„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Urszula Ran
Analizowanie układów elektrycznych i automatyki
przemysłowej 711[02].Z2.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Janina Świątek
mgr inż. Aleksander Wrana
Opracowanie redakcyjne:
mgr inż. Urszula Ran
Konsultacja:
mgr inż. Gabriela Poloczek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 711[02].Z2.01
„Analizowanie
układów
elektrycznych
i
automatyki
przemysłowej”,
zawartego
w modułowym programie nauczania dla zawodu górnik eksploatacji podziemnej.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
4
2. Wymagania wstępne
7
3. Cele kształcenia
8
4. Materiał nauczania
9
4.1. Podstawowe pojęcia z elektrotechniki
9
4.1.1. Materiał nauczania
9
4.1.2. Pytania sprawdzające
12
4.1.3. Ćwiczenia
12
4.1.4. Sprawdzian postępów
13
4.2. Źródła i rodzaje prądu
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
16
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
17
4.3. Elementy obwodu elektrycznego
18
4.3.1. Materiał nauczania
18
4.3.2. Pytania sprawdzające
20
4.3.3. Ćwiczenia
20
4.3.4. Sprawdzian postępów
21
4.4. Obwody prądu stałego i przemiennego
22
4.4.1. Materiał nauczania
22
4.4.2. Pytania sprawdzające
30
4.4.3. Ćwiczenia
31
4.4.4. Sprawdzian postępów
34
4.5. Pomiar podstawowych wielkości elektrycznych
35
4.5.1. Materiał nauczania
35
4.5.2. Pytania sprawdzające
37
4.5.3. Ćwiczenia
37
4.5.4. Sprawdzian postępów
38
4.6. Podstawowe pojęcia elektroniki
39
4.6.1. Materiał nauczania
39
4.6.2. Pytania sprawdzające
42
4.6.3. Ćwiczenia
43
4.6.4. Sprawdzian postępów
44
4.7. Podstawowe elementy elektroniczne
45
4.7.1. Materiał nauczania
45
4.7.2. Pytania sprawdzające
46
4.7.3. Ćwiczenia
47
4.7.4. Sprawdzian postępów
47
4.8. Elektronika w górnictwie podziemnym
48
4.8.1. Materiał nauczania
48
4.8.2. Pytania sprawdzające
49
4.8.3. Ćwiczenia
49
4.8.4. Sprawdzian postępów
50

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
4.9. Podstawowe układy automatyki przemysłowej
51
4.9.1. Materiał nauczania
51
4.9.2. Pytania sprawdzające
54
4.9.3. Ćwiczenia
54
4.9.4. Sprawdzian postępów
56
4.10. Układy i elementy automatycznej regulacji
57
4.10.1. Materiał nauczania
57
4.10.2. Pytania sprawdzające
63
4.10.3. Ćwiczenia
64
4.10.4. Sprawdzian postępów
64
4.11. Układy sterowania: pneumatycznego i elektropneumatycznego
oraz hydraulicznego i elektrohydraulicznego
65
4.11.1. Materiał nauczania
65
4.11.2. Pytania sprawdzające
70
4.11.3. Ćwiczenia
70
4.11.4. Sprawdzian postępów
72
4.12. Układy zasilania, sterowania i zabezpieczania
73
4.12.1. Materiał nauczania
73
4.12.2. Pytania sprawdzające
74
4.12.3. Ćwiczenia
74
4.12.4. Sprawdzian postępów
75
4.13. Układy automatyki w górnictwie podziemnym
76
4.13.1. Materiał nauczania
76
4.13.2. Pytania sprawdzające
77
4.13.3. Ćwiczenia
77
4.13.4. Sprawdzian postępów
78
5. Sprawdzian osiągnięć
79
6. Literatura
84

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy z zakresu analizowania układów
elektrycznych i automatyki przemysłowej.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – podstawowe wiadomości teoretyczne niezbędne do opanowania
treści jednostki modułowej,
−
zestaw pytań przydatny do sprawdzenia, czy już opanowałeś treści zawarte
w rozdziałach,
−
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć – przykładowy zestaw zadań i pytań. Pozytywny wynik
sprawdzianu potwierdzi, że dobrze pracowałeś podczas zajęć i że nabyłeś wiedzę
i umiejętności z zakresu tej jednostki modułowej,
−
literaturę uzupełniającą.
Z rozdziałem Pytania sprawdzające możesz zapoznać się:
−
przed przystąpieniem do rozdziału Materiał nauczania – poznając wymagania wynikające
z zawodu, a po przyswojeniu wskazanych treści, odpowiadając na te pytania sprawdzisz
stan swojej gotowości do wykonywania ćwiczeń,
−
po opanowaniu rozdziału Materiał nauczania, by sprawdzić stan swojej wiedzy, która
będzie Ci potrzebna do wykonywania ćwiczeń.
Kolejny etap to wykonywanie ćwiczeń, których celem jest uzupełnienie i utrwalenie
wiadomości z zakresu analizowania układów elektrycznych i automatyki przemysłowej.
Rozwiązując ćwiczenia przedstawione w poradniku lub zaproponowane przez
nauczyciela, będziesz obliczał napięcia i prądy w obwodach elektrycznych, montował
obwody elektryczne i elektroniczne, przeprowadzał pomiary podstawowych wielkości
elektrycznych w obwodach, poznawał symbole graficzne podstawowych elementów
elektrycznych i elektronicznych, analizował zasadę działania prostych układów automatyki
przemysłowej, rozróżniał układy i elementy automatycznej regulacji, analizował układy
sterowania hydraulicznego i pneumatycznego oraz poznawał układy regulacji w górnictwie.
Po wykonaniu zaplanowanych ćwiczeń, sprawdź poziom swoich postępów wykonując
Sprawdzian postępów.
Odpowiedzi „Nie” wskazują luki w Twojej wiedzy, informują Cię również, jakich
zagadnień jeszcze dobrze nie poznałeś. Oznacza to także powrót do treści, których
dostatecznie nie opanowałeś.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości będzie stanowiło
dla nauczyciela podstawę przeprowadzenia sprawdzianu poziomu przyswojonych wiadomości
i ukształtowanych umiejętności. W tym celu nauczyciel może posłużyć się zadaniami
testowymi.
W poradniku jest zamieszczony sprawdzian osiągnięć, który zawiera przykład takiego
testu oraz instrukcję, w której omówiono tok postępowania podczas przeprowadzania
sprawdzianu i przykładową kartę odpowiedzi, w której zakreśl właściwe odpowiedzi spośród
zaproponowanych.
Jednostka
modułowa:
„Analizowanie
układów
elektrycznych
i
automatyki
przemysłowej”, jest pierwszą z modułu: „Układy elektroniczne i maszyny elektryczne

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
w górnictwie podziemnym”. Zawiera ona dość szeroki zakres treści, często trudnych
do zrozumienia, gdyż wymaga od Ciebie powiązania wiedzy z wielu dziedzin.
Szczególnie ważne jest opanowanie umiejętności związanych z ładunkiem układów
elektrycznych i elektronicznych, rozróżniania wielkości elektrycznych i ich jednostek,
poprawnego posługiwania się terminologią techniczną, rozróżniania elementów obwodów,
wykorzystywania praw fizycznych i zależności matematycznych do obliczania parametrów
obwodów, łączenia prostych obwodów elektrycznych prądu stałego i przemiennego.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp i higieny
pracy oraz instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac.
Przepisy te poznałeś już podczas realizacji wcześniejszych jednostek modułowych.
Podczas realizacji ćwiczeń będą przypominane przepisy bhp, do których musisz się
stosować.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
Schemat układu jednostek modułowych
711[02].Z2
Układy elektroniczne i maszyny
elektryczne w górnictwie
podziemnym
711[02].Z2.01
Analizowanie układów
elektrycznych i automatyki
przemysłowej
711[02].Z2.02
Użytkowanie maszyn i urządzeń
elektrycznych w górnictwie
podziemnym

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
wykorzystywać wiadomości i umiejętności ukształtowane na zajęciach z fizyki,
−
korzystać z różnych źródeł informacji,
−
korzystać z jednostek układu SI,
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej i ochrony
stanowiska pracy.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
posłużyć się podstawowymi pojęciami z zakresu elektrotechniki,
−
odczytać podstawowe symbole i oznaczenia na typowych schematach układów
elektrycznych,
−
obliczyć proste obwody elektryczne,
−
naszkicować prosty obwód elektryczny,
−
odczytać wskazania przyrządów pomiarowych włączonych do obwodu elektrycznego
prądu stałego i przemiennego,
−
zmontować proste układy elektryczne według schematu,
−
odczytać schematy prostych układów elektrycznych i elektronicznych,
−
posłużyć się podstawowymi pojęciami z zakresu elektroniki,
−
określić zadania układów elektronicznych w górnictwie,
−
połączyć układy elektroniczne zgodnie ze schematem,
−
określić zakres stosowania, wady i zalety pneumatycznych i hydraulicznych urządzeń
automatyki,
−
wyjaśnić działanie elementów wykonawczych pneumatycznych i hydraulicznych,
−
wyjaśnić działanie prostych układów pneumatycznych i elektropneumatycznych,
−
wyjaśnić działanie prostych układów hydraulicznych i elektrohydraulicznych,
−
zbudować na podstawie schematu proste układy automatycznej regulacji,
−
rozróżnić elementy układów automatyki przemysłowej,
−
odczytać proste schematy układów automatycznej regulacji,
−
scharakteryzować zastosowanie układów regulacji w górnictwie podziemnym,
−
określić różnice w budowie układu zasilania i sterowania,
−
odczytać schematy układów sterowania i zasilania,
−
określić funkcje sterownika w układzie sterowania,
−
odróżnić wyłącznik od odłącznika,
−
wskazać zastosowanie prostowników, generatorów i wzmacniaczy elektronicznych
w górnictwie podziemnym,
−
wyjaśnić zadanie stycznika i przekaźnika w układach sterowniczych maszyn górniczych,
−
przestrzegać przepisy bezpieczeństwa i higieny pracy oraz ochrony przeciwpożarowej
podczas badania układów elektrycznych i elektronicznych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
4. MATERIAŁ NAUCZANIA
4.1. Podstawowe pojęcia z elektrotechniki
4.1.1. Materiał nauczania
Wielkości fizyczne
W elektrotechnice posługujemy się pojęciami: prądu elektrycznego, napięcia, rezystancji,
pojemności itd. Określają one cechę zjawiska fizycznego lub własność ciała, którą można
zmierzyć. Są to wielkości fizyczne. Zbiór wielkości fizycznych stanowi układ wielkości.
W układzie wielkości rozróżniamy wielkości niezależne od pozostałych – zwane
podstawowymi i określane na ich podstawie wielkości pochodne. Podstawową wielkością jest
np. prąd elektryczny.
Wielkości fizyczne można zmierzyć, czyli przyporządkować im pewną wartość. Wartość
danej wielkości fizycznej, której przyporządkujemy wartość liczbową równą jedności
nazywamy jednostką miary tej wielkości.
Zbiór jednostek nazywamy układem jednostek. W Polsce posługujemy się
Międzynarodowym Układem Jednostek Miar SI ( z franc. „système international”, tj. „układ
międzynarodowy” - tabela 1), w skrócie – układem SI. Układ SI obejmuje jednostki:
−
podstawowe, przyjęte niezależnie od siebie,
−
uzupełniające,
−
pochodne (np. pole powierzchni, siła, moc).
Tabela 1. Jednostki miar układu SI
Jednostka miary
Wielkość
nazwa
oznaczenie
Jednostki podstawowe
długość
metr
m
masa
kilogram
kg
czas
sekunda
s
prąd elektryczny
amper
A
temperatura
kelwin
K
liczność materii
mol
mol
światłość
kandela
cd
Jednostki uzupełniajace
kąt płaski
radian
rad
kąt bryłowy
steradian
sr
Gdy zachodzi potrzeba wyrażenia wielkości elektrycznych o małych lub dużych
wartościach posługujemy się dziesiętnymi wielokrotnościami i podwielokrotnościami
jednostek miar, które podawane są z konkretnym oznaczeniem (tabela 2).
Tabela 2. Wielokrotności i podwielokrotności jednostek miar najczęściej używanych w elektrotechnice
Nazwa przedrostka
Oznaczenie
Mnożnik
giga
G
10
9
mega
M
10
6
kilo
k
10
3
centy
c
10
-2
mili
m
10
-3
mikro
µ
10
-6
nano
n
10
-9
piko
p
10
-12
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Podstawowe wielkości elektryczne
Podstawowe wielkości elektryczne to: prąd elektryczny, napięcie i związany z nim
potencjał elektryczny, rezystancja, pojemność kondensatora, indukcyjność cewki (tabela 3).
Pojęciem prądu elektrycznego określamy zjawisko uporządkowanego ruchu ładunków
elektrycznych przez przekrój poprzeczny środowiska pod działaniem pola elektrycznego. Jest
to również wielkość określona jako stosunek elementarnego ładunku elektrycznego
δ
q
przenoszonego przez cząsteczki naładowane w ciągu pewnego czasu elementarnego
δ
t przez
dany przekrój poprzeczny środowiska, do tego czasu:
t
q
δ
δ
=
I
.
Wartość tego stosunku nazywamy natężeniem prądu elektrycznego. Jednostką natężenia
prądu elektrycznego jest amper [A].
t]
[
q]
[
]
[
δ
δ
=
I
=
=
s
C
[A]
Napięcie elektryczne to różnica potencjałów między dwoma punktami obwodu
elektrycznego, umożliwiająca przesunięcie ładunku elektrycznego, czyli przepływ prądu.
Wielkości charakteryzujące podstawowe elementy elektryczne to: rezystancja
dla rezystorów, indukcyjność dla cewek i pojemność dla kondensatorów.
Tabela 3. Podstawowe wielkości elektryczne
wielkość elektryczna
symbol
nazwa jednostki
oznaczenie jednostki
prąd elektryczny
I
amper
A
napięcie elektryczne
U
wolt
V
potencjał elektryczny
V
wolt
V
rezystancja
R
om
Ω
pojemność
C
farad
F
indukcyjność
L
henr
H
ładunek elektryczny
Q, q
kulomb
C
moc elektryczna
P
wat
W
energia elektryczna
W
dżul
J
Podział materiałów ze względu na właściwości elektryczne
Materiały używane w elektrotechnice mają różne własności elektryczne tzn. w różny
sposób przewodzą lub też nie przewodzą prądu elektrycznego. Ze względu na to dzielimy je
na: przewodniki, półprzewodniki, dielektryki.
Przewodniki bardzo dobrze przewodzą prąd elektryczny. Ze względu na budowę i rodzaj
nośników ładunku elektrycznego dzielimy je na przewodniki pierwszego i drugiego rodzaju.
Przewodniki pierwszego rodzaju to metale, ich stopy oraz węgiel. Przewodniki te nie
ulegają przy przepływie prądu zmianom chemicznym. Parametrem stosowanym do określenia
zdolności przewodzących przewodnika, jest konduktywność oznaczana
γ
. Jednostką
konduktywności jest simens na metr: [
γ
] =
m
1
m
S
⋅
Ω
=
.
Przewodniki drugiego rodzaju to roztwory zasad, kwasów i soli zwane elektrolitami;
stosowane są np. w akumulatorach. Przewodniki te ulegają podczas przepływu prądu
zmianom chemicznym.
Dielektryki zwane inaczej izolatorami nie wykazują zdolności przewodzenia prądu
elektrycznego. Parametrem charakterystycznym dla dielektryków jest przenikalność
elektryczna względna
ε
r
, która określa ile razy przenikalność elektryczna danego materiału
jest większa od przenikalności elektrycznej próżni. Jest to wielkość bezwymiarowa.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Dielektryki stosuje się w elektrotechnice do wykonywania części izolowanych
elementów, maszyn i urządzeń np. w kondensatorach jako warstwę oddzielającą metalowe
okładziny.
Półprzewodniki pod względem przewodnictwa prądu elektrycznego zajmują pośrednie
miejsce pomiędzy przewodnikami i dielektrykami. Rozróżniamy półprzewodniki samoistne
oraz domieszkowane. Powszechnie stosowane w elektronice są półprzewodniki
domieszkowane.
Ze względu na rodzaj domieszki rozróżniamy półprzewodniki typy N i typu P. Jeżeli
do pierwiastka IV grupy zostanie wprowadzony pierwiastek grupy V (tzw. domieszka
donorowa) powstanie półprzewodnik typy N, gdzie nośnikami większościowymi ładunku
elektrycznego sa elektrony. Natomiast wprowadzając do pierwiastka IV grupy pierwiastek
grupy III (tzw. domieszkę akceptorową), otrzymamy półprzewodnik typu P, gdzie nośnikami
większościowymi ładunku elektrycznego są jak gdyby puste miejsca (powstałe na skutek
domieszkowania), zwane dziurami, które mają ładunek elektryczny dodatni.
Półprzewodniki znalazły zastosowanie w elementach i scalonych układach
elektronicznych, takich jak diody, tranzystory, wzmacniacze operacyjne i w wielu innych.
Rezystancja przewodnika
Rys. 1. Element o długości l oraz polu przekroju poprzecznego S wykonany z przewodnika pierwszego rodzaju
[2, s. 20]
Parametrem charakterystycznym elementów (rys. 1) wykonanych z przewodników jest
rezystancja, oznaczana symbolem R. Zależy ona od wymiarów geometrycznych elementu
(długości l, pola przekroju poprzecznego S) oraz właściwości elektrycznych przewodnika,
określonych konduktywnością γ. Rezystancję danego elementu wyznacza się na podstawie
zależności:
S
l
R
⋅
=
γ
Jednostką rezystancji jest 1 om [1 Ω].
Odwrotność konduktywności oznaczamy przez ρ i nazywamy rezystywnością materiału
przewodzącego.
γ
1
ρ
=
Jednostką rezystywności jest [
m
⋅
Ω
].
Po uwzględnieniu rezystywności ρ zależność na rezystancję przyjmuje postać:
S
ρ
l
R
⋅
=
Zależność rezystancji od temperatury
Rezystancja elementu przewodzącego zależy od temperatury, w jakiej się on znajduje.
Jako normalną temperaturę przyjmujemy temperaturę T
0
= 293 K czyli t
0
= 20
°
C. Rezystancję
przewodników w tej temperaturze oznaczamy R
0
. Wraz ze wzrostem temperatury rezystancja
zmienia się. Względną zmianę rezystancji przewodnika przy wzroście temperatury o 1 K
określa temperaturowy współczynnik rezystancji
α
, jego jednostką jest [1/K].

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Dla temperatury T różnej od 293 K rezystancję R
T
obliczamy według przybliżonego
wzoru:
R
T =
R
0
[ 1 +
α
( T - T
0
)]
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Czym jest wielkość fizyczna?
2. Co to jest jednostka miary wielkości fizycznej?
3. Jaki układ jednostek miar obowiązuje w Polsce?
4. Jakie znasz podstawowe wielkości elektryczne, jakie mają jednostki?
5. Jak dzielimy materiały ze względu na właściwości elektryczne?
6. Czym charakteryzują się przewodniki pierwszego, a czym drugiego rodzaju?
7. Jakie znasz typy półprzewodników?
8. Od jakich parametrów zależy rezystancja elementu przewodzącego?
9. Co określa temperaturowy współczynnik rezystancji
α
?
4.1.3. Ćwiczenia
Ćwiczenie 1
Zapisz podane niżej wartości wielkości elektrycznych posługując się mnożnikiem
i jednostką podstawową: 200 mV; 4,7 pF; 10 kΩ; 22
µ
A, 0,45 MW.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) wykonać obliczenia,
3) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.
Ćwiczenie 2
Zapisz podane niżej wartości wielkości elektrycznych używając przedrostka przed
jednostką podstawową: 5000000 W; 2800
Ω
; 0,000000330 F; 0,140 H; 0,000065 A.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) wykonać obliczenia,
3) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Ćwiczenie 3
Oblicz wartość rezystancji przewodu wykonanego z miedzi. Przewód ma długość
l = 1 km, a pole przekroju poprzecznego S = 50 mm
2
, należy przyjąć rezystywność miedzi
przewodowej ρ =1,75 10
⋅
-8
Ωm. Przewód znajduje się w normalnej temperaturze.
Oblicz wartość rezystancji tego przewodu, gdy temperatura wzrośnie do 30
°
C. Należy przyjąć
współczynnik
α
równy 0,004 1/K.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) obliczyć rezystancję przewodu w temperaturze pokojowej,
3) obliczyć rezystancję przewodu w temperaturze 30
°
C,
4) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) podać przykłady wielkości fizycznych?
¨
¨
2) zastosować wielokrotności i podwielokrotności jednostek?
¨
¨
3) podać przykłady przewodników?
¨
¨
4) podać przykłady izolatorów?
¨
¨
5) opisać zjawisko prądu elektrycznego w półprzewodnikach?
¨
¨
6) obliczyć wartość rezystancji elementu na podstawie jego parametrów?
¨
¨
7) obliczyć wartość rezystancji w temperaturze różnej niż pokojowa?
¨
¨
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2. Źródła i rodzaje prądu
4.2.1. Materiał nauczania
Rodzaje źródeł energii elektrycznej
Każde źródło energii elektrycznej jest w istocie przetwornikiem innej postaci energii
w energię elektryczną. Ze względu na sposób tej przemiany źródła możemy podzielić
na: elektromechaniczne, chemiczne, cieplne i świetlne.
Źródła elektromechaniczne to przetworniki energii mechanicznej w elektryczną –
przykładem jest prądnica zwana też generatorem. Wykorzystuje ona zjawisko indukowania
się siły elektromotorycznej w przewodzie poruszającym się w polu magnetycznym.
Źródła chemiczne wytwarzają energię elektryczną dzięki reakcjom chemicznym.
Rozróżniamy kilka typów tych źródeł: ogniwa galwaniczne, akumulatory i ogniwa paliwowe.
Źródła cieplne zamieniają energię cieplną na energię elektryczną, poprzez wykorzystanie
zjawiska termoelektrycznego. Występuje ono na styku dwóch różnych metali
lub półprzewodników, gdy temperatura styku różni się od temperatury pozostałych części
zespolonych materiałów.
Źródła świetlne, czyli generatory fotoelektryczne (zwane też ogniwami
fotoelektrycznymi) wykorzystują zjawisko fotoelektryczne, w wyniku którego, energia
promieniowania świetlnego, zostaje zamieniona na energię elektryczną.
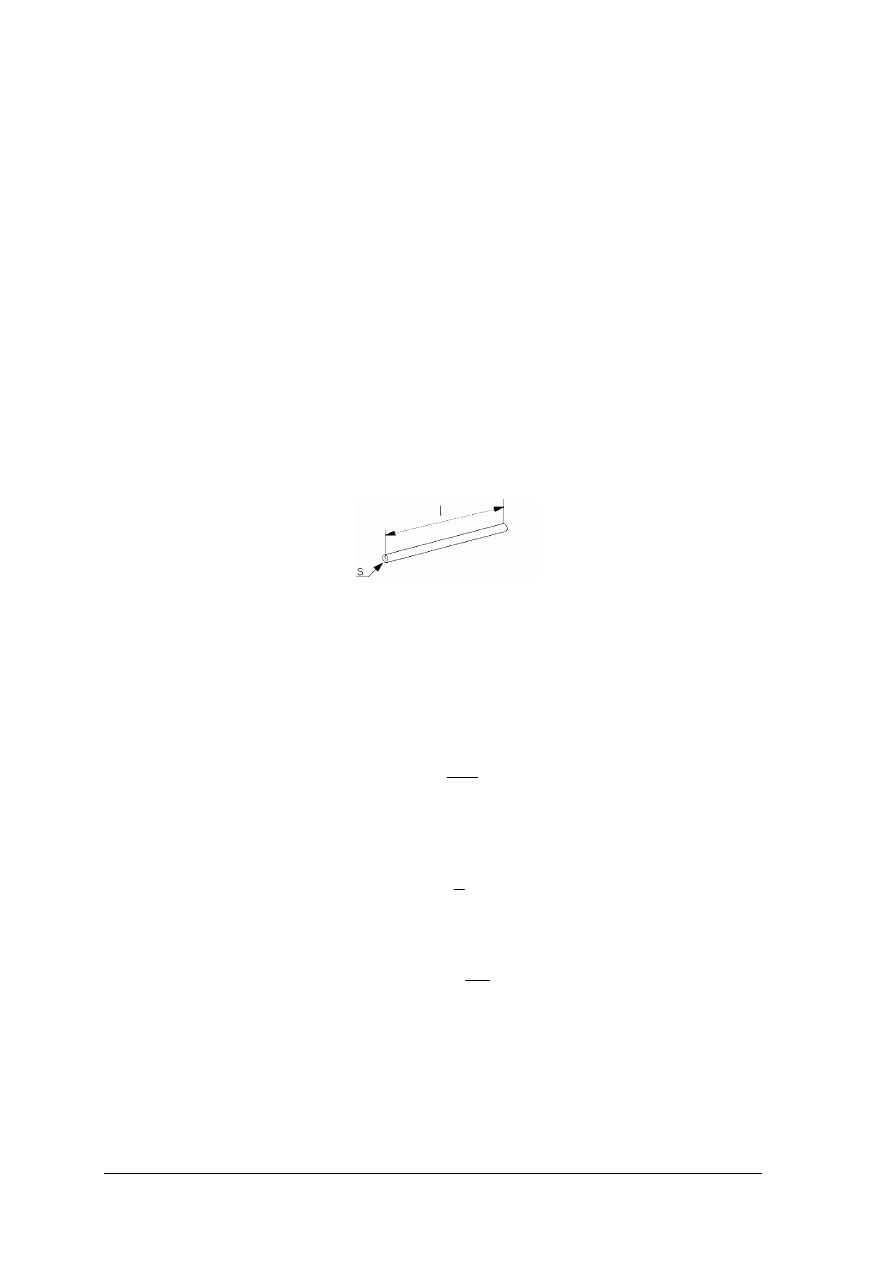
Schematy zastępcze źródła energii elektrycznej
Źródło energii elektrycznej zależnie od warunków pracy jest źródłem napięcia lub prądu.
Rzeczywiste źródło napięciowe w analizie obwodu reprezentuje zastępczy schemat
szeregowy (rys. 2a). Uwzględnia on idealne źródło napięciowe U (czyli takie, którego
rezystancja wewnętrzna jest równa 0) i połączoną z nim szeregowo rezystancję wewnętrzną
rzeczywistego źródła napięcia R
w
(reprezentującą rezystancję elementów, z jakich jest ono
wykonane).
W pewnych warunkach pracy rzeczywiste źródło energii elektrycznej można traktować
jako źródło prądowe - wówczas przedstawiane jest za pomocą zastępczego schematu
równoległego (rys. 2b). Przedstawia on idealne źródło prądowe I
z
, (czyli takie którego,
rezystancja wewnętrzna zdąża do
∞
) oraz połączoną z nim równolegle rezystancję
wewnętrzną rzeczywistego źródła prądowego R
w
(wynikająca z rezystancji jego elementów
konstrukcyjnych).
a)
b)
Rys. 2. Zastępczy schemat: a) szeregowy źródła napięcia [2, s. 45], b) równoległy źródła prądu [2, s. 47]
Każde rzeczywiste źródło napięcia można zastąpić rzeczywistym źródłem prądu.
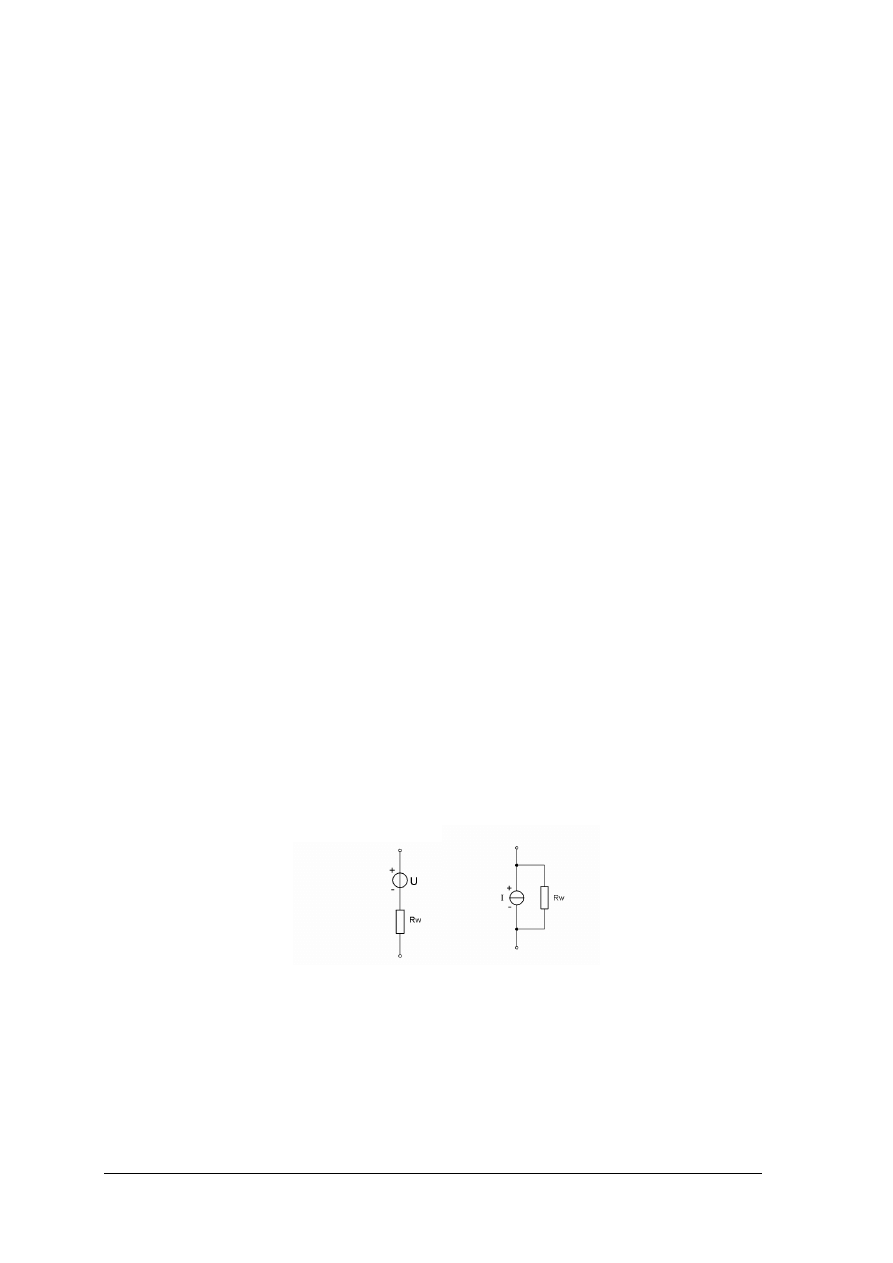
Stany pracy źródła energii elektrycznej
Stany pracy źródła energii elektrycznej są określone przez warunki pracy: prąd, jaki
płynie w obwodzie i dołączoną rezystancję obciążenia. Rozróżniamy trzy stany pracy źródła:
obciążenia, jałowy, zwarcia (rys. 3). Dotyczą one zarówno źródła prądowego, jak
i napięciowego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
a)
b)
c)
Rys. 3. Schemat układu ze źródłem napięcia w stanie a) obciążenia, b) jałowym, c) zwarcia [2, s.46]
Stan obciążenia źródła występuje wtedy, gdy do jego zacisków dołączony jest rezystor
o dowolnej wartości rezystancji R (przy czym R
≠
0 i R
≠
∞
).
W niektórych układach elektronicznych ważne jest, by moc pobierana ze źródła przez
obciążenie była jak największa; dzieje się tak w stanie dopasowania odbiornika do źródła.
Wartość rezystancji obciążenia R jest wówczas równa wartości rezystancji wewnętrznej
źródła R
w
.
Stan jałowy źródła to taki stan, gdy między zaciskami źródła jest przerwa, tzn. wartość
rezystancji obciążenia jest równa nieskończoności (R =
∞
). W obwodzie nie płynie prąd,
na zaciskach wyjściowych źródła napięcia pojawia się napięcie źródła idealnego U
0
=U
z
.
W stanie zwarcia źródła między jego zaciski włączona jest rezystancja obciążenia R
równa zero (R=0). Sytuacja taka odpowiada połączeniu zacisków źródła przewodem. Stan
zwarcia jest stanem niepożądanym, gdyż płynie wtedy w obwodzie maksymalny prąd I
z
(zwany prądem zwarcia), mogący uszkodzić źródło napięcia.
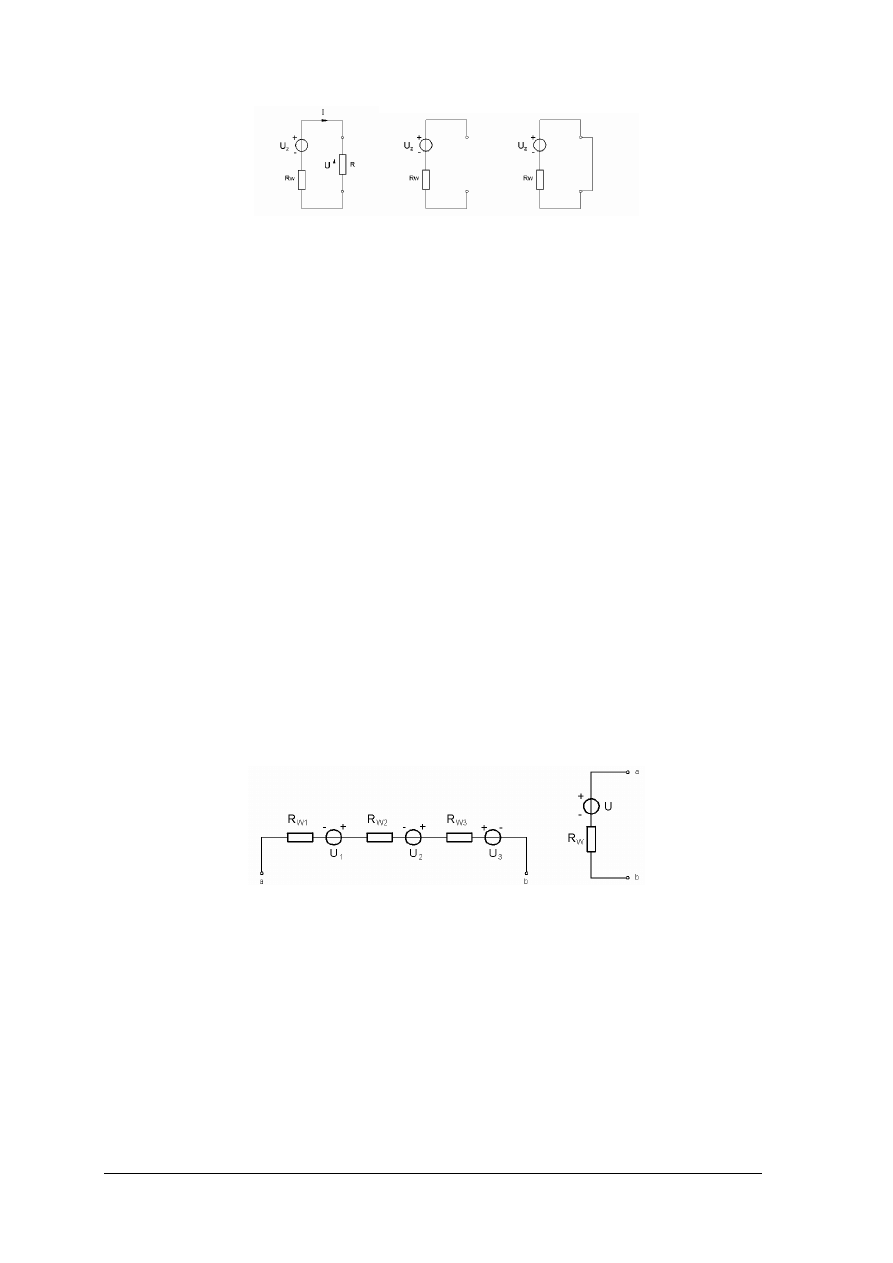
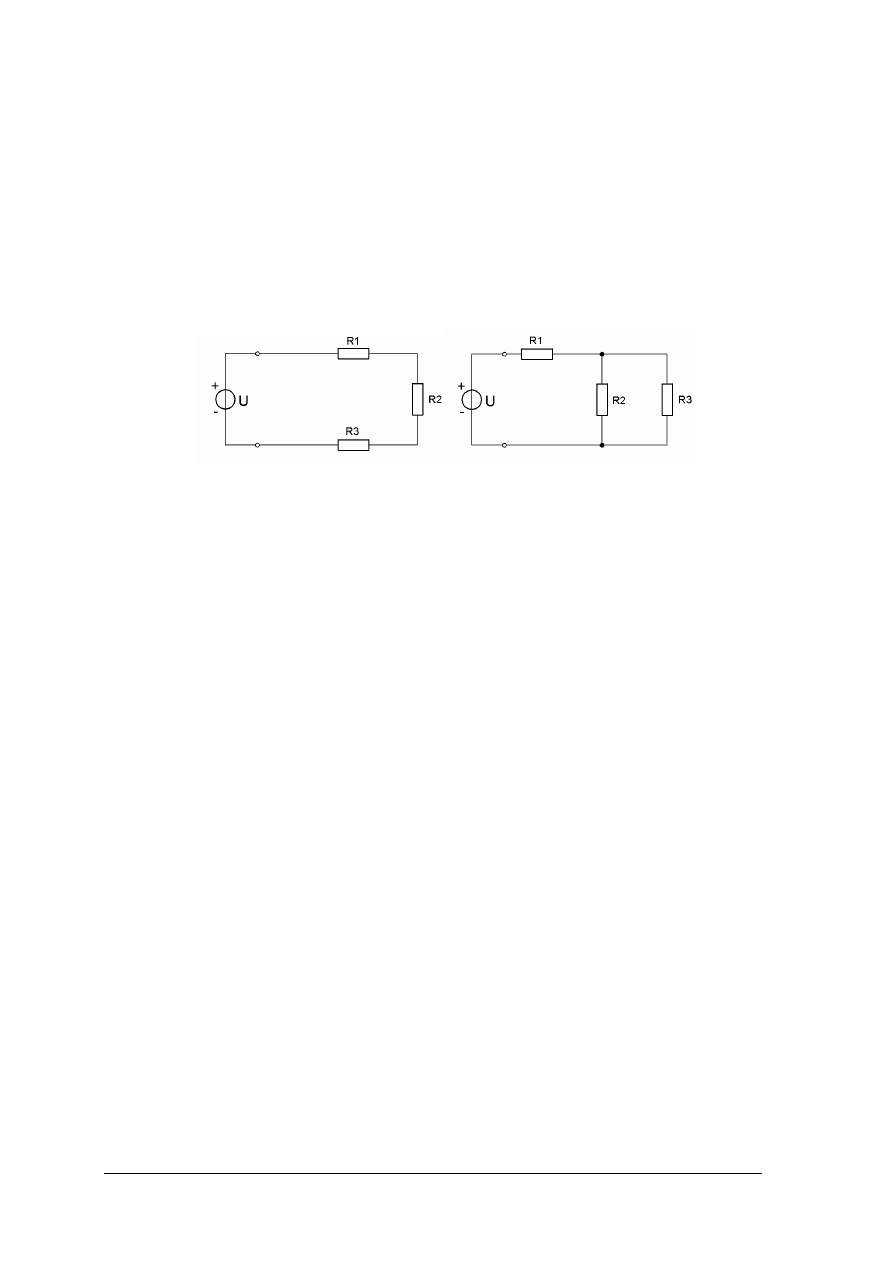
Połączenie szeregowe źródeł napięcia
Jeżeli w obwodzie elektrycznym jest kilka połączonych szeregowo źródeł napięcia,
można je zastąpić jednym zastępczym źródłem napięcia, którego napięcie źródłowe jest
równe sumie algebraicznej napięć źródłowych poszczególnych źródeł (rys. 4). Znak
„+”oznacza, że źródło oddaje energię do układu (kierunek jego napięcia jest zgodny
z kierunkiem prądu w gałęzi gdzie się znajduje), znak „-” oznacza, że źródło pobiera energię
z układu (kierunek jego napięcia jest przeciwny do kierunku prądu w gałęzi gdzie się
znajduje). Rezystancję wewnętrzną zastępczego źródła napięcia obliczamy tak jak rezystancję
zastępczą szeregowo połączonych rezystorów, czyli jest ona równa sumie rezystancji
zastępczych poszczególnych źródeł.
a)
b)
Rys. 4. Schemat układu: a) połączonych szeregowo źródeł napięcia, b) zastępczego źródła
W układzie z rys. 4 zastępcze napięcie źródłowe wynosi
3
2
1
U
U
U
U
−
+
=
, natomiast
rezystancja wewnętrzna tego źródła opisana jest zależnością
3
2
1
R
R
R
R
W
W
W
w
+
+
=
.
