1
Politechnika Wrocławska
W y d z i a ł M e c h a n i c z n y
W y d z i a ł M e c h a n i c z n y
Instytut Technologii Maszyn i Automatyzacji
Kierunek studiów:
Mechatronika
Mechatronika
Studia I-stopnia, rok I, sem. 2, rok akad. 2008/09
Materiały do wykładu „
Wst
ę
p do
Wst
ę
p do
mechatroniki
mechatroniki”
Sterowniki (PLC, CNC, RC), mikrokontrolery,
systemy wbudowane ES, sieci komunikacyjne
Dr in
ż
. Zbigniew Smalec (p. 3.19 B-4)
Cz
ęść
4 (1 – 89)
Wrocław, 2009
Rodzaje zada
ń
automatyzacji realizowanych przez
sterowniki (komputery) przemysłowe
Ogólne zadania sterowników (komputerów) przemysłowych:
Ogólne zadania sterowników (komputerów) przemysłowych:
Sterowanie przebiegiem procesów,
Zadania regulacji.
Wymagania czasu
Wymagania czasu
rzeczywistego
rzeczywistego
Kierowanie procesami, zarz
ą
dzanie
recepturami,
Interfejs człowiek-maszyna (HMI),
Planowanie i sterowanie produkcj
ą
,
Archiwizacja i oddziaływanie na
wsad (wytop) procesu.
Brak
Brak
wymaga
ń
czasu
wymaga
ń
czasu
rzeczywistego
rzeczywistego
2
Wymagania komputerowych sterowników przemysłowych
stosowanych w systemach automatyzacji
Ogólne wymagania systemów mechatronicznych dotycz
ą
w
szczególno
ś
ci sterowników (komputerów) przemysłowych.
Zdolno
ść
do pracy w czasie rzeczywistym:
Zdolno
ść
do pracy w czasie rzeczywistym:
systemy operacyjne, architektura pami
ę
ci.
Wprowadzanie
Wprowadzanie
–
–
wyprowadzanie sygnałów procesu:
wyprowadzanie sygnałów procesu:
przył
ą
czenie sensorów i elementów wykonawczych, systemy
komunikacyjne.
Pewno
ść
i niezawodno
ść
działania:
Pewno
ść
i niezawodno
ść
działania:
wysokiej jako
ś
ci składniki, układy redundantne.
Odporno
ść
na oddziaływanie otoczenia:
Odporno
ść
na oddziaływanie otoczenia:
specjalne obudowy, monta
ż
przewodów ł
ą
cz
ą
cych.
Rodzaje sterowników przemysłowych
W zasadzie sterowniki przemysłowe s
ą
klasyfikowane ze
W zasadzie sterowniki przemysłowe s
ą
klasyfikowane ze
wzgl
ę
du na swoj
ą
budow
ę
oraz realizowane przez nie funkcje.
wzgl
ę
du na swoj
ą
budow
ę
oraz realizowane przez nie funkcje.
Budowa
Budowa
System kompaktowy,
System modułowy,
System specjalny.
Kryteria doboru:
Kryteria doboru:
Liczba I/O (ang. Input/ Output),
Przestrze
ń
do zabudowy,
Mo
ż
liwo
ść
rozbudowy,
Wymagana moc obliczeniowa.
Funkcje
Funkcje
Sterowanie procesem:
• dyskretnie,
• analogowo,
Sterowanie torem ruchu,
Interfejs u
ż
ytkownika.
Kryteria doboru:
Kryteria doboru:
Zadanie automatyzacji,
Spektrum zada
ń
(IPC).
3
Obecne komputery przemysłowe składaj
ą
si
ę
z architektur mikroprocesorowych.
Zale
ż
nie od budowy mo
ż
na wyró
ż
ni
ć
nast
ę
puj
ą
ce podstawowe typy
komputerów:
1. Systemy jednopłytkowe ES (ang. Embedded Systems), systemy okrojone
do realizacji jednego zadania, najcz
ęś
ciej z mikrokontrolerem jako jednostk
ą
centraln
ą
.
2. Systemy PC (Personal Computer).
3. Modułowe systemy mikrokomputerowe, skalowalne systemy
mikrokomputerowe dla ró
ż
nych zada
ń
automatyzacji.
4. Komputerowe sterowniki przemysłowe, np. CNC, RC, PLC, systemy
komputerowe okrojone do realizacji zada
ń
sterowania i regulacji.
We wszystkich przypadkach zawieraj
ą
one:
j
ą
dro mikroprocesorowe, procesory sygnałowe lub mikrokontrolery
(mikrosterowniki),
pami
ęć
,
Interfejsy do urz
ą
dze
ń
peryferyjnych,
magistral
ę
systemow
ą
.
Podstawowe typy komputerów (sterowników)
Wymagania funkcjonalne sterowników przemysłowych
Sterowanie przebiegiem procesów:
Sterowanie przebiegiem procesów:
Przetwarzanie sygnałów procesu,
Jeden program aplikacyjny, który jest „parametryzowany” przez dane procesu,
Sterownik swobodnie programowalny PLC
Sterownik swobodnie programowalny PLC (ang. Programmable Logical
Controller).
Kształtowe sterowanie ruchem (obrabiarki, roboty):
Kształtowe sterowanie ruchem (obrabiarki, roboty):
Przetwarzanie danych geometrycznych,
Ró
ż
ne pogramy technologiczne dla ka
ż
dego przedmiotu (procesu),
Układ sterowania numerycznego CNC
Układ sterowania numerycznego CNC (ang. Computerized Numerical Control),
RC
RC (ang. Robot Control).
Zadania ogólne (wł
ą
cznie z wy
ż
ej wymienionymi):
Zadania ogólne (wł
ą
cznie z wy
ż
ej wymienionymi):
Obsługa i obserwacja, technika kierowania wytwarzaniem,
Du
ż
a ró
ż
norodno
ść
aplikacyjna,
Przemysłowy komputer (PC) IPC
Przemysłowy komputer (PC) IPC (ang. Industrial Personal Computer).
4
Techniczne mo
ż
liwo
ś
ci realizacji układów sterowania
Układ sterowania programowany przez poł
ą
czenia
Wcze
ś
niej
Wcze
ś
niej
Obecnie
Obecnie
elektromechaniczny
elektroniczny
Zbudowany z
styczników, przeka
ź
ników, ...
tranzystorów,
zintegrowanych
układów scalonych, ..
Program zawarty w
okablowaniu
Zalety i wady
Wysokie zu
ż
ycie energii, du
ż
e zapotrzebowanie
miejsca, trudna rozbudowa
Sterownik
swobodnie
programowalny PLC
Procesora, pami
ę
ci,
magistrali
oprogramowaniu
Elastyczno
ść
Zastosowanie sterownik
Zastosowanie sterownik
ó
ó
w
w
komputerowych (np.
komputerowych (np.
PLC
PLC
)
)
w uk
w uk
ł
ł
adach sterowania, w por
adach sterowania, w por
ó
ó
wnaniu z uk
wnaniu z uk
ł
ł
adami
adami
konwencjonalnymi, ma nast
konwencjonalnymi, ma nast
ę
ę
puj
puj
ą
ą
ce zalety:
ce zalety:
mo
ż
liwo
ść
powtórnego wykorzystywania napisanych programów,
modułowa i blokowa budowa programów, co znacznie skraca czas
wykonania aplikacji,
mo
ż
liwo
ść
elektronicznego dokumentowania realizowanych
aplikacji,
mo
ż
liwo
ść
nadzorowania i diagnostyki podczas przebiegu procesu,
oszcz
ę
dno
ść
czasu podczas wykonywania projektu układu
sterowania i opracowywania oprogramowania,
du
ż
a niezawodno
ść
działania,
prosta i szybka instalacja oraz małe gabaryty,
niskie koszty budowy.
Zalety zastosowania sterowników komputerowych
5
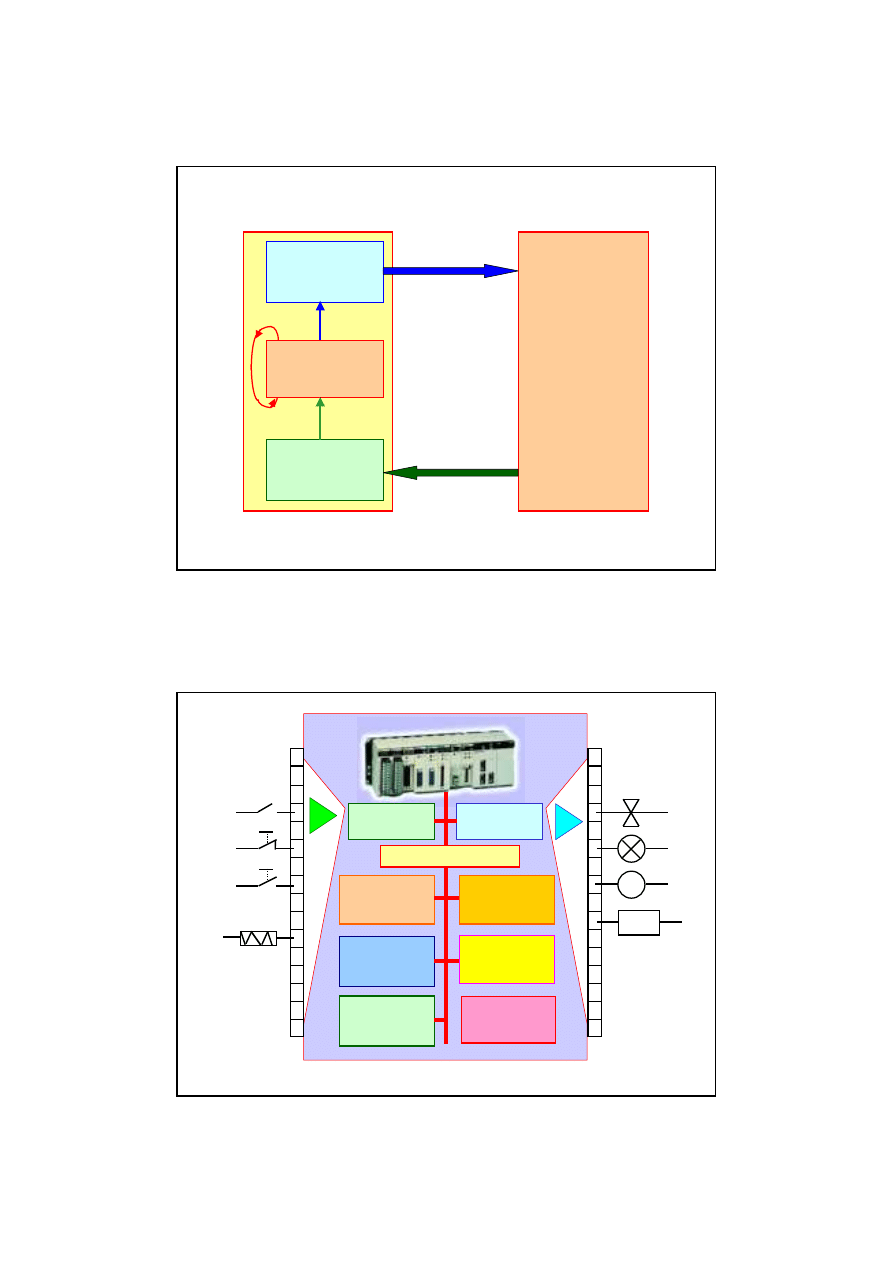
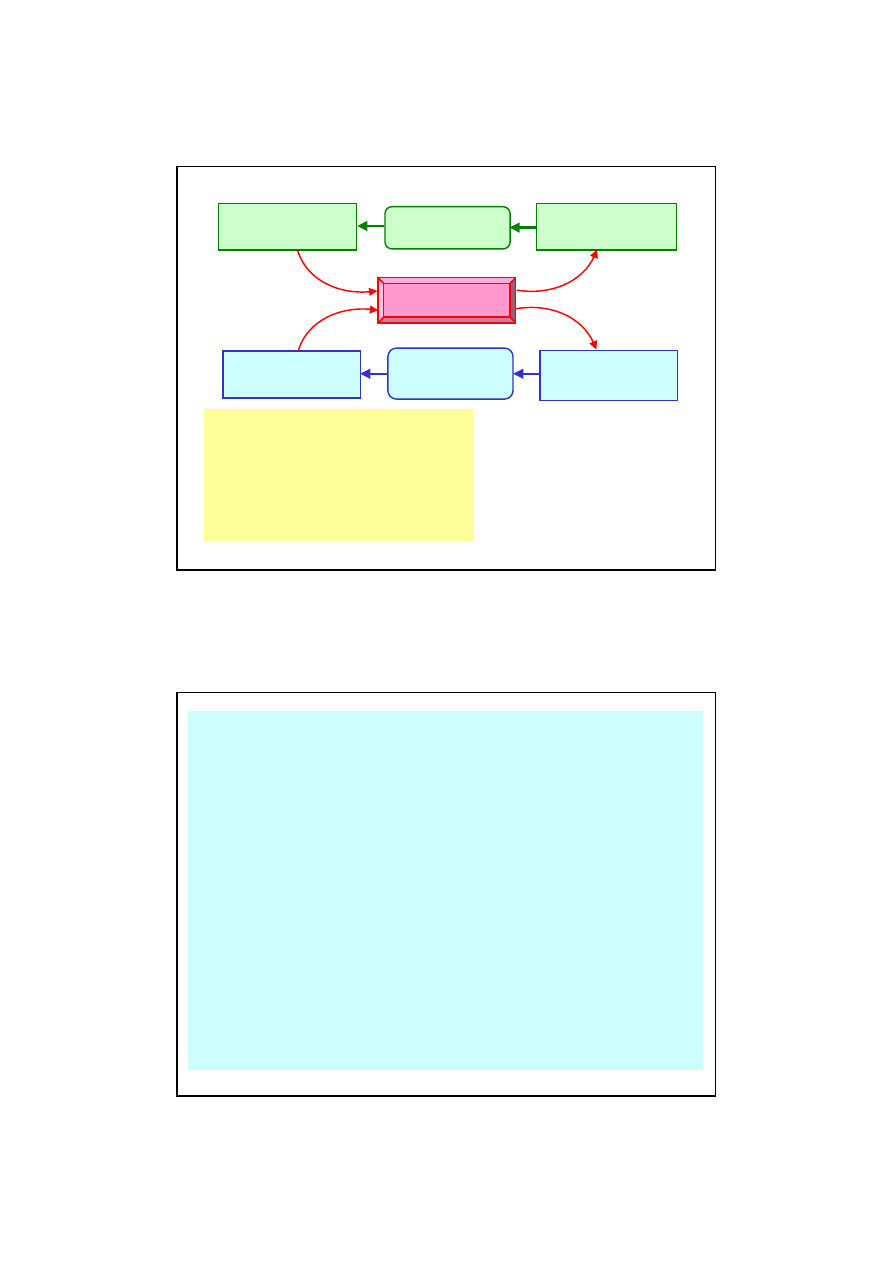
Obraz procesu
Obraz procesu
w pami
ę
ci
w pami
ę
ci
wyj
ś
ciowej
wyj
ś
ciowej
Obraz procesu
Obraz procesu
w pami
ę
ci
w pami
ę
ci
wej
ś
ciowej
wej
ś
ciowej
Program
Program
aplikacyjny
aplikacyjny
PLC
PLC
Proces w
Proces w
systemie
systemie
technicznym
technicznym
Sygnały do
elementów
wykonawczych
Sygnały z
czujników
(sensorów)
Cykliczna praca sterownika PLC
Sprz
ę
towe składniki PLC
Moduły
wej
ś
ciowe
Moduły
wyj
ś
ciowe
Magistrala systemowa
Pami
ęć
programu
(EEPROM, RAM)
CPU (Procesor
słowowy,
bitowy)
Interfejs
komputerowy
(V.24, RS485)
Pami
ęć
systemowa
(ROM)
Pami
ęć
danych
(RAM)
Zasilacz
Zasilacz
binarne,
binarne,
analogowe
analogowe
i cyfrowe
i cyfrowe
sygnały
sygnały
binarne,
binarne,
analogowe
analogowe
i cyfrowe
i cyfrowe
sygnały
sygnały
Wł
ą
czniki
Przyciski
Bariera
ś
wietlna
.
