r
a
F
m
wyp
A
=
=
0
Musimy dojść do wniosku, że bloku A w ogóle nie można poruszyć, bez względu na to, jak
wielka byłaby siła działająca! Spróbuj znaleźć błąd w rozumowaniu !
r
F
m
A
m
B
Rys. 3
4.
Błędem w rozumowaniu zawartym w punkcie 3 jest założenie, że siła
r
F
jest przenoszona przez
blok A i skutkiem tego działa na blok B. Zasady dynamiki nic nie mówią, że tak miałoby być.
Powinno się natomiast przyjąć dowolną wartość siły kontaktowej
r
F
’, jaką blok A działa na blok
B. Masa jest wielkością addytywną, toteż II zasadę dynamiki należy do każdej masy stosować od-
dzielnie:
(4)
(
' )
r
r
r
F
F
m
a
A
−
=
⋅
oraz (5)
r
r
F
m
a
B
'
=
⋅
.
Dodając te równania, otrzymujemy:
(6)
r
r
r
r
F
m
m
a
czyli
a
F
m
m
A
B
A
B
=
+
⋅
=
+
(
)
,
.
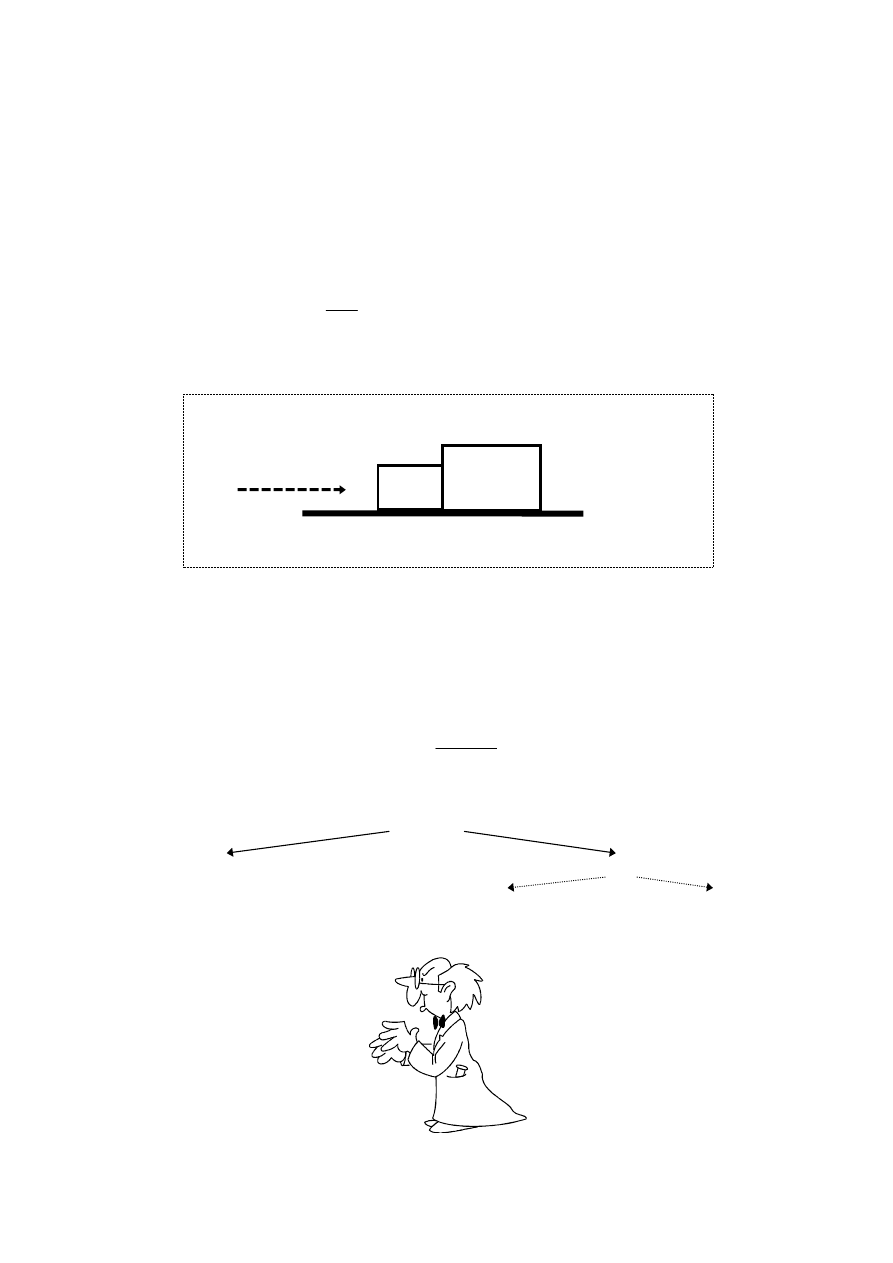
5.
Tarcie. Siła pojawiająca się na styku dwóch powierzchni trących, zwrócona przeciwnie do siły zmierzającej do wza-
jemnego przesunięcia się ciał, nosi nazwę siły tarcia. Poniżej przedstawiono najbardziej ogólną klasyfikację sił tarcia:
Siła tarcia
r
T
siła tarcia statycznego siła tarcia kinetycznego
tarcie toczne tarcie suwne
4
00506 Dynamika D
TEORIA
Temat: 26
Zasada zachowania pędu.