Prąd elektryczny w różnych środowiskach
Prąd elektryczny w przewodnikach pierwszego rodzaju, to uporządkowany ich ruch,
wywołany oddziaływaniem zewnętrznego pola elektrycznego.
Przewodniki drugiego rodzaju są cieczami. Posiadają jony dodatnie (kationy) oraz jony
ujemne (aniony), będące nośnikami ładunku elektrycznego. Ich uporządkowany ruch
wywołany oddziaływaniem zewnętrznego pola elektrycznego to prąd elektryczny.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Prąd elektryczny w półprzewodnikach jest uporządkowanym ruchem elektronów lub
dziur pod wpływem oddziaływania zewnętrznego pola elektrycznego.
Prąd elektryczny może przepływać przez gaz, jeżeli znajdują się w nim nośniki ładunku
elektrycznego – elektrony lub jony dodatnie, na które będzie działać zewnętrze pole
elektryczne. W normalnych warunkach gazy są dielektrykami. Nośniki ładunku elektrycznego
pojawiają się w gazie na skutek jonizacji. Jest to proces oderwania od elektrycznie obojętnego
atomu lub cząsteczki gazu jednego lub wielu elektronów. Do zaistnienia jonizacji potrzebna
jest energia dostarczona z zewnątrz; może to być energia cieplna (wtedy mówimy o jonizacji
termicznej). Pole elektryczne może dostarczyć atomom gazu dużej energii kinetycznej
i wówczas zachodzi zjawisko jonizacji zderzeniowej. Fotojonizacja zachodzi w gazie, jeśli
dostarczona zostanie do niego energia świetlna. Zjonizowany gaz przewodzi prąd
elektryczny, co obserwujemy jako wyładowanie elektryczne. Wyładowanie elektryczne może
być niesamoistne lub samoistne. To pierwsze, po usunięciu zewnętrznego czynnika
jonizującego zanika, drugie zaś nadal się utrzymuje.
Wyładowania samoistne mogą być:
–
jarzeniowe – gdy zjonizowany gaz świeci (wykorzystuje się je w reklamach świetlnych),
–
iskrowe – wywołane polem elektrycznym; towarzyszy mu przeskok iskry między
elektrodami (wykorzystywane w wysokonapięciowych miernikach),
–
ulotne – gdy gaz świeci jedynie w otoczeniu elektrody,
–
łukowe – wykorzystywane w celach oświetleniowych, występują tu efekty świetlne i cieplne.
Próżnia jest również dielektrykiem, ale w określonych warunkach przewodzi prąd
elektryczny. Przykładem wykorzystania tego zjawiska jest lampa elektronowa – dioda, która
posiada dwie elektrody: katodę, emitującą swobodne elektrony, oraz anodę przyciągającą je.
Warunkiem koniecznym do przepływu prądu jest pole elektryczne wywoływane różnicą
potencjałów pomiędzy anodą i katodą. Elektrony swobodne wyzwalane są z katody kosztem
energii cieplnej w wyniku termoemisji lub poprzez oddziaływanie na nią promieniowania
świetlnego, dzięki fotoemisji.
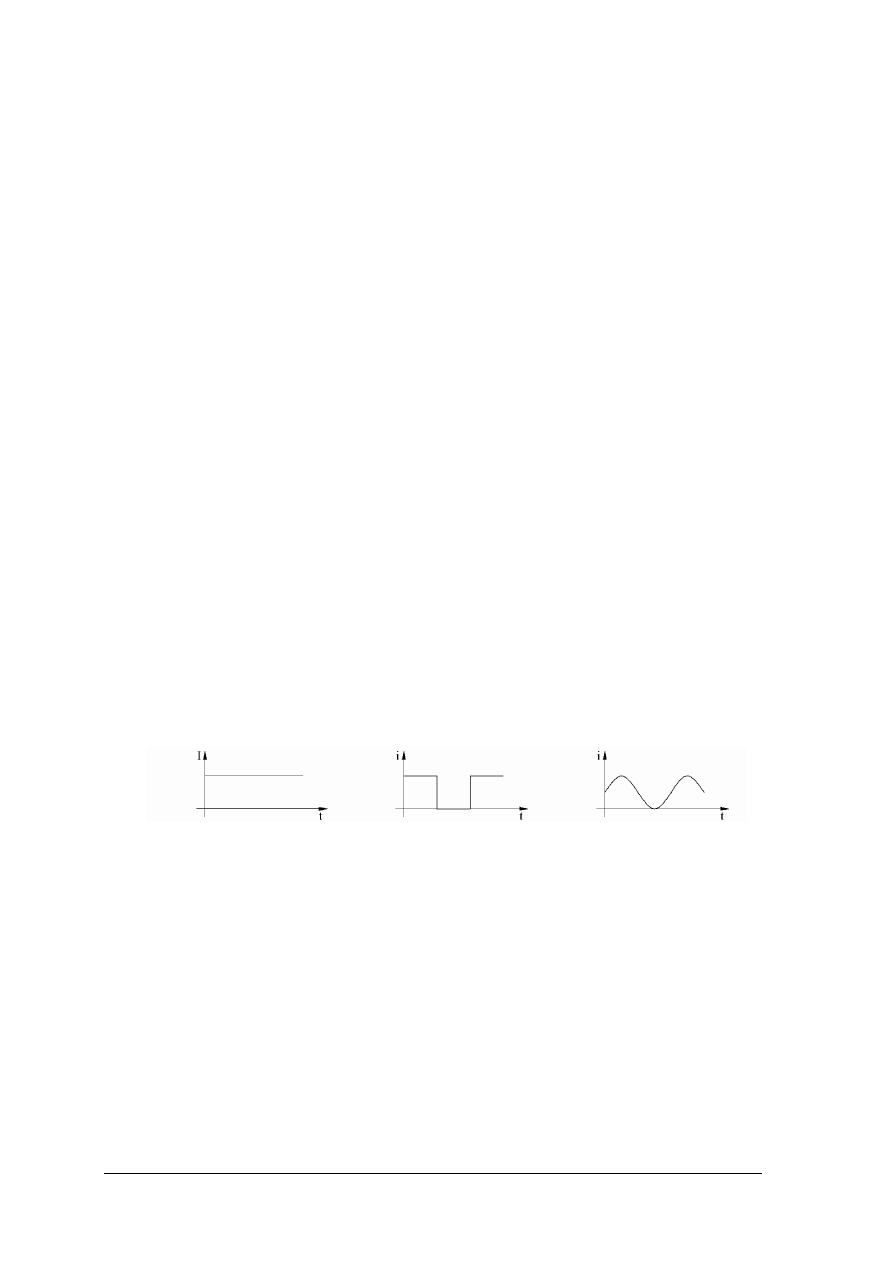
Prąd elektryczny może nie zmieniać się w czasie, wtedy mówimy, że jest to prąd stały.
Jeśli natomiast prąd w czasie zmienia swoją wartość, kierunek przepływu (zwany też
zwrotem) lub i wartość i kierunek przepływu, mówimy wtedy o prądzie zmiennym (rys. 5).
a)
b)
c)
Rys. 5. Wykresy czasowe a) prądu stałego; b), c) prądu zmiennego.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje prądu elektrycznego?
2. Na czym polega wyładowanie elektryczne?
3. Jaka jest różnica pomiędzy idealnym a rzeczywistym źródłem energii elektrycznej?
4. Jakie znasz stany pracy źródła?
5. Co oznacza stan dopasowania odbiornika do źródła?
6. Jakie znasz źródła elektromechaniczne?
7. Jak znasz chemiczne źródła energii elektrycznej?
8. Jak oblicza się wartość zastępczego napięcia źródłowego dowolnej liczby źródeł napięcia
połączonych szeregowo?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.3. Ćwiczenia
Ćwiczenie 1
Znajdź zależności między parametrami rzeczywistego źródła napięcia i parametrami
rzeczywistego źródła prądu.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) narysować schematy zastępcze źródła: szeregowy i równoległy,
3) zanalizować narysowane schematy, wykorzystując prawo Ohma i prawa Kirchhoffa,
4) zapisać wyrażenie wynikające z II prawa Kirchhoffa dla schematu szeregowego,
5) zapisać wyrażenie wynikające z I prawa Kirchhoffa dla schematu równoległego,
6) przekształcić matematycznie i porównać zapisane wyrażenia,
7) zapisać zależności między napięciem a prądem źródłowym oraz rezystancjami
zastępczymi,
8) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
literatura z rozdziału 6.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) narysować przebiegi czasowe prądu stałego i zmiennego?
¨
¨
2) opisać zjawisko prądu elektrycznego w półprzewodnikach?
¨
¨
3) opisać zjawisko prądu elektrycznego w gazach?
¨
¨
4) narysować szeregowy schemat zastępczy źródła napięcia?
¨
¨
5) narysować równoległy schemat zastępczy źródła prądu?
¨
¨
6) wyjaśnić działanie źródła napięcia w stanie jałowym?
¨
¨
7) wyjaśnić działanie źródła napięcia w stanie obciążenia?
¨
¨
8) wyjaśnić, dlaczego stan dopasowania jest najkorzystniejszym stanem pracy
źródła?
¨
¨
9) wyjaśnić, dlaczego stan zwarcia jest niebezpieczny?
¨
¨
10) przekształcić zastępczy schemat szeregowy źródła napięcia w zastępczy
schemat równoległy?
¨
¨
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.3. Elementy obwodu elektrycznego
4.3.1. Materiał nauczania
Budowa obwodu elektrycznego prądu stałego. Elementy obwodu elektrycznego
Obwód elektryczny tworzą elementy elektryczne połączone ze sobą tak, by tworzyły
przynajmniej jedną drogę zamkniętą, umożliwiającą przepływ prądu elektrycznego.
Obwody elektryczne dzielą się na obwody nierozgałęzione (rys. 6a), czyli takie,
w których płynie tylko jeden prąd i rozgałęzione (rys. 6b), w których płynie kilka prądów.
a)
b)
Rys. 6. Schemat obwodu elektrycznego a) nierozgałęzionego (połączenie szeregowe), b) rozgałęzionego
W strukturze obwodu elektrycznego można wyróżnić: gałęzie, węzły i oczka. Gałąź
obwodu elektrycznego może zawierać dowolną ilość elementów, połączonych ze sobą
szeregowo (może mieć też tylko jeden element). Charakterystyczne dla gałęzi jest to, że przez
wszystkie jej elementy przepływa ten sam prąd. Końcówkę gałęzi, zwaną zaciskiem, do której
przyłączone są inne gałęzie nazywamy węzłem. Oczko obwodu elektrycznego stanowi zbiór
połączonych ze sobą gałęzi, które tworzą drogę zamkniętą dla przepływu prądu.
Charakterystyczne dla oczka jest to, że usunięcie dowolnej gałęzi uniemożliwi przepływ
prądu (nie będzie istniała ani jedna droga zamknięta dla przepływu prądu).
Możemy zatem zauważyć, że:
–
obwód elektryczny rozgałęziony to taki, w którym jest kilka połączonych ze sobą gałęzi,
–
obwód nierozgałęziony posiada jedną gałąź,
–
obwód nierozgałęziony stanowi jedno oczko.
Elementy obwodu elektrycznego można sklasyfikować w czterech grupach, jako:
–
elementy źródłowe, zwane inaczej aktywnymi lub czynnymi,
–
elementy odbiorcze zwane inaczej pasywnymi lub biernymi,
–
elementy pomocnicze, takie jak przewody łączące, wyłączniki, bezpieczniki itp.,
–
przyrządy pomiarowe, takie jak woltomierze, amperomierze itp.
Elementy bierne można podzielić na trzy grupy: rezystory, kondensatory i cewki
oraz przetworniki energii elektrycznej.
W rezystorach przepływowi prądu towarzyszy zamiana energii elektrycznej w ciepło.
Zjawisko to może być to wykorzystywane np. w urządzeniach grzejnych lub być
niepożądanym.
Kondensatory gromadzą energię elektryczną jako energię pola elektrycznego. Cewki
natomiast gromadzą energię elektryczną w postaci energii pola magnetycznego.
Przetwornikami energii elektrycznej są między innymi silniki elektryczne, gdzie energia
elektryczna zamieniana jest na mechaniczną.
Bezpieczniki służą do zabezpieczenia obwodów i urządzeń elektrycznych przed
przeciążeniami i zwarciami (czyli przed przepływem prądu o zbyt dużej wartości) lub
przekroczeniem temperatury progowej. Wartość ich rezystancji w obwodzie elektrycznym
jest pomijalnie mała.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Łączniki stosowane są do załączania i wyłączania obwodów elektrycznych, mogą
również stanowić elementy ochronne jak np. wyłączniki różnicowoprądowe.
Każdy element obwodu elektrycznego stanowi jego składową część, niepodzielną
ze względu na swoje własności. W literaturze technicznej i dokumentacji wszystkich
urządzeń elektrycznych umieszczane są schematy obwodów elektrycznych, które są ich
graficznym odwzorowaniem. Schemat informuje z jakich elementów składa się obwód
elektryczny i w jaki sposób są one połączone.
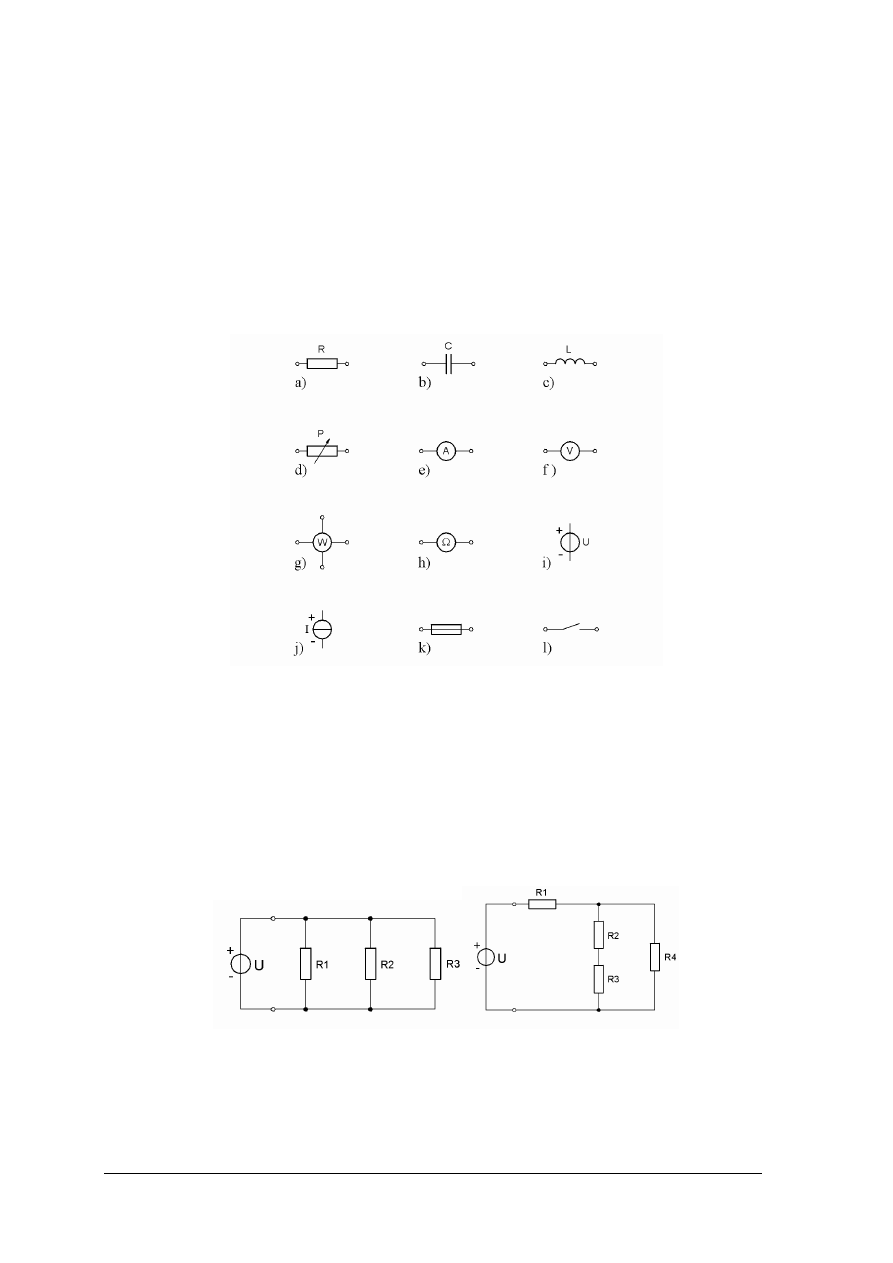
Wszystkie elementy elektryczne posiadają swoje symbole graficzne (rys. 7), za pomocą
których przedstawiane są na schemacie.
Rys. 7. Symbol podstawowych elementów elektrycznych: a) rezystora, b) kondensatora, c) cewki,
d) potencjometru, e) amperomierza, f) woltomierza, g) watomierza, h) omomierza, i) źródła napięcia
stałego, j) źródła prądu stałego, k) bezpiecznika, l) łącznika. [2, s. 39]
Typy połączeń elementów w obwodzie elektrycznym prądu stałego
Elementy obwodu elektrycznego prądu stałego mogą być połączone na trzy sposoby:
szeregowo, równolegle lub mieszanie.
W połączeniu szeregowym przez wszystkie elementy płynie ten sam prąd. Obwód
nierozgałęziony jest przykładem połączenia szeregowego.
Elementy połączone równolegle włączone są pomiędzy tę samą parę węzłów, zatem
występuje na nich to samo napięcie (rys. 8a).
a)
b)
Rys. 8. Schemat obwodu prądu stałego z elementami połączonymi a) równolegle, b) w sposób mieszany
Połączenie mieszane elementów elektrycznych występuje wówczas, gdy w tym samym
obwodzie część elementów połączona jest szeregowo, część natomiast równolegle (rys. 8b).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak dzielimy obwody elektryczne?
2. Jak nazywa się graficzny obraz obwodu elektrycznego?
3. Jak można sklasyfikować elementy elektryczne?
4. Jakie znasz rodzaje połączeń elementów w obwodach elektrycznych?
5. Do czego w obwodzie elektrycznym służy bezpiecznik?
6. Do czego w obwodzie elektrycznym służy łącznik?
7. Jaki jest symbol graficzny woltomierza?
8. Jaki miernik służy do pomiaru prądu?
4.3.3. Ćwiczenia
Ćwiczenie 1
Narysuj schemat rozgałęzionego obwodu prądu stałego złożonego z czterech rezystorów
oraz jednego źródła napięcia stałego. Następnie zaznacz i opisz wszystkie jego węzły, gałęzie
oraz oczka.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) narysować schemat rozgałęzionego obwodu prądu stałego,
3) zaznaczyć na nim węzły, gałęzie i oczka.
Wyposażenie stanowiska pracy:
–
papier formatu A4,
−
przybory do pisania w różnych kolorach,
−
literatura z rozdziału 6.
Ćwiczenie 2
Narysuj schemat rozgałęzionego obwodu prądu stałego złożonego z sześciu rezystorów
oraz jednego źródła napięcia stałego połączonych w sposób mieszany. Następnie zaznacz
elementy połączone szeregowo i elementy połączone równolegle. Uzasadnij swoje rozwiązanie.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) narysować schemat rozgałęzionego obwodu prądu stałego z elementami połączonymi
w sposób mieszany,
3) zaznaczyć na wykonanym schemacie elementy połączone szeregowo i elementy
połączone równolegle,
4) zaprezentować wyniki swojej pracy.
Wyposażenie stanowiska pracy:
–
papier formatu A4,
−
przybory do pisania,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) narysować symbole wybranych elementów elektrycznych?
2) narysować
schemat
przykładowego
nierozgałęzionego
obwodu
elektrycznego?
3) narysować schemat przykładowego rozgałęzionego obwodu elektrycznego?
4) wskazać węzły, gałęzie i oczka na schemacie rozgałęzionego obwodu
elektrycznego?
5) rozpoznać elementy połączone szeregowo na schemacie obwodu prądu
stałego?
6) rozpoznać elementy połączone równolegle na schemacie obwodu prądu
stałego?
7) rozpoznać na schemacie elektrycznym symbol bezpiecznika?
8) rozpoznać na schemacie elektrycznym symbol łącznika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
4.4. Obwody prądu stałego i przemiennego
4.4.1. Materiał nauczania
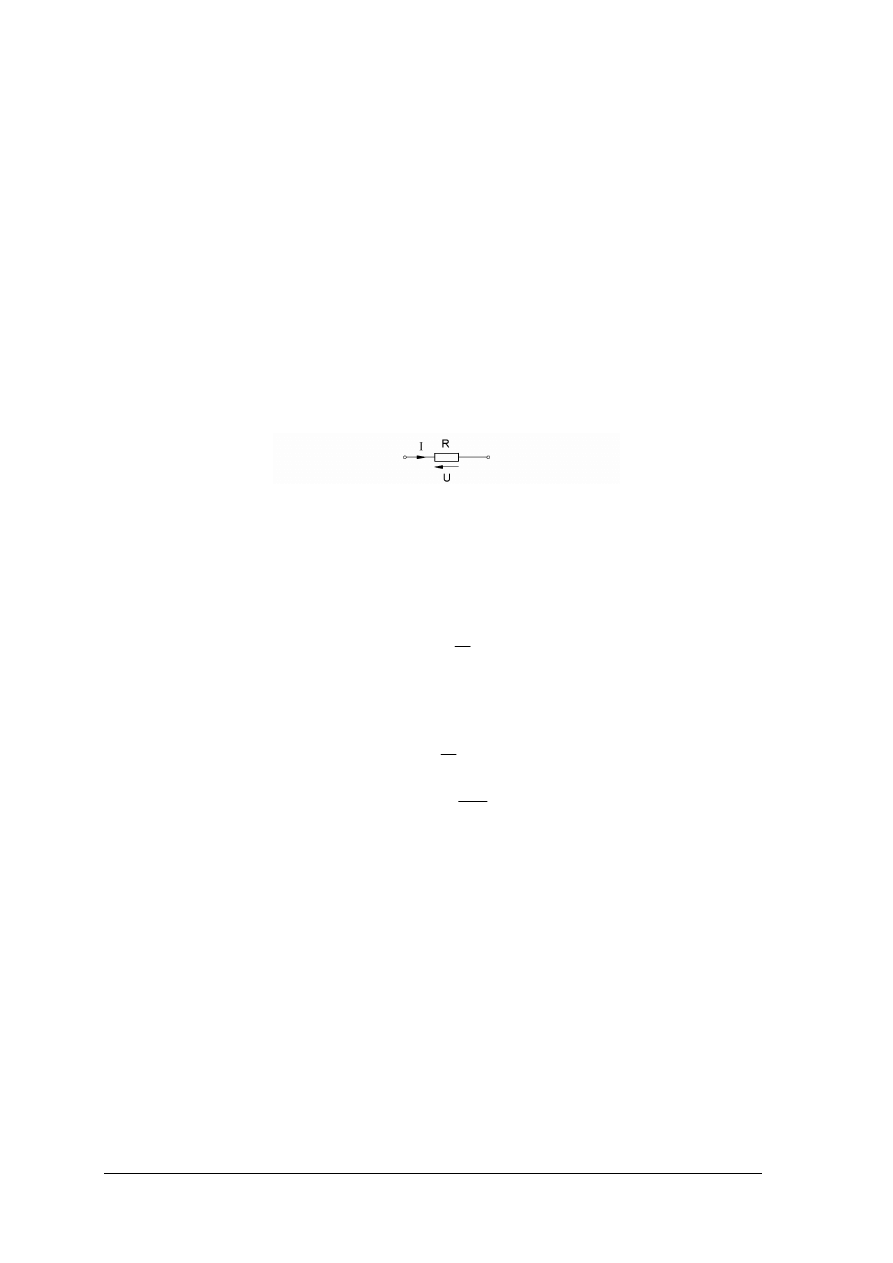
Prawa obwodu elektrycznego
Prawo Ohma
Prawo Ohma wyraża zależność pomiędzy prądem I, napięciem U oraz rezystancją R
(rys. 9). W obwodach prądu stałego, kierunek prądu oznaczamy od bieguna dodatniego źródła
napięcia do bieguna ujemnego ( od „+” do „–”) i opisujemy wielką literą I. Elementy
źródłowe posiadają dwa zaciski, którym odpowiadają potencjały: wyższy (+) i niższy (–).
Kierunek napięcia na elementach źródłowych jest zgodny z kierunkiem prądu.
Napięcie odbiornikowe (spadek napięcia na odbiorniku) oznaczamy strzałką, której grot
skierowany jest w stronę potencjału wyższego, zatem kierunek napięcia na odbiorniku
jest przeciwnie skierowany do płynącego przezeń prądu.
Rys. 9. Sposób strzałkowania prądu i napięcia na rezystorze [2, s. 43]
Prawo Ohma mówi, że spadek napięcia U na elemencie odbiorczym jest proporcjonalny
do iloczynu rezystancji R tego elementu i prądu I płynącego przez niego.
U = R I
Odwrotnością rezystancji R jest konduktacja G wyrażana w simensach (symbol S).
R
1
G
=
[G] = S
Po uwzględnieniu tej zależności, prawo Ohma dla przypadku przedstawionego na rysunku
ma postać:
G
I
U
=
/ G
G
G
I
U
G
⋅
=
⋅
G
U
I
⋅
=
I prawo Kirchhoffa
Pierwsze prawo Kirchhoffa mówi, że dla każdego węzła obwodu elektrycznego suma
algebraiczna prądów jest równa zeru.
∑
=
α
α
0
I
Symbol
α
odpowiada indeksom prądów w danym węźle. Suma algebraiczna oznacza,
że do równania podstawia się wartości prądów ze znakami, zależnymi od ich kierunku. Prądy
dopływające do węzła posiadają znak „+”, natomiast odpływające znak „–”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
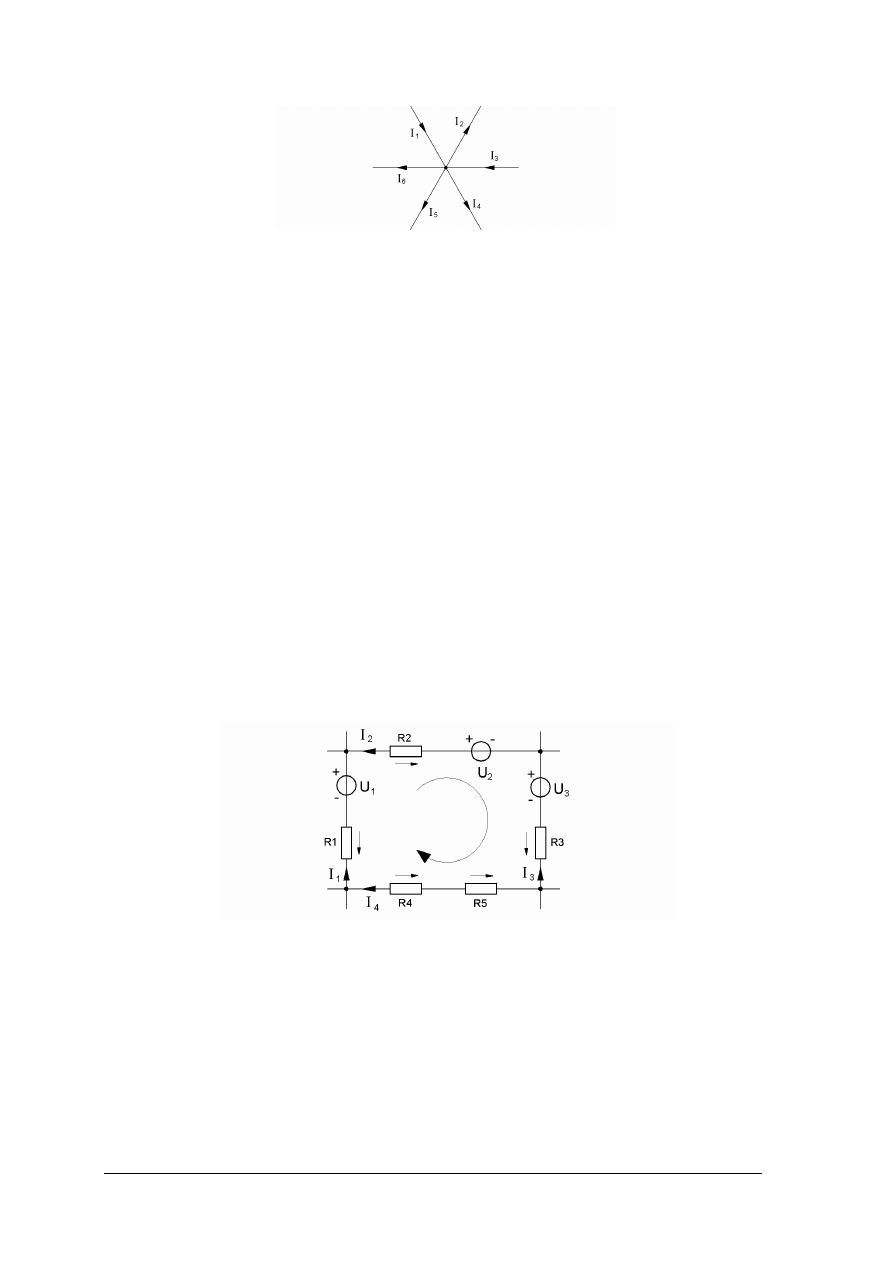
Rys. 10. Przykładowy węzeł obwodu elektrycznego
Na rys. 10, pokazano przykładowy węzeł obwodu elektrycznego z zaznaczonymi kierunkami
prądów: prądy I
1
oraz I
3
skierowane są do węzła , zatem mają znak „+”, natomiast prądy I
2
, I
4
,
I
5
i I
6
odpływają z węzła, opatrzymy je zatem znakiem „–”. Dla przedstawionego węzła można
napisać równanie w myśl I prawa Kirchhoffa:
0
I
I
I
I
I
I
6
5
4
2
3
1
=
−
−
−
−
+
Równanie to możemy przekształcić do postaci:
6
5
4
2
3
1
I
I
I
I
I
I
+
+
+
=
+
= 0
Zatem I prawo Kirchhoffa wynikające z powyższej postaci można przedstawić w następujący
sposób: dla każdego węzła obwodu elektrycznego suma prądów dopływających do węzła jest
równa sumie prądów odpływających od węzła.
II prawo Kirchhoffa
II prawo Kirchhoffa mówi, że w każdym oczku obwodu elektrycznego prądu stałego
suma algebraiczna napięć źródłowych i odbiornikowych jest równa zeru.
β
α
β
β
α
∑
∑
+
I
R
U
= 0
U
α
oznacza napięcia źródłowe, natomiast wyrażenie R
β
I
β
oznacza napięcia odbiornikowe
występujące na rezystancjach danego oczka. Symbole
α
,
β
odpowiadają indeksom źródeł
napięcia, rezystorów i prądów.
Rys. 11. Przykładowe oczko obwodu rozgałęzionego prądu stałego
Rysunek 11 przedstawia przykładowe oczko obwodu rozgałęzionego prądu stałego,
składające się z czterech gałęzi (w każdej płynie inny prąd). Przyjmujemy pewien obiegowy
zwrot oczka, który zaznaczamy strzałką wewnątrz oczka (na rysunku oznaczony zaokrągloną
strzałką umieszczoną wewnątrz oczka).
Zapisujemy równanie wynikające z II prawa Kirchhoffa, rozpoczynając rozpatrywanie
od dowolnego punktu oczka, zgodne z przyjętym zwrotem obiegowym. Jeśli strzałka napięcia
źródłowego lub odbiornikowego jest zgodna ze zwrotem obiegowym oczka, to napięcie
to, zapisujemy w równaniu ze znakiem „+”, a jeżeli jest przeciwna to ze znakiem „–”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Dla rozpatrywanego przez nas oczka równanie przyjmuje postać:
0
R
I
R
I
R
I
R
I
U
U
R
I
U
1
1
5
4
4
4
3
3
3
2
2
2
1
=
−
−
−
+
−
−
+
Jeżeli napięcia odbiornikowe przeniesiemy na drugą stronę równania, to
U
1
–U
2
– U
3
=
I
1
R
1
– I
2
R
2
– I
3
R
3
+ I
4
R
4
+ I
4
R
5
Zatem II prawo Kirchhoffa wynikajace z powyższej postaci równania można
sformułować nastepująco: w dowolnym oczku obwodu elektrycznego prądu stałego suma
algebraiczna napięć źródłowych jest równa sumie algebraicznej napięć odbiornikowych.
W oczku bez źródeł napięcia suma algebraiczna napięć odbiornikowych jest równa zeru.
II prawo Kirchhoffa stosuje się również do analizy obwodów elektrycznych
nierozgałęzionych, ponieważ taki obwód to jedno oczko.
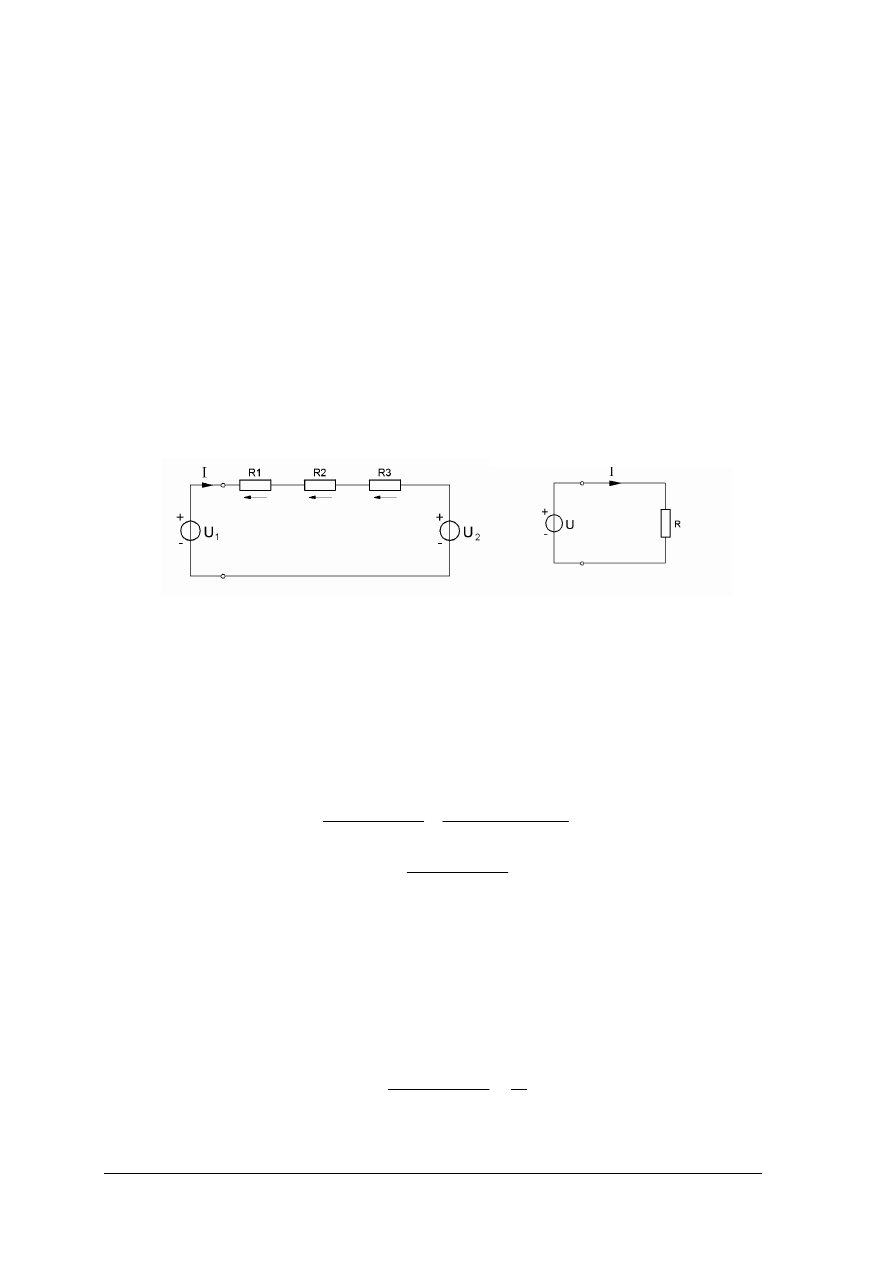
Połączenie szeregowe rezystorów i źródeł napięcia
W połączeniu szeregowym przez wszystkie elementy obwodu przepływa ten sam prąd.
Obwód taki stanowi jedno oczko. Obwód szeregowo połączonych źródeł napięcia
i rezystancji zastąpić obwodem równoważnym, tzn. że płynie w nim taki sam prąd
I, zawierającym zastępcze źródło napięcia U i zastępczą rezystancję R.
a)
b)
Rys. 12. Schemat układu: a) szeregowo połączonych elementów, b) równoważnego
Dla obwodu z rysunku 12 równanie II prawa Kirchhoffa ma postać:
0
IR
IR
IR
U
U
3
2
1
2
1
=
−
−
−
−
Chcąc obliczyć wartość prądu I płynącego w obwodzie dokonujemy przekształceń:
3
2
1
2
1
IR
IR
IR
U
U
+
+
=
−
)
R
R
I(R
U
U
3
2
1
2
1
+
+
=
−
/:
)
R
R
(R
3
2
1
+
+
)
R
R
(R
)
R
R
(R
I
R
R
R
U
U
3
2
1
3
2
1
3
2
1
2
1
+
+
+
+
⋅
=
+
+
−
3
2
1
2
1
R
R
R
U
U
I
+
+
−
=
Licznik powyższego wyrażenia zawiera sumę algebraiczną źródeł napięcia w rozpatrywanym
układzie, którą można zastąpić symbolem U oznaczającym zastępcze źródło napięcia:
2
1
U
U
U
−
=
Mianownik natomiast zawiera sumę rezystancji połączonych szeregowo w rozpatrywanym
układzie, którą można zastąpić symbolem R oznaczającym zastępczą rezystancję:
3
2
1
R
R
R
R
+
+
=
Wzór na prąd I ma postać:
3
2
1
2
1
R
R
R
U
U
I
+
+
−
=
R
U
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Dowolną liczbę rezystorów połączonych szeregowo można zastąpić rezystancją
zastępczą równą sumie rezystancji poszczególnych rezystorów.
Dowolną liczbę źródeł napięcia połączonych szeregowo można zastąpić zastępczym
źródłem napięcia, którego napięcie źródłowe równe będzie sumie algebraicznej (czyli
z uwzględnieniem zwrotu) poszczególnych napięć źródłowych.
