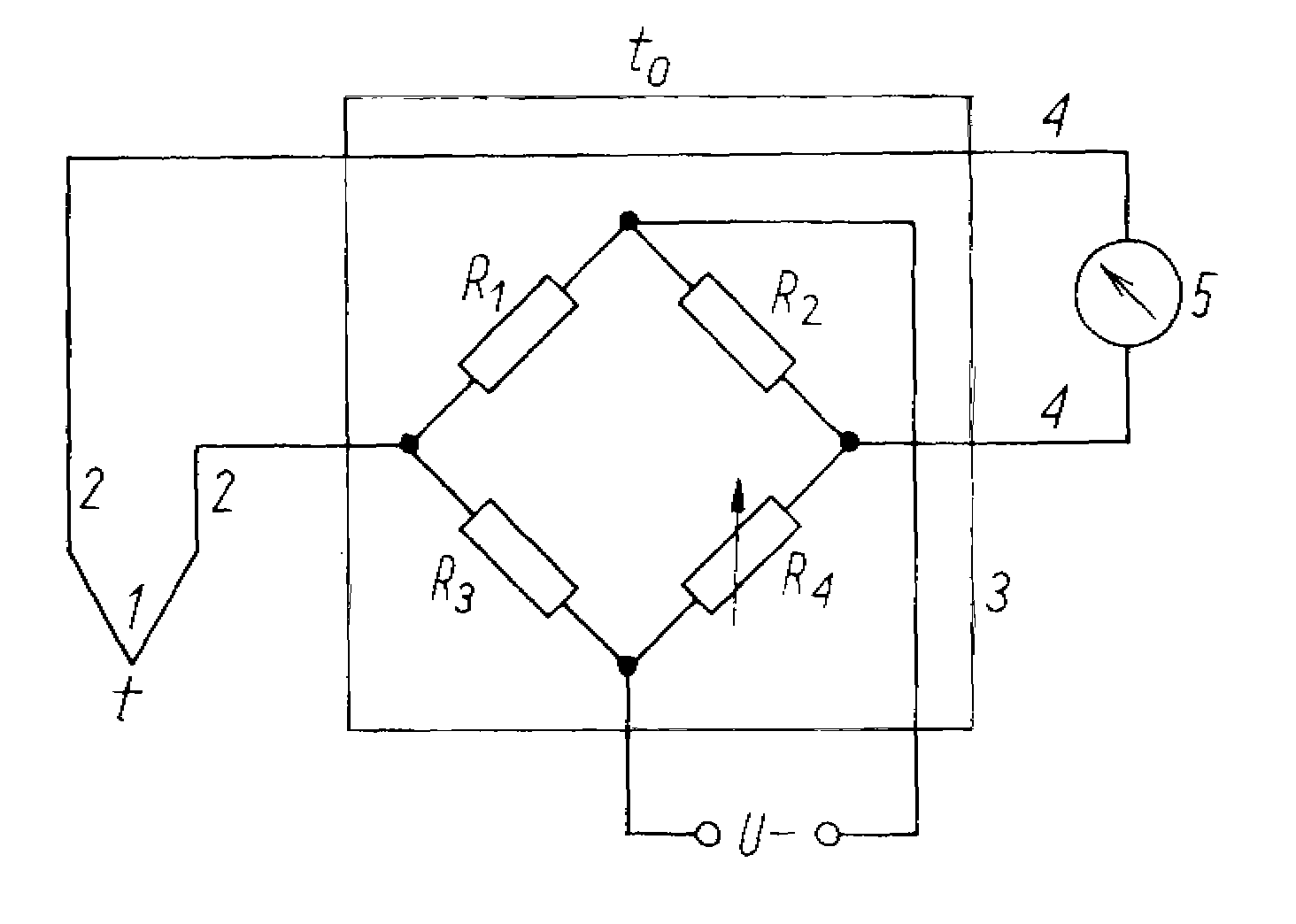
Rys. Układ do korekcji temperatury odniesienia; R1, R2, R3-rezystory manganinowe, R4-rezystor z miedzi lub niklu, 1-termoelement, 2-przewody kompensacyjne, 3-mostek korekcyjny, 4-przewody łączeniowe, 5-miernik.
Zmiana temperatury otoczenia przystawki korekcyjnej powoduje zmianę nierównowagi mostka, w wyniku której zmiana napięcia od spoiny pomiarowej jest kompensowana zmianą niezrównoważenia motka.
Metody pomiaru i przyrządy do pomiaru siły termoelektrycznej
Zależnie od wymaganej dokładności pomiaru stosuje się różne metody określania wartości siły termoelektrycznej. Metody te opierają się na dwóch podstawowych zasadach pomiaru napięcia. Pierwsza z nich to metoda bezpośrednia wychyleniowa, stosowana powszechnie w pomiarach technicznych i przemysłowych, druga pośrednia, zwana metoda kompensacyjną, stosowana przy dokładnych pomiarach laboratoryjnych.
Metoda wychyleniowa.
