31
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
I.
Układ nieinercjalny a zasady dynamiki Newtona
Nienercjalny układ odniesienia to taki układ, który wzgl
ę
dem dowolnego inercjalnego układu
odniesienia porusza si
ę
z przyspieszeniem
0
a
≠
r
.
Zasady dynamiki Newtona, uwzgl
ę
dniaj
ą
ce wszystkie dotychczas przez nas rozpatrywane siły
działaj
ą
ce na ciało (tj. siły, dla których mo
ż
na wskaza
ć
ich
ź
ródło), nie s
ą
spełnione w układach
nieinercjalnych.
Obserwator znajduj
ą
cy si
ę
w układzie nieinercjalnym odczuwa działanie dodatkowej siły, dla której
nie mo
ż
na wskaza
ć
ź
ródła, tj. tak zwanej siły bezwładno
ś
ci.
Siła bezwładno
ś
ci nigdy nie wyst
ę
puje w inercjalnym układzie odniesienia.
►
Przykład 5.1: Na człowieka stoj
ą
cego wewn
ą
trz autobusu znajduj
ą
cego na przystanku działaj
ą
dwie siły: siła ci
ęż
ko
ś
ci,
c
F
r
i siła spr
ęż
ysto
ś
ci (reakcji) podło
ż
a,
R
r
. Gdy autobus rusza z
przystanku z przyspieszeniem
a
r
, człowiek zaczyna odczuwa
ć
działanie jakiej
ś
siły, która spycha
go (przechyla) w stron
ę
tyłu pojazdu, nie mo
ż
e jednak wskaza
ć
ciała b
ę
d
ą
cego
ź
ródłem tej siły.
Podobnie, podczas hamowania autobusu, człowiek odczuwa działanie jakiej
ś
siły, która tym
razem spycha go (przechyla) do przodu autobusu. T
ą
sił
ą
, której
ź
ródła nie mo
ż
na wskaza
ć
, a
która działa tylko w układzie nieinercjalnym, jest wła
ś
nie siła bezwładno
ś
ci. Dlaczego człowiek
odczuwa t
ę
sił
ę
? Poniewa
ż
spoczywa wewn
ą
trz nieinercjalnego układu odniesienia (stoi w
autobusie, który wzgl
ę
dem Ziemi porusza si
ę
z przyspieszeniem
a
r
).
►
Przykład 5.2: Na człowieka stoj
ą
cego w windzie poruszaj
ą
cej si
ę
ze stał
ą
pr
ę
dko
ś
ci
ą
wzgl
ę
dem powierzchni Ziemi, działaj
ą
dwie siły: siła ci
ęż
ko
ś
ci,
c
F
r
i siła spr
ęż
ysto
ś
ci (reakcji)
podło
ż
a,
R
r
. Gdy winda zaczyna przyspiesza
ć
z przyspieszeniem
a
r
, człowiek zaczyna odczuwa
ć
dodatkow
ą
sił
ę
. Je
ś
li wektor przyspieszenia
a
r
kabiny windy jest zwrócony w gór
ę
(jest to albo
przypadek, gdy winda przyspiesza podczas jazdy w gór
ę
, albo przypadek, gdy winda hamuje
podczas jazdy w dół), człowiek odczuwa efekt wciskania w podłog
ę
windy. Natomiast, je
ś
li wektor
przyspieszenia
a
r
kabiny windy jest zwrócony w dół (jest to albo przypadek, gdy winda hamuje
jad
ą
c w gór
ę
, albo przypadek, gdy winda przyspiesza jad
ą
c w dół), człowiek odczuwa efekt
odrywania od podłogi windy.
Zasady dynamiki Newtona, uwzgl
ę
dniaj
ą
ce wszystkie siły działaj
ą
ce na ciało (tj. siły, dla których
mo
ż
na wskaza
ć
ich
ź
ródło) oraz sił
ę
bez
ź
ródłow
ą
, zwan
ą
sił
ą
bezwładno
ś
ci s
ą
spełnione w
układach nieinercjalnych.
Blok 5:
Układy nieinercjalne.
Siły bezwładno
ś
ci
32
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
Siła bezwładno
ś
ci,
b
F
r
działaj
ą
ca na ka
ż
dy element (ciało) zwi
ą
zane z nieinercjalnym układem
odniesienia wi
ąż
e si
ę
ś
ci
ś
le z przyspieszeniem
a
r
tego układu nieinercjalnego wzgl
ę
dem innego,
inercjalnego układu odniesienia:
m
a
F
b
⋅
−
=
r
r
(uwaga: minus jest tutaj bardzo istotny!).
Z zale
ż
no
ś
ci tej wynika,
ż
e siła bezwładno
ś
ci ma zawsze taki sam kierunek jak przyspieszenie
nieinercjalnego układu odniesienia, natomiast przeciwny zwrot.
Mo
ż
na powiedzie
ć
,
ż
e siła ta działa tak, jakby „chciała”, by elementy układu pozostały w takim
stanie, w jakim były wcze
ś
niej, a nie pod
ąż
ały za przyspieszaj
ą
cym lub hamuj
ą
cym,
nieinercjalnym układem odniesienia (taki jest sens znaku minus w powy
ż
szym wzorze
wektorowym). Dlatego siła ta została nazwana sił
ą
bezwładno
ś
ci.
Pami
ę
taj,
ż
e warto
ść
siły bezwładno
ś
ci jest równa:
m
a
|
F
|
b
⋅
=
r
(tutaj minusa ju
ż
nie ma!).
II.