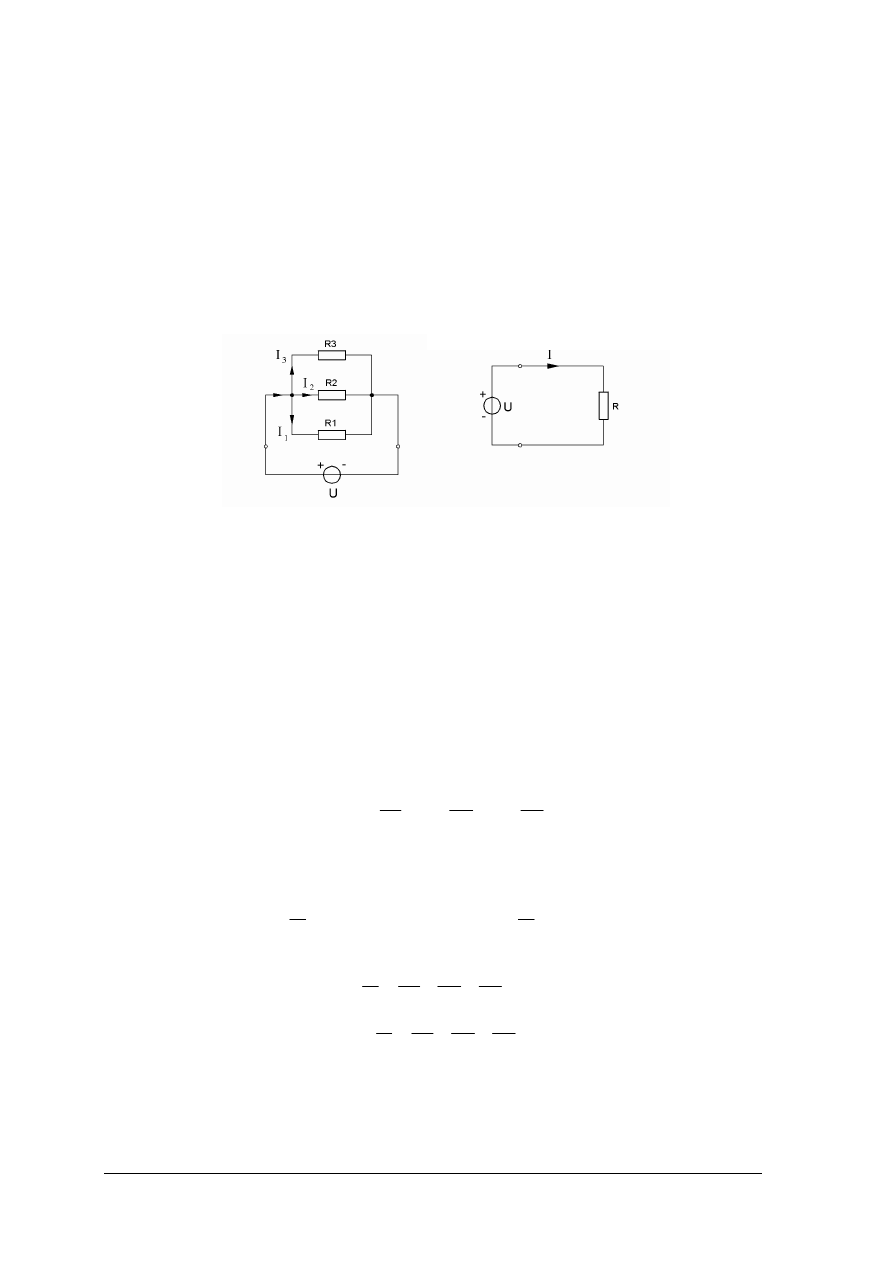
Połączenie równoległe rezystorów i źródeł napięcia
Rezystory połączone równolegle występują w obwodach rozgałęzionych.
Obwód zawierający rezystory połączone równolegle można zastąpić równoważnym,
obwodem zawierającym jeden rezystor o rezystancji zastępczej R.
a)
b)
Rys. 13. Schemat obwodu: a) z rezystorami połączonymi równolegle, b) równoważnego
W obwodzie rozgałęzionym z rys. 13 rezystory R
1,
R
2
,
R
3
włączone są między te same
węzły.
Na każdej z tych gałęzi zatem występuje to samo napięcie. Właściwością połączenia
równoległego jest to, że wszystkie elementy są włączone między tę samą parę węzłów,
zatem na zaciskach elementów występuje to samo napięcie.
Dla rozpatrywanego obwodu równanie I prawa Kirchhoffa ma postać:
0
I
I
I
I
3
2
1
=
−
−
−
3
2
1
I
I
I
I
+
+
=
Na każdym rezystorze jest ten sam spadek napięcia:
1
1
R
I
U
=
,
2
2
R
I
U
=
,
3
3
R
I
U
=
Wartości prądów w poszczególnych gałęziach, można obliczyć na podstawie prawa
Ohma:
1
1
R
U
I
=
,
2
2
R
U
I
=
,
3
3
R
U
I
=
Obwód zawierający rezystory połączone równolegle i obwód z ich rezystancją zastępczą
R są sobie równoważne, zatem w gałęziach z napięciem zasilającym U płynie ten sam prąd I,
możemy więc napisać:
R
U
I
=
oraz
3
2
1
I
I
I
I
+
+
=
, zatem
3
2
1
I
I
I
R
U
+
+
=
Uwzględniając zależności na prądy w poszczególnych gałęziach:
3
2
1
R
U
R
U
R
U
R
U
+
+
=
/: U
3
2
1
R
1
R
1
R
1
R
1
+
+
=
W ogólnym przypadku odwrotność rezystancji zastępczej dowolnej ilości rezystorów
połączonych równolegle równa się sumie odwrotności rezystancji poszczególnych
rezystorów. Po wprowadzeniu pojęcia konduktancji G, będącej odwrotnością rezystancji,
równanie opisujące rezystancję zastępczą przyjmie postać:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
1
1
R
1
G
=
,
2
2
R
1
G
=
,
3
3
R
1
G
=
zatem
3
2
1
G
G
G
G
+
+
=
W ogólnym przypadku konduktancja zastępcza dowolnej ilości rezystorów połączonych
równolegle równa się sumie konduktancji poszczególnych rezystorów.
Połączenie równoległe źródeł napięcia można zastąpić również jednym zastępczym
źródłem napięcia. Szczegółowo sposób zamiany opisano w literaturze uzupełniającej
[3, s. 53, 54].
Połączenie mieszane rezystorów
Rys. 14. Schemat obwodu z rezystorami połączonymi w sposób mieszany
W rozgałęzionych obwodach elektrycznych występują połączenia mieszane rezystorów
(rys. 14). Takie połączenia można również zastąpić rezystancją zastępczą. Jej wartość należy
obliczyć dokonując analizy połączeń polegającej na wyodrębnieniu elementów połączonych
równolegle lub szeregowo i obliczeniu ich rezystancji zastępczej.
Moc prądu stałego
Na skutek przepływu prądu w obwodzie elektrycznym elementy źródłowe oddają
lub pobierają energię elektryczną, natomiast elementy odbiorcze, zawsze pobierają energię
elektryczną.
Moc P pobierana przez elementy odbiorcze jest równa iloczynowi prądu I
przepływającego przez element i spadku napięcia U na nim:
I
U
P
⋅
=
[P] = W
Jednostką mocy jest wat [W].
Jeżeli prąd I lub napięcie U obliczamy z prawa Ohma, zależność opisująca moc przyjmie
jedną z dwóch postaci
R
U
P
2
=
lub
R
I
P
2
⋅
=
.
Moc oddawana przez elementy źródłowe określana jest z zależności
I
U
P
⋅
=
z
gdzie
z
U , jest napięciem źródłowym, natomiast I oznacza prąd płynący w gałęzi
z rozpatrywanym źródłem.
W obwodzie elektrycznym występuje bilans mocy, w myśl którego, suma algebraiczna
mocy oddanych (lub pobranych) przez źródła energii elektrycznej jest równa sumie mocy
pobranych przez rezystory stanowiące odbiorniki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Rys. 15. Schemat szeregowego obwodu prądu stałego
W układzie na rys. 15 równanie bilansu mocy ma postać:
2
3
2
2
2
1
2
1
I
R
I
R
I
R
I
U
I
U
⋅
+
⋅
+
⋅
=
⋅
−
⋅
Obwody prądu sinusoidalnego
Wytwarzanie, przesyłanie i rozdzielanie energii elektrycznej dokonywane jest przy
użyciu urządzeń energii prądu zmiennego, ponieważ w tej postaci lepiej nadaje się do
przekazywania na duże odległości niż energia elektryczna przy napięciu i prądzie stałym.
Najbardziej rozpowszechnione są przebiegi sinusoidalne zmienne.
Wielkości charakterystyczne prądu sinusoidalnego (rys. 16)
Wartość chwilowa i =
ωt
sin
I
m
⋅
gdzie: I
m
– wartość maksymalna (amplituda ),
ω – pulsacja (prędkość kątowa),
t – czas.
Okres prądu sinusoidalnego T =
ω
2π
[T ]= s
Pulsacja ω = 2 π f [ ω ] = rad/s.
Częstotliwość f =
T
1
[ f ]= Hz (herc).
Wartość skuteczna prądu sinusoidalnego I =
2
I
m
= 0,707 I
m
Rys. 16. Wykres prądu sinusoidalnie zmiennego [4, s. 32]
Wartość średnia półokresowa prądu sinusoidalnego I
śr
=
π
2
I
m
= 0,637 I
m
Analogicznie określa się wartość skuteczną i średnią napięcia sinusoidalnego:
U =
2
U
m
= 0,707 U
m
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
U
śr
=
π
2
U
m
= 0,637 U
m
Wartość skuteczną oznacza się dużymi literami bez wskaźników. Wartości skuteczne
prądów i napięć można mierzyć za pomocą mierników elektrodynamicznych
i elektromagnetycznych.
Wartości średnie prądów i napięć można mierzyć miernikami magnetoelektrycznymi.
W praktyce posługujemy się wartościami skutecznymi napięć i prądów.
Prawa Kirchhoffa w obwodach prądu zmiennego
Podobnie jak w obwodach prądu stałego, w obwodach prądu przemiennego, do
sumowania napięć wystepujących na poszczególnych elementach lub sumowania prądow
w węzłach tych obwodów wykorzystuje się prawa Kirchhoffa, ale posługujemy się wtedy
wartościami chwilowymi prądu i napięcia.
Pierwsze prawo Kirchhoffa dla obwodu prądu przemienngo brzmi nastepująco: dla
każdego węzła obwodu elektrycznrgo, suma algebraiczna wartości chwilowych prądów jest
równa zeru.
Drugie prawo Kirchhoffa dotyczące bilansu napięć w oczku obwodu elektrycznego
można sformułować nastepująco: suma algebraiczna chwilowych napięć na elementach oczba
obwodu elektrycznego jest równa zeru.
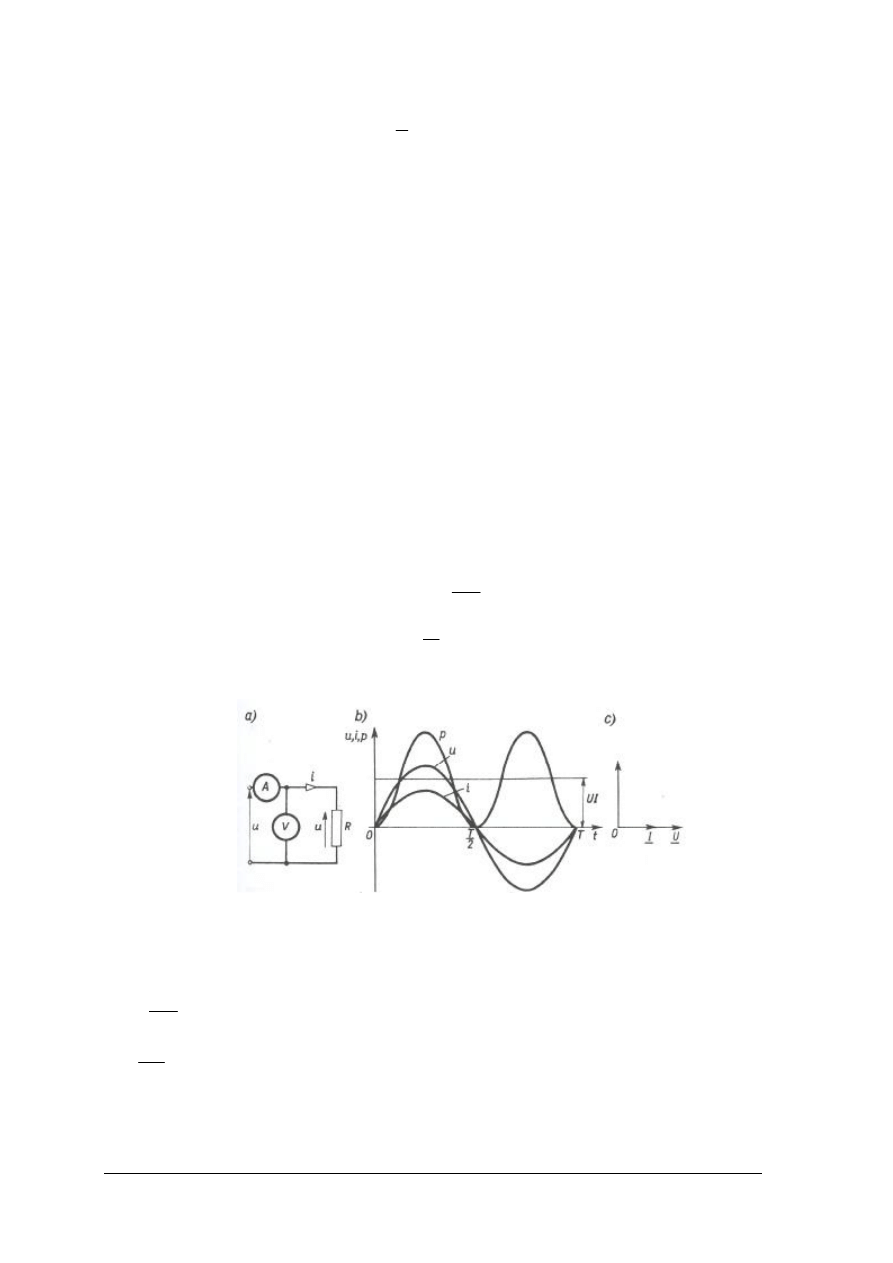
Obwód elektryczny z rezystancją, reaktancją i impedancją
Obwód elektryczny z rezystancją R (rys. 17):
I
m
=
R
U
m
U
G
R
U
I
⋅
=
=
Napięcie na rezystancji jest w fazie z prądem (kąt przesunięcia fazowego między prądem
i napięciem
ϕ = 0)
Rys. 17. Obwód elektryczny z rezystancją R: a) układ połączeń, b) przebiegi u, i, ; c) wykres wektorowy
wartości skutecznych prądu i napięcia [4, s. 33]
Obwód elektryczny z cewką o indukcyjności L (rys. 18)
I
m
=
L
m
X
U
I =
L
X
U
gdzie: X
L
- reaktancja indukcyjna cewki
L
f
2π
L
ω
X
L
⋅
=
⋅
=
[X
L
] =
Ω
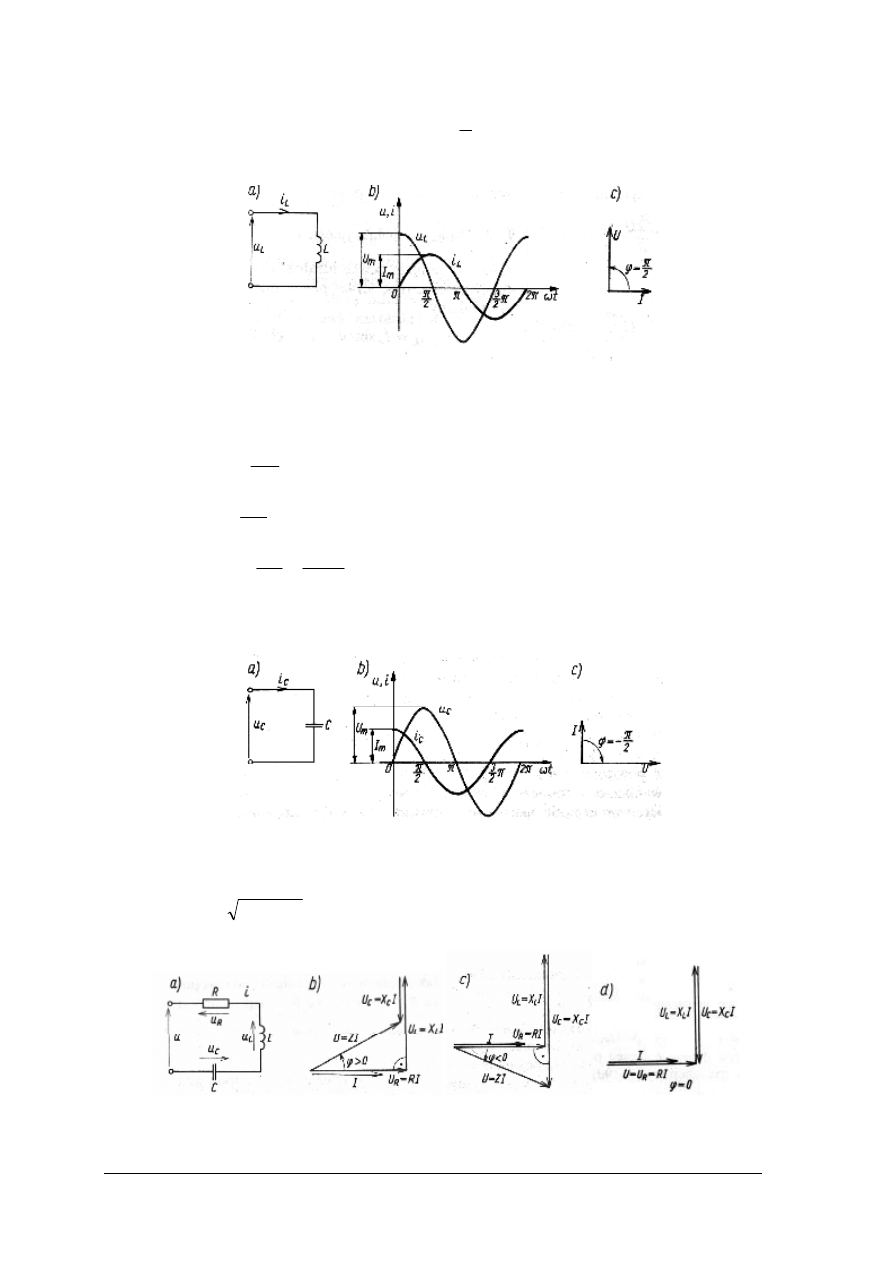
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Napięcie na cewce wyprzedza prąd o kąt 90° (
2
π
) lub prąd opóźnia się względem napięcia
o kąt 90 °.
Rys. 18. Obwód elektryczny z cewką o indukcyjności L: a) schemat dwójnika; b) wykres czasowy napięcia
i prądu; c) wykres wektorowy [2, s. 170]
Obwód elektryczny z kondensatorem o pojemności C (rys. 19)
I
m
=
C
m
X
U
I =
C
X
U
gdzie: X
C
- reaktancja pojemnościowa
X
C
=
ωC
1
=
fC
2π
1
[X
C
] =
Ω
Napięcie na kondensatorze opóźnia się względem prądu o kąt 90 ° lub prąd wyprzedza
napięcie na kondensatorze o kąt 90 ° .
Rys. 19. Obwód elektryczny z kondensatorem C: a) schemat dwójnika; b) wykres czasowy napięcia i prądu;
c) wykres wektorowy [2, s. 171]
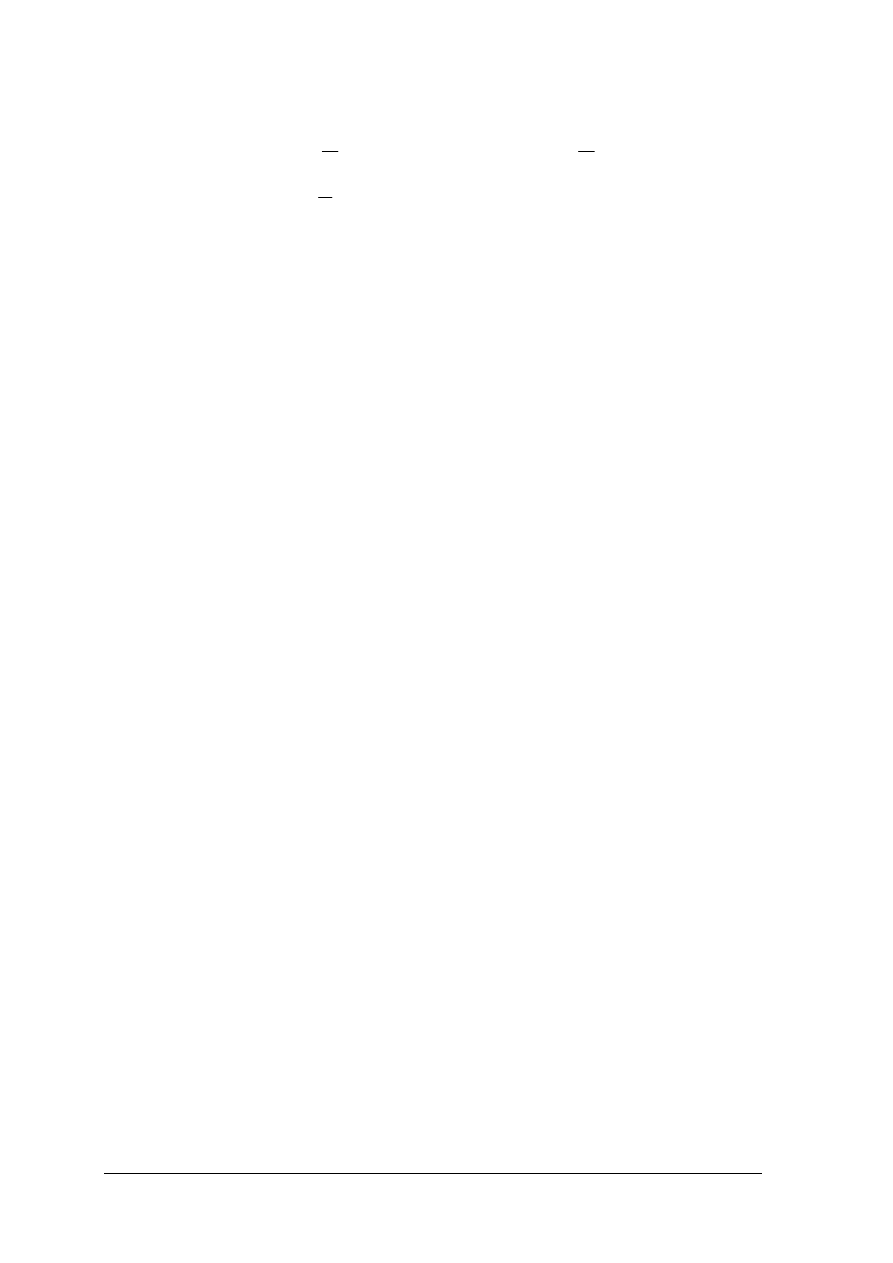
Obwód elektryczny z impedancją Z (rys. 20)
Impedancja Z =
2
2
X
R
+
Reaktancja X = X
L
- X
C
Rys. 20. Dwójnik szeregowy R, L, C: a) schemat dwójnika; b) wykres wektorowy dla X
L
> X
C
; c) wykres
wektorowy dla X
L
< X
C
; d) wykres wektorowy dla X
L
= X
C
[2, s.178]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Prawo Ohma dla prądu przemiennego
I =
Z
U
lub inne postacie
Z
I
U
⋅
=
; Z =
I
U
Z
1
= Y -admitancja [Y] = S (simens)
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak zaznaczamy kierunek prądu w obwodach prądu stałego?
2. Jak zaznaczamy kierunek prądu i napięcia na elementach źródłowych?
3. Jak zaznaczamy kierunek prądu i napięcia na elementach odbiorczych?
4. Jak brzmi prawo Ohma?
5. Jak brzmi I prawo Kirchhoffa w obwodach prądu stałego, a jak w obwodach prądu
zmiennego?
6. Jakie znaki przyjmują prądy odpływające od węzła, a jakie dopływające do niego?
7. Jak brzmi II prawo Kirchhoffa w obwodach prądu stałego, a jak w obwodach prądu
zmiennego?
8. W jaki sposób analizujemy oczko obwodu prądu stałego?
9. Od czego zależy wartość mocy wydzielonej na rezystorze?
10. O czym mówi bilans mocy w układzie prądu stałego?
11. Czym charakteryzuje się połączenie szeregowe rezystancji i źródeł napięcia?
12. Jak oblicza się wartość rezystancji zastępczej dowolnej liczby rezystorów połączonych
szeregowo?
13. Czym charakteryzuje się połączenie równoległe rezystancji?
14. Jak oblicza się wartość konduktancji zastępczej dowolnej liczby rezystorów połączonych
równolegle?
15. Co nazywamy wartością skuteczną prądu sinusoidalnego?
16. Jak wygląda przebieg czasowy i wykres wektorowy prądu i napięcia dla cewki
indukcyjnej?
17. Jak wygląda przebieg czasowy i wykres wektorowy prądu i napięcia dla kondensatora?
18. Jak zdefiniować prawo Ohma dla prądu przemiennego?
19. Jak wyjaśnić co to jest reaktancja cewki i kondensatora?
20. Co to jest impedancja i reaktancja obwodu RLC?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
4.4.3. Ćwiczenia
Ćwiczenie 1
Zastosowanie prawa Ohma do obliczania parametrów obwodu prądu stałego.
1. Przez rezystor o konduktancji G równej 5 10
⋅
-5
S płynie prąd I
1
równy 2 mA. Oblicz
spadek napięcia U
1
na tym rezystorze.
2. Na rezystorze o rezystancji R
2
równej 1 k
Ω
spadek napięcia U
2
= 3,5 V. Oblicz prąd
I
2
płynący przez ten rezystor.
3. Oblicz wartość rezystancji R
3
rezystora, na którym wystąpił spadek napięcia U
3
= 15 V
przy przepływie prądu I
3
o wartości 1,5 mA.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) obliczyć wartość spadku napięcia na rezystorze,
2) obliczyć wartość prądu płynącego przez rezystor,
3) obliczyć wartość rezystancji,
4) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.
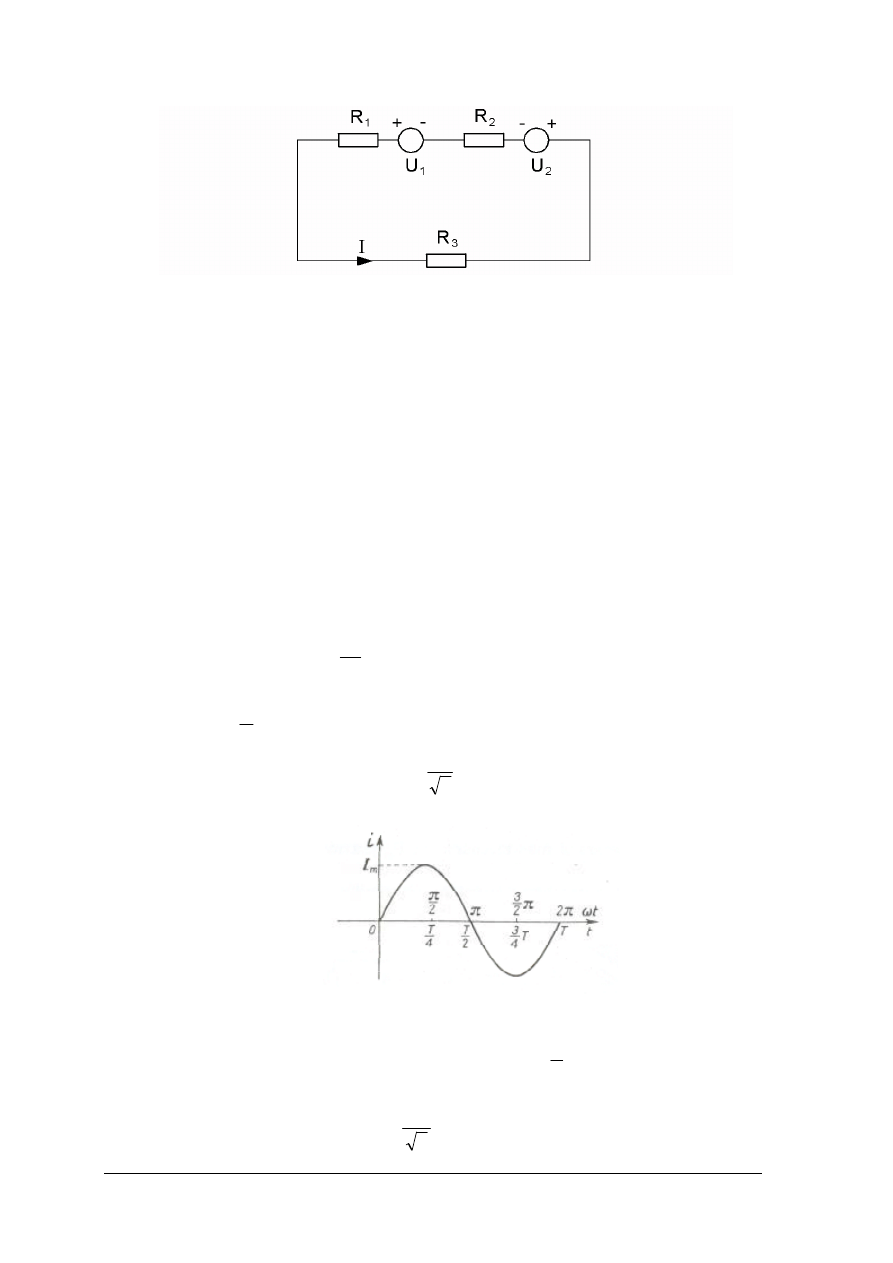
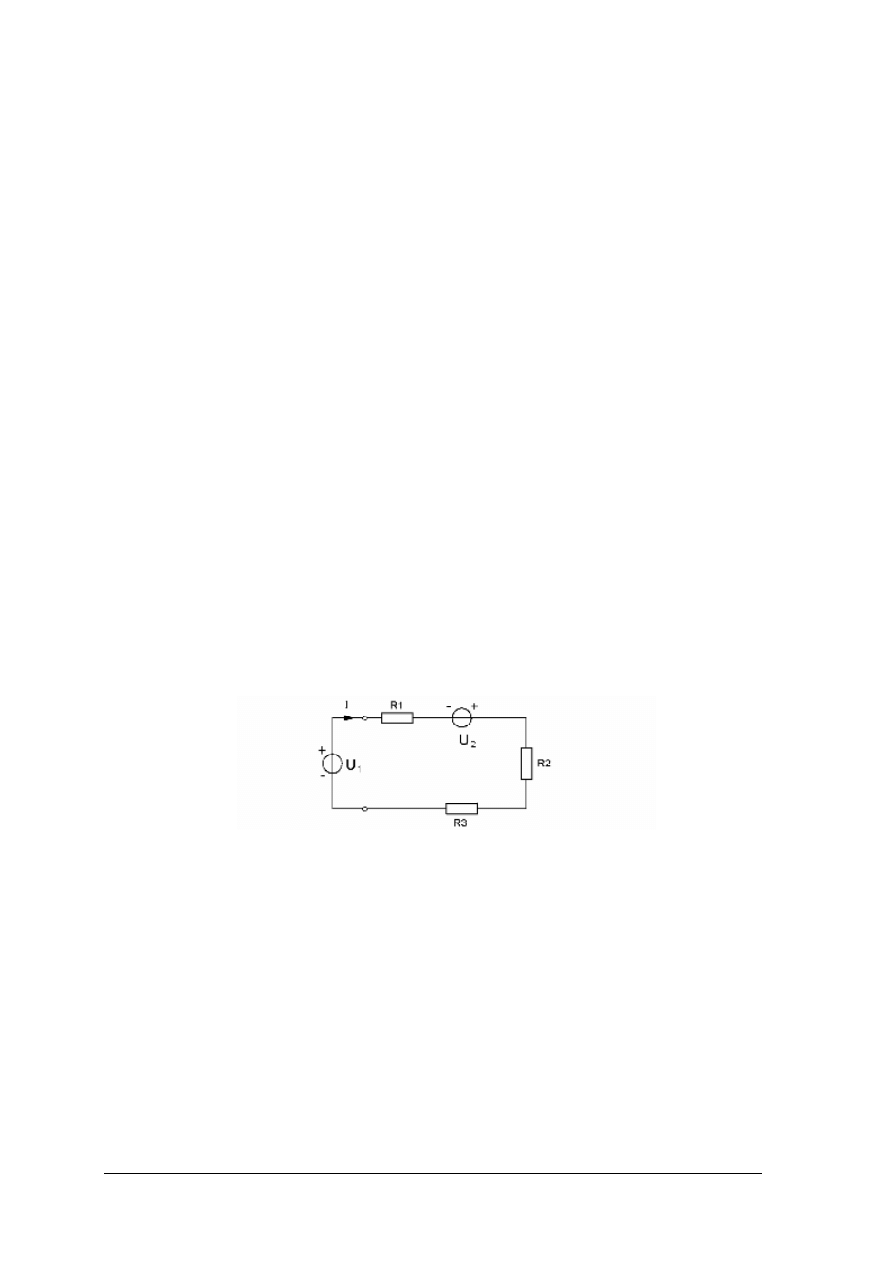
Ćwiczenie 2
Oblicz wartość spadku napięcia na rezystorze R
2
w obwodzie przedstawionym
na rysunku
.
Dane: U
1
= 15 V, U
2
= 13 V, R
1
= 10 k
Ω
, R
2
= 1,8 k
Ω
, R
3
= 2,2 k
Ω
.
Rysunek do ćwiczenia 2. Schemat obwodu nierozgałęzionego prądu stałego
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zaznaczyć kierunek prądu w obwodzie,
2) zaznaczyć kierunki spadków napięć na rezystorach,
3) zaznaczyć kierunek rozpatrywania oczka,
4) napisać równanie II prawa Kirchhoffa,
5) przekształcić równanie II prawa Kirchhoffa,
6) obliczyć wartość prądu,
7) obliczyć wartość spadku napięcia korzystając z prawa Ohma,
8) zaprezentować wyniki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.
Ćwiczenie 3
Wykonaj pomiary prądu i spadków napięcia na rezystorach w nierozgałęzionym
obwodzie prądu stałego, złożonym z jednego źródła napięcia i trzech rezystorów. Oblicz
spadki napięć na poszczególnych rezystorach zgodnie z prawem Ohma:
1
1
R
I
U
⋅
=
2
2
R
I
U
⋅
=
3
3
R
I
U
⋅
=
.
Dla badanego obwodu sprawdź prawdziwość II prawa Kirchhoffa.
Tabela obliczeń i wyników pomiarów.
Rezystor [
Ω
]
Spadek napięcia [V]
Prąd [mA]
Obliczona wartość spadku napięcia [V]
R
1
=
1
U
R
2
=
2
U
R
3
=
3
U
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zaprojektować nierozgałęziony obwód prądu stałego,
3) narysować schemat pomiarowy,
4) zgromadzić potrzebną aparaturę i elementy elektryczne,
5) zapisać oznaczenia wybranych przyrządów,
6) wybrać tryby pracy mierników,
7) połączyć układ pomiarowy,
8) wykonać pomiary napięć i prądu w układzie,
9) zapisać wyniki w tabeli wyników pomiarów i obliczeń,
10) obliczyć spadki napięć na poszczególnych rezystorach zgodnie z prawem Ohma:
1
1
R
I
U
⋅
=
2
2
R
I
U
⋅
=
3
3
R
I
U
⋅
=
11) zapisać dla badanego obwodu równanie II prawa Kirchhoffa,
12) sprawdzić prawdziwość II prawa Kirchhoffa dla badanego obwodu,
13) porównać obliczone wartości z wartościami uzyskanymi z pomiarów,
14) oszacować dokładność pomiarów i sformułować wnioski,
15) sporządzić sprawozdanie z ćwiczenia.
Wyposażenie stanowiska pracy:
–
zasilacz stabilizowany napięcia stałego +15 V,
–
rezystory: R = 1 k
Ω
/1 W; R = 1,8 k
Ω
/1 W; R = 2,2 k
Ω
/1 W; R = 820
Ω
/2 W;
R = 1,5 k
Ω
/1 W,
–
2 mierniki uniwersalne analogowe,
–
2 mierniki uniwersalne cyfrowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
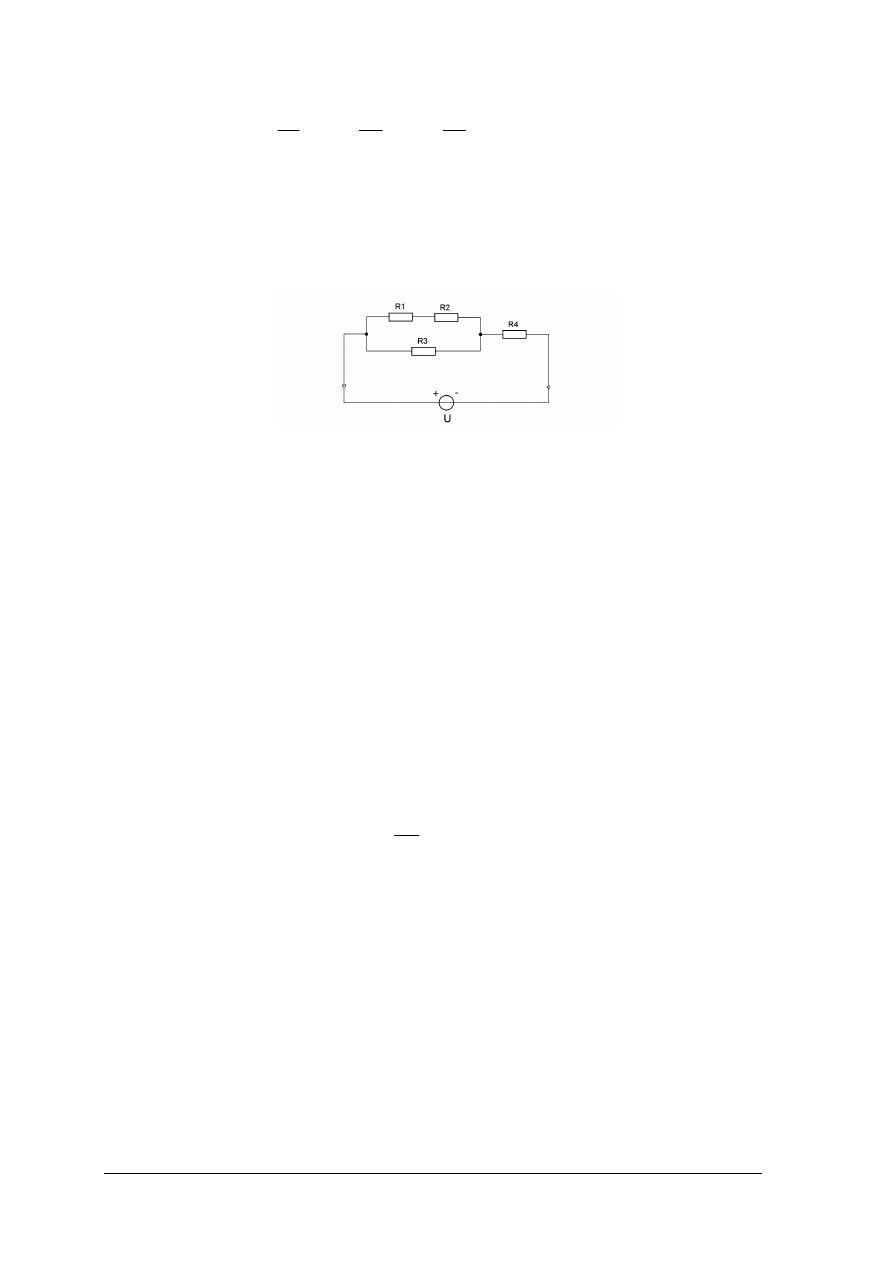
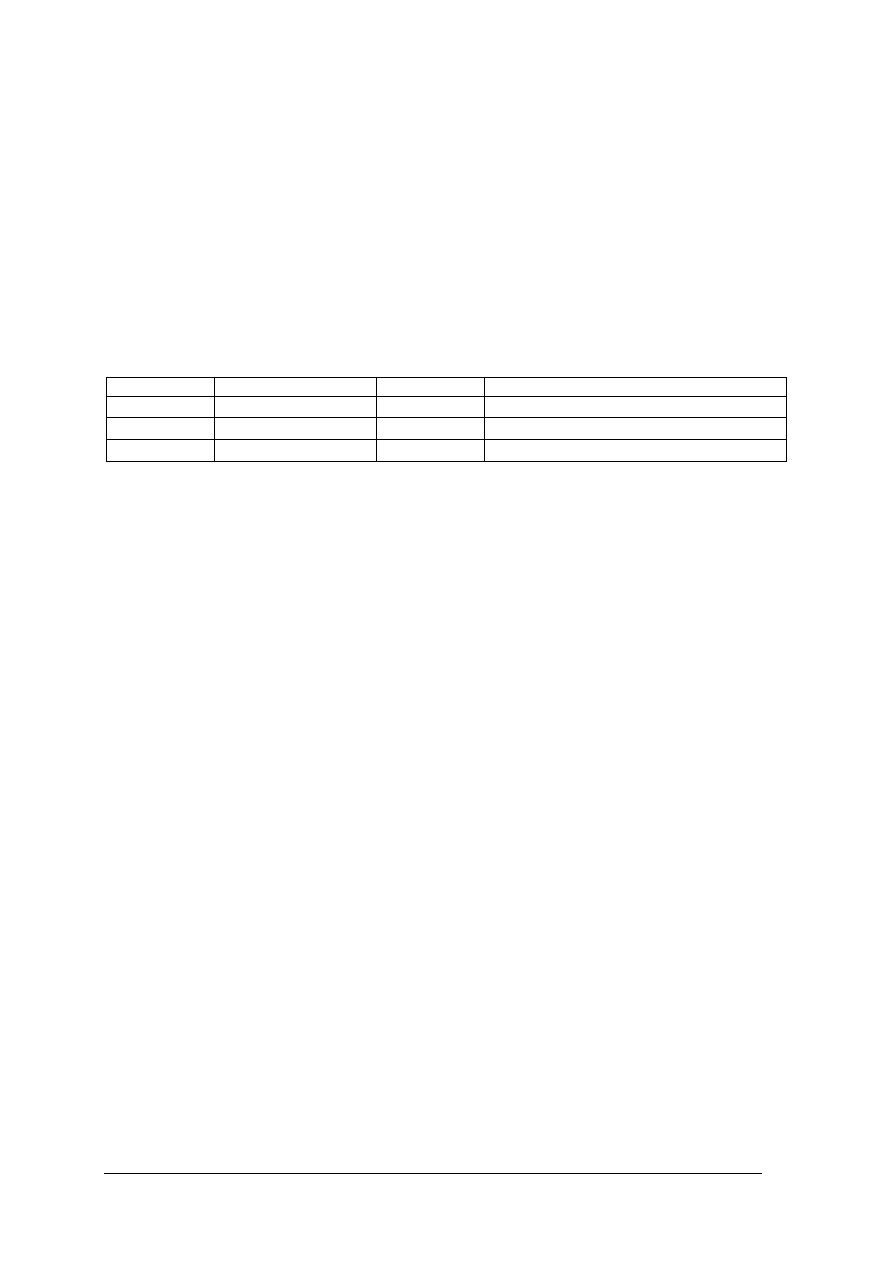
Ćwiczenie 4
Oblicz wartość rezystancji zastępczej obwodu z rysunku.