.
.
M
924
Zawór
Lampka
Silnik
Wska
ź
nik
.
.
.
6
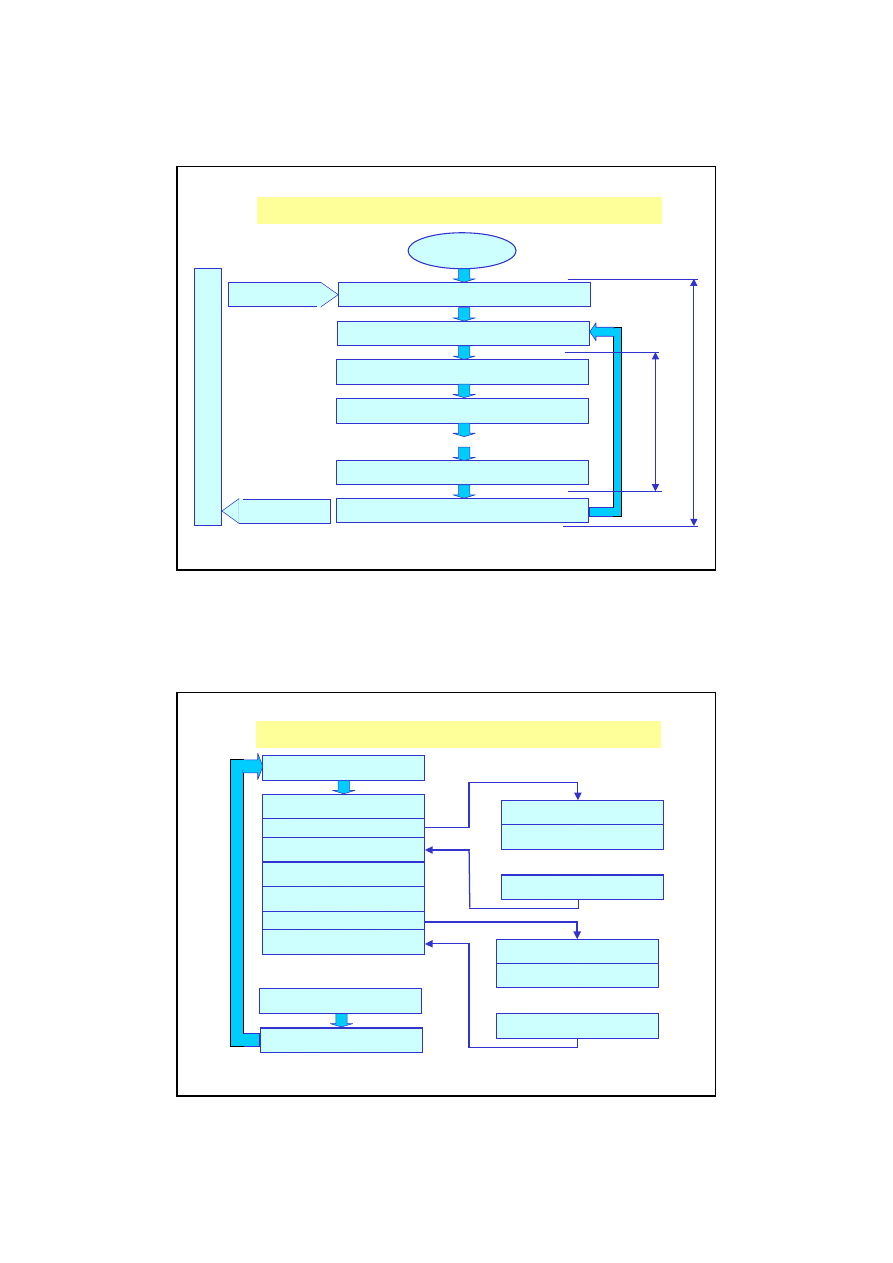
Sposób działania sterownika PLC
Cykliczne przetwarzanie programu
Cykliczne przetwarzanie programu
PLC
PLC
Utworzenie stanu pocz
ą
tkowego
Zał
ą
czenie
Aktualizacja sygnałów wej
ś
ciowych
Wykonanie 1. instrukcji
Wykonanie 2. instrukcji
Wykonanie ostatniej instrukcji
Transmisja sygnałów wyj
ś
ciowych
. . .
Zapis wyj
ść
Zapis wej
ść
F
iz
y
c
z
n
y
p
ro
c
e
s
C
z
a
s
w
y
k
o
n
a
n
ia
j
e
d
n
e
g
o
p
e
łn
e
g
o
c
y
k
lu
p
ro
g
ra
m
u
C
z
a
s
p
rz
e
b
ie
g
u
p
ro
g
ra
m
u
Cykliczne przetwarzanie programu
Cykliczne przetwarzanie programu
PLC
PLC
Odczyt wej
ść
Odczyt wej
ść
Instrukcja
Wywołanie podprogramu 1
Instrukcja
Instrukcja
Instrukcja
Wywołanie podprogramu n
Instrukcja
Ustawienie wyj
ść
Ustawienie wyj
ść
Instrukcja
. . .
Podprogram 1
Instrukcja
. . .
Powrót
Podprogram n
Instrukcja
. . .
Powrót
Realizacja programu w sterowniku PLC
7
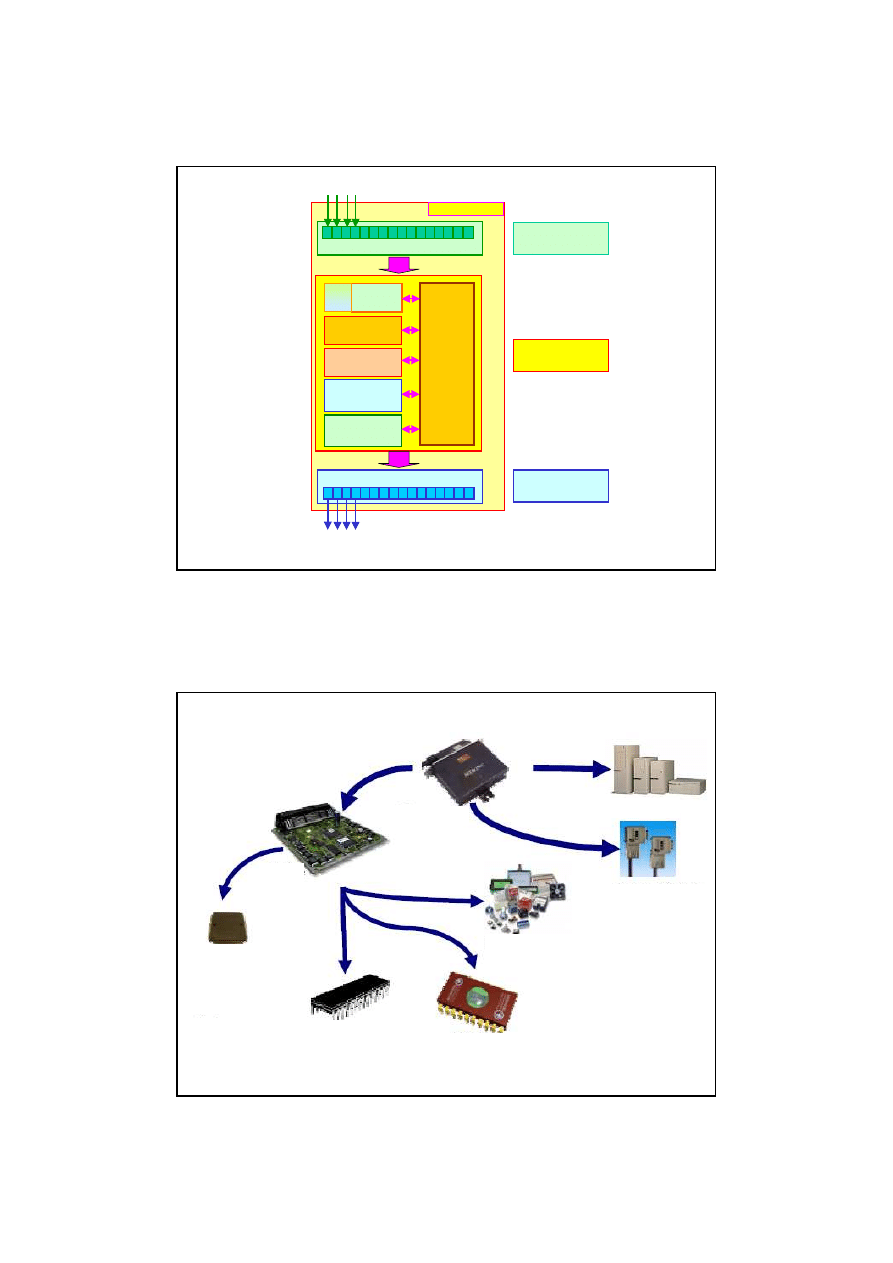
Sensory, dajniki sygnałów
Sterownik
Moduł
wprowadzania
Moduł
wyprowadzania
Jednostka
przetwarzaj
ą
ca
Obraz
procesu
Merker
AKKU
Licznik
adresów
Człony
czasowe
Człony wykonawcze (aktuator’y)
M
e
c
h
a
n
iz
m
M
e
c
h
a
n
iz
m
o
b
li
c
z
e
n
io
w
y
o
b
li
c
z
e
n
io
w
y
Separacja galwaniczna
Separacja galwaniczna
Magistrala
Magistrala
I
/
Q
Budowa sterownika PLC
Budowa sterownika przemysłowego
Zewn
ę
trzna RAM
Zewn
ę
trzna ROM
Mikrokontroler
(
µµµµ
C) wzgl.
mikroprocesor
(
µµµµ
P)
Płyta
Sterownik
Komunikacja
Obudowa
Pozostałe urz
ą
dzenia
peryferyjne i moduły
8
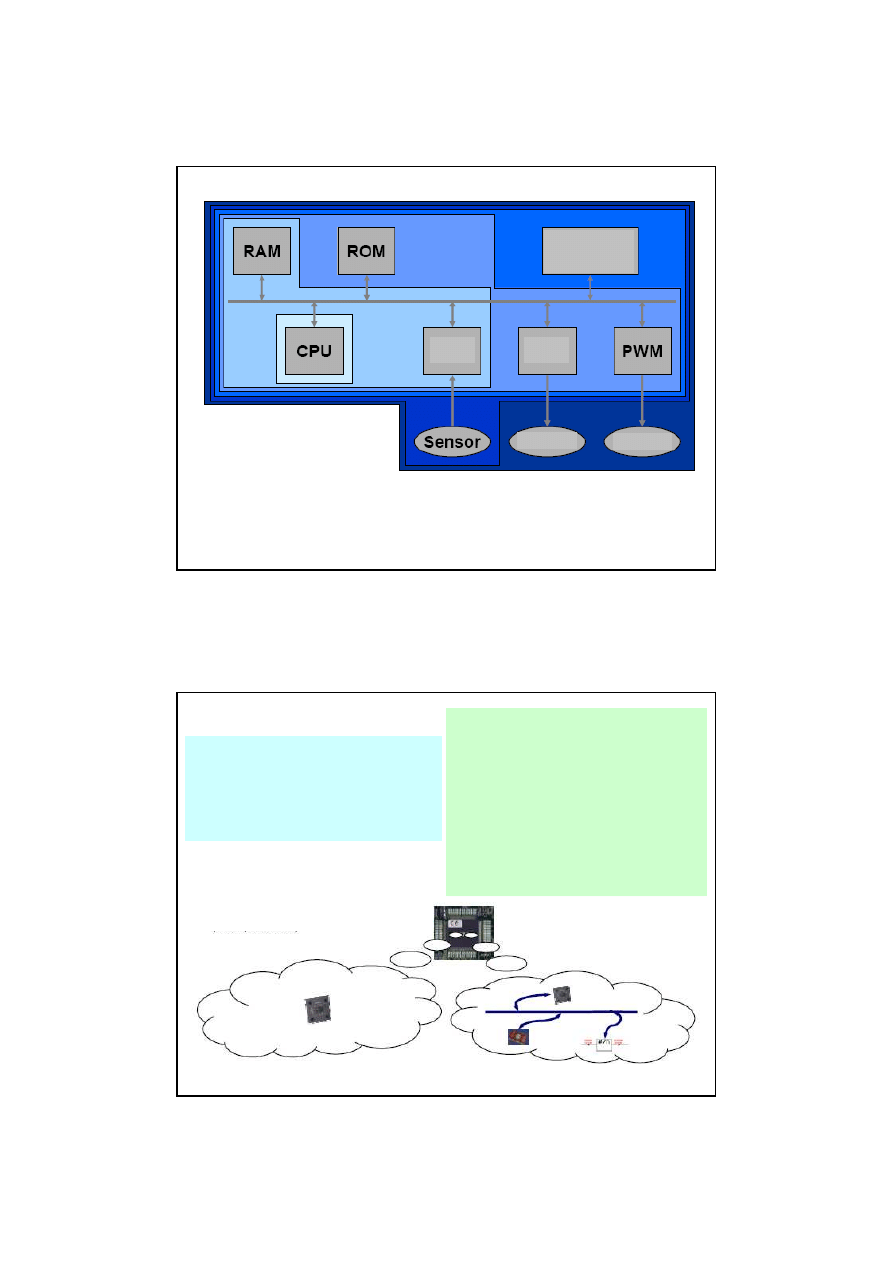
Budowa mikrokontrolerów
Fieldbus
(np. CAN)
Aktuator
Aktuator
A/C
C/A
RAM, ROM – pami
ę
ci
CPU – jednostka centralna
A/C – przetwornik analogowo-cyfrowy
C/A – przetwornik cyfrowo-analogowy
PWM – modulacja szeroko
ś
ci
impulsów
Logiczna jednostka centralna CPU
(ang. Central Processor Unit)
urz
ą
dzenia steruj
ą
cego,
Małe gabaryty (µP
⇒
procesor),
Na jednym układzie (Chip’ie).
Mikrokomputer jednoukładowy (Single
Chip),
Pełny komputer na jednym układzie
składaj
ą
cy si
ę
(minimum) z:
• mikroprocesora (µP),
• wewn
ę
trznej pami
ę
ci,
• urz
ą
dze
ń
peryferyjnych I/O (ang.
Input/Output),
• magistrali systemowej.