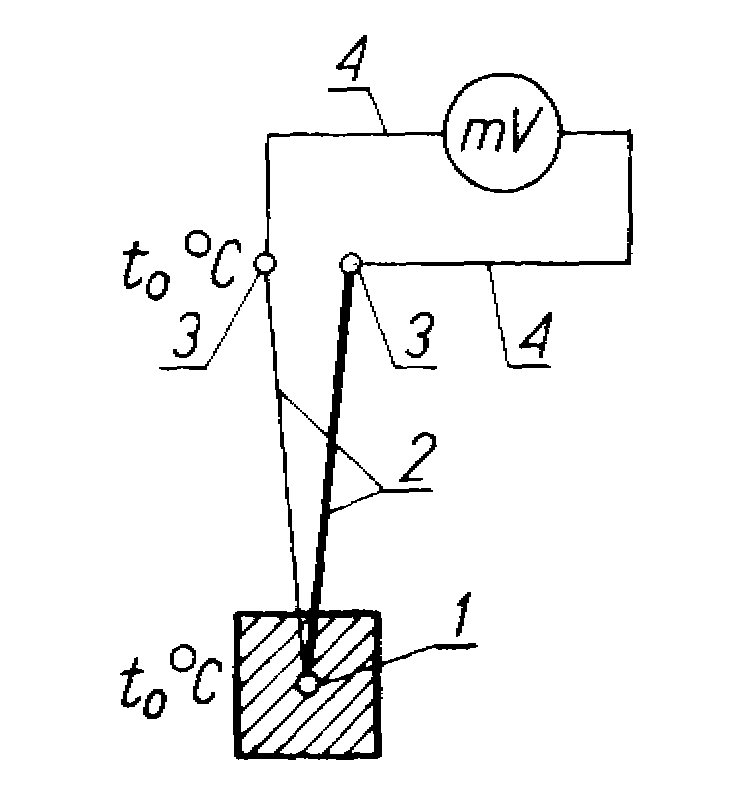
Układ pomiarowy składa się z termoelementu, przewodów kompensacyjnych i miliwoltomierza. stanowiącego przyrząd pomiarowy, połączonych w obwód zamknięty.
Rys. Układ połączeń do pomiaru temperatury termoelementem metodą wychyleniową; 1-spoina pomiarowa, 2-termoelement, 3-spoina odniesienia, 4-przewody łączeniowe.
Powstała w tym obwodzie siła termoelektryczna, będąca wynikiem różnicy temperatury spoiny pomiarowej i odniesienia, powoduje przepływ prądu w zamkniętym obwodzie. Miliwoltomierz wskazuje spadek napięcia na swojej rezystancji będący wynikiem przepływu przez niego prądu.
Metoda kompensacyjną zerowa. Polega ona na porównywaniu napięć z termoelementu i z wewnętrznego źródła kompensatora. Równość napięć wskazuje stan zerowy galwanometru włączonego szeregowo w obwód obu źródeł i jest podstawą określenia napięcia kompensującego. Stan zerowy świadczy o braku przepływu prądu w obwodzie termoelement - kompensator i pozwala na prowadzenie pomiarów w stanie bezprądowym w termoelemencie; spadek napięcia na rezystancji termoelementu jest równy zeru. Metoda kompensacyjna jest więc metodą porównawczą. Rezystancja termoelementu, nie ma wpływu na wynik pomiaru.
Termometr (pirometr) optyczny całkowitego promieniowania
Zasada działania pirometrów całkowitego promieniowania, zwanych radiacyjnymi, opiera się na pomiarze natężenia promieniowania całkowitego zgodnie z prawem Stefana-Boltzmanna. Ilość energii wymienianej przez promieniowanie między dwoma doskonale czarnymi ciałami zależy jedynie od temperatury powierzchni tych ciał.
Jeżeli przyjąć do rozważań dwa ciała doskonałe czarne o temperaturze odpowiednio T1 (ciała badanego) i T2 (ciała stanowiącego absorber pirometru), to można stwierdzić, że temperatura T2 osiągnie wartość zależną od temperatury T1 i od warunków wymiany ciepła z powierzchni absorbera do otoczenia. Dla określonego pirometru istnieje zatem zależność funkcyjna T1 = f(T2), pozwalająca przyporządkować odpowiednim wartościom temperatury T2 absorbera odpowiednie wartości T1. Aby funkcja ta była jednoznaczna, ciało badane powinno być możliwie zbliżone do ciała doskonale czarnego, gdyż w odniesieniu do takiego ciała są wzorcowane pirometry.
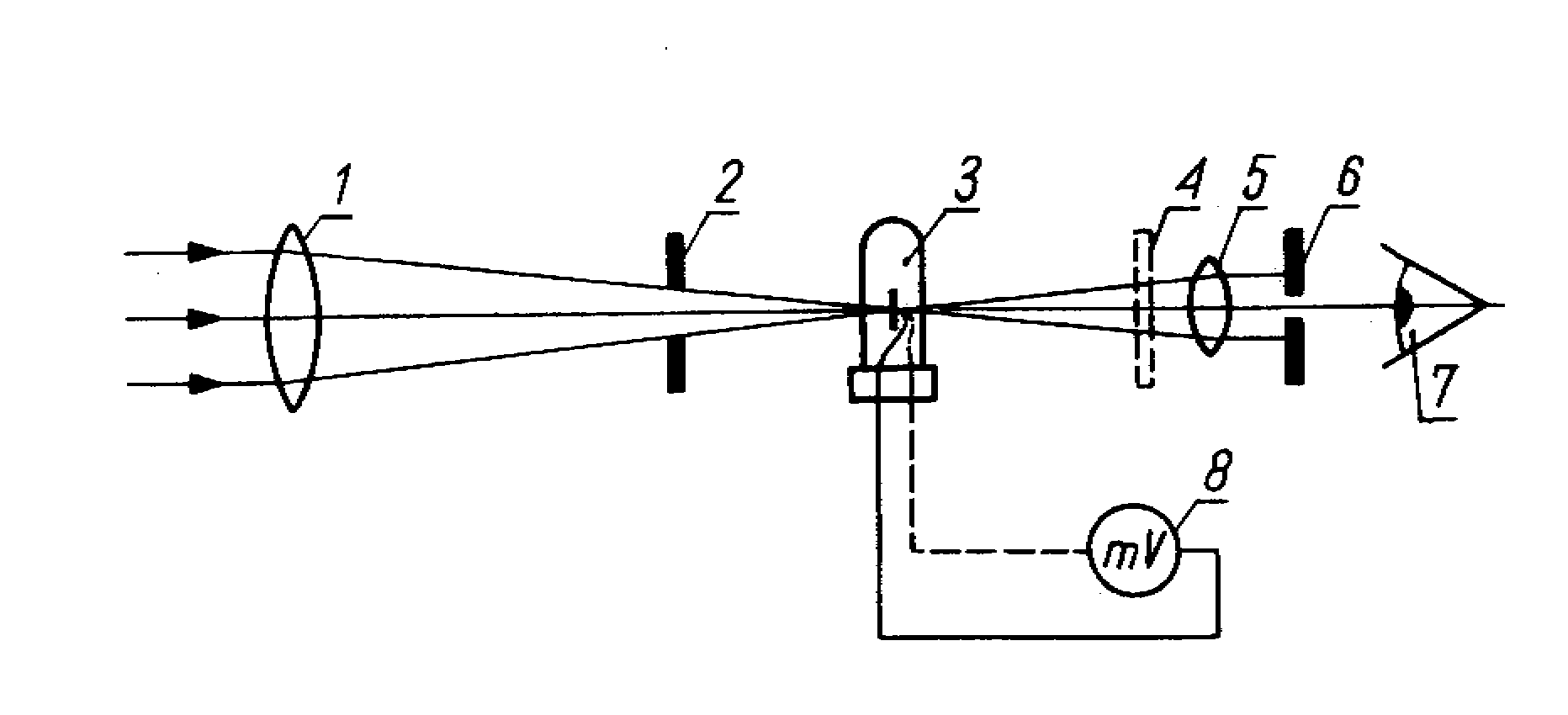
Na rysunku przedstawiono schemat pirometru optycznego całkowitego promieniowania.