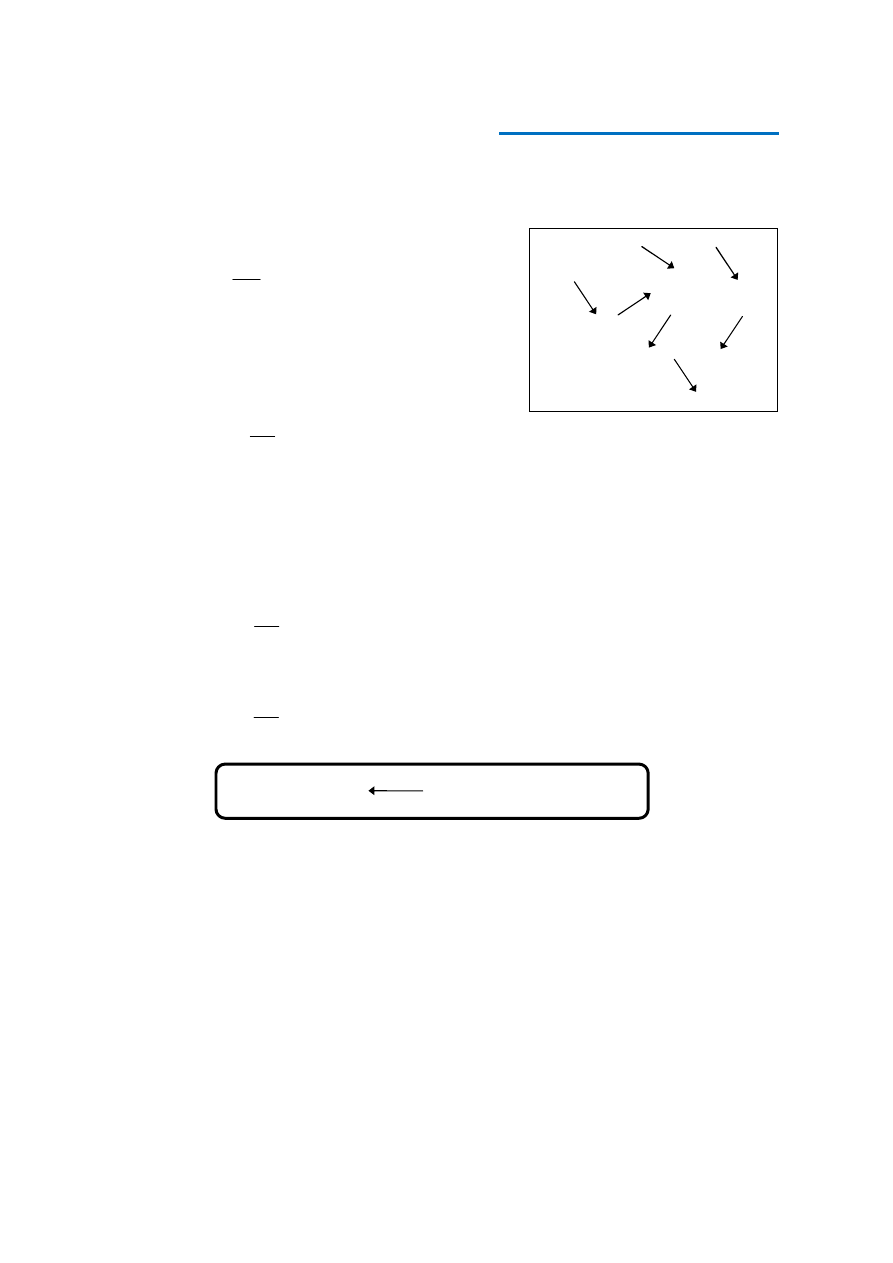
1.
Korzystając z zasad dynamiki można wyprowadzić podstawową zasadę dla układów mecha-
nicznych. W tym celu rozpatrzmy układ złożony z n punktów materialnych (rys. 1). Zapisze-
my teraz równanie wyrażające II zasadę dynamiki dla k-tego punktu materialnego
•
•
(1)
dp
dt
F
F
F
k
k
k
w
k
z
r
r
r
r
=
=
+
,
•
gdzie
r
p
k
oznacza pęd k-tego punktu materialnego.
•
•
k
•
Zsumujemy teraz wyrażenie (1) dla wszystkich punktów
r
p
k
•
układu:
Rys. 1
(2)
dp
dt
F
F
i
i
w
i
n
i
z
i
n
i
n
r
r
r
=
+
=
=
=
∑
∑
∑
1
1
1
.
Z III zasady dynamiki wiemy, że siły występują parami. Rozpatrzmy siły wewnętrzne: jeśli k-ty
punkt działa na punkt i-ty, to punkt i-ty działa na punkt k-ty, przy czym siły wzajemnego ich od-
działywania są takie same co do wartości i przeciwnie skierowane. Zatem, gdy zsumujemy
wszystkie siły wewnętrzne, w sumie tej dla każdej siły składowej wystąpi przeciwnie skierowana
i równa co do wartości niutonowska siła reakcji. *Oznacza to, że suma wszystkich sił wewnętrz-
nych jest dokładnie równa zeru. Mamy zatem:
(3)
dp
dt
F
i
i
z
i
n
i
n
r
r
=
=
=
∑
∑
1
1
.