Siła od
ś
rodkowa
W przypadku, gdy ciało porusza si
ę
po okr
ę
gu, (czyli znajduje si
ę
w nieinercjalnym układzie
odniesienia poruszaj
ą
cym si
ę
po okr
ę
gu lub obracaj
ą
cym si
ę
), przyspieszeniem, które wyst
ę
puje
we wzorze na sił
ę
bezwładno
ś
ci jest przyspieszenie do
ś
rodkowe. Siła ta, jak ka
ż
da siła
bezwładno
ś
ci ma zwrot przeciwny do przyspieszenia układu, czyli zwrócona jest wzdłu
ż
promienia
okr
ę
gu od
ś
rodka na zewn
ą
trz, otrzymała ona specjaln
ą
nazw
ę
: siły od
ś
rodkowej.
Krótko mówi
ą
c: w ruchu jednostajnym po okr
ę
gu sił
ą
bezwładno
ś
ci jest siła od
ś
rodkowa.
Siła od
ś
rodkowa wyst
ę
puje zatem tylko w tych rozwi
ą
zaniach, w których zadanie rozpatrujemy z
punktu widzenia nieinercjalnego układu odniesienia (najcz
ęś
ciej zwi
ą
zanego z samym ciałem
poruszaj
ą
cym si
ę
po okr
ę
gu).
Siły od
ś
rodkowa i do
ś
rodkowa nigdy nie wyst
ę
puj
ą
w tym samym rozwi
ą
zaniu zadania!
Sił
ę
od
ś
rodkow
ą
wyznaczamy tak, jak ka
ż
d
ą
inn
ą
sił
ę
bezwładno
ś
ci, pami
ę
taj
ą
c jednak,
ż
e w
jednostajnym ruchu po okr
ę
gu układ porusza si
ę
z przyspieszeniem do
ś
rodkowym:
m
a
F
F
d
odsr
b
⋅
−
=
≡
r
r
r
.
Siła ta ma kierunek wektora przyspieszenia do
ś
rodkowego, ale przeciwny do niego zwrot.
Warto
ść
siły od
ś
rodkowej obliczamy ze wzoru:
r
v
m
m
a
|
F
|
2
d
odsr
=
⋅
=
r
III.
Rozwi
ą
zywanie zada
ń
w układach inercjalnych i nieinercjalnych
Oba rozwi
ą
zania konkretnego zadania z mechaniki – zarówno to, rozpatrywane z punktu widzenia
inercjalnego układu odniesienia, jak i to, rozpatrywane z punktu widzenia nieinercjalnego układu
odniesienia) musz
ą
prowadzi
ć
do identycznego wyniku!
Wybór układu odniesienia nie mo
ż
e wpływa
ć
na wynik rozwi
ą
zania!
W wielu zagadnieniach „opłaca si
ę
” rozwi
ą
za
ć
zadanie z punktu widzenia nieinercjalnego układu
odniesienia. Najcz
ęś
ciej bowiem wystarczy zastosowa
ć
wył
ą
cznie I zasad
ę
dynamiki Newtona,
gdy
ż
rozpatrywane ciała najcz
ęś
ciej spoczywaj
ą
w tych układach odniesienia.
33
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
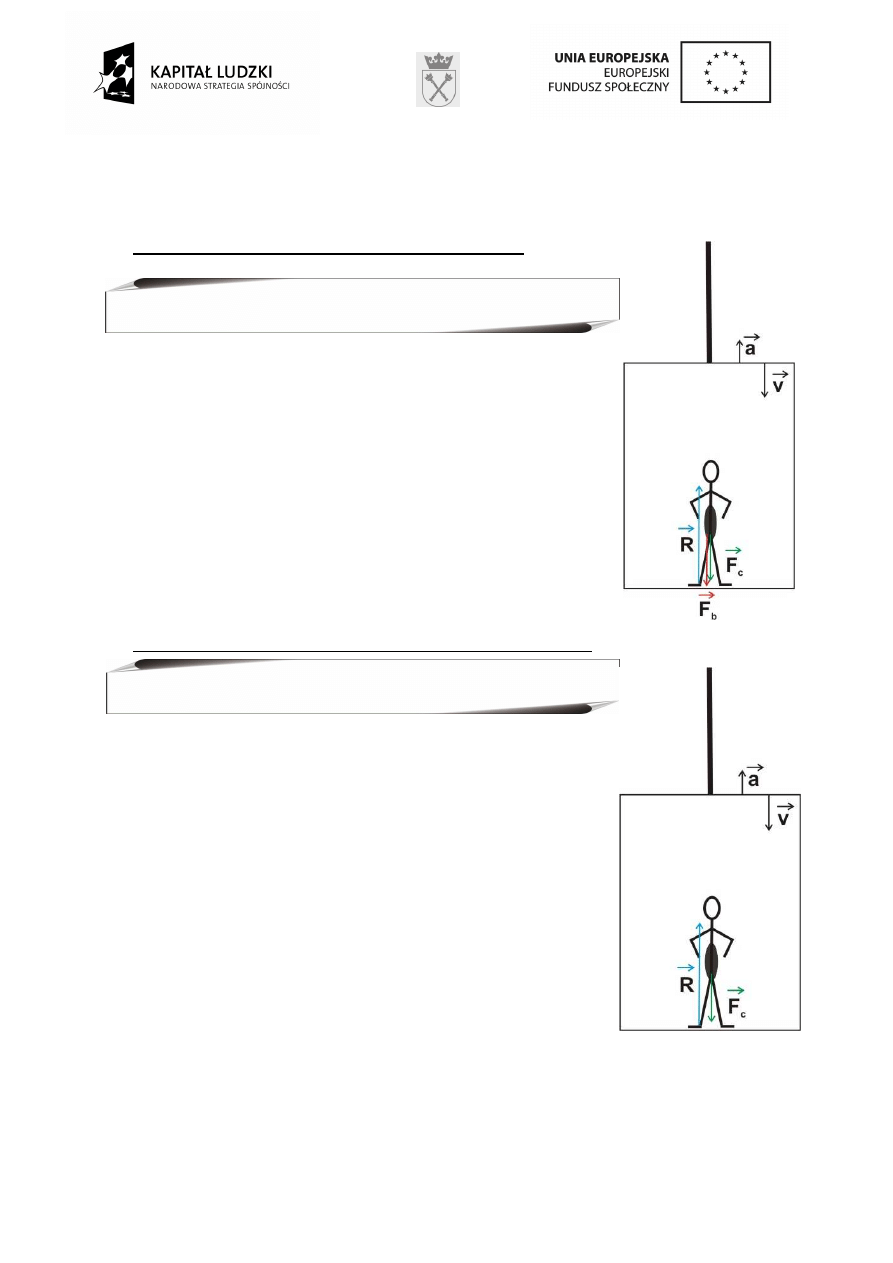
►
Przykład 5.3: Zapisz II zasad
ę
dynamiki Newtona dla człowieka stoj
ą
cego w windzie
poruszaj
ą
cej si
ę
w dół z opó
ź
nieniem
a
r
. Wykonaj zadanie z punktu widzenia układu inercjalnego
zwi
ą
zanego z Ziemi
ą
i układu nieinercjalnego zwi
ą
zanego z wind
ą
. Oblicz wskazanie wagi
spr
ęż
ynowej (ci
ęż
ar), gdy
10
/
g
a
=
, a masa człowieka M.