Mikrokontroler
⇔
⇔
⇔
⇔
mikroprocesor
µC
(mikrokontroler)
µP
(mikroprocesor)
9
Budowa systemu mikrokomputerowego
Mechanizm steruj
ą
cy
Mechanizm obliczeniowy
Jednostka centralna (CPU)
Jednostka centralna (CPU)
Pami
ęć
główna
Pami
ęć
główna
(dla programów i danych)
Interfejsy wej
ść
/
Interfejsy wej
ść
/
wyj
ść
wyj
ść
Urz
ą
dzenie ł
ą
cz
ą
ce
Urz
ą
dzenie ł
ą
cz
ą
ce
(Magistrala systemowa)
Urz
ą
dzenia
peryferyjne
Mikroprocesor
Mikroprocesor
Mikrokomputer
Mikrokomputer
System mikrokomputerowy
System mikrokomputerowy
Koszty odgrywaj
ą
istotn
ą
rol
ę
.
Nie s
ą
stosowane najszybsze i najnowsze
procesory, lecz takie, które spełniaj
ą
postawione
zadanie przy minimalnych kosztach.
Zegar
Jednostka centralna
(CPU)
Pami
ęć
programu (ROM
lub FLASH)
Pami
ęć
danych
(np. SRAM)
Układy wej
ść
/
wyj
ść
i peryferyjne
Rezonator
kwarcowy
RESET
RESET
Zasilanie
Sygnały
wej
ś
ciowe
Sygnały
wyj
ś
ciowe
Wewn
ę
trzna
magistrala
adresowa
Wewn
ę
trzna
magistrala
danych
m
m
n
n
.
.
.
.
.
.
Budowa mikrokontrolera
10
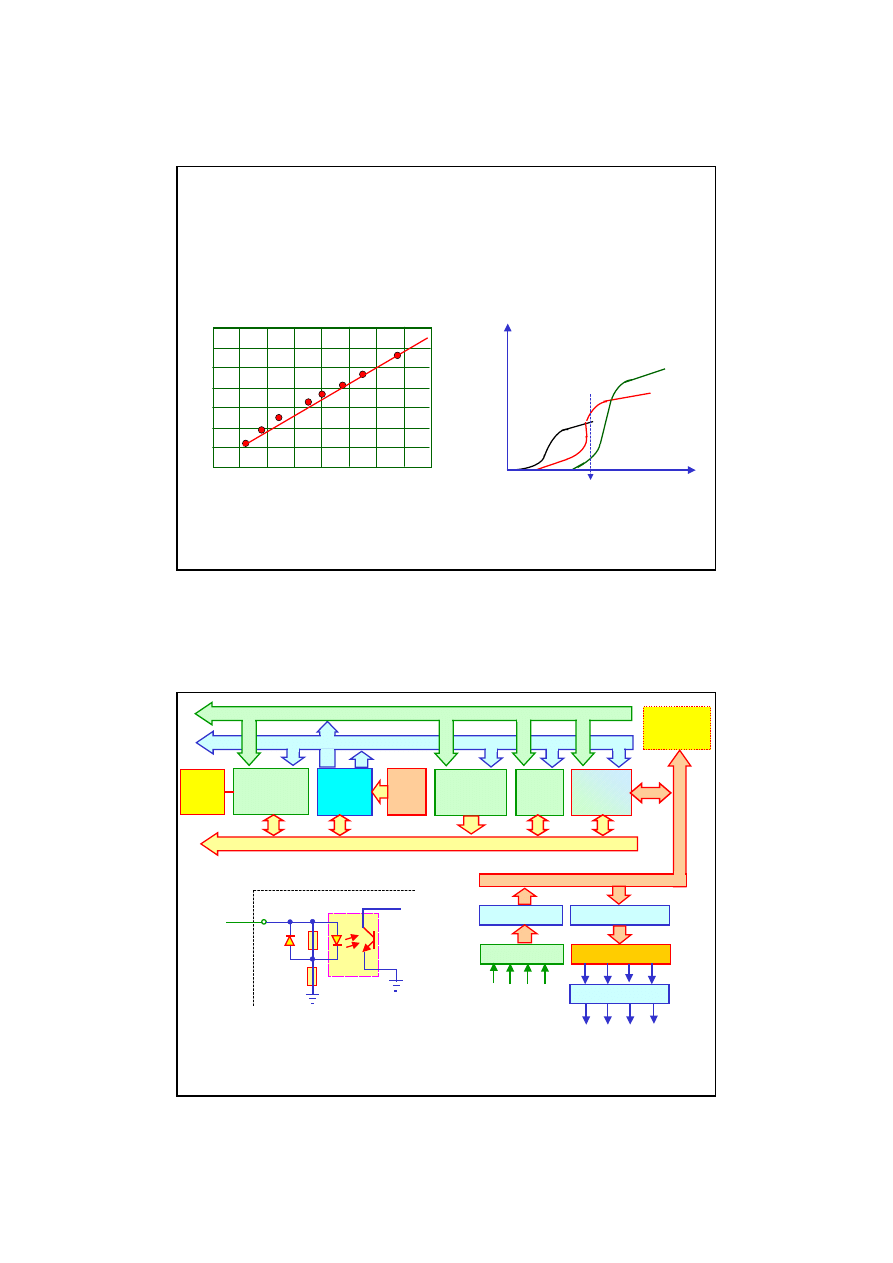
Potencjał rozwoju systemów mechatronicznych
1975
1985
2005
Rok
MIPS
0,01
0,1
1,0
25,0
500,0
4004
8080
8086
80286
80386
80486
Procesor
Pentium
Micro
2000
Moc obliczeniowa procesora (INTEL)
MIPS – milionów operacji obliczeniowych na sekund
ę
Skumulowane
nakłady
badawcze i
rozwojowe
Mo
ż
liwo
ś
ci w liczbie
zintegrowanych funkcji
samochodu
10.000
1000
100
10
Obecnie
Funkcje
oparte na
mechanice
Funkcje
oparte na
elektronice
Funkcje oparte
na oprogramo-
waniu
Potencjał innowacyjny
Potencjał innowacyjny
Potencjał integracyjny
Potencjał integracyjny
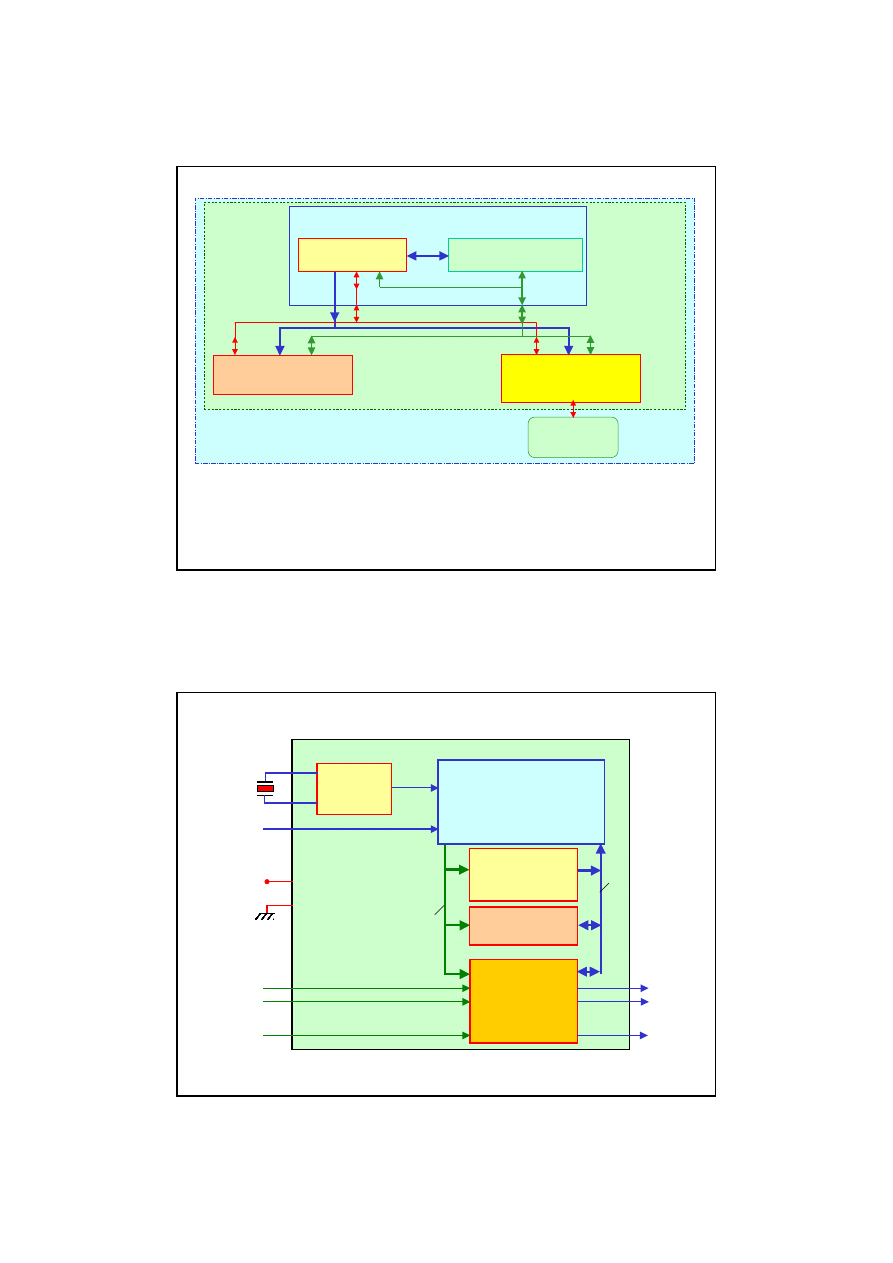
Architektura sterownika swobodnie programowalnego PLC
(ang. Programmable Logical Controller)
Bateria
RAM dla
programu
aplikacyjnego
CPU
CPU
Dajnik
Dajnik
taktu
taktu
ROM dla
danych
systemowych
RAM
dla
danych
Moduł
wej
ś
ciowy/
wyj
ś
ciowy
Programator
Bufor
Pami
ęć
po
ś
rednia
Optoizolacja
Interfejs driver’a
Driver
Kanały wyj
ś
ciowe
Kanały wej
ś
ciowe
Magistrala systemowa I/O
Magistrala danych
Magistrala sterowania
Magistrala adresowa
Optoizolator
Dzielnik
napi
ę
cia
Dioda
ochronna
Wej
ś
cie
Sygnał do CPU
PLC
Kanał wej
ś
ciowy z separacj
ą
galwaniczn
ą
sygnału
11
Cechy charakterystyczne PLC
Sterownik PLC jest specjalnym systemem komputerowym do realizacji zada
ń
automatyzacji, które s
ą
rozwi
ą
zywane przewa
ż
nie przez binarne układy
sterowania logicznego i sekwencyjnego.
Typowymi cechami charakterystycznymi PLC s
ą
:
• obszar zastosowa
ń
: automatyzacja z (PSR), tzn. pomiarami (P), sterowaniem
(S) i regulacj
ą
(R)
• odporna budowa urz
ą
dzenia dla pracy w surowych warunkach produkcyjnych,
• odporno
ść
na działanie
ś
rodowiska, du
ż
a odporno
ść
na zakłócenia i
niezawodno
ść
,
• okre
ś
lone przebiegi w przypadku zakłóce
ń
i ponownym uruchomieniu,
• brak pami
ę
ci masowych takich jak twardy dysk czy CD-ROM,
• binarne, analogowe i cyfrowe wej
ś
cia i wyj
ś
cia (najcz
ęś
ciej odkłócone, z
separacj
ą
galwaniczn
ą
i odporne na zwarcie),
• komunikacja z innymi (sterownikami) przez systemy magistralowe (sieciowe),
• brak lub proste i odporne urz
ą
dzenia obsługi (HMI),
• programowanie za pomoc
ą
oddzielnego programatora lub PC,
• zorientowane na aplikacje j
ę
zyki programowania (IL, LD, FBD, ST, SFC),
• cykliczne wykonywanie programu.
Rodzaje budowy sterowników PLC
Konwencjonalny PLC
Zintegrowany ze sterowaniem
Slot-PLC w PC
Soft-PLC z PC
Zalety:
Zalety:
• du
ż
a odporno
ść
,
• wysoka niezawodno
ść
.
Wady:
Wady:
• funkcje obsługowe na zewn
ę
trz,
• komunikacja wymaga du
ż
ych nakładów.
Bazowe układy sterowania:
Bazowe układy sterowania:
• układy sterowania
numerycznego CNC (ang.
Computerized Numerical
Control),
• układy sterowania
robotów RC (ang. Robot
Control).
Wady:
Wady:
• elastyczno
ść
zmniejsza niezawodno
ść
,
• I/O przył
ą
czane tylko przez sie
ć
.
Wady:
Wady:
• I/O przył
ą
czane tylko przez sie
ć
.
• koszty karty PLC.
Zalety:
Zalety:
• elastyczno
ść
PC,
• dobrze realizowalne funkcje
obsługowe,
• ró
ż
norodna komunikacja
.
Zalety:
Zalety:
• odporno
ść
i niezawodno
ść
dzi
ę
ki
specjalnym kartom PLC,
• cz
ęść
stanowi
ą
ca PC dla funkcji
obsługowych i komunikacyjnych
.
12
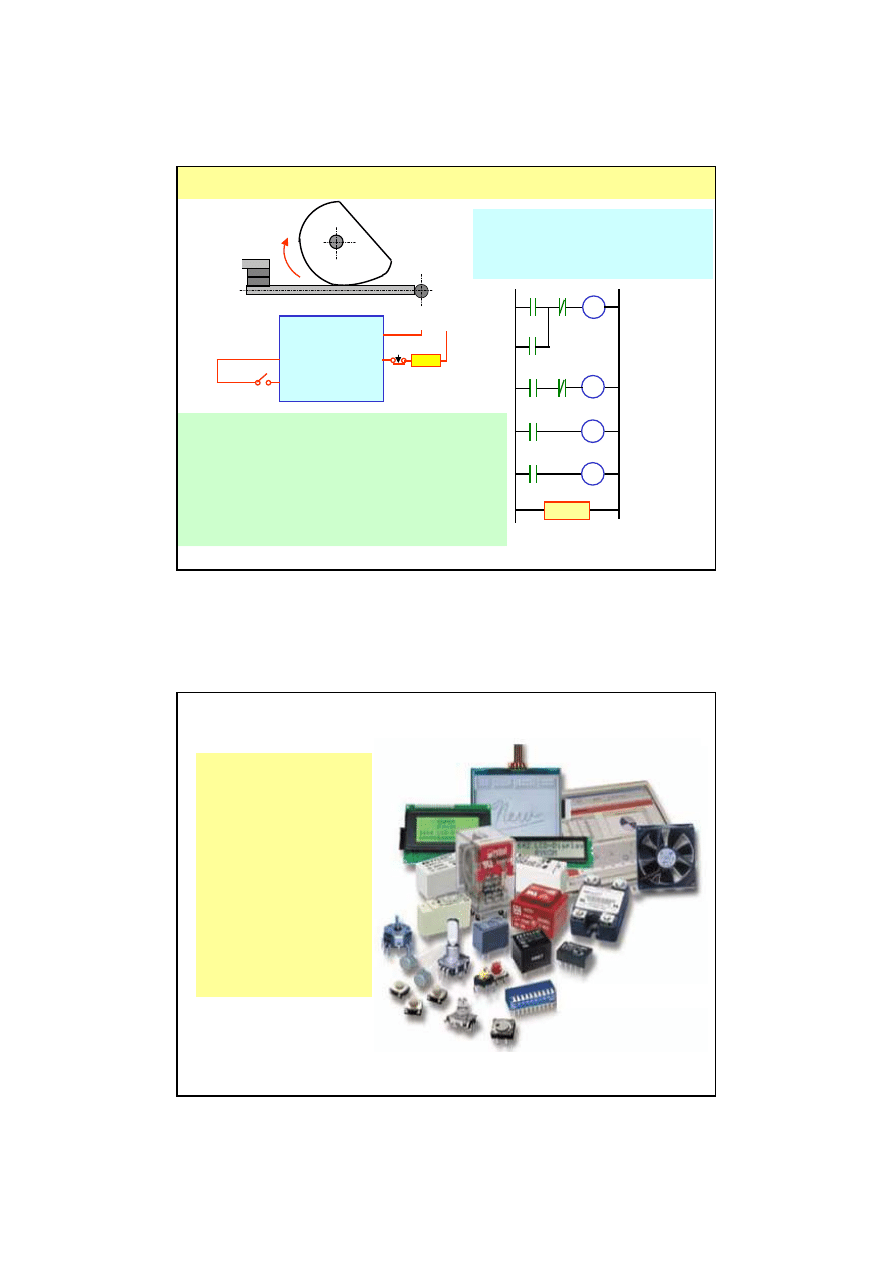
Przykład zastosowania sterownika PLC
Rozpatrzmy proste wymaganie dotycz
ą
ce urz
ą
dzenia, które zał
ą
cza człon wykonawczy np. silnik elektryczny na
okre
ś
lony czas.