*Jeśli mamy do czynienia z układem odosobnionym, nie poddanym działaniu sił zewnętrznych,
suma po prawej stronie równania (3) jest równa zeru i wobec tego mamy:
(4)
dp
dt
czyli dp
i
k
i
n
r
r
=
=
=
∑
0
0
1
,
i ostatecznie otrzymujemy
(5)
r
p
const
k
i
n
=
=
∑
.
1
Zasada zachowania pędu
2.
Zatem w układzie odosobnionym, czyli nie poddanym działaniu sił zewnętrznych, całkowity
pęd (równy sumie wektorowej pędów poszczególnych punktów materialnych) zachowuje sta-
łą (niezmienną w czasie) wartość.
3.
Podana w punkcie 2 zasada zachowania pędu odgrywa nie mniej ważną rolę niż zasada za-
chowania energii. Jeżeli w przypadku występowania sił tarcia czy lepkości przestaje obowią-
zywać zasada zachowania energii mechanicznej, zasada zachowania pędu pozostaje w mocy.
Istniejący pęd ciała czy układu nie może zniknąć, może być tylko przekazany innemu ciału.
4.
Na koniec podamy interesujący przykład: Mogłoby się wydawać, że przy spadku ciała z pew-
nej wysokości na Ziemię pęd uzyskany przez to ciało znika. Ale w przypadku tym układ, jaki
należy rozpatrywać, składa się z ciała i Ziemi. W chwili początkowej całkowity pęd tego
układu jest równy zeru - Ziemia i ciało są względem siebie w spoczynku. Gdy ciało spadające
skutkiem przyciągania ziemskiego uzyskuje pewien pęd, pamiętać należy, że - jak wynika z
III zasady dynamiki - Ziemia jest przyciągana przez nasze ciało z siłą równą ciężarowi ciała,
5
00506 Dynamika D
TEORIA
lecz skierowaną przeciwnie i uzyskuje wobec tego równy co do wartości, lecz przeciwnie
skierowany pęd. Suma pędów Ziemi i ciała pozostaje niezmieniona - równa zeru. Gdy ciało
spadnie na Ziemię, pęd ciała i Ziemi znikają równocześnie kompensując się wzajemnie - cał-
kowity zaś pęd układu pozostaje równy zeru. Inny przykład stanowi wahadło balistyczne -
przyrząd służący do pomiaru prędkości pocisków (będzie omówiony przy rozwiązywaniu za-
dań).
Temat: 27
Konsekwencje zasady zachowania pędu.
1.
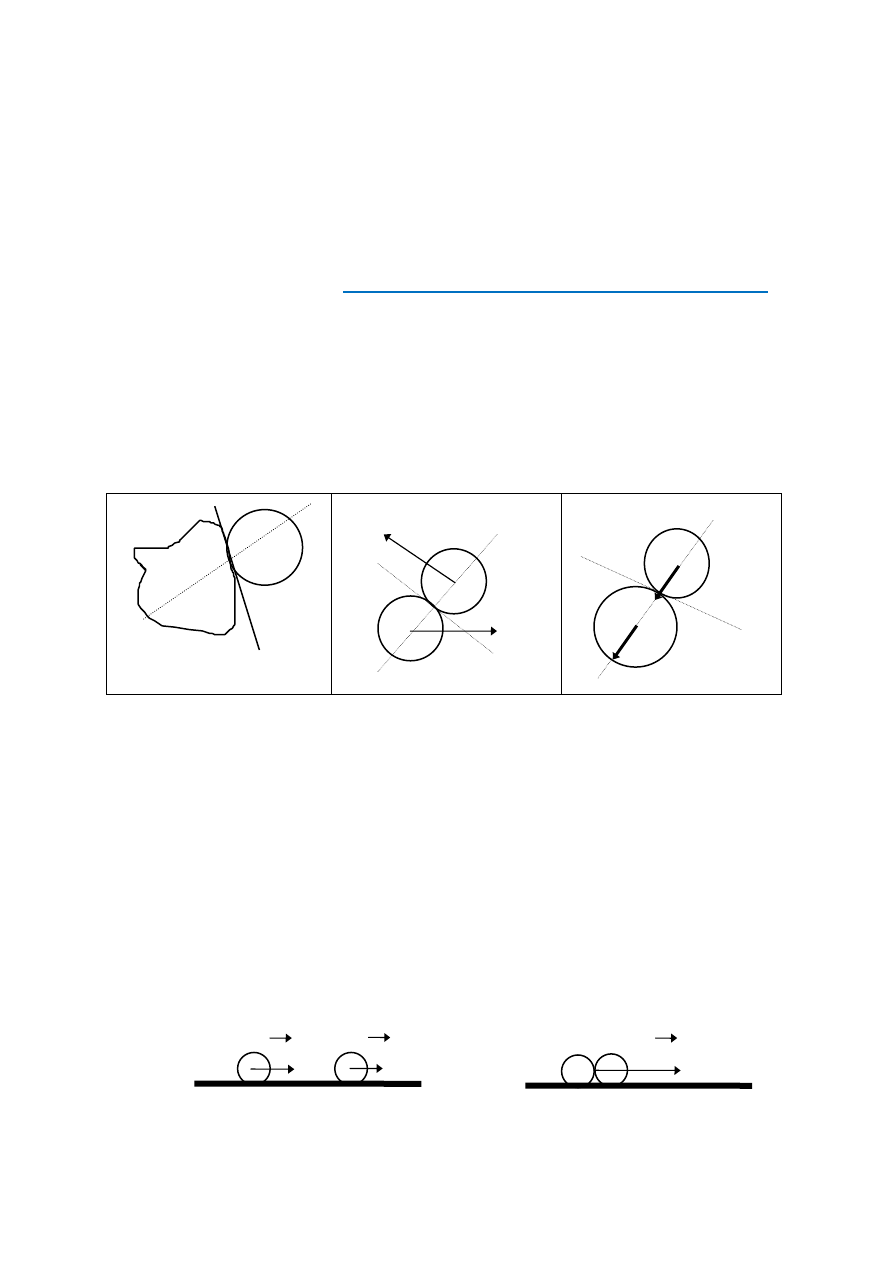
Przykładem zjawisk, których przebieg tłumaczymy zasadą zachowania pędu są zderzenia dosko-
nale niesprężyste. Zderzenia dzielimy na centralne i niecentralne. Zderzenie jest centralne, je-
ż
eli normalna do powierzchni, wystawiona w punkcie A zetknięcia się ciał zderzających przecho-
dzi przez środek masy ciała. Rysunek 1 przedstawia zderzenie centralne dla ciała I i jednocześnie
niecentralne dla ciała II. Punkty S
I
i S
II
oznaczają odpowiednio środki mas obu ciał. Zderzenia
kul jednorodnych są zawsze centralne.