Rys. schemat ideowy pirometru optycznego całkowitego promieniowania; 1-obiektyw, 2-przesłona, 3-spoina pomiarowa termoelementu, 4-szkło przydymione, 5-okular, 6-przesłona, 7-obserwator, 8-miliwoltomierz.
Promieniowanie cieplne wysyłane przez ciało, którego temperaturę chce się określić jest skupione za pomocą soczewki, zwierciadła lub światłowodu na detektorze promieniowania. Jest nim najczęściej płytka platynowa o średnicy ok. 3 mm wyposażona w termoelement lub kilka termoelementów połączonych szeregowo. Czasami stosuje się detektor wyposażony w rezystory termometryczne, termistory lub elementy bimetalowe.
W celu poprawienia zdolności absorpcji i powierzchnia detektora (czujnika - absorbera) jest czerniona. Absorber jest umieszczony w szczelnej obudowie szklanej wypełnionej argonem w celu zapewnienia jednoznacznej i określonej wartości współczynnika przejmowania ciepła.
Pomiar sprowadza się, ogólnie biorąc, do pomiaru różnicy temperatury absorbera i otoczenia. Zależność między wskazaniami przyrządów pomiarowych a temperaturą mierzoną wyznacza się przez wzorcowanie, tzn. przez pomiar temperatury ciała doskonale czarnego o ściśle określonej i ustalonej w czasie temperaturze i przypisanie jej odpowiedniego wskazania przyrządów pomiarowych pirometru.
Dla ciał szarych pirometr całkowitego promieniowania będzie wskazywał temperaturę mniejszą od rzeczywistej . Stosowanie poprawki korekcyjnej jest niemożliwe, ponieważ emisyjność ciała szarego ε jest jego indywidualną cechą.
Termometr (pirometr) fotoelektryczny
Zasada działania pirometrów fotoelektrycznych polega na pomiarze sygnału elektrycznego wytwarzanego w fotoelementach, na których jest skupiane promieniowanie cieplne wysyłane przez ciało badane. Zakres długości fal promieniowania wykorzystywanych w danym pirometrze fotoelektrycznym zależy od czułości widmowej zastosowanego fotoelementu, przepuszczalności widmowej soczewki lub filtru. Pirometry o bardzo wąskim paśmie wykorzystywanego promieniowania można zaliczyć do pirometrów monochromatycznych, pozostałe zaś nazywa się pirometrami pasmowymi .
Jako detektory promieniowania stosuje się fotoelementy przewodzące takie, jak np. fotorezystory, fotodiody, fotoelementy emisyjne oraz fotoogniwa.
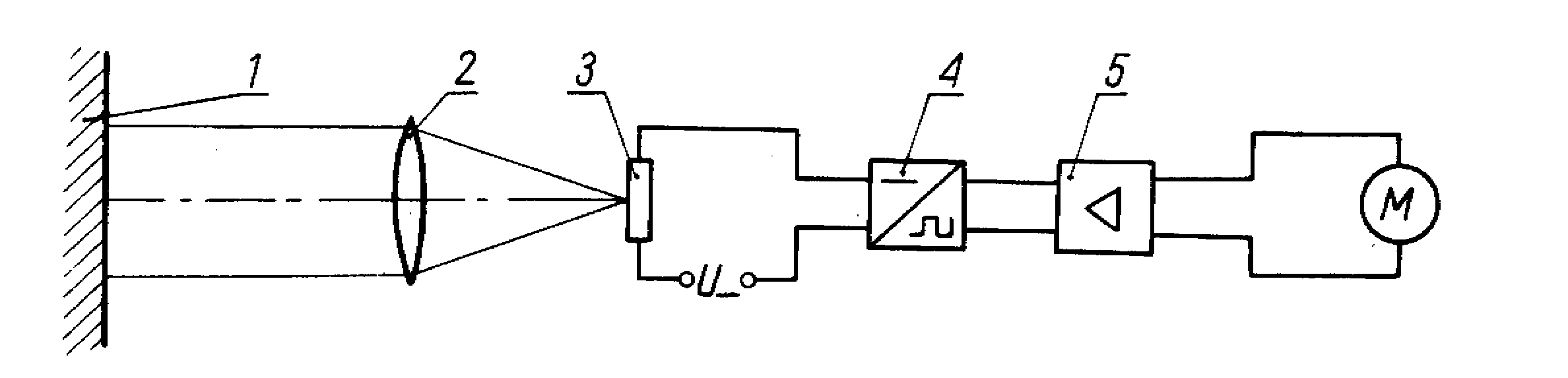
Na rysunku przedstawiono schemat ideowy pirometru fotoelektrycznego.