I sposób: w układzie nieinercjalnym, zwi
ą
zanym z wind
ą
.
Pami
ę
taj: musimy uwzgl
ę
dni
ć
sił
ę
bezwładno
ś
ci, bo rozwi
ą
zujemy
zadanie z punktu widzenia nieinercjalnego układu odniesienia.
I zasada dynamiki Newtona dla człowieka w windzie:
0
F
R
F
b
c
=
+
+
r
r
r
(bo człowiek nie porusza si
ę
wzgl
ę
dem windy). Korzystaj
ą
c z definicji
siły bezwładno
ś
ci, przepisujemy to równanie jeszcze raz, ci
ą
gle w
postaci wektorowej:
m
a
R
F
0
m
a
R
F
c
c
⋅
=
+
⇒
=
⋅
−
+
r
r
r
r
r
r
Wybieramy o
ś
OY układu współrz
ę
dnych zwrócon
ą
np. pionowo w
gór
ę
:
OY:
m
a
R
F
c
⋅
=
+
−
(wektor
v
r
jest zwrócony w dół, a ruch opó
ź
niony,
zatem wektor
a
r
jest zwrócony w gór
ę
, czyli zgodnie ze zwrotem
wybranej osi OY)
)
g
a
(
m
F
m
a
R
c
+
⋅
=
+
⋅
=
II sposób: w inercjalnym układzie odniesienia, zwi
ą
zanym z Ziemi
ą
.
Pami
ę
taj: tym razem nie uwzgl
ę
dniamy siły bezwładno
ś
ci, bo
rozwi
ą
zujemy zadania z punktu widzenia inercjalnego układu
odniesienia.
II zasada dynamiki Newtona dla człowieka w windzie:
m
a
R
F
c
⋅
=
+
r
r
r
(bo człowiek porusza si
ę
wraz z wind
ą
z przyspieszeniem
a
r
).
Wybieramy o
ś
OY układu współrz
ę
dnych zwrócon
ą
np. pionowo w dół:
OY:
m
a
R
F
c
⋅
−
=
−
(wektor
v
r
jest zwrócony w dół, a ruch opó
ź
niony,
zatem wektor
a
r
jest zwrócony w gór
ę
, czyli jego zwrot jest przeciwny
do zwrotu wybranej osi OY)
)
g
a
(
m
F
m
a
R
c
+
⋅
=
+
⋅
=
Wskazanie wagi (ci
ęż
ar ciała) jest, co do warto
ś
ci, równe sile reakcji
powierzchni wagi na człowieka.
)
g
a
(
m
R
Q
+
⋅
=
=
34
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
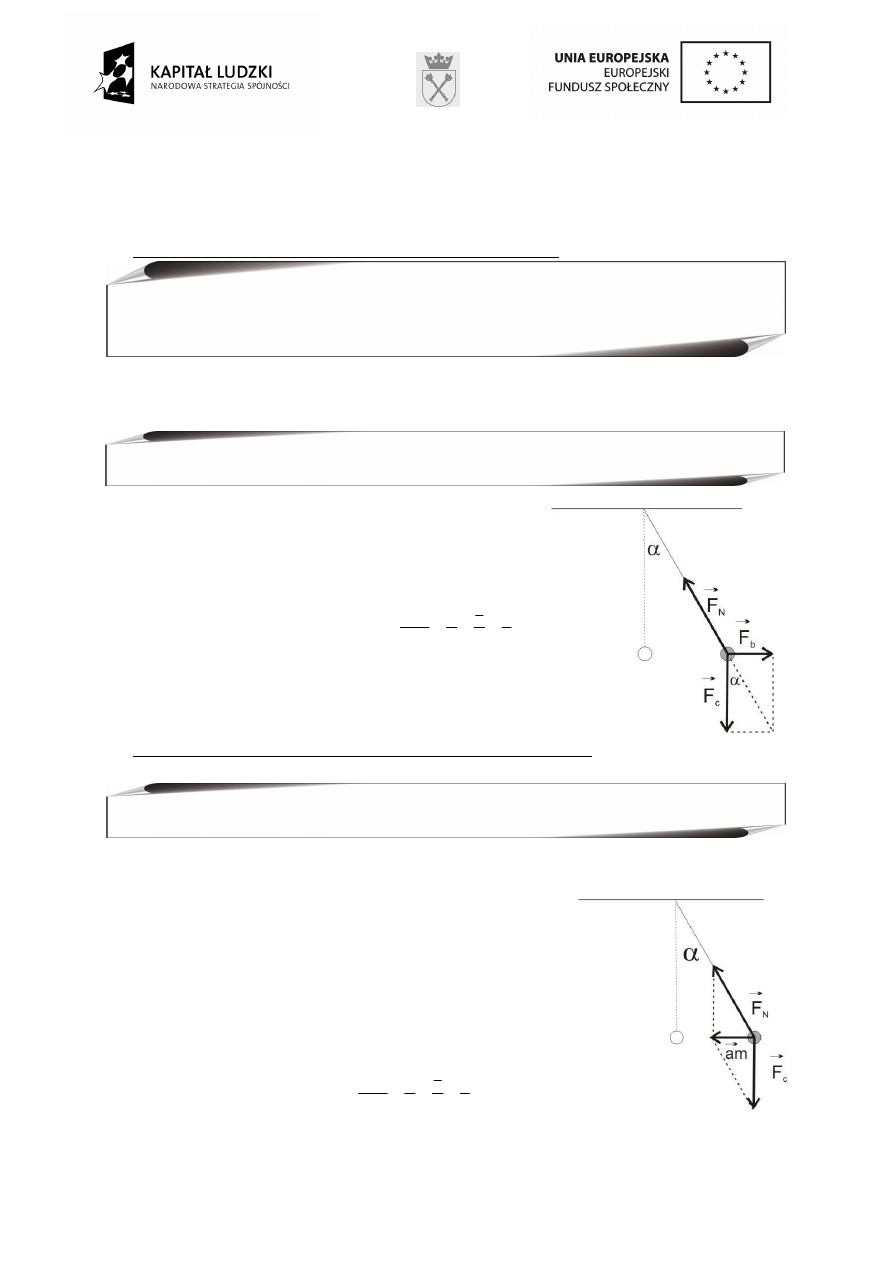
►
Przykład 5.4: U sufitu spoczywaj
ą
cego na przystanku autobusu zawieszono wahadło (mał
ą
mas
ę
na niewa
ż
kiej i nierozci
ą
gliwej nici). O jaki k
ą
t od pionu i w któr
ą
stron
ę
odchyli si
ę
to