••••
A S
I
••••
S
II
Rys. 1
Zderzenie skośne
r
v
II
A
r
v
I
Rys. 2
Zderzenia proste
A
r
v
II
r
v
I
Rys. 3
2.
*Inny podział zderzeń rozróżnia zderzenia skośne i proste. Zderzenie jest proste, jeżeli kierunki
normalnych wystawionych jak poprzednio w punkcie A zetknięcia się ciał pokrywają się z kierun-
kami prędkości. Rysunek 2 przedstawia zderzenie skośne dwóch kul. W przypadku kul zderzenia
są proste wtedy, gdy środki kul poruszają się po tej samej prostej, np. gdy jedna kula dogania dru-
gą lub obie przesuwają się wprost ku sobie.
3.
Biorąc pod uwagę charakter odkształceń zachodzących w ciałach podczas zderzeń podzielimy je
na sprężyste i niesprężyste. Mimo, że w przyrodzie nie występują ciała doskonale sprężyste ani
doskonale niesprężyste, wygodnie jest posługiwać się pojęciem zderzeń doskonale sprężystych i
doskonale niesprężystych. Jest to znowu idealizacja zjawisk upraszczająca rozważania matema-
tyczne. Zatem wyniki tu otrzymane są przybliżeniem rzeczywistych zjawisk w przyrodzie.
4.
Zderzenia doskonale sprężyste zostaną omówione przy zasadzie zachowania energii mechanicz-
nej. Teraz skupimy się na zderzeniach doskonale niesprężystych. W czasie tego zderzenia nie
działają w układzie odosobnionym siły zachowawcze, a zatem nie stosuje się zasada zachowania
energii mechanicznej; stosuje się natomiast zasada zachowania pędu.
v
1
v
2
(m
1
+ m
2
)
u
m
1
m
2
Rys. 4 Kule przed zderzeniem. Rys 5 Kule po zderzeniu niesprężystym.
6
00506 Dynamika D
TEORIA
Zgodnie z rysunkiem 4 mamy:
(1)
m v
m v
m
m
u
1
1
2
2
1
2
⋅ +
⋅ =
+
⋅
(
)
,
skąd prędkość wspólna po zderzeniu doskonale niesprężystym kul wynosi
(2)
u
m v
m v
m
m
=
⋅ +
⋅
+
1
1
2
2
1
2
.
Znając energię kinetyczną przed zderzeniem i energię kinetyczną bryły utworzonej w wyniku zderze-
nia, można obliczyć stratę energii kinetycznej przekształconą na inne rodzaje energii:
(3)
∆
E
m v
m v
m
m
u
k
=
⋅
+
⋅
−
+
⋅
1
1
2
2
2
2
1
2
2
2
2
2
(
)
.
Wstawiając do równania (2) równanie (3), otrzymujemy ostatecznie
(4)
∆
E
m m
m
m
v
v
k
= ⋅
⋅
+
−
1
2
1
2
1
2
1
2
2
(
)
.
Iloczyn obu zderzających się mas podzielony przez sumę tychże mas nazywamy masą zredukowaną
układu. Różnica prędkości v
1
- v
2
jest prędkością względną.
5.
Wnioskujemy ostatecznie, że ubytek energii kinetycznej przekształcony w czasie zderzenia do-
skonale niesprężystego na inne rodzaje energii jest proporcjonalny do masy zredukowanej układu
oraz kwadratu prędkości względnej.
6.
Zasada zachowania pędu tłumaczy również zjawisko odrzutu występujące przy wystrzale z broni
palnej i zasadę działania silników rakietowych. Analizę tych zjawisk przedstawiają zawarte w
kursie zadania.
7
00506 Dynamika D
TEORIA
Temat: 28
Ruch po równi pochyłej (bez tarcia).