Rozwi
ą
zaniem konwencjonalnym
(mechanicznym) tego problemu mo
ż
e by
ć
krzywka, która obraca si
ę
ze stał
ą
pr
ę
dko
ś
ci
ą
i
powoduje uruchomienie ł
ą
cznika. Czas trwania
zał
ą
czenia jest zale
ż
ny od kształtu tej krzywki.
Natomiast rozwi
ą
zaniem mechatronicznym tego problemu mo
ż
e
by
ć
zastosowanie sterownika swobodnie programowalnego PLC
(ang. Programmable Logical Controller) z odpowiednim programem
aplikacyjnym. Takie rozwi
ą
zanie, w porównaniu z obracaj
ą
c
ą
si
ę
krzywk
ą
, ma t
ą
zalet
ę
,
ż
e czasy zał
ą
czania i wył
ą
czania mo
ż
na w
prosty sposób zmienia
ć
za pomoc
ą
warto
ś
ci parametrów zegara
(Timer’a) w programie aplikacyjnym. Natomiast w układzie
mechanicznym taka zmiana powoduje konieczno
ść
zastosowania
innej krzywki. Rozwi
ą
zanie programowe jest znacznie prostsze w
realizacji ani
ż
eli rozwi
ą
zanie sprz
ę
towe.
Merker
Wej
ś
cie Start
uruchamia (zał
ą
cza)
Merker, wej
ś
cie jest
pami
ę
tane i
uruchamiany jest
Timer 1.
Koniec
Timer 1
Timer 2
Timer 1
Timer 1
Merker
Start
Timer 2
Wyj
ś
cie
Stop
Program aplikacyjny PLC
Timer 1 ustawia
wymagany czas dla
zał
ą
czenia Wyj
ś
cia.
Styk Timer 1 jest
zamykany, aby
wł
ą
czy
ć
Wyj
ś
cie
Timer 2 jest
uruchamiany, je
ż
eli
zamkni
ę
te s
ą
styki
Timer 1 i okre
ś
la on
czas, po którym
nast
ę
puje
wył
ą
czenie wyj
ś
cia
Merker
Krzywka
Styki
Napi
ę
cie
zasilania
Zasilanie w energi
ę
Wyj
ś
cie
Wej
ś
cie
+ 24 V
Wł
ą
cznik
PLC
PLC
Stop
Zasilacze
Kondensatory
Transformatory
Oporniki
Wentylatory
Wy
ś
wietlacze
Klawiatury
Baterie
Cewki
...
Urz
ą
dzenia peryferyjne i zespoły
13
Systemy operacyjne
Rozró
ż
nia si
ę
dwa podstawowe rodzaje systemów operacyjnych:
Standardowe systemy operacyjne
Standardowe systemy operacyjne:
- w tle wykonywane s
ą
dodatkowe programy (wygaszacz ekranu, skaner wirusów, ...),
- przerwania usług z urz
ą
dze
ń
peryferyjnych (mysz, klawiatura, ...),
⇒
⇒
⇒
⇒
⇒
⇒
⇒
⇒
nie mo
nie mo
ż
ż
na zapewni
na zapewni
ć
ć
determinizmu pracy.
determinizmu pracy.
Systemy operacyjne czasu rzeczywistego RTOS
Systemy operacyjne czasu rzeczywistego RTOS (ang Real Time Operating System):
- system Scheduling’u zapewnia wykonywanie zada
ń
o wysokim priorytecie,
- maj
ą
bezpo
ś
redni
ą
kontrol
ę
priorytetów,
- zadania o wy
ż
szym priorytecie wypieraj
ą
task’i (procesy) o niskim priorytecie,
- urz
ą
dzenia peryferyjne nie mog
ą
przerwa
ć
algorytmów sterowania (regulacji),
⇒
⇒
⇒
⇒
⇒
⇒
⇒
⇒
zapewniony jest determinizm pracy.
zapewniony jest determinizm pracy.
Pod kontrol
ą
standardowych systemów operacyjnych (np. Windows) pracuj
ą
komputery
biurowe, a tak
ż
e np. graficzne panele operatorskie HMI (interfejsy człowiek-maszyna).
Natomiast pod kontrol
ą
systemów operacyjnych czasu rzeczywistego (np. Vx Works, OS-9)
pracuj
ą
komputerowe sterowniki przemysłowe (np. PLC), a tak
ż
e komputery przemysłowe,
systemy wbudowane.
Poj
ę
cie „czas rzeczywisty” lub konkretne dane przebiegów czasu rzeczywistego daj
ą
si
ę
zdefiniowa
ć
tylko w powi
ą
zaniu z okre
ś
lon
ą
aplikacj
ą
. Je
ż
eli jej czasowe wymagania mog
ą
by
ć
ś
ci
ś
le spełnione,
to wtedy system – w odniesieniu do tej aplikacji – jest czasu rzeczywistego. Równie
ż
wa
ż
ne jest to,
ż
e ma on wyra
ź
nie przewidywalne, zapewnione dla wszystkich warunków pracy przebiegi czasowe.
Dla przebiegów czasowych systemu istotne s
ą
cztery mierzalne kryteria. Oprócz czasu
przebiegu, cyklu lub reakcji nale
żą
do nich Jitter, synchroniczno
ść
oraz przepustowo
ść
danych.
W zale
ż
no
ś
ci od aplikacji istotn
ą
wielko
ś
ci
ą
mo
ż
e by
ć
maksymalny czas transmisji informacji (czas
przebiegu), zadana siatka czasowa (czas cyklu), lub czas pomi
ę
dzy zdarzeniem (sygnałem) i
wynikaj
ą
c
ą
z niego reakcj
ą
(czas reakcji). We wszystkich tych przypadkach wychodzi si
ę
z tego,
ż
e
mo
ż
na poda
ć
pewn
ą
okre
ś
lon
ą
górn
ą
granic
ę
czasu, której w
ż
adnym przypadku nie mo
ż
na
przekroczy
ć
przy realizacji wszystkich działa
ń
.
Cz
ę
sto wychodzi si
ę
równie
ż
z tego,
ż
e działanie nie powinno przekroczy
ć
zadanego maksymalnego
czasu, co nie stanowi problemu, gdy działanie (akcja) wymaga niewiele czasu. Istniej
ą
jednak
równie
ż
takie aplikacje, w których reakcja musi nast
ą
pi
ć
wewn
ą
trz dokładnie zdefiniowanego okresu
czasu, z mo
ż
liwie małymi wahaniami pomi
ę
dzy poszczególnymi zdarzeniami. W takim przypadku
istnieje wymaganie minimalnego Jitter’a, a zatem mo
ż
liwie małego odchylenia od warto
ś
ci zadanej.
Je
ż
eli ró
ż
ne działania ró
ż
norodnych urz
ą
dze
ń
powinny by
ć
wykonane w jednakowym czasie, to
wyst
ę
puje wymaganie dotycz
ą
ce synchroniczno
ś
ci. Daje si
ę
to uzyska
ć
albo za pomoc
ą
rozproszonych i synchronicznie pracuj
ą
cych zegarów, albo za pomoc
ą
centralnie zadawanego taktu
synchronizacji, do którego s
ą
odnoszone wszystkie działania. Wielko
ś
ci
ą
mierzon
ą
jest tutaj
dokładno
ść
synchronizacji.
Ponadto pewn
ą
rol
ę
ogrywa równie
ż
ilo
ść
danych, któr
ą
nale
ż
y wymieni
ć
w zadanym czasie.
Stanowi to specyficzne wymaganie przepustowo
ś
ci danych systemu komunikacyjnego.
Systemy czasu rzeczywistego
14
Tryb czasu rzeczywistego jest takim działaniem systemu obliczeniowego, w którym programy s
ą
stale gotowe
do wykonywania, dzi
ę
ki czemu wyniki s
ą
uzyskiwane w okre
ś
lonym czasie. Dane mog
ą
by
ć
dostarczane w
sposób stochastyczny lub deterministyczny.
Działanie w czasie rzeczywistym (ang. Real Time)
Przetwarzanie
danych
Dane wej
ś
ciowe
Dane wyj
ś
ciowe
Przetwarzanie danych
nie w czasie rzeczywistym
nie w czasie rzeczywistym:
Przetwarzanie danych
w czasie rzeczywistym
w czasie rzeczywistym:
Przetwarzanie
danych
Dane wej
ś
ciowe
Dane wyj
ś
ciowe
Czas
Czas
Czas
System czasu rzeczywistego
jest takim systemem, w
którym jest istotny czas
uzyskiwania danych
wyj
ś
ciowych.
Definicja czasu
rzeczywistego: “Zdolno
ść
systemu operacyjnego do
udost
ę
pniania usług w
deterministycznie
ograniczonym czasie
odpowiedzi”.
Czas rzeczywisty nie
oznacza szybko
ś
ci, lecz
okre
ś
la dopasowan
ą
czasowo interakcj
ę
, tzn.
odpowied
ź
na zewn
ę
trzne
lub wewn
ę
trzne zdarzenie
procesu (np. sygnał).
1
µµµµ
s 10
µµµµ
s 100
µµµµ
s 1 ms 10 ms 100 ms 1 s 10 s
Czas reakcji
Czas reakcji
Klasy
Klasy
Real
Real
Time
Time
Budynki, poziom
kierowania i automatyzacji,
systemy magazynowe
Instalacje transportowe,
regulacja, wi
ę
kszo
ść
instalacji automatyzacji
Obrabiarki, szybkie
procesy, roboty
Wysokodynamiczne
synchronizowane
procesy, „przekładnie
elektroniczne”
Klasa 2
Klasa 3
Klasa 4
Klasa 1
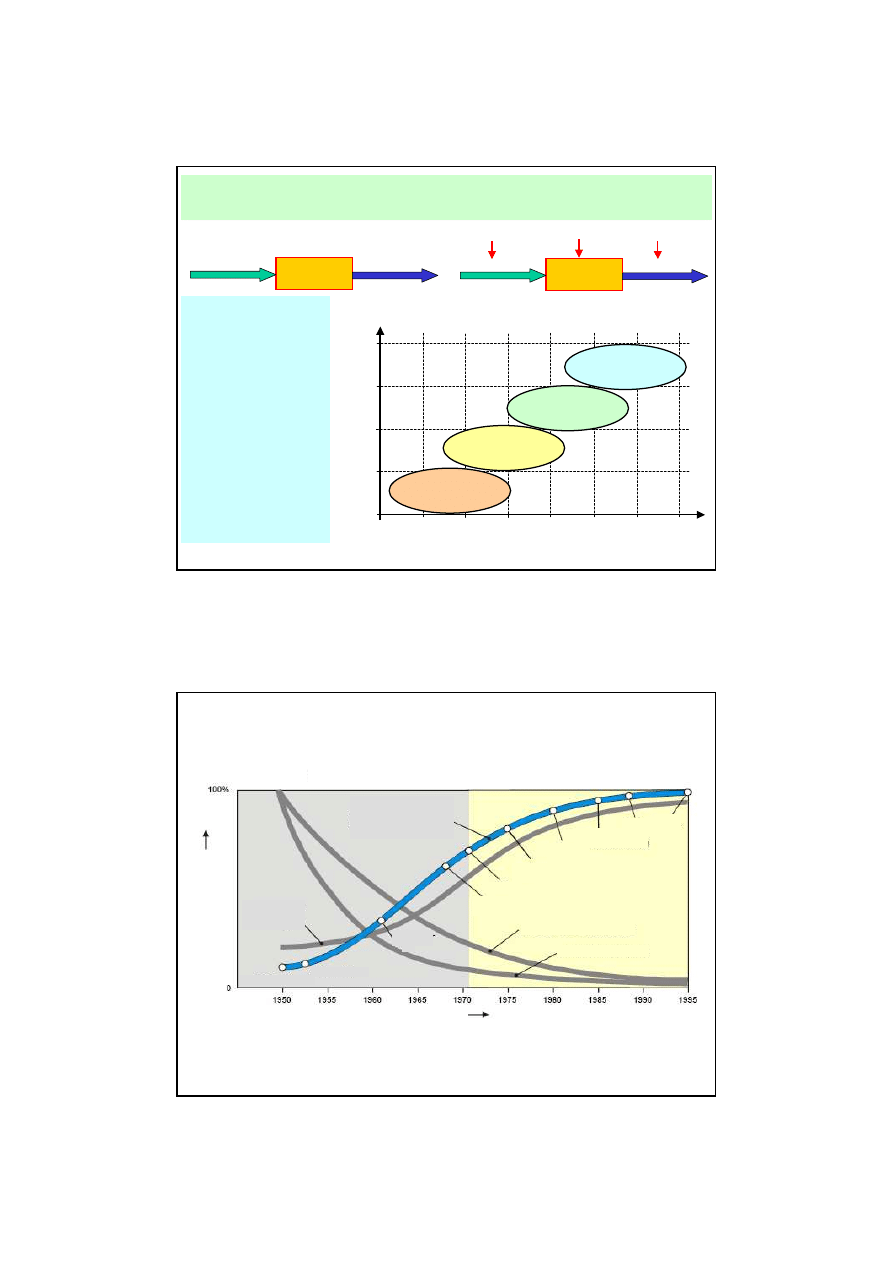
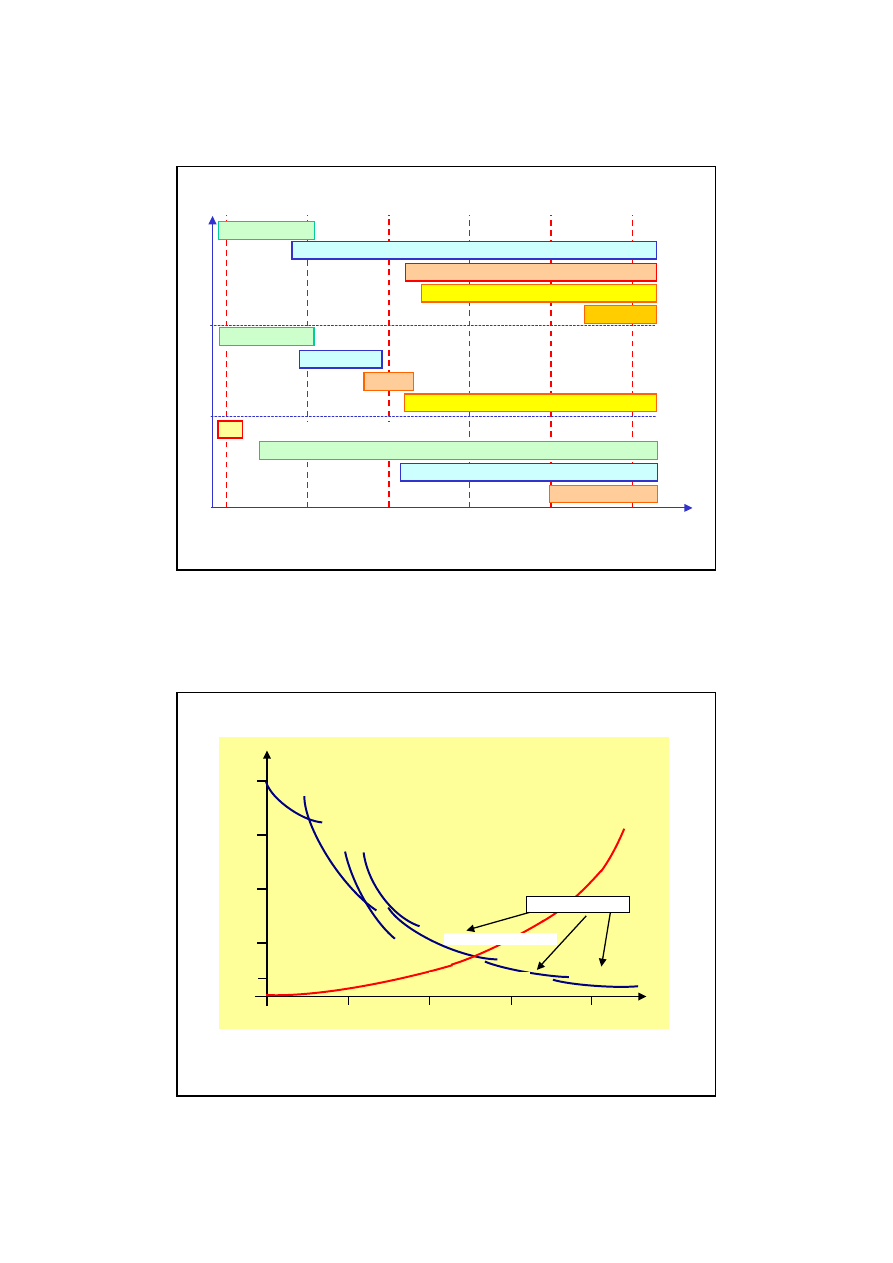
Rozwój układów sterowania numerycznego NC/CNC
Sprz
ę
t (układy
sterowania NC)
Oprogramowanie (układy
sterowania CNC)
Czas
K
o
s
z
ty
,
w
ie
lk
o
ś
ć
,
z
a
k
re
s
f
u
n
k
c
y
jn
y
Ź
ródło: Salib
Relacja kosztów
Relacja kosztów
oprogramowanie /
oprogramowanie /
sprz
ę
t
sprz
ę
t
Zakres
Zakres
funkcyjny
funkcyjny
Przeka
ź
nikowe NC
Lampowe NC
Tranzyst.
