1
Politechnika Wrocławska
W y d z i a ł M e c h a n i c z n y
W y d z i a ł M e c h a n i c z n y
Instytut Technologii Maszyn i Automatyzacji
Kierunek studiów:
Mechatronika
Mechatronika
Studia I-stopnia, rok I, sem. 2, rok akad. 2008/09
Materiały do wykładu „
Wst
ę
p do
Wst
ę
p do
mechatroniki
mechatroniki”
Sygnały i sensory
Dr in
ż
. Zbigniew Smalec (p. 3.19 B-4)
Cz
ęść
2 (1 – 91)
Wrocław, 2009
Wa
ż
nym problemem w fazie projektowania wyrobu mechatronicznego jest transmisja
sygnałów analogowych i cyfrowych. Wymaga to od pracowników realizuj
ą
cych taki projekt
znacznej wiedzy i do
ś
wiadcze
ń
w tym zakresie. Z zagadnieniami komunikacji cyfrowej lub
sieciowymi systemami komunikacyjnymi mechatronicy s
ą
stale konfrontowani. Dlatego te
ż
konieczne jest zapoznanie si
ę
takimi wa
ż
nymi zagadnieniami jak np. rodzaje sygnałów,
kodowanie danych, transmisja danych, własno
ś
ci ró
ż
nych interfejsów, czy budowa i działanie
sieciowych systemów komunikacyjnych.
Sygnały analogowe i cyfrowe
W obecnie stosowanych systemach automatyzacji coraz wi
ę
cej urz
ą
dze
ń
pracuje w sposób
cyfrowy. Komputerowe sterowniki wraz z sensorami i aktuatorami wypieraj
ą
wcze
ś
niej
stosowane w automatyzacji procesów urz
ą
dzenia analogowe. Jest to spowodowane post
ę
pem
technologicznym i korzy
ś
ciami wynikaj
ą
cymi z techniki cyfrowej. Równie
ż
transmisja cyfrowa
wypiera standardowe sygnały analogowe, takie jak np.: 0 do +10 V, -5 do +5 V, lub 4 mA do
20 mA.
Systemy techniczne mo
ż
na klasyfikowa
ć
na podstawie sygnałów wyst
ę
puj
ą
cych na ich
wej
ś
ciach i wyj
ś
ciach. Sygnały ró
ż
ni
ą
si
ę
mi
ę
dzy sob
ą
natur
ą
techniczn
ą
. Sygnał jest to
dowolna wielko
ść
fizyczna wyst
ę
puj
ą
ca (przebiegaj
ą
ca) w czasie, która słu
ż
y do
przekazywania informacji. Czyli sygnał jest no
ś
nikiem informacji (np. temperatura,
ci
ś
nienie, napi
ę
cie, pr
ą
d, droga, pr
ę
dko
ść
itp.).
Sygnały, w zale
ż
no
ś
ci od ich warto
ś
ci i przebiegu czasowego, mo
ż
na podzieli
ć
na ró
ż
ne
rodzaje. I tak np. mog
ą
by
ć
sygnały ci
ą
głe i dyskretne, a tak
ż
e analogowe i cyfrowe (w tym
binarne).
W sygnałach analogowych zakres warto
ś
ci mo
ż
e si
ę
zmienia
ć
w sposób ci
ą
gły.
Sygnały
2
Sygnały analogowe i cyfrowe
Sygnał
Sygnał jest fizyczn
ą
wielko
ś
ci
ą
zmieniaj
ą
c
ą
si
ę
w czasie, która przenosi zawart
ą
w nim informacj
ę
,
czyli sygnał jest no
ś
nikiem informacji. Fizyczna wielko
ść
nazywana jest parametrem informacyjnym.
Zarówno parametr informacyjny jak i przebieg czasowy sygnału mog
ą
by
ć
ci
ą
głe lub dyskretne.
Przykład: parametrami informacyjnymi w urz
ą
dzeniach elektronicznych mog
ą
by
ć
: napi
ę
cie, cz
ę
stotliwo
ść
,
pr
ą
d, szeroko
ść
impulsu.
Sygnał analogowy jest ci
ą
gły amplitudowo (warto
ś
ciowo), tzn. parametr informacyjny mo
ż
e (w ramach
okre
ś
lonych granic) przyjmowa
ć
dowolnie wiele warto
ś
ci. Rozdzielczo
ść
teoretycznie jest niesko
ń
czenie
wysoka. Sygnał analogowy mo
ż
e by
ć
ci
ą
gły lub dyskretny w czasie.
Sygnał cyfrowy jest dyskretny amplitudowo i zwykle dyskretny w czasie. W cyfrowej technice układów s
ą
stosowane prawie wył
ą
cznie sygnały dwuwarto
ś
ciowe (binarne) o niskim (ang. Low) i wysokim (ang. High)
poziomie.
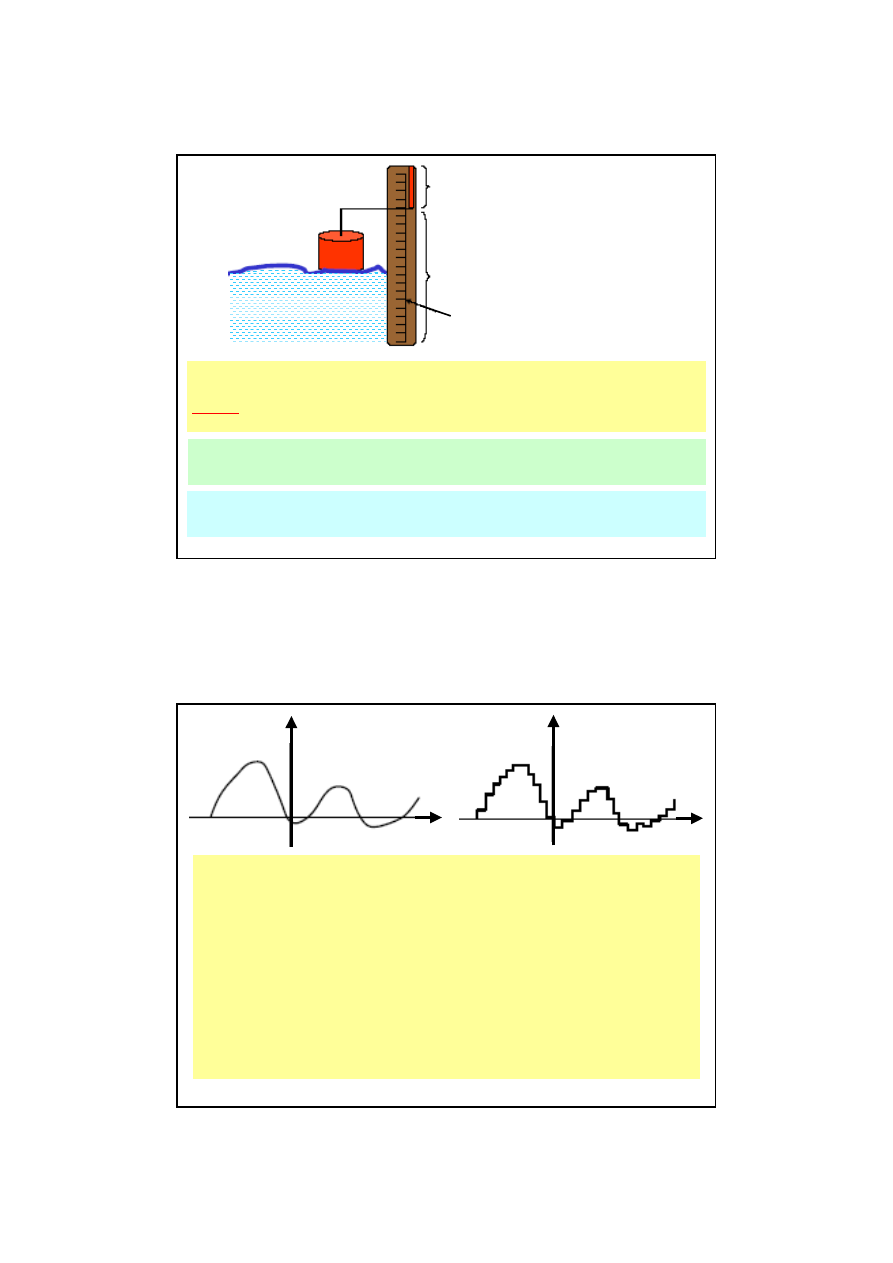
0
1
Sygnał binarny:
Sygnał binarny:
Wysoki poziom wody
Informacja analogowa:
Stan poziomu wody
Niski poziom wody
Analogowe i dyskretne przebiegi sygnału
W praktyce coraz cz
ęś
ciej stosowana jest technika cyfrowa przetwarzania i transmisji
informacji, która w porównaniu z technik
ą
analogow
ą
zapewnia znaczne korzy
ś
ci. Na
szerokie i bardzo skuteczne obszary zastosowania techniki cyfrowej wskazuj
ą
przykłady stale
rosn
ą
cej liczby komputerów PC, sieci komunikacyjnych oraz stacji do bezpo
ś
redniego
sterowania cyfrowego DDC (ang. Direct Digital Control).
W przeciwie
ń
stwie do techniki analogowej, w technice cyfrowej nie pracuje si
ę
z sygnałami
o przebiegu ci
ą
głym, lecz z informacjami kodowanymi w dyskretne warto
ś
ci sygnałów. Je
ż
eli
w sygnale cyfrowym rozró
ż
nia si
ę
tylko dwa stany, to wtedy jest to sygnał binarny.
Pojedynczy znak binarny jest okre
ś
lany jako bit (skrót pochodzi z j
ę
zyka angielskiego -
binary digit).
Sygnał binarny ze swoimi tylko dwoma ró
ż
nymi stanami, w porównaniu z sygnałem
analogowym, ma bardzo mał
ą
zawarto
ść
informacji. Je
ż
eli obrazowana w postaci cyfrowej
wielko
ść
wymaga wi
ę
kszego zakresu warto
ś
ci, to musi by
ć
ona zapisana za pomoc
ą
wielu
bitów (bajty, słowa).
Ci
ą
gły przebieg
sygnału
Dyskretny
przebieg sygnału
t
t
3
Sygnały analogowe i cyfrowe
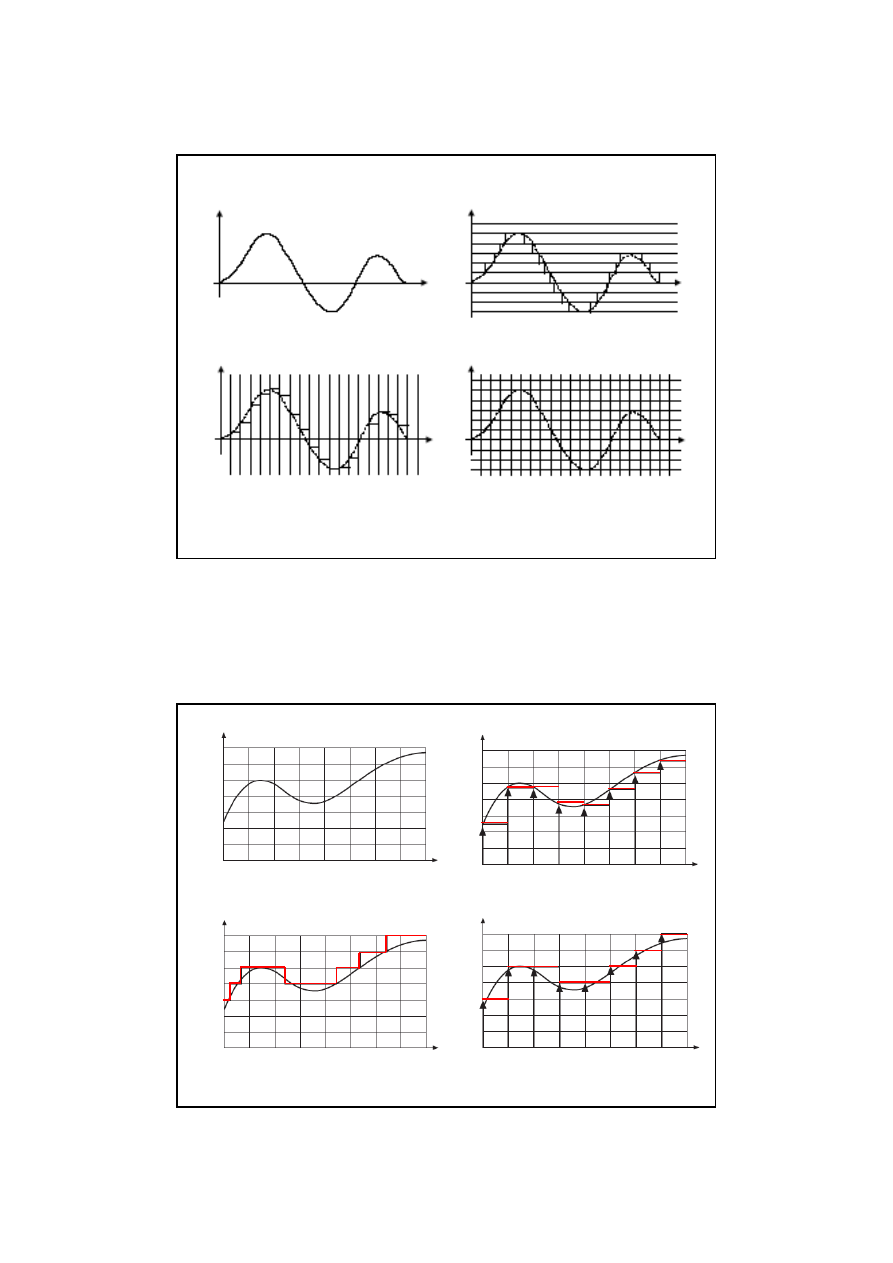
Analogowa
i
cyfrowa
reprezentacja informacji:
Sygnał ci
ą
gły warto
ś
ciowo i w czasie
Sygnał ci
ą
gły w czasie i dyskretny
warto
ś
ciowo
t
t
Sygnał dyskretny w czasie i ci
ą
gły
warto
ś
ciowo
Dyskretny w czasie i dyskretny
warto
ś
ciowo sygnał cyfrowy
Rodzaje sygnałów
Sygnały analogowe
- ci
ą
głe warto
ś
ci
- ci
ą
głe w czasie
x
t
x
t
- ci
ą
głe warto
ś
ci
- dyskretne w czasie
a)
b)
Sygnały cyfrowe
x
- dyskretne warto
ś
ci
- ci
ą
głe w czasie
x
c)
d)
- dyskretne warto
ś
ci
- dyskretne w czasie
t
t
4
Rodzaje sygnałów - sygnały cyfrowe c.d.
Sygnał binarny (dwuwarto
ś
ciowy)
Sygnał trójwarto
ś
ciowy
x
x
e)
f)
t
t
0
1
-100%
0%
100%
Zakresy warto
ś
ci wielko
ś
ci (danych) cyfrowych
1 bit
⇒
2
1
stanów
= 2 warto
ś
ci
2 bity
⇒
2
2
stanów
= 4 warto
ś
ci
3 bity
⇒
2
3
stanów
= 8 warto
ś
ci
4 bity
⇒
2
4
stanów
= 16 warto
ś
ci
8 bitów
⇒
2
8
stanów
= 256 warto
ś
ci
10 bitów
⇒
2
10
stanów
= 1.024 warto
ś
ci
12 bitów
⇒
2
12
stanów
= 4.096 warto
ś
ci
16 bitów
⇒
2
16
stanów
= 65.536 warto
ś
ci
20 bitów
⇒
2
20
stanów
= 1.048.576 warto
ś
ci
itd.
1 bit
⇒
2
1
stanów
= 2 warto
ś
ci
2 bity
⇒
2
2
stanów
= 4 warto
ś
ci
3 bity
⇒
2
3
stanów
= 8 warto
ś
ci
4 bity
⇒
2
4
stanów
= 16 warto
ś
ci
8 bitów
⇒
2
8
stanów
= 256 warto
ś
ci
10 bitów
⇒
2
10
stanów
= 1.024 warto
ś
ci
12 bitów
⇒
2
12
stanów
= 4.096 warto
ś
ci
16 bitów
⇒
2
16
stanów
= 65.536 warto
ś
ci
20 bitów
⇒
2
20
stanów
= 1.048.576 warto
ś
ci
itd.
5
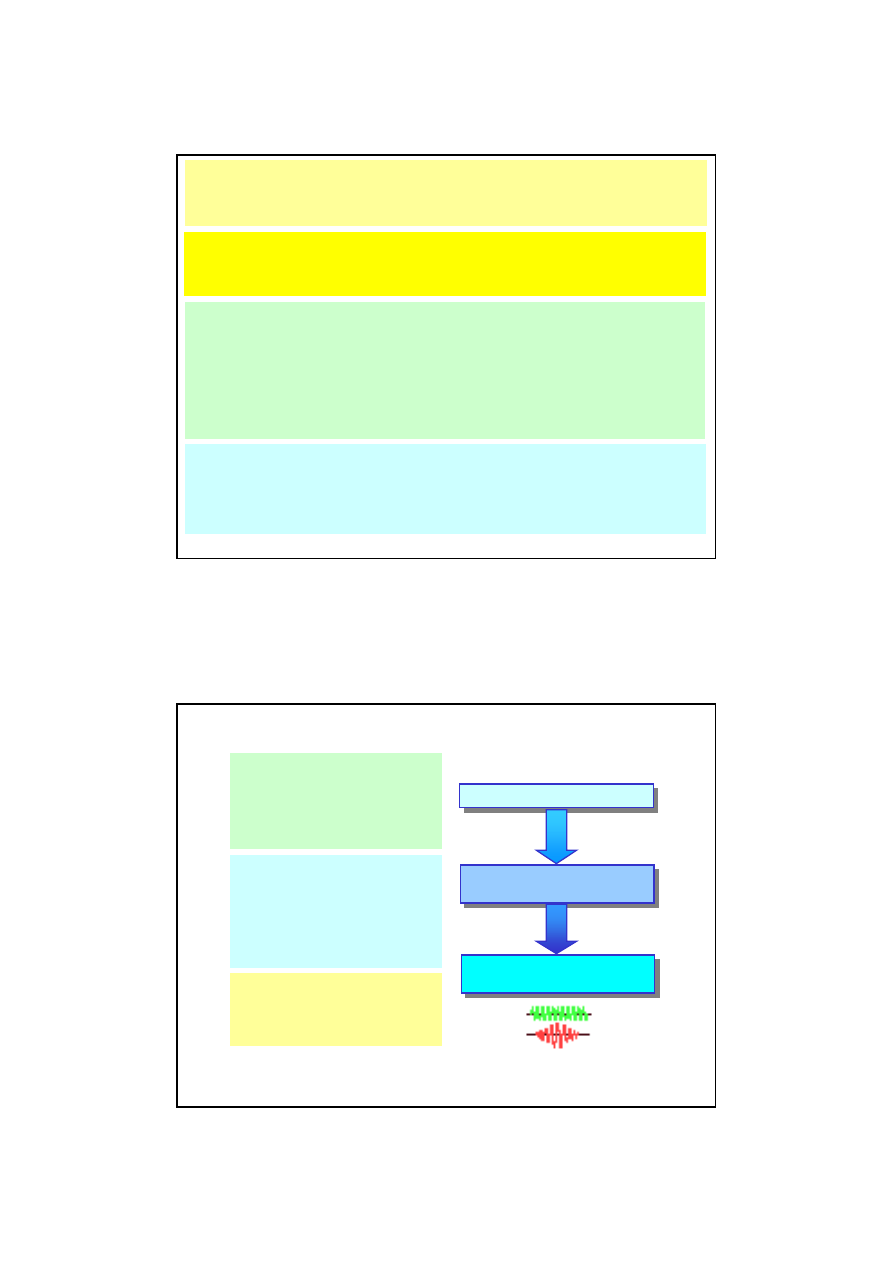
Sygnały analogowe i cyfrowe
Obecnie preferowane jest
cyfrowe przetwarzanie
informacji:
Cyfrowy (ang. Digital, łac. Digitus - palec) w sensie
przeno
ś
nym, to odliczanie za pomoc
ą
palców.
Analogowe przetwarzanie sygnałów
wzgl.
informacji
opiera
si
ę
na manipulowaniu informacjami ci
ą
głymi warto
ś
ciowo.
Jest zwarte, ale podatne na wiele wpływów i zakłóce
ń
.
Cyfrowe przetwarzanie sygnałów
wzgl.
informacji
opiera si
ę
na manipulacji informacjami dyskretnymi warto
ś
ciowo
i w czasie.
Jest ono szczególnie zwarte i korzystne w realizacji
przetwarzania poszczególnych sygnałów binarnych lub
grup sygnałów binarnych.
Cała dynamika sygnału jest do dyspozycji dla sygnałów
binarnych (regeneracja, odporno
ść
na zakłócenia).
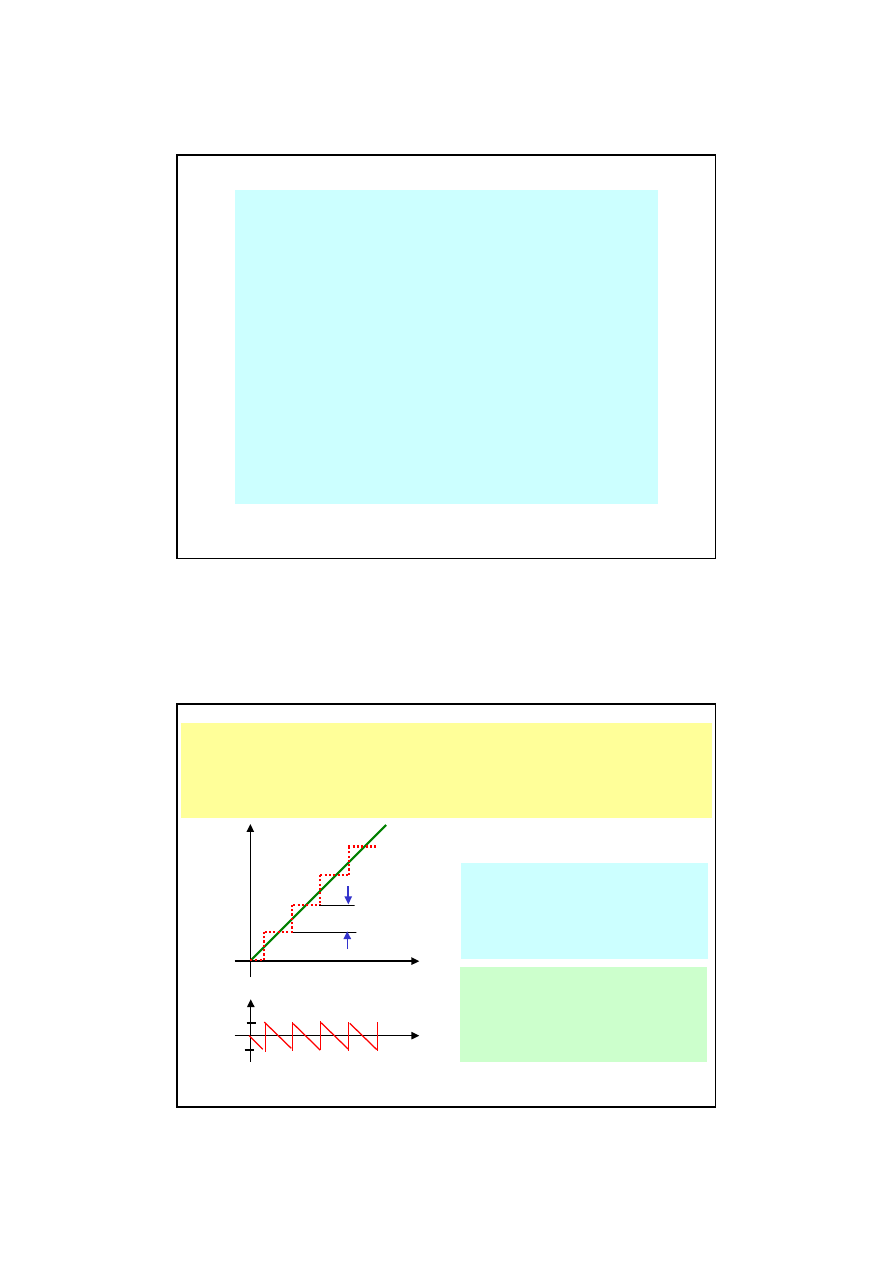
Przetwarzanie sygnałów analogowych na cyfrowe
Aby mo
ż
na było wielko
ś
ci (sygnały) analogowe przetwarza
ć
w sposób cyfrowy, musz
ą
by
ć
one
najpierw zamienione na warto
ś
ci cyfrowe. Poniewa
ż
jednak wielko
ść
analogowa mo
ż
e
przyjmowa
ć
dowolnie wiele warto
ś
ci po
ś
rednich, a zakres warto
ś
ci wielko
ś
ci cyfrowej jest
ograniczony, to wskutek tej zamiany (przetwarzania) na dyskretne warto
ś
ci cyfrowe powstaj
ą
bł
ę
dy kwantyzacji. Im wi
ę
cej bitów zostanie wykorzystanych do tego zobrazowania i im cz
ęś
ciej
próbkowany jest sygnał analogowy, tym te bł
ę
dy s
ą
mniejsze.
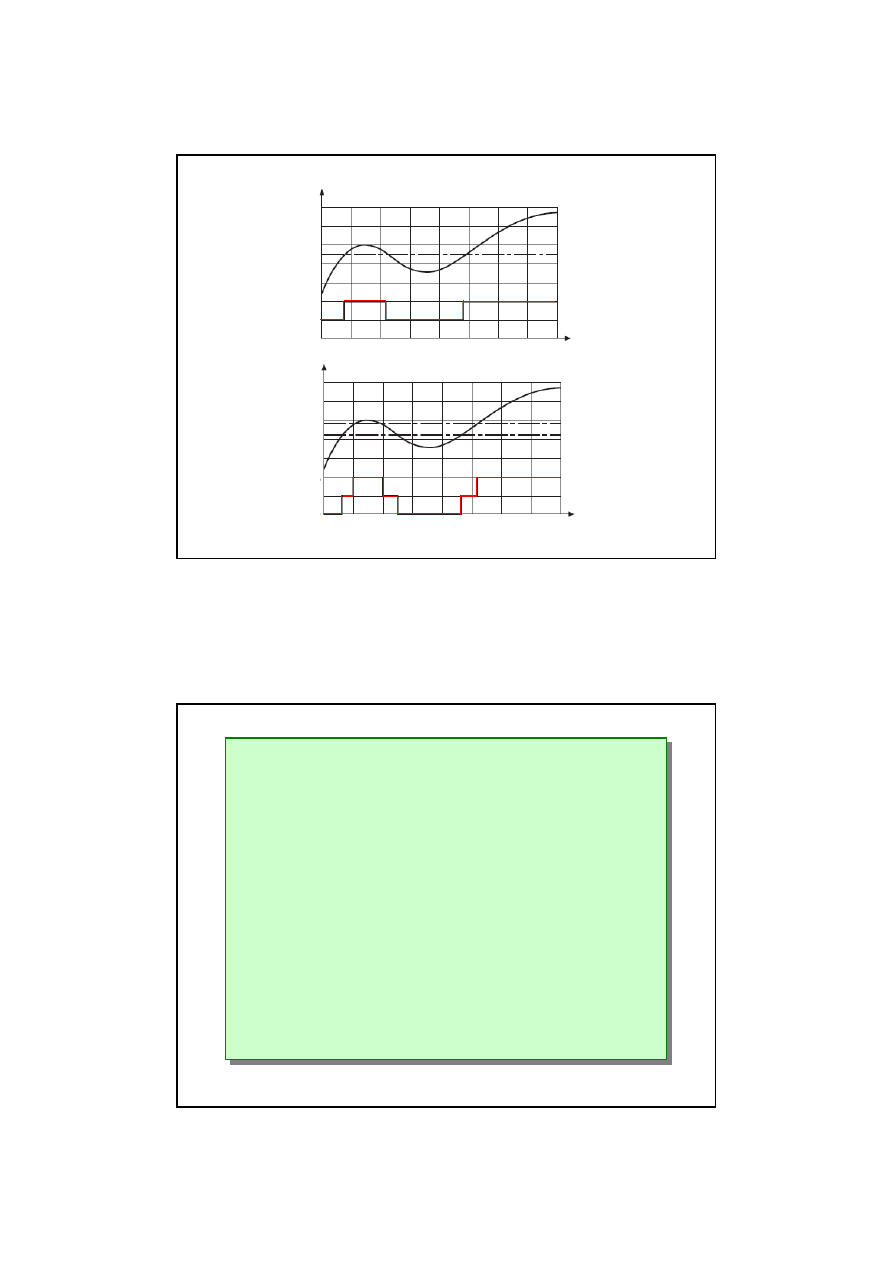
Sygnał analogowy
Sygnał
cyfrowy
Amplituda
sygnału
Bł
ą
d
[bit]
t
t
1/2
-1/2
1 bit
Bł
ę
dy kwantyzacji wskutek ograniczonej rozdzielczo
ś
ci
i dyskretnego próbkowania
Analogowy zakres pomiarowy: 0 do 300 mm
1. Zakres warto
ś
ci 8-bitowej zmiennej: 256
Bł
ą
d kwantyzacji: (300/256) mm = 1,2 mm
2. Zakres warto
ś
ci 12-bitowej zmiennej: 4096
Bł
ą
d kwantyzacji: (300/4096) mm = 0,073 mm
Porównanie bł
ę
dów kwantyzacji przy
Porównanie bł
ę
dów kwantyzacji przy
pomiarze długo
ś
ci dla ró
ż
nych rozdzielczo
ś
ci
pomiarze długo
ś
ci dla ró
ż
nych rozdzielczo
ś
ci
przetworników analogowo
przetworników analogowo
-
-
cyfrowych A/C
cyfrowych A/C
Ze wzrostem liczby bitów rosn
ą
jednak nakłady
zwi
ą
zane z przetwarzaniem i transmisj
ą
danych.
Aby zapewni
ć
mo
ż
liwie mał
ą
utrat
ę
informacji
powstaj
ą
c
ą
wskutek przetwarzania A/C
i równocze
ś
nie nie wybiera
ć
niepotrzebnie du
ż
ego
zakresu zobrazowania binarnego, zakres warto
ś
ci
nale
ż
y dopasowa
ć
do ka
ż
dorazowego zadania.
6
Za stosowaniem sygnałów binarnych przemawiaj
ą
nast
ę
puj
ą
ce wzgl
ę
dy:
- du
ż
y odst
ę
p sygnału od zakłóce
ń
,
- mo
ż
liwe s
ą
wi
ę
ksze tolerancje w poziomie reprezentowanych wielko
ś
ci fizycznych,
- łatwe w realizacji,
- wymagaj
ą
mało obwodów podstawowych.
Porównanie sygnałów analogowych z cyfrowymi
Zaletami techniki analogowej s
ą
:
Tania (np. realizacja układów cyfrowych z elementami dyskretnymi wymaga wi
ę
kszych nakładów ni
ż
odpowiedni
układ analogowy),
Cz
ę
sto jest prostsza,
Dla jednakowej transmisji sygnał analogowy ma mniejsze wymagania dla kanału ni
ż
sygnał cyfrowy,
Ci
ą
głe przetwarzanie amplitudowe i w czasie (?!),
Cz
ę
sto nie jest wymagane przekształcanie przetwarzanej wielko
ś
ci,
Zwarta, równie
ż
przy przekroczeniu wyspecyfikowanych zakresów sygnału.
Zalety techniki cyfrowej:
Jest tania przy zastosowaniu układów o wysokiej skali integracji,
Mo
ż
liwa dowolna dokładno
ść
,
Odporno
ść
na zakłócenia, niezawodno
ść
,
Sygnały s
ą
mo
ż
liwe do zapami
ę
tania.
Transmisja równoległa zobrazowanie parametru informacyjnego (z 2 n mo
ż
liwymi warto
ś
ciami) – warto
ś
ci sygnału
s
ą
przenoszone (transmitowane) przez n kanałów. Zalety: natychmiast jest kompletna warto
ść
, ci
ą
głe w czasie,
odporne na zakłócenia.