Dane:
R
1
= 3,2 k
Ω
,
R
2
= 2,8 k
Ω
,
R
3
= 1,5 k
Ω
,
R
4
= 2,2 k
Ω
.
Rysunek do ćwiczenia 4. Schemat obwodu z połączeniem mieszanym rezystorów
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zanalizować obwód wyodrębniając rezystory połączone szeregowo i równolegle,
3) zapisać wyrażenie na rezystancję zastępczą,
4) obliczyć wartość rezystancji zastępczej,
5) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
kalkulator,
−
literatura z rozdziału 6.
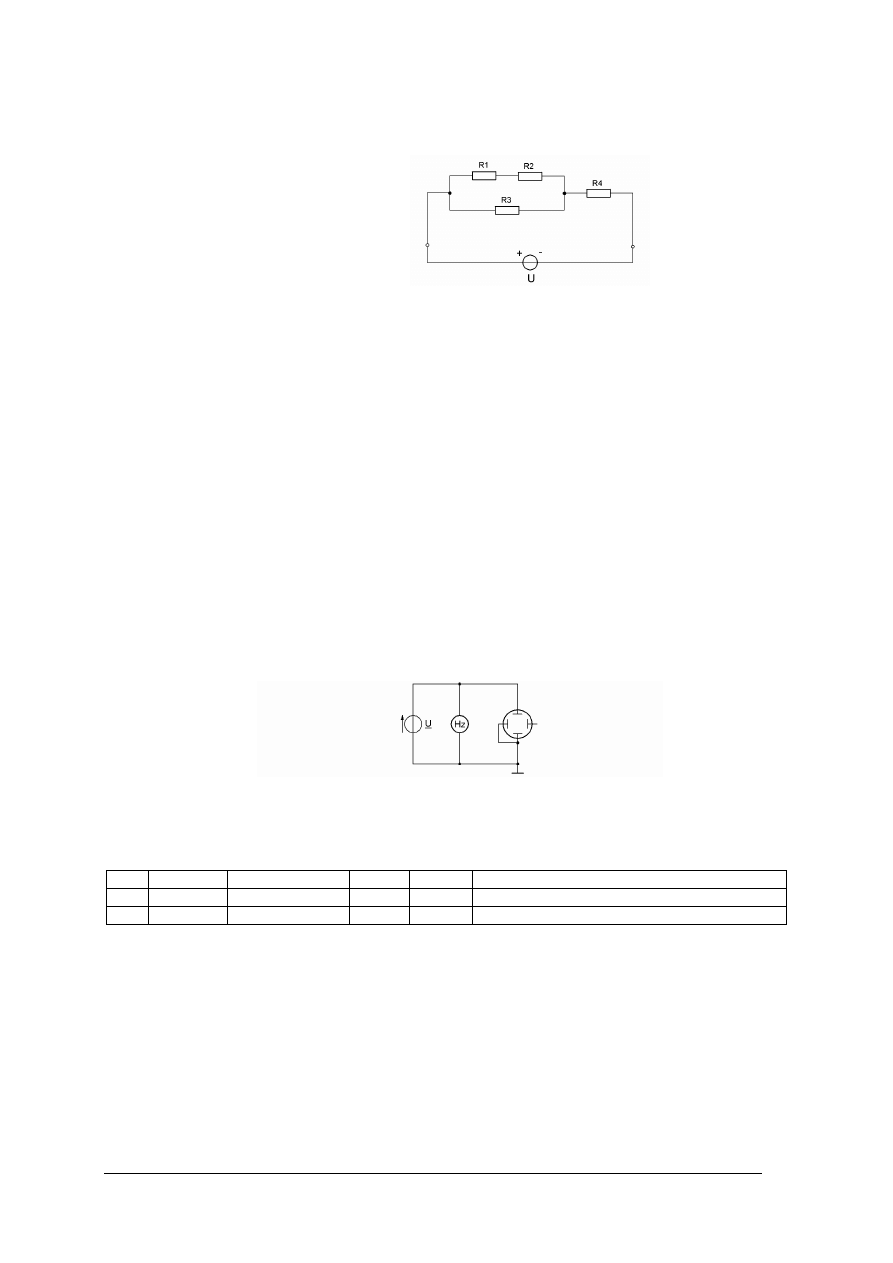
Ćwiczenie 5
Wykonaj pomiar częstotliwości oraz okresu napięcia sinusoidalnie zmiennego za pomocą
oscyloskopu i częstościomierza.
Rysunek do ćwiczenia 5. Schemat układu do pomiaru częstotliwości i okresu napięcia sinusoidalnie zmiennego
oscyloskopem i częstościomierzem.
Tabela wyników pomiarów i obliczeń
Lp.
L
x
[działki]
C
x
[ms/działki]
T
x
[ms]
f
x
[Hz]
Wskazanie częstościomierza [Hz]
L
x
- wartość okresu z oscylogramu; C
x
- współczynnik odchylania poziomego oscyloskopu
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zanalizować schemat pomiarowy,
2) skompletować potrzebną aparaturę,
3) połączyć obwód elektryczny i zasilić go napięciem sinusoidalnie zmiennym,
4) wykonać pomiary częstotliwości napięcia sinusoidalnie zmiennego częstościomierzem,
5) przerysować zaobserwowane oscylogramy, a wyniki pomiarów zapisać w tabeli,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
6) obliczyć wartości T
x
, f
x
na podstawie wzorów:
x
x
x
C
L
T
=
x
x
T
1
f
=
7) porównać obliczone wartości częstotliwości f
x
ze wskazaniami częstościomierza,
8) oszacować dokładność pomiarów i sformułować wnioski.
Wyposażenie stanowiska pracy:
−
generator funkcyjny,
−
częstościomierz,
−
oscyloskop.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) obliczyć wartość rezystancji na podstawie prawa Ohma?
¨
¨
2) przekształcić prawo Ohma w celu obliczenia spadku napięcia na
rezystorze?
¨
¨
3) przekształcić prawo Ohma w celu obliczenia prądu płynącego przez
rezystor?
¨
¨
4) zaznaczyć kierunek prądu w obwodzie?
¨
¨
5) zaznaczyć kierunki spadków napięcia na elementach w obwodzie
elektrycznym?
¨
¨
6) zapisać równanie I prawa Kirchhoffa dla węzła obwodu elektrycznego?
¨
¨
7) zapisać równanie II prawa Kirchhoffa dla oczka obwodu rozgałęzionego?
¨
¨
8) dokonać analizy obwodu nierozgałęzioniego prądu stałego?
¨
¨
9) obliczyć prąd w obwodzie nierozgałęzionym prądu stałego w oparciu
o II prawo Kirchhoffa i prawo Ohma?
¨
¨
10) obliczyć rezystancję zastępczą rezystorów połączonych szeregowo?
¨
¨
11) obliczyć rezystancję zastępczą rezystorów połączonych równolegle?
¨
¨
12) obliczyć rezystancję zastępczą połączenia mieszanego rezystorów?
¨
¨
13) połączyć układ elektryczny na podstawie schematu?
¨
¨
14) wykonać pomiary prądu i napięć w układzie?
¨
¨
15) odczytać parametry prądu sinusoidalnie zmiennego z wykresu przebiegu
czasowego tego prądu?
¨
¨
16) narysować wykres przebiegu czasowego na podstawie parametrów
przebiegu sinusoidalnego?
¨
¨
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
4.5. Pomiar podstawowych wielkości elektrycznych
4.5.1. Materiał nauczania
Podstawowe metody pomiarowe w obwodach prądu stałego
Metoda pomiarowa określa sposób wykonania pomiaru. Pomiary wielkości elektrycznych
można wykonywać metodami bezpośrednimi lub pośrednimi.
W metodach bezpośrednich wartość wielkości mierzonej odczytuje się bezpośrednio
z przyrządu pomiarowego. Przykładem pomiaru bezpośredniego jest pomiar napięcia
za pomocą woltomierza lub pomiar prądu za pomocą amperomierza.
W metodach pośrednich wykonuje się pomiary innych wielkości elektrycznych niż
poszukiwana. Następnie wyniki pomiarów podstawia się do zależności matematycznych
wynikających z praw obwodów elektrycznych i na podstawie obliczeń uzyskuje się wartość
wielkości poszukiwanej. Pośrednie metody pomiarowe to między innymi metody techniczne
pomiaru rezystancji i mocy prądu stałego oraz metody porównawcze napięć i prądów,
stosowane również do pomiaru rezystancji.
Podstawowe przyrządy pomiarowe stosowane w obwodach prądu stałego
Podstawowe wielkości elektryczne mierzone w układach elektrycznych prądu stałego
to napięcie elektryczne, prąd i rezystancja.
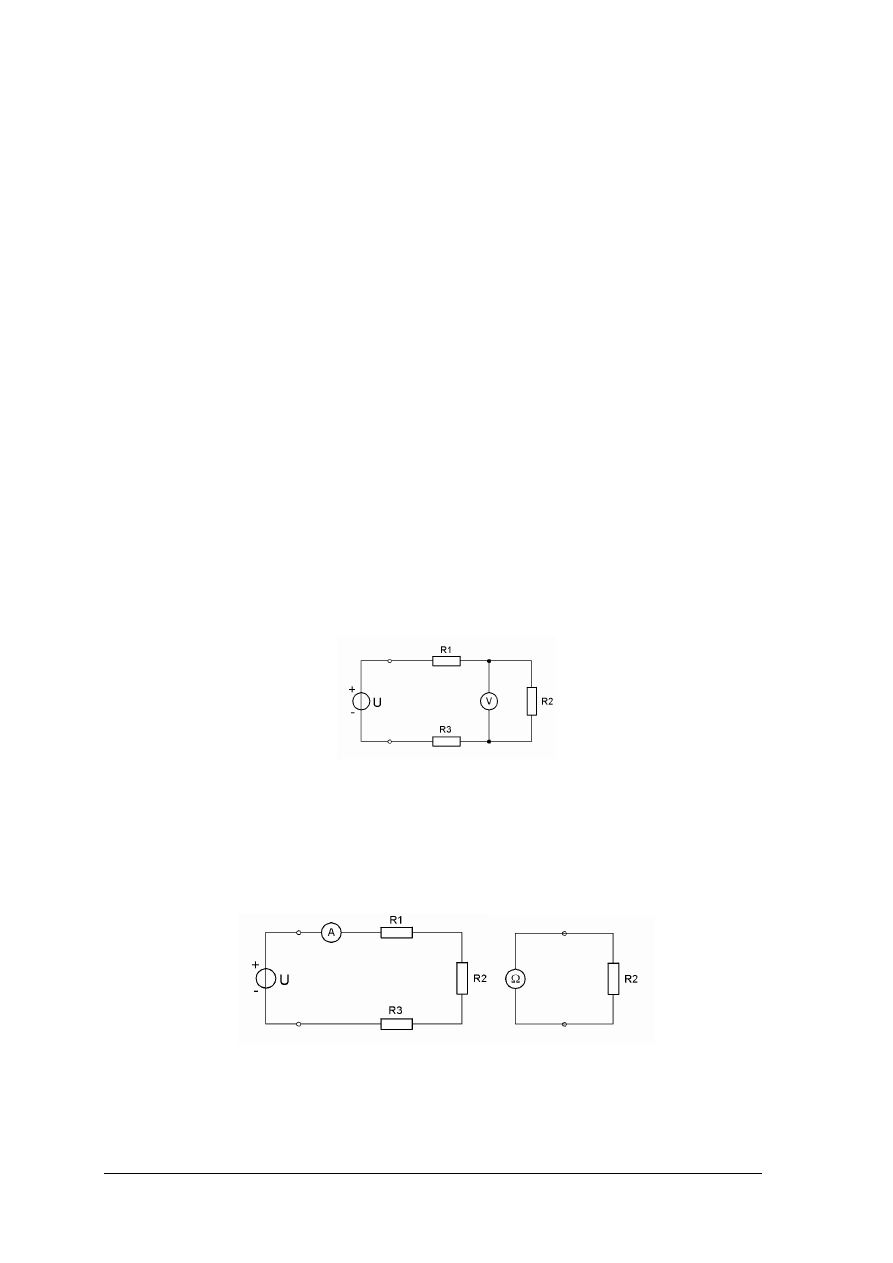
Pomiaru napięcia dokonuje się za pomocą woltomierza, który włączany jest równolegle
do tego fragmentu lub elementu obwodu, na którym chcemy zmierzyć napięcie (rys. 21).
Woltomierz posiada bardzo dużą rezystancję wewnętrzną (jej wartość zależny od zakresu
pomiarowego). Rezystancja wewnętrzna idealnego woltomierza dąży do nieskończoności.
Rys. 21. Schemat układu do pomiaru napięcia na rezystorze R
2
Pomiaru prądu dokonuje się za pomocą amperomierza, który włączany jest szeregowo
do obwodu (lub jego jednej gałęzi), w którym chcemy zmierzyć prąd (rys. 22a).
Amperomierz posiada bardzo małą rezystancję wewnętrzną (jej wartość zależy od
zakresu pomiarowego). Rezystancja wewnętrzna idealnego amperomierza wynosi 0
Ω
.
a) b)
Rys. 22. Schemat układu do pomiaru: a) prądu w obwodzie nierozgałęzionym, b) rezystancji omomierzem

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
Pomiaru rezystancji elementów elektrycznych wykonuje się omomierzem w sposób
przedstawiony na rys. 22b. Należy pamiętać, że element, którego rezystancję mierzymy
tą metodą nie może być włączony w obwód elektryczny, ani zasilony.
Obecnie powszechnie używane są mierniki uniwersalne – mogą one pracować
jako amperomierze, woltomierze czy omomierze (rys. 23). Posiadają one kilka gniazd
odpowiednio opisanych oraz pokrętło lub panel przycisków, które umożliwiają wybór trybu
pracy przyrządu czyli rodzaj mierzonej wielkości elektrycznej i zakres pomiarowy
(maksymalną wartość wielkości mierzonej). Niektóre nowoczesne mierniki uniwersalne mają
również dodatkowe funkcje umożliwiające pomiar pojemności i parametrów tranzystora
bipolarnego.
Rys. 23. Miernik uniwersalny [14]
Pomiary rezystancji metodą techniczną
a)
b)
Rys. 24. Schematy do pomiaru rezystancji metodą techniczną: a) układ poprawnie mierzonego napięcia, b) układ
poprawnie mierzonego prądu.
Do pomiaru małych rezystancji stosuje się układ poprawnie mierzonego napięcia
(rys. 24a). Dokonywany jest wówczas bezpośredni pomiar spadku napięcia U na badanej
rezystancji oraz pomiar sumy prądów: I płynącego przez badaną rezystancję oraz I
v
płynącego
przez woltomierz. Wartość rezystancji oblicza się z zależności uwzględniającej rezystancję
wewnętrzną woltomierza R
v
.
V
I
I
U
R
−
=
gdzie
V
V
R
U
I
=
określa prąd płynący przez woltomierz zatem
V
R
U
I
U
R
−
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Do pomiaru dużych rezystancji stosuje się układ poprawnie mierzonego prądu (rys. 24b).
Wykonywany jest wówczas bezpośredni pomiar prądu płynącego I przez badaną rezystancję
oraz pomiar spadku napięcia U na szeregowym połączeniu badanej rezystancji i rezystancji
wewnętrznej amperomierza. Wartość rezystancji oblicza się z zależności uwzględniającej
rezystancję wewnętrzną amperomierza
A
R
A
R
I
U
R
−
=
.
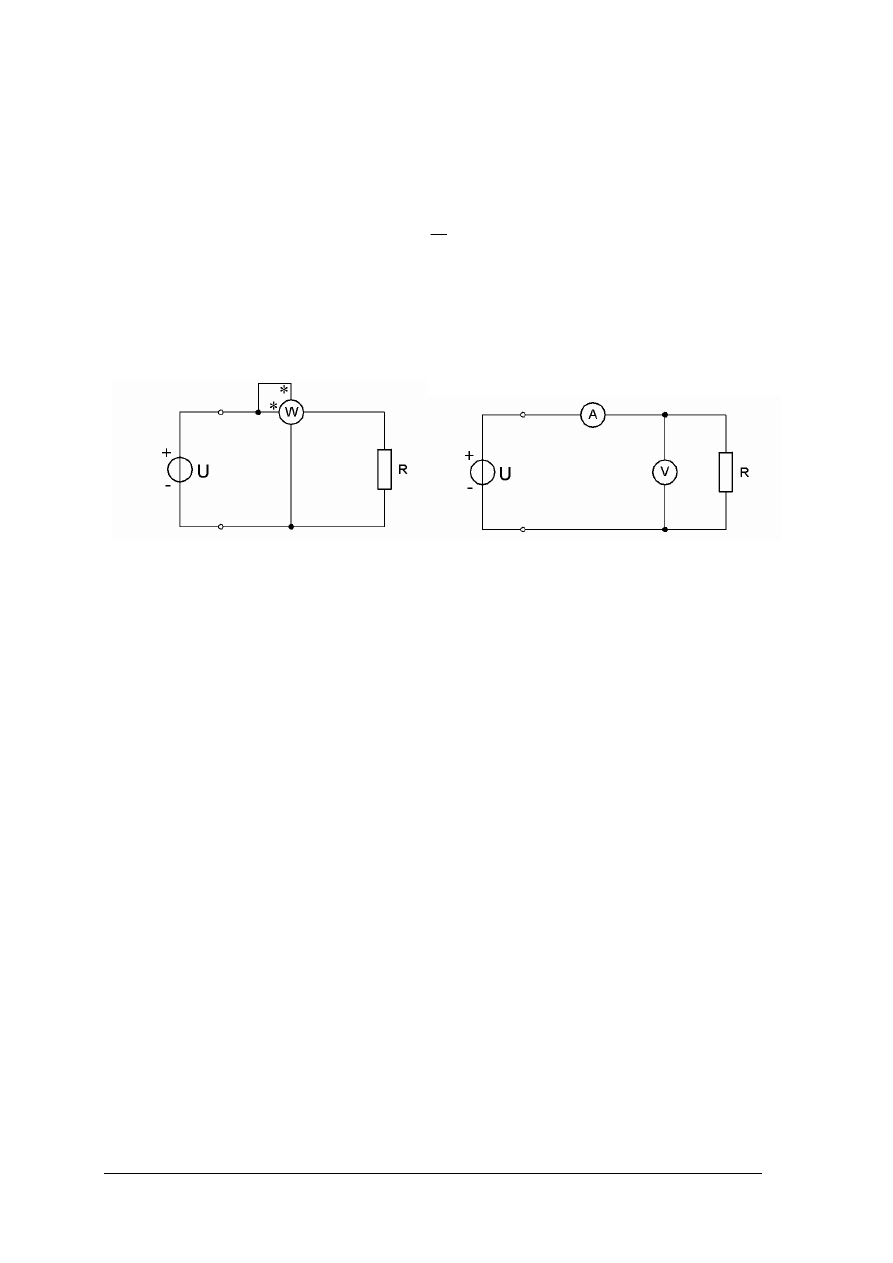
Metoda techniczna jest również stosowana do pomiaru mocy prądu stałego.
Pomiaru mocy w układach prądu stałego można dokonać metodą bezpośrednią za
pomocą watomierza (rys. 25a) lub w sposób pośredni metodą techniczną poprzez pomiar
spadku napięcia i prądu (rys. 25b).
a)
b)
Rys. 25. Układy do pomiaru mocy metodą: a) bezpośrednią, b) metodą techniczną
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaki miernik służy do pomiaru napięcia, prądu, rezystancji?
2. Jaki miernik służy do pomiaru prądu?
3. Jakie znasz metody pomiarowe stosowane w obwodach prądu stałego?
4. Na czym polega pomiar rezystancji metodą techniczną?
5. Jakie układy wykorzystuje się w metodzie technicznej pomiaru rezystancji?
4.5.3. Ćwiczenia
Ćwiczenie 1
Wykonaj pomiary rezystancji za pomocą miernika uniwersalnego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) narysować schemat pomiarowy,
3) zgromadzić potrzebną aparaturę i elementy elektryczne,
4) zapisać oznaczenia wybranych przyrządów,
5) wybrać tryb pracy miernika,
6) wykonać pomiary rezystancji wybranych elementów,
7) zapisać wyniki pomiarów,
8) porównać zmierzone wartości z wartościami podanymi przez producenta rezystorów,
9) oszacować dokładność pomiarów i sformułować wnioski,
10) sporządzić sprawozdanie z ćwiczenia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Wyposażenie stanowiska pracy:
–
rezystory: R = 1 k
Ω
/1 W; R = 1,8 k
Ω
/1 W; R = 2,2 k
Ω
/1 W; R = 820
Ω
/2 W;
R = 1,5 k
Ω
/1 W,
–
miernik uniwersalny cyfrowy.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wykonać pomiar prądu w obwodzie prądu stałego, za pomocą
amperomierza?
¨
¨
2) wykonać pomiar napięcia w obwodzie prądu stałego za pomocą
woltomierza?
¨
¨
3) wykonać pomiar rezystancji za pomocą omomierza?
¨
¨
4) wybrać odpowiedni tryb pracy miernika uniwersalnego?
¨
¨
5) podać przykład pomiaru elektrycznego wykonanego metodą bezpośrednią?
¨
¨
6) scharakteryzować pośrednią metodę pomiarową?
¨
¨
7) dokonać pomiaru natężenia?
¨
¨
8) dokonać pomiaru napięcia?
¨
¨
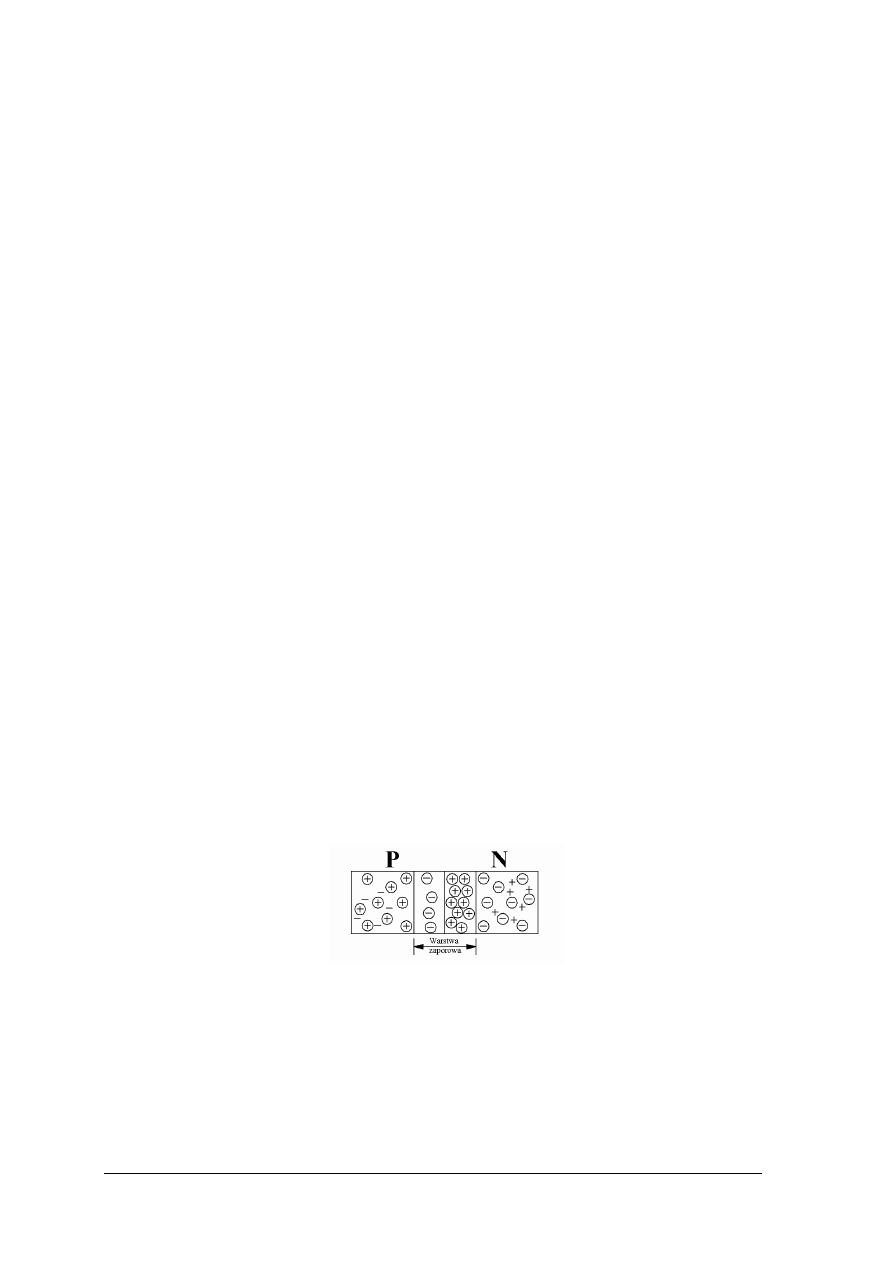
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
4.6. Podstawowe pojęcia elektroniki
4.6.1. Materiał nauczania
Prąd elektryczny w półprzewodnikach
Rozróżniamy półprzewodniki samoistne oraz domieszkowane. Powszechnie stosowane
w elektronice są półprzewodniki domieszkowane.
Ze względu na rodzaj domieszki rozróżniamy półprzewodniki typy N i typu P. Jeżeli
do pierwiastka IV grupy zostanie wprowadzony pierwiastek grupy V (tzw. domieszka
donorowa) powstanie półprzewodnik typu N, gdzie nośnikami większościowymi ładunku
elektrycznego są elektrony. Natomiast wprowadzając do pierwiastka IV grupy pierwiastek
grupy III (tzw. domieszkę akceptorową), otrzymamy półprzewodnik typu P, gdzie nośnikami
większościowymi ładunku elektrycznego są jak gdyby puste miejsca (powstałe na skutek
domieszkowania), zwane dziurami, które mają ładunek elektryczny dodatni.
Półprzewodniki znalazły zastosowanie w elementach i scalonych układach
elektronicznych, takich jak diody, tranzystory, wzmacniacze operacyjne i w wielu innych.
Prąd elektryczny w półprzewodnikach jest uporządkowanym ruchem elektronów lub
dziur pod wpływem oddziaływania zewnętrznego pola elektrycznego. Przepływ prądu
w półprzewodnikach zależy od jego polaryzacji.
Złącze półprzewodnik–półprzewodnik
Większość elementów półprzewodnikowych zawiera różnego rodzaju złącza, czyli
atomowo ścisłe związki kryształów ciała stałego. Najczęściej są to z łącza półprzewodnik–
półprzewodnik (PN), lub metal–półprzewodnik.
Złącze półprzewodnik–półprzewodnik (PN) stanowi warstwę przejściową pomiędzy
obszarem półprzewodnika typu P a obszarem półprzewodnika typu N (rys. 26). Dziury
w obszarze P i elektrony w obszarze N stanowią nośniki większościowe. Zetknięcie
obu obszarów spowoduje przemieszczenie tych nośników (ponieważ w pobliżu powierzchni
zetknięcia istnieje różnica koncentracji nośników) zwane dyfuzją. Dziury dyfundują do
obszaru N natomiast elektrony dyfundują do obszaru P, stanowiąc tam nadmiarowe ładunki
mniejszościowe.
W
obszarach
przyzłączowych
powstaje
warstwa
ładunków
mniejszościowych, które wdyfundowały z przeciwnego półprzewodnika. Warstwa ta
nazywana jest obszarem ładunku przestrzennego lub warstwą zaporową. Nie zawiera ona
praktyczne ładunków większościowych, a jej wielkość zależy od koncentracji domieszek
połączonych obszarów.
Rys. 26. Złącze PN [1, s. 44]
Polaryzacja złącza PN
Polaryzacja złącza PN, czyli doprowadzenia do niego z zewnątrz napięcia elektrycznego
powoduje zakłócenia jego równowagi elektrycznej. Rozróżniamy dwa sposoby polaryzacji
złącza PN (rys. 27):
−
polaryzację w kierunku zaporowym, zwaną też wsteczną, kiedy przez złącze nie płynie
prąd,
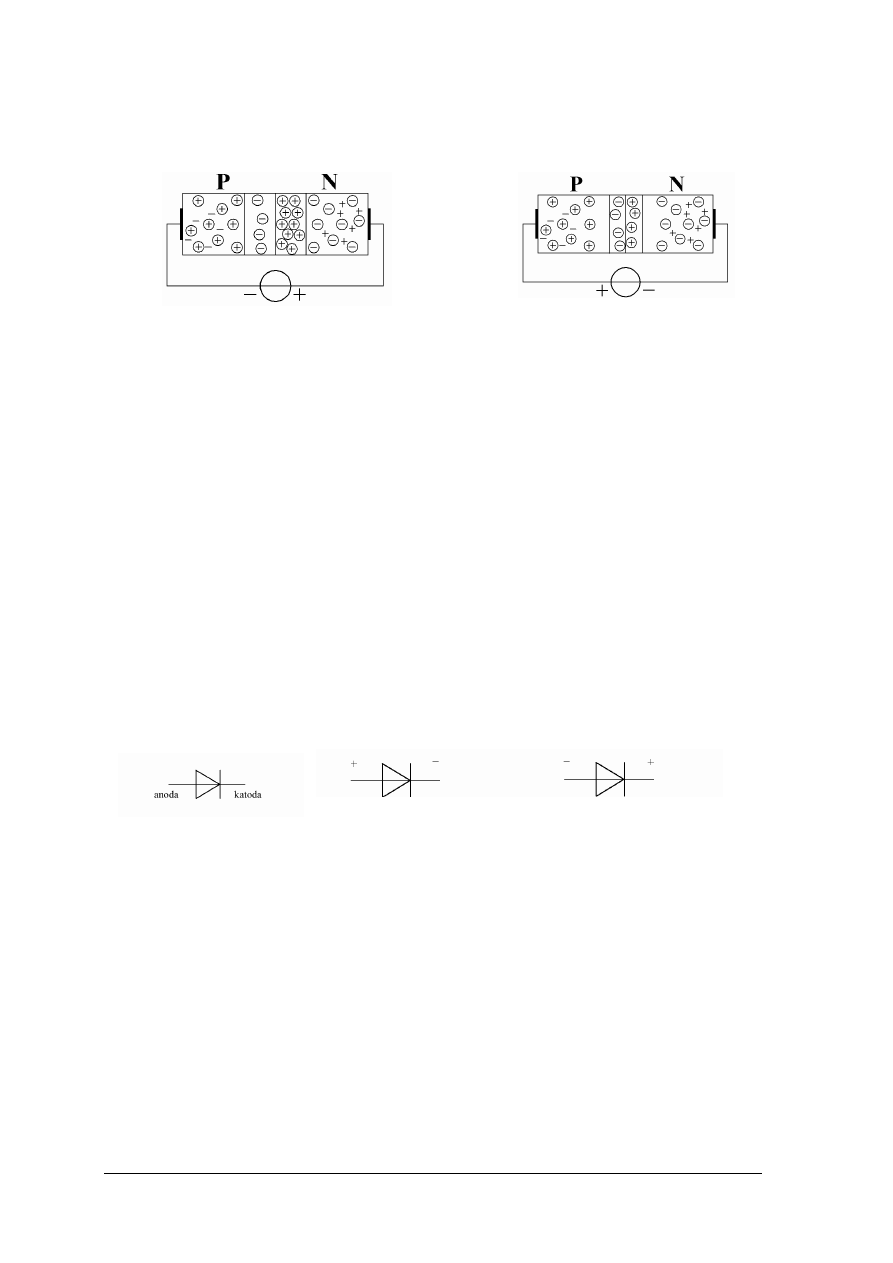
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
−
polaryzację w kierunku przewodzenia, kiedy w złączu występuje zjawisko przepływu
prądu.
a)
b)
Rys. 27. Polaryzacja złącza PN a) w kierunku zaporowym [2, s. 49], b) w kierunku przewodzenia [1, s. 47]
Przy polaryzacji wstecznej złącza PN biegun dodatni źródła dołączony jest do obszaru
typu N, natomiast biegun ujemny do obszaru typu P. Następuje dalszy odpływ swobodnych
nośników z obszarów otaczających warstwę zaporową, w efekcie czego zwiększa się jej
szerokość. Uniemożliwia to przepływ prądu przez złącze.
Przy polaryzacji złącza PN w kierunku przewodzenia, biegun dodatni źródła dołączony
jest do obszaru typu P, natomiast biegun ujemny do obszaru typu N. Następuje wówczas
dyfuzja większościowych nośników z półprzewodnika jednego typu do półprzewodnika
drugiego typu, w efekcie czego zmniejsza się szerokość warstwy zaporowej, a przez złącze
przepływa prąd. Budowa wielu aktywnych elementów elektronicznych oparta jest na jednym
lub kilku złączach PN.
Diody półprzewodnikowe
Podstawę diod półprzewodnikowych stanowi złącze PN. Diod półprzewodnika posiada
dwie elektrody anodę i katodę. Pod względu zasadę działania i przeznaczenia rozróżnia się
wiele rodzajów diod: prostownicze, stabilizacyjne, impulsowe, pojemnościowe, uniwersalne,
fotodiody, diody LED i inne.
Dioda prostownicza
a)
b)
c)
Rys. 28. a) Symbol diody prostowniczej; polaryzacja diody prostowniczej w kierunku: b) przewodzenia,
c) zaporowym [9, s.54]
W układach elektronicznych dioda prostownicza (rys. 28) wykorzystywana jest
przede wszystkim do przekształcania prądu zmiennego w jednokierunkowy prąd pulsujący.
Przewodzi ona prąd w jednym kierunku. Jeżeli do anody podłączony jest potencjał dodatni,
a do katody potencjał ujemny to jest to polaryzacja w kierunku przewodzenia. Jeśli na diodzie
pojawi się spadek napięcia zwany napięciem progowym, (którego wartość zależy od
materiału z jakiego została wykonana dioda i tak dla diod krzemowych jest to wartość około
0,7 V, dla germanowych około 0,3 V) to przez diodę popłynie prąd (od anody do katody).
Spadek napięcia na diodzie niewiele zmienia się pomimo dużych zmian wartości
przepływającego przez nią prądu, w katalogach podawane są typowe wartości tego spadku
napięcia. Przy polaryzacji odwrotnej zwanej polaryzacją w kierunku zaporowym (wówczas
do anody podłączony jest potencjał ujemny, a do katody dodatni), przez diodę płynie bardzo
mały prąd w kierunku zaporowym (od katody do anody), w wielu przypadkach analizy
działania układów elektronicznych możemy go pominąć. W kierunku zaporowym do diody
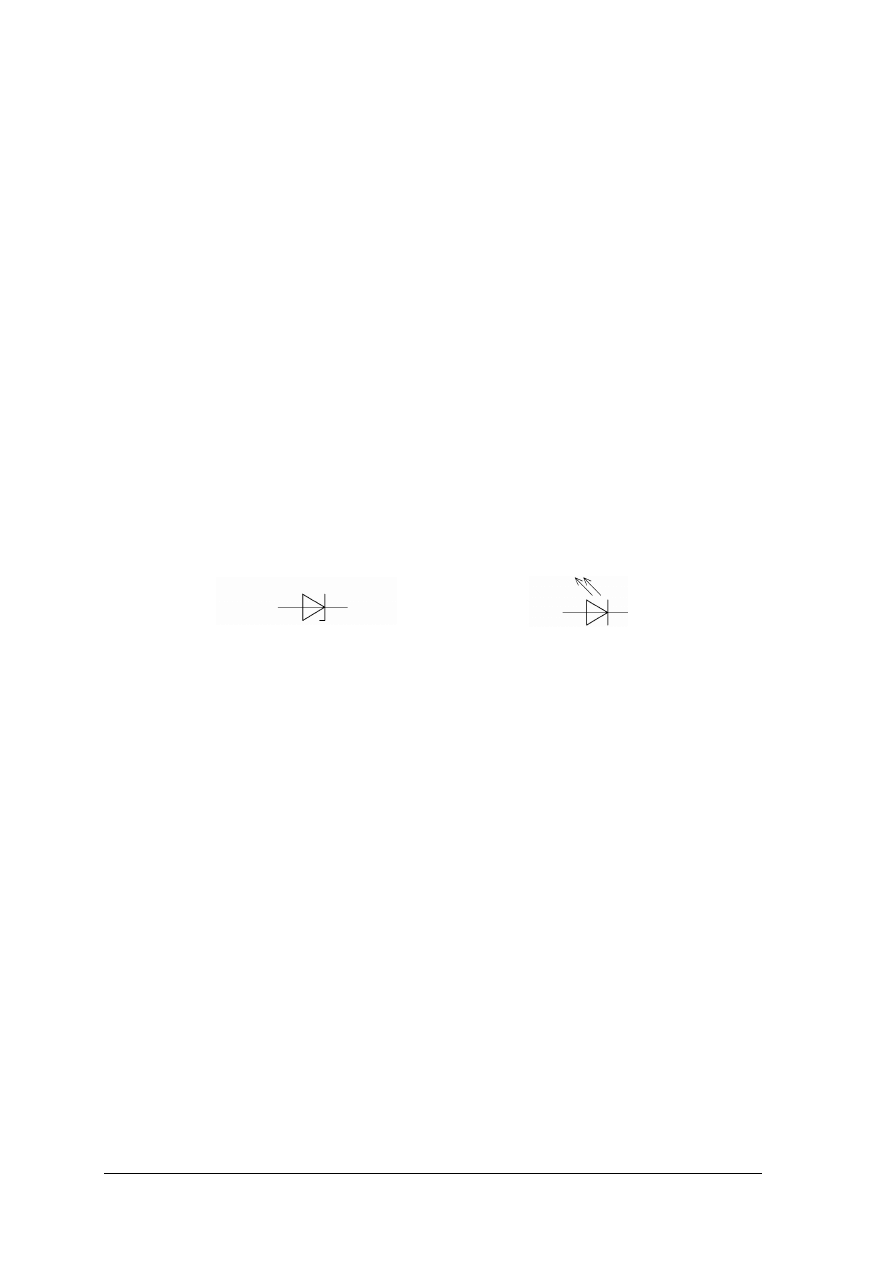
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
można przyłożyć tylko określona napięcia zwane maksymalnym napięciem wstecznym,
podane w danych katalogowych. Przekroczenie tej wartości spowoduje krótkotrwały
przepływ prądu przez diodę w kierunku zaporowym, powodujący zniszczenie jej struktury
wewnętrznej.
Podstawowe parametry diody podawane w katalogach elementów elektronicznych:
−
wartości graniczne napięcia w kierunku zaporowym V
RRM
i prądu przy tym napięciu I
R
,
−
wartości graniczne prądu w kierunku przewodzenia I
F
,
−
wartości typowe napięcia i prądu w kierunku przewodzenia V
F
, I
F
,
−
maksymalne straty mocy P
tot.