NC w technice układów
scalonych IC
NC
CNC
Mikroprocesorowe
CNC
CNC
CNC
ESW
CAM
WOP
Obsługa graficzna
CIM
PC
ONC
Koszty elementów
Koszty elementów
Wielko
ść
sprz
ę
tu
Wielko
ść
sprz
ę
tu
NC (ang. Numerical Control)
CNC (ang. Computerized Numerical Control)
15
Rozwój techniki NC/CNC
1950
1960
1970
1980
1990
2000
Lampy elektronowe
Techn. tranzyst.
Techn. IC
Mini- i mikroprocesory (CNC)
Frezarki NC do zastosowania w przemy
ś
le
Obrabiarki NC dla innych technik wytwarzania
Równol. ukł. kinemat.
Opracowanie pierwszej frezarki NC
(CNC)
(CNC)
Binarne ta
ś
my perfor.
Symboliczny j
ę
zyk programowania APT, tworzenie pliku CLDATA
Format PN-ISO 6983 (DIN 66025), tzw. G-kody
Graficzne wspomaganie programowania
NURBS
O
b
ra
b
ia
rk
i
U
k
ła
d
y
s
te
ro
w
a
n
ia
P
ro
g
ra
m
o
w
a
n
ie
Rok
Rozwój układów sterowania numerycznego NC/CNC
1960
1970
1980
1990
2000
Rok
10
20
50
75
100
Cena
%
Przeka
ź
niki i lampy
Tranzystory
Minikomputery (CNC1)
Mikroprocesory (CNC2)
Jednoprocesorowe
CNC (CNC3)
VLSI, Technika SMD
PC-NC (CNC4)
IC
Zakres funkcyjny i mo
ż
liwo
ś
ci
(moc obliczeniowa) NC
IC (ang. Integrated Circuits)
VLSI (ang. Very Large-Scale Integration)
SMD (ang. Surface Mounted Devices)
PC-NC – układ CNC zintegrowany z PC
16
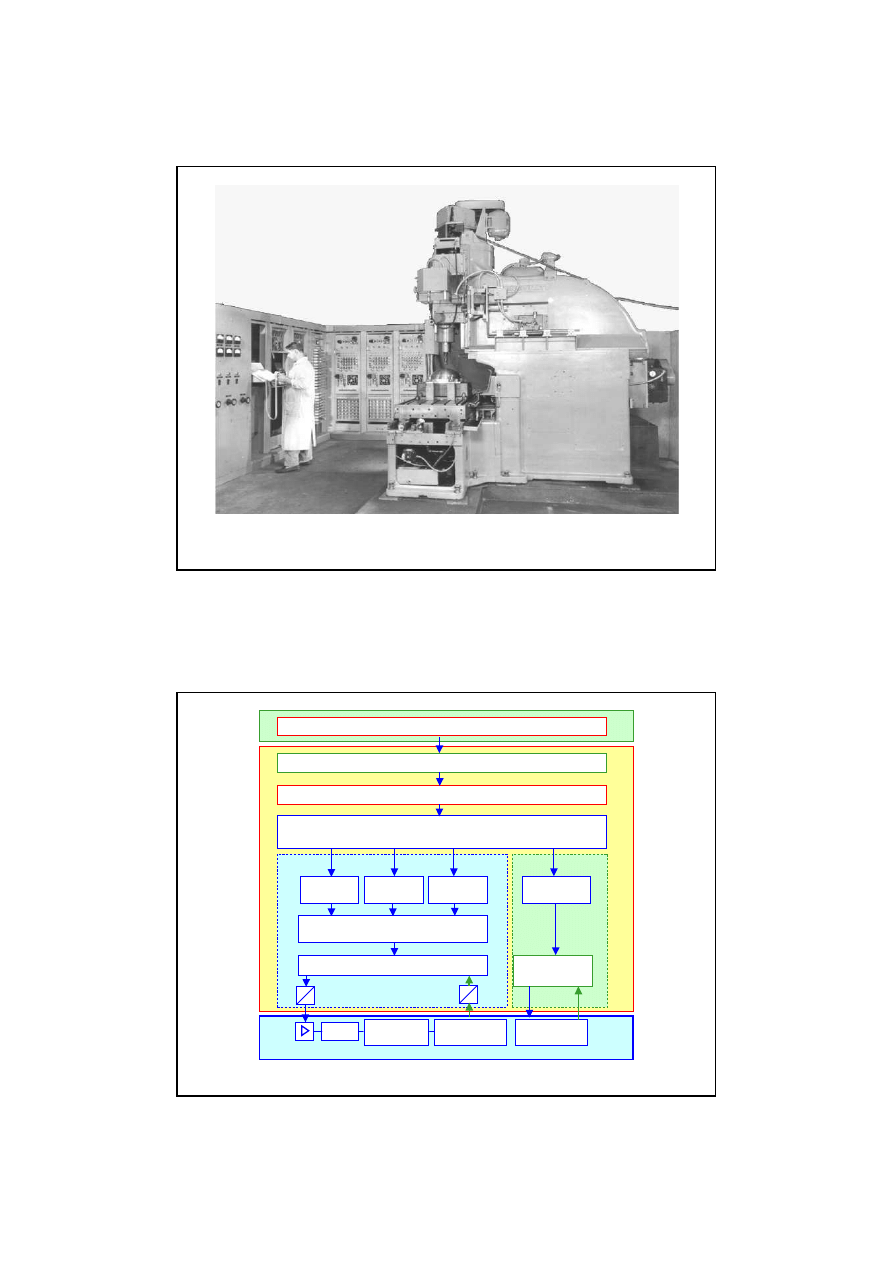
Pierwsza obrabiarka sterowana numerycznie
– MIT/ Boston (USA) 1953 r.
Regulacja poło
ż
enia
Regulacja poło
ż
enia
C
C
C
A
Tworzenie warto
ś
ci zadanej
Tworzenie warto
ś
ci zadanej
poło
ż
enia
poło
ż
enia
Informacje
o drodze
Informacje
o posuwie
Warunki
drogi
Rozdział danych NC
Rozdział danych NC
Dane geometryczne
Dane technologiczne
Pami
ęć
programu NC
Pami
ęć
programu NC
Sterowanie wczytywaniem programu i danych NC
Sterowanie wczytywaniem programu i danych NC
Program NC
Program NC
Maszyna wytwórcza
Maszyna wytwórcza
Nap
ę
d
Układ
mechaniczny
Układ pomiaru
poło
ż
enia
Sygnały
logiczne
Sterowanie
Sterowanie
dopasowuj
ą
ce
dopasowuj
ą
ce
Informacje o
zał
ą
czaniu
D
D
A
A
N
N
E
E
G
G
E
E
O
O
M
M
E
E
T
T
R
R
Y
Y
C
C
Z
Z
N
N
E
E
D
D
A
A
N
N
E
E
T
T
E
E
C
C
H
H
N
N
O
O
L
L
O
O
G
G
I
I
C
C
Z
Z
N
N
E
E
S
S
T
T
E
E
R
R
O
O
W
W
N
N
I
I
K
K
N
N
C
C
Zespoły funkcyjne sterownika NC
17
Interpreter NC
Przetwarzanie
danych
geometrycznych
Interpolator
Regulacja
poło
ż
enia
Regulacja
nap
ę
dów
Programy NC
(kod ASCII)
Sygnały
PLC
Szybkie I/O
Warto
ś
ci zadane/
rzeczywiste
nap
ę
dów
Warto
ś
ci zadane/
rzeczywiste
Wewn
ę
trzny
blok danych
Zamienia bloki w kodach ASCII na wewn
ę
trzny format
Steruje przebiegiem programu
Synchronizuje/ reorganizuje bufor bloków
Transformacja FRAME
Korekcja narz
ę
dzi
Przygotowuje przebieg pr
ę
dko
ś
ci (LOCK AHEAD)
Interpolacja toru
Transformacja kinematyczna
Działania synchronizacyjne
Regulacja poło
ż
enia
Regulacja pr
ę
dko
ś
ci
Regulacja pr
ą
du
Przepływ informacji w układzie NC
Przykład nowej rodziny
Solution
Solution
Line
Line układów CNC
SINUMERIK firmy Siemens
S840D sl
S840Di sl
S802D sl
Zabudowa modułowa
Uniwersalno
ść
zabudowy
SINAMICS
Do 31 osi/ wrzecion/10
kanałów
Zintegrowany PC-CNC
Synchroniczny PROFIBUS
dla SINAMICS i SIMATIC
Do 20 osi/ wrzecion/10
kanałów
Opcjonalnie analogowe
zł
ą
cze dla nap
ę
dów
Kompaktowy panel CNC
Do 4 osi/
1 wrzeciono/ 1 kanał lub
3 osie/
2 wrzeciona/ 1 kanał
Frezarka, tokarka
18
Struktura funkcjonalna robota
Planowanie
Planowanie
toru
toru
Człon
Człon
nastawiaj
ą
cy
nastawiaj
ą
cy
Nap
ę
d
Nap
ę
d
Sterowanie
Sterowanie
robota
robota
Układy
Układy
pomiarowe
pomiarowe
Człon
Człon
nastawiaj
ą
cy
nastawiaj
ą
cy
Przetwarzanie
Przetwarzanie
ruchu
ruchu
Narz
ę
dzie
Narz
ę
dzie
Obiekt
Obiekt
Programator
Programator
Informacja
Energia
Materiał
Otoczenie
Otoczenie
Sensory
Układy
pomiaru
poło
ż
enia
Wej
ś
cia
cyfrowe
Układ
kinematyczny
(przeguby i człony)
Chwytaki/
narz
ę
dzia
Nap
ę
dy/
elementy
wykonawcze
Wyj
ś
cia
cyfrowe
Układ sterowania RC robota
Układ sterowania RC robota
Program aplikacyjny
Interpreter
Warto
ś
ci zadane/
Transformacje
współrz
ę
dnych
Regulacja
poło
ż
enia
PLC
PLC
Składniki robotów przemysłowych
19
Zadania układu sterowania RC:
Zadania układu sterowania RC:
sterowanie realizacj
ą
przemieszcze
ń
robota,
oddziaływanie na składniki procesu w systemie,
oddziaływanie na składniki transportu i dostarczania,
sterowanie funkcji chwytaka,
przyjmowanie i ocena sygnałów z sensorów,
przyjmowanie i ocena informacji procesowych dla oddziaływania na
proces,
funkcje diagnostyczne do rozpoznawania bł
ę
dów robota i procesu,
wspomaganie obsługuj
ą
cego,
wspomaganie programisty przy przygotowywaniu zada
ń
automatyzacji.
Zadania układu sterowania RC robota
Aby wykona
ć
wszystkie te zadania układ sterowania robota RC, oprócz jednostki o
du
ż
ej mocy obliczeniowej, wymaga urz
ą
dze
ń
peryferyjnych do procesu i do
obsługi.