wahadło podczas ruszania autobusu z przystanku ze stałym przyspieszeniem
a
r
, o warto
ś
ci
3
/
g
a
=
.
I sposób: w układzie nieinercjalnym, zwi
ą
zanym z autobusem.
Podczas ruszania autobusu z przystanku, wahadło przez krótk
ą
chwil
ę
odchyla si
ę
od pionu (w
tym czasie siła naci
ą
gu nici dostosowuje si
ę
do zaistniałych nowych okoliczno
ś
ci, tzn. pojawienia
si
ę
siły bezwładno
ś
ci). Nast
ę
pnie wahadło znajduje now
ą
pozycj
ę
równowagow
ą
– w odchyleniu o
pewien k
ą
t
α
od pionu
I zasada dynamiki Newtona, gdy wahadło odchyli si
ę
ju
ż
od pionu:
0
F
F
F
b
N
c
=
+
+
r
r
r
(bo wahadło
nie porusza si
ę
ju
ż
wzgl
ę
dem autobusu).
Pami
ę
taj: musimy uwzgl
ę
dni
ć
sił
ę
bezwładno
ś
ci, bo rozwi
ą
zujemy zadanie z punktu widzenia
nieinercjalnego układu odniesienia.
Siła naci
ą
gu musi zatem zrównowa
ż
y
ć
wektorow
ą
sum
ę
siły
ci
ęż
ko
ś
ci i siły bezwładno
ś
ci. Siła naci
ą
gu jest równoległa do
nici, a zatem i wektorowa suma siły ci
ęż
ko
ś
ci i siły
bezwładno
ś
ci musi by
ć
równoległa do nici (mówi
ą
c inaczej,
musi by
ć
ona odchylona od pionu o ten sam k
ą
t
α
, co ni
ć
).
Zatem tangens tego k
ą
ta wynosi
3
1
g
g
a
|
F
|
|
F
|
tg
3
g
c
b
=
=
=
=
α
r
r
.
II sposób: w inercjalnym układzie odniesienia, zwi
ą
zanym z Ziemi
ą
.
Pami
ę
taj: tym razem nie uwzgl
ę
dniamy siły bezwładno
ś
ci, bo rozwi
ą
zujemy zadanie z punktu
widzenia inercjalnego układu odniesienia.
II zasada dynamiki Newtona, gdy wahadło odchyli si
ę
ju
ż
od pionu:
m
a
F
F
N
c
⋅
=
+
r
r
r
(bo wahadło
przyspiesza razem z autobusem).
Wypadkowa siła działaj
ą
ca na ciało jest sum
ą
siły naci
ą
gu i siły
ci
ęż
ko
ś
ci.
Siła naci
ą
gu jest równoległa do nici, a zatem siła naci
ą
gu, siła
ci
ęż
ko
ś
ci i wektor
m
a
⋅
r
tworz
ą
trójk
ą
t prostok
ą
tny, którego
jednym z k
ą
tów jest k
ą
t
α
.
Tangens tego k
ą
ta wynosi
3
1
g
g
a
|
F
|
|
F
|
tg
3
g
c
b
=
=
=
=
α
r
r
.