Diody prostownicze stosuje się najczęściej w układach prostowniczych urządzeń
zasilających.
Dioda stabilizacyjna (dioda Zenera)
Wykorzystuje się jej właściwości przy polaryzacji w kierunku zaporowym. Przy
polaryzacji w kierunku przewodzenia, dioda Zenera działa jak dioda prostownicza. Natomiast
przy polaryzacji w kierunku zaporowym, póki przyłożone napięcie nie osiągnie wartości
zwanej napięciem Zenera, przez diodę stabilizacyjną płynie bardzo mały prąd w kierunku
zaporowym (od katody do anody). Jeśli spadek napięcia w kierunku zaporowym osiągnie
wspomnianą wartość napięcia Zenera następuje zjawisko przebicia Zenera lub tunelowe,
polegające na szybkim wzroście wartości prądu przy prawie niezmienionej wartości spadku
napięcia. Diody stabilizacyjne stosuje się w układach stabilizacji napięć, w ogranicznikach
amplitudy, w układach źródeł napięć odniesienia itp.
a)
b)
Rys. 29. Symbole graficzne diody: a) stabilizacyjnej [2, s.59], b) LED [9, s. 450]
Podstawowe
parametry
diody
Zenera
podawane
w
katalogach
elementów
elektronicznych:
a) maksymalne straty mocy P
tot
,
b) wartości napięcia Zenera U
Z
przy prądzie I
Z
(zjawiska Zenera, lub zjawiska tunelowego),
c) rezystancja R
z
przy prądzie I
Z
,
d) wymiary geometryczne.
Diody stabilizacyjne stosuje się w układach stabilizacji napięć, w ogranicznikach
amplitudy, w układach źródeł napięć odniesienia itp.
Diody stabilizacyjne i prostownicze ze względu na maksymalne straty mocy dzielimy na:
−
małej mocy P
tot
<
1 W,
−
średniej mocy 1 W
≤
P
tot
≤
10 W,
−
dużej mocy P
tot
≥
10 W.
Wartość maksymalnych strat mocy P
tot
ma związek z dopuszczalną temperaturą złącza,
a to determinuje rodzaj obudowy stosowanej dla diody.
Dioda LED
Diody LED emitują światło pod wpływem przepływu przez nie prądu w kierunku
przewodzenia. Diodę LED zasila się napięciem w kierunku przewodzenia, łącząc szeregowo
z nią rezystor ograniczający prąd.
Diody LED wykorzystuje się zasadniczo jako samodzielne elementy sygnalizujące,
buduje się z nich również wyświetlacze.
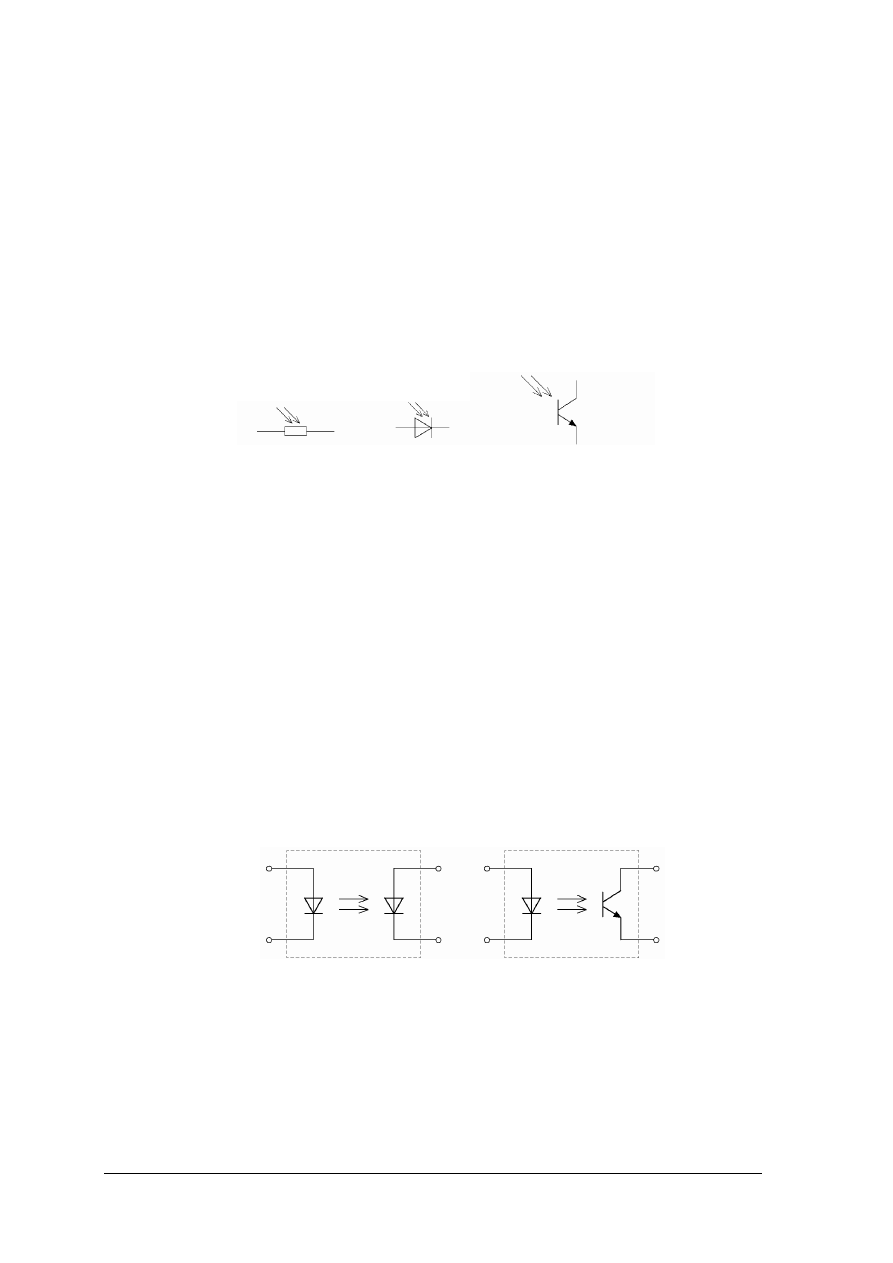
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Elementy optoelektroniczne
Działanie elementów optoelektronicznych związane jest ze światłem. Do tej grupy należą
diody LED emitujące światło oraz elementy, których właściwości elektryczne zmieniają się
pod wpływem oświetlenia, takie jak: fotoelementy: fotorezystory, fotodiody i fototranzystory.
Transoptory będące połączeniem nadajnika światła (diody LED) i fotoelementu również
zaliczamy do grupy elementów optoelektronicznych. Wspólnym parametrem fotoelementów
jest kąt detekcji, czyli kąt pod jakim padające promienie światła oddziałują na nie.
Fotorezystor zmienia swoją rezystancję w zależności od natężenia światła. Ze względu
na obciążalność dochodzącą nawet do kilku watów umożliwiają one nawet bez dodatkowego
wzmocnienia np. bezpośrednie sterowanie przekaźników.
a)
b)
c)
Rys. 30. Symbole elementów optoelektronicznych: a) fotorezystora [12], b) fotodiody [9, s.450],
c) fototranzystora [13]
Fotodioda jest w zasadzie zwykłą diodą spolaryzowaną w kierunku zaporowym,
w której przy oświetleniu wzrasta prąd przepływu. W porównaniu z fototranzystorem
ma znacznie krótszy czas reakcji.
Fototranzystor jest tranzystorem, które do działanie spowodowane jest oświetleniem
złącze kolektor – baza. Wówczas następuje przepływ prądu bazy, a tym samym wzmocnienie
prądu kolektora. Fototranzystory są wolniejsze niż fotodiody.
Transoptor składa się z nadajnika światła np. diody LED i detektora światła
np. fotodiody lub fototranzystora (rys. 31). Wysterowana prądem wejściowym dioda świecąca
transoptora emituje światło, które oddziałuje na fotoelement przetwarzając je na prąd
wyjściowy transoptora. Przy pomocy transoptora można przekazywać sygnały pomiędzy
obwodami odizolowanymi galwanicznie. Stosowane są zazwyczaj w zasilaczach
z przetwarzaniem częstotliwości, do przesyłania sygnałów analogowych, w pętlach
prądowych do przesyłania sygnałów cyfrowych.
Rys. 31. Układy transoptora [9, s.456]
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie półprzewodniki stosowane są w elementach elektronicznych?
2. Jaki czynnik decyduje o przepływie prądu elektrycznego w złączu półprzewodnikowym?
3. Jak zbudowana jest dioda prostownicza?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
4. Jaka jest zasada działania diody prostowniczej?
5. Do budowy jakich układów elektronicznych służy dioda prostownicza?
6. Jaka jest różnica w działaniu diody prostowniczej i Zenera?
7. W jakich układach elektronicznych stosowana jest dioda Zenera?
8. Jaka jest wspólna cecha elementów optoelektronicznych?
9. W jakim celu stosuje się transoptory?
4.6.3. Ćwiczenia
Ćwiczenie 1
Określ wyprowadzenia i parametry diody Zenera na podstawie katalogu elementów
elektronicznych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać oględzin diody Zenera,
2) wybrać odpowiedni katalog elementów elektronicznych,
3) wyszukać w katalogu kartę diody,
4) określić parametry elementu,
5) określić wyprowadzenia diody,
6) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−
dioda Zenera,
−
katalogi elementów elektronicznych.
Ćwiczenie 2
Wyszukaj, na otrzymanym schemacie elektrycznym, symbole: diody prostowniczej,
stabilizacyjnej oraz tranzystora bipolarnego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zapoznać się z otrzymanym schematem elektrycznym,
3) odszukać symbole: diody prostowniczej, stabilizacyjnej oraz tranzystora bipolarnego,
4) zaprezentować wyniki.
Wyposażenie stanowiska pracy:
−
schemat układu elektronicznego,
−
literatura wskazana przez nauczyciela.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) scharakteryzować półprzewodniki domieszkowane?
¨
¨
2) wyjaśnić zjawisko przepływu prądu w złączu półprzewodnikowym?
¨
¨
3) wyjaśnić zasadę działania podstawowych elementów elektronicznych?
¨
¨
4) rozróżnić symbole graficzne podstawowych elementów elektronicznych?
¨
¨
5) określić na podstawie katalogu elementów elektronicznych typ i parametry
danego elementu elektronicznego?
¨
¨
6) rozróżnić wyprowadzenia określonego elementu elektronicznego?
¨
¨
7) scharakteryzować zastosowanie podstawowych elementów elektronicznych?
¨
¨
8) wyjaśnić zasadę działania transoptora?
¨
¨
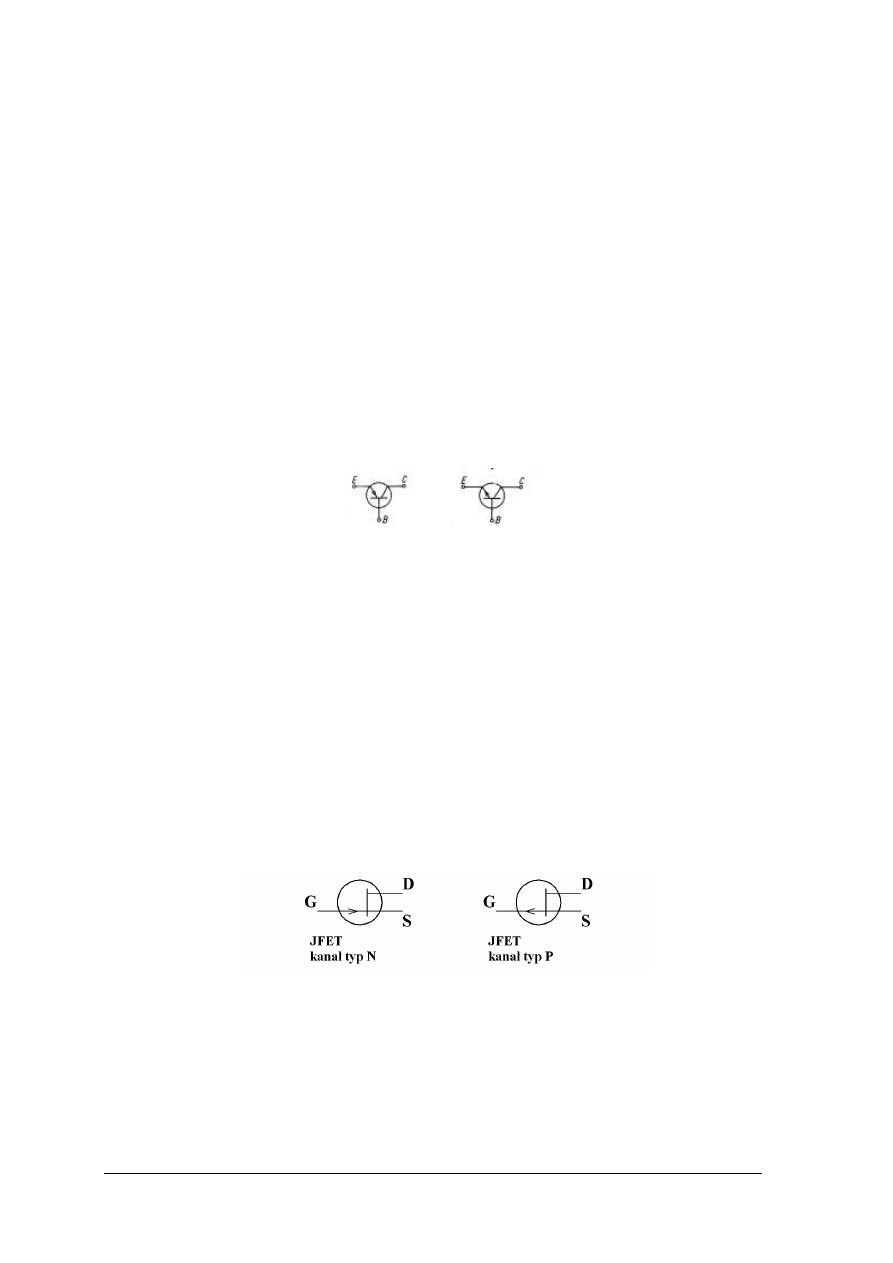
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
4.7. Podstawowe elementy elektroniczne
4.7.1. Materiał nauczania
Tranzystory
Obecnie produkowanych jest wiele typów tranzystorów przeznaczonych do różnych
zastosowań. Mogą one występować jako elementy dyskretne, najczęściej jednak stanowią
podstawowy element układów scalonych.
Tranzystor bipolarny
Tranzystor bipolarny przeznaczony jest do pracy jako wzmacniacz sterowany prądowo.
Zbudowany jest z trzech warstw półprzewodnika stanowiących kombinację dwóch złącz PN.
Ze wzglądu na budowę rozróżniamy tranzystory bipolarne typu PNP i NPN (rys. 32).
Tranzystor bipolarny można przedstawić jako dwie diody przewodzące prąd w kierunku
bazy (PNP), albo w kierunku od bazy (NPN).
a)
b)
Rys. 32. Symbol tranzystora a) PNP, b) NPN [9, s.62]
Struktura półprzewodnikowa tranzystora umieszczona jest w hermetycznie zamkniętej
obudowie chroniącej przed uszkodzeniami mechanicznymi, ale również spełniającej inne
funkcje np. w tranzystorach średniej i dużej mocy umożliwia odprowadzanie ciepła.
Tranzystor bipolarny posiada trzy elektrody E – emiter, B – bazę, C – kolektor. Baza jest
elektrodą sterująca. Zazwyczaj tranzystor pracuje jako wzmacniacz prądowy. Mały prąd
wpływający do bazy umożliwia przepływ większego prądu pomiędzy kolektorem a emiterem.
Jest to tak zwany stan aktywny pracy tranzystora.
Tranzystor bipolarny może również pracować w stanie nieprzewodzenia zwanego
też odcięciem. Wówczas prąd płynący między kolektorem a emiterem jest bardzo mały,
a napięcie pomiędzy kolektorem a emiterem jest maksymalne.
Stan nasycenia tranzystora bipolarnego charakteryzuje się przepływem dużego prądu
kolektora, przy minimalnym napięciu pomiędzy kolektorem a emiterem.
Tranzystor unipolarny (polowy)
a)
b)
Rys. 33. Symbol graficzny tranzystora unipolarnego JFET z kanałem typu: a) N, b) P [9, s. 82]
Tranzystor unipolarny (rys. 33) posiada trzy elektrody: bramkę (oznaczoną symbolem G),
dren (oznaczony symbolem D) i źródło (oznaczony symbolem S). Najczęściej spotykane
obecnie tranzystory polowe to: złączowe JFET i z izolowaną bramką MOSFET. Tranzystory
MOSFET to obecnie najlepsze przełączniki mocy ze względu na dobre czasy przełączania
i obciążalność mocową.
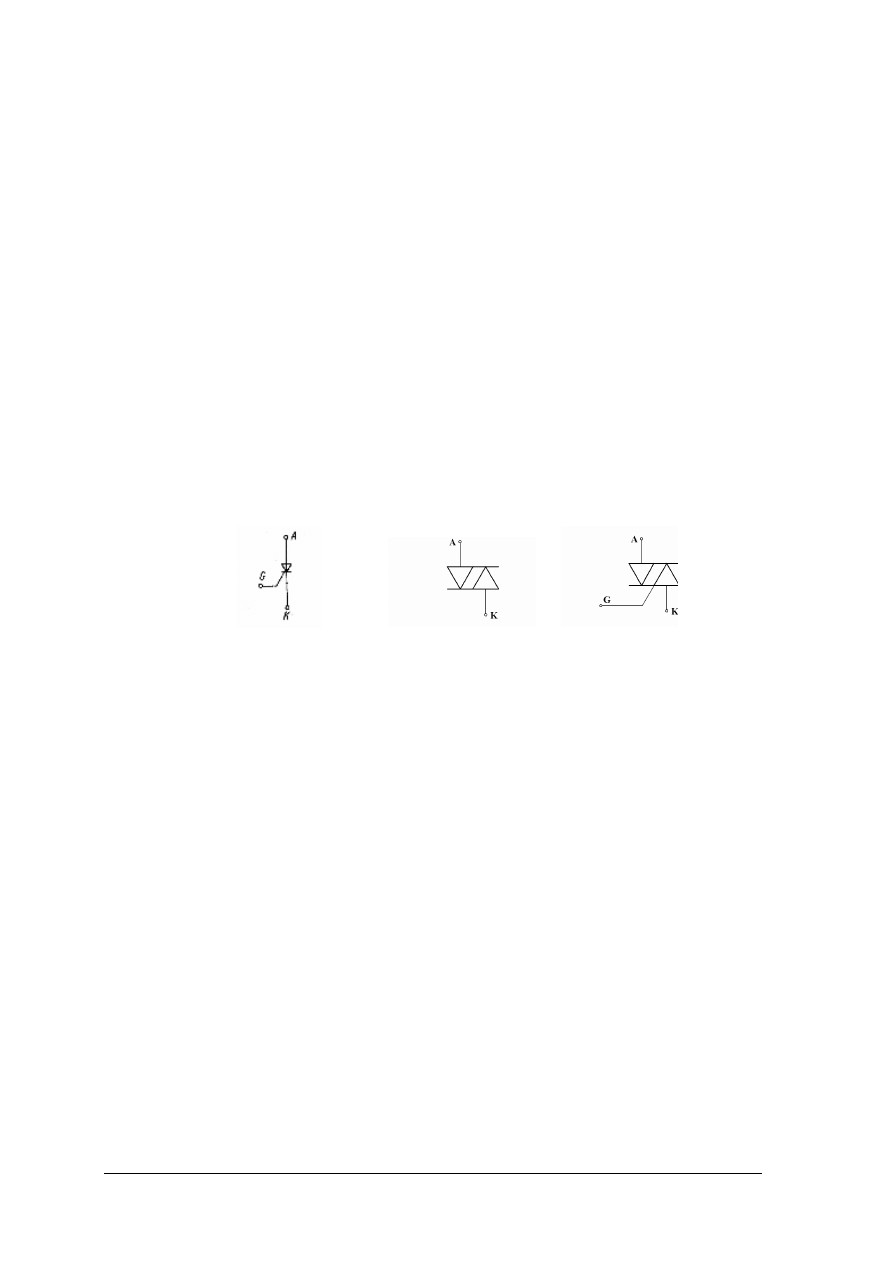
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Tranzystory polowe występują w dwóch rodzajach jako:
−
zubożone, które przewodzą prąd jeśli na bramce jest napięcie zerowe,
−
wzbogacone, które nie przewodzą prądu póki do bramki nie zostanie przyłożone
odpowiednie napięcie.
Tyrystor
Tyrystor posiada trzy elektrody: anodę – A, katodę – K i elektrodę sterującą, czyli
bramkę – G (rys. 34a).Zwany jest diodą sterowana, ponieważ może przewodzić prąd tylko
w jedną stronę, podobnie jak dioda, pod warunkiem wysterowania bramki. Tyrystor zacznie
przewodzić, czyli następuje jego zapłon, wówczas, gdy dołączymy do jego bramki napięcie
dodatnie względem katody i spowodujemy przepływ prądu sterującego (bramki) I
GT
i będzie
się znajdował w tym stanie, nawet po wyłączeniu prądu sterującego.
Wyłączenie tyrystora, czyli przejście do stanu blokowania (nieprzewodzenia), może
odbywać się poprzez:
−
zmniejszenie prądu anodowego, poniżej podanej w katalogu wartości prądu
podtrzymania I
H
,
−
przerwanie obwodu anodowego.
Tyrystory są powszechnie stosowane w układach energoelektronicznych, między innymi
w prostownikach sterowanych.
a)
b)
c)
Rys. 34. Symbole: a) tyrystora, b) diaka c) triaka [9, s. 79]
Triak
Triak zwany jest też tyrystorem symetrycznym (rys. 34c). Posiada trzy elektrody: anodę
oznaczoną symbolem A, katodą oznaczoną symbolem K i bramkę oznaczoną symbolem G.
Różni się od tyrystora tym, że może przewodzić prąd w obu kierunkach.
Triaki mogą zastępować w układach elektrycznych tyrystory upraszczając w ten sposób
strukturę układów sterujacych.
Diak
Diak zwany jest też diodą spustową, przewodzi prąd w dwóch kierunkach (rys. 34b).
Jest to triak bez wyprowadzonej bramki. Diaki stosowane są do sterowania triakami.
4.7.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz typy tranzystorów?
2. Jakie wyprowadzenia posiada tranzystor bipolarny?
3. Jak zbudowany jest tranzystor unipolarny?
4. Czym charakteryzuje się tranzystor MOSFET?
5. Jaka jest zasada działania tyrystora?
6. Jaka jest różnica pomiędzy triakiem a tyrystorem?
7. W jakich układach stosuje się diaki?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
4.7.3. Ćwiczenia
Ćwiczenie 1
Określ typ i parametry tranzystora na podstawie katalogu elementów elektronicznych.
Rozróżnij jego wyprowadzenia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać oględzin otrzymanego tranzystora,
2) wybrać odpowiedni katalog elementów elektronicznych,
3) wyszukać w katalogu kartę danego tranzystora,
4) określić typ i parametry elementu,
5) zidentyfikować wyprowadzenia elementu,
6) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−
tranzystor,
−
katalogi elementów elektronicznych.
Ćwiczenie 2
Rozróżnij otrzymane elementy elektroniczne. Scharakteryzuj ich zastosowanie.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać oględzin otrzymanych elementów elektronicznych,
2) określić ich rodzaj,
3) określić zastosowanie każdego elementu,
4) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−
tranzystor bipolarny, unipolarny, tyrystor, triak,
−
katalogi elementów elektronicznych.
4.7.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) scharakteryzować zasadę działania tranzystora bipolarnego?
¨
¨
2) określić zastosowanie tranzystora bipolarnego?
¨
¨
3) wyjaśnić budowę tranzystora unipolarnego?
¨
¨
4) rozróżnić symbole graficzne tranzystorów?
¨
¨
5) określić na podstawie katalogu elementów elektronicznych typ i parametry
danego elementu elektronicznego?
¨
¨
6) rozróżnić wyprowadzenia tranzystorów i elektronicznych elementów
przełączających?
¨
¨
7) scharakteryzować zasadę działania tyrystora, triaka i diaka?
¨
¨
8) określić zastosowanie tyrystora, triaka i diaka?
¨
¨
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
4.8. Elektronika w górnictwie podziemnym
4.8.1. Materiał nauczania
Nowoczesne maszyny i urządzenia stosowane we wszystkich gałęziach przemysłu, również
w górnictwie posiadają blok elektroniki sterującej, w skład którego wchodzą typowe układy
elektroniczne takie jak: wzmacniacze, prostowniki, generatory i inne, które są zbudowane
z elektronicznych elementów i układów półprzewodnikowych. Poniżej przedstawono wybrane
przykłady zastosowania urządzeń elektronicznych w górnictwie podziemnym.
Przewoźne stacje prostownikowe
W górnictwie stosowane sa nowoczesne zautomatyzowane stacje prostownikowe
przewoźne typy APSP, oparte na diodach krzemowych lub tyrystorach. Umożliwiają one
w zakresie przewozu podziemnego na zasilanie w dogodny sposób sieci trakcyjnej w dowolnie
wybranym punkcie. Rozmieszczenie ułatwiają ich małe gabaryty przy pełnym wyposażeniu
aparaturowym oraz pełna automatyka pracy, niewymagająca stałej obsługi. Stacja jest
dodatkowo wyposażona w podzespoły oraz elementy do zdalnej kontroli stacji i sterowania.
Napędy sterowane
W górnictwie podziemnym stosuje napędy regulowane z silnikami prądu przemiennego
oraz z silnikami prądu stałego. Do regulacji prędkości obrotowej stosuje się m.in. układy
prostowników
sterowanych
(najczęściej
tyrystorowych),
falowniki,
przemienniki
częstotliwości zbudowane z przyrządów półprzewodnikowych (diod, tyrystorów,
tranzystorów mocy). Półprzewodnikowe przyrządy mocy z kolei załączane są za
pośrednictwem sterowników elektronicznych niskonapięciowych, których zadaniem jest
wytworzenie i podanie na ppm impulsu załączajacego.
Łączność telefoniczna – radiowa w trakcji przewodowej
W trakcji elektrycznej przewodowej dla celów łączności przewodowej pomiędzy
dyspozytorem a kierowcami elektrowozów stosowany jest simpleksowy (dwustronny)
radiotelefon TRG-2 pracujący na częstotliwości 100 kHz. Radiotelefony są instalowane
na poszczególnych lokomotyach oraz u dyspozytora przewozu. Umożliwiają one
bezpośrednie porozumiewanie się wszystkim dysponentom radiotelefonów ze sobą.
W obudowie metalowej zamontowany jest zestaw elementów elektronicznych nadawczo-
odbiorczych. Zestaw ten składa się z części nadawczej, którą tworzy wzbudnica
oraz wzmacniacz mocy wielkiej częstotliwości z mikrofonem oraz z części odbiorczej,
którą tworzy odbiornik FM i wzmacniacz małej częstotliwości z głośnikiem.
Rys. 35. Urządzenie łączności głośnomówiącej GTL [15]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Urządzenie GTL (rys. 35) służy do prowadzenia łączności głośnomówiącej oraz do
emitowania sygnałów ostrzegawczych i porozumiewawczych wzdłuż zautomatyzowanych
tras przenośników taśmowych, zgrzebłowych, kolejek szynowych, podwieszonych
i spągowych, kołowrotów itp. Urządzenie jest przystosowane do współpracy z układami
automatyzacji przenośników (np. USPP) oraz układami sterowania kolejkami podwieszonymi
głównie w podziemiach kopalń metanowych.
Urządzenie GTL posiada obudowę stalową, na której bokach umieszczono obudowane
głośniki przemysłowe o dużej skuteczności oraz wpusty kablowe. Wewnątrz obudowy
znajduje się moduł zawierający układy elektroniczne i akumulatory oraz listwa zaciskowa do
podłączenia kabla 9-żyłowego.
4.8.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie układy elektroniczne wchodzą w skład bloków elektroniki sterującej nowoczesnych
maszyn i urządzeń górniczych?
2. Jakie zalety posiadają przewoźne stacje prostownikowe zbudowane w oparciu
o półprzewodnikowe diody lub tyrystory?
3. Z jakich części składa się zestaw elementów elektronicznych radiotelefonu TRG-2?
4. Jakie najczęściej przekształtniki energoelektroniczne są stosowane w regulowanych
napędach elektrycznych?
4.8.3. Ćwiczenia
Ćwiczenie 1
Przygotuj prezentację multimedialną dotyczącą elektronicznych urządzeń stosowanych
w górnictwie podziemnym. Powinna ona stanowić przegląd dostępnych na rynku rozwiązań
elektroniki sterującej, zabezpieczeń i sygnalizacji oferowanych przez producentów.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać poszukiwań w różnych źródłach informacji,
2) wykonać prezentację multimedialną w programie PowerPoint pakietu Microsoft Office,
3) dokonać prezentacji swojej pracy,
4) dokonać oceny ćwiczenia.
Wyposażenie stanowiska pracy:
−
katalogi, dokumentacja techniczna,
−
karty katalogowe,
−
komputer z dostępem do Internetu,
−
skaner,
−
dyskietka (płyta CD).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
4.8.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) opisać zasadę działania simpleksowego radiotelefonu stosowanego do
łączności bezprzewodowej w kopalniach?
¨
¨
2) określić zadania realizowane przez urządzenie GTL?
¨
¨
3) podać przykłady urządzeń elektronicznych i ich parametry, stosowanych
w górnictwie podziemnym?
¨
¨
4) podać, w jakich kopalniach można stosować urządzenie GTL?
¨
¨
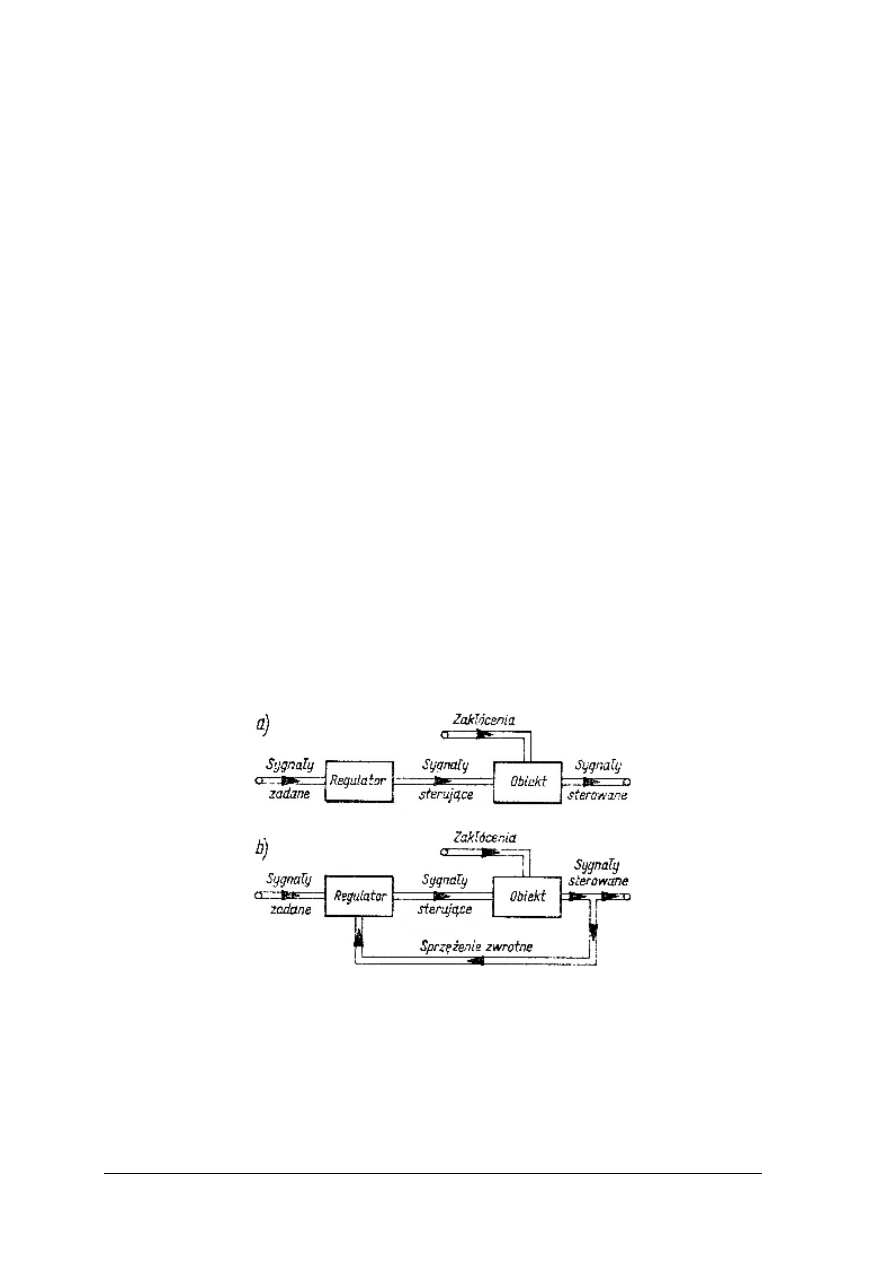
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
4.9. Podstawowe układy automatyki przemysłowej
4.9.1. Materiał nauczania
Sterowanie jest to oddziaływanie na określony obiekt sterowania (proces sterowania)
w celu osiągnięcia żądanego zachowania się, zgodnego z zadanym sterowaniem. Wielkości
fizyczne, za pomocą których otoczenie oddziałuje na obiekt, nazywamy wielkościami
wejściowymi obiektu. Wielkości, za pomocą których obiekt oddziałuje na otoczenie,
nazywamy wielkościami wyjściowymi. Wielkości powodujące niezamierzone, przypadkowe
oddziaływanie otoczenia na obiekt, nazywamy wielkościami zakłócającymi.
Sygnały wyjściowe obiektu sterowania są zwane sygnałami sterowanymi, a sygnały
wejściowe to sygnały sterujące – realizujące sterowanie obiektu oraz zakłócenia – wszelkie
inne oddziaływania, utrudniające realizację zadania sterowania.
Zadanie sterowania ma zazwyczaj postać żądanego przebiegu sygnałów sterowanych
i jest wówczas zwane sygnałem zadanym.
Układ dokonujący sterowania – wytwarzający sygnały sterujące – jest zwany
urządzeniem sterującym. Sygnałem wejściowym urządzenia sterującego jest informacja
o zadaniu sterowania. Urządzenie sterujące i obiekt stanowią układ sterowania, który może
być otwarty lub zamknięty (rys. 36).
W otwartym układzie sterowania urządzenie sterujące nie otrzymuje zwrotnej informacji
o aktualnej wartości sygnału sterowanego, natomiast w układzie zamkniętym, ze sprzężeniem
zwrotnym, otrzymuje ją, przy czym informacja ta wpływa na przebieg sterowania.
Układy sterowania otwartego występują we wszelkich rodzajach automatów o działaniu
cyklicznym. Do tych urządzeń należą automaty handlowe (np. sprzedaż biletów, napojów),
automaty oświetleniowe, itp. W każdym z nich sygnał wejściowy inicjujący cykl powoduje
pojawienie się określonej wielkości wyjściowej z obiektu, np. po wrzuceniu monety, żetonu
(sygnał wejściowy) uzyskuje się puszkę napoju (sygnał wyjściowy).
Rys. 36. Układy sterowania: a) otwarty, b) zamknięty [3, s. 75]
Sterowanie w układzie zamkniętym nazywa się regulacją. Odpowiednio zaś: układ
sterowania – układem regulacji, obiekt sterowania – obiektem regulacji, urządzenie sterujące
– urządzeniem regulującym (regulatorem), sygnał sterowany – sygnałem regulowanym.
Sygnał oddziaływania regulatora na obiekt jest dalej nazywany sygnałem sterującym.
Istotą tej struktury jest występowanie toru, po którym wielkość wyjściowa y z wyjścia
obiektu jest przesyłana na jego wejście. W układzie tworzy się zamknięty obwód
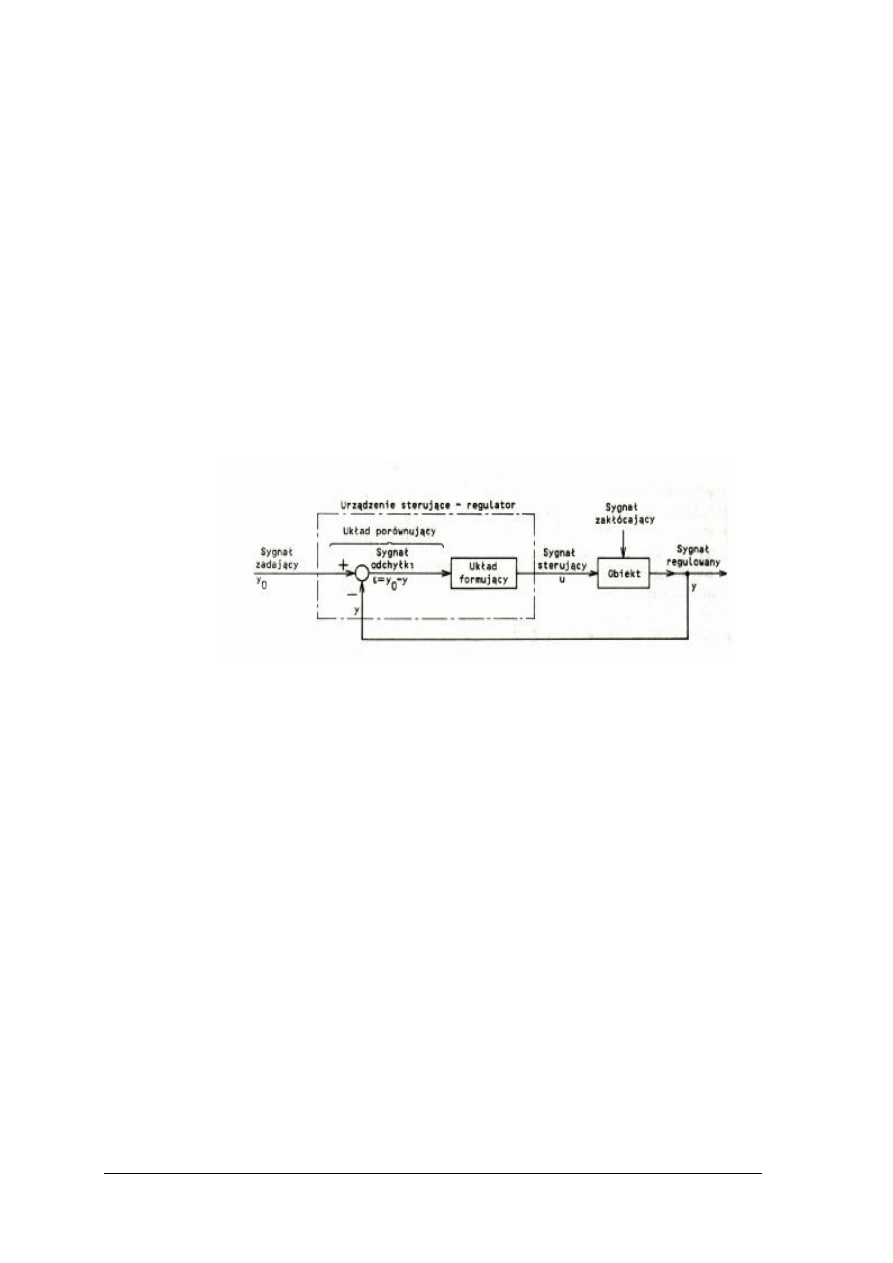
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
przekazywania sygnałów. Układ o tej strukturze sterowania jest układem sterowania ze
sprzężeniem zwrotnym.
W układach sterowania ze sprzężeniem zwrotnym do elementarnych zadań sterowania
należy realizacja warunku
y
0
– y = ε
→
0
tzn. utrzymanie odchyłki (uchybu) regulacji ε na poziomie bliskim zeru, co jest równoznaczne
ze stabilizacją sygnału y na poziomie y
0
.
Układy sterowania, których celem jest spełnienie tego elementarnego warunku, należą
do układów regulacji.