Transmisja szeregowa – warto
ś
ci n-bitowego parametru informacyjnego s
ą
kolejno po sobie transmitowane przez
1 kanał w n chwilach czasu. Zalety: małe nakłady techniczne (?!).
Dane i sygnały
Dane
Dane
Zobrazowanie (przedstawienie)
rzeczy, koncepcji, wyobra
ż
e
ń
i instrukcji w sposób
sformalizowany.
Sygnał
Sygnał
Fizyczne zobrazowanie danych
przez charakterystyczne
przestrzenne i/lub czasowe
zmiany warto
ś
ci wielko
ś
ci
fizycznych.
Zatem sygnały s
ą
rzeczywist
ą
fizyczn
ą
reprezentacj
ą
zobrazowa
ń
abstrakcyjnych:
danych.
Przedmioty naszego my
ś
lenia
Przedmioty naszego my
ś
lenia
Dane jako sformalizowane
zobrazowanie
Dane jako sformalizowane
zobrazowanie
Sygnały jako rzeczywiste
zobrazowanie danych
Sygnały jako rzeczywiste
zobrazowanie danych
Ś
wiat
abstrakcyjny
Konwencje do
zobrazowania tre
ś
ci
my
ś
lenia
Konwencje do
zobrazowania
danych
Ś
wiat
fizyczny
7
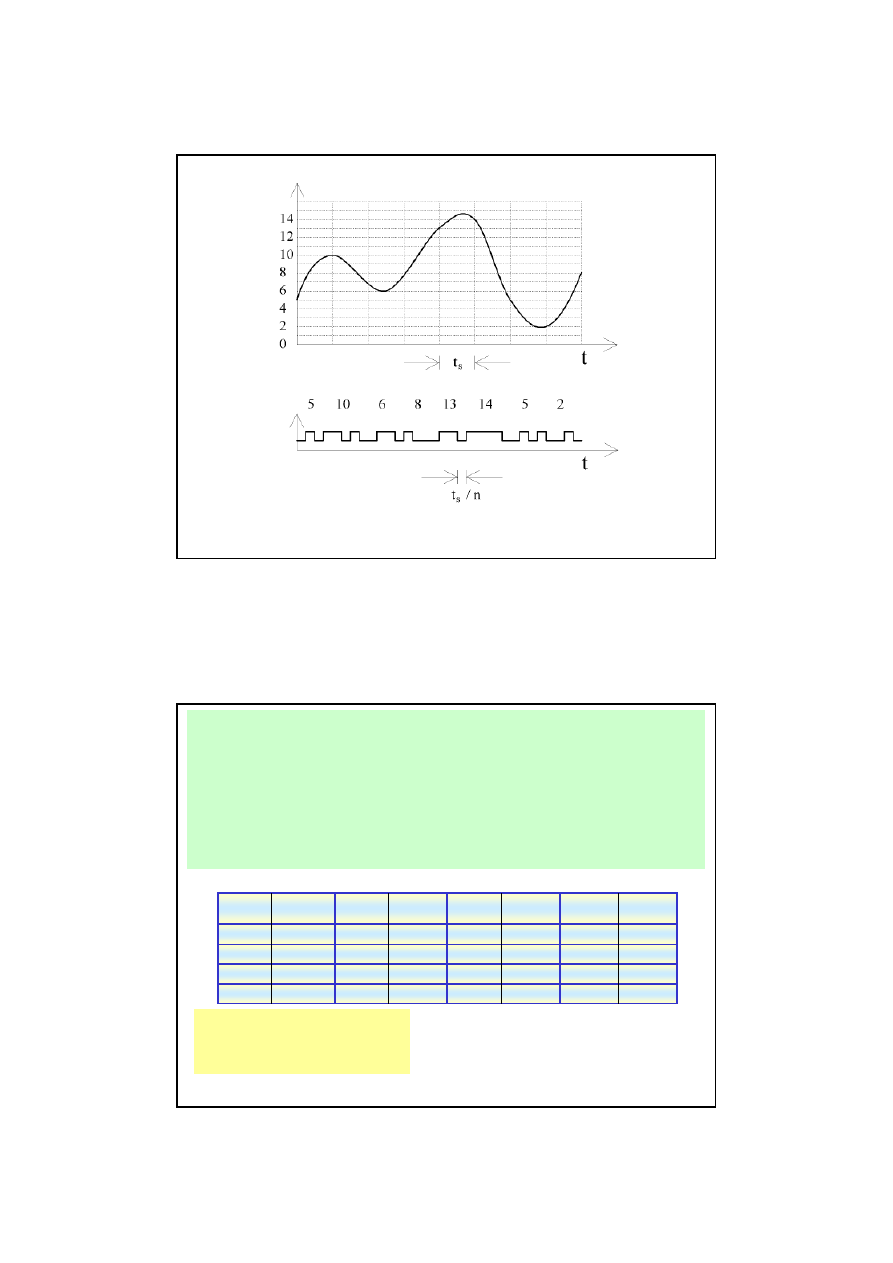
Przetwarzanie analogowo-cyfrowe (A/C) sygnału
analogowy
cyfrowy
t
s
– okres próbkowania
n - liczba bitów
Zapis bitowy, bajtowy i heksadecymalny
W technice cyfrowej najcz
ęś
ciej nie pracuje si
ę
z najmniejszymi mo
ż
liwymi wielko
ś
ciami
(bitami), ale prawie wył
ą
cznie z 8 bitowymi, tzn. byte (bajty). Dlatego te
ż
wielko
ś
ci 8-, 16-, lub
32-bitowe s
ą
okre
ś
lane jako 1-, 2-, lub 4-byte’owe.
1 byte = 8 bit
Binarny sposób zapisu z zerami i jedynkami dla du
ż
ych zakresów warto
ś
ci staje si
ę
bardzo
szybko nieprzejrzysty, jak np. 2-byte’owej zmiennej: 01101001 00001101.
Dlatego te
ż
dla uzyskania tej przejrzysto
ś
ci wprowadzony został zapis heksadecymalny
(16-kowy). W tym systemie liczbowym ka
ż
dy znak mo
ż
e przyjmowa
ć
16 ró
ż
nych warto
ś
ci: 0...9
i A...F.
Binarny i heksadecymalny zapis wielko
ś
ci 4-bitowej
B
A
9
8
Heksade-
cymalnie
1111
1110
1101
1100
Binarnie
1011
1010
1001
1000
Binarnie
0011
0010
0001
0000
Binarnie
F
7
0111
3
E
6
0110
2
D
5
0101
1
C
4
0100
0
Heksade-
cymalnie
Heksade-
cymalnie
Binarnie
Heksade-
cymalnie
Przykład:
Przykład:
- zapis binarny: 01101001 00001101
- zapis heksadecymalny: 690D
8
Zalety techniki cyfrowej
Cyfrowe zobrazowanie i przetwarzanie (analogowych) informacji, w porównaniu ze zobrazowaniem analogowym, wydaje
si
ę
pocz
ą
tkowo rozwi
ą
zaniem wymagaj
ą
cym znacznych nakładów. Ka
ż
da wielko
ść
analogowa musi by
ć
w odpowiedni
sposób kodowana, aby mogła by
ć
zapisana w postaci wielu sygnałów binarnych. Jednak pozorne wady, które powstaj
ą
wskutek takiego post
ę
powania s
ą
w wielu obszarach zastosowa
ń
kompensowane przez takie zalety techniki cyfrowej
jak:
du
ż
a odporno
ść
na zakłócenia,
mo
ż
liwe proste zapami
ę
tywanie danych,
elastyczne dalsze przetwarzanie oraz
ró
ż
norodne mo
ż
liwo
ś
ci przesyłania (transmisji).
Wysoka odporno
ść
na zakłócenia. Podczas gdy sygnał (informacja) analogowy zmienia si
ę
wskutek ka
ż
dego zakłócenia
(tak
ż
e małego), to cyfrowo zakodowana informacja zostanie dopiero wtedy zafałszowana, je
ż
eli impuls zakłócaj
ą
cy jest
wi
ę
kszy ni
ż
odst
ę
p zakłóce
ń
ka
ż
dorazowego poziomu cyfrowego. Odst
ę
p sygnału od zakłóce
ń
uzyskuje si
ę
z ró
ż
nicy
poziomu nadawania i odbierania. Okre
ś
la on, jak du
ż
e musz
ą
by
ć
indukcyjnie lub pojemno
ś
ciowo sprz
ę
gane zakłócenia
(oscylacje napi
ę
cia sieci, piki z zał
ą
cze
ń
), lub wahania napi
ę
cia zasilania, aby sygnał cyfrowy został zakłócony.
Mo
ż
liwo
ść
krótkotrwałego i długotrwałego zapami
ę
tywania. Dane cyfrowe mog
ą
by
ć
w bardzo prosty sposób
zapami
ę
tywane na ró
ż
nych, cz
ę
sto bardzo tanich mediach. Mo
ż
e si
ę
to odbywa
ć
krótkotrwale za pomoc
ą
ulotnych pami
ę
ci
półprzewodnikowych RAM (ang. Random Access Memory), albo długotrwałe za pomoc
ą
magnetycznych lub optycznych
mediów.
Elastyczno
ść
i dalsze przetwarzanie. Sterowane programowo przetwarzanie danych za pomoc
ą
mikroprocesorów
umo
ż
liwia to,
ż
e nawet bardzo zło
ż
one algorytmy – z du
ż
ym stopniem elastyczno
ś
ci - mog
ą
by
ć
wykonywane (obliczane)
w krótkim czasie.
Ró
ż
norodne mo
ż
liwo
ś
ci transmisji. Oba stany sygnału binarnego (tzn. 0 i 1) daj
ą
si
ę
bardzo prosto w ró
ż
ny sposób
kodowa
ć
. Ta mo
ż
liwo
ść
otwiera szerokie spektrum zastosowa
ń
. I tak np. przy transmisji danych na du
ż
e odległo
ś
ci, ze
wzgl
ę
du na małe zapotrzebowanie mocy (energii) i du
żą
odporno
ść
na zakłócenia s
ą
cz
ę
sto stosowane
ś
wiatłowody.
Sygnałom binarnym mo
ż
na bezpo
ś
rednio przyporz
ą
dkowa
ć
stany ZAŁ/WYŁ sygnału
ś
wietlnego, natomiast sygnał
analogowy daje si
ę
przesyła
ć
przez
ś
wiatłowód tylko z zastosowaniem wymagaj
ą
cej du
ż
ych nakładów linearyzacji
i wnosz
ą
cej bł
ę
dy ocenie intensywno
ś
ci.
Odst
ę
p sygnału cyfrowego od zakłóce
ń
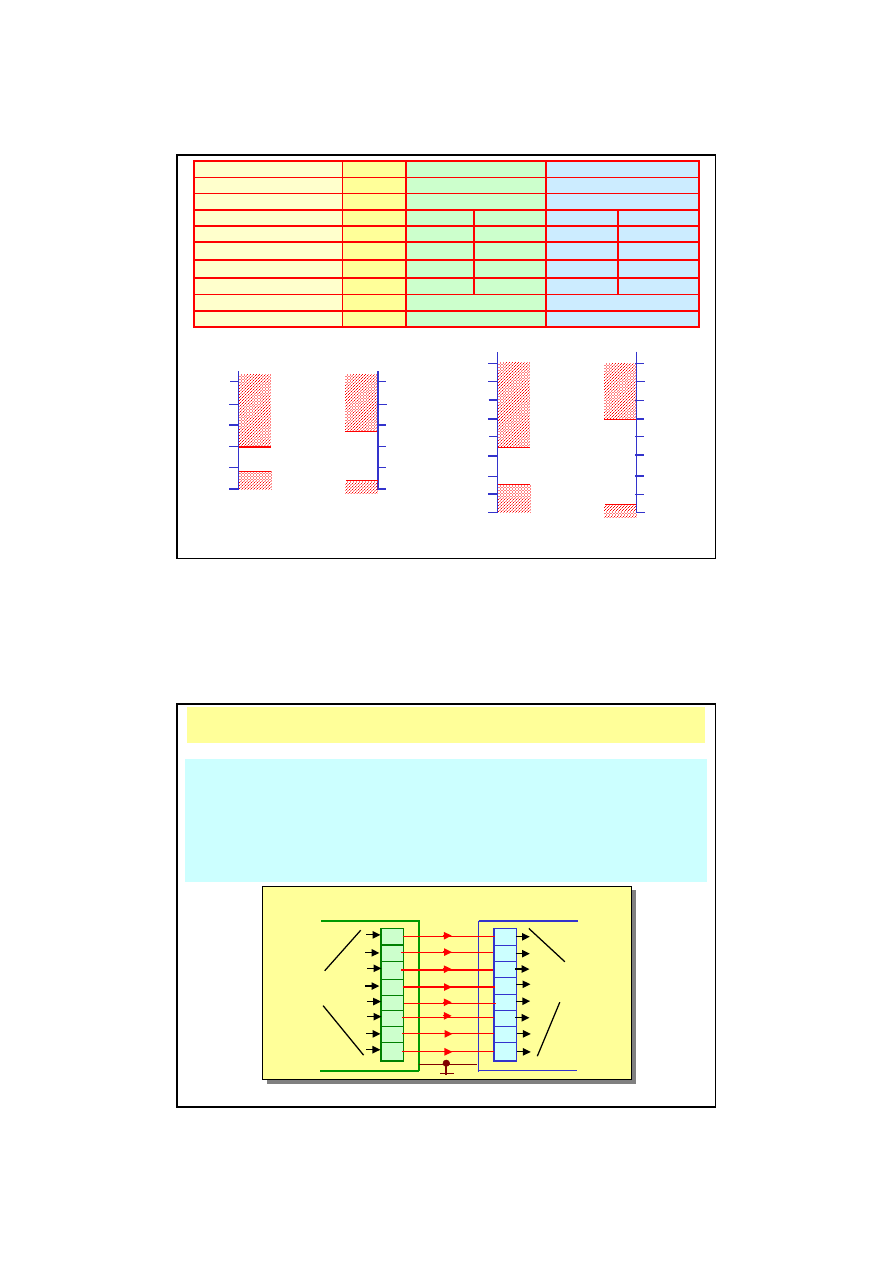
Poziom sygnałów układu TTL
Poziom sygnałów układu TTL
-
-
LS
LS
Poziom niski (L, LOW):
- gwarantowany poziom nadawania:
max. 0,5 V
- gwarantowany poziom odbierania:
max. 0,8 V
- statyczny odst
ę
p od zakłóce
ń
:
0,3 V
Poziom wysoki (H, HIGH):
- gwarantowany poziom nadawania:
min. 2,7 V
- gwarantowany poziom odbierania:
min. 2,0 V
- statyczny odst
ę
p od zakłóce
ń
:
0,7 V
9
0,1 mW
8 mW
Aktywny pobór pr
ą
du
10 MHz
33 MHz
Maks. cz
ę
stotliwo
ść
zał
ą
czania
-0,02 mA
0,0001 mA
-0,4 mA
0,02 mA
Pr
ą
d
4,95 V
3,5 V
2,7 V
2,0 V
Napi
ę
cie
Stan 1 (High)
0,5 mA
-0,0001 mA
8 mA
-0,4 mA
Pr
ą
d
0,05 V
1,5 V
0,5 V
0,8 V
Napi
ę
cie
Stan 0 (Low)
Wyj
ś
cie
Wej
ś
cie
Wyj
ś
cie
Wej
ś
cie
-0,02 mA
-100 mA
Maksymalny pr
ą
d
5 - 15 V
4,75 - 5,25 V
Napi
ę
cie zasilania
CMOS
TTL
Ogólne własno
ś
ci układów TTL i CMOS
Napi
ę
cie wej
ś
ciowe
1
0
2
3
4
5
[V]
Masa
Low
Low
High
High
Napi
ę
cie wyj
ś
ciowe
1
0
2
3
4
5
[V]
Masa
Low
Low
High
High
TTL
TTL
Napi
ę
cie wej
ś
ciowe
1
0
2
3
4
5
[V]
Masa
Low
Low
High
High
Napi
ę
cie wyj
ś
ciowe
1
0
2
3
4
5
[V]
Masa
Low
Low
High
High
CMOS
CMOS
6
7
8
6
7
8
TTL (ang.Transistor-Transistor Logic)
CMOS (ang. Complementary Metal Oxide Semiconductor)
Transmisja równoległa sygnałów cyfrowych
Transmisja sygnałów cyfrowych pomi
ę
dzy dwoma lub wieloma urz
ą
dzeniami lub uczestnikami
(stacjami, w
ę
złami) komunikacyjnymi mo
ż
e si
ę
odbywa
ć
albo równolegle albo szeregowo.
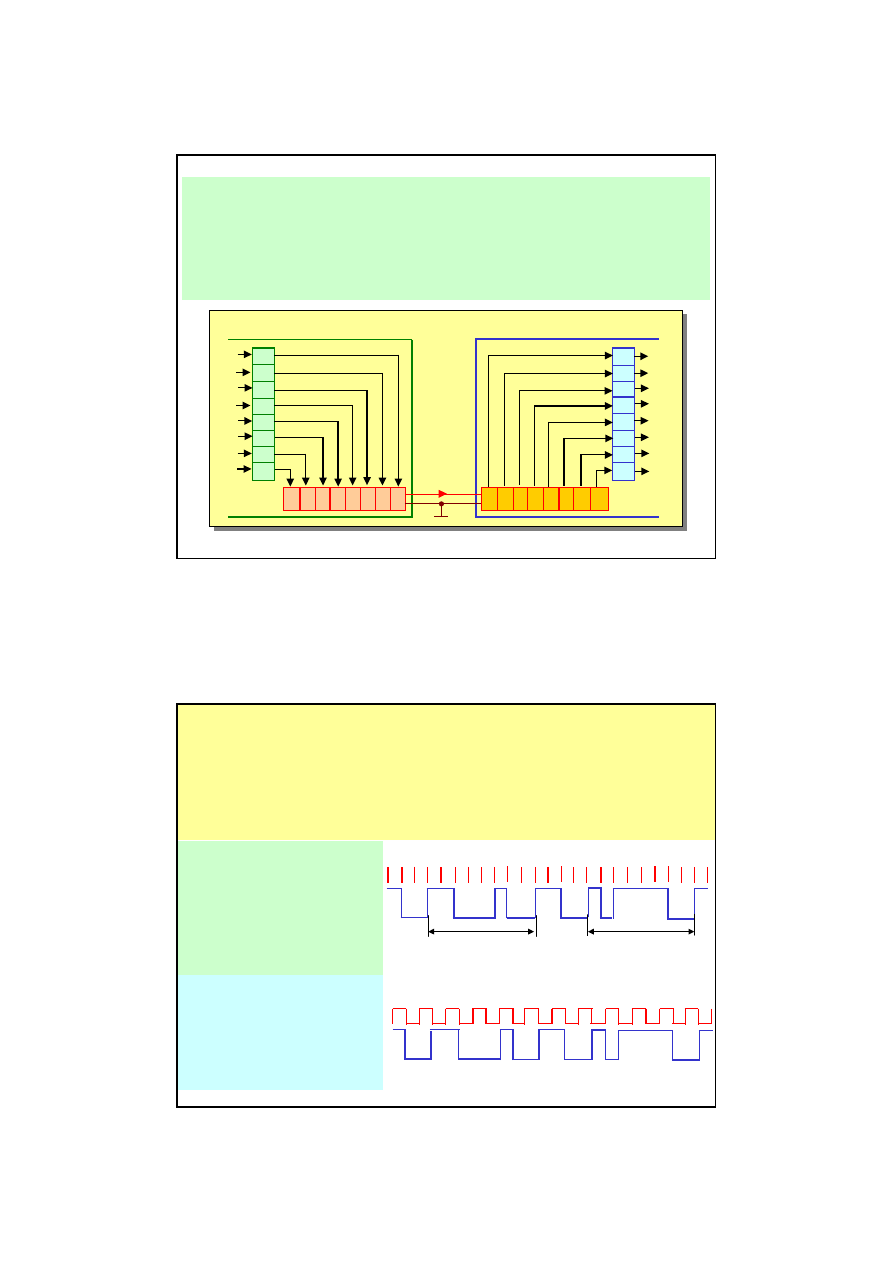
Transmisja równoległa
W transmisji równoległej wszystkie bity okre
ś
lonej informacji (danych) s
ą
przenoszone
równocze
ś
nie, tzn. równolegle przez odpowiedni
ą
liczb
ę
przewodów danych (magistral
ę
).
Nakłady instalacyjne s
ą
tutaj odpowiednio wysokie i do zaakceptowania tylko w przypadkach
krótkich dróg (odległo
ś
ci) transmisji. Do transmisji jednego bajta (tzn. 8-bitów) pomi
ę
dzy stacj
ą
nadawcz
ą
i odbiorcz
ą
wymagane jest minimum 9 przewodów (8 bitów i potencjał odniesienia).
Dlatego te
ż
ta technika jest stosowana prawie wył
ą
cznie w magistralach urz
ą
dze
ń
. S
ą
tutaj –
przy krótkich poł
ą
czeniach – bez zaawansowanych metod przetwarzania uzyskiwane wysokie
szybko
ś
ci transmisji.
1.
2.
3.
4.
5.
6.
7.
8
.
1.
2.
3.
4.
5.
6.
7.
8.
9 przewodów
Nadajnik
Nadajnik
Odbiornik
Odbiornik
Znak
Znak
8
8
-
-
bitowy
bitowy
Znak
Znak
8
8
-
-
bitowy
bitowy
10
Transmisja szeregowa
W przypadku du
ż
ych odległo
ś
ci zalecana jest transmisja szeregowa, w której tylko przez jeden
przewód danych poszczególne bity s
ą
kolejno przenoszone (transmitowane) w czasie. Chocia
ż
ten sposób transmisji informacji jest zwi
ą
zany z odpowiednio wi
ę
kszymi nakładami czasu, to ze
wzgl
ę
du na znacznie mniejsze nakłady instalacyjne i koszty jest on cz
ę
sto stosowany. Poniewa
ż
wszystkie informacje (bity) musz
ą
by
ć
tworzone co najmniej równolegle, to nadajnik musi
realizowa
ć
równoległo-szeregowe, a odbiornik szeregowo-równoległe przetwarzanie danych. Te
funkcje s
ą
realizowane przez specjalnie wł
ą
czone rejestry przesuwne, które s
ą
ju
ż
zintegrowane
w dost
ę
pnych na rynku mikrokontrolerach i modułach komunikacyjnych.
2 przewody
Nadajnik
Nadajnik
Odbiornik
Odbiornik
Z
n
a
k
8
Z
n
a
k
8
-
-
b
it
o
w
y
b
it
o
w
y
Z
n
a
k
8
Z
n
a
k
8
-
-
b
it
o
w
y
b
it
o
w
y
1.
2.
3.
4.
5.
6.
7.
8
.
1.
2.
3.
4.
5.
6.
7.
8.
8. 7. 6. 5. 4. 3. 2. 1.
1. 2. 3. 4. 5. 6. 7. 8.
8, 7, 6, 5,
4, 3, 2, 1
Transmisja szeregowa sygnałów cyfrowych
Istniej
ą
zatem dwa mo
ż
liwe rodzaje transmisji danych:
Transmisja szeregowa polega na przesłaniu sekwencyjnym (bit po bicie) danych. Urz
ą
dzeniem transmisji
szeregowej jest np. modem. Dane s
ą
przesyłane za pomoc
ą
kabla szeregowego (np. RS-232) ł
ą
cz
ą
cego np.
komputer z modemem, a stamt
ą
d, po modulacji bit po bicie s
ą
przesyłane do sieci telefonicznej.
Transmisja równoległa polega na jednoczesnym przesyłaniu wi
ę
kszej liczby bitów informacji (przewa
ż
nie
o
ś
miu, czyli jednego bajtu). Przykładem tego rozwi
ą
zania jest transmisja znaków do drukarki za pomoc
ą
kabla
typu Centronics.
Szybko
ść
transmisji okre
ś
la natomiast liczb
ę
bitów przesyłanych w jednostce czasu. Jednostk
ą
szybko
ś
ci
transmisji jest bit na sekund
ę
(bit/s) lub bps (z ang. bit per sek.)
Natomiast podczas transmisji
synchronicznej, dzi
ę
ki okre
ś
lonemu
impulsowi taktuj
ą
cemu, utrzymywane jest
stałe tempo przekazywania informacji. Nie
wyst
ę
puj
ą
tutaj przerwy spowodowane
konieczno
ś
ci
ą
synchronizacji
pojedynczych porcji informacji, a wi
ę
c
uzyskuje si
ę
lepsze wykorzystanie linii
ł
ą
cz
ą
cych.
Rozró
ż
niamy dwie metody transmisji
danych: asynchroniczn
ą
i synchroniczn
ą
.
Podczas transmisji asynchronicznej
wyst
ę
puj
ą
kolejno po sobie wycinki czasu
zawieraj
ą
ce i nie zawieraj
ą
ce informacji.
Aby przygotowa
ć
odbiorc
ę
na przyj
ę
cie
sygnału zawieraj
ą
cego informacje, s
ą
wysyłane sygnały startu oraz sygnały
stopu, rozpoczynaj
ą
ce i ko
ń
cz
ą
ce
przesyłanie porcji informacji.
Cyfrowa transmisja danych
Sygnał
startu
Sygnał
startu
Sygnał
stopu
Porcja
informacji
Porcja
informacji
Transmisja asynchroniczna
Sygnał taktuj
ą
cy
Dane
Transmisja synchroniczna
11
Metody rozpoznawania bł
ę
dów transmisji danych
Transmisja danych cyfrowych z jednego miejsca do drugiego mo
ż
e spowodowa
ć
powstanie
bł
ę
dów. Mog
ą
one wynika
ć
z tego,
ż
e odbiornik z powodu działania zakłóce
ń
sygnałów
elektrycznych podczas transmisji nie odbiera tego samego sygnału, który został wysłany
przez nadajnik. Impuls zakłócaj
ą
cy mo
ż
e niekiedy w okre
ś
lonym punkcie by
ć
wystarczaj
ą
co
du
ż
y,
ż
eby spowodowa
ć
zmian
ę
logicznego poziomu sygnału. I tak np. wysłany ci
ą
g 1001
bitów mo
ż
e by
ć
odebrany jako 1101. Aby rozpozna
ć
tego rodzaju bł
ę
dy, cz
ę
sto stosowany
jest bit parzysto
ś
ci. Bit parzysto
ś
ci jest dodatkowym bitem 0 lub 1, który jest
przyporz
ą
dkowywany jednej grupie kodowej. W prostej metodzie parzysto
ś
ci warto
ść
tego
bitu jest dobierana w taki sposób,
ż
eby całkowita liczba jedynek w grupie kodowej, ł
ą
cznie
z bitem parzysto
ś
ci, była liczb
ą
parzyst
ą
. I tak np. podczas transmisji 1001 bit parzysto
ś
ci
wynosi 0, a w wyniku otrzymuje si
ę
01001 i tym samym liczba jedynek jest parzysta. Podczas
transmisji 1101 warto
ść
bitu parzysto
ś
ci wynosi 1, a wynik 11101 i tym samym ł
ą
czna liczba
jedynek jest parzysta.
W przypadku zastosowania nieparzysto
ś
ci, warto
ść
bitu parzysto
ś
ci jest dobierana w taki
sposób,
ż
eby całkowita liczba jedynek, ł
ą
cznie z bitem parzysto
ś
ci, była liczb
ą
nieparzyst
ą
.
Je
ż
eli w odbiorniku liczba jedynek w grupie kodowej nie daje wymaganej parzysto
ś
ci, to
odbiornik rozpoznaje,
ż
e wyst
ą
pił bł
ą
d i mo
ż
e za
żą
da
ć
ponownej transmisji.
Rozszerzeniem kontroli parzysto
ś
ci jest suma kontrolna, w której bloki kodowe mog
ą
by
ć
sprawdzane w taki sposób,
ż
e transmitowanych jest szereg bitów, które tworz
ą
sum
ę
binarn
ą
. Sprawdzanie parzysto
ś
ci i sumy kontrolnej pozwala tylko na rozpoznanie
pojedynczych bł
ę
dów w kodowanych blokach, natomiast podwójne bł
ę
dy nie s
ą
wykrywane.
Dlatego te
ż
konieczny jest rozwój i zastosowanie innych metod wykrywania i usuwania
bł
ę
dów transmisji.
Istnieje wiele metod rozpoznawania bł
ę
dów w systemach pomiarowych, sterowania i komunikacyjnych (transmisji
danych):
Kontrola powtórzenia – ta metoda polega na kopiowaniu wzgl. powtórzeniu działania i porównaniu wyników.
Je
ż
eli nie wyst
ą
pi bł
ą
d, to przyjmuje si
ę
,
ż
e wyniki powinny by
ć
jednakowe. W przypadku krótkotrwałych bł
ę
dów
mo
ż
e to oznacza
ć
,
ż
e przebieg musi by
ć
dwukrotnie powtórzony i porównane wyniki, albo te
ż
zastosowane dwa
układy i porównane wyniki obu tych układów. Jednak jest to rozwi
ą
zanie kosztowne.
Sprawdzanie warto
ś
ci oczekiwanej – bł
ę
dy programowe s
ą
cz
ę
sto wykrywane wówczas, gdy nast
ą
pi
sprawdzenie, czy przy wprowadzaniu okre
ś
lonej danej numerycznej uzyskiwana jest warto
ść
oczekiwana. Je
ż
eli
nie uzyskuje si
ę
oczekiwanej warto
ś
ci, to stwierdza si
ę
bł
ą
d.
Sprawdzanie czasu – w tej metodzie sprawdza si
ę
, czy w
ś
ci
ś
le okre
ś
lonym czasie została wykonana
przewidziana funkcja. Tego rodzaju kontrol
ę
nazywa si
ę
zwykle nadzorowaniem czasu przebiegu (ang. Watchdog
Timer). I tak np. w sterownikach PLC na pocz
ą
tku operacji (cyklu) uruchamiany jest zegar (ang. Timer) i je
ż
eli
operacja nie zostanie zako
ń
czona w przeci
ą
gu zadanego czasu, to przyjmuje si
ę
,
ż
e wyst
ą
pił bł
ą
d. Wówczas
Watchdog Timer reaguje w ten sposób,
ż
e powoduje wywołanie alarmu i wył
ą
czenie całej instalacji lub jej cz
ęś
ci.
Kontrola zwracania. Je
ż
eli istnieje bezpo
ś
rednia relacja pomi
ę
dzy warto
ś
ciami wej
ś
ciowymi i wyj
ś
ciowymi, to przy
pomocy warto
ś
ci wyj
ś
ciowej mo
ż
na obliczy
ć
warto
ść
wej
ś
ciow
ą
, która spowodowała t
ą
warto
ść
wyj
ś
ciow
ą
.
Nast
ę
pnie otrzyman
ą
warto
ść
mo
ż
na porówna
ć
z warto
ś
ci
ą
wej
ś
ciow
ą
.
Kontrola parzysto
ś
ci i rozpoznawanie bł
ę
dów – te metody sprawdzania s
ą
cz
ę
sto stosowane do stwierdzania
bł
ę
dów pami
ę
ci i transmisji danych. Kanały komunikacyjne s
ą
cz
ę
sto nara
ż
one na zakłócenia, które mog
ą
wpływa
ć
na bł
ę
dy nadawania. Aby stwierdzi
ć
, czy dane nie zostały zafałszowane, do przenoszonych danych jest wstawiany
bit parzysto
ś
ci. Bit parzysto
ś
ci jest dobierany w taki sposób,
ż
eby suma jedynek w grupie była parzysta
(sprawdzanie parzysto
ś
ci) lub nieparzysta (sprawdzanie nieparzysto
ś
ci). W przypadku nieparzysto
ś
ci mo
ż
na po
transmisji sprawdzi
ć
słowo, aby stwierdzi
ć
czy jest ono ci
ą
gle jeszcze nieparzyste. Inne metody kontroli zawieraj
ą
kody, na których opiera si
ę
transmisja danych, aby rozpozna
ć
zafałszowane bity.
Kontrola diagnostyczna – jest stosowana do sprawdzania przebiegu (zachowania si
ę
) składowych systemu. Do
składnika wprowadzane s
ą
wielko
ś
ci wej
ś
ciowe, a uzyskiwane wielko
ś
ci wyj
ś
ciowe s
ą
porównywane z
oczekiwanymi wynikami.