35
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
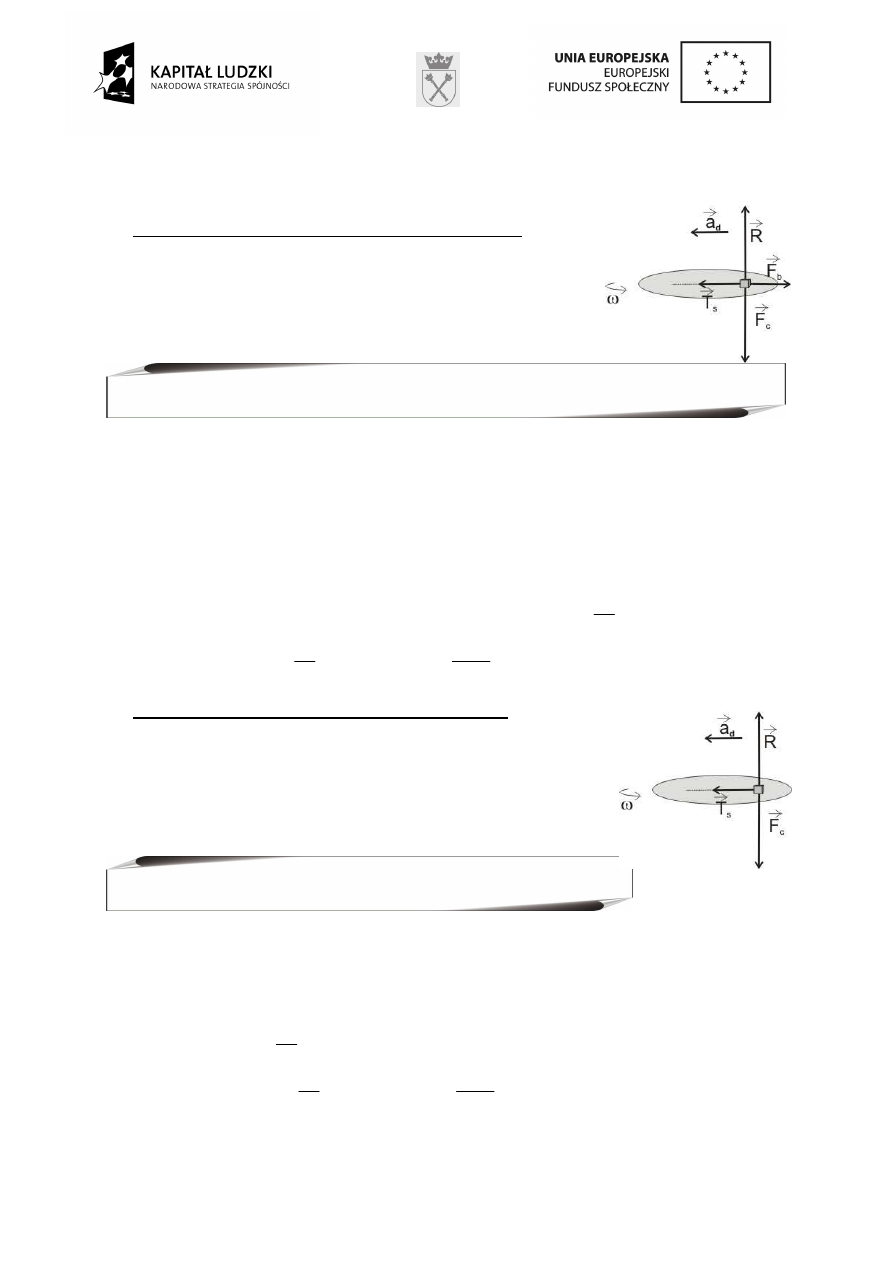
►
Przykład 5.5: Na poziomej tarczy wiruj
ą
cej z pr
ę
dko
ś
ci
ą
k
ą
tow
ą
ω
poło
ż
ono mały klocek.
Współczynnik tarcia klocka o powierzchni
ę
tarczy wynosi
s
µ
. Oblicz maksymaln
ą
odległo
ść
miejsca klocka od osi obrotu, w którym klocek pozostanie jeszcze na tarczy w spoczynku.
I sposób: w układzie nieinercjalnym, zwi
ą
zanym z tarcz
ą
.
O
ś
OY tego układu jest prostopadła do powierzchni tarczy, a o
ś
OX
jest równoległa do powierzchni tarczy i zwrócona do
ś
rodka tarczy;
pocz
ą
tek układu współrz
ę
dnych znajduje si
ę
np. w punkcie
poło
ż
enia klocka.
Pami
ę
taj: musimy uwzgl
ę
dni
ć
sił
ę
bezwładno
ś
ci, bo rozwi
ą
zujemy zadanie z punktu widzenia
nieinercjalnego układu odniesienia.
I zasada dynamiki Newtona z uwzgl
ę
dnieniem siły bezwładno
ś
ci:
0
F
T
R
F
b
s
c
=
+
+
+
r
r
r
r
(ciało nie
porusza si
ę
wzgl
ę
dem tarczy, czyli tak
ż
e wzgl
ę
dem nieinercjalnego układu współrz
ę
dnych).
Siły reakcji i ci
ęż
ko
ś
ci równowa
żą
si
ę
(klocek nie porusza si
ę
, a
tym bardziej nie przyspiesza w pionie): (*)
c
c
F
R
0
F
R
=
⇒
=
−
Składowa pozioma siły wypadkowej, w układzie klocka tak
ż
e jest
równa zeru i w przypadku granicznym (tu
ż
przed zerwaniem
przyczepno
ś
ci):
0
F
T
b
max
s
=
−
m
a
R
d
s
=
µ
⇒
.
Korzystaj
ą
c z wzoru na warto
ść
przyspieszenia do
ś
rodkowego:
r
v
a
2
d
=
oraz z równania (*),
otrzymujemy:
2
s
2
2
s
g
r
m
r
m
r
v
mg
ω
⋅
µ
=
⇒
⋅
⋅
ω
=
=
⋅
µ
.
II sposób: w układzie inercjalnym zwi
ą
zanym z Ziemi
ą
.