W układzie regulacji sygnał regulowany jest wprowadzany do regulatora przez tzw.
ujemne sprzężenie zwrotne. Takie oddziaływanie obiektu na regulator jest charakterystyczne
dla wszystkich układów regulacji.
Zadaniem regulatora jest takie oddziaływanie na obiekt regulacji, aby odchyłka regulacji
była bliska zera (rys. 37). Regulator podzielono na układ porównujący, który wytwarza sygnał
odchyłki, oraz układ formujący, który przekształca sygnał odchyłki na sygnał sterujący.
Sprzężenie zwrotne jest ujemne, co zaznaczono za pomocą znaku minus na wejściu układu
porównującego.
Rys. 37. Schemat prostego układu regulacji automatycznej [10, s. 16]
Klasyfikacja układów regulacji
Układy regulacji można podzielić, jak wszystkie układy dynamiczne, na ciągłe
i impulsowe, liniowe i nieliniowe.
Własności regulatora są zwykle ustalone z góry i z założenia niezmienne w czasie.
W bardziej złożonych przypadkach, gdy równania obiektu, charakter zadania sterowania
lub zakłócenia zmieniają się w czasie pracy układu, może być pożądane dopasowanie
(adaptacja) równania regulatora. Układy regulacji o celowo zmieniających się równaniach
regulatora są zwane układami adaptacyjnymi.
Jeżeli w czasie syntezy układu regulacji dążymy do uzyskania najlepszych wskaźników
jakości, nie ograniczając struktury regulatora, to taki układ nazywamy układem optymalnym.
Jeżeli typ regulatora jest z góry zadany, a synteza zapewnia najlepsze wskaźniki jakości
jedynie wśród regulatorów danego typu, to taki układ nazywamy układem parametrycznie
optymalnym.
Ze względu na realizowane zadania sterowania układy dzielimy na:
−
układy sterowania stałowartościowego, w których sygnał zadany przybiera stałą wartość,
−
układy sterowania programowego, w których sygnał zadany jest znanym z góry programem,
−
układ sterowania nadążnego, w którym sygnał zadany ma charakter nieprzewidziany,
przypadkowy,
−
układy sterowania ekstremalnego (bez jawnie występującego sygnału zadanego),
gdzie zadaniem jest utrzymanie jednego z sygnałów wyjściowych obiektu na wartości
maksymalnej lub minimalnej,
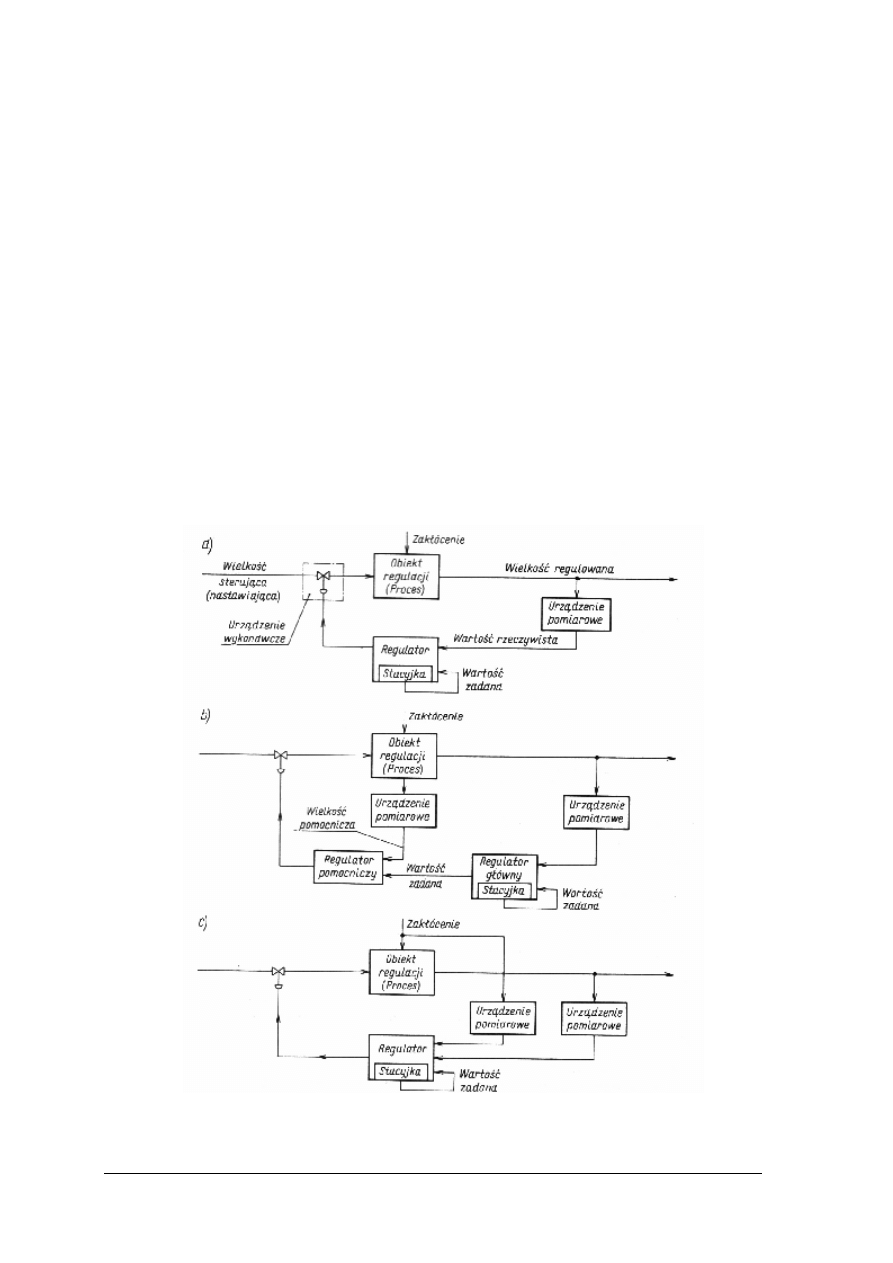
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
−
układy sterowania sekwencyjnego, w których algorytm działania jest wcześniej
określony, składający się z ciągu prostych zadań realizowanych kolejno, przy czym
przejście do następnego z tych zadań zależy od realizacji poprzednich zadań albo od
spełnienia innych warunków.
Rodzaje układów automatyki
Do najczęściej spotykanych układów regulacji należą jednoobwodowe układy stabilizacji
automatycznej (regulacji stałowartościowej – rys. 38 a), w których wartość zadana w trakcie
normalnej pracy układu nie ulega zmianom. Coraz częściej stosowane są też układy
z pomiarem zakłóceń (rys. 38 c) oraz układ regulacji kaskadowej (rys. 38 b). W tym ostatnim
układzie są dwa regulatory: regulator główny i regulator pomocniczy.
Zadaniem regulatora głównego jest utrzymanie na zadanym poziomie wielkość
regulowaną.
Regulator pomocniczy natomiast ma utrzymywać taką wartość pewnej wielkości
pomocniczej, jaka wynika z zadania realizowanego przez regulator główny. Regulator główny
wytwarza wartość zadaną dla regulatora pomocniczego. Układ regulacji kaskadowej
umożliwia więc na eliminację wpływu zakłócenia działającego na wejściu obiektu, nie
poprzez bezpośredni pomiar zakłócenia, ale poprzez pomiar pomocniczej wielkości
wyjściowej, na zmiany której największy wpływ ma to zakłócenie.
Rys. 38. Schemat blokowy układu regulacji: a) jednoobwodowego, b) kaskadowego, c) z pomiarem zakłóceń
[6, s. 12]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
4.9.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest zasadnicza różnica między otwartym a zamkniętym układem sterowania?
2. Z jakich elementów składa się układ sterowania?
3. Jak tworzy się odchyłkę regulacji?
4. Jakie jest zadanie regulatora głównego w układzie regulacji kaskadowej?
5. Jakie mogą być zadania sterowania?
4.9.3. Ćwiczenia
Ćwiczenie 1
Ze względu na realizowane zadania sklasyfikuj poniższe układy regulacji:
−
radarowe układy lotnicze,
−
zmywarka do naczyń,
−
lodówka,
−
obrabiarka dorabiająca klucze.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym o układach regulacji,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przeprowadzić analizę działania wymienionych urządzeń,
4) określić zadanie sterowania realizowane przez poszczególne urządzenia,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
przybory do pisania,
−
literatura z rozdziału 6.
Ćwiczenie 2
Masz do rozpatrzenia dwa przypadki:
a) statek po zderzeniu z górą lodową ma uszkodzoną burtę, przez którą wlewa się woda,
co powoduje zatapianie statku i jeszcze intensywniejsze wlewanie się wody;
b) kierowca „dodaje gazu”, samochód przyspiesza i po chwili osiąga nową stałą prędkość.
Czy występuje w obu tych przypadkach zjawisko sprzężenia zwrotnego? Jeśli tak, to jaki
znak mają te sprzężenia?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o układach regulacji,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) przeanalizować zachowanie się statku w chwili katastrofy,
4) określić czy występuje zależność pomiędzy ilością wlewającej się wody a szybkością
zatapiania statku, jeżeli tak to jaka to jest zależność,
5) przeanalizować zachowanie się samochodu po „dodaniu gazu”,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
6) określić czy występuje zależność pomiędzy „dodaniem gazu” a nową prędkością
samochodu,
7) określić jaka różnica występuje pomiędzy tymi przypadkami,
8) określić rodzaj sprzężenia zwrotnego,
9) zaprezentować wykonane ćwiczenie,
10) dokonać oceny poprawności wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
–
zeszyt,
–
przybory do pisania,
–
literatura z rozdziału 6.
Ćwiczenie 3
Dla żelazka z termoregulatorem określ:
−
wielkość regulowaną wartość zadaną, sygnał sterujący i sygnał zakłócający,
−
obiekt regulacji, urządzenie pomiarowe i urządzenie regulujące.
Określ zadanie sterowania realizowane przez żelazko. Jakie skutki pociągnie za sobą
zaspawanie styków wyłącznika bimetalowego?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym dotyczącym układów regulacji,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zaobserwować sposób działania żelazka z termoregulatorem,
4) określić zadanie sterowania realizowane przez żelazko z termoregulatorem podczas
prasowania,
5) określić sygnały zadany, sterujący, zakłócający i regulowany,
6) podać, które elementy żelazka pełnią rolę obiektu regulacji, urządzenia pomiarowego
i urządzenia wykonawczego,
7) przeanalizuj skutki zaspawania styków wyłącznika bimetalowego,
8) zaprezentować wykonane ćwiczenie,
9) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
żelazko z termoregulatorem,
−
deska do prasowania (ewentualnie kocyk),
−
szmatka do prasowania,
−
zeszyt,
−
przybory do pisania,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
4.9.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) rozpoznać i sklasyfikować układy regulacji występujące np. w Twoim
mieszkaniu?
¨
¨
2) określić zadanie sterowania realizowane przez artylerię przeciwlotniczą?
¨
¨
3) narysować schemat blokowy układy regulacji?
¨
¨
4) wyjaśnić dlaczego w układach regulacji występuje ujemne sprzężenie
zwrotne?
¨
¨
5) określić podstawowy cel układów regulacji?
¨
¨
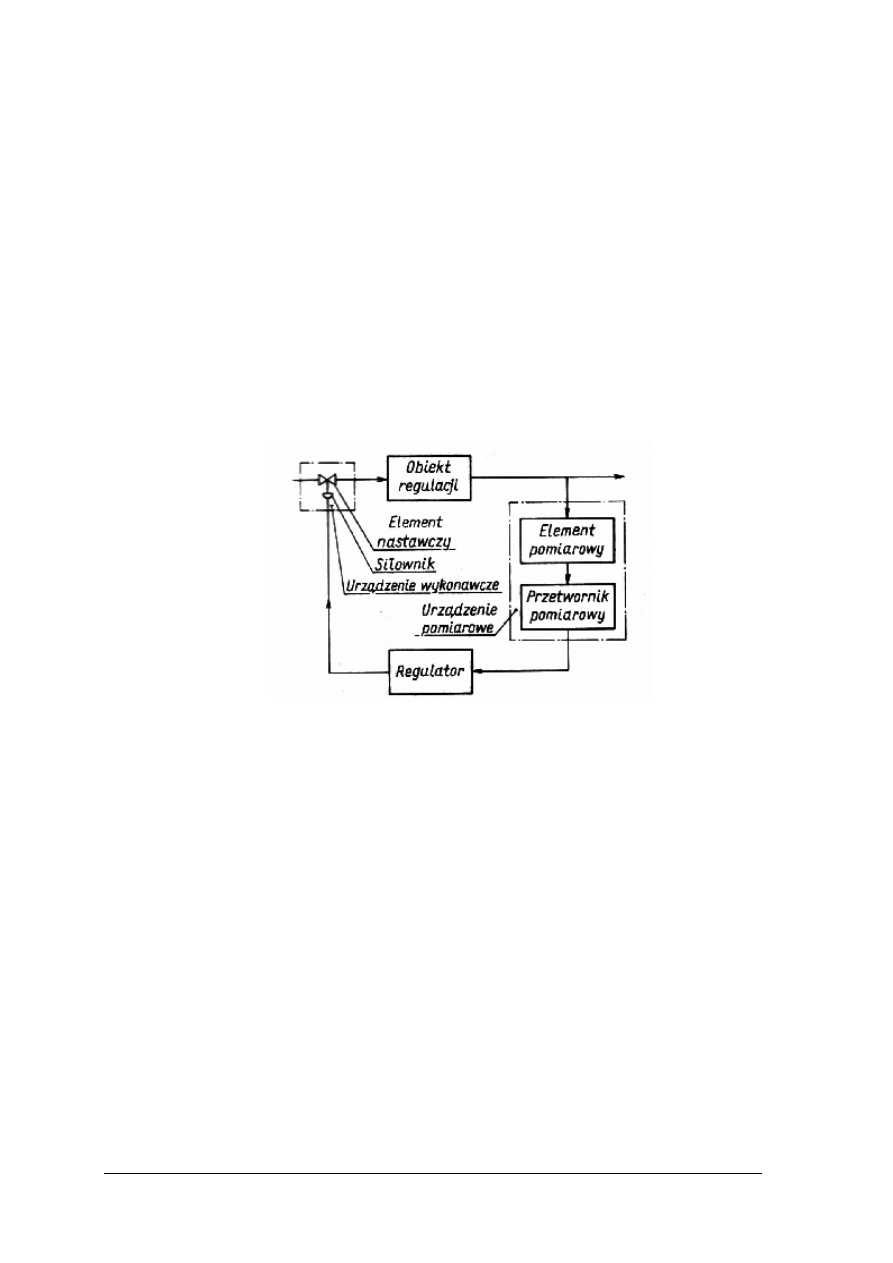
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
4.10. Układy i elementy automatycznej regulacji
4.10.1. Materiał nauczania
Układ automatycznej regulacji i jego podstawowe elementy
Elementami w automatyce są nazywane człony spełniające w układzie bądź urządzeniu
proste funkcje, takie jak: wzmocnienie sygnału, porównanie sygnałów, zmiana postaci
sygnału. Członem więc jest: czujnik pomiarowy, element porównujący, zawór, silnik,
wzmacniacz, człon dynamiczny, itp.
Urządzeniami w automatyce są nazywane człony spełniające funkcje bardziej złożone.
W skład urządzenia wykonawczego wchodzą elementy nastawcze i napędowe (siłowniki),
urządzenia pomiarowego – czujniki i przetworniki pomiarowe. Do urządzeń zaliczamy także
regulatory, rejestratory, zespoły zasilające, urządzenia cyfrowe.
Układ automatyki powstaje z połączenia elementów i urządzeń w pewien zespół
wykonujący określone zadanie (rys. 39).
Rys. 39. Schemat blokowy układu regulacji [6, s. 14]
Na schemacie blokowym widać, że do zestawienia układu potrzebne jest urządzenie
pomiarowe, urządzenie wykonawcze oraz regulator. Zadaniem urządzenia pomiarowego jest
pomiar wielkości regulowanej. Sygnał wyjściowy z tego urządzenia jest dla układu regulacji
źródłem informacji o aktualnej wartości wielkości regulowanej. W urządzeniu pomiarowym
możemy wyróżnić element pomiarowy oraz przetwornik pomiarowy. Zadaniem czujnika jest
bezpośredni pomiar wielkości regulowanej, natomiast przetwornik przekształca zmierzoną
wielkość na inną postać, którą można podać na regulator.
Głównym urządzeniem układu regulacji jest regulator. Zadaniem regulatora jest
utrzymywanie wartości wielkości regulowanej maksymalnie zbliżonej do wartości zadanej,
zapewniającej najkorzystniejszy przebieg procesu technologicznego. Często w skład
regulatora wchodzi zadajnik wartości zadanej. Regulator porównuje obie wartości: zadaną
i rzeczywistą regulowaną. W wyniku tego porównania wytwarza sygnał sterujący, którego
zadaniem jest takie zadziałanie na obiekt, aby różnicę pomiędzy wartością rzeczywistą
a wartością zadaną sprowadzić do zera.
Regulator oddziałuje na obiekt za pośrednictwem urządzenia wykonawczego,
składającego się, w tym przypadku, z elementu nastawczego (zaworu) sterującego wartością
sterującą i siłownika zapewniającego uzyskanie odpowiedniej siły do przestawienia elementu
nastawczego.
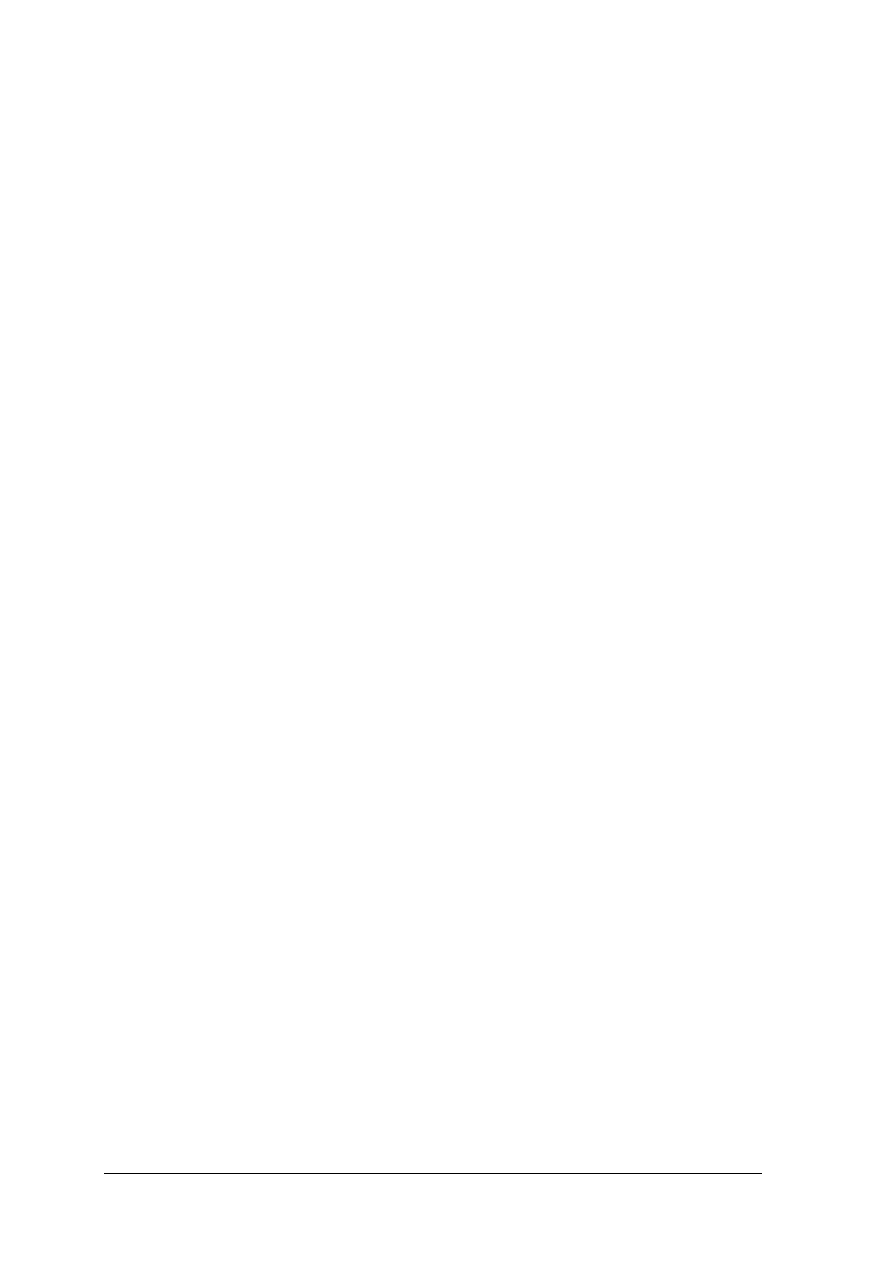
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
Klasyfikacja elementów i urządzeń automatyki
Ze względu na rodzaj energii pomocniczej (zasilającej) elementy i urządzenia możemy
podzielić na:
−
pneumatyczne,
−
hydrauliczne,
−
elektryczne.
W elementach i urządzeniach pneumatycznych niezbędna do działania energia jest
dostarczana za pośrednictwem sprężonego powietrza. Znalazły one szerokie zastosowanie
w układach automatyki dzięki zaletom mającym istotne znaczenie w eksploatacji instalacji
przemysłowych. Odznaczają się prostotą budowy, małymi wymiarami i znikomą masą
elementów,
łatwą
konserwacją,
niezawodnością
i
bezpieczeństwem
działania
(są wykorzystywane w obiektach zagrożonych eksplozją i wybuchem). Urządzenia
pneumatyczne praktycznie są niewrażliwe na wahania temperatury, działanie pola
magnetycznego
i promieniowanie
radioaktywne.
W
porównaniu
z
elementami
hydraulicznymi elementy pneumatyczne pracują na czynniku łatwo dostępnym, nie wymagają
rurociągów spływowych, zbiorników itp. Praktycznie uzyskiwane moce są mniejsze niż
w siłownikach hydraulicznych.
W elementach pneumatycznych w odróżnieniu od elementów elektrycznych można łatwo
otrzymać duże stałe czasowe. Natomiast trudno jest uzyskać dużą dokładność i powtarzalność
nastaw regulatorów. Ściśliwość powietrza, która jest korzystna przy kształtowaniu
właściwości dynamicznych za pomocą sprzężeń zwrotnych, wprowadza opóźnienia
w obwodzie regulacji, szczególnie przy większych odległościach. Sygnał w urządzeniach
pneumatycznych nie może być przesyłany na duże odległości (max. do 300 m). Przy
odległościach ponad 200 m stosuje się odpowiednie wzmacniacze, co podraża koszt instalacji.
Warunkiem poprawnego działania urządzeń pneumatycznych jest bardzo dokładne
oczyszczenie powietrza zasilającego z pyłu, wilgoci i oleju.
Elementy i urządzenia hydrauliczne wyróżniają się bardzo wysokim stopniem
niezawodności działania, samosmarownością i dużą trwałością oraz prostą konstrukcją.
Ich najważniejszą zaletę stanowią stosunkowo duże siły i moce oraz małe stałe czasowe
siłowników, a także dobre właściwości regulacyjne, głównie dzięki nieściśliwości cieczy,
będącej nośnikiem energii, przez co do układu nie wprowadza się zakłóceń. Wadami
urządzeń hydraulicznych są stosunkowo duże wymiary i masa, zależność lepkości olejów
hydraulicznych od temperatury, kłopotliwe przesyłanie sygnałów, przecieki oleju powodujące
straty oraz zanieczyszczenie otoczenia, co może być przyczyną pożaru oraz ograniczone
możliwości kształtowania właściwości dynamicznych regulatorów i wykonywania operacji
matematycznych.
Elementy i urządzenia elektryczne pobierają energię z sieci elektrycznej, która jest łatwo
dostępna. Zalety urządzeń elektrycznych to m.in. bardzo wygodne i dokładne pomiary
elektryczne, przesyłanie sygnału może się odbywać na dowolne odległości i nie pociąga za
sobą praktycznie opóźnień, prowadzenie torów przewodów elektrycznych jest znacznie
prostsze i tańsze niż przewodów pneumatycznych i hydraulicznych, najszerszy zakres
zastosowań pod względem mocy i rodzaju parametru regulowanego, szerokie możliwości
centralizacji pomiarów, rejestracji, współpracy z komputerami sterującymi procesami. Do
najważniejszych wad urządzeń elektrycznych zalicza się ograniczony zakres ich stosowania w
warunkach, w których istnieje niebezpieczeństwo wybuchu (wprowadzają zagrożenie
pożarowe) lub konieczność stosowania elementów w wykonaniu iskrobezpiecznym, a także
skomplikowane, kosztowne i kłopotliwe w eksploatacji siłowniki i wzmacniacze mocy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
Ze względu na funkcje spełniane w układach automatyki elementy i urządzenia
elektryczne możemy podzielić na:
−
pomiarowe (czujniki, przetworniki, zespoły pomiarowe),
−
wykonawcze (np. zawory, zasuwy, silniki, siłowniki, elektromagnesy, pompy, regulatory
bezpośredniego działania),
−
tzw. części centralnej (urządzenia tej grupy najczęściej montowane są nie przy obiekcie
ale w wydzielonym pomieszczeniu, tzn. w centralnej sterowni – są to np. regulatory,
stacyjki manipulacyjne, rejestratory, bloki matematyczne, sterowniki, komputery,
mikrokomputery lub minikomputery).
Klasyfikując elementy i urządzenia według sposobu działania dzielimy je na analogowe
oraz cyfrowe.
Podstawowe urządzenia automatyki
Urządzenia pomiarowe w układach automatycznej regulacji
Urządzenia pomiarowe w układach automatyki powinny charakteryzować szczególną
niezawodnością oraz dokładnością działania. Wynika to z faktu, że w układach regulacji
urządzenia pomiarowe nie są objęte sprzężeniem zwrotnym i ich błędy nie są eliminowane
przez działanie sprzężenia zwrotnego ale w całości przenoszą się na dokładność regulacji.
Zadaniem urządzeń i układów pomiarowych w układach sterowania jest:
−
dostarczanie informacji o bieżącej wartości kontrolowanych parametrów,
−
rejestrowanie wyników pomiarów,
−
wytwarzanie sygnału dla regulatora,
−
opracowanie wyników pomiarów,
−
sygnalizowanie nadmiernych odchyłek od pożądanej wartości określonych wielkości.
Czujnik jest to element układu pomiarowego, na który bezpośrednio oddziałuje wielkość
mierzona. Sygnał wyjściowy czujnika jest funkcją zmian mierzonej wielkości fizycznej.
Przetwornik przekształca sygnał wyjściowy czujnika na standardowy sygnał elektryczny
lub pneumatyczny, aby umożliwić łączenie układów pomiarowych z innymi urządzeniami
wchodzącymi w skład układów regulacji.
Dla aparatury produkowanej w Polsce przyjęto następujące sygnały standardowe:
−
elektryczny 0 ÷ 5 mA, 0 ÷ 20 mA lub 4 ÷ 20 mA,
−
pneumatyczny 20 ÷ 100 kP.
Przetworniki pomiarowe podlegają takim samym wymaganiom jak inne elementy
urządzeń pomiarowych, szczególnie jeśli chodzi o klasę dokładności. Są budowane jako
układy bez sprzężenia zwrotnego lub jako autokompensacyjne układy ze sprzężeniem
zwrotnym. Klasa dokładności przetwornika autokompensacyjnego jest zdecydowanie wyższa
i dlatego dąży się do obejmowania nim jak największej części urządzenia pomiarowego.
Urządzenia wykonawcze
Zadaniem urządzeń wykonawczych w układzie regulacji jest takie oddziaływanie
na strumienie energii lub materiałów, aby został zrealizowany zamierzony przebieg procesu.
W odpowiedzi na sygnał wyjściowy z regulatora zmieniają one wartość wielkości
nastawiającej. Urządzenia wykonawcze składają się z elementu nastawczego i elementu
napędowego (w przypadku małej mocy sygnału wyjściowego z regulatora konieczny jest
jeszcze wzmacniacz mocy).
To właśnie element nastawczy wpływa bezpośrednio na wejściowy strumień
materiałowo-energetyczny. Elementami nastawczymi w układach regulacji procesów
przemysłowych są: zawory, zasuwy, przepustnice, żaluzje, dozowniki, pompy o zmiennym
wydatku, dławiki, dzielnika napięcia, transformatory z odczepami, itp.
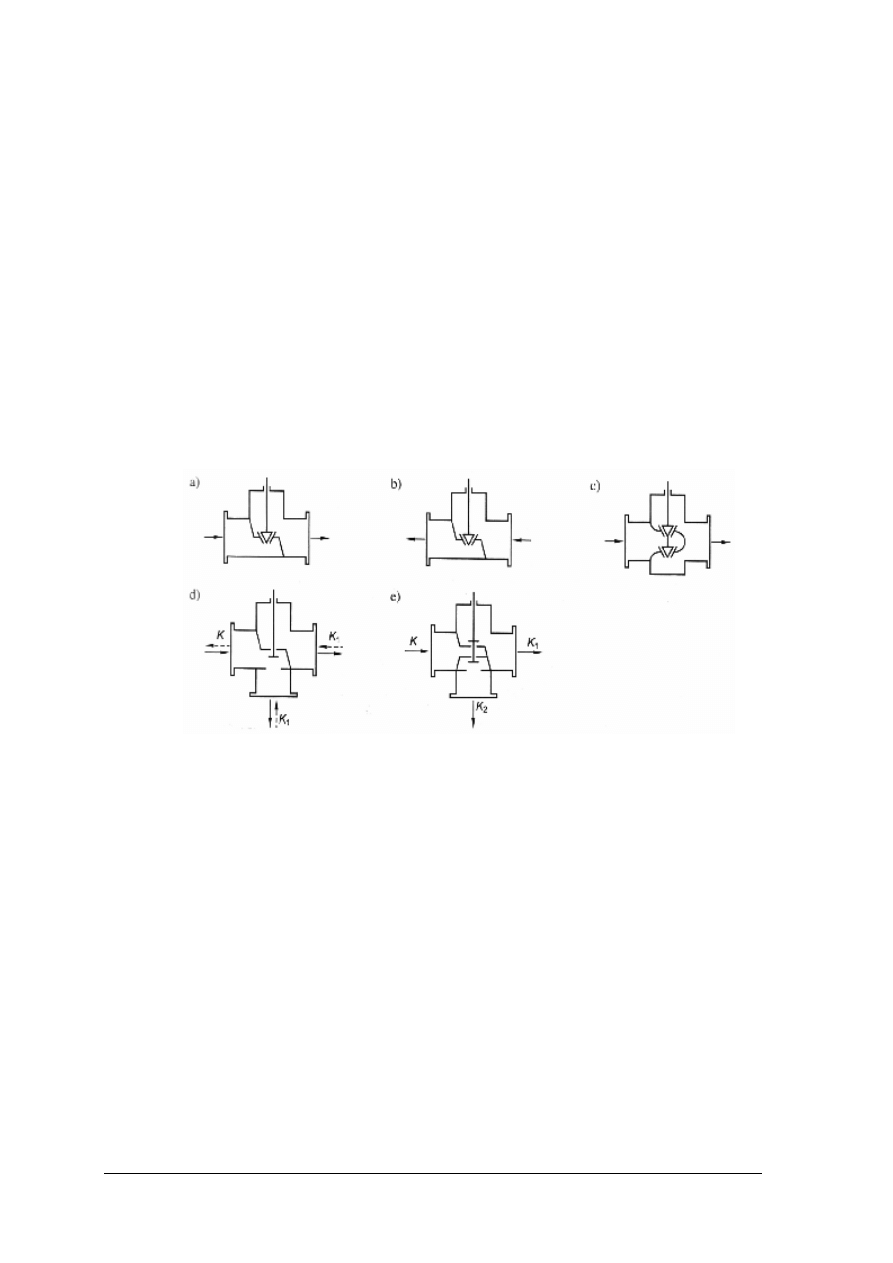
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
Elementy napędowe dostarczają energii mechanicznej, która jest niezbędna do
przestawienia elementu nastawczego według sygnału podanego z regulatora. Jako elementy
napędowe w układach regulacji są stosowane siłowniki, silniki, pompy, elektromagnesy,
zespoły napędowe, itp.
Elementy nastawcze
Elementy nastawcze umożliwiają oddziaływanie na przepływ energii lub materiałów
do lub od obiektu regulacji. Najczęściej stosowanymi nastawnikami w układach regulacji
procesów przemysłowych są zawory, przepustnice, żaluzje, różnego rodzaju dozowniki,
pompy o zmiennum wydatku, transformatory, dzielniki napięć itp.
Zawory nastawcze (rys. 40) dzieli się na zawory jednogniazdowe i dwugniazdowe.
W zaworach jednogniazdowych kierunek przepływu czynnika jest taki, że siła od
ciśnienia czynnika działa w kierunku otwierania zaworu. W zaworach wysokociśnieniowych
kierunek przepływu czynnika jest przeciwny do kierunku otwierania zaworu. W zaworach
dwugniazdowych siły od ciśnienia czynnika, działając przeciwnie na grzybki zaworu,
odciążają zawór. Zawory trójdrożne mogą być mieszające, rozdzielające lub mieszająco-
rozdzielające.
Rys. 40. Schematy konstrukcyjne zaworu: a) jednogniazdowego, b) jednogniazdowego wysokociśnieniowego,
c) dwugniazdowego, d) trójdrożnego mieszająco-rozdzielającego, e) trójdrożnego rozdzielającego
[5, s. 63]
Elementy napędowe
Elementy napędowe dostarczają energii mechanicznej, która jest niezbędna do
przestawienia elementu nastawczego zgodnie z sygnałem wyjściowym z regulatora. Jako
elementy napędowe w układach regulacji są stosowane silniki wykonawcze prądu stałego
i prądu
przemiennego,
siłowniki
pneumatyczne,
hydrauliczne,
elektryczne
elektrohydrauliczne i elektropneumatyczne.
Siłowniki
Siłowniki są to elementy napędowe służące w układach regulacji automatycznej do
nastawiania położenia zaworów i przepustnic. Stosowane są siłowniki pneumatyczne,
hydrauliczne, elektryczne oraz elektrohydrauliczne i elektropneumatyczne.
Siłowniki pneumatyczne dzielimy na trzy zasadnicze grupy:
1) membranowe,
2) tłokowe,
3) wirnikowe (silniki pneumatyczne).
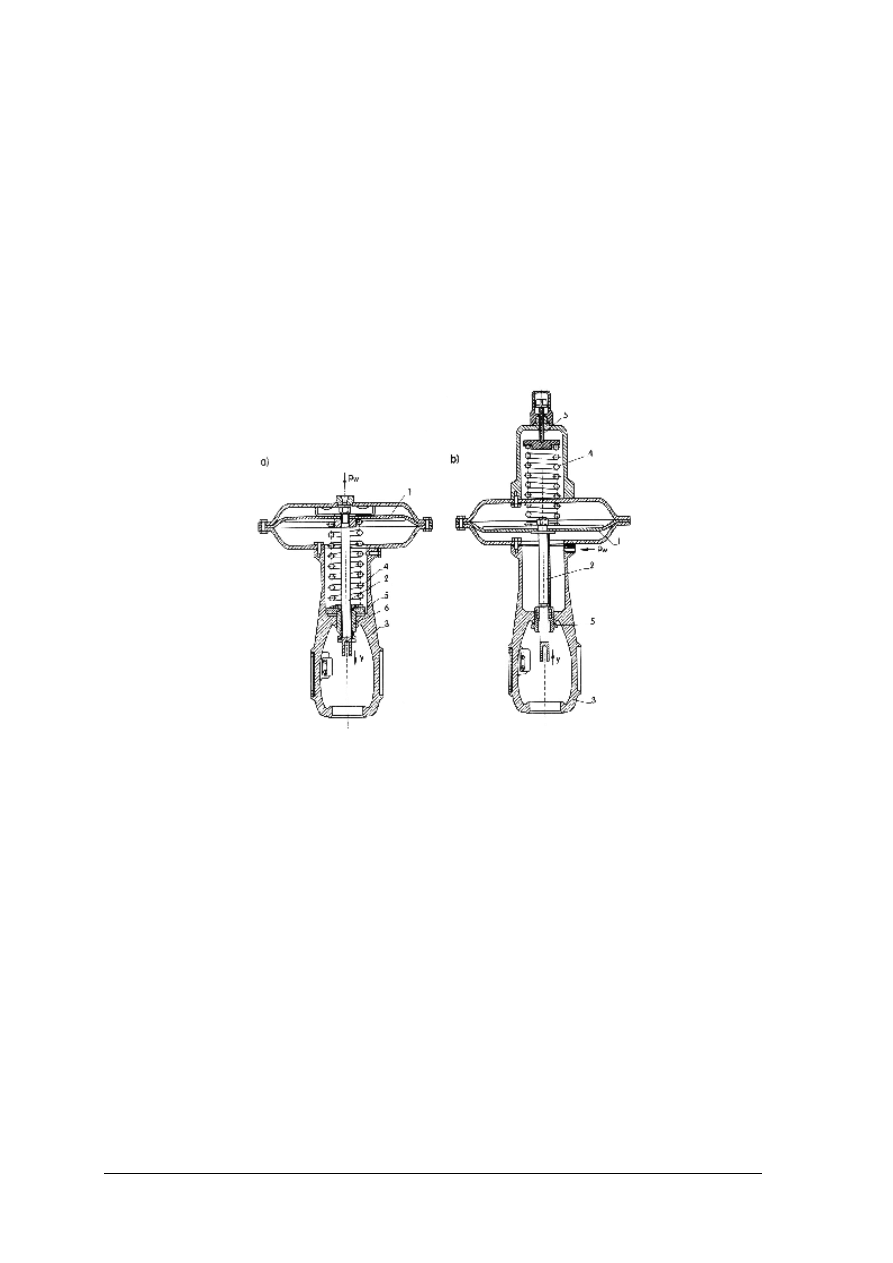
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
Siłowniki membranowe i tłokowe stosowane są jako:
−
siłowniki ze sprężyną zwrotną,
−
siłowniki bezsprężynowe,
−
nastawniki pozycyjne.
Siłowniki membranowe występują ponadto w dwóch typach rozwiązań konstrukcyjnych,
tj. jako siłowniki o działaniu:
−
prostym,
−
odwrotnym.
W siłowniku membranowym ze sprężyną zwrotną o działaniu prostym (rys. 41a)
ciśnienie sterujące, doprowadzone nad górną pokrywę siłownika, działa na elastyczną
membranę, powodując jej ugięcie. Membrana (za pośrednictwem sztywnego talerza) naciska
na sprężynę.
Rys. 41. Siłowniki pneumatyczne membranowe ze sprężyną: a) prosty; b) odwrócony 1 – membrana, 2 – trzpień,
3 – obudowa, 4 – sprężyna, 5 – nakrętka (rys. a) lub śruba (rys. b), 6 – śruba regulacyjna [12, s. 87]
Ruch membrany jest przenoszony za pośrednictwem trzpienia na zewnątrz obudowy
siłownika. Sprężyna służy do nastawienia początkowego punktu pracy siłownika. Do
regulacji wstępnego naciągu sprężyny służy wkręcana w obudowę śruba regulacyjna.
Siłownik o działaniu odwrotnym (rys. 41 b) różni się umieszczeniem sprężyny zwrotnej.
Zaletą siłowników membranowych jest ich prosta budowa, duża niezawodność działania
oraz bezpieczeństwo pracy w atmosferze wybuchowej. Wadą siłowników membranowych
jest ograniczony skok trzpienia oraz występowanie histerezy w charakterystyce statycznej
siłownika, powodującej niedokładne ustawienie się grzybka zaworu. Występowanie histerezy
w charakterystyce statycznej jest wynikiem tarcia suchego trzpienia w prowadnicy
oraz w dławicy zaworu.
Poprawę właściwości statycznych i dynamicznych pneumatycznych siłowników
membranowych można uzyskać, stosując ustawnik pozycyjny. Zastosowanie nastawnika daje
kilkunastokrotne zmniejszenie histerezy i wpływu sił obciążenia na położenie trzpienia.