Rys. Schemat ideowy pirometru fotoelektrycznego; 1 - ciało badane, 2 - soczewka skupiająca, 3 - detektor fotoprzewodzący, 4- przetwornik, 5-wzmacniacz, M - miernik wyskalowany w skali temperatury
Promieniowanie cieplne ciała 1, którego określa się temperaturę, jest skupione soczewką 2 na detektorze fotoprzewodzącym 3 zasilanym stabilizowanym napięciem stałym. Zmiana prądu w obwodzie jest wywołana zmianą rezystancji fotorezystora, spowodowaną działaniem promieniowania cieplnego ciała badanego. Sygnał ten, po przetworzeniu w przetworniku 4 na sygnał prądu przemiennego, jest wzmacniany we wzmacniaczu S i podawany na miernik M wycechowany w skali temperatury źródła promieniowania. Zastosowanie jako miernika przyrządu rejestrującego pozwala na rejestrację w czasie temperatury ciała badanego. Jednocześnie sygnał wyjściowy ze wzmacniacza może służyć do realizacji układu automatycznej regulacji temperatury.
Poprawność wskazań pirometru zależy od stabilności w czasie fotodetektora i powinna być okresowo sprawdzana.
2. Narysować schemat blokowy i opisać działanie układu stabilizacji prędkości obrotowej silnika głównego. Omówić charakter zakłóceń oddziałujących na ten układ.
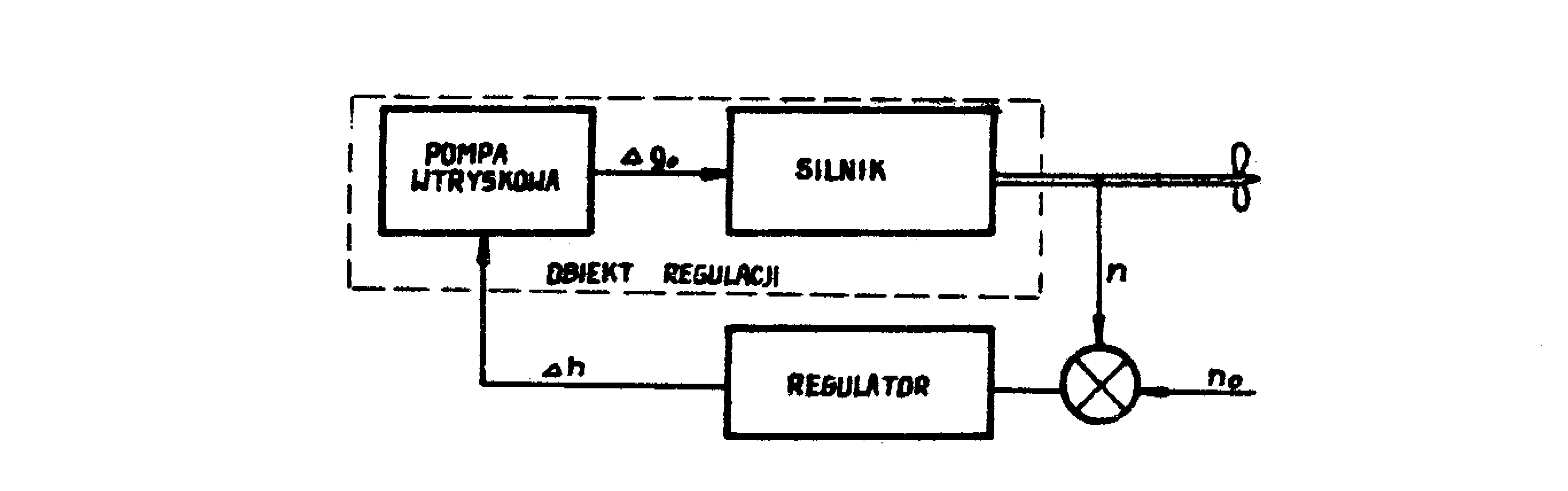
Silnik spalinowy, wraz z jednozakresowym regulatorem prędkości obrotowej, tworzy układ wykazujący wszystkie charakterystyczne cechy układu automatycznej regulacji . Wszystkie elementy składowe tego układu, nazywane najczęściej członami, tworzą jedną funkcjonalną całość, niezależnie od ich konstrukcji.
Rys. Schemat blokowy układu regulacji prędkości obrotowej silnika spalinowego.