O
ś
OY tego układu jest prostopadła do powierzchni tarczy, a o
ś
OX
jest równoległa do powierzchni tarczy i zwrócona do
ś
rodka tarczy;
pocz
ą
tek układu współrz
ę
dnych znajduje si
ę
np. w punkcie poło
ż
enia
klocka.
II zasada dynamiki Newtona:
m
a
T
R
F
s
c
⋅
=
+
+
r
r
r
r
(ciało porusza si
ę
wzgl
ę
dem Ziemi po okr
ę
gu).
Pami
ę
taj: tym razem nie uwzgl
ę
dniamy siły bezwładno
ś
ci, bo
rozwi
ą
zujemy zadania z punktu widzenia inercjalnego układu odniesienia.
Siły reakcji i ci
ęż
ko
ś
ci równowa
żą
si
ę
(klocek nie porusza si
ę
, a
tym bardziej nie przyspiesza w pionie): (*)
c
c
F
R
0
F
R
=
⇒
=
−
Składowa pozioma siły wypadkowej, w układzie klocka tak
ż
e jest
równa zeru i w przypadku granicznym (tu
ż
przed zerwaniem
przyczepno
ś
ci):
m
a
T
d
max
s
⋅
=
m
a
R
d
s
=
µ
⇒
. Korzystaj
ą
c z wzoru na warto
ść
przyspieszenia
do
ś
rodkowego:
r
v
a
2
d
=
oraz z równania (*),
otrzymujemy:
2
s
2
2
s
g
r
m
r
m
r
v
mg
ω
⋅
µ
=
⇒
⋅
⋅
ω
=
=
⋅
µ
.
36
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
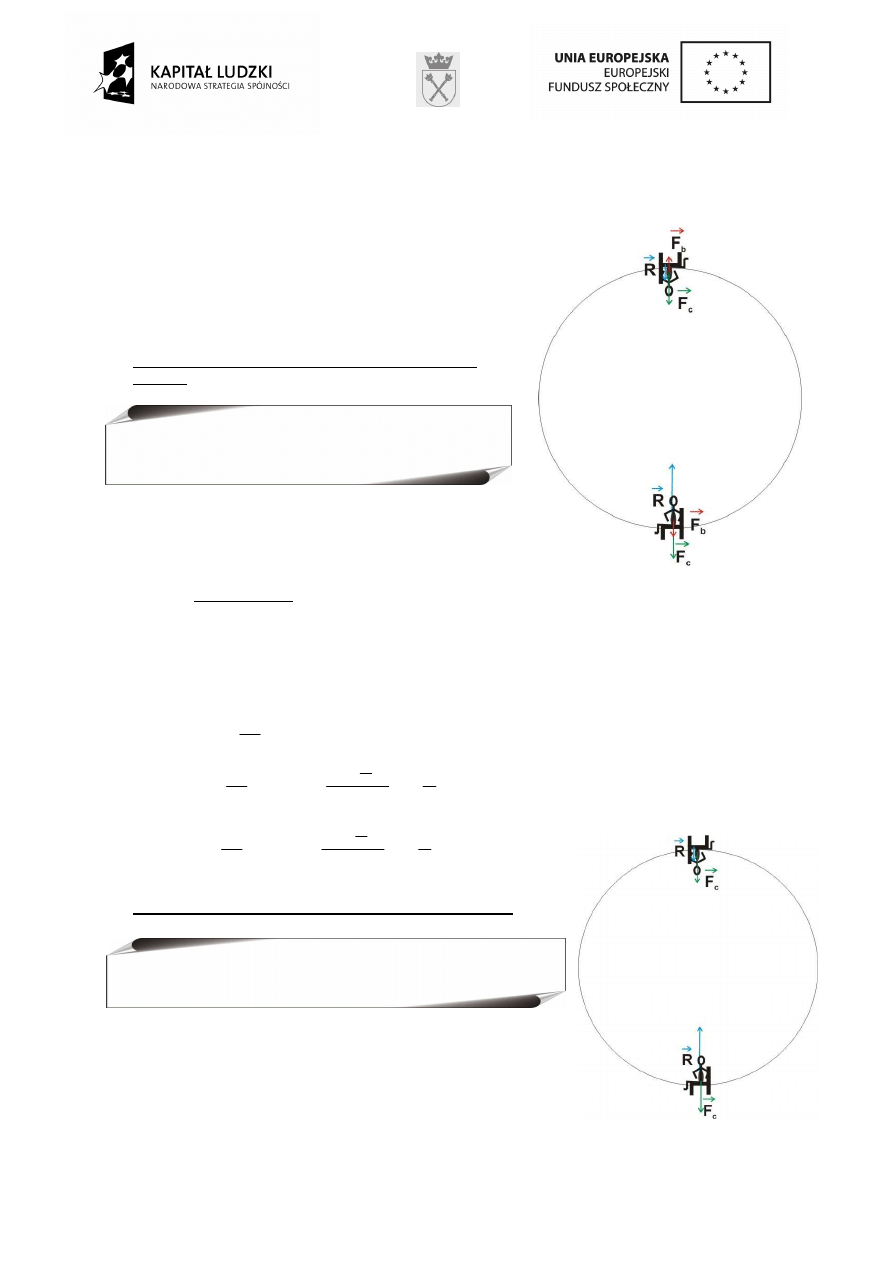
►
Przykład 5.6: Samolot wykonuje pionow
ą
p
ę
tl
ę
w kształcie okr
ę
gu o promieniu 200 m. W
najni
ż
szym i najwy
ż
szym punkcie toru szybko
ść
samolotu wynosi 100 m/s. Je
ż
eli przyjmiemy,
ż
e
masa pilota wynosi 80 kg, to jaki jest nacisk pilota na fotel w najni
ż
szym i najwy
ż
szym punkcie
toru? Zakładamy,
ż
e podczas wykonywania tej akrobacji głowa pilota samolotu jest stale
zwrócona w stron
ę
ś
rodka okr
ę
gu, po którym porusza si
ę
samolot.