Dodatkowo zwiększa szybkość działania siłownika i umożliwia podwyższenie zakresu
ciśnienia działającego na membranę. Dzięki nastawnikowi można usunąć z siłownika
sprężynę. Zaletą takich bezsprężynowych siłowników jest wzrost nawet pięciokrotny siły
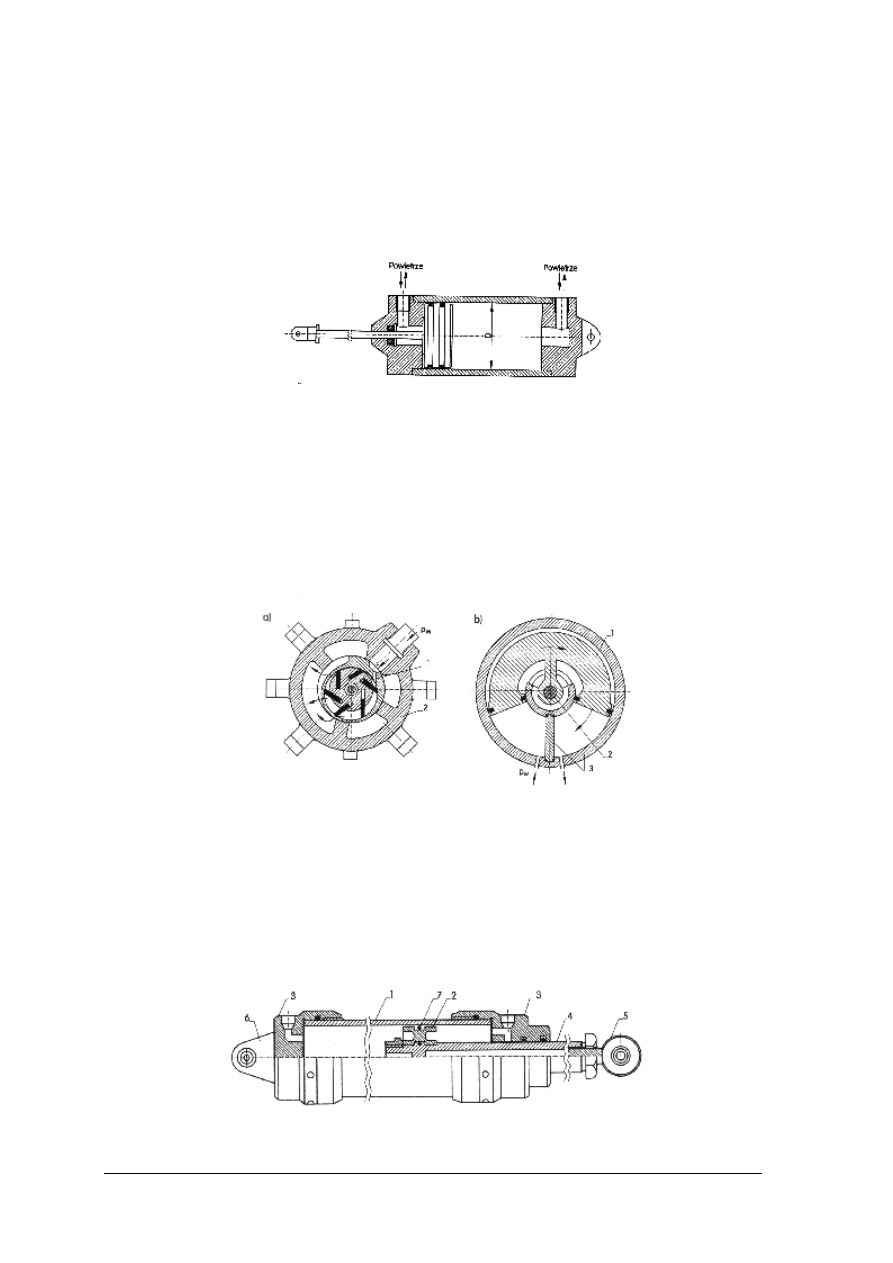
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
użytecznej, w porównaniu do siłowników sprężynowych; wadą – przyjmowanie
nieokreślonego położenia w przypadku awarii zasilania.
Dla większych przesunięć stosowane są siłowniki tłokowe. Rozróżnia się siłowniki
tłokowe jednostronnego działania (ze sprężyną powrotną) i dwustronnego działania (rys. 42).
Z reguły zasilane są podwyższonym ciśnieniem – zwykle 600 kPa. Siłowniki tłokowe,
szczególnie dwustronnego działania, wyposażone w nastawniki pozycyjne.
Rys. 42. Siłownik pneumatyczny tłokowy dwustronnego działania [12, s. 88]
Siłowniki pneumatyczne wirnikowe (rotacyjne – rys. 43a) stosuje się w przypadku
konieczności uzyskania dużych mocy (do 10 kW) i przesunięć. W silniku tym łopatkowy
wirnik jest osadzony mimośrodowo. Umieszczone w wirniku łopatki, pod wpływem działania
siły odśrodkowej wysuwają się, oddzielając szczelnie od siebie poszczególne komory.
Wpływający pod ciśnieniem czynnik roboczy wymusza ruch obrotowy wirnika.
Ruch obrotowy można także uzyskać za pomocą siłowników z wahadłowo-obrotowym
ruchem tłoczyska (rys. 43 b) napędzanego przez tłok torusowy.
Rys. 43. Siłowniki pneumatyczne obrotowe: a) wirnikowy: 1 – wirnik, 2 – obudowa; b) wahadłowo-obrotowy:
1 – tłok torusowy, 2 – wał napędowy, 3 – obudowa zprzegrodą [12, s. 89]
Siłowniki hydrauliczne (silniki) są wykonywane najczęściej jako tłokowe i obrotowe.
Silniki obrotowe stosuje się w napędach obrabiarek. W automatyce przemysłowej
wykorzystuje się głównie silniki tłokowe budowane w dwóch odmianach: jako siłowniki
proste i korbowe.
Siłownik hydrauliczny tłokowy prosty (rys. 44) jest siłownikiem działania dwustronnego.
Rys. 44. Siłownik hydrauliczny tłokowy dwustronnego działania: 1 – cylinder, 2 – tłok, 3 – głowice,
4 –tłoczysko, 5 – zaczep nastawny, 6 – ucho, 7 – gumowe pierścienie uszczelniające [12, s. 91]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
W celu spowolnienia ruchu tłoka w pobliżu jego skrajnych położeń, stosuje się tłumiki
krańcowe.
Siłowniki hydrauliczne pracują przy ciśnieniu w granicach 600÷8000 kPa. Siły
uzyskiwane na tłoczysku osiągają wartości rzędu kilkudziesięciu tysięcy niutonów.
Siłowniki hydrauliczne są używane przede wszystkim tam, gdzie są potrzebne duże siły,
a ruch nie może być za wolny, np. do przestawiania sterów dużych samolotów, poruszania
maszyn budowlanych, do przestawiania zaworów dławiących dopływ pary do turbin.
Siłowniki hydrauliczne konkurują z silnikami elektrycznymi, o podobnej mocy
gabarytami. W porównaniu z nimi są mniejsze i lżejsze.
Regulatory
Regulator to urządzenie, którego zadaniem w układzie regulacji jest wyznaczenie uchybu
regulacji oraz ukształtowanie sygnału wyjściowego o wartości zależnej od wartości uchybu
regulacji, czasu występowania uchybu i szybkości jego zmian, a także zapewnienie sygnałowi
wyjściowemu postaci i mocy potrzebnej do uruchomienia urządzeń wykonawczych.
Regulatory, ze względu na dostarczaną energię, możemy podzielić na regulatory:
−
bezpośredniego działania – nie korzystają z energii pomocniczej,
−
pośredniego działania – korzystają ze źródła energii pomocniczej – regulatory
pneumatyczne, hydrauliczne, elektryczne.
Regulatory możemy podzielić także ze względu na rodzaj sygnału wyjściowego na:
−
analogowe, gdzie sygnał wyjściowy ma postać ciągłą – regulatory typu P, I, PI, PD, PID,
−
dyskretne, gdzie sygnał wyjściowy ma postać nieciągłą – regulatory dwustawne,
trójstawne, krokowe, impulsowe, cyfrowe.
Ze względu na przeznaczenie regulatory mogą być:
−
uniwersalne,
−
specjalizowane (przeznaczone do regulacji jednej wielkości).
4.10.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zadania pełni w układzie regulacji urządzenie wykonawcze?
2. Jakie zalety i wady posiadają pneumatyczne elementy i urządzenia?
3. Jakie zalety i wady posiadają elementy i urządzenia hydrauliczne?
4. Czym różni się czujnik od przetwornika pomiarowego?
5. Jakie wymagania powinny spełniać urządzenia pomiarowe układach regulacji?
6. Jakie sygnały standardowe przyjęto w Polsce dla produkowanej aparatury?
7. Jak klasyfikujemy regulatory?
8. Jaka rolę spełniają urządzenia wykonawcze w układach sterowania?
9. Jakie zadanie pełni element nastawczy ?
10. Do czego służą siłowniki w układach regulacji automatycznej?
11. Jakie zalety i wady mają siłowniki membranowe?
12. Po co stosuje się nastawnik pozycyjny w siłownikach membranowych?
13. W jakim celu stosuje się tłumiki krańcowe w siłownikach hydraulicznych tłokowych?
14. Gdzie znalazły zastosowanie i dlaczego siłowniki hydrauliczne?
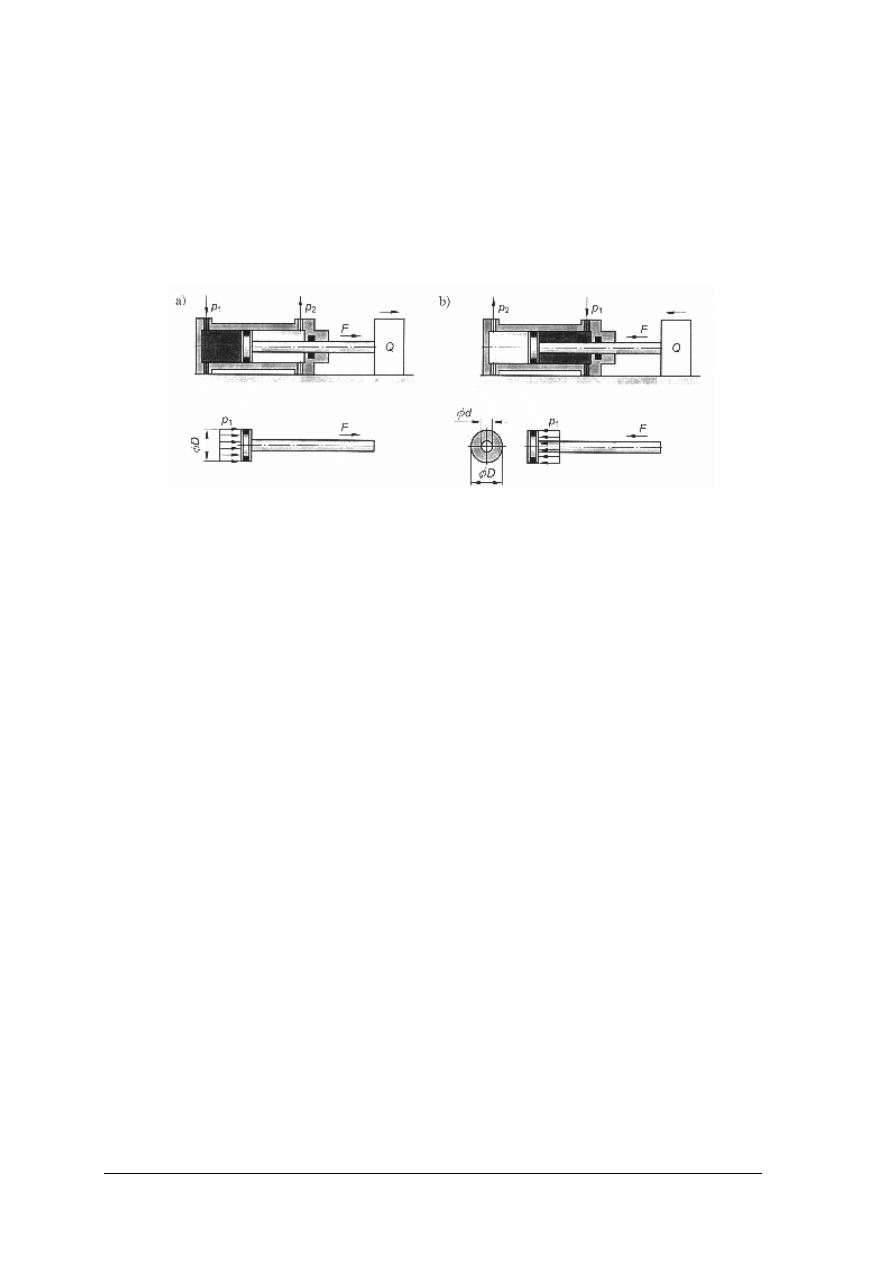
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
4.10.3. Ćwiczenia
Ćwiczenie 1
Na podstawie zaznaczonych na rysunku parametrów oblicz siły: ciągnącą i pchającą
w siłowniku. Porównaj, która siła jest większa i wyjaśnij dlaczego. Przeprowadź podobne
obliczenia dla siłownika z tłoczyskiem dwustronnym. Rozważ sytuację, gdy współczynnik
tarcia η = 0 oraz gdy η
≠
0 [8, s. 27].
Rysunek do ćwiczenia 3. [5, s. 76]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym dotyczącym siłowników,
2) przeanalizować różnice w powierzchniach tłoczysk,
3) wykonać obliczenia sił; ciągnącej i pchającej,
4) porównać otrzymane wyniki i wyjaśnić różnice,
5) przeprowadzić obliczenia dla siłownika z tłoczyskiem podwójnym,
6) wyjaśnić wpływ tarcia na otrzymane wyniki,
7) zapisać wnioski,
8) przedstawić wykonane ćwiczenie,
9) dokonać oceny pracy.
Wyposażenie stanowiska pracy:
–
literatura z rozdziału 6 poradnika,
–
zeszyt, przybory do pisania,
–
kalkulator.
4.10.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wyjaśnić
zasadę
działania
siłowników
dwustronnego
działania
z tłoczyskiem jednostronnym?
¨
¨
2) obliczyć siły: ciągnącą i pchającą w siłowniku?
¨
¨
3) podać wartości standardowych sygnałów elektrycznych i pneumatycznych?
¨
¨
4) wyjaśnić zasadę działania siłownika pneumatycznego membranowego ze
sprężyną zwrotną?
¨
¨
5) porównać wady i zalety pneumatycznych i hydraulicznych urządzeń automatyki?
¨
¨
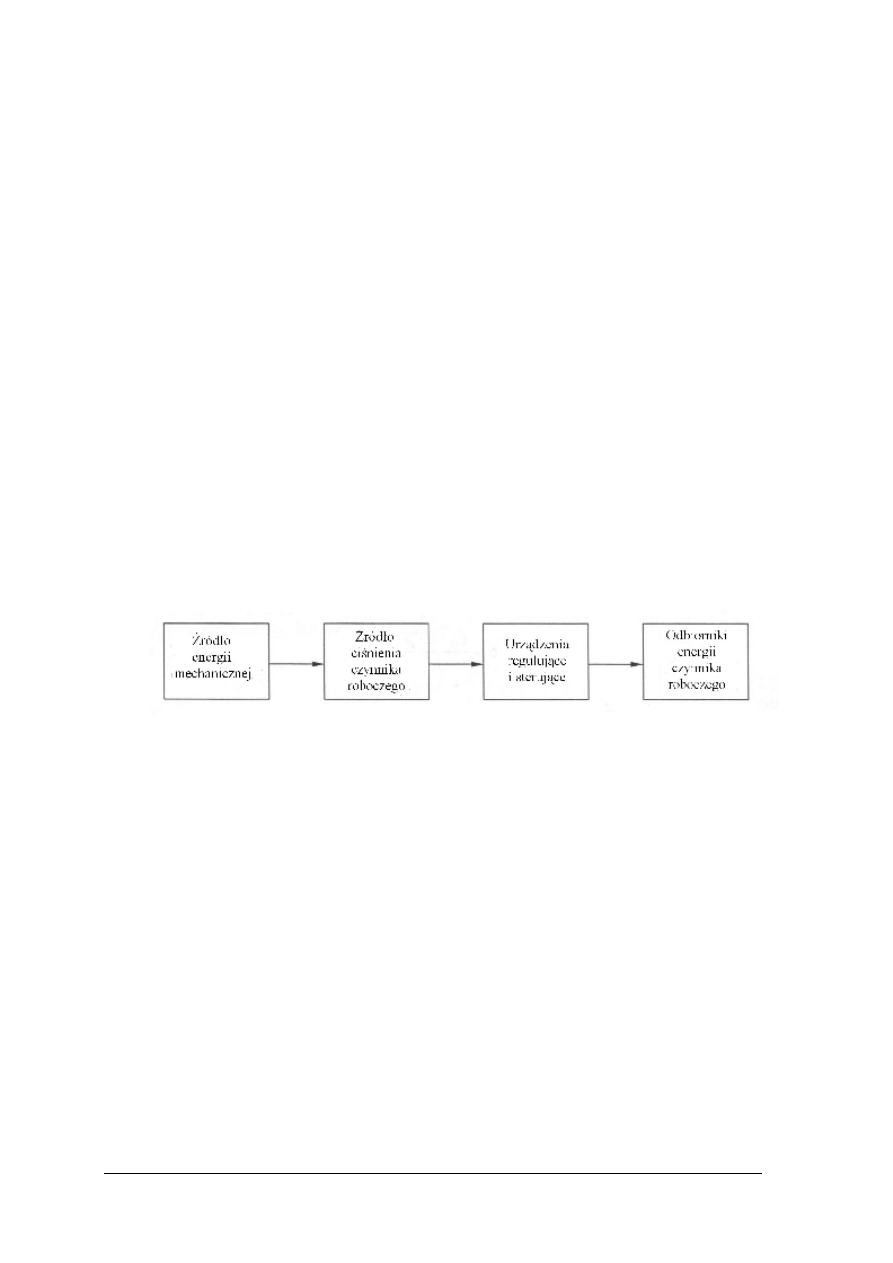
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
65
4.11. Układy sterowania: pneumatycznego i elektropneumatycznego
oraz hydraulicznego i elektrohydraulicznego
4.11.1. Materiał nauczania
Pojęcie napędu obejmuje całość zagadnień związanych z doprowadzeniem energii
mechanicznej z miejsca jej wytworzenia do odbiornika np. maszyn roboczych.
Wykorzystuje się wiele rodzajów napędów (elektryczny, spalinowy, pneumatyczny,
hydrauliczny, wiatrowy, wodny), jednak najczęściej stosowany jest napęd silnikowy, który
ma największe znaczenie techniczne. W zależności czy jest to silnik elektryczny, spalinowy,
pneumatyczny, hydrauliczny czy wiatrowy, mamy do czynienia odpowiednio z napędem
elektrycznym, spalinowym, pneumatycznym, hydraulicznym czy wiatrowym. Jednak
najważniejsze to napęd elektryczny, pneumatyczny i hydrauliczny. Występują także napędy
mieszane: elektropneumatyczne, elektrohydrauliczne i pneumohydrauliczne.
Zajmiemy się dwoma rodzajami napędów: pneumatycznym, w którym czynnikiem
przenoszącym energię jest najczęściej powietrze, oraz hydraulicznym, w którym czynnikiem
roboczym jest olej.
Układ napędowy (rys. 45) składa się z następujących czterech bloków:
1) źródła energii mechanicznej,
2) źródła ciśnienia czynnika roboczego,
3) urządzeń regulujących i sterujących,
4) odbiorników energii czynnika roboczego.
Rys. 45. Schemat blokowy układu napędowego [5, s. 18]
W zależności od rodzaju napędu poszczególne jego funkcje realizowane są przez
następujące elementy i urządzenia:
−
w napędzie pneumatycznym: silnik elektryczny, sprężarka, zawory, siłowniki
pneumatyczne;
−
w napędzie hydraulicznym: silnik elektryczny, pompa, zawory, siłowniki hydrauliczne.
Dodatkowo
na
wyposażeniu
układów
napędowych
znajdują
się
elementy
przygotowujące, przesyłające oraz magazynujące czynnik roboczy (filtry, złącza, zbiorniki,
akumulatory).
Elementy i urządzenia układów napędowych są przedstawiane na rysunkach za pomocą
umownych symboli (zgodnie z Polską Normą PN-ISO 1219-1), które w sposób bardzo
uproszczony oddają istotę ich konstrukcji.
Zawory pełnią funkcję elementów sterujących przepływem płynów. Mogą one wpływać
na ciśnienie czynnika, jego natężenie lub kierunek przepływu. Stąd podział zaworów na
sterujące:
−
ciśnieniem (zawory bezpieczeństwa, redukcyjne, przelewowe),
−
natężeniem przepływu (dławiki),
−
kierunkiem przepływu (zawory rozdzielające, zawory zwrotne).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
66
Zawory bezpieczeństwa zabezpieczają układy pneumatyczne i układy hydrauliczne
przed nadmiernym ciśnieniem przekraczającym dopuszczalne wartości.
Zawór przelewowy stosowany jest w układach hydraulicznych, w których tylko część
czynnika dopływa do odbiornika, reszta jest odprowadzana do zbiornika (lub innej gałęzi układu).
Zawór redukcyjny, będący regulatorem bezpośredniego działania, ma za zadanie
zredukować ciśnienie i utrzymywać je na stałej wartości za zaworem.
W napędach pneumatycznych możemy podzielić zawory sterujące kierunkiem
na: odcinające, zwrotne, szybkiego spustu, podwójnego sygnału, rozdzielające oraz
przełączniki obiegu.
W napędach hydraulicznych do zaworów kierujących kierunkiem przepływu zaliczamy:
odcinające, zwrotne jednokierunkowe, zwrotne logiczne ALBO, zwrotne logiczne
I, oraz rozdzielające.
Zawór odcinający ma za zadanie zamykać i otwierać dany przewód przed przepływem
czynnika roboczego.
Zawór zwrotny umożliwia przepływ czynnika roboczego tylko w ściśle określonym
kierunku.
Przełącznik obiegu w napędach pneumatycznych oraz zawór zwrotny logiczny ALBO
w napędach hydraulicznych mają podobną budowę oraz zasadę działania. Popularnie
oba te zawory są nazywane zaworami alternatywy LUB.
Zawór podwójnego sygnału (w napędach pneumatycznych) oraz zawór zwrotny logiczny
I (w napędach hydraulicznych) mają podobną budowę i zasadę działania. Realizują one
funkcję koniunkcji (mnożenia).
Zadaniem zaworu szybkiego spustu jest umożliwienie swobodnego wypływu czynnika
roboczego do atmosfery.
Zawór rozdzielający kieruje przepływem płynów do ściśle określonych odbiorników.
Podstawowymi parametrami tego zaworu jest liczba położeń, jaką może zająć element
ruchomy rozdzielacza oraz liczba dróg czyli ilość kanałów, które uzyskują różne połączenia
między sobą, w zależności od położenia rozdzielacza. Zawory te mogą być sterowane siłą
mięśni, mechanicznie, elektrycznie oraz poprzez spadek lub wzrost ciśnienia.
W napędach pneumatycznych do zaworów sterujących natężeniem przepływu zaliczamy
zawory: dławiące oraz dławiąco-zwrotne. W napędach hydraulicznych - zawory dławiące,
zwrotne z dławieniem, regulatory przepływu dwudrogowe i trójdrogowe, synchronizatory
przepływy jednokierunkowe.
Dławiki (zawory dławiące) przepuszczają strumień płynu przez celowo wykonane
przewężenie kanału, zwane oporem. Może on być stały, nastawny lub zmienny.
Zawór dławiąco-zwrotny, jak sama nazwa wskazuje, w zależności od kierunku
przepływu czynnika roboczego pracuje jako zawór dławiący lub jako zawór zwrotny.
Zasilanie układów napędowych
W układach pneumatycznych występuje otwarty obieg czynnika roboczego (najczęściej
powietrza pobieranego z atmosfery, które jest po wykonanej pracy wypuszczane do
atmosfery), a w układach hydraulicznych – zamknięty (czynnik roboczy jest pobierany ze
zbiornika i po wykonanej pracy powraca do zbiornika).
W układach pneumatycznych czynnik roboczy, w celu zapewnienia poprawnej pracy
urządzeń automatyki pneumatycznej, musi spełnić określone warunki:
−
nie może zawierać żadnych zanieczyszczeń, zarówno stałych jak i płynnych (mogą
zatykać opory, zwiększać siłę tarcia),
−
musi mieć odpowiednią wilgotność (nie może powstawać zjawisko skraplania, przy
niskiej temperaturze może powstać oblodzenie, a kryształki lodu utrudniać przepływ
czynnika, woda również sprzyja zjawisku korozji elementów),
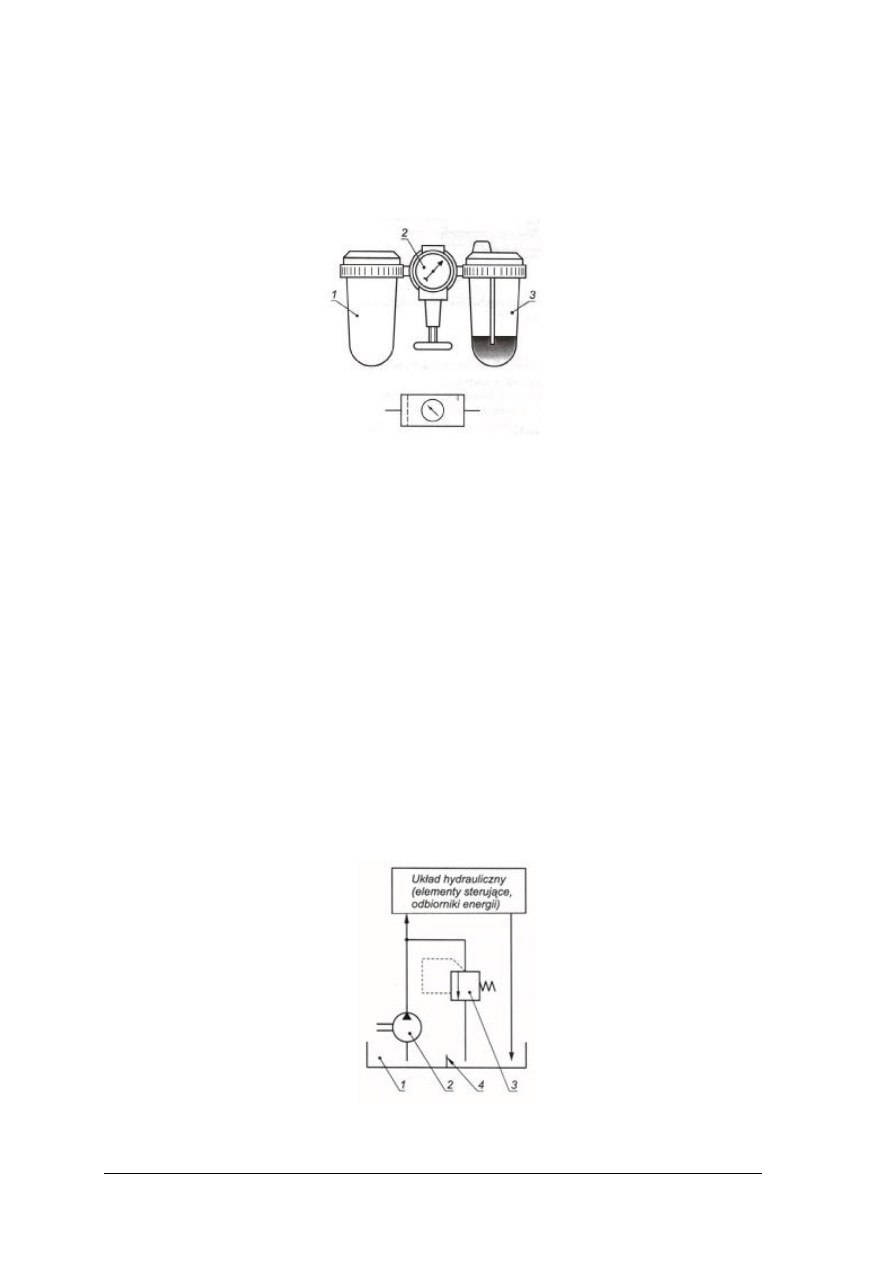
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
67
−
musi być nasycony mgłą olejową (za wyjątkiem zasilania zaworów analogowych) w celu
zmniejszenia siły tarcia występującej podczas pracy urządzeń,
−
musi mieć odpowiednie ciśnienie.
W celu uzyskania powietrza o odpowiednim ciśnieniu jest ono sprężane w sprężarce
a następnie przechodzi przez stację przygotowania powietrza (rys. 46).
Rys. 46. Podstawowy układ przygotowania sprężonego powietrza: 1 – filtr, 2 – zawór redukcyjny z manometrem,
3 – smarownica [5, s. 42]
Układ powyższy wymaga okresowego oczyszczania filtru oraz uzupełniania oleju
w smarownicy. Stosowane są stacje oczyszczania powietrza, które w sposób samoczynny
umożliwiają regenerację wkładów odwadniaczy.
W zależności od wymaganej dokładności oczyszczania powietrza stosowane są
następujące metody filtracji:
−
filtrowanie mechaniczne,
−
filtrowanie przez kondensację zanieczyszczeń,
−
filtrowanie przez absorpcję.
W układach automatyki stosowana jest metoda filtrowania przez absorpcję jako
najbardziej skuteczna. Przyjmuje się, że pozwala ona na stu procentowe usunięcie
zanieczyszczeń stałych.
W układach hydraulicznych czynnik roboczy – olej musi spełniać następujące warunki:
−
nie może zawierać zanieczyszczeń stałych, powietrza oraz wody,
−
musi mieć odpowiednią temperaturę.
Przygotowanie oleju do pracy odbywa się w zbiorniku, z którego olej jest pobierany
przez pompę oraz do którego spływa olej zanieczyszczony w układzie (rys. 47).
Rys. 47. Zasilanie układów hydraulicznych: 1 – zbiornik, 2 – pompa, 3 - zawór bezpieczeństwa, 4 – przegroda
[5, s. 47]
.
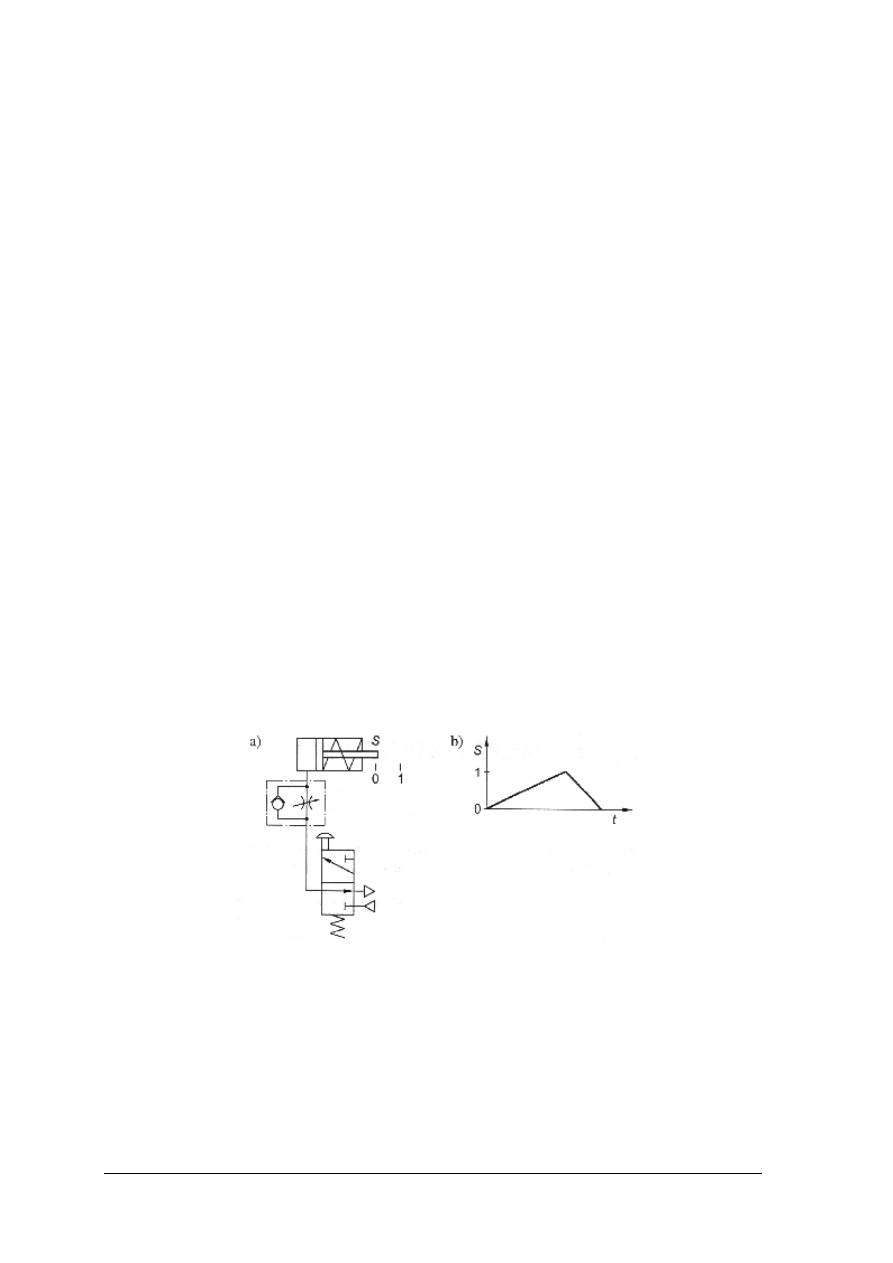
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
68
Zadaniem zbiornika jest: gromadzenie oleju, odpowietrzanie oleju, oczyszczanie oleju,
chłodzenie albo grzanie oleju. Zanieczyszczenia stałe oleju są usuwane za pomocą
odpowiednich filtrów hydraulicznych (mechanicznych lub siłowych). W zależności od
wymagań dotyczących czystości oleju w układzie, filtry są instalowane np. na wlewie do
zbiornika, na przewodzie ssawnym pompy, na przewodzie tłocznym pompy, na odgałęzieniu
przewodu tłocznego, na przewodzie powrotnym do zbiornika.
Pompy
Pompy w napędach hydraulicznych mają za zadanie zamienić energię mechaniczną
na hydrauliczną. Odwrotnością pompy jest silnik hydrauliczny. Budowa pomp jest identyczna
z budową silników hydraulicznych, jedynie inne są sygnały wejściowe i wyjściowe.
Wyróżnia się dwie fazy pracy pomp: zassanie oleju do pompy, a następnie wtłoczenie
go do instalacji. Ze względu na budowę wyróżnia się pompy zębate, łopatkowe,
wielotłoczkowe i śrubowe.
Układy sterowania pneumatycznego i hydraulicznego
Do projektowania układów sterowania stosuje się metodę analityczną lub metodę
intuicyjną. Metoda intuicyjna wymaga znajomości działania elementów przełączających. Do
zapisów cykli pracy układu służą cyklogramy i wykresy czasowe, które w sposób graficzny
przedstawiają działanie elementów układu w funkcji czasu.
W układach sterowania najczęściej oddziałuje się na prędkość ruchu tłoczyska. Zmianę
prędkości w zależności od czynnika roboczego można uzyskać:
−
w układach pneumatycznych przez dławienie przepływu powietrza lub przez stosowanie
zaworów szybkiego spustu,
−
w układach hydraulicznych przez stosowanie pomp o zmiennej wydajności, stosowanie
kilku pomp (kolejno włączanych do układu), dławienia przepływu oleju, stosowanie
regulatorów przepływu.
Na rys. 48 przedstawiono przykładową regulację prędkości tłoczyska przez dławienie
powietrza na wlocie siłownika jednostronnego działania wraz z cyklogramem pracy układu.
Rys. 48. Regulacja prędkości tłoczyska przez dławienie na wlocie: a) schemat układu, b) cyklogram pracy
układu [5, s. 56]
Dławienie na wlocie siłownika jednostronnego działania zapewnia wolne wysuwanie
tłoczyska i szybki powrót. W układzie tym siłownik jest sterowany zaworem 3/2 normalnie
zamkniętym. Po wciśnięciu przycisku i przesterowaniu zaworu, powietrze dopływa przez
dławik do komory siłownika, gdzie następuje powolne wysuwanie tłoczyska. Zwolnienie
przycisku sprężyna przesterowuje zawór. Zostaje odcięty dopływ powietrza do siłownika,
a powietrze z komory siłownika przez zawór zwrotny i rozdzielacz wypływa do atmosfery.
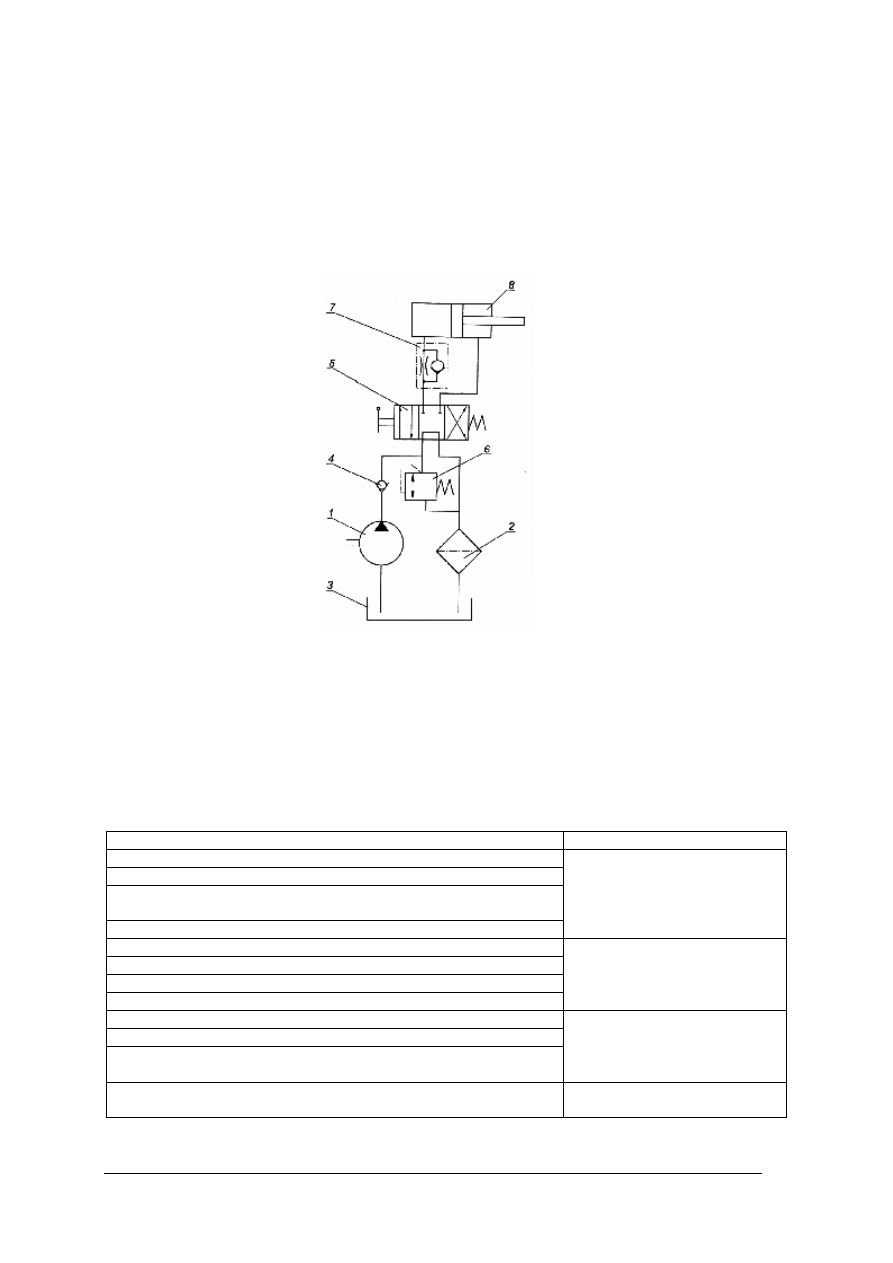
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
69
W układach hydraulicznych sterowanie jest podobne jak w układach pneumatycznych.
Przykładowo, na rys. 49 przedstawiony jest układ sterowania siłownikiem dwustronnego
działania zaworem rozdzielającym czterodrogowym trójpołożeniowym. Przedstawiony układ
pozwala na szybkie wysuwanie tłoczyska i jego powolny powrót. Zawór zwrotno-dławiący
pozwala na zmianę prędkości ruchu. Przy wysuwania tłoczyska przepływ oleju odbywa
się głównie przez zawór zwrotny, a przy wysuwaniu przez dławik Zainstalowany zawór
bezpieczeństwa zabezpiecza układ przed przeciążeniem (nadmiernym ciśnieniem oleju),
a zawór zwrotny zabezpiecza przed cofaniem się oleju do kanału tłocznego pompy.