Metody rozpoznawania bł
ę
dów danych
12
Interfejsy komputerowe
Istniej
ą
ró
ż
ne mo
ż
liwo
ś
ci przył
ą
czenia (interfejs) urz
ą
dze
ń
automatyki. W wielu systemach automatyzacji
stosowane s
ą
rozwi
ą
zania zapewniaj
ą
ce integracj
ę
przepływu informacji z wykorzystaniem sieci
komunikacyjnych (np. Ethernet). W poszczególnych urz
ą
dzeniach lub małych modułach, a tak
ż
e
programowaniu i piel
ę
gnacji, w zale
ż
no
ś
ci od realizowanych zada
ń
, s
ą
stosowane równie
ż
inne rodzaje
interfejsów (magistral, sieci).
Magistrala PCI jest systemem ł
ą
cz
ą
cym moduły wewn
ą
trz komputera PC. Z jej pomoc
ą
pracuj
ą
wbudowane
w komputer urz
ą
dzenia (karty).
Interfejs sieciowy Ethernet umo
ż
liwia przył
ą
czenie dowolnie wielu urz
ą
dze
ń
przy pomocy standardowych
metod. W du
ż
ych, silnie obci
ąż
onych sieciach nie mo
ż
na zapewni
ć
okre
ś
lonego czasu transmisji.
Interfejs szeregowy (V.24, RS 232, COM) jest ju
ż
nieco przestarzałym, ale bardzo rozpowszechnionym
interfejsem, którego nie mo
ż
e ignorowa
ć
ż
aden u
ż
ytkownik.
Szeregowy interfejs RS-485 jest prosty, odporny na zakłócenia i uniwersalny w zastosowaniach. Tworzy on
podstaw
ę
wszystkich systemów sieci miejscowych (ang. Fieldbus), ale niestety nie jest standardowo
przewidziany prawie w
ż
adnym komputerze. Pracuje on z przetwornikiem interfejsu.
USB (ang. Universal Serial Bus) jest wielostronny, szybki i samo-konfiguruj
ą
cy si
ę
, tak
ż
e nadaje si
ę
on
szczególnie dobrze dla ci
ą
gle wymienianych urz
ą
dze
ń
.
Firewire (iLink, IEEE 1392) jest odpowiedni szczególnie dla szybkich aplikacji (video, przetwarzanie obrazów,
szybkie pomiary).
Karta PC jest wsuwana w odpowiednie gniazdo (zł
ą
cze) komputera. W takiej karcie mo
ż
e si
ę
znajdowa
ć
cała
elektronika urz
ą
dzenia (np. modem, przetwornik A/C).
Magistrala IEC (GPIB, IEC-625, IEEE-488) znajduje zastosowanie przede wszystkim w laboratoryjnej technice
pomiarowej. Dysponuje ona takimi funkcjami, które ułatwiaj
ą
sterowanie urz
ą
dzeniami pomiarowymi (Trigger,
wywoływanie u
ż
ytkownika, globalne informacje).
Interfejs na
ś
wiatło podczerwone IrDa umo
ż
liwia prac
ę
bezprzewodow
ą
na małe odległo
ś
ci. Jest on stosowany
cz
ę
sto w przeno
ś
nych urz
ą
dzeniach do programowania i testowania.
Nieczuły na
zakłócenia,
bardzo szybki
Nieczuły na
zakłócenia,
z magistral
ą
,
niezawodna
transmisja danych
Nieczuły na
zakłócenia,
z magistral
ą
,
niezawodna
transmisja danych
Nieczuły na
zakłócenia,
z magistral
ą
,
niezawodna
transmisja danych
Nieczuły na
zakłócenia,
z magistral
ą
,
niezawodna
transmisja danych
Własno
ś
ci
Urz
ą
dzenia
peryferyjne PC
Urz
ą
dzenia
peryferyjne PC.
Sieci Fieldbus
w automatyzacji
Urz
ą
dzenia
peryferyjne PC i
do automatyzacji
Urz
ą
dzenia
peryferyjne PC i
do automatyzacji
Urz
ą
dzenia
pomiarowe
Zastosowania
2 Mbit/s
10 Mbit/s
19,2 kbit/s
19,2 kbit/s
Maksymalna
szybko
ść
transmisji
Nadajnik/odbiornik
Nadajnik/ odbiornik
1/15
1/10
1/1
1/1
Liczba uczestników
dla interfejsu
16:
8 - dane,
3 - Handschake,
5 - kontrola
2 (3):
2 - dane,
1 - masa
4 (5):
2 - nadawanie,
2 - odbieranie
(1- masa)
Min. 3:
2 - dane,
1 - masa
4
Liczba przewodów
2 m ... 30 m
1200 m
1200 m
30 m
1000 m
Maksymalna długo
ść
przewodów
Asynchroniczna,
pełny duplex
Asynchroniczna,
pełny duplex
Asynchroniczna,
pełny duplex
Asynchroniczna,
pełny duplex
Asynchroniczna,
pełny duplex
Mo
ż
liwe rodzaje
transmisji
+5 V/ - 5 V
+5 V/ - 5 V
+15 V/ -15 V
Stany sygnału 0/ 1
5 V/ 0 V
+3 V .../ -3 V
+3 V .../ -3 V
+3 V .../ -3 V
20 mA/ 0 mA
IEEE488
RS485
RS422
RS232 (V.24)
TTY (20 mA)
Interfejs
równoległy
Interfejsy szeregowe
Własno
ś
ci standardowych interfejsów
13
Rozwój cyfrowych układów scalonych
Wzrost stopnia integracji układów scalonych
-
> 10
5
ULSI
1990 -
Kompletne układy mikroprocesorowe, układy
specjalne
< 10
5
VLSI
1980 -
Mikroprocesor, pami
ę
ci RAM, ROM
300 - 3000
LSI
1970 - 1980
Liczniki, sumatory, . . .
30 - 300
MSI
1966 - 1970
Bramki, przerzutniki, . . .
3 - 30
SSI
1960 - 1965
Lampy elektronowe/ przeka
ź
niki/ tranzystory
-
dyskretna
1940 - 1960
Zespół, moduł, wyrób
Stopie
ń
integracji
(bramek/ chip)
Technika
Okres czasu
(rok)
Generacje układów i g
ę
sto
ść
upakowania
10
2
... 10
7
-
Układy scalone o du
ż
ej skali integracji
10 ... 10
5
Płytki, poł
ą
czenia na chip’ie
Proste układy scalone
10
-1
... 10
Płytki, dyskretne
Tranzystor
10
-3
... 10
-1
Chassis, dyskretne
Lampy elektronowe, przeka
ź
niki
Ilo
ść
elementów/cm
3
Wykonanie
Układ (element)
Układ scalony małej skali integracji
SSI (ang. small scale of integration)
Układ scalony
ś
redniej skali integracji
MSI (ang. medium scale of integration
)
Układ scalony du
ż
ej skali integracji
LSI (ang. large scale of integration)
Układ scalony wielkiej skali integracji
VLSI (ang. very large scale of integration)
Układ scalony ultrawielkiej skali integracji
ULSI (ang. ultra large scale of integration)
Pomiar sygnałów
Wielko
ś
ci charakterystyczne układów pomiarowych
Sygnały elektryczne z elementów czujnikowych (sensorów) s
ą
dostarczane dalej do urz
ą
dze
ń
przetwarzaj
ą
cych (sterowników, regulatorów, komputerów itp.), lub te
ż
przekazywane jako dane np.
przez sie
ć
komunikacyjn
ą
. W zale
ż
no
ś
ci od rodzaju sygnałów rozró
ż
nia si
ę
wej
ś
cia urz
ą
dze
ń
:
• wej
ś
cia analogowe,
• wej
ś
cia cyfrowe (w tym binarne),
• wej
ś
cia licznikowe lub wej
ś
cia impulsowe.
Wej
ś
cia analogowe
Oprócz mierzonej wielko
ś
ci (napi
ę
cie, pr
ą
d, oporno
ść
, ładunek, pojemno
ść
) nale
ż
y równie
ż
uwzgl
ę
dni
ć
mo
ż
liwe zakresy pomiarowe, oporno
ść
wewn
ę
trzn
ą
(własn
ą
), czuło
ść
, rozdzielczo
ść
i dokładno
ść
. Je
ż
eli stosowane s
ą
czujniki z jednostk
ą
przetwarzaj
ą
c
ą
, to uzyskiwane sygnały
standardowe mo
ż
na wykorzysta
ć
w ró
ż
nych urz
ą
dzeniach.
Wej
ś
cia cyfrowe
Sygnały cyfrowe s
ą
opisywane ich szeroko
ś
ci
ą
(= liczba bitów) i poziomem sygnału (0V/ +10V, TTL,
CMOS, +/-12V). Za pomoc
ą
jednego bita mo
ż
na np. okre
ś
li
ć
stan przeł
ą
cznika (inicjatora). Je
ż
eli
wej
ś
cie jest zorganizowane w byte (= 8 bit), to warto
ść
sygnału przekazywana jest najcz
ęś
ciej jako
liczba dziesi
ę
tna lub heksadecymalna..
Wej
ś
cia impulsowe
Jako impuls okre
ś
la si
ę
krótkotrwał
ą
zmian
ę
pomi
ę
dzy dwoma stanami poziomu sygnału (napi
ę
cia).
Wej
ś
cie impulsowe reaguje na tak
ą
zmian
ę
. Ka
ż
dy impuls nadaje (zmienia) warto
ść
liczbow
ą
wewn
ę
trznego licznika. Nale
ż
y uwzgl
ę
dni
ć
niezb
ę
dn
ą
szybko
ść
zmiany oraz to, czy licznik reaguje na
zbocza dodatnie (narastanie) sygnału czy na zbocza ujemne (spadek), jak równie
ż
maksymalnie
dopuszczaln
ą
cz
ę
stotliwo
ść
impulsów.
14
Komponenty
Poniewa
ż
sensory, aktuatory i procesory z oprogramowaniem przyczyniaj
ą
si
ę
do tego,
ż
e
z „czystego” układu mechanicznego tworzony jest system mechatroniczny, to s
ą
one okre
ś
lane jako
komponenty (składniki) mechatroniczne. Jednak nie zawsze wszystkie te komponenty musz
ą
by
ć
zawarte w systemie mechatronicznym.
Sensory (czujniki)
Wyraz „sensor” pochodzi od łaci
ń
skiego terminu „sensus” (czucie, wra
ż
liwo
ść
) i okre
ś
la technicznie
czujnik, którego zadaniem jest uzyskiwanie informacji. Sensory dostarczaj
ą
wa
ż
nych, mierzalnych
informacji o procesie i tym samym stanowi
ą
poł
ą
czenie z procesem do przetwarzania informacji.
Zadaniem sensorów w systemach mechatronicznych jest pomiar istotnych, opisuj
ą
cych system
fizycznych (nieelektrycznych) wielko
ś
ci mierzonych i przetwarzanie ich na sygnały elektryczne.
Uzyskiwane sygnały elektryczne pozostaj
ą
przy tym z wielko
ś
ciami mierzonymi w znanej,
najcz
ęś
ciej liniowej zale
ż
no
ś
ci. Ze wzgl
ę
du na szeroki zakres zastosowa
ń
sensorów, a szczególnie
ró
ż
norodno
ść
mierzonych wielko
ś
ci, s
ą
one klasyfikowane
.
Podstaw
ą
klasyfikacji s
ą
mierzone
wielko
ś
ci, zasady działania sensorów, technologie wytwarzania, postacie sygnału, a tak
ż
e koszty.
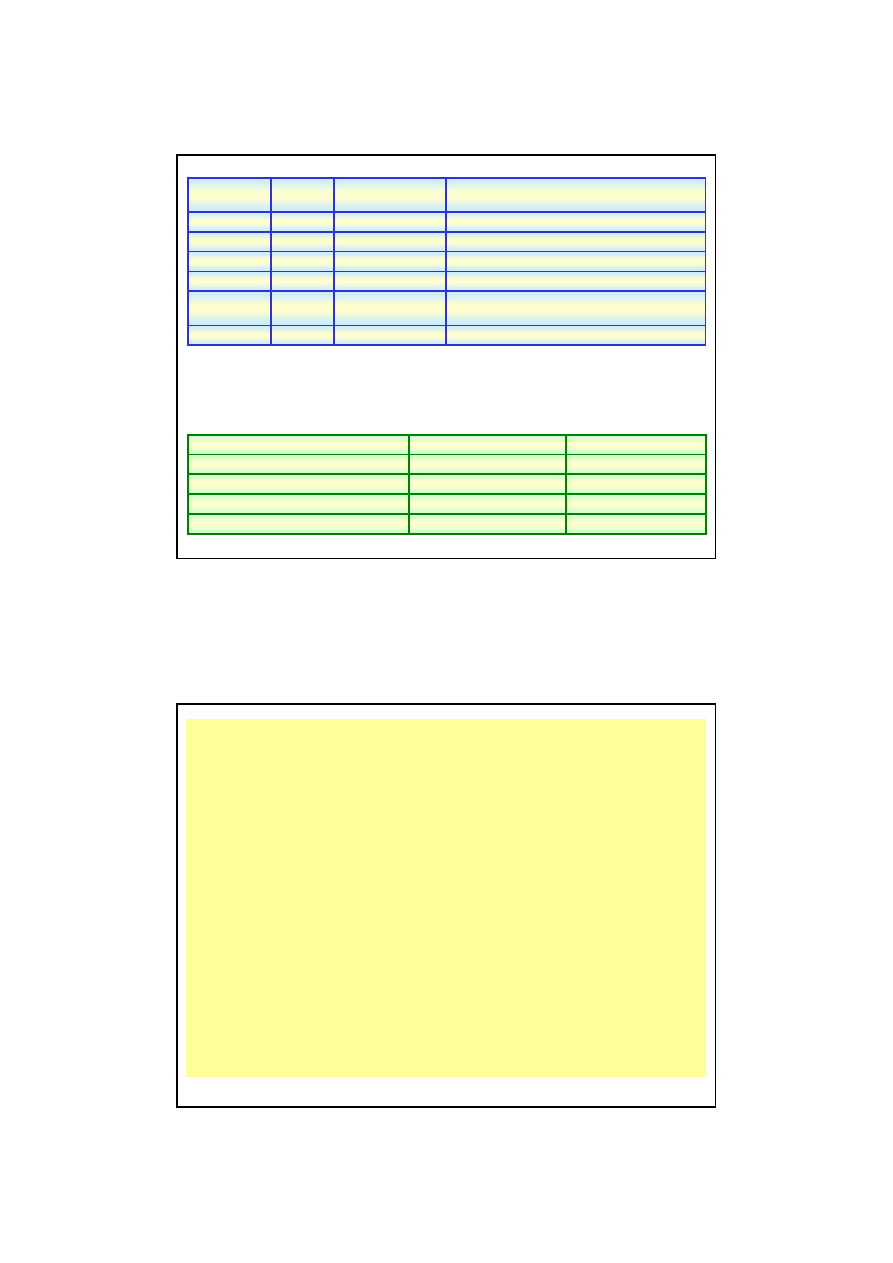
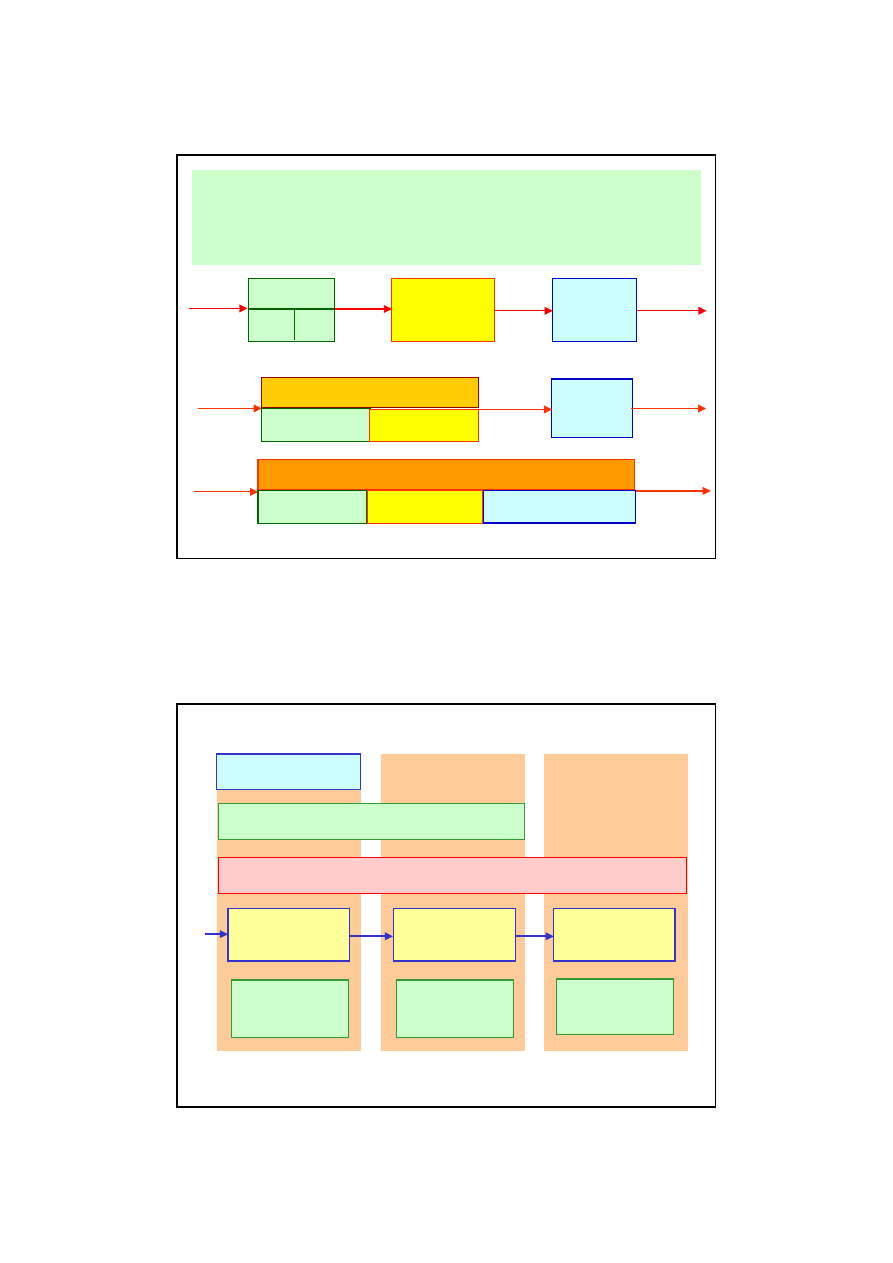
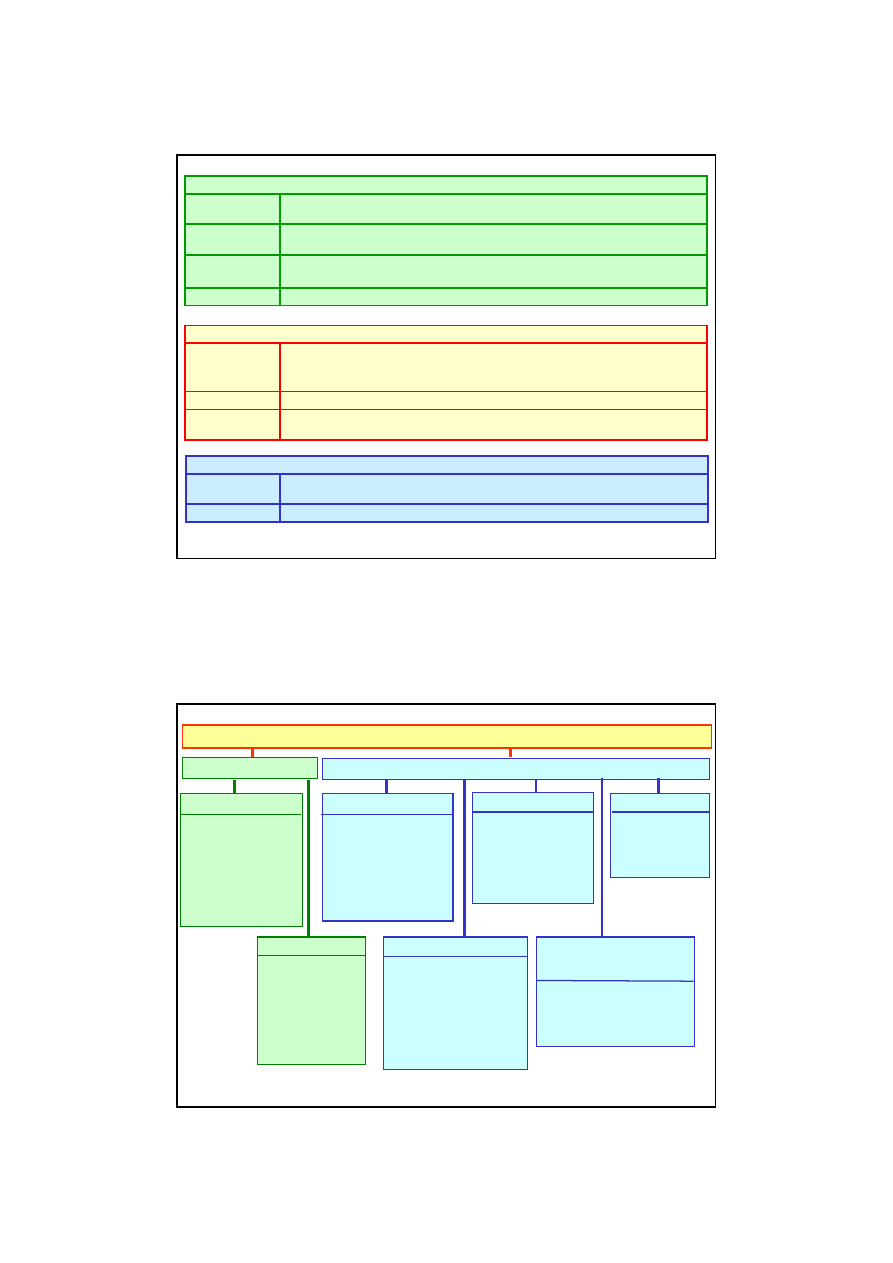
Komponenty systemów mechatronicznych - sensory
Sygnał
Sygnał
wyj
ś
ciowy
wyj
ś
ciowy
Sensor inteligentny
Sensor zintegrowany
Sensor elementarny (prosty)
Czujnik
Przetwornik
sygnału
Przetwarzanie
sygnału
Procesor z
przetwornikiem
A/C
Nieelektryczny
sygnał mierzony
Elektryczny
sygnał mierzony
Normowany
analogowy
sygnał mierzony
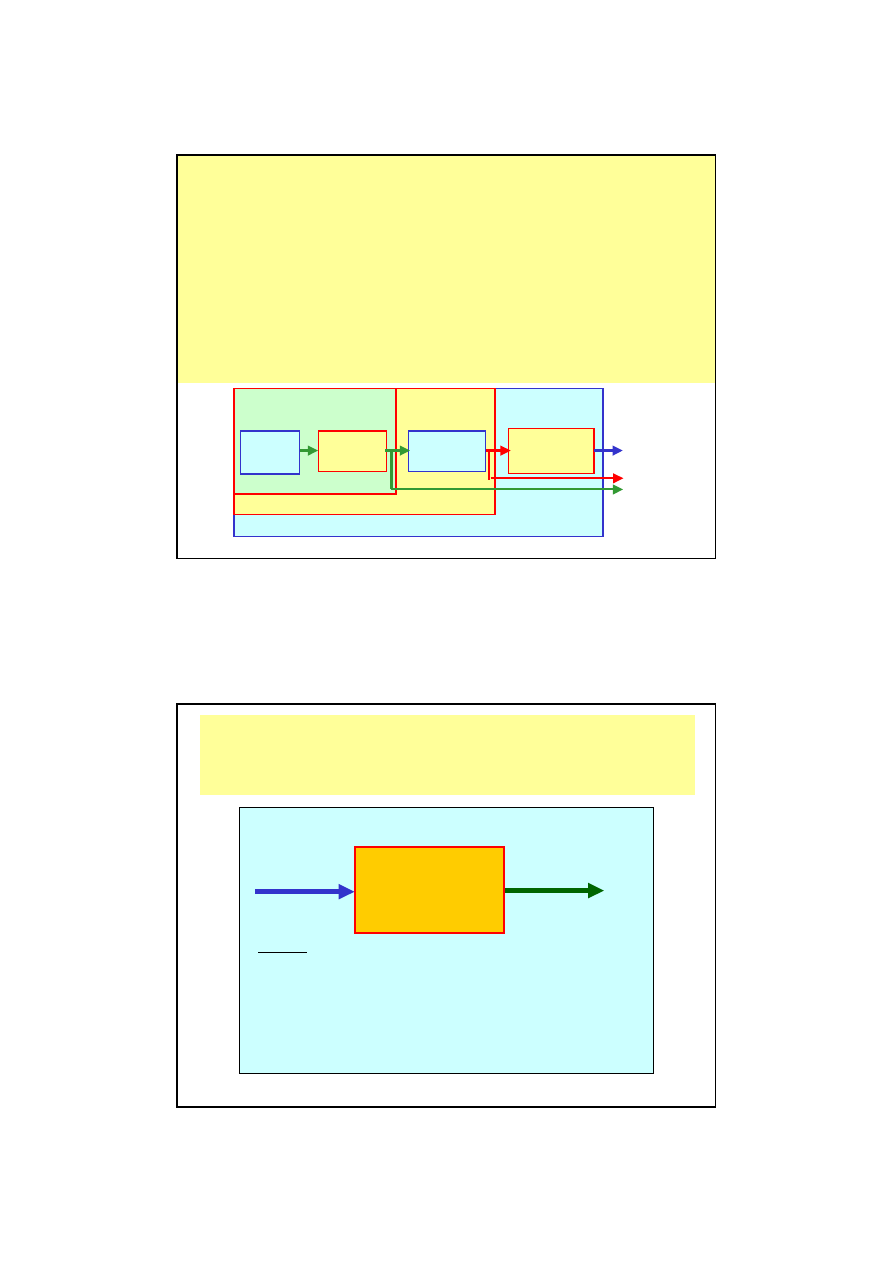
Czujnik (sensor) jest urz
ą
dzeniem, w którym wielko
ść
fizyczna na wej
ś
ciu oddziałuje na
elektryczn
ą
wielko
ść
na wyj
ś
ciu. Je
ż
eli pomi
ę
dzy wielko
ś
ciami fizycznymi i wielko
ś
ci
ą
elektryczn
ą
istnieje
ś
cisła relacja (zale
ż
no
ść
), to wtedy za pomoc
ą
sensora mo
ż
na
elektrycznie mierzy
ć
ró
ż
ne wielko
ś
ci fizyczne. Inne okre
ś
lenia czujnika to sensor,
przetwornik pomiarowy, dajnik sygnału.
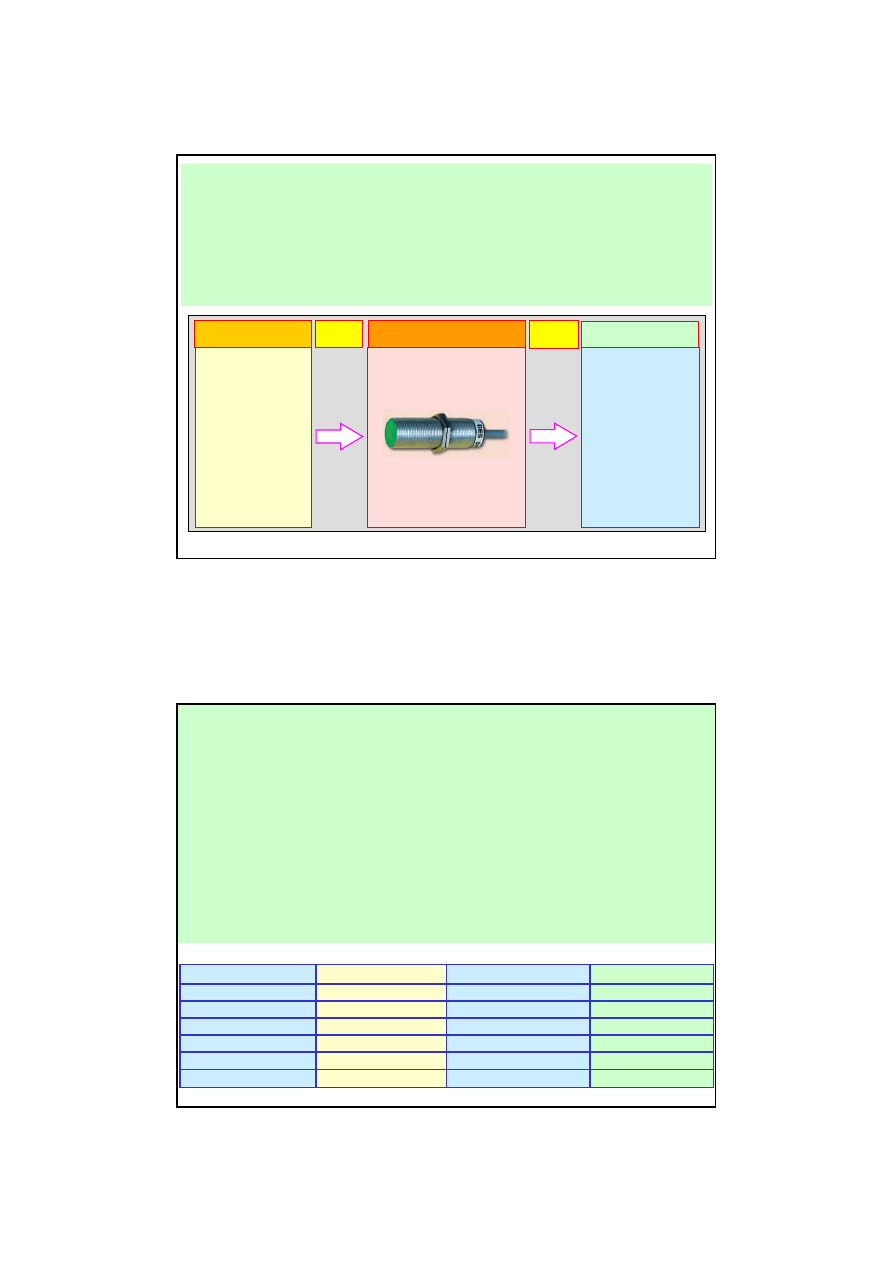
Czujniki (sensory)
Czujnik
(sensor)
Wielko
ść
mierzona
Sygnał
wielko
ś
ci
mierzonej
Przykłady:
Temperatura
Termoelement
Napi
ę
cie
Temperatura
Pt100
Oporno
ść
Ci
ś
nienie
Czujnik ci
ś
nienia
Pojemno
ść
Siła
Czujnik piezoelektryczny
Ładunek
Pr
ę
dko
ść
obrotowa
Pr
ą
dnica tachometryczna
Napi
ę
cie, cz
ę
stotliwo
ść
Jasno
ść
Fotodioda
Pr
ą
d
15
Znaczenie sensorów (czujników)
Stosowane w systemach automatyzacji urz
ą
dzenia do sterowania (regulacji) procesów takie jak
np. sterowniki (regulatory) mog
ą
spełnia
ć
swoje zadania tylko wtedy, gdy otrzymaj
ą
wymagane
dane (informacje) o stanie zespołów roboczych maszyny, urz
ą
dzenia lub procesu, takie jak np.
temperatura, poło
ż
enie, pr
ę
dko
ść
obrotowa.
Te Informacje (sygnały) wyst
ę
puj
ą
najcz
ęś
ciej jako wielko
ś
ci nie elektryczne, lecz np. jako droga,
k
ą
t, ci
ś
nienie, czy poziom cieczy, a wi
ę
c wielko
ś
ci fizyczne. Dlatego te
ż
, aby mogły by
ć
wykorzystane w sterowaniu, musz
ą
by
ć
one przetworzone na sygnały elektryczne. Do tego celu
słu
żą
sensory (czujniki). Sensory mierz
ą
nieelektryczne wielko
ś
ci fizyczne i przetwarzaj
ą
je na
sygnały elektryczne, np. napi
ę
cie.