Warto
ść
siły nacisku pilota na fotel jest równa warto
ś
ci siły
reakcji fotela na pilota. Pilot porusza si
ę
tak,
ż
e jego głowa
jest stale zwrócona do
ś
rodka p
ę
tli, a zatem porusza si
ę
po wewn
ę
trznej stronie tej p
ę
tli.
I sposób: w układzie nieinercjalnym, zwi
ą
zanym z
fotelem.
Pami
ę
taj: musimy uwzgl
ę
dni
ć
sił
ę
bezwładno
ś
ci, bo
rozwi
ą
zujemy zadanie z punktu widzenia nieinercjalnego
układu odniesienia.
I zasada dynamiki Newtona w obu przypadkach (pilot w
maksymalnym lub minimalnym poło
ż
eniu) jest dana:
0
R
F
F
b
c
=
+
+
r
r
r
Pami
ę
taj: Sił
ą
bezwładno
ś
ci w ruchu jednostajnym po okr
ę
gu jest siła od
ś
rodkowa.
Mo
ż
emy nie korzystaj
ą
c z wektorowej definicji siły bezwładno
ś
ci, od razu zapisa
ć
I zasad
ę
dynamiki Newtona w składowych igrekowych (o
ś
OY wybieramy pionow
ą
, zwrócon
ą
do
ś
rodka
okr
ę
gu).
Pilot w najwy
ż
szym punkcie toru:
0
F
R
mg
b
najwyzszy
=
−
+
mg
m
a
mg
F
R
d
b
najwyzszy
−
⋅
=
−
=
⇒
Pilot w najni
ż
szym punkcie toru:
0
F
R
mg
b
najnizszy
=
−
+
−
mg
m
a
mg
F
R
d
b
najnizszy
+
⋅
=
+
=
⇒
Poniewa
ż
R
v
a
2
d
=
, to:
N
3200
kg
80
10
m
200
)
100
(
m
g
R
v
R
2
s
m
2
s
m
2
najwyzszy
=
⋅
−
=
⋅
−
=
N
4800
kg
80
10
m
200
)
100
(
m
g
R
v
R
2
s
m
2
s
m
2
najnizszy
=
⋅
+
=
⋅
+
=
II sposób: w układzie inercjalnym, zwi
ą
zanym z Ziemi
ą
.
Pami
ę
taj: tym razem nie uwzgl
ę
dniamy siły bezwładno
ś
ci, bo
rozwi
ą
zujemy zadania z punktu widzenia inercjalnego układu
odniesienia.
II zasada dynamiki Newtona w obu przypadkach (pilot w
maksymalnym lub minimalnym poło
ż
eniu) jest dana:
m
a
F
R
F
d
d
c
⋅
=
=
+
r
r
r
r
(krzesełko wraz z samolotem i pilotem
porusza si
ę
ruchem jednostajnym po okr
ę
gu, zatem sił
ą
wypadkow
ą
działaj
ą
c
ą
na pilota jest siła do
ś
rodkowa).
37
Projekt jest współfinansowany z Europejskiego Funduszu Społecznego
w ramach programu operacyjnego KAPITAŁ LUDZKI
O
ś
OY wybieramy pionow
ą
, np. zwrócon
ą
do
ś
rodka okr
ę
gu.
Pilot w najwy
ż
szym punkcie toru:
0
F
R
mg
b
najwyzszy
=
−
+
mg
m
a
mg
F
R
d
b
najwyzszy
−
⋅
=
−
=
⇒
Pilot w najni
ż
szym punkcie toru:
0
F
R
mg
b
najnizszy
=
−
+
−
mg
m
a
mg
F
R
d
b
najnizszy
+
⋅
=
+
=
⇒
Poniewa
ż
R
v
d
2
a
=
, to:
N
3200
kg
80
10
m
200
)
100
(
m
g
R
v
R
2
s
m
2
s
m
2
najwyzszy
=
⋅
−
=
⋅
−
=
N
4800
kg
80
10
m
200
)
100
(
m
g
R
v
R
2