Z praktycznych względu dzieli się jednak cały układ na urządzenia podlegające regulacji, czyli obiekt regulacji (w rozważanym wypadku silnik spalinowy wraz z pompą wtryskową) oraz na urządzenie regulujące czyli regulator. Podział taki ma duże znaczenie praktyczne, bowiem zarówno obiekt regulacji, jak i regulator mogą się składać z kilku oddzielnych członów. Prędkość obrotowa silnika, jako wielkość poddawana regulacji, w rozważaniach ogólnych nosi nazwę wielkości regulowanej. Ustalana przez użytkownika wartość, jaką powinna mieć prędkość obrotowa nazywana jest wartością zadaną wielkości regulowanej (n0) lub prościej: wartością zadaną. W jednozakresowym regulatorze obrotów ustala się ją przez odpowiednie napięcie sprężyny w zespole sterującym tego regulatora. W zespole tym następuje również porównywanie wartości zadanej n0 z bieżącymi wartościami, wielkości regulowanej n. Praktycznie polega to na porównywaniu siły napięcia sprężyny z wypadkową, sił bezwładności, działających na bezwładniki regulatora w ich ruchu wirowym. Jeżeli wartość wielkości regulowanej różni się od wartości, regulator zmienia wielkość nastawienia Δh, wprowadzaną do obiektu regulacji. Wielkość, o której mowa powinna zostać wybrana w taki sposób, aby jej zmiany wywoływały w ostatecznej konsekwencji zmiany wielkości regulowanej. W razie regulacji prędkości obrotowej silnika spalinowego, wielkością nastawianą jest nastawa paliwa. Przebiegająca przez układ regulacji wielkość przekazywana jest od jednego do drugiego członu wyłącznie w jednym kierunku. Wielkość ta nazywana jest sygnałem. Każdy człon układu posiada więc określony sygnał wejściowy i sygnał wyjściowy. Warto również zwrócić uwagę na to, że , w układzie regulacji nie ma znaczenia to, że przenoszony sygnał zmienia swoją postać fizyczną. Tak np. zmiana prędkości obrotowej silnika wywołuje zmianę sił bezwładności w zespole sterującym regulatora, w wyniku czego następuje przesunięcie Δh elementu nastawy paliwa. Powoduje to zmiany mocy użytecznej silnika, co ostatecznie prowadzi do zmniejszenia lub zwiększenia jego prędkości obrotowej.