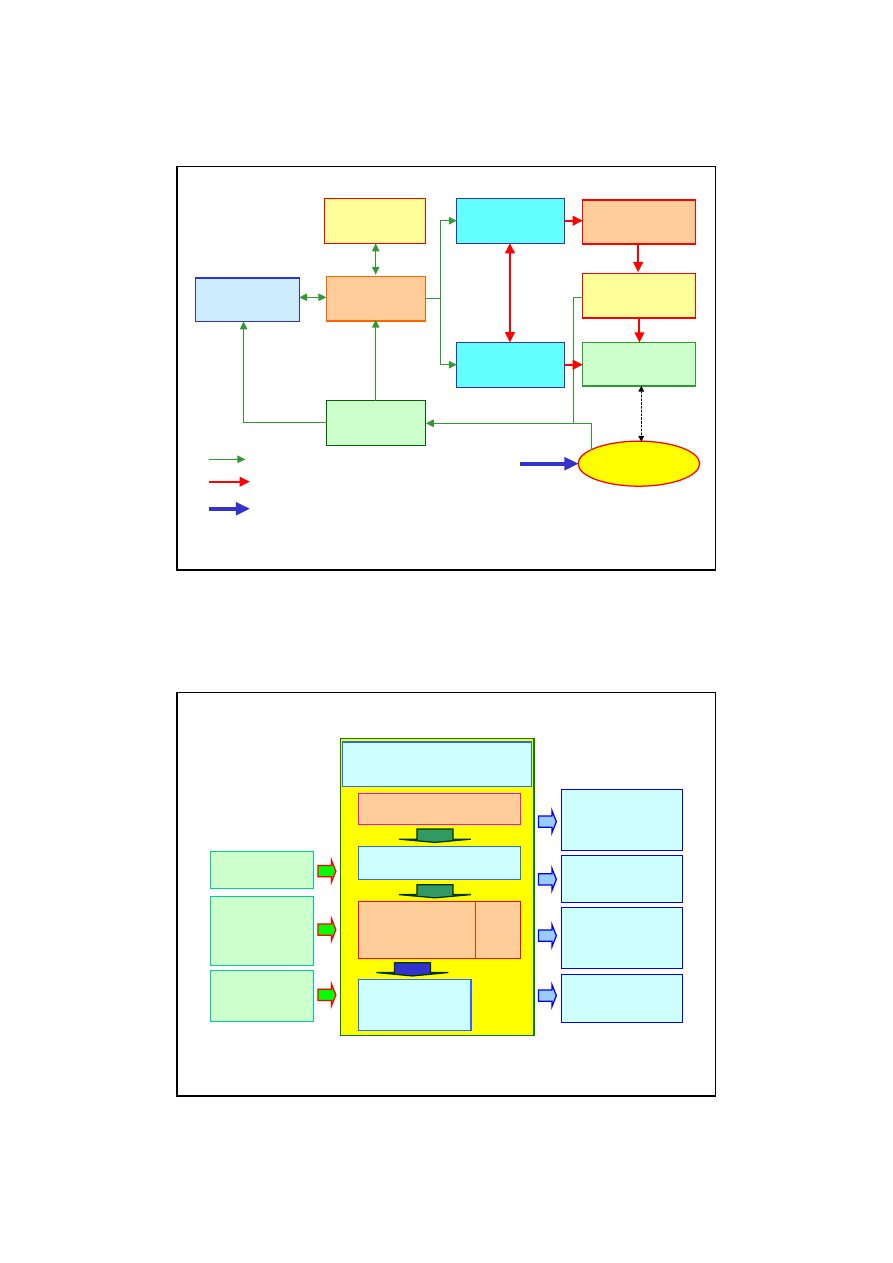
Składniki układu sterowania RC robota przemysłowego
Moduł komunikacyjny
Programy aplikacyjne,
instrukcje sterowania,
dane
Sterowanie sekwencyjne, interpreter
Sterowanie
ruchami/
Interpolator
Regulator
osi
Pr
z
e
tw
a
rz
a
n
ie
d
a
n
y
c
h
z
s
e
n
s
o
ró
w
St
e
ro
w
a
n
ie
d
z
ia
ła
n
ia
m
i
O
b
s
łu
g
a
i
p
ro
g
ra
m
o
w
a
n
ie
N
a
p
ę
d
y
U
k
ła
d
k
in
e
m
a
ty
c
z
n
y
U
k
ła
d
p
o
m
ia
ru
p
o
ło
ż
e
n
ia
S
e
n
s
o
ry
E
fe
k
to
ry
te
c
h
n
o
lo
g
ic
z
n
e
El
e
m
e
n
ty
n
a
s
ta
w
ia
j
ą
c
e
20
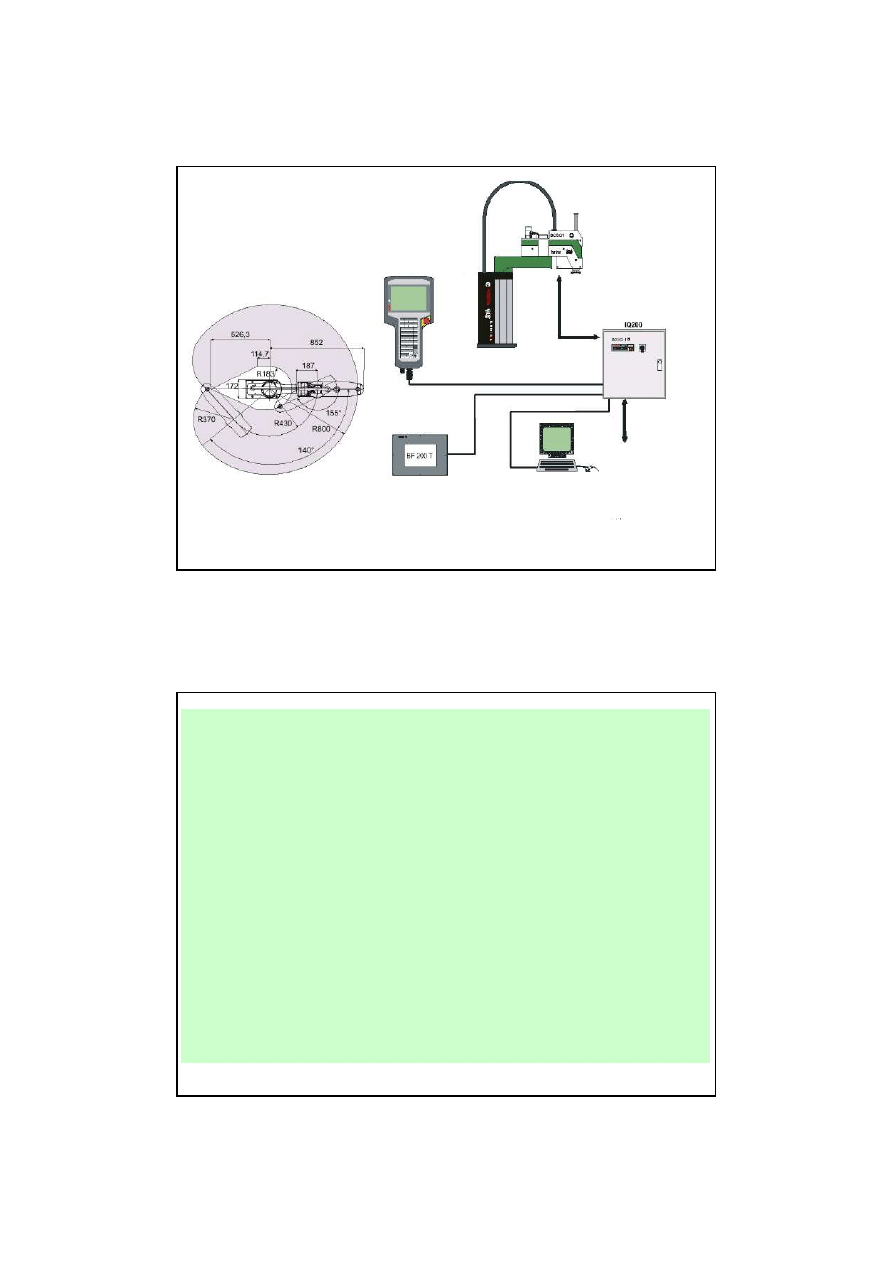
Przykład robota monta
ż
owego SR6/8 (SCARA) firmy Bosch
Obszar roboczy
Obszar roboczy
robota
robota
Robot
Robot
- turboscara SR6, SR8
Urz
ą
dzenia peryferyjne:
Urz
ą
dzenia peryferyjne:
- 8 cyfrowych I,
- 4 cyfrowe O,
- 4 analogowe O.
Sie
ć
Sie
ć
Fieldbus
Fieldbus
CAN
CAN
- warto
ś
ci zadane,
- warto
ś
ci rzeczywiste,
- rozproszone I/O.
Sie
ć
Sie
ć
Fieldbus
Fieldbus
CAN
CAN
- rozproszone I/O.
Urz
ą
dzenia peryferyjne:
Urz
ą
dzenia peryferyjne:
- sensory,
- elementy wykonawcze,
- moduły I/O.
Obsługa
Diagnostyka
Touchscreen
Programowanie off-line
Programowanie on-line
Obsługa
Diagnostyka
Ustawianie parametrów robota
PHG2000
PHG2000
Programowanie on-line
Obsługa
Diagnostyka
Ustawianie parametrów
robota
Systemy wbudowane
Cz
ę
sto w systemach mechatronicznych „wbudowane” s
ą
mikroprocesory i mikrokontrolery, za
pomoc
ą
których realizowane s
ą
zadania sterowania lub regulacji. Przykładem takiego
rozwi
ą
zania jest nowoczesna pralka automatyczna, która zawiera wbudowany mikrokontroler
słu
żą
cy do wybierania ró
ż
nych programów prania. Obsługuj
ą
cy pralk
ę
musi jedynie przy pomocy
przeł
ą
czników wybra
ć
żą
dany program oraz dobra
ć
parametry, a nast
ę
pnie uruchomi
ć
jego
wykonanie. Nie musi on jednak programowa
ć
samego mikrokontrolera. Poj
ę
cie system
wbudowany
ES
ES (ang. Embedded System) jest u
ż
ywane dla obiektów ze wspomaganiem
mikroprocesorowym, w których do sterowania wzgl. regulacji stosowana jest funkcja lub szereg
funkcji, ale bez ich programowania przez samego u
ż
ytkownika. Programowanie układu
mikroprocesorowego zostało wykonane przez producenta maszyny (urz
ą
dzenia), a poszczególne
programy zostały zapisane w pami
ę
ci systemu i nie mog
ą
ju
ż
by
ć
przez u
ż
ytkownika zmieniane.
Zmieniane mog
ą
by
ć
jedynie warto
ś
ci parametrów wyst
ę
puj
ą
cych w tych programach.
Dla systemu wbudowanego producent wykonuje pami
ęć
ROM, która zawiera program. Jest to
opłacalne tylko wtedy, gdy wymagana jest du
ż
a liczba takich chip’ów. Do wykonywania
prototypów lub aplikacji o małych wymaganiach program mo
ż
e by
ć
ładowany do sprz
ę
tu
u
ż
ytkownika, tzn. pami
ę
ci EPROM/EEPROM.
Systemy wbudowane znajduj
ą
si
ę
w prawie wszystkich nowoczesnych obiektach technicznych,
takich jak: samochody (np. asystent hamowania lub sterowanie dynamiki toru jazdy), samoloty,
systemy kierowania ruchem (sygnalizacja
ś
wietlna), urz
ą
dzenia medyczne, urz
ą
dzenia
telekomunikacyjne, instalacje sterowania produkcj
ą
i wiele artykułów konsumpcyjnych. Przejmuj
ą
w nich one zło
ż
one zadania sterowania, regulacji i przetwarzania danych oraz dzi
ę
ki dodatkowym
własno
ś
ciom zapewniaj
ą
takim wyrobom przewag
ę
konkurencyjn
ą
na rynku. Dlatego te
ż
systemy
wbudowane nale
żą
do najszybciej rozwijaj
ą
cego si
ę
obszaru w informatyce stosowanej.
21
Reaktywny system wbudowany
Ci
ą
gła interakcja z procesem:
Wskazania, alarmy
optycznie, akustycznie itp.
Urz
ą
dzenia obsługi
przyciski, klawiatura, itp.
Człowiek
kierowanie, nadzorowanie
Proces
techniczny
Aktuatory
styczniki, silniki itp.
Sensory
droga, pr
ę
dko
ść
itp.
Sterowanie
Ingerencja,
parametryzacja
Dane o procesie
Wizualizacja
Oddziaływanie
na proces za
pomoc
ą
aktuatorów
Procesy fizyczne:
– brak inteligencji (nie kognitywne),
– najcz
ęś
ciej sztywne interfejsy.
Wiele asynchronicznych zdarze
ń
(sygnałów).
Twarde warunki czasu rzeczywistego:
– cz
ę
sto wymagane izochroniczne przetwarzanie (regulator).
Bezpiecze
ń
stwo.
Warunki otoczenia.
Struktura systemu wbudowanego (ES)
W zale
ż
no
ś
ci od rodzaju zastosowania i zwi
ą
zanych z nim aspektów kosztów struktura fizyczna systemów
wbudowanych znacznie si
ę
zmienia. Rozci
ą
ga si
ę
ona od jednoukładowych komputerów (cena ok. 1 EURO)
stosowanych w tanich artykułach konsumpcyjnych, takich jak np. zegary czy odtwarzacze, a
ż
do komputerów
przemysłowych stosowanych w liniach produkcyjnych. Pomimo du
ż
ych ró
ż
nic w strukturze fizycznej wszystkie
systemy wbudowane maj
ą
tak
ą
sam
ą
budow
ę
logiczn
ą
. Zamiast tradycyjnego interfejsu człowiek-maszyna HMI, jaki
jest stosowany w przypadku komputerów do ogólnego przetwarzania danych, w systemach wbudowanych wyst
ę
puje
interfejs do otoczenia systemu technicznego. Oznacza to,
ż
e zamiast zwykłych urz
ą
dze
ń
wprowadzania i
wyprowadzania danych takich jak klawiatura, monitor, gło
ś
niki itp. stosowane s
ą
urz
ą
dzenia sensoryczne, za
pomoc
ą
których system wbudowany okre
ś
la własno
ś
ci otoczenia oraz aktuatoryka, za pomoc
ą
której ES realizuje
oddziaływanie na swoje otoczenie. Urz
ą
dzenia sensoryczne zawieraj
ą
zwykle czujniki, które mierz
ą
okre
ś
lone
wielko
ś
ci otoczenia, przy czym przekazywane przez nie informacje nie musz
ą
by
ć
koniecznie zró
ż
nicowanymi
danymi pomiarowymi, takimi jak np. temperatura w
o
C, lecz mog
ą
to by
ć
równie
ż
najprostsze informacje
dwustanowe, takie jak np. dostarczane przez termostat. Natomiast aktuatoryka mo
ż
e si
ę
składa
ć
z dowolnego
sterowanego przez wbudowany komputer członu nastawiaj
ą
cego (wykonawczego), takiego jak np. zawory
elektromagnetyczne lub silniki krokowe. Poniewa
ż
wła
ś
ciwie ró
ż
nica pomi
ę
dzy zwykłymi komputerami do
przetwarzania danych i systemami wbudowanymi zawiera si
ę
tylko w rodzaju interfejsu wprowadzania/
wyprowadzania, to wydaje si
ę
ona pocz
ą
tkowo mało znacz
ą
ca. Jednak ma ona daleko id
ą
ce konsekwencje, tak
ż
e
i wła
ś
nie dla rozwoju oprogramowania. Ponadto, zamiast bardzo zró
ż
nicowanych interakcji u
ż
ytkownika, jakie
wyst
ę
puj
ą
w ogólnym w przetwarzaniu danych, w systemach wbudowanych wyst
ę
puje tylko konieczno
ść
reakcji na
mało zró
ż
nicowane dane pomiarowe. Wymaga to zapewnienia systemowi wbudowanemu wystarczaj
ą
co dokładnego
wewn
ę
trznego modelu swojego otoczenia, który pozwala mu na interpretacj
ę
danych pomiarowych i wybór
odpowiedniej reakcji. Do tego dochodzi jeszcze to,
ż
e u
ż
ytkownik (człowiek) dysponuje znacznie elastyczniejszymi
mo
ż
liwo
ś
ciami reakcji ni
ż
otoczenie techniczne, dzi
ę
ki czemu mo
ż
e on np. sensownie reagowa
ć
na meldunki
bł
ę
dów, rozpoznawa
ć
zawieszenie si
ę
programu, a tak
ż
e tolerowa
ć
spó
ź
nion
ą
reakcj
ę
systemu (nawet gdy tego nie
chce). Jest to tak
ż
e zwi
ą
zane z tym,
ż
e dostarczone wraz z masowymi wyrobami systemy wbudowane s
ą
trudne do
korekcji (np. przez Internet), co powoduje szczególne wymagania dotycz
ą
ce sprz
ę
tu, a zwłaszcza oprogramowania.