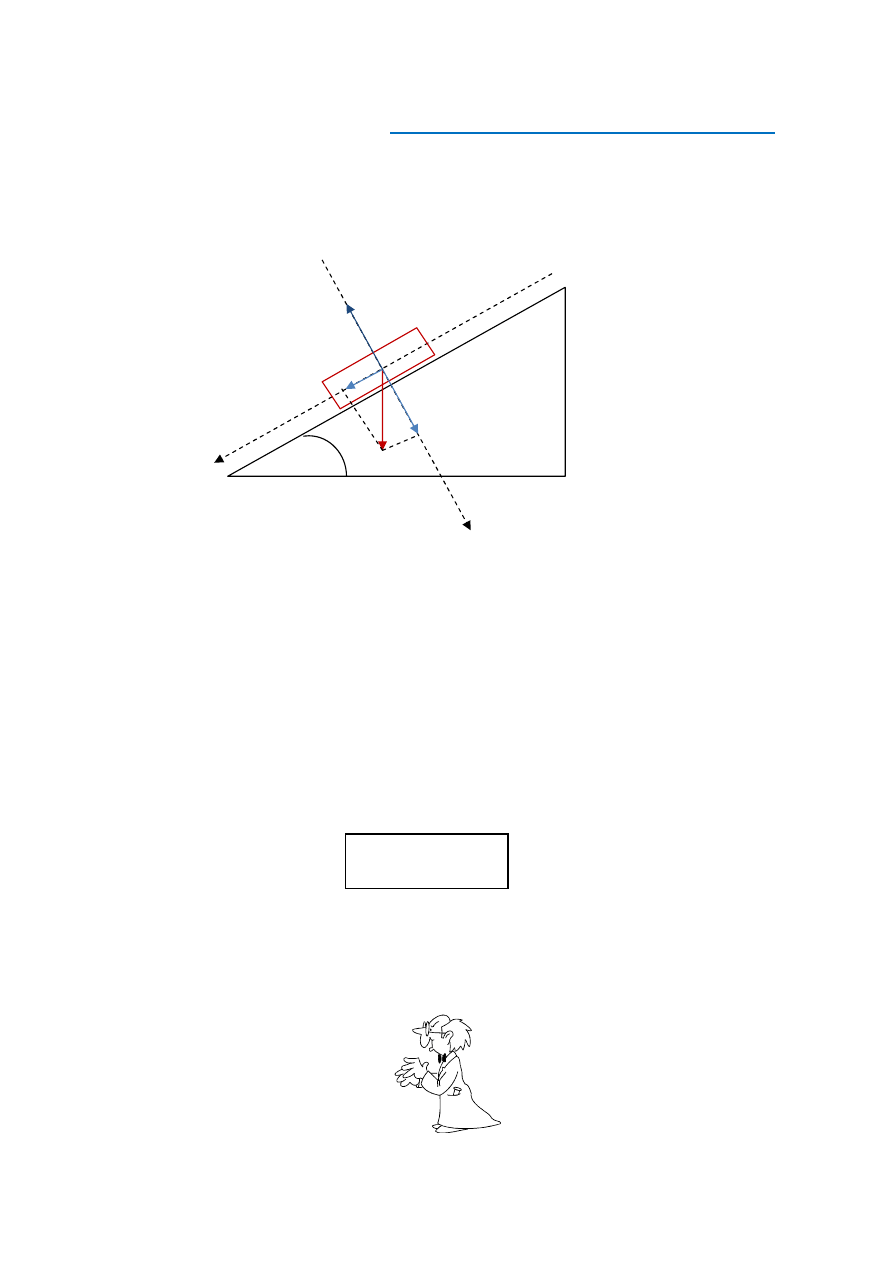
1.
Ciało znajdujące się na równi pochyłej nachylonej do poziomu pod kątem
α
(rys. 1) w jednorod-
nym polu grawitacyjnym o stałym natężeniu
r
ϕ
, nie może poruszać się w kierunku pionowym, w
którym działa przyspieszenie ziemskie
r
g
, a jedynie w kierunku równi (Pogrubione litery symboli-
zują wektory).
2.
Rozkładając wektor siły ciężkości
r
Q
= m·
r
g
na kierunek równoległy i prostopadły do równi,
otrzymujemy siłę
r
Q
x
= m·
r
a
powodującą zsuwanie się ciała po równi z przyspieszeniem
r
a
oraz
siłę normalną
r
Q
y
dociskającą ciało do równi.
3.
Ponieważ:
(1)
r
r
Q
Q
mg
x
=
=
sin
sin
α
α
i równocześnie z II zasady dynamiki:
(2)
r
Q
x
= m·
r
a
,
dlatego
(3) m·
r
a
=
mg
r
sin
α
.
Ostatecznie otrzymujemy:
(4)
r
r
a
g
=
sin
α
Wartość przyspieszenia
r
a
jest tym większa im większy jest kąt nachylenia równi do poziomu, przy
czym dla
α
= 90
0
otrzymujemy
r
a
=
r
g
, czyli spadek swobodny, zaś w przypadku
α
= 0
0
wartość
przyspieszenia
r
a
jest równa zeru.