Do największych zakłóceń oddziaływujących na ten układ należą zmiany obciążenia związane z falowaniem. Współpraca silnika spalinowego ze śrubą okrętową, w warunkach zmiennego obciążenia zewnętrznego wywołanego falowaniem morza (rysunek poniżej) nie odbywa się więc według charakterystyki regulatorowej Nr. W zależności od tego czy charakterystyka śruby zmienia się na charakterystykę lekką (NSL) czy na charakterystykę ciężką zmiany prędkości obrotowej układu napędowego następują wzdłuż punktów leżących na liniach stanowiących ograniczenie strefy nieczułości regulatora obrotów.
W statycznych warunkach równowagi zespołu sterującego regulatora zakłada się, że ruch jego regulatorów odpowiada zmianom jego prędkości kątowej i ustaje w chwili, w której prędkość obrotowa silnika stabilizuje się nowych, ustalonych warunkach pracy. W rzeczywistości. każdemu przesunięciu elementów regulatora towarzyszy powstawiane sił bezwładności, w wyniku przyspieszenia jakiemu poddawane są masy tych elementów. Siły te wywołują dodatkowe ruchy elementów regulatora, niezależnie od zmian jego prędkości obrotowej, z których najbardziej
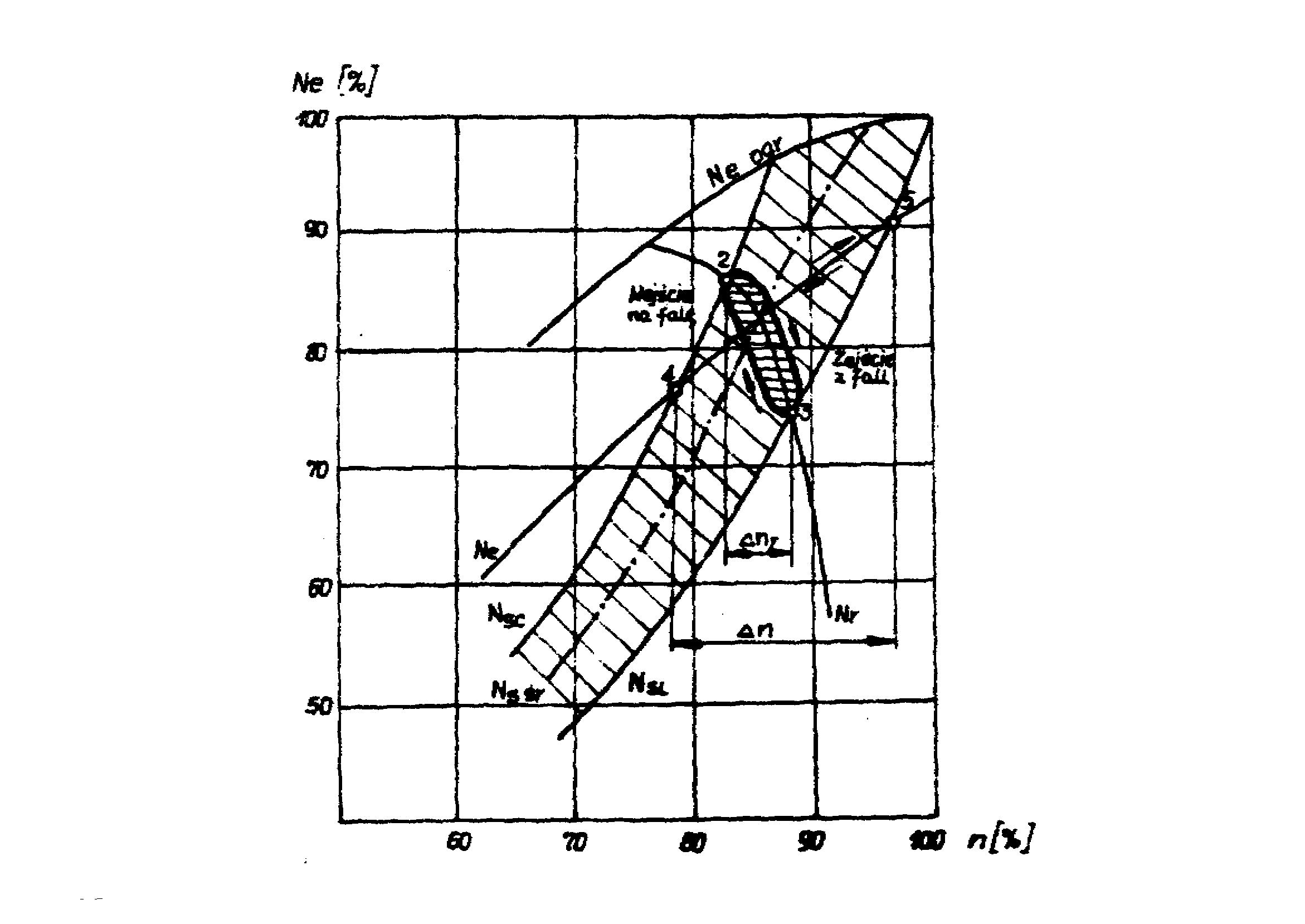
Rys. Współpraca silnika ze śrubą okrętową w zmiennych warunkach obciążenia zewnętrznego, z uwzględnieniem strefy nieczułości regulatora
obrotów
niepożądane są ruchy oscylacyjne elementu zmieniającego nastawę paliwa silnika. Zmieniający się w takiej sytuacji pomp wtryskowych powoduje zmiany prędkości obrotowej silnika, co z kolei prowadzi do zmian prędkości kątowej regulatora i wyzwolenia w jego strukturze następnych sił bezwładności. w krańcowym przypadku wywołane tym oscylacje prędkości obrotowej silnika mogą mieć charakter niegasnący przez długie okresy, a nawet mogą wzrastać, co w konsekwencji grozi niestabilnością pracy układu napędowego i koniecznością, jego zatrzymania.
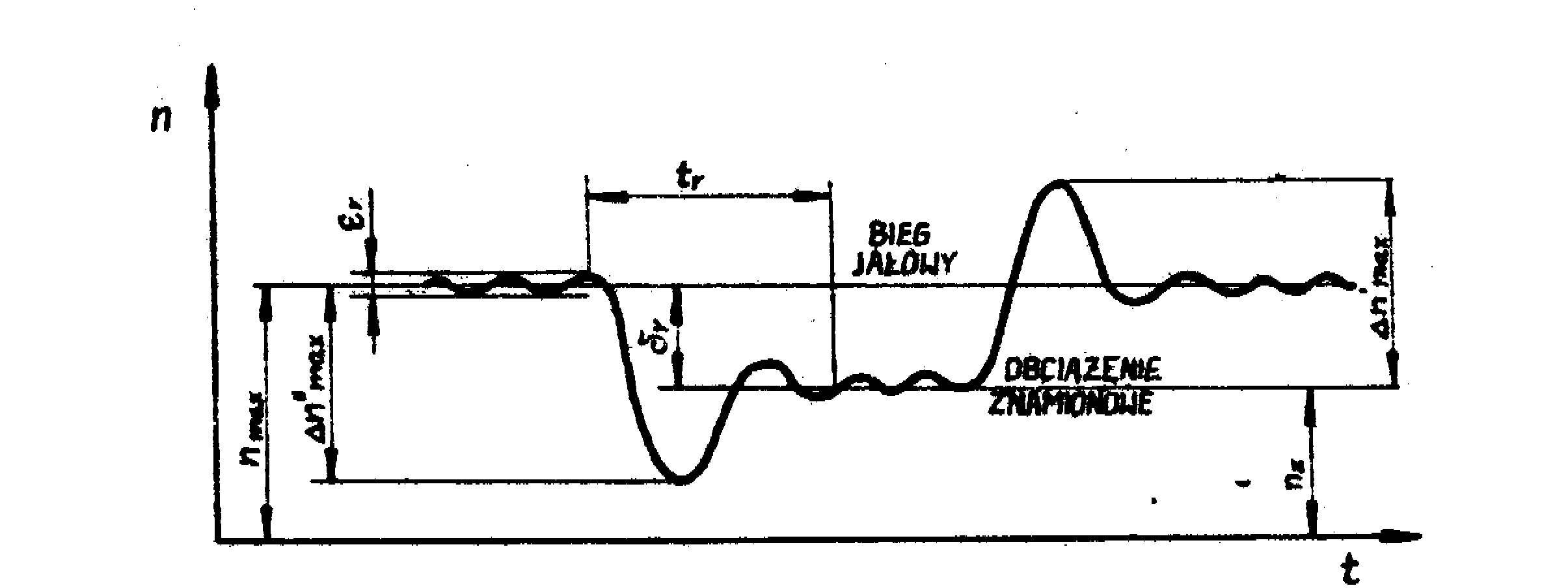
Rys. Zmiana prędkości obrotowej silnika w stanach nieustalonych.