Fizyczne wielko
ś
ci
mierzone
Przejmo-
wanie
Przetwarzanie
Długo
ść
, odległo
ść
Odkształcenie
Czas
Masa
Temperatura
Nat
ęż
enie
ś
wiatła
Pr
ę
dko
ść
liniowa
Pr
ę
dko
ść
k
ą
towa
Moment
Ci
ś
nienie
Grubo
ść
warstwy
Zdawanie
Wielko
ś
ci elektryczne
Napi
ę
cie
Energia
Oporno
ść
Pojemno
ść
Nat
ęż
enie pola
elektrycznego
Sensory dla systemów mechatronicznych
Sensory i zwi
ą
zane z nimi układy pomiarowe dostarczaj
ą
systemom mechatronicznym wa
ż
nych, mierzalnych
bezpo
ś
rednio informacji o procesie. Dlatego te
ż
s
ą
one istotnymi członami ł
ą
cz
ą
cymi pomi
ę
dzy procesem
a cz
ęś
ci
ą
przetwarzaj
ą
c
ą
informacje, tzn. urz
ą
dzeniem mikroelektronicznym. Szczególnie interesuj
ą
ce s
ą
tego
rodzaju sensory, które zbieraj
ą
np. wielko
ś
ci mechaniczne lub termiczne i tworz
ą
elektryczne sygnały mierzone.
Dlatego te
ż
z szerokiej dziedziny techniki pomiarowej zostanie dokonany tylko krótki przegl
ą
d istotnych dla
systemów mechatronicznych własno
ś
ci, rodzaju sygnałów i zasad działania sensorów.
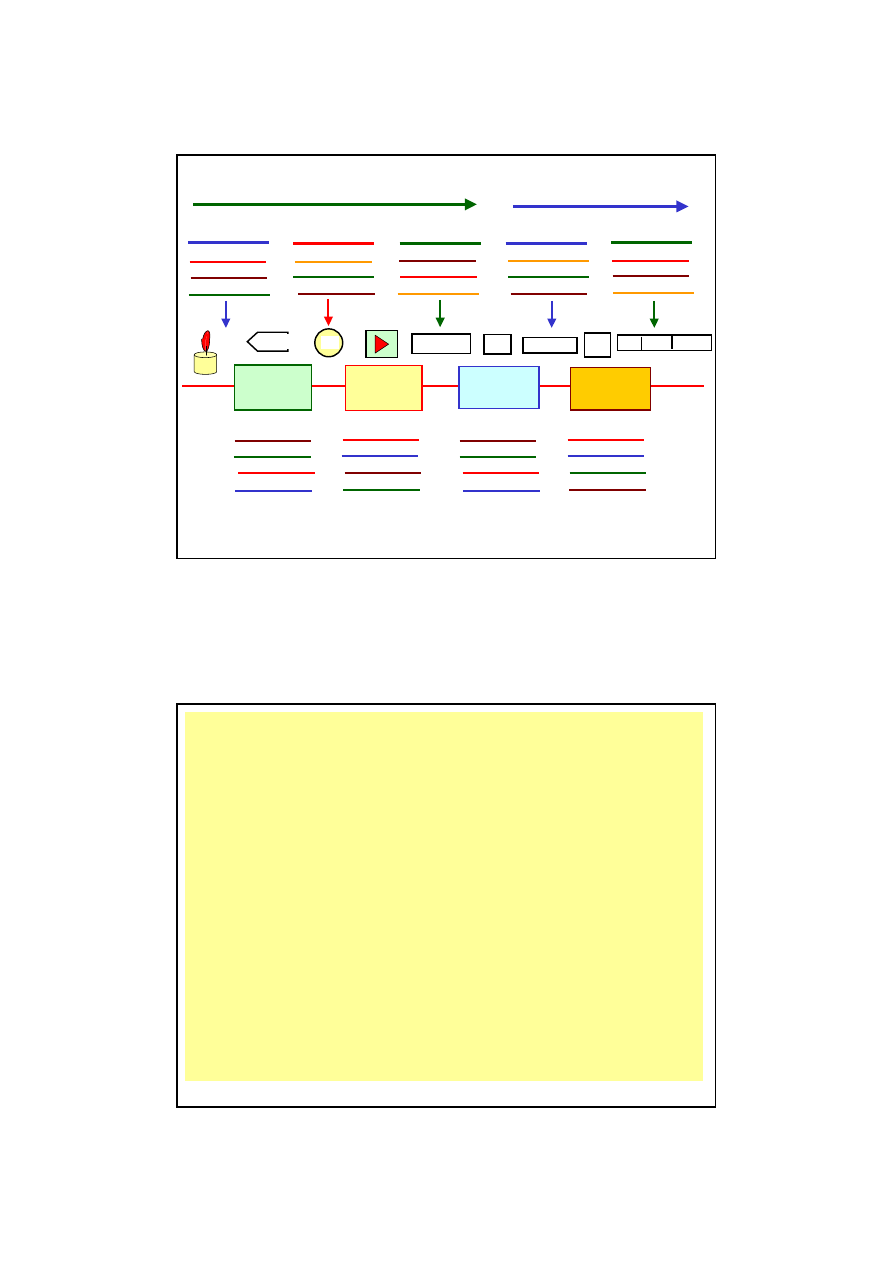
Postacie sygnałów i interfejsy
Dostarczany przez sensor rodzaj sygnału zale
ż
y po pierwsze od zasady działania czujnika, a po drugie od dalszej
transmisji i przetwarzania sygnału. Rozró
ż
nia si
ę
nast
ę
puj
ą
ce postacie sygnałów:
• analogowe amplitudowe sygnały mierzone,
• analogowe cz
ę
stotliwo
ś
ciowe sygnały mierzone,
• cyfrowe sygnały mierzone.
W analogowych amplitudowych sygnałach amplituda jest proporcjonalna do wielko
ś
ci mierzonej, natomiast
w analogowych cz
ę
stotliwo
ś
ciowych sygnałach cz
ę
stotliwo
ść
jest proporcjonalna do wielko
ś
ci mierzonej,
a w sygnałach cyfrowych wielko
ść
mierzona jest kodowana w postaci sygnałów binarnych szeregowych lub
równoległych.
Własno
ś
ci ró
ż
nych postaci sygnałów dla pomiaru wielko
ś
ci
proste, z mikrokomputerem
ograniczone
bardzo ograniczone
Operacje obliczeniowe
proste
proste (licznik impulsów)
przetwor. analog.-cyfrowy
Dopasowanie do komputera
prosta (optoizolator)
prosta (przy transmisji)
du
ż
e nakłady
Separacja galwaniczna
mała
mała
ś
rednia/ du
ż
a
Wra
ż
liwo
ść
na zakłócenia
ogranicz. przez próbkow.
ograniczony przez przetwarz.
bardzo szybki
Przebieg dynamiczny
ogranicz. długo
ś
ci
ą
słowa
du
ż
a
du
ż
a
Dokładno
ść
statyczna
Cyfrowy
Analogowy-cz
ę
stotliwo
ś
ciowy
Analogowy - amplitudowy
16
Sensory (czujniki) – budowa, działanie, przykład
Sensory (czujniki) przetwarzaj
ą
mierzone wielko
ś
ci fizyczne lub chemiczne w sygnały elektryczne.
Sygnał w tym sensie jest zale
ż
n
ą
od czasu fizyczn
ą
lub chemiczn
ą
wielko
ś
ci
ą
stanu (np. ci
ś
nienie,
temperatura, siła, itp.) jako no
ś
nik informacji.
Funk
cjonalnie
sensor składa si
ę
z:
• elementu czujnikowego, który zamienia wielko
ść
mierzon
ą
na sygnał elektryczny oraz
• układu przetwarzania sygnału, który dostarcza znormalizowanego sygnału wyj
ś
ciowego.
Układom elektronicznym do przetwarzania sygnałów stawia si
ę
wysokie wymagania. Realizuj
ą
one zwykle
nast
ę
puj
ą
ce funkcje: wzmacnianie, linearyzacja, kompensacja temperatury, powi
ą
zanie sygnałów oraz
przetwarzanie sygnału na posta
ć
analogow
ą
lub cyfrow
ą
.
Element
czujnikowy
Przetwornik
Sygnał
pomiarowy
Wielko
ść
mierzona
Sygnał
elektryczny
Znormalizowany
sygnał wyj
ś
ciowy
Sensor elementarny
Przetwarzanie sygnału
Membrana
Przetwornik
piezo-
elektryczny
Wzmacnianie
Kompensacja
Linearyzacja
Funkcje
samotestowania
Korekcje
Interfejs
Ci
ś
nienie
Odkształcenie
membrany
Sygnał
elektryczny
Znormalizowany
sygnał wyj
ś
ciowy
Czujnik ci
ś
nienia - przykład
Sensor elementarny
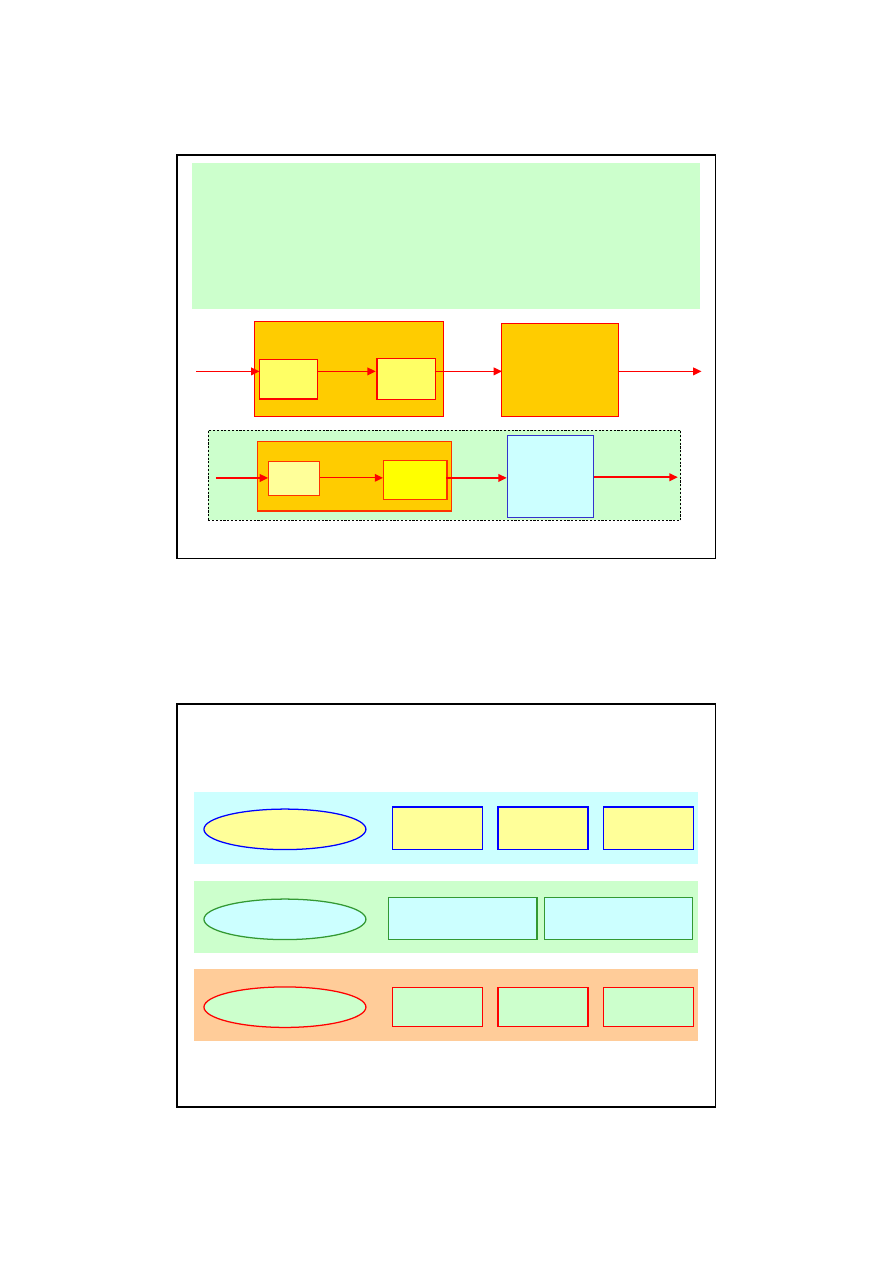
Podział sensorów ze wzgl
ę
du na sygnały i informacje
Sygnał
analogowy
Sygnał
binarny
Sygnał
cyfrowy
Rodzaj sygnału
Sensor z interfejsem
sieciowym
Mo
ż
liwo
ś
ci systemu
Sensor
elementarny
Sensor
zintegrowany
Sensor
inteligentny
Funkcjonalno
ść
Sensor bez interfejsu
sieciowego
Kryterium
Kryterium
Własno
ś
ci
Własno
ś
ci
17
Rodzaje sensorów (czujników)
Ze wzgl
ę
du na du
żą
ró
ż
norodno
ść
sensorów konieczna jest ich klasyfikacja.
W zale
ż
no
ś
ci od stopnia integracji elementu czujnikowego z przetwarzaniem sygnału rozró
ż
nia si
ę
:
sensory elementarne (proste),
sensory zintegrowane,
sensory zaawansowane (inteligentne).
Elektryczna
wielko
ść
wyj
ś
ciowy
Sensor
elementarny
Element
czujnikowy
Przygotowanie
sygnału
(np. wzmacnianie,
filtracja, przetwarzanie
analogowo-cyfrowe)
Jednostka
przetwarzaj
ą
ca
(np. mikroprocesor)
Sygnał
wej
ś
ciowy
Wielko
ść
elektryczna
Sygnał
elektryczny
Przetwor-
nik
Ogólna budowa sensora
Sensor zintegrowany
Sensor zintegrowany
Element czujnikowy
Przygotowanie sygnału
Jednostka
przetwarzaj
ą
ca
Sygnał
elektryczny
Elektryczna
wielko
ść
wyj
ś
ciowa
Sygnał
wej
ś
ciowy
Element czujnikowy
z przetwornikiem
Sensor zintegrowany
Sensor zintegrowany
Przygotowanie sygnału
Sygnał
wej
ś
ciowy
Elektryczna
wielko
ść
wyj
ś
ciowa
Element czujnikowy
Element czujnikowy
z przetwornikiem
Sensor zaawansowany (inteligentny)
Sensor zaawansowany (inteligentny)
Jednostka przetwarzaj
ą
ca
Przygotowanie sygnału
Stopnie rozwoju sensorów
Sensor elementarny
Sensor zintegrowany
Sensor inteligentny
Zbieranie
sygnału
Przetwarzanie
sygnału
Ocena
sygnału
Przetworzenie
wielko
ś
ci fizycznych
w elektryczne
Kondycjonowanie
Linearyzacja
Filtrowanie
Diagnostyka bł
ę
dów,
Nadzorowanie max, min,
Przeliczanie,
Przył
ą
czenie magistrali
18
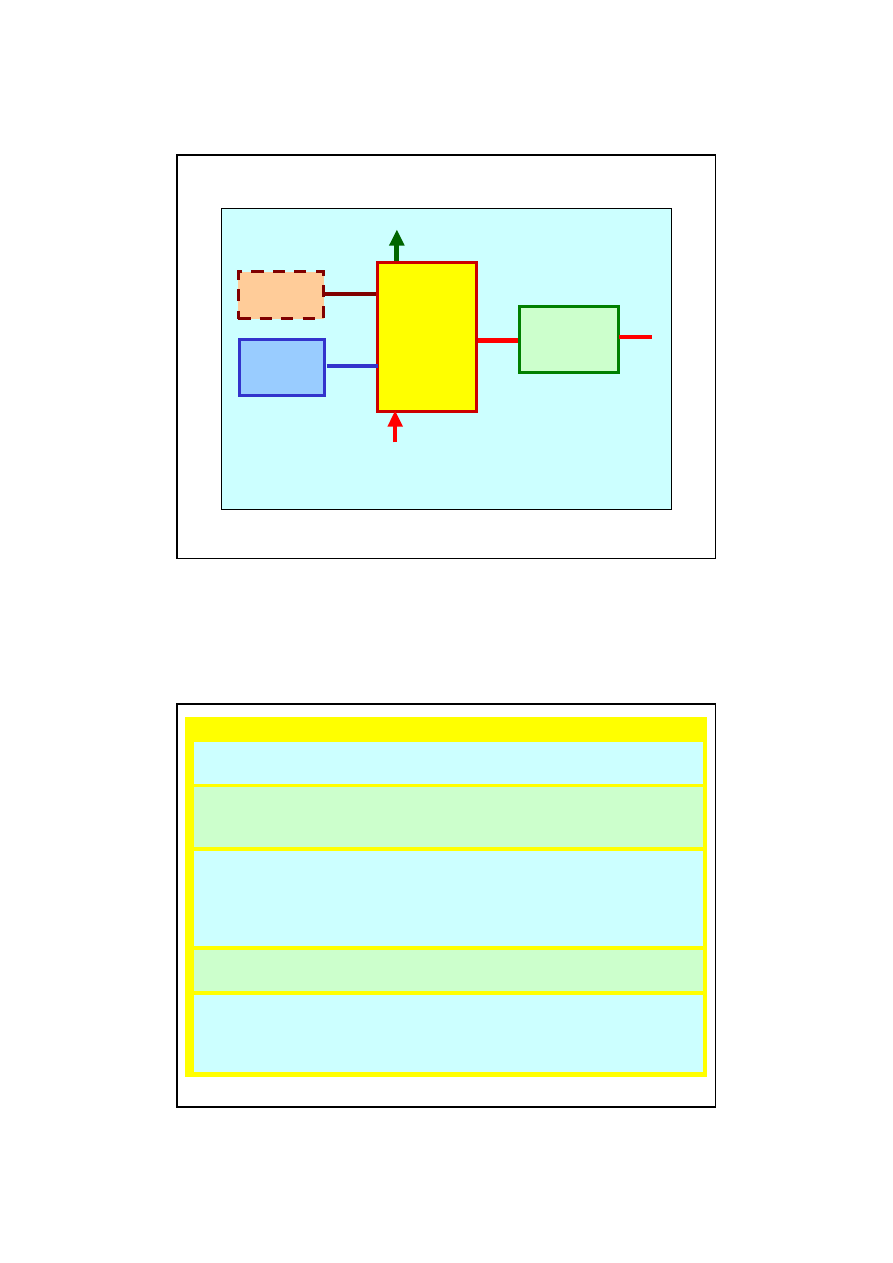
Budowa czujnika inteligentnego (zaawansowanego)
EPROM
Element
czujnikowy
Przetwornik
analogowo-
cyfrowy
(A/C)
Mikrokom-
puter
Interfejs
sieciowy
Wyj
ś
cie
analogowe
Zasilanie
Przetwarzanie
Przetwarzanie
wielko
ś
ci
wielko
ś
ci
mierzonej
mierzonej
Zbieranie
Zbieranie
wielko
ś
ci
wielko
ś
ci
mierzonej
mierzonej
Poł
ą
czenie
Poł
ą
czenie
systemowe
systemowe
Przebieg sygnału w sensorze charakteryzuj
ą
nast
ę
puj
ą
ce etapy:
Przebieg sygnału w sensorze charakteryzuj
ą
nast
ę
puj
ą
ce etapy:
1. Przekształcanie sygnału mierzonej wielko
ś
ci fizycznej w jedn
ą
z wielko
ś
ci po
ś
rednich (np. siły na odkształcenie).
2. Przetworzenie mechaniczno-elektryczne na sygnał elektryczny za
pomoc
ą
elementu przetwornikowego, przy wykorzystaniu ró
ż
nych
zjawisk fizycznych (opór elektryczny, indukcyjno
ść
, piezoelektryczno
ść
).
3. Przetworzenie elektrycznego sygnału za pomoc
ą
układu
elektronicznego w celu: wzmocnienia sygnału, kompensacji waha
ń
punktu zerowego (dryft zera), odfiltrowania sygnałów zakłócaj
ą
cych,
linearyzacji sygnału pomiarowego, dopasowania zakresu pomiarowego
oraz normowania sygnału wyj
ś
ciowego.
4. Przetworzenie analogowego sygnału pomiarowego na posta
ć
cyfrow
ą
za pomoc
ą
przetwornika analogowo-cyfrowego.
5. Zintegrowanie komputera w obudowie inteligentnego sensora pozwala
na dalsz
ą
obróbk
ę
sygnału pomiarowego w celu: nadzorowania danych
pomiarowych, wyzwalania alarmów przy stanach granicznych sygnału,
komunikacji z innymi urz
ą
dzeniami (np. sterownik) itp.
Etapy przetwarzania sygnału w sensorze
19
Ogólne wymagania dotycz
ą
ce sensorów:
Ogólne wymagania dotycz
ą
ce sensorów:
jednoznaczne odwzorowanie wielko
ś
ci wej
ś
ciowej w wielko
ść
wyj
ś
ciow
ą
,
nieczuło
ść
na oddziaływania innych czynników ni
ż
mierzona
wielko
ść
, w tym na zakłócenia elektromagnetyczne,
liniowo
ść
charakterystyki pomiarowej,
normalizacja sygnału wyj
ś
ciowego (sygnały analogowe: 0 ...
+5 V, -5 ... +5 V, -10 ... +10 V oraz p
ę
tla pr
ą
dowa 0 ... 20 mA lub
4 ... 20 mA; sygnały cyfrowe z interfejsami: Centronics, RS232,
RS485; lub systemy sieciowe: Profibus, Interbus, CAN, ASI,
Ethernet, ...),
łatwe zasilanie pr
ą
dem (np. +5 V, +24 V),
mo
ż
liwo
ść
kontroli sprawno
ś
ci działania (np. dioda
ś
wiec
ą
ca,
zdalne odpytywanie, własne nadzorowanie sensora).
Wymagania stawiane sensorom
Wielko
ś
ci do pomiaru
Wielko
ś
ci do pomiaru
(wej
ś
ciowe):
(wej
ś
ciowe):
Długo
ść
K
ą
t
Pr
ę
dko
ść
Przyspieszenie
Siła
Ci
ś
nienie
Nat
ęż
enie przepływu
Temperatura
Wilgotno
ść
D
ź
wi
ę
k
Promieniowanie
Koncentracja (st
ęż
enie)
Nat
ęż
enie pola magnetycznego
Wielko
ś
ci uzyskiwane
Wielko
ś
ci uzyskiwane
w pomiarach (wyj
ś
ciowe):
w pomiarach (wyj
ś
ciowe):
Pojemno
ść
Indukcyjno
ść
Oporno
ść
elektryczna
Czas
Cz
ę
stotliwo
ść
Pr
ą
d
Napi
ę
cie
Sensory – pomiar sygnałów
20
Zamiana wielko
ś
ci fizycznych na elektryczne
E R Q dt C E dt F U
E U
R U
R U
W
mechaniczne
chemiczne
termiczne
magnetyczne
optyczne
p l v
ω
ωω
ω
pH %
T
B, H
γγγγ
1 2 3
4 5 6
7
8
9
10
11
12
13
14
15
16
Wielko
ś
ci wej
ś
ciowe:
p - ci
ś
nienie
l - droga, odległo
ść
v - pr
ę
dko
ść
liniowa
ω
ωω
ω
- pr
ę
dko
ść
k
ą
towa
(obrotowa)
pH - koncentracja jonów
% - st
ęż
enie,
koncentracja
T - temperatura
B - g
ę
sto
ść
przepływu
H - nat
ęż
enie pola
magnetycznego
γγγγ
- kwant
ś
wiatła
Uzyskiwana wielko
ść
elektryczna:
C – pojemno
ść
E – nat
ęż
enie pola
Q – sprz
ęż
enie
obwodu drgaj
ą
cego
R – oporno
ść
dt – odcinek czasu
U – napi
ę
cie
W – energia
elektryczna
Zjawisko lub równanie
1 – zjawisko
piezoelektryczne
2 – tensometry
3 – oporno
ść
wskutek
pr
ą
dów wirowych
4 – pomiar drogi/ czasu
5 – pomiar pojemno
ś
ci
6 – pomiar nat
ęż
enia
pola Lorenz’a
7 – pomiar drogi/ czasu
8 – pomiar zjawiska
Doppler’a
przetwarzania:
9 – zasada
indukcyjno
ś
ci
10 – zmodyfikowane
równanie Nerntsche’a
11 – równanie
Nerntsche’a
12 – metale
13 – termoelement
14 – zjawisko
magnetostrykcji
15 – zjawisko Hall’a
16 – równowa
ż
no
ść
energii i masy
Klasyfikacja sensorów wg wielko
ś
ci fizycznych
- czujnik bezwładno
ś
ciowy (np.
ż
yroskop, czujnik przyspiesze
ń
)
Kierunek
- detekcja fotoelektryczna, wył
ą
czniki kra
ń
cowe, bariery
ś
wietlne
- odbiorniki mikrofalowe dla nawigacji satelitarnej (GPS)
Poło
ż
enie
- tarcze kodowe
K
ą
t
- rozwi
ą
zania potencjometryczne/ indukcyjne dla sygnałów analogowych
- rozwi
ą
zania przyrostowe/ bezwzgl
ę
dne dla sygnałów cyfrowych
- mechaniczne, indukcyjne lub pojemno
ś
ciowe czujniki zbli
ż
eniowe, sondy optyczne
- pomiary czasu przebiegu sygnału (radar, nawigacja satelitarna)
Długo
ść
/ droga
Sensory do pomiaru wielko
ś
ci geometrycznych
- tensometry, zjawisko piezoelektryczne, zjawisko przyspieszenia na
ż
yroskopie
Przyspieszenie
- pomiar amplitudy za pomoc
ą
mikrofonu, przebiegi cz
ę
stotliwo
ś
ci/ czasu z licznikami
Drgania
- tachometr (zjawisko pr
ą
dów wirowych), optyczne pomiary długo
ś
ci w powi
ą
zaniu z
pomiarem czasu przebiegu sygnału, zjawisko Doppler’a, rurka Pito (gazy)
Pr
ę
dko
ść
(liniowa)
- pr
ą
dnica tachometryczna (pr
ą
dnica pr
ą
du stałego)
Pr
ę
dko
ść
obrotowa
- sondowanie zmiany oddziaływania magnetycznego aktywne (ruchomy magnes) lub bierne
(zmiana pola o wysokiej cz
ę
stotliwo
ś
ci)
Impulsy
Sensory do pomiaru wielko
ś
ci zwi
ą
zanych z ruchem
- pomiar momentu oporu przy stałej pr
ę
dko
ś
ci obrotowej lub pr
ę
dko
ś
ci elementu
mechanicznego w strumieniu cieczy
Lepko
ść
- pływak, pojemno
ś
ciowe, indukcyjne i ultrad
ź
wi
ę
kowe sondy poziomu
Poziom napełnienia
- przepływomierze (Coriolisa, ultrad
ź
wi
ę
kowe), liczniki obj
ę
to
ś
ci, cykliczne wa
ż
enie
Strumie
ń
/ nat
ęż
enie
przepływu
- urz
ą
dzenia wagowe, pomiary wolumetryczne
G
ę
sto
ść
Sensory do pomiaru wielko
ś
ci zwi
ą
zanych z mas
ą
21
- tensometry, rozety tensometryczne
Napr
ęż
enie
- membrany, ugi
ę
cie beleczek
- p. tak
ż
e czujniki do pomiaru siły
Ci
ś
nienie
- pomiar momentu z zastosowaniem tensometrów, wykorzystanie zjawiska
magnetostrykcyjnego, pomiar przesuni
ę
cia fazowego itp.
Moment
obrotowy
- ugi
ę
cia spr
ęż
yste, tensometry, zjawisko piezorezystancyjne (półprzewodniki), zjawisko
piezoelektryczne (kwarc, ceramika piezoelektryczna)
Siła
Sensory do pomiaru wielko
ś
ci zwi
ą
zanych z sił
ą
- detekcja promieniowania w pa
ś
mie podczerwieni (diody na podczerwie
ń
), układy CCD
(Charge couples devices), pirometry
Promieniowanie
- poł
ą
czenie pomiarów nat
ęż
enia przepływu z pomiarem ró
ż
nicy temperatur
Ilo
ść
ciepła
- termoelementy (siła termoelektryczna STE)
- termometr oporowy
- termostat, zabezpieczenia termiczne z efektem bimetalicznym itp.
Temperatura
Sensory do pomiaru wielko
ś
ci zwi
ą
zanych z ciepłem
Klasyfikacja sensorów wg wielko
ś
ci fizycznych c.d.