Wreszcie musz
ą
by
ć
uwzgl
ę
dnione wszystkie mo
ż
liwe scenariusze wyst
ę
puj
ą
ce podczas zastosowania, tzn. ka
ż
dy
mo
ż
liwy lub przynajmniej prawdopodobny ci
ą
g interakcji pomi
ę
dzy układem technicznym i systemem wbudowanym.
Ka
ż
dy nieprzewidziany scenariusz mo
ż
e bowiem prowadzi
ć
do bł
ę
dnego zachowania si
ę
systemu wbudowanego,
co w nast
ę
pstwie mo
ż
e spowodowa
ć
fatalne skutki dla ciała,
ż
ycia lub
ś
rodowiska.
22
System wbudowany ES (ang. Embedded System):
(Prawie) wszystkie systemy czasu rzeczywistego RT (ang. Real Time) s
ą
systemami
wbudowanymi, ale nie ka
ż
dy system wbudowany jest systemem RT.
Systemy wbudowane maj
ą
m.in. nast
ę
puj
ą
ce własno
ś
ci:
system techniczny
system techniczny
,
, w którym wbudowany jest sterowany programowo układ
obliczeniowy,
układ obliczeniowy najcz
ęś
ciej
steruje
steruje,
reguluje
reguluje lub
nadzoruje
nadzoruje proces
techniczny,
układ obliczeniowy najcz
ęś
ciej
nie jest widoczny z zewn
ą
trz
nie jest widoczny z zewn
ą
trz (a zatem nie jest to
PC z klawiatur
ą
, monitorem, ... ),
systemy wbudowane najcz
ęś
ciej (na szcz
ęś
cie)
nie s
ą
swobodnie
nie s
ą
swobodnie
programowalne
programowalne,
interfejsy u
ż
ytkownika s
ą
cz
ę
sto bardzo specyficzne albo nawet ich nie ma,
platforma rozwojowa
platforma rozwojowa (ang. development platform) i
platforma docelowa
platforma docelowa (ang.
target platform) dla oprogramowania s
ą
wła
ś
ciwie zawsze ró
ż
ne,
b
ę
d
ą
ce do dyspozycji
zasoby sprz
ę
towe
zasoby sprz
ę
towe (ang. hardware) s
ą
cz
ę
sto bardzo
ograniczone (przyczyna: koszty, zu
ż
ycie energii, ci
ęż
ar, ograniczone miejsce, ... ).
Systemy czasu rzeczywistego RT - wprowadzenie
Typowe własno
ś
ci systemu RT (Real Time):
jest wbudowany
jest wbudowany (ang. embedded): RT-(Software-)system jest składnikiem
wi
ę
kszego układu sprz
ę
towo/ programowego i najcz
ęś
ciej steruje/ reguluje
obiekt techniczny,
interakcja z zewn
ę
trznym otoczeniem
interakcja z zewn
ę
trznym otoczeniem: system RT współdziała z otoczeniem
zewn
ę
trznym, które najcz
ęś
ciej nie jest „człowiekiem” – sensory do
nadzorowania
ś
rodowiska systemu technicznego i aktuatory do kontroli
otoczenia,
jest reaktywny
jest reaktywny (ang. reactive): systemy RT s
ą
cz
ę
sto „nap
ę
dzane”
zdarzeniami i musz
ą
reagowa
ć
na zewn
ę
trzn
ą
stymulacj
ę
– odpowied
ź
/ reakcja
jest cz
ę
sto zale
ż
na od stanu (sygnału),
warunki czasowe
warunki czasowe (ang. timing constraints): dane wej
ś
ciowe/ zdarzenia
musz
ą
by
ć
przetworzone w zadanym (okre
ś
lonym) czasie; wymagana jest nie
tylko poprawno
ść
realizacji zada
ń
, ale tak
ż
e wykonanie ich we wła
ś
ciwym
czasie,
współbie
ż
no
ść
współbie
ż
no
ść
(ang. concurrent): wiele działa
ń
jest wykonywanych albo
rzeczywi
ś
cie równocze
ś
nie (równolegle), albo s
ą
one czasowo powi
ą
zane,
rozproszenie
rozproszenie (ang. distributed): rozproszony system RT działa na wielu
w
ę
złach (procesorach), które s
ą
poł
ą
czone sieci
ą
komunikacyjn
ą
.
Typowe własno
ś
ci systemu RT
23
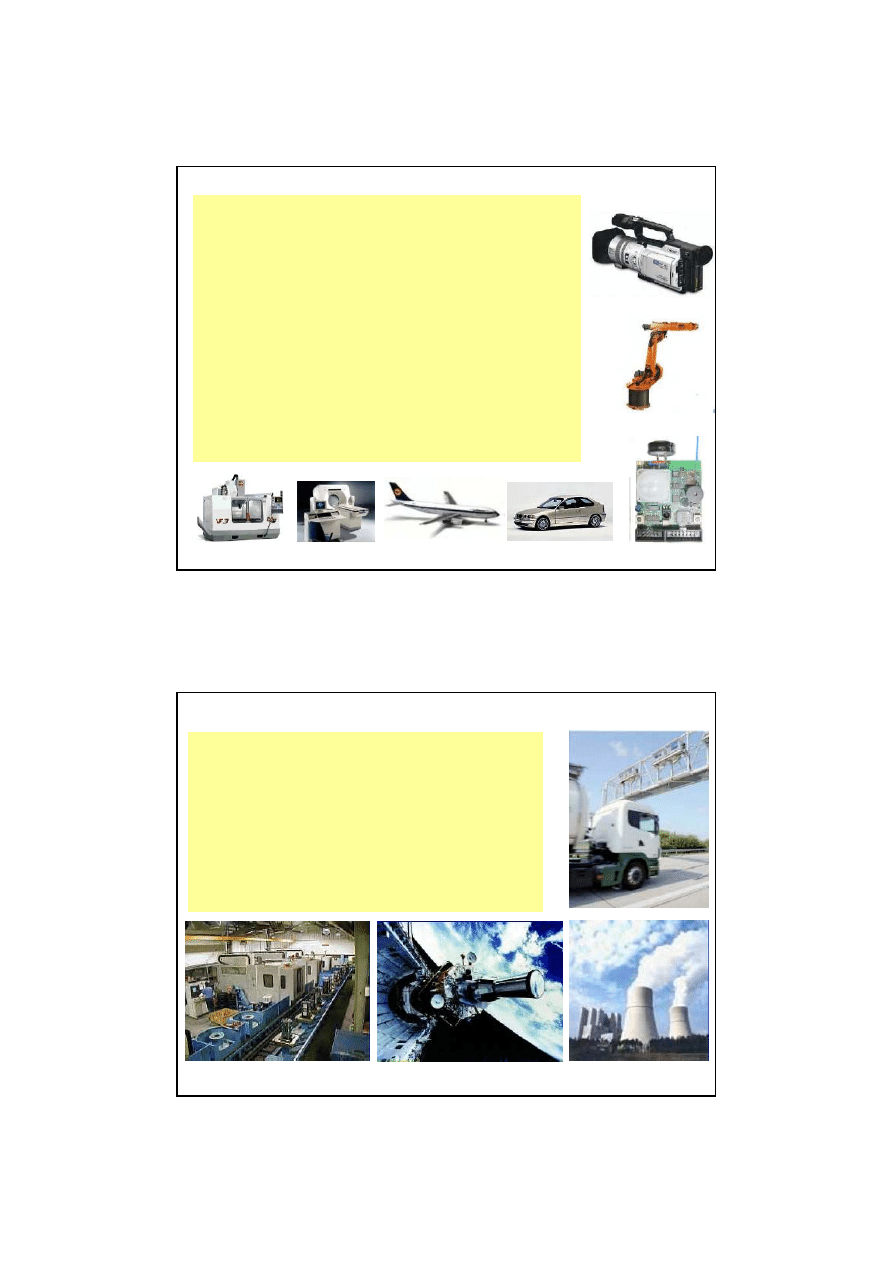
Przykłady systemów wbudowanych
Poszczególne urz
ą
dzenia i maszyny:
Poszczególne urz
ą
dzenia i maszyny:
sprz
ę
t codziennego u
ż
ytku: urz
ą
dzenia kuchenne,
odtwarzacze CD, aparaty fotograficzne i kamery, gry
video,
urz
ą
dzenia peryferyjne komputerów: drukarka, modem,
telekomunikacja: urz
ą
dzenia transmisyjne, telefony
komórkowe,
wytwarzanie: obrabiarki, roboty przemysłowe,
transport: samochody, poci
ą
gi, sygnalizacja
ś
wietlna,
technika medyczna: tomograf komputerowy,
automatyzacja produkcji.
Przykłady systemów wbudowanych
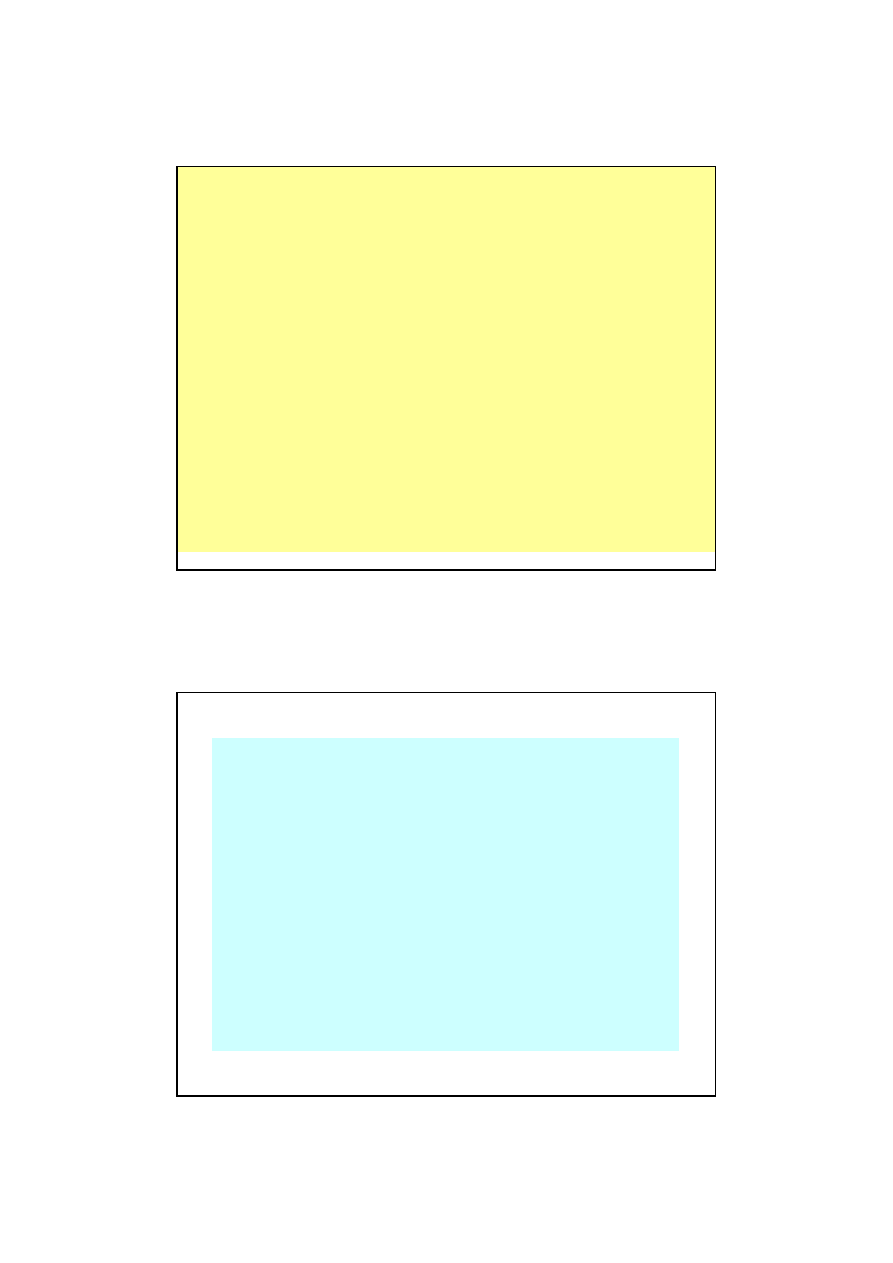
Zło
ż
one instalacje techniczne:
Zło
ż
one instalacje techniczne:
instalacje wytwórcze, elektrownie,
kierowanie ruchem w transporcie,
systemy satelitarne, komunikacja w skali
globalnej,
technika budowlana,
instalacje i automatyzacja procesów.
24
Technika i
ś
rodki transportowe:
•
systemy kierowania ruchem l
ą
dowym, morskim i lotniczym, takie jak lampy, elektroniczne tablice nad drogami, systemy
parkowania, instalacje pozyskiwania informacji o ruchu, nastawniki, instalacje radarowe, radiowe układy namierzania i
kierowania,
•
samochody, poci
ą
gi, samoloty i statki, które zawieraj
ą
ró
ż
norodne systemy wbudowane, np. sterowanie układami
nap
ę
dowymi, systemy Fly-by-wire, stabilizacja poło
ż
enia samolotu, systemy zapobiegaj
ą
ce blokowaniu hamulców i
regulacji dynamiki toru jazdy, sterowanie poduszek powietrznych, blokowanie dróg jazdy, centralna blokada, sterowanie
podnoszenia szyb, sterowanie
ś
wiatłem wewn
ę
trznym, regulacja instalacji klimatyzacyjnej.
Technika komunikacyjna:
•
telefony komórkowe,
•
urz
ą
dzenia ko
ń
cowe sieci stacjonarnych: telefon, fax, modem,
•
urz
ą
dzenia poł
ą
cze
ń
sieciowych.