Zmiany prędkości obrotowej silnika pracującego w warunkach ustalonych rysunek powyżej, np. na biegu jałowym, są stosunkowo, niewielkie i nie przekraczają strefy nieczułości regulatora εr. Jżeli w takiej sytuacji. silnik zostanie obciążony do wartości znamionowej, jego prędkość obrotowa początkowo zacznie się zmniejszać, a następnie wzrastała w wyniku działania regulatora i po pewnej liczbie oscylacji osiągnie nowy stan ustalony. Różnica prędkości obrotowej silnika przed i po obciążeniu odpowiada stopniowi niejednostajności regulacji δr. Z uwagi na ewentualne przeciążenie mechaniczne, istotna jest w tym wypadku wartość dynamicznego odchylenia regulacji prędkości obrotowej:
Δd=Δ̉n΄max/nz
charakteryzująca największe chwilowe odchylenie liczby obrotów silnika po nagłym zdjęciu obciążenia w stosunku do obrotów znamionowych nz. Ze względów użytkowych interesujący jest również czas ustalania się prędkości obrotowej tr, który upływa od chwili zmiany obciążenia silnika do osiągnięcia przez niego ustalonych warunków pracy. Do celów porównawczych czas tr określa się zazwyczaj po zdjęciu obciążenia znamionowego, do chwili osiągnięcia przez silnik ustalonych warunków pracy na biegu luzem.
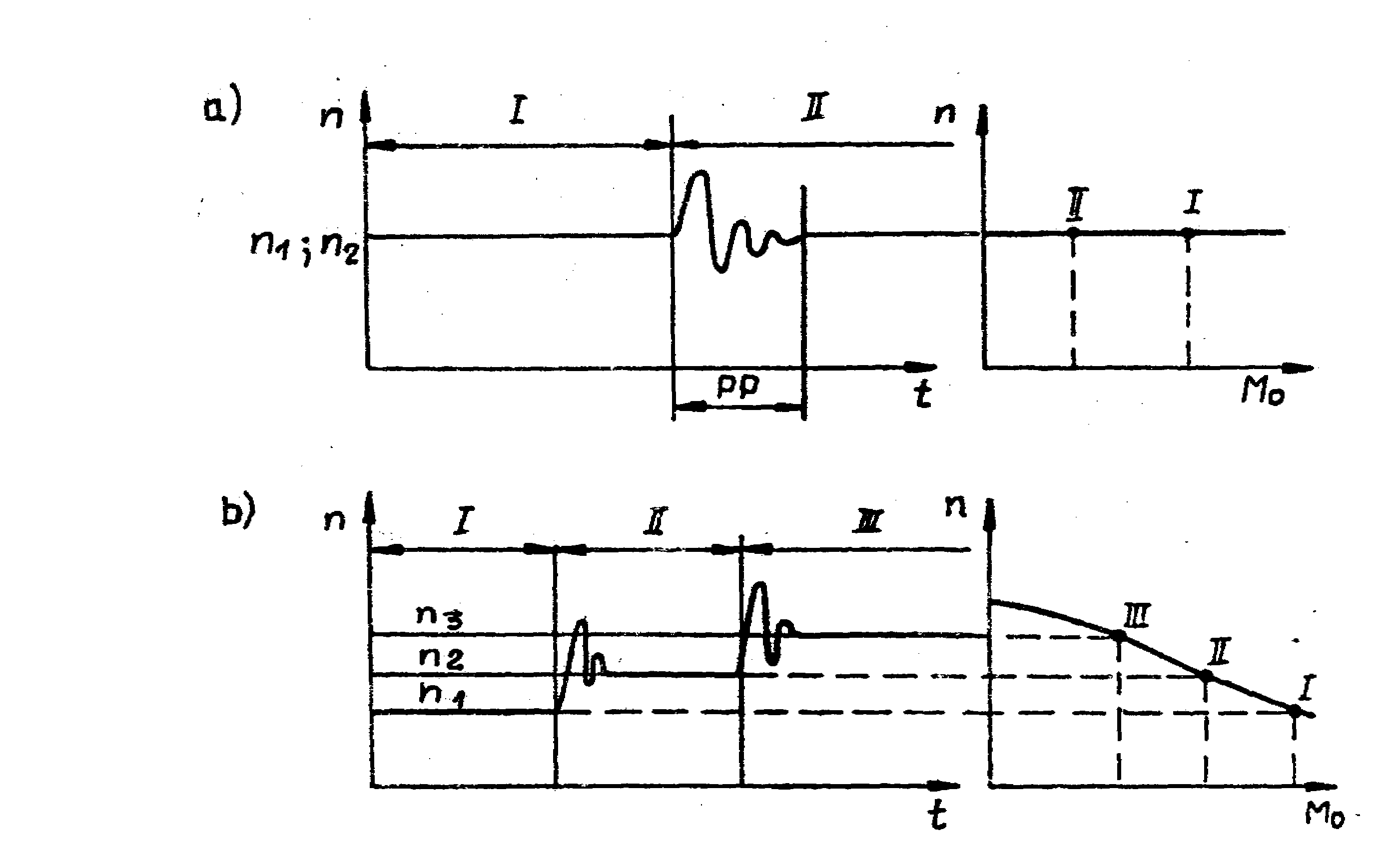
Oscylacyjny charakter zmian prędkości obrotowej silnika w okresie przejściowym PP (rysunek poniżej) między jednym stanem ustalonym np.I a innym stanem ustalonym np.II występuje zawsze po zmianie obciążenia zewnętrznego Mo, niezależnie od tego,
Rys. Zmiany prędkości obrotowej silnika przy regulacji: a) astatycznej; b) z określonym stopniem niejednostajności.
czy proces regulacji odbywa się według astatycznej charakterystyki regulatorowej (a) czy też charakterystyki z określonym stopniem niejednostajności (b). W wyniku złożonej analizy dynamicznej można jednak wybrać układ regulacji w taki sposób, aby w procesie przejściowym nie występowały w ogóle oscylacje
regulowanej prędkości obrotowej (rysunek poniżej)
doprowadzić do periodyczności procesu przywracania równowagi w
układzie lub aby oscylacje te były szybko gasnące i miały niewielką amplitudę początkową.