- wymienione wy
ż
ej sensory w kombinacji ze spektrometrem, zestawami filtrów
Widmo
- ogniwa fotoelektryczne, ogniwa słoneczne, reakcje chemiczne (np. papier fotoczuły),
wzmacniacz
ś
wiatła, CCD, kamery TV
Energia
ś
wietlna
Sensory do pomiaru wielko
ś
ci zwi
ą
zanych z e
ś
wiatłem
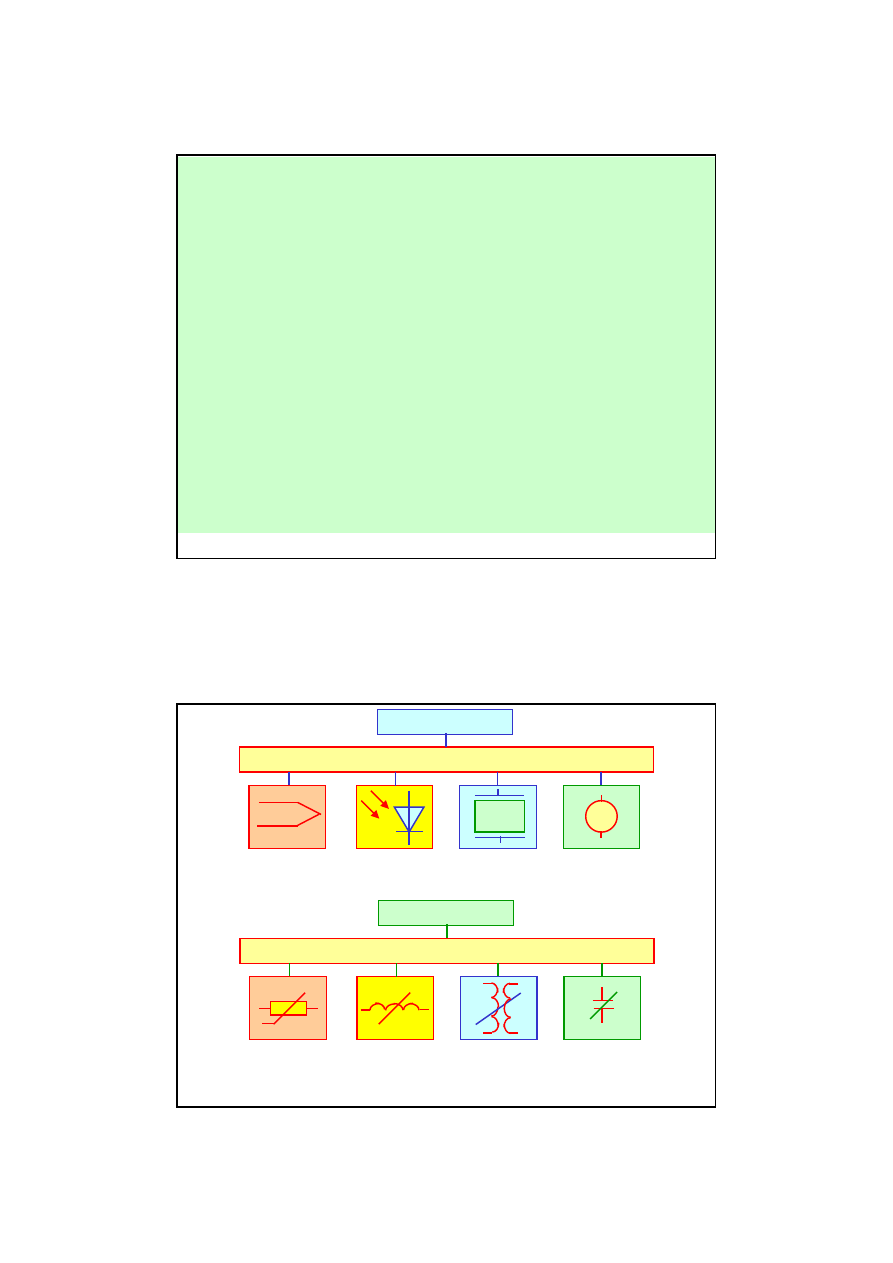
Systematyka sensorów wg technologii
Sensory w
Sensory w
mechatronice
mechatronice
Stykowe
Stykowe
Bezstykowe
Bezstykowe
Siła/ moment
Siła/ moment
• Wieloskładowy sensor
siły/ momentu
• Sensor pomiaru siły
chwytania
• Aktywne chwytaki
monta
ż
owe
• RCC
• IRCC
Dotykowe
Dotykowe
• Wył
ą
cznik
• Pomiar odległo
ś
ci
• Sonda wierszowa
• Sonda macierzowa
• Wył
ą
cznik
powierzchniowy
• Sensor po
ś
lizgu
Wideo
Wideo
-
-
optyczne
optyczne
• Sensor wierszowy
• Przetwarzanie obrazów
(binarne, poziom
szaro
ś
ci)
• Przetwarzanie obrazów
3D (stereo)
• Przetwarzanie obrazów z
aktywnym o
ś
wietleniem
Optyczne
Optyczne
• Bariery
ś
wietlne
• Odbicia
ś
wiatła
• Pomiar odległo
ś
ci
• Skaner 2D
• Skaner 3D
• Sensor przekroju
ś
wietlnego
• Optyczny sensor korelacji
Ultrad
ź
wi
ę
kowe
Ultrad
ź
wi
ę
kowe
• Wył
ą
cznik zbli
ż
eniowy
• Bariery d
ź
wi
ę
kowa
• Pomiar odległo
ś
ci
• Skaner
• Akustyczny sensor
korelacji
Indukcyjne, pojemno
ś
ciowe,
Indukcyjne, pojemno
ś
ciowe,
magnetyczne
magnetyczne
i piezoelektryczne
i piezoelektryczne
• Wył
ą
cznik zbli
ż
eniowy
• Pomiar odległo
ś
ci
• Rozpoznawanie spoiny
• Analiza drga
ń
Pozostałe
Pozostałe
• Mikrofalowe
• Pneumatyczne
• Radioaktywne
• Chemiczne
22
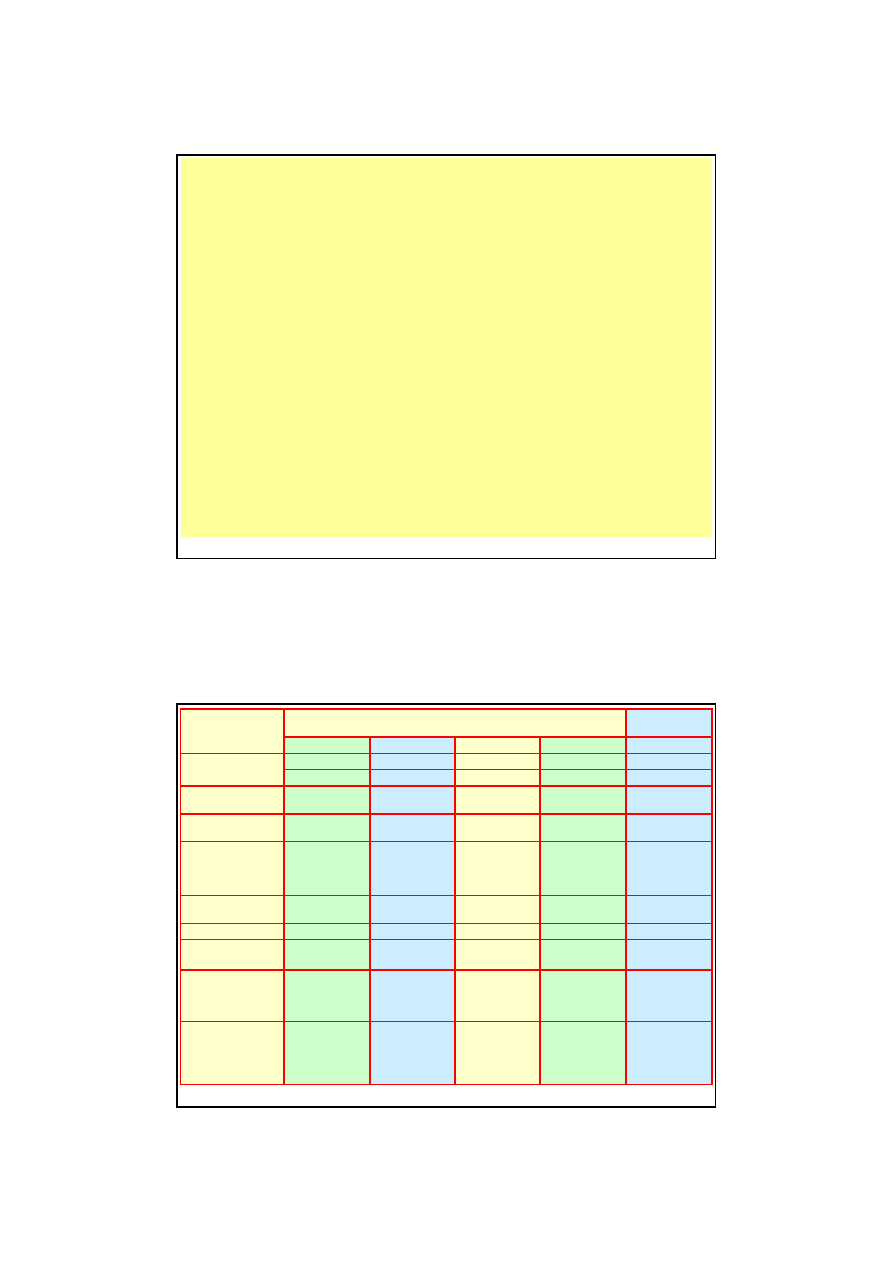
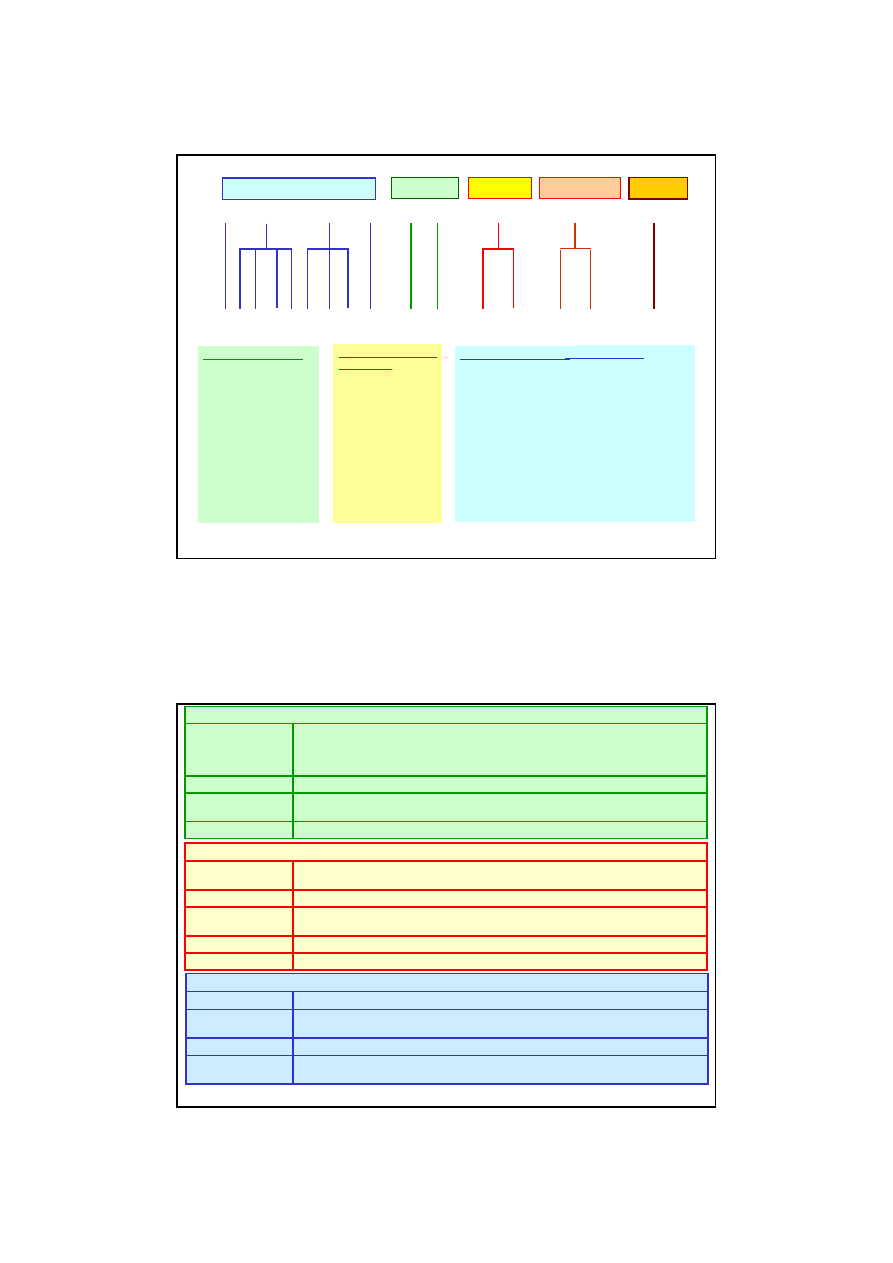
Pomiary sygnałów
Wielko
ś
ci
fizyczne
Sygnał
elektryczny
Sygnał
standardowy
Kod cyfrowy
sygnału
Pakiet
danych
cyfrowo
analogowo
temperatura
0 ... 10 V
protokół Modbus
binarnie
TCP/IP
4 ... 20 mA
napi
ę
cie
siła
cz
ę
stotliwo
ść
sygnału
10 mV/ K
liczba stałoprzec.
protokół Profibus
ASCII
ładunek
pr
ę
dko
ść
obrotowa
TC
mV
4 ... 20 mV
A
/
C
10010010
NIC
Adr. Data Check
Czujnik
podstawowy
Kondycjono-
wanie sygnału
Przetwornik
analogowo-
cyfrowy
Interfejs
magistrali lub
sieciowy
Przykłady:
mechan. wył. kra
ń
c.
filtr
dwójkowy
Bluetooth
sterownik magistrali
przetwornik Flash
wzmacnianie
termoelement
piezokryształ
dopasowanie
przetwornik stopniowy
karta interfejsu
adapter sieci
8-bitowy A/C
ograniczanie
tensometry
Sensory
Sensory mo
ż
na
klasyfikowa
ć
klasyfikowa
ć
wg ró
ż
nych
kryteriów
kryteriów. Takimi kryteriami mog
ą
by
ć
np.:
rodzaj mierzonej wielko
ś
ci,
wykorzystane zjawisko fizyczne,
rodzaj sygnału wyj
ś
ciowego,
zakres pomiarowy,
rozdzielczo
ść
,
wymiary itp.
Sensory mog
ą
pracowa
ć
na zasadzie
stykowej
stykowej lub
bezstykowej
bezstykowej, mog
ą
one by
ć
czynne
czynne
(aktywne) lub
bierne
bierne (pasywne).
W sensorach aktywnych elektryczny sygnał wyj
ś
ciowy powstaje bez dostarczania
dodatkowej energii pomocniczej (zasilania) dzi
ę
ki samemu działaniu wielko
ś
ci
mierzonej. Natomiast sensory bierne wymagaj
ą
dostarczania dodatkowej energii, aby
uzyska
ć
z nich sygnał elektryczny.
Sensory mog
ą
mie
ć
ró
ż
n
ą
odporno
ść
na działanie warunków
ś
rodowiska (mediów,
zakłóce
ń
, itp.).
Aby na podstawie sygnałów wej
ś
ciowych (pokazanych wcze
ś
niej) uzyska
ć
sygnały
wyj
ś
ciowe, stosowane s
ą
ró
ż
ne zjawiska (efekty) fizyczne. Dlatego te
ż
rozró
ż
nia si
ę
sensory: pojemno
ś
ciowe, indukcyjne, rezystancyjne (oporowe), piezoelektryczne,
magnetooporowe, termoelektryczne, piezoelektryczne, ultrad
ź
wi
ę
kowe,
wykorzystuj
ą
ce zjawisko Hall’a itd.
Sensory – pomiar sygnałów
23
Ogólny podział czujników wg zasady działania
Potencjometrycznie - przez przesuwanie suwaka potencjometrycznego zmienia si
ę
oporno
ść
.
W ten sposób mo
ż
na mierzy
ć
np. drog
ę
, przemieszczenie, k
ą
t, lub poziom napełnienia.
Tensometry mierz
ą
na zasadzie zmiany oporno
ś
ci małe odkształcenia (spr
ęż
yste) obci
ąż
onego
elementu. W ten sposób mo
ż
na mierzy
ć
np. sił
ę
, ci
ś
nienie, przyspieszenie i napr
ęż
enia
w materiałach.
Rezystancyjnie - szczególnie materiały półprzewodnikowe zmieniaj
ą
swoj
ą
oporno
ść
w zale
ż
no
ś
ci
od działaj
ą
cych wielko
ś
ci fizycznych. W ten sposób mo
ż
na mierzy
ć
np. temperatur
ę
, pole
magnetyczne i elektryczne, promieniowanie
ś
wietlne i radioaktywne.
Pojemno
ś
ciowo - zmiany odległo
ś
ci płytek (okładzin) kondensatora lub własno
ś
ci dielektryka
powoduj
ą
zmian
ę
pojemno
ś
ci. Na tej zasadzie mo
ż
na mierzy
ć
poło
ż
enie, grubo
ść
warstwy,
ci
ś
nienie lub wilgotno
ść
.
Indukcyjne - indukcyjno
ść
cewki lub sprz
ęż
enia pomi
ę
dzy cewkami mo
ż
na zmienia
ć
przez
przesuwanie rdzenia ferromagnetycznego. Przy szybkich ruchach mo
ż
na wykorzysta
ć
indukowane
napi
ę
cie. W ten sposób mo
ż
na mierzy
ć
np. poło
ż
enie, pr
ę
dko
ść
, drgania lub d
ź
wi
ę
ki.
Efekt piezoelektryczny - okre
ś
lone kryształy przy
ś
ciskaniu lub rozci
ą
ganiu wytwarzaj
ą
na swojej
powierzchni ładunek elektryczny. Na tej zasadzie mo
ż
na mierzy
ć
np. sił
ę
, ci
ś
nienie
i przyspieszenie, przede wszystkim przy szybkich zmianach (dynamicznych) wielko
ś
ci.
Efekt Seebeck’a - w miejscu styku dwóch ró
ż
nych przewodników elektrycznych powstaje napi
ę
cie
(STE) zale
ż
ne od temperatury. To zjawisko jest podstaw
ą
budowy termoelementów i pirometrów.
Zjawisko fotoelektryczne - metale i półprzewodniki reaguj
ą
na padaj
ą
c
ą
na nie wi
ą
zk
ę
ś
wiatła
uwalnianiem elektronów. Na tej zasadzie mierzy si
ę
promieniowanie elektromagnetyczne (
ś
wiatło),
tak
ż
e w zakresie niewidzialnym.
Sensory aktywne (czynne) i pasywne (bierne)
Sensory aktywne
Sensory aktywne
Przetwarzanie energii
G
Efekt
termoelektryczny
Efekt
fotoelektryczny
Efekt
piezoelektryczny
Zasada
elektrodynamiczna
Sensory pasywne
Sensory pasywne
Zmiana własno
ś
ci elektrycznych
Oporno
ść
Indukcyjno
ść
Sprz
ęż
enie
indukcyjne
Pojemno
ść
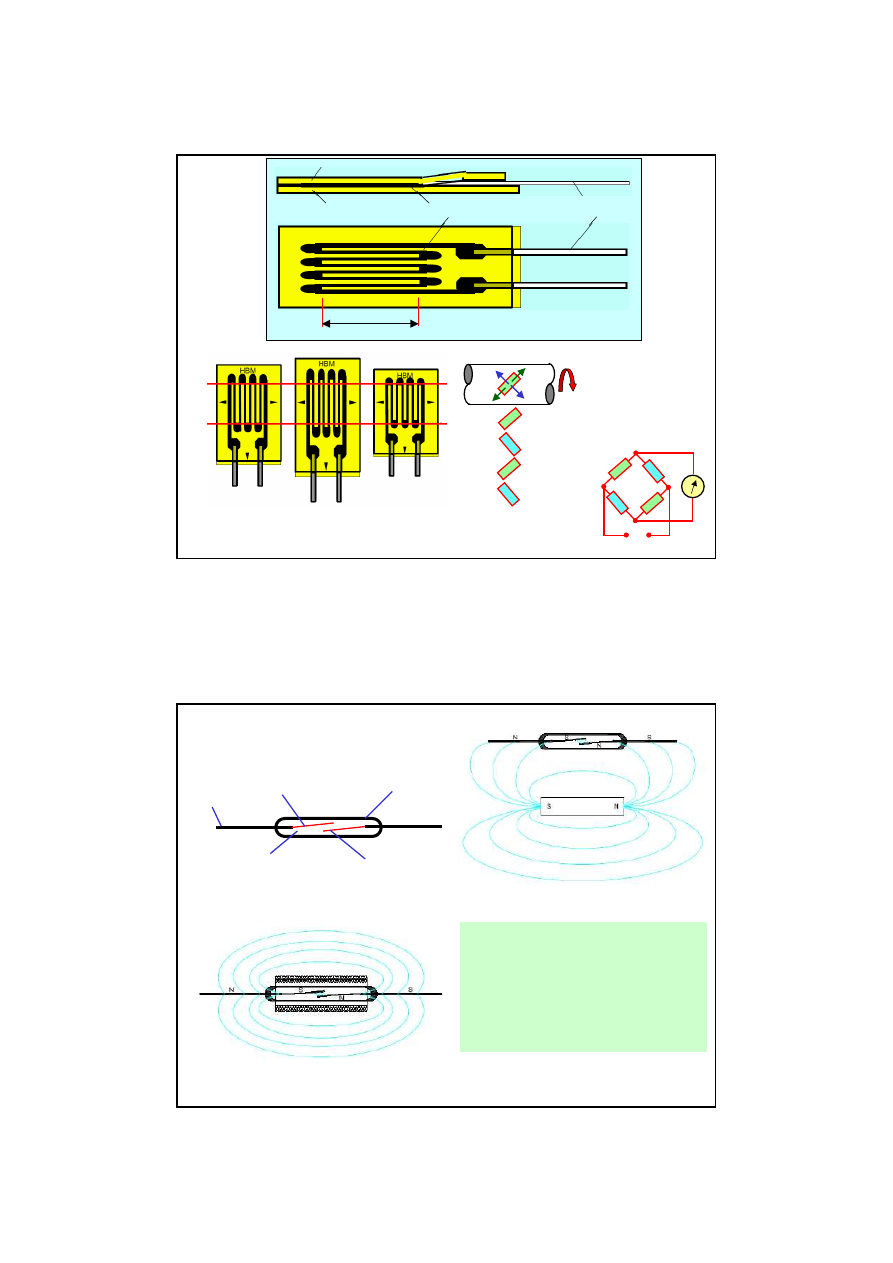
24
Tensometry – czujniki oporowe
Osłona
Obwód pomiarowy
No
ś
nik
Przył
ą
cze
Aktywna
długo
ść
R
R +
∆∆∆∆
R
R -
∆∆∆∆
R
Rozci
ą
ganie
Ś
ciskanie
Budowa tensometru
+
ττττ
+
ττττ
-
ττττ
-
ττττ
(+)
εεεε
+
ττττ
- napr
ęż
enia styczne
(rozci
ą
ganie)
-
ττττ
- napr
ęż
enia styczne
(
ś
ciskanie)
M
M – moment obrotowy
(+)
εεεε
(-)
εεεε
εεεε
- odkształcenie
wzgl
ę
dne
(-)
εεεε
˜
R+
∆∆∆∆
R
R-
∆∆∆∆
R
R+
∆∆∆∆
R
R-
∆∆∆∆
R
Pełny mostek
Kontaktrony
Rurka szklana
Ferromagnetyczna
płytka
Ko
ń
cówka
Wewn
ą
trz gaz
oboj
ę
tny lub pró
ż
nia
Styk przeł
ą
cznika
Budowa kontraktronu
Dane techniczne kontaktronu (przykład):
- moc znamionowa
0 do 50 W
- napi
ę
cie zał
ą
czania (DC)
0 do 500 V
- pr
ą
d zał
ą
czania
0 do 1.5 A
- pr
ą
d stały
0 do 2.5 A
- napi
ę
cie niszcz
ą
ce (DC)
100 do 700 V
Przeł
ą
czanie magnesem
Przeł
ą
czanie cewk
ą
Pr
ą
d stały DC (ang. Direct current)
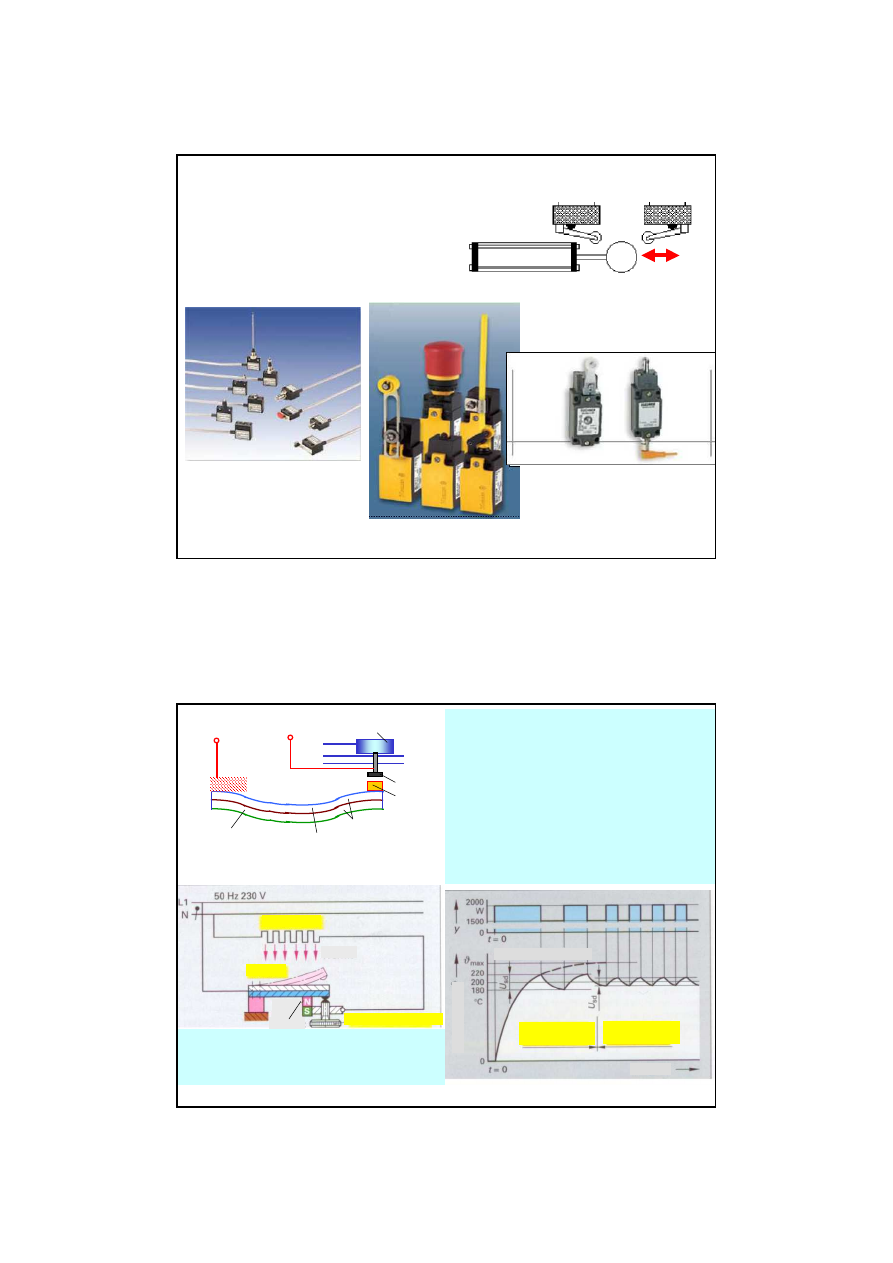
25
Wył
ą
czniki kra
ń
cowe
Zastosowanie
Zastosowanie
Nadzorowanie:
drzwi, okien, klap, obrabiarek
(wykrywanie skrajnych
poło
ż
e
ń
zespołów roboczych)
Termostat bimetaliczny i dwustanowa regulacja temperatury
Nastawianie
temperatury zadanej
Przył
ą
cza
elektryczne
Magnes
Rdze
ń
ż
elazny
Paski bimetalowe
Z materiału o mniejszej
rozszerzalno
ś
ci cieplnej
Z materiału o wi
ę
kszej
rozszerzalno
ś
ci
Termostat bimetaliczny
Binarne sensory (czujniki) temperatury s
ą
cz
ę
sto
budowane jako termostaty bimetaliczne. Przy
nagrzewaniu paska zło
ż
onego z dwóch metali o ró
ż
nej
rozszerzalno
ś
ci cieplnej nast
ę
puje jego wygi
ę
cie i
rozł
ą
czenie styku. Magnes umo
ż
liwia uzyskanie
histerezy – styk otwiera si
ę
przy innej temperaturze ni
ż
zamyka.
Przykład termobimetalu: FeNi36 (inwar) - FeNi20Mn6
Jednostkowe odkształcenie: 28,5 10
-6
K
-1
Dopuszczalne napr
ęż
enie zginania: 200 N/mm
2
Przewodno
ść
cieplna:
13 W/ m K
Jednostkowa oporno
ść
elektryczna: 0,78 10
-6
Ω
m
G
ę
sto
ść
: 8,1 10
3
kg/m3
Zadajnik temperatury
Magnes
Bimetal
Grzałka
Ciepło
Binarne sensory temperatury s
ą
stosowane do regulacji
temperatury w elektrycznych urz
ą
dzeniach grzewczych
(płyty grzejne,
ż
elazka, ogrzewanie mieszka
ń
) oraz
ochrony termicznej np. silników elektrycznych.
Du
ż
a ró
ż
nica
przeł
ą
czania
Mała ró
ż
nica
przeł
ą
czania
T
e
m
p
e
ra
tu
ra
ϑϑϑϑ
Bezwładno
ść
cieplna
Czas t
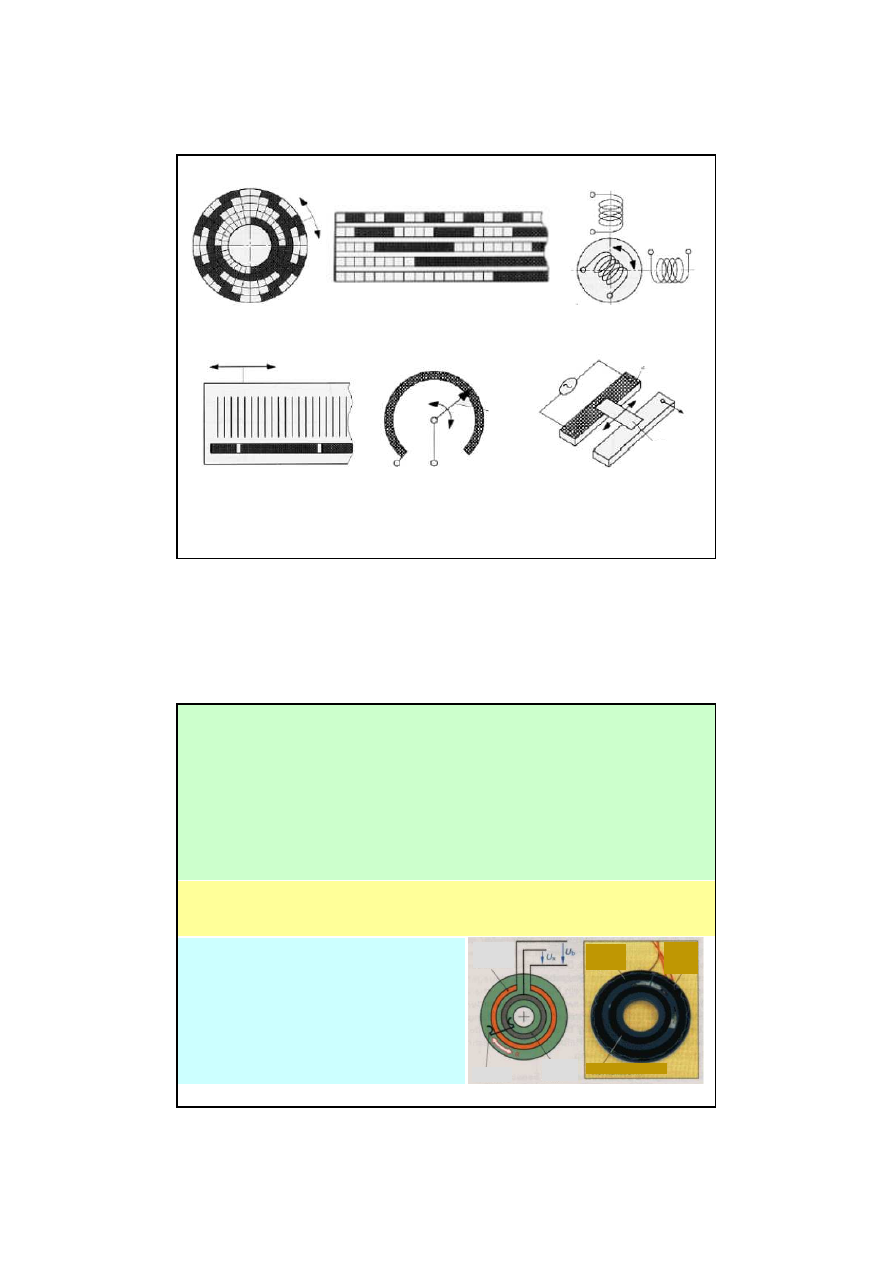
26
Tarcza kodowa
Liniał kreskowy
Resolwer
Potencjometr
Potencjometr liniowy
Suwak
Ś
cie
ż
ka
oporowa
Sonda
pomiarowa
Liniał kodowy
Zasada budowy przetworników pomiaru poło
ż
enia
Przetworniki pomiarowe zamieniaj
ą
elektryczne analogowe amplitudowe sygnały z wyj
ś
cia sensora na
odpowiednie inne sygnały elektryczne. Nale
żą
do nich nie wzmacniaj
ą
ce obwody pomiarowe takie jak np.:
• przetwornik pr
ą
d-napi
ę
cie z opornikiem pomiarowym,
• dzielnik napi
ę
cia, dzielnik pr
ą
du,
• przetwornik oporno
ść
-pr
ą
d,
• układy kompensacyjne do pomiaru napi
ę
cia, pr
ą
du lub oporno
ś
ci (mostki pomiarowe) z dodatkowymi
ź
ródłami
napi
ę
cia (zasilania).
Wzmacniacze pomiarowe słu
żą
do tego,
ż
eby najcz
ęś
ciej słabe energetycznie analogowe sygnały wyj
ś
ciowe
z sensorów zamieni
ć
na sygnały o wy
ż
szej energii, która jest niezb
ę
dna dla dalszych składników obwodu
pomiarowego, takich jak np. układy do transmisji, filtry, urz
ą
dzenia wska
ź
nikowe, lub mocniejszych sygnałów
standardowych (np. 0...10 V, 0...20 mA).
Pomiar drogi
Czujniki rezystancyjne s
ą
oparte na zale
ż
nej od drogi zmianie oporno
ś
ci elektrycznej. S
ą
one wykonywane jako
potencjometry na bazie przewodz
ą
cych pr
ą
d elektryczny tworzyw sztucznych (cz
ęś
ciowo tak
ż
e potencjometry
drutowe) i wł
ą
czane jako dzielniki napi
ę
cia.