Rys. 49. Schemat sterowania hydraulicznego siłownikiem dwustronnego działania: 1 – pompa, 2 – filtr,
3 – zbiornik, 4 – zawór zwrotny, 5 – rozdzielacz 4/3, 6 – zawór bezpieczeństwa, 7 – zawór zwrotny
z dławieniem, 8 – siłownik [5, s. 61]
Przystępując do projektowania układu sterowania, w zależności od warunków pracy
układu, należy wybrać rodzaj napędu jaki się zastosuje - pneumatyczny czy hydrauliczny.
W tabelach 4 i 5 zestawiono najważniejsze cechy obu układów, które mogą być pomocne
w fazie projektowania odpowiedniego układu sterowania.
Tabela. 4. Cechy układów pneumatycznych [5, s. 82]
Zalety
Wady
ogólnodostępny czynnik roboczy
otwarty obieg powietrza (nie trzeba przewodów powrotnych)
ze względu na ściśliwość powietrza układy charakteryzują się dużą
amortyzacją
odporność na przeciążenia
ograniczona odległość
przesłania sygnału
możliwość magazynowania energii
niezawodność działania
prosta konstrukcja
odporność na zapalenie
mniejsza szybkość przesyłania
sygnału w porównaniu z innymi
napędami
czystość czynnika roboczego
łatwość wykrywania uszkodzeń
odprowadzanie przez czynnik roboczy ciepła wytworzonego na skutek
strat energetycznych
konieczność odpowiedniego
przygotowania sprężonego
powietrza
większe prędkości ruchu niż w układzie hydraulicznym
ściśliwość czynnika roboczego –
nierównomierny ruch

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
70
Tabela. 5. Cechy układów hydraulicznych [5, s. 83]
Zalety
Wady
możliwość uzyskiwania dużych sił roboczych przy
stosunkowo małych rozmiarach elementów
zamknięty układ: w porównaniu z napędem
pneumatycznym, dwukrotnie dłuższe przewody
łatwe zabezpieczenie przed przeciążeniem
zapowietrzenie układu powoduje niespokojną pracę
urządzeń
łatwa obsługa
prosta, tania konstrukcja
przecieki oleju powodują mniejszą pewność działania
samosmarowność
wpływ temperatury na lepkość oleju (zmiany w pracy
układu)
ze względu na małą ściśliwość cieczy korzystny do
stosowania w układach kopiujących
zagrożenie pożarowe
Elektropneumatyczne i elektrohydrauliczne układy sterowania
Elektropneumatyczne i elektrohydrauliczne układy sterowania występują w maszynach
i urządzeniach, odpowiednio z napędami pneumatycznymi lub hydraulicznymi i sterowaniem
elektrycznym. Elektryczne elementy sterujące np. przekaźniki przetwarzają elektryczne
sygnały wejściowe z elementów sygnałowych (przełączniki, sensory, przyciski) na sygnały
oddziaływujące na uruchamiane elektromagnetycznie pneumatyczne (hydrauliczne) zawory
rozdzielające, które sterują siłownikami i silnikami pneumatycznymi (hydraulicznymi).
Zawory te umożliwiają współpracę elektrycznej części sterującej z pneumatyczną
(hydrauliczną) częścią energetyczną.
Dzięki technice zaworów proporcjonalnych możliwe jest sterowanie urządzeniami
pneumatycznymi lub hydraulicznymi małymi prądami, rzędu miliamperów. Zawory
proporcjonalne
są
sterowane
elektronicznie.
Dla
wysterowania
ich
magnesów
proporcjonalnych prąd wejściowy zmienia się w zakresie od -20 mA do +20 mA.
4.11.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie bloki podstawowe wchodzą w skład układu napędowego?
2. Na co mogą wpływać zawory jako elementy sterujące przepływem czynnika roboczego?
3. Jaką rolę spełniają zawory bezpieczeństwa?
4. Jaką rolę pełni zawór szybkiego spustu?
5. Jakie warunki powinien spełniać czynnik roboczy w układach pneumatycznych?
6. Jakie warunki powinien spełniać olej w układach hydraulicznych?
7. W jaki sposób można uzyskać zmianę prędkości ruchu tłoczyska w układach
pneumatycznych?
8. W jaki sposób można otrzymać zmianę prędkości ruchu tłoczyska w układach
hydraulicznych?
9. Jakie najważniejsze zalety i wady posiadają układy pneumatyczne, a jakie hydrauliczne?
10. Gdzie występują elektropneumatyczne układy sterowania?
4.11.3. Ćwiczenia
Ćwiczenie 1
Korzystając z Polskiej Normy PN–ISO 1219–1 odszukaj symbole graficzne wskazanych
przez nauczyciela elementów i urządzeń hydraulicznych i pneumatycznych, np.: źródło
energii pneumatycznej, źródło energii hydraulicznej, droga wylotowa powietrza, pompa
hydrauliczna, siłownik pneumatyczny dwustronnego działania, zawór szybkiego spustu itp.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
71
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z Polska Normą,
2) zapoznać się z listą symboli podaną przez nauczyciela,
3) odszukać i przerysować wskazane symbole graficzne elementów i urządzeń,
4) zaprezentować wynik swojej pracy,
5) ocenić ćwiczenie.
Wyposażenie stanowiska pracy:
−
wykaz symboli,
−
Polska Norma PN–ISO 1219-1,
−
przybory do rysowania i pisania,
−
literatura z rozdziału 6.
Ćwiczenie 2
Zaprojektuj układ sterowania siłownikiem jednostronnego działania dla zadanego
cyklogramu.
Rysunek do ćwiczenia 2. Cyklogram pracy układu [5, s. 56]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem dotyczącym układów sterowania pneumatycznego,
2) zorganizować stanowisko pracy,
3) zapoznać się z treścią zadania,
4) podać na podstawie cyklogramu zasadę działania układu,
5) zaprojektować układ sterowania,
6) zaprezentować wynik swojej pracy,
7) ocenić ćwiczenie.
Wyposażenie stanowiska pracy:
−
papier,
−
przybory do rysowania i pisania,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
72
4.11.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) narysować symbol graficzny siłownika pneumatycznego dwustronnego
działania?
¨
¨
2) odszukać symbol graficzny wskazanego elementu lub urządzenia
pneumatycznego i hydraulicznego?
¨
¨
3) wyjaśnić zasadę działania układu sterowania na podstawie cyklogramu?
¨
¨
4) zaprojektować układ sterowania siłownika na podstawie cyklogramu pracy
układu?
¨
¨

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
73
4.12. Układy zasilania, sterowania i zabezpieczania
4.12.1. Materiał nauczania
W układach automatyki przemysłowej stosuje się dużą grupę urządzeń tworzących
układy sygnalizacji, blokad i zabezpieczeń. Funkcją układów sygnalizacji jest zwrócenie
uwagi operatora procesu przemysłowego na zaistnienie zdarzenia, które są ważne dla
bezpieczeństwa ludzi, trwałości instalacji, jakości produkcji itp. Układy sygnalizacji możemy
podzielić na: sygnalizację kontrolno-wskaźnikową, ostrzegawczą i awaryjną. Informacja
o zaistniałym zdarzeniu powinna niezwłocznie być przekazana do operatora w postaci
sygnału świetlnego i/lub dźwiękowego. Dla ułatwienia odbioru sygnałów świetlnych jest
przyjęty sposób organizacji „na ciemno” (sygnał świetny wyłączony – bieg prawidłowy) lub
„jasno” (gdy sygnał świetlny znika – należy interweniować).
Montowanie blokad automatycznych ma na celu uniemożliwienie środkami technicznymi
użycie aparatu w warunkach niezgodnych z jego przeznaczeniem, a zagrażającym samemu
aparatowi, otoczeniu jak i bezpieczeństwu użytkownika.
Zabezpieczenia automatyczne mają za zadanie chronić instalację lub otoczenie
przed szkodliwymi warunkami eksploatacji zabezpieczanego aparatu. Najczęściej polega
to na wymuszeniu stanu uznanego za bezpieczny bez możliwości samoczynnego wyjścia
z tego stanu po zaniknięciu zagrożenia (zabezpieczenia przeciwzwarciowe i termiczne).
Łączniki mechanizmowe stosowane w górnictwie
Łączniki elektryczne są jednym z podstawowych elementów sieci elektroenergetycznej.
Służą do przewodzenia prądów roboczych i zakłóceniowych oraz do dokonywania czynności
łączeniowych w obwodach elektrycznych. W łącznikach zestykowych przewodzenie prądu
następuje w wyniku zetknięcia się dwóch styków. W łącznikach bezstykowych
(półprzewodnikowych) stan zamknięcia zachodzi w wyniku zmian wewnętrznej rezystancji
elementu półprzewodnikowego od wartości blokowania do wartości przewodzenia.
W kopalniach łączniki bezstykowe są stosowane w układach automatyki oraz sterowania
i regulacji prędkości obrotowej napędów elektrycznych.
Najczęściej stosowane są łączniki stycznikowe. Ze względu na przeznaczenie i zdolności
łączenia rozróżnia się łączniki:
−
odłączniki,
−
rozłączniki,
−
wyłączniki,
−
bezpieczniki.
Odłączniki pełnią rolę łączników izolacyjnych, tzn. stwarzają w stanie otwarcia
we wszystkich
swoich
biegunach
bezpieczne przerwy
izolacyjne oraz niekiedy
wykorzystywane są do zamykania i otwierania obwodów w stanie bezprądowym lub przy
prądach o niewielkim obciążeniu.
Rozłączniki (łączniki robocze) zamykają i otwierają obwody w warunkach roboczych,
w których obciążenie nie przekracza dziesięciokrotnej wartości prądu znamionowego
łącznika.
Wyłączniki służą do załączania i wyłączania obwodów, w których płyną określone prądy
robocze i zwarciowe.
Styczniki to niskonapięciowe rozłączniki manewrowe. Służą one do lokalnego
i zdalnego, automatycznego, częstego otwierania i zamykania obwodów elektrycznych
w warunkach roboczych (np. do sterowania pracą napędów elektroenergetycznych).
Najczęściej są to styczniki elektromagnesowe umożliwiające dużą częstotliwość przełączeń.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
74
Sieci niskiego napięcia wymagają zabezpieczeń przed przeciążeniami i skutkami zwarć.
Urządzenia zabezpieczające
mogą
jednocześnie zabezpieczać przed prądami
przeciążeniowymi i zwarciowymi, lub zabezpieczać tylko przed jednym z wymienionych
prądów.
Zasady odnośnie co do zabezpieczenia sieci podziemnych wynikają również z przepisów
górniczych.
Sterowanie energoelektroniczne
Ze względu na krótkie odcinki prostoliniowe, duże krzywizny i konieczność
manewrowania w transporcie podziemnym, co wymaga częstych rozruchów i regulacji
prędkości obrotowej silników, aż 35% energii pobieranej przez lokomotywę kopalnianą jest
tracone
w
konwencjonalnych
układach
sterowania.
Sterowanie
tyrystorowe
(energoelektroniczne) znacznie ograniczyło straty regulacyjne, co jest istotne w przypadku
lokomotyw
akumulatorowych.
Wprowadzenie
sterowania
energoelektronicznego
zracjonalizowało transport kołowy, poprawiło warunki bezpieczeństwa oraz umożliwiło
automatyzację ruchu lokomotyw.
4.12.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka funkcję pełnią układy sygnalizacji?
2. Czym różni się sposób organizacji odbioru sygnałów świetlnych „na ciemno” od sposobu
„na jasno”?
3. Jaki jest cel stosowania zabezpieczeń automatycznych?
4. W jaki sposób informacja o zaistniałym zdarzeniu jest sygnalizowana operatorowi
procesu?
5. Jak klasyfikujemy systemy alarmowe ze względu na zagrożenia?
6. Jaka jest różnica pomiędzy wyłącznikami a odłącznikami?
7. Do czego służą styczniki niskonapięciowe?
8. Jakie zalety posiada sterowanie energoelektroniczne układów napędowych stosowane
w transporcie podziemnym?
4.12.3. Ćwiczenia
Ćwiczenie 1
Określ przeznaczenie, zdolności łączeniowe, parametry i zakres zastosowań wybranych
łączników na podstawie dokumentacji technicznej.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zapoznać się z przygotowaną dokumentacją techniczną łączników,
3) wypisać dane techniczne,
4) rozróżnić rodzaj łącznika,
5) określić przeznaczenie łącznika,
6) zaprezentować wykonane ćwiczenie,
7) dokonać oceny poprawności wykonanego ćwiczenia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
75
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna łączników,
−
karty katalogowe,
−
komputer z dostępem do Internetu,
−
zeszyt,
−
literatura wskazana przez nauczyciela.
4.12.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) określić na podstawie dokumentacji parametry łączników?
¨
¨
2) określić do czego zastosowano łączniki bezstykowe w kopalniach?
¨
¨
3) wskazać zastosowanie odłącznika?
¨
¨
4) wyjaśnić zadania stycznika w układach sterowniczych maszyn górniczych?
¨
¨

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
76
4.13. Układy automatyki w górnictwie podziemnym
4.13.1. Materiał nauczania
Układy automatyki stosowane w górnictwie podziemnym zostaną przedstawione
na przykładzie układu automatyzacji przenośników typu USPP oraz automatyzacji stacji
załadowczej.
Układy automatyzacji przenośników
Do odstawy urobku w oddziale wydobywczym stosuje się kilka lub kilkanaście
przenośników (taśmociągów) ułożonych szeregowo. W zależności od rodzaju przenośników
stosuje się różne układy ich elektrycznego zasilania i automatyzacji. Automatyzacja
przenośników polega głównie na centralnym i zdalnym sterowaniu napędów z równoczesną
kontrolą ich pracy i sygnalizacji. Podstawowym elementem w układach automatyzacji ciągu
przenośników są czujniki spiętrzenia urobku i prędkości taśm, które umożliwiają kolejne
uruchomianie przenośników, ich samoczynną blokadę, kontrolę ułożenia taśm.
Układy automatyzacji przenośników wykonane są w trzech odmianach:
1) układ sterowania pojedynczego przenośnika,
2) układ do sterowania prostego ciągu do 10 przenośników taśmowych,
3) układ do sterowania rozgałęzionego do 18 przenośników w czterech trasach.
W skład układu automatyzacji pojedynczego przenośnika wchodzą następujące bloki
funkcjonalne:
−
zespół centralnego sterowania,
−
zespół lokalnego sterowania, zawierający moduł wzmacniaczy czujników, moduł
sterowania i przełączniki rodzaju pracy,
−
zasilacz iskrobezpieczny,
−
czujniki pomiarowe (spiętrzenia urobku, prędkości taśmy, temperatury i napędu),
−
system łączności głośnomówiącej,
−
wyłączniki awaryjne,
−
skrzynki rozgałęźne,
−
zespół transformatorowy,
−
kopalniane łączniki stycznikowe.
Układ ten umożliwia centralne uruchamianie ciągu przenośników i trzy rodzaje
sterowania (centralne, indywidualne i indywidualne z blokadą) dla transportu urobku
i przewozu ludzi, sygnalizację na 5 sekund przed uruchomieniem przenośnika, współpracę
z systemem łączności głośnomówiącej, awaryjne wyłączenie przenośnika z dowolnego
miejsca przebiegu trasy oraz ponowne uruchomienie, kontrolę prawidłowości pracy
przenośnika i wyłączenie w przypadku zakłóceń.
Automatyzacja stacji załadowczej
Urządzenie do automatyzacji punku załadowczego taśmociąg – wozy (rys. 50) stosowane
jest w oddziałach o dużej koncentracji wydobycia. Zapewnia ono ładowanie urobku
w systemie ciągłym, samoczynne sterowanie popychakiem wozów oraz kontrolę pracy
urządzeń elektrycznych i mechanicznych podziemnego punku załadowczego. Po włączeniu
napięcia urządzenie dokonuje kontroli obecności wózków pod wsypem, jeżeli są to układ
uruchamia popychak w celu podstawienia pierwszego wozu pod zsypnię. Dopiero wtedy
następuje uruchomienie przenośników podających. Po napęłnienie pierwszej części wozu
czujnik zapełnienia uruchamia popychak. Umożliwia to przesuw wózka i zapełnienie kolejnej
części. Cykl pracy trwa do zapełnienia całego wozu. Popychak podstawia pod zsypnię
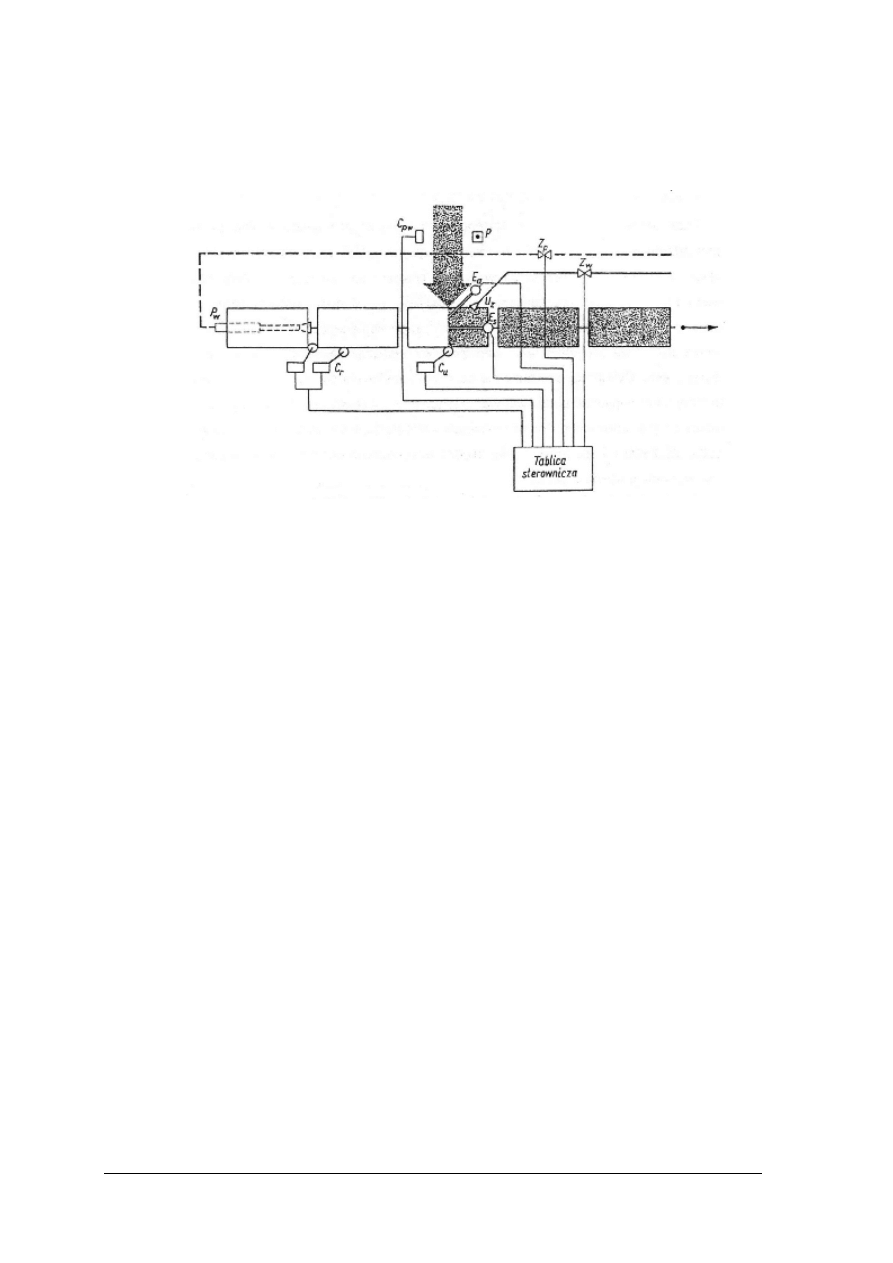
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
77
następny wóz. Gdy ostatni zostanie napełniony, to czujnik rezerwy wozu unieruchamia napęd
przenośnika taśmowego. W przypadku jakiegokolwiek zakłócenia zawsze nastąpi
zatrzymanie przenośnika. Gdy przenośnik znajduje się w ruchu a urobek na przenośniku
podającym to równocześnie przebiega zraszanie wysypu.
Rys. 50. Schemat poglądowy automatyzacji punku załadowczego; P – źródło promieniowania, Cpw – czujnik
przepływu strugi węgla, Cr – czujnik rezerwy wozów, Cu – czujnik ustawienia wozów, Ea – elektroda
awaryjna, Es – elektroda sterownicza, Zp – zawór powietrzny (ew. hydrauliczny), Zw – zawór wodny,
Uz – urządzenie zraszające, Pw – popychak wozów [7, s. 501]
4.13.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Z jakich bloków funkcjonalnych składa się układ automatyzacji przenośników?
2. Jakie czujniki zastosowano w zautomatyzowanym punkcie załadowczym?
3. W jaki sposób odbywa się załadunek wozów urobkiem?
4. Jakiego rodzaju sterowania umożliwia układ USPP?
4.13.3. Ćwiczenia
Ćwiczenie 1
Na podstawie danych schematów układów sterowania i regulacji stosowanych
w górnictwie
podziemnym
określ
sposób
działania
układów,
wyjaśnij
zadania
poszczególnych aparatów, urządzeń i czujników.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zapoznać się z przygotowanymi schematami układów,
3) przeanalizować sposób działania układów,
4) określić funkcje poszczególnych urządzeń i elementów,
5) zaprezentować wykonane ćwiczenie,
6) dokonać oceny poprawności wykonanego ćwiczenia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
78
Wyposażenie stanowiska pracy:
−
schematy wybranych układów sterowania i regulacji stosowanych w górnictwie,
−
zeszyt,
−
literatura wskazana przez nauczyciela.
4.13.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) czytać schematy poglądowe układów sterowania i automatyzacji?
¨
¨
2) określić sposób działania układów na podstawie schematów poglądowych?
¨
¨
3) określić
zadania
poszczególnych
bloków
funkcjonalnych
układu
automatyzacji przenośnika?
¨
¨
4) wyjaśnić w jaki sposób uruchamiane jest urządzenie zraszające wysyp?
¨
¨
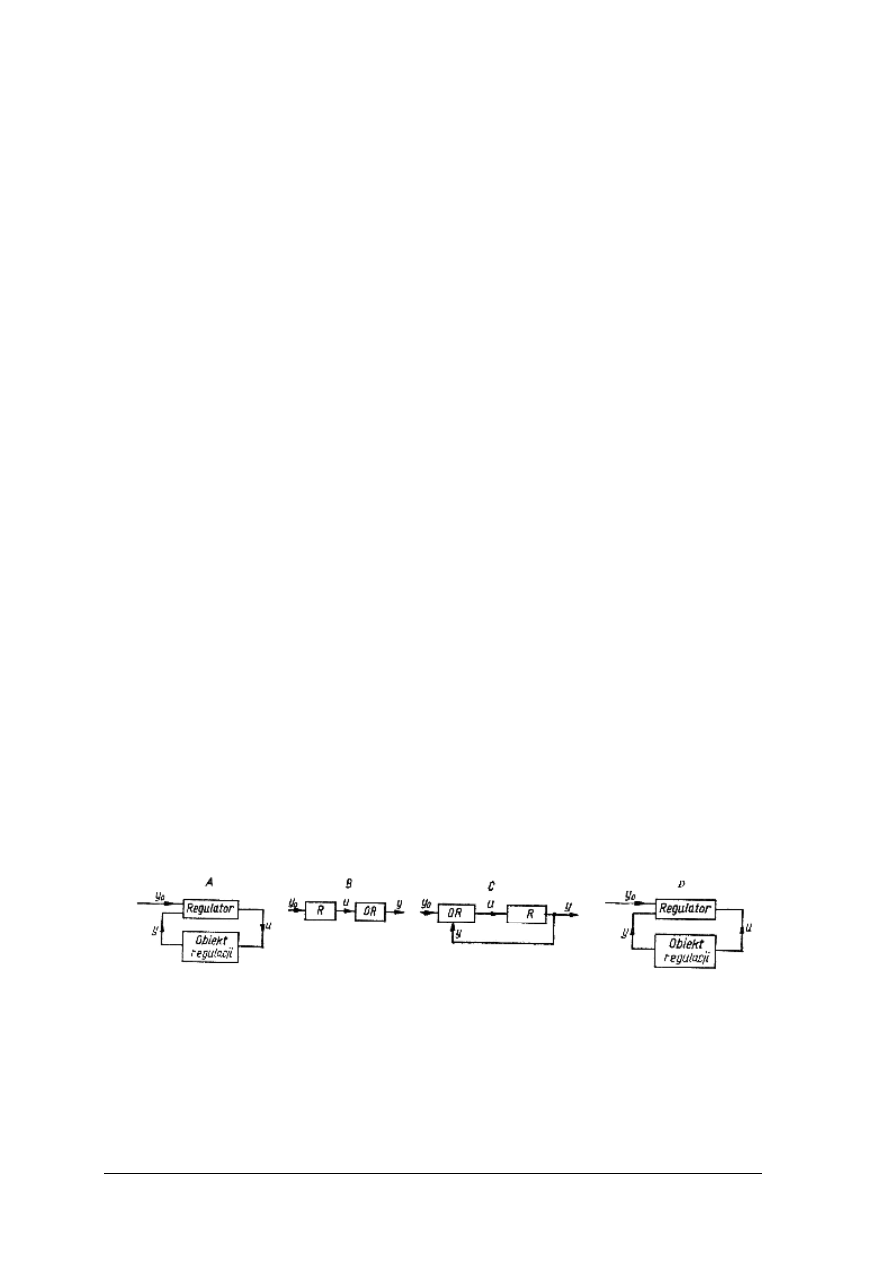
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
79
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję zanim zaczniesz rozwiązywać zadania.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem pytań testowych.
4. Test zawiera 20 zadań o różnym stopniu trudności, dotyczących analizowania układów
elektrycznych i automatyki przemysłowej. Zadania zawierają cztery odpowiedzi,
z których tylko jedna jest poprawna.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. Jeśli uznasz, że pomyliłeś się i wybrałeś nieprawidłową odpowiedź,
to zaznacz ją kółkiem, a następnie ponownie zaznacz znakiem X odpowiedź prawidłową.
6. Pracuj samodzielnie, bo tylko wtedy będziesz mógł sprawdzić poziom swojej wiedzy.
7. Kiedy wybór odpowiedzi lub jej udzielenie w analizowanym zadaniu będzie Ci sprawiało
trudność, wtedy odłóż jego rozwiązanie na później i wróć do niego, gdy zostanie Ci czas
wolny.
8. Na rozwiązanie testu masz 30 minut.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1. Łącznik służący do stwarzania w stanie otwarcia we wszystkich swoich biegunach
bezpiecznych przerw izolacyjnych, to
a) bezpiecznik.
b) rozłącznik.
c) wyłącznik
d) odłącznik.
2. Gałąź obwodu elektrycznego tworzą elementy połączone
a) szeregowo.
b) równolegle.
c) w sposób mieszany.
d) w gwiazdę.
3. Układ regulacji automatycznej przedstawia schemat
4. Rezystory o rezystancji R1 = 10 k
Ω
, R2 = 4,7 k
Ω
, R3 = 30
Ω
, połączono szeregowo;
rezystancja zastępcza układu wynosi
a) R
1
= 15,03 k
Ω
.
b) R
1
= 0,24 k
Ω
.
c) R
1
= 1 k
Ω
.
d) R
1
= 15,30 k
Ω
.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
80
5. Do elementów automatyki nie zalicza się
a) przekaźnika.
b) silnika.
c) zaworu.
d) stacyjki komputerowej.
6. Standardowym sygnałem elektrycznym nie jest sygnał
a) 0...5 mA.
b) 20...100 mA.
c) 0...20 mA.
d) 4...20 mA.
7. Elementem pasywnym obwodu elektrycznego jest
a) generator termoelektryczny.
b) rezystor.
c) ogniwo chemiczne.
d) akumulator.
8. Do urządzeń automatyki zalicza się
a) wzmacniacz.
b) prądnicę.
c) regulator.
d) siłownik.
9. Zadanie sterowania realizowane przez termostat to
a) optymalizacja przy zmiennych warunkach zewnętrznych.
b) śledzenie i wykonanie programu.
c) utrzymywanie punktu pracy zapewniającego maksimum wartości temperatury.
d) utrzymanie stałej wartości temperatury.
10. Dwa rezystory o rezystancji R = 10 k
Ω
, połączono równolegle, rezystancja zastępcza
układu wynosi
a) 20 k
Ω
.
b) 50 k
Ω
.
c) 200
Ω
.
d) 5 k
Ω
.
11. Stosunkowo duże siły i moce siłowników są charakterystyczne dla urządzeń
a) hydraulicznych.
b) pneumatycznych.
c) elektrycznych.
d) elektropneumatycznych.
12. Rysunek przedstawia symbol
a) woltomierza.
b) rezystora.
c) termistora.
d) amperomierza.
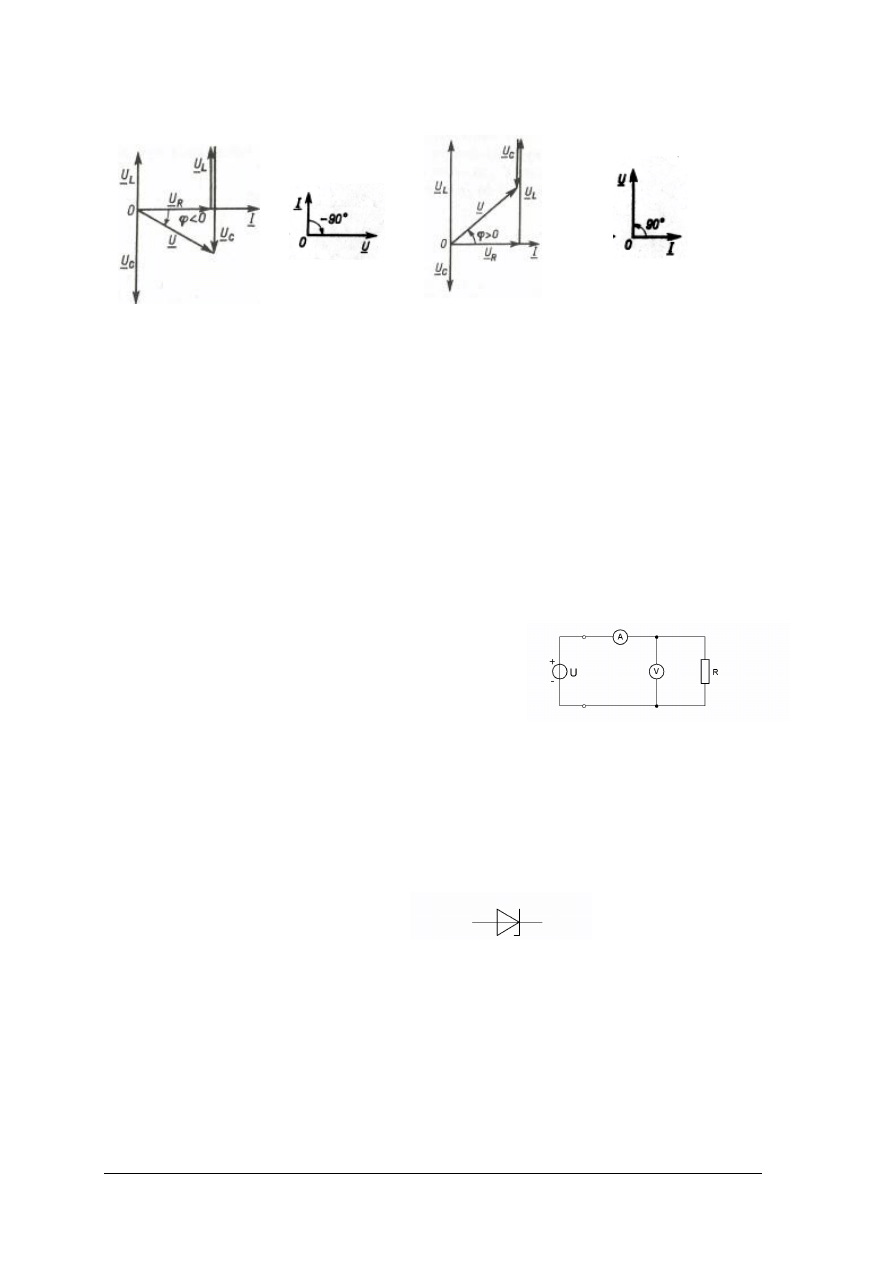
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
81
13. Wartości skuteczne prądu i napięcia cewki przedstawia wykres wektorowy
a)
b)
c)
d)
14. Zastosowanie nastawnika w siłowniach membranowych i pneumatycznych
a) zmniejsza szybkość działania siłownika.
b) zmniejsza zakres ciśnienia.
c) umożliwia usunięcie z siłownika sprężyny.
d) zwiększa histerezę.
15. Wyłączniki krańcowe stanowią dodatkowe wyposażenie siłowników
a) pneumatycznych tłokowych.
b) hydraulicznych korbowych.
c) pneumatycznych membranowych.
d) elektrycznych.
16. Rysunek przedstawia układ do pomiaru
a) małych rezystancji metodą techniczną.
b) dużych rezystancji metodą techniczną.
c) rezystancji metodą porównawczą.
d) rezystancji metodą bezpośrednią.
17. Siła elektromotoryczna źródła E = 1,5 V, a jego rezystancja wewnętrzna R
w
= 0,24
Ω
.
Moc pobierana przez odbiornik w stanie dopasowania do źródła wynosi
a) 0,27 W.
b) 5 W.
c) 1,5 W.
d) 2,34 W.
18. Rysunek przedstawia symbol
a) diody prostowniczej.
b) triaka.
c) diody stabilizacyjnej.
d) diody LED.
19. Przetwornik pomiarowy przetwarza wielkość
a) zadaną.
b) regulowaną na sygnał napięciowy.
c) zadaną na sygnał prądowy.
d) regulowaną na sygnał dogodny do wprowadzenia do regulatora.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
82
20. Sygnałem pneumatycznym standardowym jest sygnał o wartości z zakresu
a) 0...50 kPa.
b) 0...100 kPa.
c) 10...100 kPa.
d) 20..100 kPa.
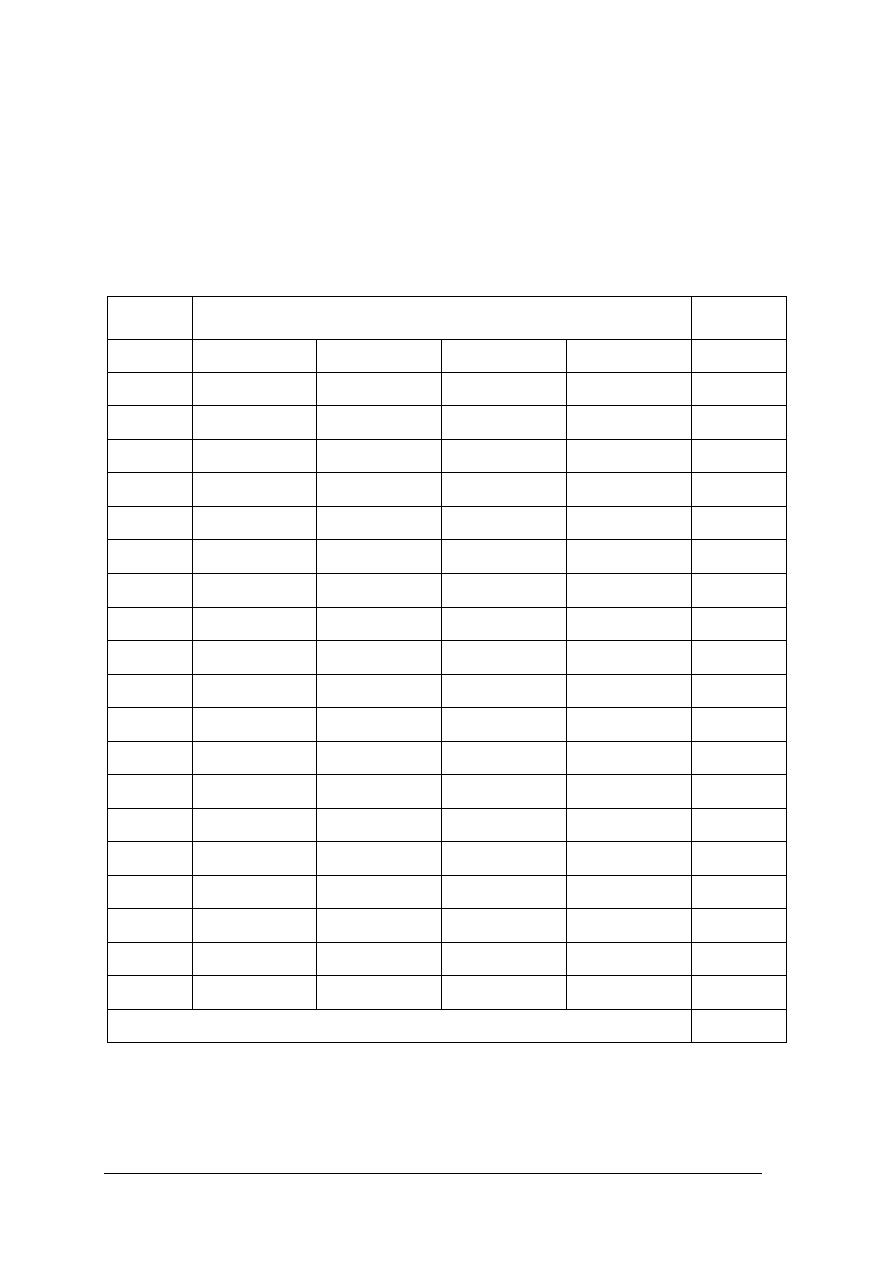
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
83
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………………………………
Analizowanie układów elektrycznych i automatyki przemysłowej
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
84
6. LITERATURA
1. Bastion P., Schuberth G., Spielvogel O., Steil H., Koty K., Ziegler K.: Praktyczna
elektrotechnika. REA, Warszawa 2003
2. Bolkowski S.: Elektrotechnika. WSiP, Warszawa 1995
3. Findeisen Wł. (red.): Poradnik inżyniera automatyka. WNT, Warszawa 1973
4. Jabłoński W., Płoszajski G.: Elektrotechnika z automatyką. WSiP, Warszawa 1996
5. Kordowicz-Sot A.: Automatyka i robotyka. Napęd i sterowanie hydrauliczne
i pneumatyczne. WSiP, Warszawa 1999
6. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1997
7. Krasucki F.: Elektryfikacja podziemnych zakładów górniczych. Wydawnictwo
Politechniki Śląkiej, Gliwice 1998
8. Michel K., Sapiński T.: Czytam rysunek elektryczny. WSiP, Warszawa 1999
9. Pióro B., Pióro M.: Podstawy elektroniki. WSiP, Warszawa, 1996
10. Płoszajski G.: Automatyka. WSiP, Warszawa 1995
11. Schmid D. (red): Mechatronika. REA, Warszawa 2002
12. Siemieniako Fr., Gawrysiak M.: Automatyka i robotyka. WSiP, Warszawa 1996
13. Polskie Normy
14. www.elfa.se
15. www.zeg.pl
Wyszukiwarka
Podobne podstrony:
Lab 03 Analiza obwodu elektrycz Nieznany
06 Analizowanie ukladow elektry Nieznany (2)
Analizowanie obwodow elektryczn Nieznany
06 Analizowanie obwodow elektry Nieznany (2)
analiza obwodow elektrycznych i Nieznany
Lab 03 Analiza obwodu elektrycz Nieznany
analiza notatki 3 id 559208 Nieznany (2)
Lab5 Analiza sygnalu mowy Lab5 Nieznany
analiza ilosciowa 6 id 60541 Nieznany (2)
MK7 Rozlozenie lusterka elektry Nieznany
dodatkowe1 analiza 11 12 2 sem Nieznany
4 Analiza progu rentownosci id Nieznany (2)
Analiza finansowa wskazniki cd Nieznany (2)
dodatkowe8 analiza 2011 12 id 1 Nieznany
analiza zwiazkow organiczna id Nieznany (2)
Analiza struktury id 61534 Nieznany (2)
więcej podobnych podstron