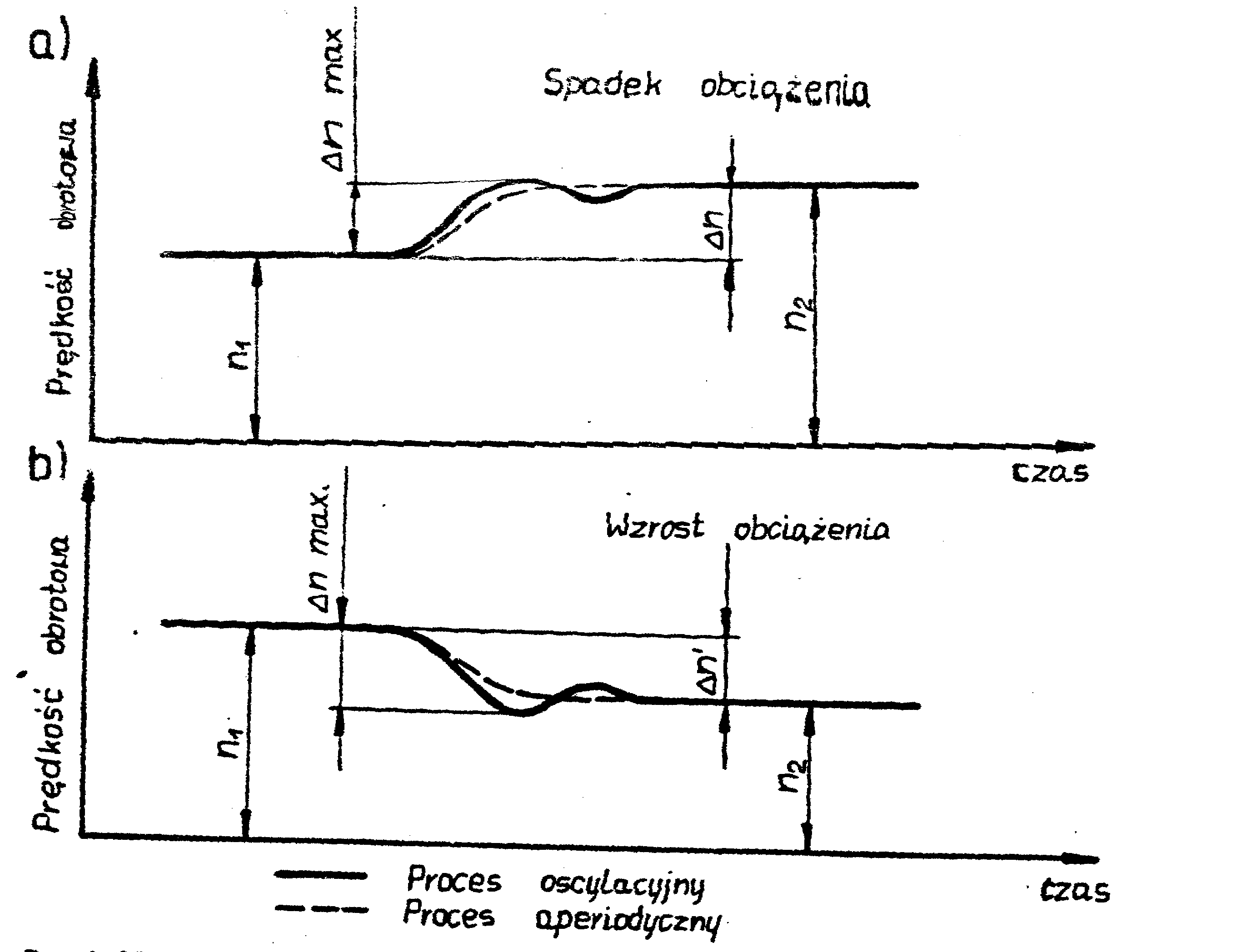
Rys. Oscylacyjny i aperiodyczny charakter zmian prędkości obrotowej silnika: a) po zdjęciu obciążenia; b) po obciążeniu.
Z tego względu układy automatycznej regulacji
wymagają podczas projektowania szczegółowej analizy matematycznej, na której podstawie określa się równania ruchu poszczególnych członów. Rozwiązania tych równań, w formie zależności wielkości regulowanej od czasu, umożliwiają matematyczne odwzorowanie procesów przejściowych występujących w każdej fazie procesu regulacji.
9
Wyszukiwarka
Podobne podstrony:
88 Nw 02 Przystawka do pomiaru temperatury
Podstawowe informacje o zmianach w systemie VAT po przystąpieniu Polski do Unii Europejskiej
abstrakt temat 11, Zmiana organizacyjna - jest to każda istotna zmiana dokonywana w jakieś organizac
88 Nw 02 Przystawka do pomiaru temperatury
Przedmiot PRI i jego diagnoza przegląd koncepcji temperamentu
STRELAU KWESTIONARIUSZ TEMPERAMENTU(1)
Zarzadzanie zmianami GR3
W5 Temperatura powietrza WWSTiZ
Otoczenie organizacji
Zmiana spoleczna i jej przyczyna
Otoczenie organizacji
temperament
Metody analizy otoczenia
otoczenie organizacji2
Model turbulecji otoczenia
Postawy i ich zmiana
Otoczenie Przedsiębiorstwa Hotelarskiego
więcej podobnych podstron