Oferowane s
ą
ró
ż
ne rodzaje rozwi
ą
za
ń
liniowych
i obrotowych czujników rezystancyjnych (równie
ż
wieloobrotowych, np. 10 obrotowe). W sensorach liniowych
zakres pomiarowy zawiera si
ę
od kilku mm do ok. 2 m.
Hermetyczna obudowa umo
ż
liwia ich zastosowanie
równie
ż
w surowych warunkach otoczenia. Prowadnice
zapewniaj
ą
konieczny, wolny od działania siły poprzecznej,
ruch suwaka. Rozdzielczo
ść
sensora wykonanego
z przewodz
ą
cego tworzywa jest bardzo du
ż
a (np. 0,01 mm
dla 100 mm odcinka pomiarowego). Dla zapewnienia
dokładno
ś
ci wa
ż
ne jest bardzo dokładne napi
ę
cie zasilania.
Sensory rezystancyjne – pomiar drogi
Ś
cie
ż
ka
oporowa
Suwak
Ś
cie
ż
ka
stykowa
Ś
cie
ż
ka stykowa
Ś
cie
ż
ka
oporowa
Rowki
korek-
cyjne
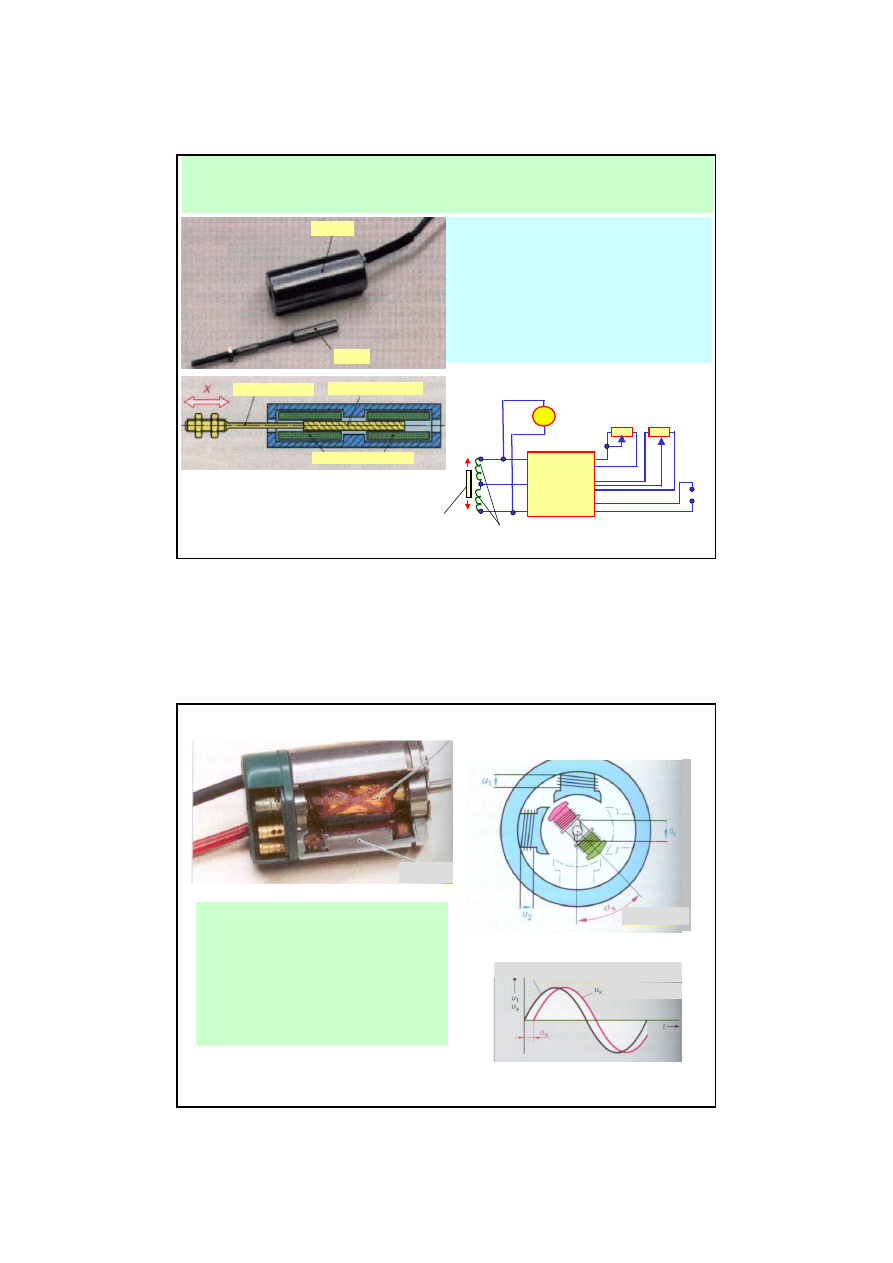
27
Czujniki indukcyjne
Zmiany indukcyjno
ś
ci własnej lub wzajemnej w zale
ż
no
ś
ci od poło
ż
enia dajnika s
ą
wykorzystywane
w sensorach indukcyjnych. W rozwi
ą
zaniach dławikowych czujników indukcyjnych wskutek zmian szczeliny
powietrznej ulega zmianie indukcyjno
ść
dławika. Aby uzyska
ć
zbli
ż
on
ą
do liniowej charakterystyk
ę
stosowane
s
ą
dławiki ró
ż
nicowe w układach mostkowych.
Indukcyjny czujnik drogi
Transformatory ró
ż
nicowe wykorzystuj
ą
zmian
ę
indukcyjno
ś
ci wzajemnej pomi
ę
dzy cewk
ą
pierwotn
ą
i wtórn
ą
wywołan
ą
przesuni
ę
ciem
ż
elaznego rdzenia.
Uzwojenie pierwotne jest zasilane sygnałem
z cz
ę
stotliwo
ś
ci
ą
no
ś
n
ą
, a ró
ż
nica napi
ę
cia
w uzwojeniu wtórnym tworzy sygnał wyj
ś
ciowy zale
ż
ny
od drogi. Czujniki indukcyjne pracuj
ą
ce w sposób
bezstykowy maj
ą
zakres pomiarowy od ułamków mm
do ok.1 m. Ponadto s
ą
stosowane rozwi
ą
zania
czujników do pomiaru poło
ż
enia k
ą
towego (resolwery
indukcyjne).
Cewka
Rdze
ń
Rdze
ń
ferrytowy
Pr
ę
t mosi
ęż
ny
Cewki ró
ż
nicowe
Demodulator
Demodulator
≈≈≈≈
Ruchomy
rdze
ń
Oscylator
Czuło
ść
Punkt
zerowy
U
wy
Cewki
Integracja indukcyjnego czujnika
drogi w układzie pomiarowym
Resolwer – pomiar poło
ż
enia k
ą
towego
Sygnał stojana
Sygnał wirnika
u
1
K
ą
t obrotu
Stojan
Wirnik
Resolwery s
ą
stosowane do dokładnego
pomiaru k
ą
ta obrotu i s
ą
one zbudowane
podobnie do małych elektrycznych silników
synchronicznych. Uzwojenia statora s
ą
zasilane napi
ę
ciem przemiennym u
1
i u
2
.
Podczas obrotu wirnika w jego uzwojeniach
indukowany jest sygnał u
x’
który jest
przesuni
ę
ty w fazie o k
ą
t
α
x
wzgl
ę
dem
sygnału zasilania.
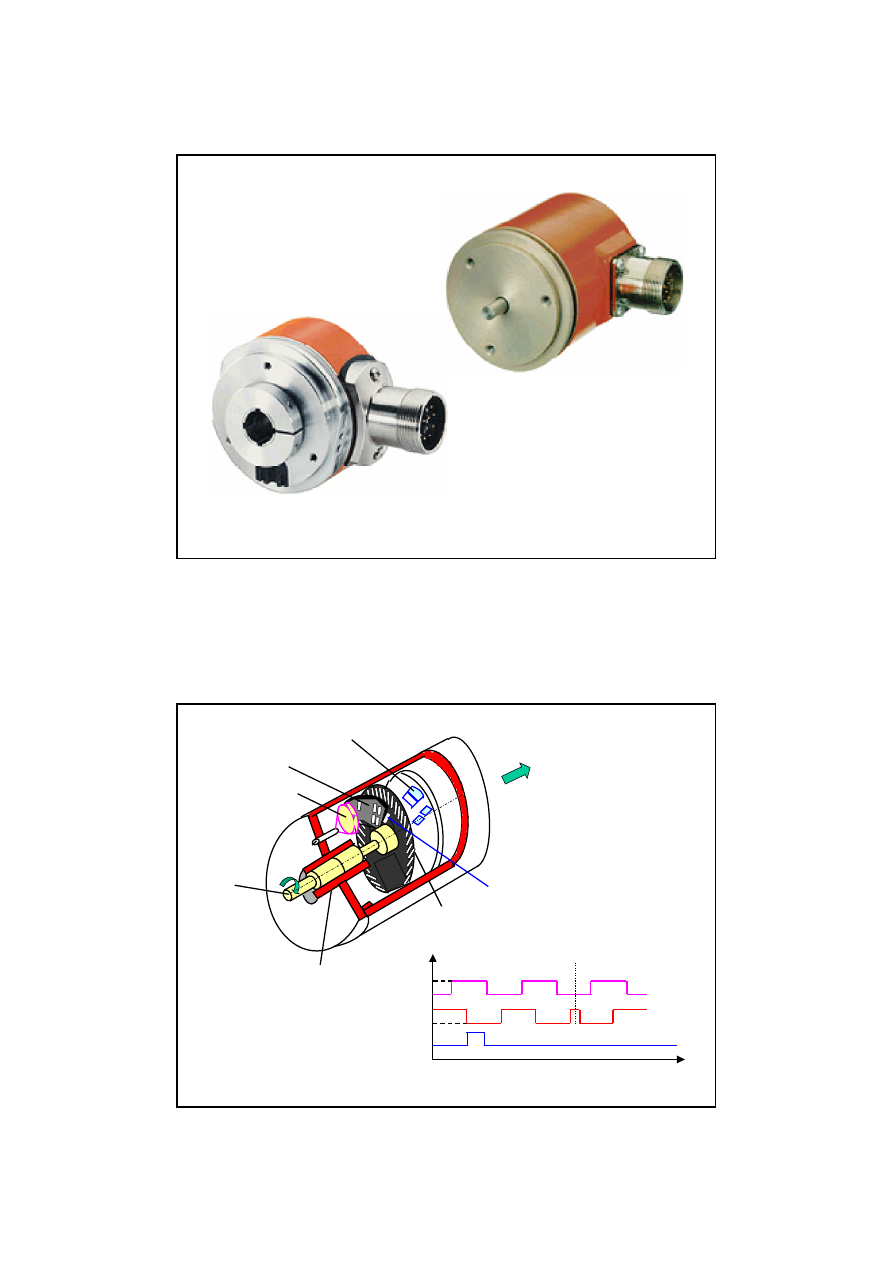
28
Przykłady przetworników obrotowo-impulsowych
(enkoder’ów optycznych)
Budowa i działanie enkodera optycznego
Wałek
Ś
cie
ż
ka/ kanał
t
H
L
H
L
Do tyłu
Do przodu
Zero
Ś
cie
ż
ka A
Ś
cie
ż
ka B
Ło
ż
yska
Fotoelementy
Tarcza kodowa
LED
Znak odniesienia
Siatka formuj
ą
ca
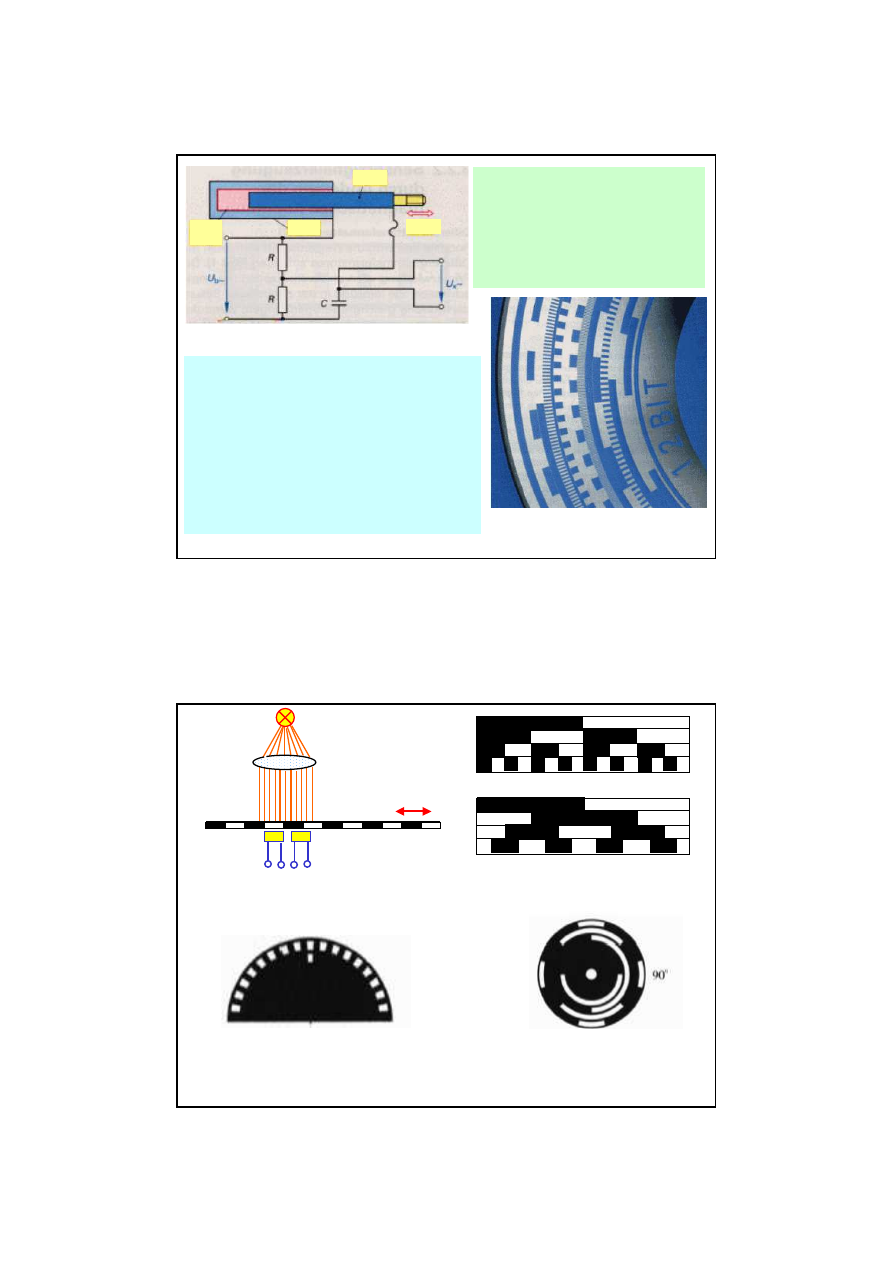
29
Czujniki pojemno
ś
ciowe i kodowane
W czujnikach pojemno
ś
ciowych wskutek zmian
odległo
ś
ci płytek (okładzin), powierzchni płytek
lub dielektryka zmienia si
ę
pojemno
ść
kondensatora. Układ pomiarowy, podobnie jak
w czujnikach indukcyjnych, zwykle składa si
ę
z mostka zasilanego pr
ą
dem przemiennym,
który ze wzgl
ę
du na mał
ą
pojemno
ść
jest
zasilany sygnałem o wysokiej cz
ę
stotliwo
ś
ci
no
ś
nej (0,5 ... 1 MHz).
Pojemno
ś
ciowy czujnik drogi z mostkiem zasilanym pr
ą
dem
przemiennym
Czujniki poło
ż
enia z kodowaniem
W kodowanych metodach pomiaru drogi na liniale kodowym
lub tarczy kodowej s
ą
umieszczone dyskretne informacje
o poło
ż
eniu. Przyporz
ą
dkowanie to jest bezwzgl
ę
dne
(absolutne).
Do kodowania s
ą
cz
ę
sto stosowane kody jednokrokowe (np.
kod Gray’a), które s
ą
najcz
ęś
ciej odczytywane optycznie.
Nakłady zwi
ą
zane z budow
ą
takich czujników s
ą
wzgl
ę
dnie
du
ż
e, poniewa
ż
koniecznych jest n
ś
cie
ż
ek pomiarowych,
aby mo
ć
rozró
ż
ni
ć
2n ró
ż
nych dyskretnych poło
ż
e
ń
.
Praktyczne zastosowanie takie sensory maj
ą
głównie
w technikach wytwarzania, np. obrabiarkach sterowanych
numerycznie.
Tarcza kodowa 12-bitowego sensora do
pomiaru poło
ż
enia k
ą
towego (kod Gray’a)
Izo-
lacja
Metal
Metal
Droga
2
3
2
2
2
1
2
0
g
3
g
2
g
1
g
0
Kod dwójkowy (binarny)
Kod Gray’a
Optyczne metody pomiaru przemieszcze
ń
Liniały kodowe do pomiaru
przemieszcze
ń
liniowych
U
1
U
2
s
Przyrostowy układ pomiaru długo
ś
ci
Tarcza przyrostowego przetwornika
obrotowo-impulsowego
Tarcza kodowa bezwzgl
ę
dnego
przetwornika poło
ż
enia k
ą
towego
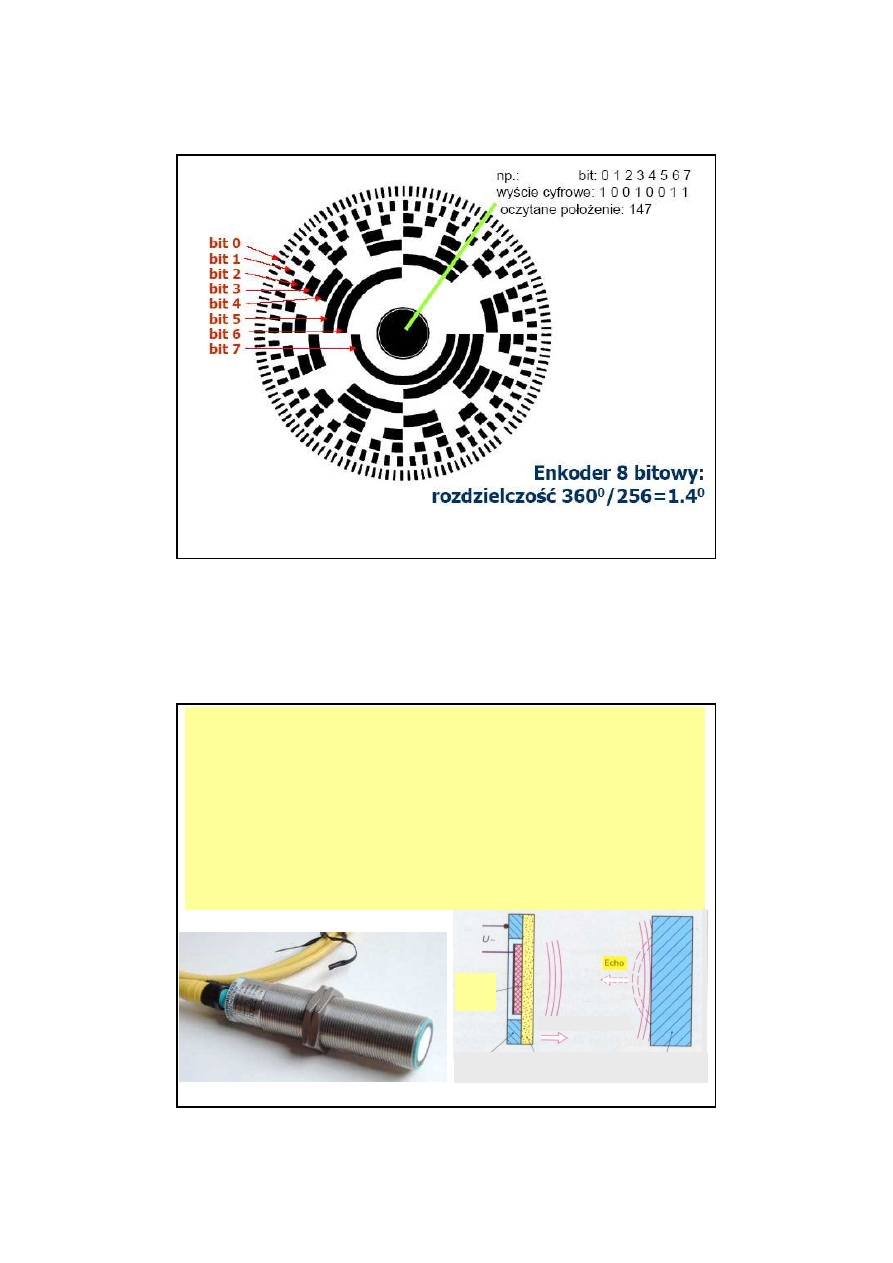
30
Tarcza enkodera absolutnego do pomiaru
poło
ż
enia k
ą
towego
Ultrad
ź
wi
ę
kowy czujnik odległo
ś
ci
Ultrad
ź
wi
ę
kowy czujnik odległo
ś
ci jest cz
ę
sto stosowany np. do pomiaru poziomu paliwa
w baku samochodów. Krótkie impulsy (niesłyszalne) d
ź
wi
ę
kowe (np. f=150 kHz) s
ą
wysyłane,
odbijaj
ą
si
ę
od powierzchni paliwa i s
ą
znowu odbierane przez czujnik. Na podstawie pomiaru
czasu pomi
ę
dzy wysłaniem i odbiorem impulsu (czas przebiegu) jest okre
ś
lana odległo
ść
.
Odbijaj
ą
ca powierzchnia powinna by
ć
mo
ż
liwie gładka. Ciecze nadaj
ą
si
ę
do tego bardzo
dobrze, natomiast materiały sypkie cz
ę
sto nie odbijaj
ą
tak dobrze sygnałów ultrad
ź
wi
ę
kowych
oraz powoduj
ą
ich rozpraszanie w ró
ż
nych kierunkach. Warto
ść
mierzona zale
ż
y od pr
ę
dko
ś
ci
rozchodzenia si
ę
d
ź
wi
ę
ku w medium (np. powietrze, para) pomi
ę
dzy czujnikiem i powierzchni
ą
odbijaj
ą
c
ą
fal
ę
ultrad
ź
wi
ę
kow
ą
i dlatego te
ż
jest ona równie
ż
zale
ż
na np. od temperatury,
ci
ś
nienia i wilgotno
ś
ci.
Ultrad
ź
wi
ę
kowe czujniki drogi s
ą
np. stosowane do automatycznego pomiaru odległo
ś
ci
w aparatach fotograficznych i kamerach (dalmierz) , a tak
ż
e do wspomagania parkowania
w samochodach (sonary).
Pier
ś
cie
ń
aluminiowy
Powierzchnia
odbijaj
ą
ca fale
Przedmiot
Impuls ultrad
ź
wi
ę
k.
Kryształ
piezo-
elektr.
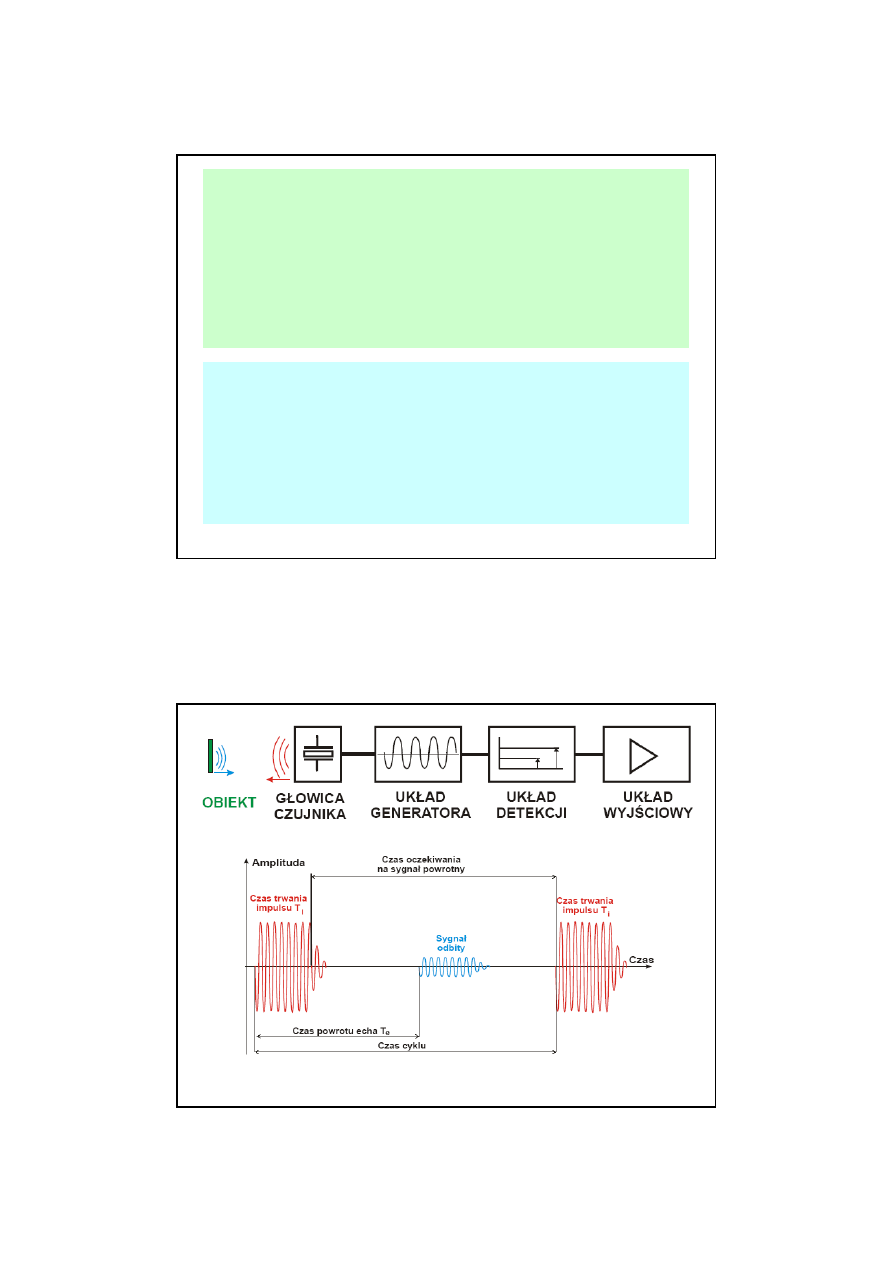
31
Cechy ultrad
ź
wi
ę
kowych czujników odległo
ś
ci
Zalety:
Wykrywaj
ą
wi
ę
cej rodzajów obiektów ni
ż
którykolwiek z pozostałych
trzech (nieomal wszystko)
Du
ż
y zakres odległo
ś
ci – wi
ę
kszy ni
ż
dla czujników indukcyjnych
i pojemno
ś
ciowych, do ok. 10 m
Du
ż
a trwało
ść
, praktycznie niesko
ń
czona liczba cykli pracy
Odporne na trudne warunki
ś
rodowiskowe
Niska cena
Wady:
„Martwa strefa” blisko czujnika – nie mog
ą
wykrywa
ć
bliskich obiektów
Nie mog
ą
wykrywa
ć
małych obiektów
Gładkie powierzchnie musz
ą
by
ć
umieszczone prostopadle do
czujnika, w przeciwnym razie echo nie wróci do niego
Niezbyt du
ż
a dokładno
ść
(0.1÷2% zakresu pomiarowego)
Niezbyt du
ż
a pr
ę
dko
ść
obiektu
Schemat blokowy czujnika ultrad
ź
wi
ę
kowego
Cykl pracy czujnika ultrad
ź
wi
ę
kowego
Czujniki ultrad
ź
wi
ę
kowe
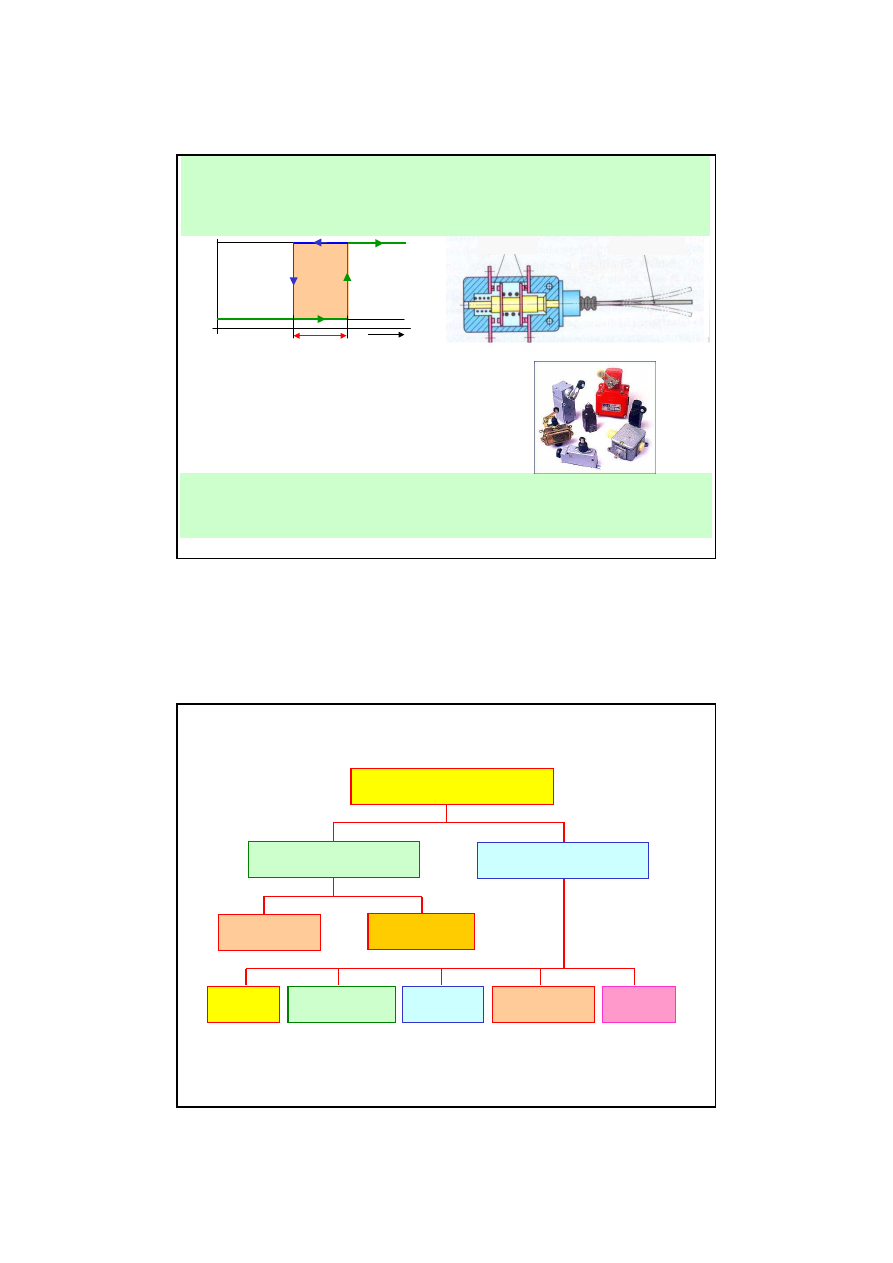
32
Inicjatory - czujniki binarne (dwustanowe)
Wielko
ść
wej
ś
ciowa
S
y
g
n
a
ł
z
c
z
u
jn
ik
a
ZAŁ
WYŁ
1
0
Ró
ż
nica
przeł
ą
czania
Przeł
ą
cznik
Pr
ę
t spr
ęż
ysty
Stykowy czujnik binarny
Bezstykowe czujniki zbli
ż
eniowe (pojemno
ś
ciowe, indukcyjne, optyczne i ultrad
ź
wi
ę
kowe) maj
ą
elektronicznie sterowane wyj
ś
cie sygnału i nie zawieraj
ą
podlegaj
ą
cych zu
ż
yciu ruchomych cz
ęś
ci
mechanicznych. S
ą
one stosowane np. jako wył
ą
czniki kra
ń
cowe w obrabiarkach, a tak
ż
e do
zliczania przedmiotów na ruchomych ta
ś
mach.