αααα
x
y
R
Q
Q
x
Q
y
8
00506 Dynamika D
TEORIA
Temat: 29
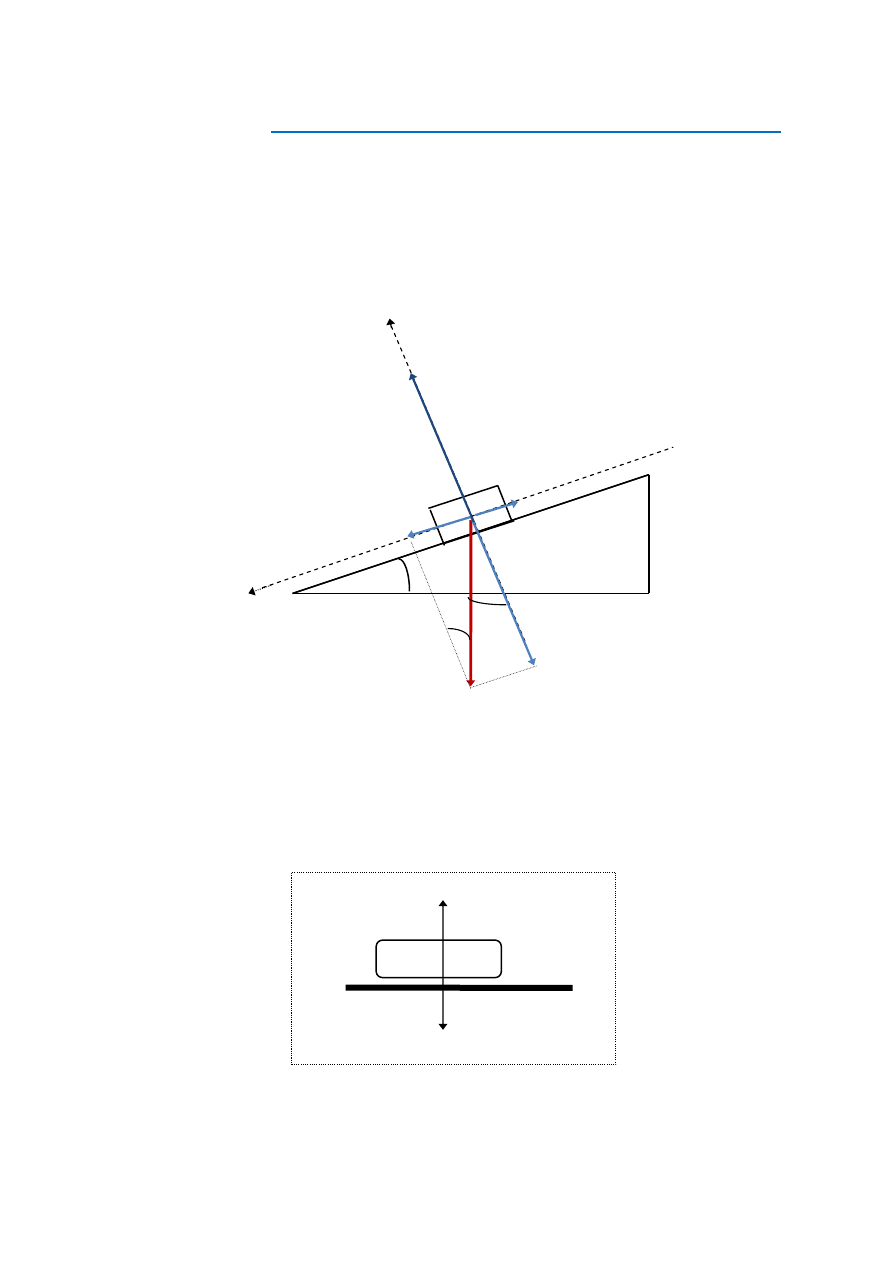
Ruch po równi pochyłej z uwzględnieniem tarcia.
1.
Siły tarcia, jak pamiętamy, to siły pojawiające się na styku powierzchni trących się ciał i
przeciwdziałające względnemu ruchowi tych ciał.
2.
Siła tarcia
r
T występująca przy poślizgu ciała stałego po ciele stałym jest, z nielicznymi
wyjątkami, proporcjonalna do siły przyciskającej ciało
r
Q
y
do podłoża (rys.1). Siłę
r
Q
y
nazywamy czasem naciskiem. Siłę tarcia określa wzór:
(1)
T
f Q
gdzie f
wspó czynnik tarcia
y
= ⋅
−
,
ł
.
y
r
R
r
T
r
Q
x
α
α
x
α
r
Q
y
Rys. 1
r
Q
3.
Ruch ciała po równi pochyłej z tarciem. Tym razem siłą
r
Q
y
przyciskającą ciało do
podstawy równi pochyłej nie jest całkowity ciężar
r
Q (tak jest przy ruchu poziomym -
rys. 2), lecz składowa ciężaru ciała prostopadła do powierzchni równi:
(2)
Q
Q
y
= ⋅
cos
α
r
R
•
r
Q
Rys. 2
Nacisk na poziomym podłożu
9
00506 Dynamika D
TEORIA
4.
W czasie zsuwania się po równi ciało o ciężarze Q = mg podlega działaniu dwóch sił: siły
zsuwającej Q
x
= Q sin
α
i hamującej siły tarcia T określonej wzorem (1). Siła wypadkowa
F powodująca ruch wynosi:
( )
( )
sin
( )
sin
cos
( )
sin
cos
( )
(sin
cos )
3
4
5
6
7
F
Q
T
F
Q
f Q
F
Q
f Q
F
mg
f mg
F
mg
f
x
y
=
−
=
− ⋅
=
− ⋅
=
− ⋅
=
− ⋅
α
α
α
α
α
α
α
Korzystamy teraz z II zasady dynamiki dającej F = ma
( )
(sin
cos )
( )
(sin
cos )
(
)
(sin
cos )
8
9
10
ma
mg
f
a
mg
f
m
a
g
f
=
− ⋅
=
− ⋅
=
− ⋅
α
α
α
α
α
α
5.