s
m
2
s
m
2
najnizszy
=
⋅
+
=
⋅
+
=
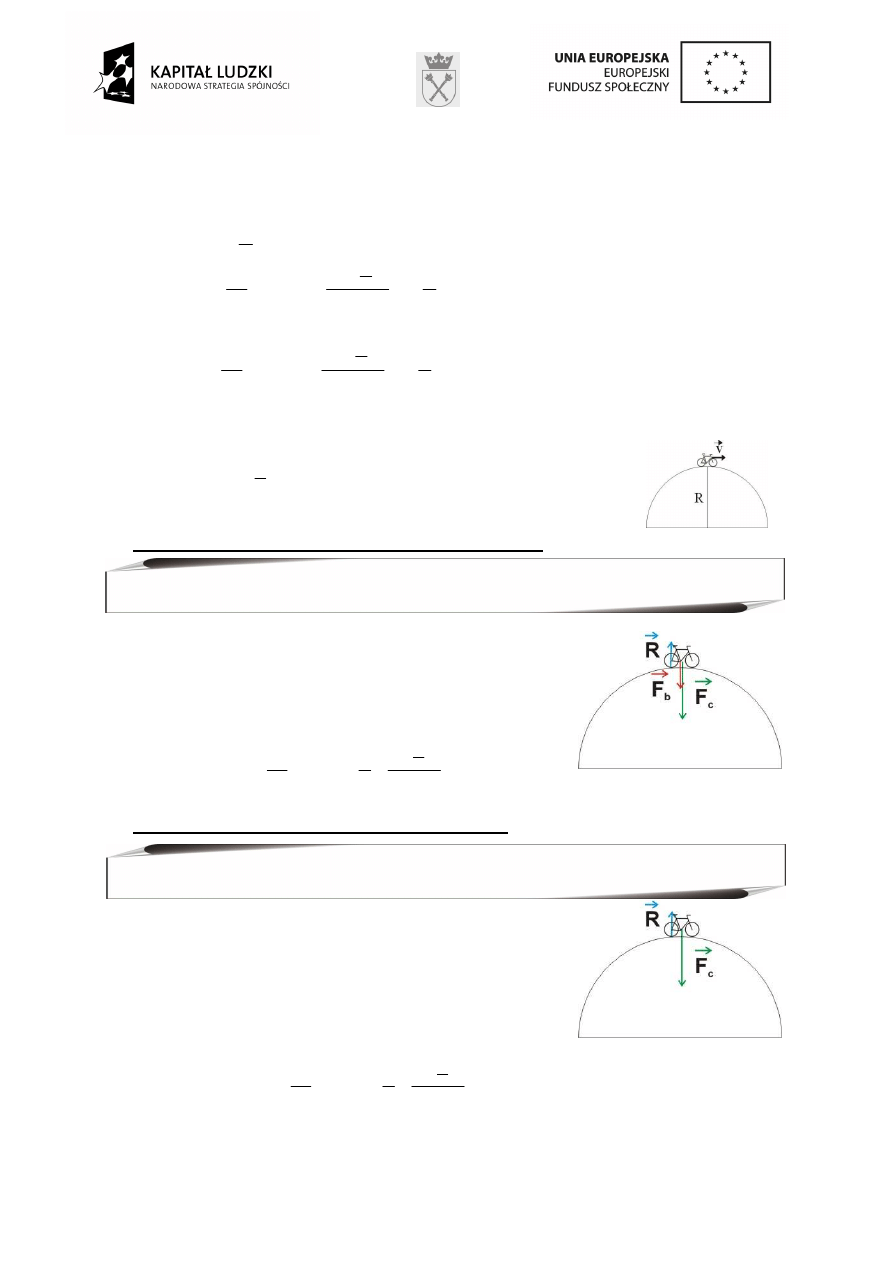
►
Przykład 5.7: Przez wypukły półkolisty mostek o promieniu
m
20
R
=
przeje
ż
d
ż
a rowerzysta. Najwy
ż
szy punkt wypukło
ś
ci mija z
pr
ę
dko
ś
ci
ą
s
m
10
v
=
. Oblicz sił
ę
nacisku wywieran
ą
na podło
ż
e przez
rowerzyst
ę
. Ł
ą
czna masa jego i roweru wynosi
kg
80
m
=
.
I sposób: w układzie nieinercjalnym, zwi
ą
zanym z rowerem:
Pami
ę
taj: musimy uwzgl
ę
dni
ć
sił
ę
bezwładno
ś
ci, bo rozwi
ą
zujemy zadanie z punktu widzenia
nieinercjalnego układu odniesienia.
Siła nacisku roweru na mostek jest jak zawsze równa sile reakcji
powierzchni mostka na rower.
I zasada dynamiki Newtona:
0
R
F
F
b
c
=
+
+
r
r
r
Rower porusza si
ę
po zewn
ę
trznej stronie zakrzywionego
mostka. Wybieramy o
ś
OY, np. zwrócon
ą
pionowo w dół:
0
F
R
mg
b
=
−
−
N
400
kg
80
m
20
)
10
(
10
m
R
v
g
F
mg
R
2
s
m
s
m
2
b
2
=
⋅
−
=
⋅
−
=
−
=
II sposób: w układzie inercjalnym zwi
ą
zanym z Ziemi
ą
.
Pami
ę
taj: tym razem nie uwzgl
ę
dniamy siły bezwładno
ś
ci, bo rozwi
ą
zujemy zadania z punktu
widzenia inercjalnego układu odniesienia.
II zasada dynamiki Newtona:
m
a
F
R
F
d
d
c
⋅
=
=
+
r
r
r
r
(rower
porusza si
ę
ruchem jednostajnym, ale po półokr
ę
gu, dlatego sił
ą
wypadkow
ą
działaj
ą
c
ą
na niego jest siła do
ś
rodkowa)
Rower porusza si
ę
po zewn
ę
trznej stronie zakrzywionego
mostka. Wybieramy o
ś
OY, np. zwrócon
ą
pionowo w dół.
Wówczas równanie algebraiczne przyjmuje posta
ć
:
OY:
m
a
R
mg
d
⋅
=
−
N
400
kg
80
m
20
)
10
(
10
m
R
v
g
m
a
mg
R
2
s
m
s
m
2
d
2
=
⋅
−
=
⋅
−
=
⋅
−
=
.
Wyszukiwarka
Podobne podstrony:
blok 2 skrypt id 90327 Nieznany (2)
blok 3 skrypt id 90351 Nieznany (2)
blok 8 skrypt id 90430 Nieznany (2)
blok 2 skrypt id 90327 Nieznany (2)
blok 3 skrypt id 90351 Nieznany (2)
BLOK 1a 2 3 id 90304 Nieznany
md skrypt id 290151 Nieznany
blok 7 zadania id 90420 Nieznany (2)
AiSD skrypt id 53503 Nieznany (2)
Enzymologia Skrypt I id 162159 Nieznany
blok 2 konflikt id 90329 Nieznany (2)
Ekonomia skrypt id 156120 Nieznany
MANGANOMETRIA skrypt id 278631 Nieznany
blok 3 zadania id 90352 Nieznany (2)
Eschatologia skrypt id 163497 Nieznany
mikro II skrypt id 300610 Nieznany
Prawoznawstwo skrypt id 388928 Nieznany
blok 2 zadania id 90328 Nieznany
więcej podobnych podstron