Sensory binarne s
ą
czujnikami z dwustanowym wyj
ś
ciem sygnałów (0/1), np. sygnał przeł
ą
czenia
ZAŁ/WYŁ, napi
ę
cie 0 V/ 10 V, pr
ą
d 0 mA/ 20 mA.
Binarne czujniki mog
ą
by
ć
urz
ą
dzeniami elektromechanicznymi stykowymi, albo te
ż
bezstykowymi elektronicznymi czujnikami zbli
ż
eniowymi. Cech
ą
charakterystyczn
ą
czujników
binarnych jest wyst
ę
powanie ró
ż
nicy pomi
ę
dzy zał
ą
czeniem i wył
ą
czeniem (histereza).
Przykłady stykowych
czujników binarnych
(ł
ą
czników drogowych,
wył
ą
czników kra
ń
cowych)
Ogólna klasyfikacja bezstykowych czujników
zbli
ż
eniowych (inicjatorów drogowych)
Bezstykowe czujniki zbli
ż
eniowe
Bezstykowe czujniki zbli
ż
eniowe
Indukcyjne
Indukcyjne
Pojemno
ś
ciowe
Pojemno
ś
ciowe
Pneumatyczne
Pneumatyczne
Optyczne
Optyczne
Ultrad
ź
wi
ę
kowe
Ultrad
ź
wi
ę
kowe
Akustyczne
Akustyczne
Izotopowe
Izotopowe
Z oddziaływaniem na pole
Z oddziaływaniem na pole
Z transmisj
ą
energii
Z transmisj
ą
energii
33
–
Odbicia styków,
niedopuszczalny w
przemy
ś
le
ś
rodków
spo
ż
ywczych i
chemicznym, zu
ż
ycie
Niska cena, odporny, mały,
nie jest podatny na
oddziaływanie obcych pół,
nie wymaga zasilania w
energi
ę
Zał
ą
cza przez r
ę
czne
uruchomienie lub
układ d
ź
wigniowy
Mechaniczny
–
Zagro
ż
enie zu
ż
yciem
spr
ęż
yn styków, ochrona
przed impulsami
pr
ą
dowymi przez człony
RC
Odpowiedni dla surowych
warunków otoczenia,
wysoka
ż
ywotno
ść
,
odpowiedni do
zastosowania w obwodach z
wysok
ą
cz
ę
stotliwo
ś
ci
ą
Trwały magnes
pobudza przez dwa
styki spr
ęż
yste
kra
ń
cowy wył
ą
cznik
zbli
ż
eniowy (styk
reed)
Magnetyczny
60 mm ÷ 6 m
Powolny, nie mo
ż
na go
stosowa
ć
przy
nadci
ś
nieniu i
podci
ś
nieniu jak równie
ż
w
obszarach zagro
ż
onych
wybuchem
Nieczuły na kurz,
zabrudzenie i
ś
wiatło,
rozpoznawanie
najmniejszych obiektów
przy du
ż
ej odległo
ś
ci
Ocenia czas
przebiegu odbitego
impulsu
ultrad
ź
wi
ę
kowego i
okre
ś
la odległo
ść
do
obiektu
Ultrad
ź
wi
ę
kowy
ok. 2 m
Wra
ż
liwy na zabrudzenie i
oddziaływanie obcych
ź
ródeł
ś
wiatła, konieczne
zasilanie w energi
ę
Działa na wszystkie
materiały, du
ż
e odległo
ś
ci
Zał
ą
cza, gdy obiekt
powoduje odbicie
strumienia
ś
wiatła
podczerwonego
Fotoelektryczny
20mm ÷ 40 mm
Małe odległo
ś
ci od
obiektu, wi
ę
ksze gabaryty
ni
ż
porównywalne sensory
indukcyjne
Wysoki stopie
ń
ochrony
(IP67), działa na wszystkie
materiały; nieczuły na
zabrudzenia
Zał
ą
cza, gdy obiekt
powoduje zakłócenie
pola elektrycznego
sensora
Pojemno
ś
ciowy
1 mm ÷ 150 mm
Tylko obiekty z metalu lub
grafitu, nie jest
odpowiedni w przypadku
zwi
ę
kszonego spływu
wiórów metalowych
Wysoki stopie
ń
ochrony
(IP67), bardzo wysoka
dokładno
ść
punktu
zał
ą
czania
Zał
ą
cza, gdy obiekt
powoduje zakłócenie
pola magnetycznego
sensora
Indukcyjny
Odległo
ść
detekcji
Wady
Zalety
Zasada działania
Typ sensora
Zestawienie cech charakterystycznych inicjatorów drogowych
Przykłady sensorów - inicjatory
Czujniki przeł
ą
czaj
ą
ce (binarne) zwane tak
ż
e inicjatorami maj
ą
na wyj
ś
ciu tylko dwa stany
sygnału. Okre
ś
la si
ę
je tak
ż
e jako wył
ą
czniki warto
ś
ci granicznej lub wył
ą
czniki kra
ń
cowe. Sygnał
wyj
ś
ciowy przyjmuje najcz
ęś
ciej dwa poziomy (0V / 5V). Dla wyj
ść
typu PNP wzgl. NPN jako
przeł
ą
cznik jest do dyspozycji tranzystor, dzi
ę
ki czemu mo
ż
na uzyskiwa
ć
równie
ż
inne warto
ś
ci
napi
ęć
lub wi
ę
ksze warto
ś
ci pr
ą
du wskutek zewn
ę
trznego zasilania.
Mechaniczny wył
ą
cznik kra
ń
cowy otwiera i zamyka mechaniczny styk wskutek zewn
ę
trznego
działania (siły).
Kontaktron składa si
ę
z dwóch cienkich pasków metalowych (styków), które s
ą
umieszczone w
rurce szklanej. Wskutek oddziaływania pola magnetycznego styki te przemieszczaj
ą
si
ę
i stykaj
ą
.
Wył
ą
cznik bimetaliczny składa si
ę
z dwóch na stałe poł
ą
czonych pasków metalowych o ró
ż
nych
współczynnikach rozszerzalno
ś
ci cieplnej. Paski te zakrzywiaj
ą
si
ę
przy zmianach temperatury
powoduj
ą
c otwieranie lub zamykanie styku elektrycznego.
Bariera (kurtyna)
ś
wietlna zmienia stan swojego sygnału wyj
ś
ciowego wskutek przerwania lub
odsłoni
ę
cia wi
ą
zki
ś
wiatła.
Pojemno
ś
ciowy czujnik zbli
ż
eniowy reaguje na zmiany pola elektrycznego wskutek dielektryka
lub materiału w obszarze jego działania. Powoduj
ą
one zmiany pojemno
ś
ci kondensatora i tym
samym obwodu drgaj
ą
cego (oscylatora).
Indukcyjny czujnik zbli
ż
eniowy reaguje na zmiany pola magnetycznego wskutek metalu (tak
ż
e
grafitu). Powoduje to zmian
ę
indukcyjno
ś
ci cewki i tym samym rozstrojenie obwodu oscylatora, co
prowadzi do zmiany stanu przerzutnika i sygnału wyj
ś
ciowego.
Ultrad
ź
wi
ę
kowy czujnik zbli
ż
eniowy reaguje na zmiany mocy odbitej fali ultrad
ź
wi
ę
kowej (np.
100 kHz) wskutek obecno
ś
ci ciał stałych lub powierzchni cieczy.
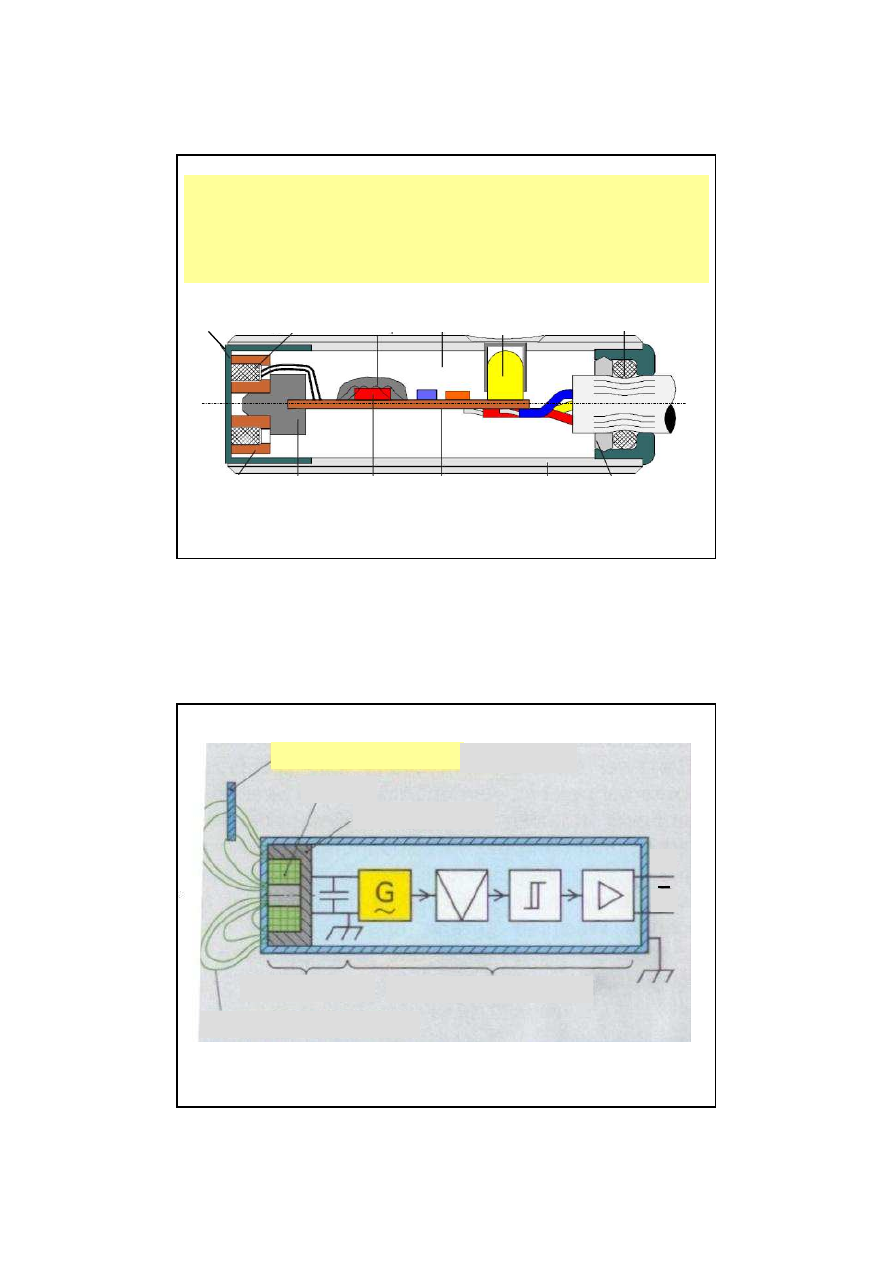
34
Budowa cylindrycznego indukcyjnego czujnika
zbli
ż
eniowego (przekrój wzdłu
ż
ny)
Indukcyjne czujniki zbli
ż
eniowe o budowie cylindrycznej maj
ą
obudow
ę
wykonan
ą
z tworzywa
sztucznego lub ze stali. W przedniej, aktywnej powierzchni czołowej znajduje si
ę
układ cewek
z rdzeniem ferrytowym, które s
ą
osłoni
ę
te tulejk
ą
z tworzywa sztucznego. W
ś
rodku znajduje si
ę
układ elektroniczny umieszczony na płytce lub obwodzie cienkowarstwowym. Dioda
elektroluminescencyjne LED słu
ż
y do wskazywania stanu przeł
ą
czenia czujnika. Obudowa jest
zamkni
ę
ta pokrywk
ą
, w której umieszczony jest kabel przył
ą
czeniowy. Całe wn
ę
trze czujnika jest
zalane mas
ą
z tworzywa sztucznego.
Cewka
Pasta ochronna
Masa
wypełniaj
ą
ca
LED
LED
Pier
ś
cie
ń
uszczelniaj
ą
cy typu „O”
Rdze
ń
ferrytowy
Układ scalony (IC)
Zamocowanie
Wspornik
Obudowa
Zamocowanie
Tulejka z tworzywa
sztucznego
Budowa cylindrycznego indukcyjnego czujnika
zbli
ż
eniowego
Element pobudzaj
ą
cy (metal, grafit)
Rdze
ń
ferrytowy
Cewka
Układ przetwarzaj
ą
cy (IC)
Obwód drgaj
ą
cy
Linie pola magnetycznego
Q
Q
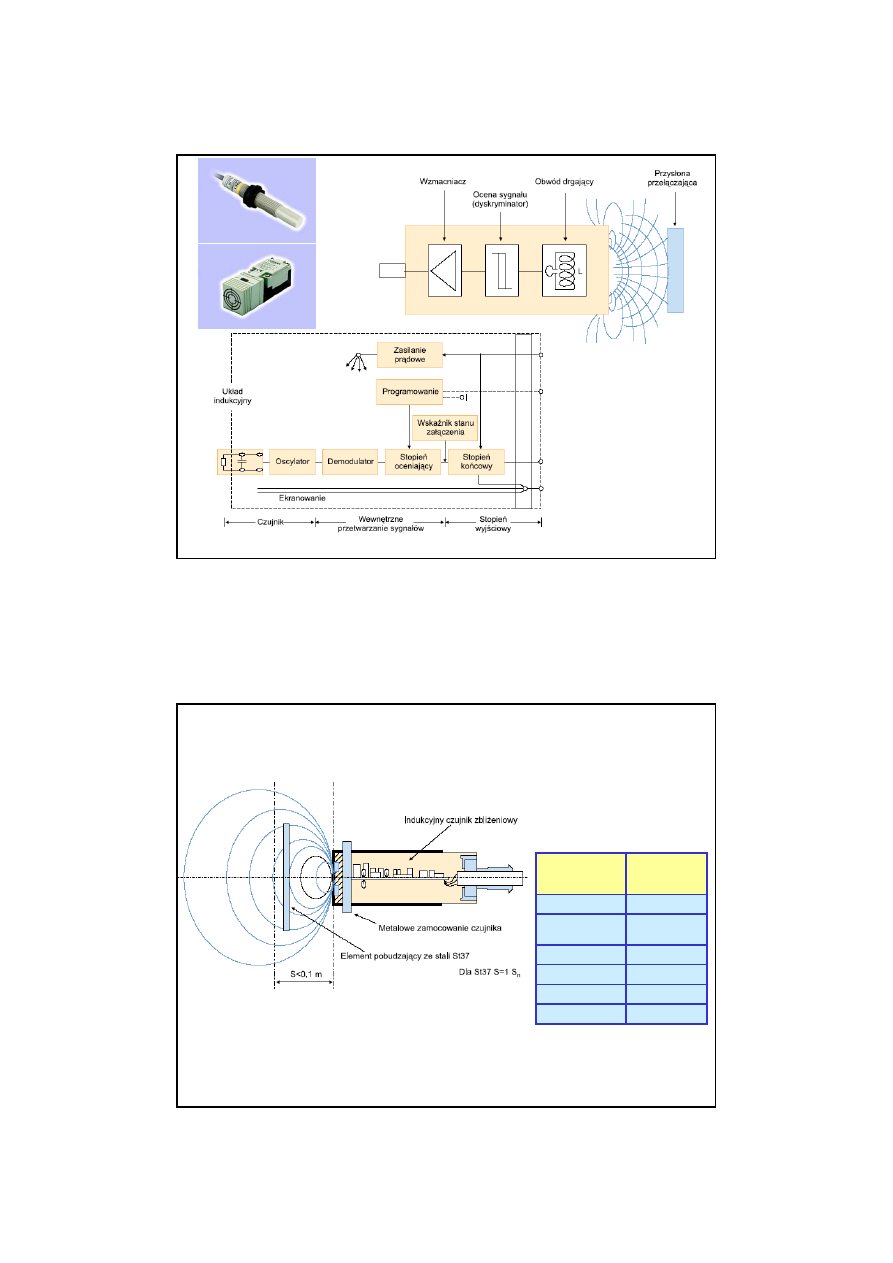
35
Schemat blokowy indukcyjnego czujnika zbli
ż
eniowego
Sprawdzanie działania indukcyjnego czujnika
zbli
ż
eniowego
S – odległo
ść
detekcji,
S
n
– znamionowa odległo
ść
detekcji
S = 0,3÷0,4 S
n
Mied
ź
S = 0,4÷0,5 S
n
Aluminium
S = 0,50 S
n
Mosi
ą
dz
S = 0,85 S
n
Nikiel
S = 0,85 S
n
V2A (stal
nierdzewna)
S = 1,1 S
n
ś
eliwo
Warto
ś
ci
współczynnika
korekcyjnego
Rodzaj materiału
Współczynniki korekcyjne odległo
ś
ci
detekcji dla indukcyjnych czujników
zbli
ż
eniowych dla ró
ż
nych materiałów
elementów pobudzaj
ą
cych
36
Pojemno
ś
ciowe czujniki zbli
ż
eniowe
Ekranowanie
Elektroda czujnika
Element
pobudzaj
ą
cy
Czujniki pojemno
ś
ciowe (np. zbli
ż
eniowe), podobnie jak czujniki indukcyjne, pracuj
ą
w sposób
bezstykowy. Uzupełniaj
ą
one ten obszar zastosowa
ń
, w którym nie mo
ż
na wykorzysta
ć
indukcyjnej zasady działania. Za pomoc
ą
czujników pojemno
ś
ciowych mo
ż
na wykrywa
ć
równie
ż
materiały nie przewodz
ą
ce pr
ą
du elektrycznego. S
ą
oferowane głównie pojemno
ś
ciowe czujniki
zbli
ż
eniowe, ale s
ą
tak
ż
e takie czujniki, które mierz
ą
odległo
ść
i na wyj
ś
ciu dostarczaj
ą
sygnał
analogowy.
Aktywny element czujnika pojemno
ś
ciowego składa si
ę
z kr
ąż
kowej elektrody i kubkowego
ekranowania. Te dwie elektrody tworz
ą
kondensator z podstawow
ą
pojemno
ś
ci
ą
C
P
. Wskutek
zbli
ż
ania elementu pobudzaj
ą
cego do powierzchni czujnika (odległo
ść
S) zmienia si
ę
pojemno
ść
o warto
ść
∆
C
S
. Kondensator jest cz
ęś
ci
ą
składow
ą
obwodu generatora RC (oscylatora). Jego
napi
ę
cie wyj
ś
ciowe jest zale
ż
ne od całkowitej pojemno
ś
ci C = C
P
+
∆
C
S
pomi
ę
dzy elektrod
ą
czujnika i potencjałem ekranu.
W czujniku zbli
ż
eniowym sygnał wyj
ś
ciowy
z generatora jest prostowany, filtrowany i przez
stopie
ń
ko
ń
cowy ze wzmacniaczem
i przerzutnikiem jest wyprowadzany na wyj
ś
cie.
W takich czujnikach wyst
ę
puj
ą
dwa stany
sygnałów: pobudzony i niepobudzony (1 lub 0).
Element
pobudzaj
ą
cy
S
Ekranowanie
Elektroda
˜˜˜
˜˜˜
Filtr
Prostownik
Generator
Wzmacniacz
Czuło
ść
pojemno
ś
ciowego czujnika zbli
ż
eniowego wynika ze zmiany pojemno
ś
ci
∆
C
S
wskutek oddziaływania
elementu pobudzaj
ą
cego, która powoduje przeł
ą
czenie sygnału wyj
ś
ciowego czujnika. Istotny wpływ na
pojemno
ść
, oprócz odległo
ś
ci S i powierzchni elektrod, ma równie
ż
stała dielektryczna
εεεε.
Dlatego te
ż
w zale
ż
no
ś
ci od materiału elementu pobudzaj
ą
cego, przy czym mog
ą
to by
ć
równie
ż
ciecze lub materiały
sypkie, za pomoc
ą
współczynnika redukcyjnego nale
ż
y uwzgl
ę
dni
ć
zmian
ę
warto
ś
ci stałej dielektrycznej,
która ma istotny wpływ na odległo
ść
przeł
ą
czania. Wzorcowym elementem pobudzaj
ą
cym jest uziemiona
płytka o grubo
ś
ci 1mm wykonana ze stali St37, dla której uzyskuje si
ę
znamionow
ą
odległo
ść
przeł
ą
czania S
n
,
a warto
ść
współczynnika korekcyjnego wynosi 0. Oznacza to,
ż
e np. materiały ceramiczne s
ą
przez czujnik
pojemno
ś
ciowy lepiej rozpoznawane ani
ż
eli stalowe.
1 2 5 10
20 50 100 200
Stała dielektryczna e
r
W
s
p
ó
łc
z
y
n
n
ik
r
e
d
u
k
c
y
jn
y
1,0
0,8
0,6
0,4
0,2
0
O
le
j
L
ó
d
P
V
C
C
e
ra
m
ik
a
S
z
k
ło
A
lk
o
h
o
l
W
o
d
a
Aby móc wyrówna
ć
ró
ż
norodne
odległo
ś
ci detekcji za pomoc
ą
współczynnika redukcyjnego dla
ró
ż
nych materiałów, w niektórych
typach czujników pojemno
ś
ciowych
istnieje mo
ż
liwo
ść
justowania punktu
przeł
ą
czania. Nale
ż
y jednak przy tym
zawraca
ć
uwag
ę
na to,
ż
eby dla
niezawodnego działania czujnika
(inicjatora) nie nastawia
ć
zbyt du
ż
ej
odległo
ś
ci przeł
ą
czania, poniewa
ż
oscylator RC jest wtedy niestabilny.
Taki stan jest widoczny wskutek
zwi
ę
kszonej histerezy (h > 0,1·S
n
)
działania czujnika, tzn.
ż
e s
ą
ró
ż
ne
punkty przeł
ą
czania przy zbli
ż
aniu i
oddalaniu elementu pobudzaj
ą
cego.
Pojemno
ś
ciowe czujniki zbli
ż
eniowe
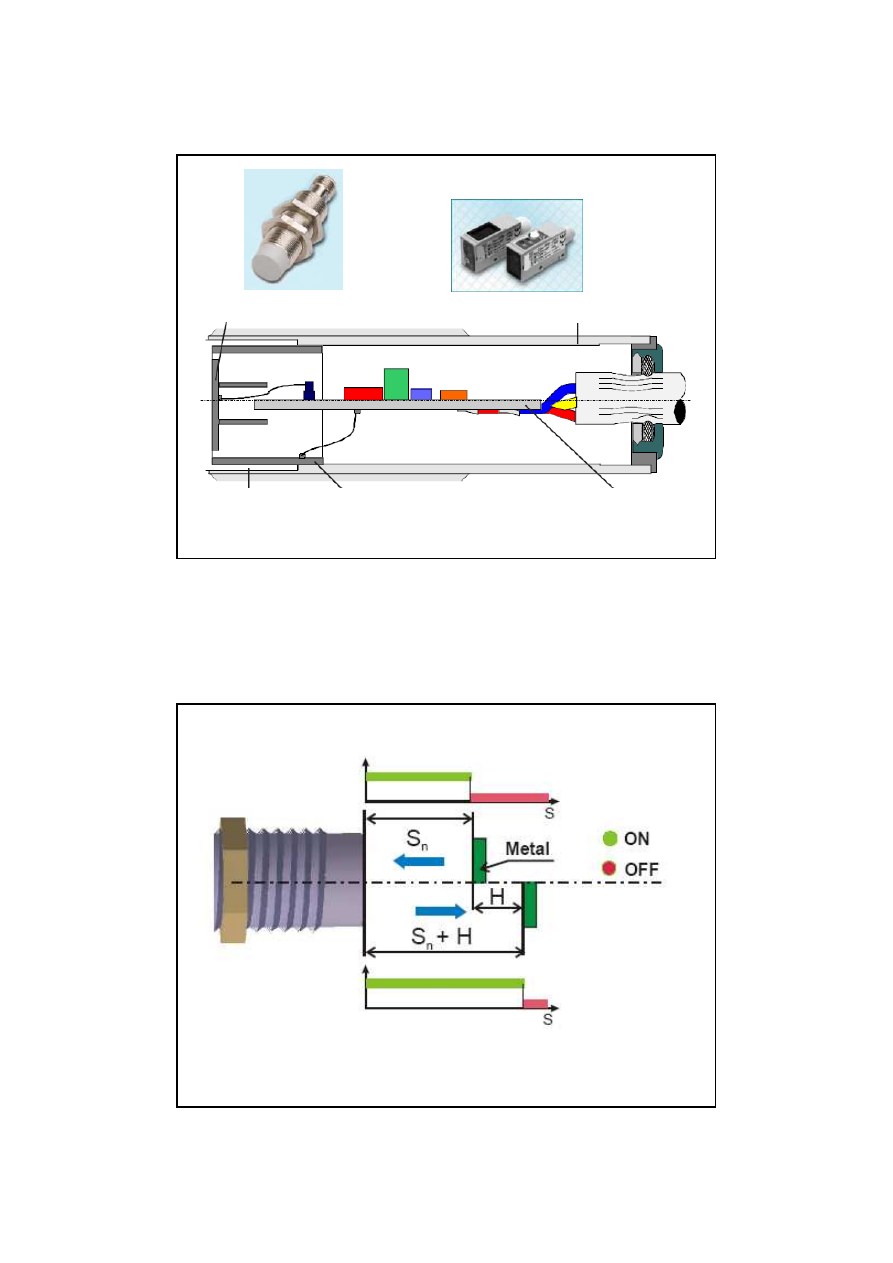
37
Przykłady pojemno
ś
ciowych
czujników zbli
ż
eniowych
O budowie
cylindrycznej
O budowie
pryzmatycznej
Budowa cylindrycznego pojemno
ś
ciowego czujnika
zbli
ż
eniowego (przekrój wzdłu
ż
ny)
Elektroda czujnika
Obudowa (tulejka)
Wspornik
Ekranowanie kubkowe (mosi
ą
dz)
Głowica
Histereza w czujnikach zbli
ż
eniowych
(indukcyjnych, pojemno
ś
ciowych)
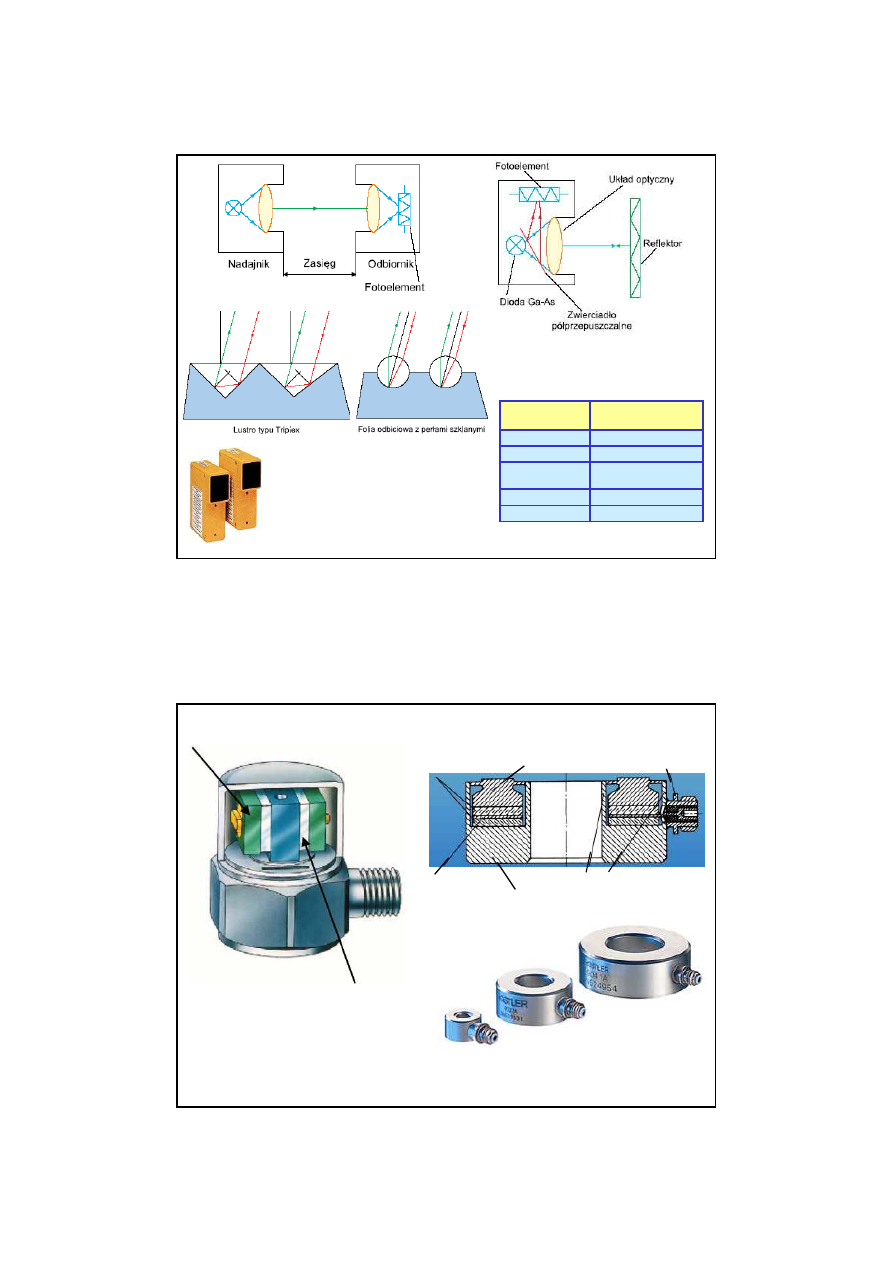
38
Schemat ideowy bariery
ś
wietlnej jednodrogowej
Czujniki optoelektroniczne
0,1
Karton, czarny
0,5
PVC
1,0 ÷ 1,8
Aluminium,
czarne
1,2 ÷ 1,8
Metal, gładki
1
Papier, biały
Warto
ść
współczynnika
korekcyjnego
Materiał
Warto
ś
ci współczynników korekcyjnych
odległo
ś
ci detekcji ró
ż
nych materiałów dla
ś
wiatła
podczerwonego w sondach optoelektronicznych
Schemat ideowy odbiciowej bariery
ś
wietlnej
Sposób działania retro-reflektorów
Przykład
jednodrogowej
bariery
ś
wietlnej
Masa sejsmiczna
Element
piezoelektryczny
Płytki kwarcowe
Elektroda
Pier
ś
cieniowa
obudowa
Gniazdo
wtykowe
Ś
cianki
obudowy
Podstawa
Piezoelektryczny
czujnik przyspiesze
ń
Piezoelektryczne
czujniki siły
Sensory piezoelektryczne przyspiesze
ń
i siły
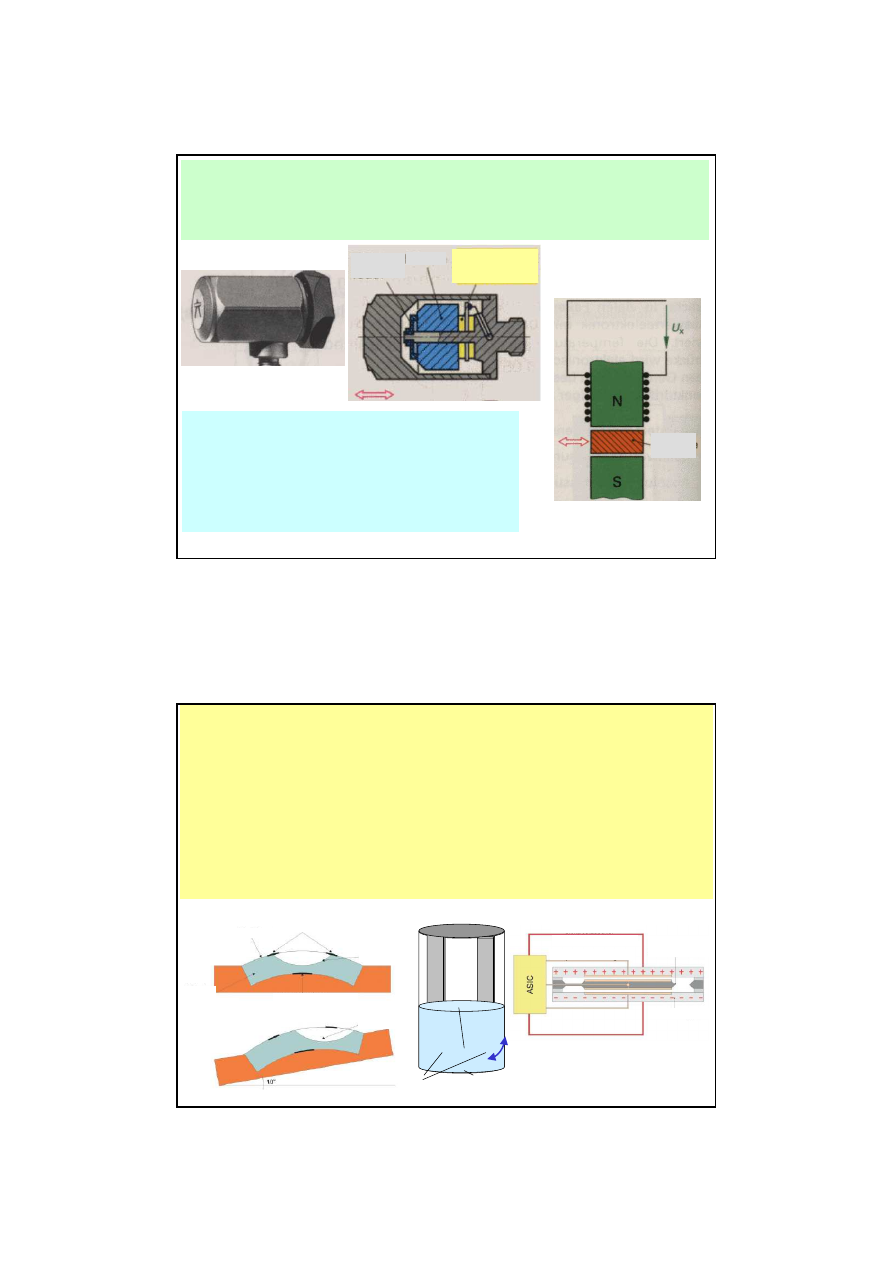
39
Pomiary przyspiesze
ń
Przyspieszenie mo
ż
na uzyska
ć
przez ró
ż
niczkowanie wyników pomiaru pr
ę
dko
ś
ci lub dwukrotne
ró
ż
niczkowanie sygnału drogi. Jednak uwidacznia si
ę
tutaj najcz
ęś
ciej problem niewystarczaj
ą
cej
rozdzielczo
ś
ci w krótkich czasach pomiaru. Inne rozwi
ą
zania czujników do pomiaru przyspiesze
ń
opieraj
ą
si
ę
na pomiarach siły w układzie spr
ęż
yna-masa. Dla przyspieszenia a masy m sił
ą
F jest zale
ż
no
ść
a = F / m. Sił
ę
F mo
ż
na zmierzy
ć
bezpo
ś
rednio za pomoc
ą
piezoelektrycznego czujnika siły. Ze wzgl
ę
du na du
żą
sztywno
ść
spr
ęż
yny czujnika piezoelektrycznego mo
ż
na uzyska
ć
wysokie cz
ę
stotliwo
ś
ci drga
ń
własnych (np. 100 kHz).