W czasie ruchu ciała po równi pochyłej do góry, zarówno siła
r
Q
x
jak i siła
r
T są przeciw-
nie skierowane do prędkości. A zatem siła wypadkowa, hamująca ruch, równa się w tym
wypadku:
( )
(sin
cos )
11
F
mg
f
=
+ ⋅
α
α
, czyli
(
)
(sin
cos )
12
a
g
f
=
+ ⋅
α
α
6.
Korzystamy teraz z I zasady dynamiki celem określenia zsuwania się ciała po równi po-
chyłej ruchem jednostajnym prostoliniowym:
(
)
(
)
sin
cos
(
)
sin
cos
(
)
13
14
15
16
0
0
0
Q
T
Q
f
Q
f
f
tg
x
=
= ⋅
=
=
α
α
α
α
α
przez f
0
oznaczony jest współczynnik tarcia statycznego.
Temat: 30
Dynamika ruchu jednostajnego po okręgu.
1.
Teraz zajmiemy się siłami występującymi podczas ruchu jednostajnego po okręgu. Rozważ-
my wspomniany ruch z punktu widzenia zasad dynamiki Newtona. Zgodnie z I zasadą dyna-
miki tylko ruch jednostajny prostoliniowy może odbywać się bez działania sił. Ruch jedno-
stajny po okręgu wymaga już istnienia siły.
2.
Według II zasady dynamiki wartość liczbowa tej siły wyraża się zależnością:
(1)
F
m a
= ⋅
Uwzględniając wzory wprowadzone przy kinematyce ruchu po okręgu ( a mianowicie:
a
v
r
oraz
a
r
=
=
2
2
ω
) otrzymujemy:
10
00506 Dynamika D
TEORIA
( )
( )
2
3
2
2
F
mv
r
oraz
F
m
r
=
=
ω
Kie-
runek tej siły jest zgodny z kierunkiem przyspieszenia, a więc wzdłuż promienia do środka koła.
Stąd pochodzi nazwa siła dośrodkowa.
Wstawiając zamiast
ω
wartość
2
π
T
otrzymujemy jeszcze inną postać zależności (3)
( )
lub
( )
4
4
5
4
2
2
2
2
F
mr
T
F
mf r
=
=
π
π
,
gdzie przez f oznaczono częstotliwość, czyli liczbę obrotów na sekundę.
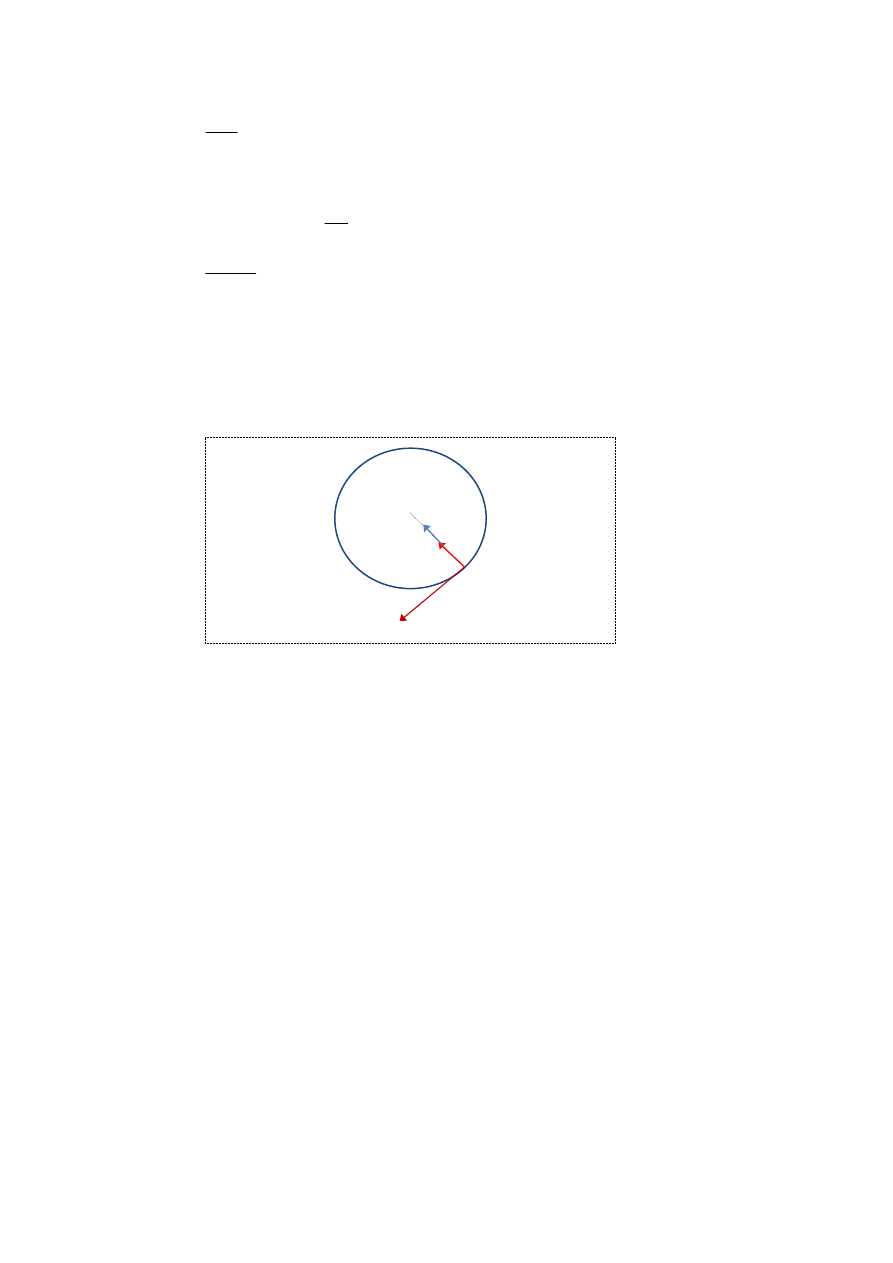
Rysunek 1 przypomina, że kierunek siły dośrodkowej jest prostopadły do kierunku prędkości. Jest
to uwaga bardzo istotna. Jeśli kiedykolwiek stwierdzimy przy badaniu ruchu ciała, że podlega
ono działaniu stałej co do wartości siły i skierowanej stale prostopadle do kierunku prędko-
ści ruchu, to będziemy mogli stwierdzić, że torem ruchu jest okrąg.