Nowe rozwi
ą
zania czujników do pomiaru przyspiesze
ń
s
ą
oparte na
zasadzie Ferraris’a. W takich czujnikach element dobrze przewodz
ą
cy
pr
ą
d elektryczny (wykonany z miedzi lub aluminium) porusza si
ę
wzgl
ę
dem cewki pomiarowej w stałym polu wzbudzenia, której rdze
ń
jest wykonany z materiału ferromagnetycznego. Wskutek pr
ą
dów
wirowych w poruszaj
ą
cym si
ę
elemencie powstaje dodatkowe,
proporcjonalne do pr
ę
dko
ś
ci pole magnetyczne. Indukowane w cewce
pomiarowej napi
ę
cie jest zmian
ą
tego pola magnetycznego i tym
samym jest proporcjonalne do przyspieszenia.
Sensor przyspieszenia oparty na
pr
ą
dach wirowych (zasada Ferraris’a
)
Piezoelektryczny sensor
przyspieszenia
Piezoelektryczny
czujnik siły
Masa
Spr
ęż
yna
talerzowa
Płytka
z Cu
Mo
ż
liwo
ś
ci zastosowania pomiaru k
ą
ta (nachylenia) rozci
ą
gaj
ą
si
ę
od maszyn budowlanych (np. d
ź
wigów),
przez maszyny do budowy dróg, nadzorowanie statków, platform wiertniczych, kominów i masztów a
ż
do
regulacji robotów. Jako nachylenie okre
ś
la si
ę
wzgl
ę
dne poło
ż
enie w stosunku do kierunku poziomego lub
pionowego. Odchylenie od nich mo
ż
na mierzy
ć
za pomoc
ą
sensorów obrotu (np.
ż
yroskop) lub nachylenia.
Jako odniesienie przy takich pomiarach w czujnikach nachylenia, zwanych równie
ż
inklinometrami, wykorzystuje
si
ę
działaj
ą
c
ą
w miejscu pomiaru grawitacj
ę
(przyspieszenie ziemskie). W zasadzie taki sposób pomiaru
odpowiada okre
ś
laniu pionu, przy czym masa ukierunkowuje si
ę
wg pola grawitacyjnego. Mo
ż
e przy tym chodzi
ć
o wahadło mechaniczne, uginaj
ą
c
ą
si
ę
beleczk
ę
lub te
ż
tak jak w poziomnicy o ciecz przewodz
ą
c
ą
pr
ą
d
elektryczny.
Magnetooporowe inklinometry wykorzystuj
ą
zjawisko zmiany oporno
ś
ci elektrycznej przewodnika w zale
ż
no
ś
ci
od pola magnetycznego. W budowie czujnika nachylenia stosuje si
ę
wahadłowe zawieszenie dwóch magnesów
w pobli
ż
u dwóch elementów magnetooporowych. Elementy te tworz
ą
dzielnik napi
ę
cia. Dla poło
ż
enia 0°
magnesy s
ą
dokładnie w
ś
rodku. Je
ż
eli ten układ pochyli si
ę
, to zmienia si
ę
poło
ż
enie wzgl
ę
dem tych
elementów. Wskutek tego zmienia si
ę
oporno
ść
, co powoduje tak
ż
e zmian
ę
sygnału wyj
ś
ciowego
(proporcjonalnie do nachylenia).
Elektroda kolektora
Elektrody emitera
Łuk szklany
P
ę
cherzyk
gazu
P
ę
cherzyk
gazu
Ciecz
przewodz
ą
ca
Poziomnica
Inklinometr magnetooporowy
Olej silikonowy
Magnesy
E
le
m
e
n
ty
m
a
g
n
e
to
o
p
o
ro
w
e
F
o
li
a
w
a
h
a
d
ła
Inklinometr pojemno
ś
ciowy
Masa
sejsmiczna
Osłona
Zmiana pojemno
ś
ci
sprz
ęż
enie zwrotne
Elektrostatyczne
ASIC (ang. Application Specific
Integrated Circuit)
Inklinometry – czujniki nachylenia
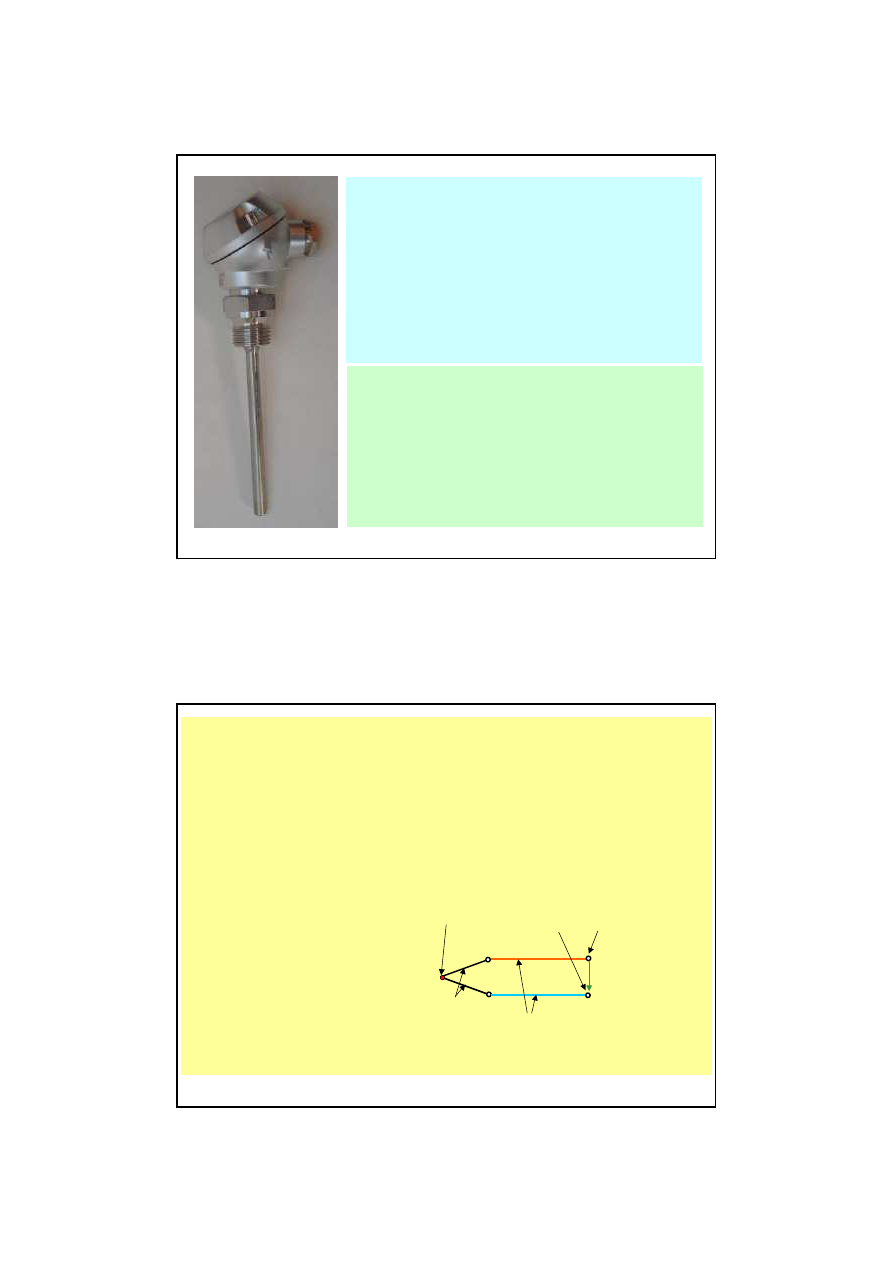
40
Pomiar temperatury – termopara Pt100
W metalach oporno
ść
elektryczna wzrasta przy
zwi
ę
kszaniu temperatury.
Zale
ż
no
ść
ta jest nast
ę
puj
ą
ca:
RT = R0 * (1 +
αααα
* DT)
RT - oporno
ść
przy temperaturze T
R0 – oporno
ść
dla 0°C
α
αα
α
– współczynnik temperaturowy (stała materiałowa)
DT – zmiana temperatury
Pomiar oporno
ś
ci elektrycznej umo
ż
liwia okre
ś
lenie
panuj
ą
cej temperatury.W zastosowaniach praktycznych
najcz
ęś
ciej wykorzystuje si
ę
standardowe moduły,
których dane s
ą
zawarte np. w normie IEC 751.
I tak np. termopara typu Pt100 przy temperaturze 0°C ma
oporno
ść
1000
Ω
. Istniej
ą
ró
ż
ne rodzaje budowy takich
termopar. Element pomiarowy jest umieszczony
w odpowiedniej, szczelnej obudowie, która ma
gwintowane przył
ą
cze.
Termoelementy
Przy pomiarach wysokich temperatur najcz
ęś
ciej stosowanymi czujnikami s
ą
termoelementy TC (ang.
Thermo Couple). S
ą
one tanie i zwarte w wytwarzaniu i wymagaj
ą
małych nakładów zwi
ą
zanych
z pomiarami.
Zjawisko termoelektryczne (efekt Seebeck’a): Je
ż
eli rozgrzeje si
ę
miejsce styku dwóch ró
ż
nych
metali, to wtedy powstaje mierzalne, zale
ż
ne od temperatury napi
ę
cie elektryczne. Ruchliwo
ść
elektronów w przewodnikach metalowych jest zale
ż
na zarówno od materiału jak i temperatury. Je
ż
eli
dwa metale s
ą
poł
ą
czone dla przewodzenia, to wtedy elektrony z jednego metalu przechodz
ą
do
drugiego. Ze wzgl
ę
du na ró
ż
n
ą
ruchliwo
ść
elektronów przej
ś
cia te nie wst
ę
puj
ą
równie cz
ę
sto. Po jednej
stronie powstaje nadmiar, a po drugiej niedobór elektronów. Wielko
ść
powstaj
ą
cego w ten sposób
napi
ę
cia jest zale
ż
na od obu materiałów i temperatury (napi
ę
cie termoelektryczne). Odnosz
ą
c warto
ś
ci
napi
ę
cia termoelektrycznego ró
ż
nych metali do platyny (Pt) otrzymuje si
ę
wzgl
ę
dny szereg napi
ę
ciowy
w [mV], tzn. odniesiony do ró
ż
nicy temperatur 1 K:
• krzem (Si)
+ 448
• chromonikiel (Cr-Ni)
+ 22
•
ż
elazo (Fe)
+ 18.8
• mied
ź
(Cu)
+ 7.5
• srebro (Sb)
+ 7.3
• platyna (Pt)
+/- 0
• nikiel (Ni)
- 15
• kobalt (Co)
- 17
• konstantan
- 32
Styk metali
(miejsce pomiaru)
Miejsce
odniesienia
(zimny styk)
+
-
U
t
Przewody wyrównawcze
Termoelement
41
Same współczynniki temperaturowe nie s
ą
ż
adnymi stałymi, lecz s
ą
zale
ż
ne od temperatury i dlatego s
ą
wa
ż
ne tylko dla małych zakresów temperatur. Dokładne przebiegi charakterystyk czuło
ś
ci termopar s
ą
zamieszczone w postaci tabel w normie. Wykorzystywane s
ą
nast
ę
puj
ą
ce typy termopar:
• typ T
mied
ź
/ mied
ź
-nikiel (+ br
ą
zowy, - biały) [40mV/K] (-200°C do +600°C),
• typ J
ż
elazo/ mied
ź
-nikiel (+ czarny, - biały) [51mV/K] (-200°C do +800 °C),
• typ K
nikiel-chrom/ nikiel (+ zielony, - biały) [40mV/K] (0°C do 1200°C),
• typ S
platyna10-rod/ platyna (+ pomara
ń
czowy, - biały) [7mV/K] (0°C do 1600°C),
• typ E
nikiel-chrom/ mied
ź
-nikiel (+ fioletowy, - biały) [62mV/K] (-200°C do + 800°C).
Ponadto s
ą
jeszcze termopary zawarte w niemieckiej normie DIN 43760:
•
nikiel-chrom/ nikiel-aluminium (chromel/ alumel), jest prawie identyczna jak typ K,
• typ U
mied
ź
/ mied
ź
-nikiel
• typ L
ż
elazo/ mied
ź
-nikiel
Termopary (termoelementy) mierz
ą
zawsze tylko ró
ż
nic
ę
temperatur pomi
ę
dzy wła
ś
ciwymi miejscami
styku (miejsce pomiaru) i miejscem odniesienia, w którym znowu wyst
ę
puje jednolity materiał
przewodz
ą
cy (np. mied
ź
). Dlatego te
ż
s
ą
stosowane albo dwa termoelementy (metoda ró
ż
nicowa) lub
temperatura jest mierzona w urz
ą
dzeniu pomiarowym za pomoc
ą
termopary Pt100 (zewn
ę
trzna
kompensacja, ang. Cold Junction Terminal).
Termoelementy s
ą
tanie i niezawodne w produkcji, wymagaj
ą
pomiaru tylko jednego napi
ę
cia, s
ą
niezale
ż
ne od oporno
ś
ci przewodów, a w technikach procesowych s
ą
najcz
ęś
ciej stosowane w
wykonaniu z obudow
ą
, w której głowicy pomiarowej jest umieszczona cała elektronika i dostarczaj
ą
standardowych sygnałów.
Rodzaje termopar
Ze wzgl
ę
du na du
żą
ró
ż
norodno
ść
sensorów konieczne jest przeprowadzenie ich klasyfikacji.
Kryteriami klasyfikacji sensorów s
ą
:
wielko
ś
ci mierzone,
zasada działania sensora,
technologia wykonania,
postacie sygnału, interfejsy,
obszary zastosowania,
własno
ś
ci, cechy charakterystyczne,
klasy jako
ś
ci,
koszty.
Ze wzgl
ę
dów aplikacyjnych wa
ż
ny jest taki podział sensorów, w którym wyst
ę
puj
ą
wielko
ś
ci mierzone (mechaniczne, termiczne, elektryczne, chemiczne i fizyczne), dla których
dobierana jest odpowiednia zasada działania sensora.
W układach mechatronicznych szczególne znaczenie maj
ą
takie sensory, które mierz
ą
wielko
ś
ci mechaniczne lub termiczne.
Działanie sensorów jest oparte na ró
ż
nych zasadach, w których wykorzystuje si
ę
wszelkiego
rodzaju zjawiska fizyczne. W niektórych przypadkach bezpo
ś
redni pomiar danej wielko
ś
ci jest
bardzo utrudniony lub wr
ę
cz niemo
ż
liwy. Wówczas stosuje si
ę
pomiar wielko
ś
ci po
ś
redniej,
która jest skutkiem działania wielko
ś
ci mierzonej.
Klasyfikacja sensorów
42
Wielko
ś
ci mierzone za pomoc
ą
czujników (sensorów) dostarczaj
ą
informacji
o stanie procesu lub zespołu maszyny (urz
ą
dzenia).
Wa
ż
nymi czynnikami, które nale
ż
y uwzgl
ę
dni
ć
przy doborze sensorów
w okre
ś
lonych warunkach ich zastosowa
ń
s
ą
m.in.:
− dokładno
ść
,
− niezawodno
ść
i odporno
ść
na warunki
ś
rodowiska,
− szybko
ść
reakcji,
− wra
ż
liwo
ść
na działanie innych (ni
ż
mierzone) czynników,
− zachowanie w czasie zał
ą
czania oraz
− rozdzielczo
ść
.
W celu zapewnienia odporno
ś
ci sensora na działanie warunków otoczenia
(
ś
rodowiska) w którym jest on wykorzystywany, stosowane s
ą
odpowiednie
wykonania jego obudowy, co jest okre
ś
lane jako stopie
ń
ochrony IP (ang.
International Protected), np. IP56.
Natomiast w przypadku pomiarów szybkozmiennych wielko
ś
ci (np. ci
ś
nienia
w komorze spalania silnika spalinowego), sensor musi si
ę
odznacza
ć
odpowiednimi własno
ś
ciami dynamicznymi (pasmo przenoszenia).
Wymagania dotycz
ą
ce sensorów
Ogólne zasady doboru sensorów
Przy wyborze sensorów do okre
ś
lonej aplikacji nale
ż
y uwzgl
ę
dni
ć
szereg czynników takich jak:
Rodzaj wymaganego pomiaru, np. wielko
ść
mierzona, jej
warto
ść
znamionowa, zakres zmian warto
ś
ci wielko
ś
ci
mierzonej, wymagana dokładno
ść
, wymagana szybko
ść
pomiarów, wymagana niezawodno
ść
oraz warunki otoczenia
w których przeprowadzane s
ą
pomiary.
Wymagan
ą
posta
ć
wielko
ś
ci wyj
ś
ciowej (sygnału) z sensora,
która okre
ś
la wymagania dotycz
ą
ce zada
ń
przetwarzania
sygnału.
Nast
ę
pnie mo
ż
na rozpatrywa
ć
sensory z uwzgl
ę
dnieniem
takich czynników jak ich zakres działania, dokładno
ść
,
liniowo
ść
, szybko
ść
reakcji, niezawodno
ść
, trwało
ść
,
konieczno
ść
obsługi, wymagania dotycz
ą
ce zasilania
elektrycznego, zwarto
ść
budowy, dyspozycyjno
ść
i koszty.
43
Obszar zastosowania sensorów jest okre
ś
lony ich statycznymi i dynamicznymi własno
ś
ciami
(wła
ś
ciwo
ś
ciami pomiarowymi) oraz mechanicznymi, cieplnymi i chemicznymi czynnikami
oddziałuj
ą
cymi. Ponadto, oprócz uwzgl
ę
dnienia aspektów technicznych, istotne znaczenie
maj
ą
wzgl
ę
dy ekonomiczne.
W wyniku selekcji wielu sensorów dokonywany jest wybór jednego sensora, który spełnia
minimalne wymagania zadania pomiarowego, przy uwzgl
ę
dnieniu aspektów technicznych
i ekonomicznych.
Dobór wła
ś
ciwego sensora dla układu mechatronicznego ma istotne znaczenie dla
poprawno
ś
ci działania tego układu i uzyskiwanych efektów.
Doboru sensora dokonuje si
ę
w siedmiu nast
ę
puj
ą
cych krokach:
1. Warunki pomiaru i ogólne wymagania dotycz
ą
ce sensora oraz wpływ otoczenia i
warunków ograniczaj
ą
cych.
2. Okre
ś
lenie mo
ż
liwych zasad działania sensora.
3. Sprawdzenie własno
ś
ci pomiarowych wybranych zasad działania.
4. Sprawdzenie dopuszczalnych bł
ę
dów wybranych zasad pomiaru wzgl. sensorów.
5. Sprawdzenie mocy sygnału sensora (moc elektryczna) wzgl. konieczno
ś
ci jego
zasilania.
6. Sprawdzenie czynników ekonomicznych i innych.
7. Okre
ś
lenie typu sensora.
Zasady doboru sensorów
Krok 1:
Krok 1: Warunki pomiaru i ogólne wymagania dotycz
ą
ce sensora oraz wpływ
otoczenia i warunków ograniczaj
ą
cych
Post
ę
powanie wykonywane w tym kroku ma na celu sprecyzowanie wymaga
ń
dotycz
ą
cych
sensora wzgl. układu pomiarowego. Dla ka
ż
dego przypadku zastosowania (aplikacji)
nale
ż
y rozpatrzy
ć
nast
ę
puj
ą
ce aspekty:
Gdzie b
ę
dzie zastosowany sensor?
Jak ci
ęż
kie s
ą
nast
ę
pstwa awarii sensora? (odpowiedzialno
ść
producenta za produkt)
Jakie wielko
ś
ci maj
ą
by
ć
mierzone?
Czy wielko
ś
ci mierzone maj
ą
charakter statyczny czy dynamiczny?
Jak wysokie s
ą
wymagania dotycz
ą
ce: powtarzalno
ś
ci, rozdzielczo
ś
ci, ustawiania punktu
zerowego, minimalnej i maksymalnej cz
ę
sto
ś
ci pomiarów?
Jakie panuj
ą
warunki otoczenia? (temperatura, wilgotno
ść
, ci
ś
nienie, przyspieszenie,
materiały chemiczne, czysto
ść
, ...)
Czy wyst
ę
puj
ą
elektryczne lub magnetyczne pola zakłócaj
ą
ce?
Jakiej wielko
ś
ci i masy nie powinien przekracza
ć
sensor?
Jak du
ż
a powinna by
ć
trwało
ść
sensora?
Czy wskazana jest mo
ż
liwo
ść
wymiany i kalibracji sensora?
Jak sensor b
ę
dzie wł
ą
czony w cały system mechatroniczny?
Zasady doboru sensorów – krok 1
44
Krok 2:
Krok 2: Okre
ś
lenie mo
ż
liwych zasad działania sensora
Z wymaga
ń
dotycz
ą
cych sensora wynikaj
ą
mo
ż
liwe zasady jego działania. Mo
ż
liwe rodzaje pomiaru dla sensora
(fizyczne zasady jego działania) s
ą
silnie uzale
ż
nione od fizycznego charakteru wielko
ś
ci mierzonej oraz
spodziewanych czynników zakłócaj
ą
cych
.
Zasady doboru sensorów – kroki 2 - 4
Krok 3:
Krok 3: Sprawdzenie własno
ś
ci pomiarowych wybranych zasad działania sensora
W tej fazie doboru sensora uwzgl
ę
dnia si
ę
nast
ę
puj
ą
ce czynniki:
zakres pomiarowy,
maksymaln
ą
zmian
ę
wielko
ś
ci mierzonej,
rozdzielczo
ść
sygnału pomiarowego,
warto
ść
progow
ą
(najmniejszy sygnał).
Krok 4:
Krok 4: Sprawdzenie dopuszczalnych bł
ę
dów wybranych zasad pomiaru wzgl
ę
dnie
sensorów
Całkowity bł
ą
d sensora jest okre
ś
lony jego własno
ś
ciami statycznymi i dynamicznymi, które nale
ż
y
sprawdzi
ć
. Własno
ś
ci statyczne takie jak: nieliniowo
ść
, histereza, termiczny dryft zera oraz zmiany
czuło
ś
ci spowodowane czynnikami termicznymi okre
ś
laj
ą
dokładno
ść
statycznych i quasi statycznych
pomiarów. Pomiary statyczne wymagaj
ą
dolnej cz
ę
stotliwo
ś
ci granicznej 0 Hz, natomiast pomiary quasi
statyczne w zale
ż
no
ś
ci od dynamiki procesu wymagaj
ą
dolnej cz
ę
stotliwo
ś
ci granicznej kilku Hz. Statyczny bł
ą
d
całkowity sensora w danych warunkach pomiaru nie mo
ż
e przekracza
ć
okre
ś
lonej warto
ś
ci (np. ± 5% warto
ś
ci
ko
ń
cowej zakresu pomiarowego). Sensory o dobrych własno
ś
ciach pomiarowych, tzn. gdy czas nastawiania
sensora jest znacznie mniejszy od czasu narastania sygnału, s
ą
wymagane dla szybkich dynamicznych
przebiegów sygnałów. Dzi
ę
ki temu sensor ma górn
ą
cz
ę
stotliwo
ść
graniczn
ą
o warto
ś
ci znacznie wi
ę
kszej ni
ż
najwy
ż
sza cz
ę
stotliwo
ść
składowej widmowej zawartej w sygnale. Dolna cz
ę
stotliwo
ść
graniczna sensora ze
wzgl
ę
du na zawarto
ść
składowej stałej w sygnale powinna wynosi
ć
0 Hz. Natomiast w przypadku pomiarów
czysto dynamicznych wielko
ś
ci mo
ż
na stosowa
ć
sensory o dolnej cz
ę
stotliwo
ś
ci granicznej wy
ż
szej od zera.
Krok 5:
Krok 5: Sprawdzenie mocy sygnału sensora (moc elektryczna) wzgl
ę
dnie konieczno
ś
ci
jego zasilania
W ramach oceny przeprowadzanej w tej fazie doboru sensora rozpatruje si
ę
potrzeb
ę
:
elektronicznego wzmocnienia sygnału pomiarowego,
ekranowania (kompatybilno
ść
elektromagnetyczna).
Zasady doboru sensorów – kroki 5 - 7
Krok 6:
Krok 6: Sprawdzenie czynników ekonomicznych i innych aspektów dotycz
ą
cych
sensora
Nast
ę
pnie ocenia si
ę
nast
ę
puj
ą
ce czynniki dotycz
ą
ce wyboru sensora:
koszt zakupu/ wykonania sensora,
nakłady zwi
ą
zane z piel
ę
gnacj
ą
,
bezpiecze
ń
stwo pracy,
niezawodno
ść
,
trwało
ść
(
ż
ywotno
ść
).
Krok 7:
Krok 7: Okre
ś
lenie typu sensora
Na zako
ń
czenie procesu doboru sensora dokonuje si
ę
wyboru konkretnego typu sensora,
który zostanie zastosowany w budowanym układzie mechatronicznym.
45
Znaczenie ró
ż
nych wymaga
ń
w konwencjonalnych czujnikach i sensorach
Sensor zamienia mierzon
ą
wielko
ść
fizyczn
ą
i jej zmiany na sygnał elektryczny i jego zmiany oraz
przetwarza go w taki sposób, aby mo
ż
na go było łatwo transmitowa
ć
i dalej przetwarza
ć
.
Bardzo po
żą
dane
-
Próbkowanie – zamiana
na posta
ć
cyfrow
ą
(digitalizacja)
Bardzo po
żą
dana
-
Zdolno
ść
integracyjna
Korygowalna
Zupełnie niedopuszczalna
Zale
ż
no
ść
od innych
czynników (wielko
ś
ci)
Mało wa
ż
na
Decyduj
ą
ca
Liniowo
ść
Przy digitalizacji mało
podatny na zakłócenia
Rozstrzygaj
ą
ca
Odporno
ść
na zakłócenia
Rozstrzygaj
ą
cy
Rozstrzygaj
ą
cy
Stosunek szumu
(zakłóce
ń
) do sygnału
Mało wa
ż
ny
Mo
ż
liwie wysoki
Poziom sygnału
wyj
ś
ciowego
Mo
ż
liwie małe
Mało istotne
Koszty
Sensor
Konwencjonalny czujnik
Cecha
Konwencjonalnymi
obszarami
zastosowania sensorów
s
ą
:
automatyzacja,
technika procesowa,
robotyka,
technika pomiarowa,
technika sterowania
i regulacji.
Jednak wraz z rosn
ą
c
ą
miniaturyzacj
ą
sensorów s
ą
one coraz
cz
ęś
ciej stosowane
tak
ż
e w innych
obszarach, takich jak
np. medycyna i ochrona
ś
rodowiska.
Obszary zastosowania sensorów
Inne obszary
Inne obszary
zastosowania
zastosowania
sensorów
sensorów
Technika
domowa i
klimatyzacyjna
Sprz
ę
t
gospodarstwa
domowego
Technika
medyczna
Samochody
Pojazdy
szynowe
Ochrona
ś
rodowiska
46
Element czujnikowy (mierz
ą
cy) i przetwarzanie sygnałów w obecnych sensorach s
ą
obecnie
wbudowane w małej przestrzeni. W budowie sensorów wykorzystywane s
ą
technologie i do
ś
wiadczenia
stosowane w wytwarzaniu zminiaturyzowanych układów scalonych. Szczególnie du
ż
e mo
ż
liwo
ś
ci w
budowie sensorów daje zastosowanie technologii mikrosystemów MEMS (ang. mechanical-elektro-
micro-system).
Perspektywy rozwoju czujników (sensorów)
Nowe
Nowe
sensory
sensory
Materiał sensora:
Materiał sensora:
• ceramika,
• metale amorficzne,
• włókna optyczne
(
ś
wiatłowody),
• bio-składniki.
Technologie
Technologie
:
:
• techniki SMD I hybrydowe,
• technika projektowania IC,
• laserowe,
• mikroobróbka.
Koncepcja
Koncepcja
s
s
ensor
ensor
a:
a:
• mikrostruktury,
• transmitery typu
Smart,
• sensory inteligentne
(zaawansowane),
• układy
wielosensoryczne.
Kommunika
Kommunika
cja
cja
:
:
• technika 2-przewodowa,
• programowanie
okablowania,
• interfejsy,
• przył
ą
cze magistrali.
SMD
SMD (ang. Surface Mounted Device) – monta
ż
powierzchniowy
IC
IC (ang. Integrated circuit) – układ scalony
Wyszukiwarka
Podobne podstrony:
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 5 (2)
MTR 2009 Wstep do mechatr cz 7 (2)
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 6
MTR 2009 Wstep do mechatr cz 2 (2)
MTR 2009 Wstep do mechatr cz 4 (2)
MTR 2009 Wstep do mechatr cz 8 Nieznany
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 5
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 3
MTR 2009 Wstep do mechatr cz 4
MTR 2009 Wstep do mechatr cz 7
MTR 2009 Wstep do mechatr cz 8
MTR 2011 Wstep do mechatr cz 8
MTR 2011 Wstep do mechatr cz 1
Wstęp do MATLABA cz 1
więcej podobnych podstron