0
r
F
dośr
r
a
dośr
Rys. 1
r
v
2.
Można wymienić wiele przykładów siły dośrodkowej:
a)
gdy kamień przymocowany do sznurka wprawiamy w ruch po kole, to siłę dośrodkową wywiera nasza ręka za
pośrednictwem napiętego sznurka,
b)
gdy pociąg posuwa się po zakrzywionym torze, to sprężyste oddziaływanie zewnętrznej szyny stanowi siłę do-
ś
rodkową,
c)
jeżeli przyjmiemy, że Księżyc krąży dokoła Ziemi po torze kołowym, to siłę dośrodkową stanowi przyciąganie
grawitacyjne Ziemi,
d)
podczas krążenia elektronu po orbicie kołowej dokoła jądra atomu (w klasycznym modelu budowy atomu zapro-
ponowanego w 1911 roku przez Rutherforda), siłę dośrodkową stanowi elektryczne przyciąganie ujemnie nałado-
wanego elektronu przez dodatnio naładowane jądro atomowe,
e)
jeśli samochód zakręca wykonując łuk będący częścią okręgu, to siłę dośrodkową stanowi siła tarcia między jezd-
nią i oponami pojazdu.
3.
Załóżmy, że w pewnej chwili przestaje działać na ciało siła dośrodkowa, np. przerywa się sznurek, do którego przymo-
cowany był poruszający się kamień. Zgodnie z zasadą bezwładności ruch ciała nie ustaje, lecz trwa dalej jako ruch jed-
nostajny wzdłuż stycznej do toru kołowego. Oczywiście sprawa komplikuje się, jeżeli prócz siły dośrodkowej działają
na ciało jeszcze inne siły. Grudki błota odlatują od koła rowerowego po torze krzywoliniowym, gdyż do ruchu po stycz-
nej dodaje się ruch wywołany działaniem siły ciężkości. Podobnie przedstawia się ruch odlatujących od tarczy szlifierki
opiłków szlifowanych na niej przedmiotów.
4.
Zgodnie z III zasadą dynamiki działaniu siły dośrodkowej na ciało krążące po okręgu musi towarzyszyć działanie siły
odśrodkowej na tzw. „więzy”. Przez więzy rozumiemy te ciała, które wymuszają ruch po kole. W naszych przykładach
takimi więzami będą: ręka, szyna kolejowa, Ziemia, jądro atomowe, jezdnia. Siła dośrodkowa
r
F
dośr
jest równa co do
wartości sile odśrodkowej
r
F
odśr
, lecz ma przeciwny zwrot:
( )
6
r
r
F
F
dośr
odśr
=
Siła dośrodkowa nie równoważy się z siłą odśrodkową, gdyż obie siły działają na różne
ciała.
Uwaga: Nie należy mylić siły odśrodkowej działającej na więzy ruchu z tzw. siłą odśrodkową bezwładności działającą w
układzie nieinercjalnym na ciało w ruchu po okręgu. To dwa różne pojęcia !
Koniec
Wyszukiwarka
Podobne podstrony:
00505 dynamika D part 1 2008 teoria zasady dynamiki(1)
00509 Bryła sztywna D part 2 2008 teoria dynamika bryły(1)
00503 Kinematyka D part 3 2008 teoria ruch jednosstajnie zmienny(1)
00502 Kinematyka D part 2 2008 teoria opis ruchu, prędkość w ruchu prostoliniowym(1)
00504 Kinematyka D part 4 2008 teoria ruch w polu Ziemi i po okręgu(1)
00501 Kinematyka D part 1 2008 teoria wektory, układ SI(1)
00508 Bryła sztywna D part 1 2008 teoria kinematyka bryły(1)
Z Ćwiczenia 20.04.2008, Zajęcia, II semestr 2008, Teoria informacji i kodowania
Analiza dynamiki zjawisk M Miszczyński Teoria i zadania
zadania z analizy dynamiki zjawisk 2008-09, Ekonomia, HZ, Stata, zadania
Teoria zmiany społecznej(9) 09.01.2008, Teoria zmiany społecznej (9)
Z Wykład 24.02.2008, Zajęcia, II semestr 2008, Teoria informacji i kodowania
AB Śląska DYNAMIKA K Kulturowy 2008
Z Wykład 30.03.2008, Zajęcia, II semestr 2008, Teoria informacji i kodowania
9 - Dynamika Punktu Materialnego - Teoria, XI
więcej podobnych podstron