Sprz
ę
t gospodarstwa domowego:
•
kuchenki mikrofalowe, pralki, zmywarki do naczy
ń
,
•
zdalna obsługa,
•
telewizory, radiobudziki, odtwarzacze CD, urz
ą
dzenia satelitarne, odtwarzacze CD,
•
konsole do gier, zabawki z efektami
ś
wietlnymi i d
ź
wi
ę
kowymi,
•
aparaty fotograficzne, kamery wideo.
Budynki:
•
sterowanie ogrzewaniem, sterowanie o
ś
wietleniem, centralne zamki, magistrale domowe,
•
instalacje przeciwpo
ż
arowe i przeciwłamaniowe.
Technika ochrony
ś
rodowiska:
•
sterowanie i nadzorowanie w elektrowniach,
•
kontrola emisji.
Technika medyczna:
•
systemy dla pacjentów takie jak stymulatory serca, urz
ą
dzenia słuchowe, funkcjonalne protezy,
•
urz
ą
dzenia medycyny ratunkowej takie jak np. defibrylatory, urz
ą
dzenia oddechowe,
•
urz
ą
dzenia pomiarowe, systemy diagnostyczne i systemy nadzorowania pacjentów, takie jak elektrokardiograf,
elektroencefalograf, tomograf, monitor funkcji
ż
yciowych,
•
urz
ą
dzenia do na
ś
wietlania, urz
ą
dzenia do terapii ruchowej.
Przykłady zastosowania systemów wbudowanych
Zwi
ę
kszenie komfortu w prostych wyrobach (np. pralki
automatyczne, itp.)
Zmniejszenie wielko
ś
ci i masy (np. przeno
ś
ny telewizor, itp.)
Zwi
ę
kszenie mobilno
ś
ci (telefony, pagery, itp.)
Zwi
ę
kszenie efektywno
ś
ci/ funkcjonalno
ś
ci (np. aparat
fotograficzny w telefonie komórkowym, itp.)
Zwi
ę
kszenie bezpiecze
ń
stwa (np. ABS, ESP)
Zwi
ę
kszenie mo
ż
liwo
ś
ci piel
ę
gnacji (np. jednostki diagnostyczne,
itp.)
Zmniejszenie kosztów produkcji (mechanika
→
elektronika)
Zmniejszenie zu
ż
ycia energii (np. elektroniczna regulacja
temperatury)
Personalizacja urz
ą
dze
ń
Przyczyny stosowania systemów wbudowanych
25
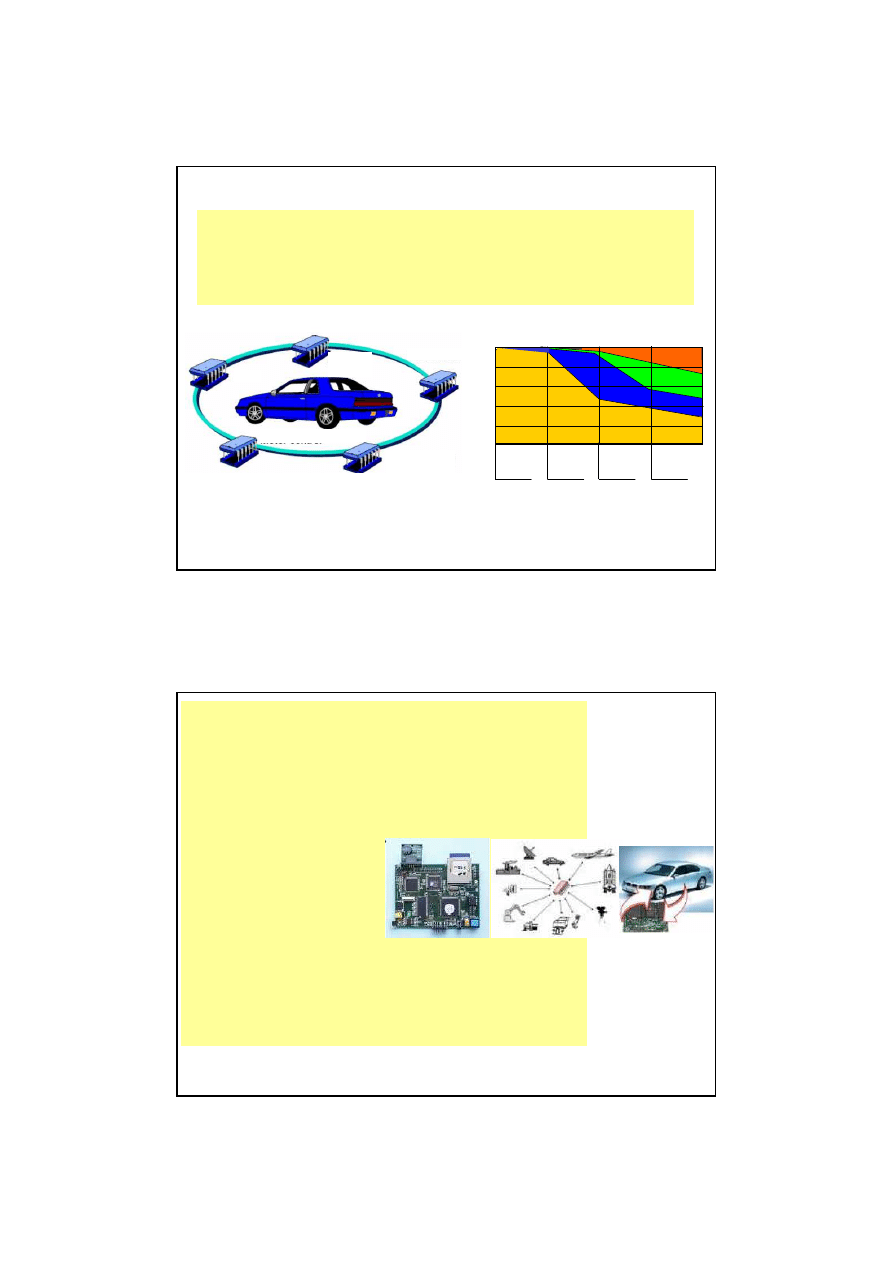
Gospodarcze znaczenie systemów wbudowanych:
Uzyskiwanie korzy
ś
ci wynikaj
ą
cych z konkurencji na rynku dzi
ę
ki
kombinacji oprogramowania i sprz
ę
tu (szybsza realizacja zło
ż
onych
funkcji, ... ),
Koszty wbudowanej elektroniki np. w nowoczesnym samolocie z
500 procesorami s
ą
wi
ę
ksze ni
ż
30%, z czego 80% przypada na
oprogramowanie,
Udział kosztów w obszarze pojazdów (samochodów) jest podobny
(obecnie do 100 procesorów),
Prawie 90% wszystkich elementów elektronicznych jest
stosowanych w systemach wbudowanych,
Rynek procesorów w 2003 r.:
- 200 mln procesorów w komputerach PC i serwerach,
- 8 mld procesorów w systemach wbudowanych.
Znaczenie systemów wbudowanych
Rodzaje systemów wbudowanych (1): zamkni
ę
te,
lokalne systemy
Sterownik komputerowy wykorzystuje wiele sensorów i aktuatorów.
System ma jedno (rzadko wi
ę
cej) na stałe zdefiniowane zadanie (-a).
Otoczenie
Sensor
Sterownik
komputerowy
Aktuator
Typowe własno
ś
ci:
Typowe własno
ś
ci:
- do czasu pracy stała konfiguracja,
- najcz
ęś
ciej stałe wymagania,
- wysoka niezawodno
ść
,
- sterowanie zdarzeniami,
- praca w czasie rzeczywistym.
Typowe przykłady:
Typowe przykłady:
- sprz
ę
t gospodarstwa domowego,
- sterowanie maszyn (urz
ą
dze
ń
),
- urz
ą
dzenia medyczne,
- elektronika domowa.
26
Rodzaje systemów wbudowanych (2): zamkni
ę
te,
rozproszone systemy
Wiele sterowników komputerowych komunikuje si
ę
przez dedykowane
poł
ą
czenia lub sieci miejscowe.
Od czasu do czasu dochodz
ą
nowe aplikacje.
Sterownik
komputerowy
Sterownik
komputerowy
Sterownik
komputerowy
Typowe własno
ś
ci:
Typowe własno
ś
ci:
- do czasu pracy stała konfiguracja,
- od czasu do czasu dodatkowe
wymagania,
- „graceful degradation” – fail safe,
- sterowanie zdarzeniami,
- praca w czasie rzeczywistym.
Typowe przykłady:
Typowe przykłady:
- sterowanie pojazdów,
- linie produkcyjne,
- sterowanie d
ź
wigów
osobowych (wind).
Rodzaje systemów wbudowanych (3): otwarte,
rozproszone systemy
Zmieniaj
ą
ce si
ę
urz
ą
dzania komunikuj
ą
si
ę
przez dynamicznie tworzone
poł
ą
czenia (np. przez Internet lub fale radiowe).
Nowe aplikacje daj
ą
si
ę
instalowa
ć
podczas pracy systemu .
Sterownik
komputerowy
Sterownik
komputerowy
Sterownik
komputerowy
Sterownik
komputerowy
Fale
radiowe
Internet
Typowe własno
ś
ci:
Typowe własno
ś
ci:
- zmienna konfiguracja,
- szybko zmieniaj
ą
ce si
ę
wymagania,
- niezawodna identyfikacja i pewne
poł
ą
czenia,
- elastyczno
ść
i odporno
ść
.
Typowe przykłady:
Typowe przykłady:
- Webcams,
- sieci Bluetooth,
- inteligentne sieci domowe,
- rozproszone aplikacje
SmartCard.
27
Systemów wbudowanych wokół nas jest coraz wi
ę
cej. Wielko
ść
rynku systemów operacyjnych typu embedded
liczona jest w setkach milionów dolarów, a by
ć
mo
ż
e przekroczyła ju
ż
nawet miliard dolarów. Oznacza to,
ż
e
producenci maj
ą
o co walczy
ć
. Kilkadziesi
ą
t lat temu systemy wbudowane wyst
ę
powały głównie w
wyrafinowanych urz
ą
dzeniach zwi
ą
zanych z automatyk
ą
przemysłow
ą
i medyczn
ą
, lotnictwem czy satelitami.
Przeci
ę
tny u
ż
ytkownik nie miał z nimi do czynienia i nawet nie wiedział o ich istnieniu. Rewolucja informatyczna i
miniaturyzacja, które nast
ą
piły w latach osiemdziesi
ą
tych XX w. kompletnie zmieniły ten stan rzeczy.
Do urz
ą
dze
ń
przemysłowych doł
ą
czyły w ci
ą
gu ostatnich kilkunastu latach ró
ż
ne urz
ą
dzenia domowe – np.
tunery satelitarne, odtwarzacze DVD i urz
ą
dzenia podr
ę
czne, np. handheldy, palmtopy i telefony komórkowe.
Znakomita wi
ę
kszo
ść
urz
ą
dze
ń
embedded – niezale
ż
nie od tego, czy mówimy o nowoczesnym telefonie
komórkowym, czy o marsja
ń
skim łaziku musi by
ć
wyposa
ż
ona w system operacyjny czasu rzeczywistego
RTOS (ang. Real Time Operating System). Jest to konieczne, aby zagwarantowa
ć
odpowiedni
ą
szybko
ść
reakcji na zachodz
ą
ce zdarzenia. Co wi
ę
cej, bior
ą
c pod uwag
ę
,
ż
e 98% produkowanych procesorów
wykorzystywanych jest wła
ś
nie w urz
ą
dzeniach typu embedded, to rynek i potencjalne zyski do podziału s
ą
gigantyczne.
Istnieje kilkadziesi
ą
t systemów operacyjnych wykorzystywanych w urz
ą
dzeniach typu embedded, ale takich,
które maj
ą
licz
ą
c
ą
si
ę
na rynku pozycj
ę
jest tylko kilka. Najpopularniejsze z nich to Microsoft Windows CE,
VxWorks firmy Wind River Systems i Symbian zaprojektowany przez Symbian Ltd. Te trzy systemy maj
ą
razem
prawie 70% rynku. W
ś
ród nich dominuje Microsoft Windows CE, który w 2005 r. miał blisko 30% udziału w
rynku. Warto jednak pami
ę
ta
ć
,
ż
e rynek RTOS jest pełen wyspecjalizowanych nisz, rz
ą
dz
ą
cych si
ę
własnymi
prawami. O ile Microsoft ma niemal 30% całego rynku systemów wbudowanych, to w przypadku nowoczesnych
telefonów komórkowych jest to ju
ż
tylko 15%. W tej dziedzinie króluje Symbian, który instalowany jest w 67%
tego typu urz
ą
dze
ń
.
Rynek urz
ą
dze
ń
embedded rozwija si
ę
niezwykle dynamicznie, głównie za spraw
ą
urz
ą
dze
ń
przeno
ś
nych. Nic
wi
ę
c dziwnego,
ż
e producenci systemów operacyjnych intensyfikuj
ą
prace nad ulepszeniem swoich produktów,
zwi
ę
kszaj
ą
c ich niezawodno
ść
i minimalizuj
ą
c wymagania sprz
ę
towe. Cho
ć
moc obliczeniowa i pami
ęć
staj
ą
si
ę
z roku na rok coraz ta
ń
sze, to rosn
ą
równie
ż
wymagania u
ż
ytkowników i stopie
ń
zło
ż
ono
ś
ci urz
ą
dze
ń
, a co za
tym idzie - wymagania stawiane u
ż
ywanym systemom operacyjnym staj
ą
si
ę
coraz wi
ę
ksze. Przykładem takiej
ewolucji jest Windows CE.
Rozwój systemów wbudowanych
Technologie informacyjne w wyrobach – systemy wbudowane
Systemy wbudowane ES (ang. Embedded Systems):
s
ą
to układy mikroprocesorowe stosowane w systemach technicznych (np. samochodach, samolotach),
najcz
ęś
ciej s
ą
one ukryte oraz zwykle s
ą
reaktywnymi lub hybrydowymi systemami z wymaganiami czasu
rzeczywistego,
podlegaj
ą
silnie ograniczaj
ą
cym warunkom brzegowym:
przejmuj
ą
zadania regulacji,
maj
ą
wy
ż
sze wymagania dotycz
ą
ce jako
ś
ci i bezpiecze
ń
stwa,
maj
ą
zdolno
ść
do pracy w czasie rzeczywistym oraz wysok
ą
niezawodno
ść
.
• minimalne zu
ż
ycie energii,
• minimalna wielko
ść
(gabaryty),
• minimalna masa,
• minimalne koszty,
•
…
28
Technologie informacyjne w wyrobach - samochód
Wi
ę
ksze bezpiecze
ń
stwo przez zastosowanie systemów wbudowanych ES (ang.
Embedded Systems) w samochodach:
do 40% kosztów i 90% innowacji uzyskuje si
ę
dzi
ę
ki technologiom informacyjnym IT
(ang. Information Technology),
do 80 mikroprocesorów w samochodzie i ponad 100 MB oprogramowania.
Mecha-
nicznie
Elektro-
mecha-
nicznie
Mecha-
tronicznie
(obecnie)
Mecha-
tronicznie
(za 5 lat)
100
80
60
40
20
0
Udział kosztów wytwarzania w %
Mechanika
Układy
elektryczne
Elektronika
Oprogra-
mowanie
Wg Audi
Sterowanie
klimatyzacj
ą
Sterowanie silnikiem
ABS
Informacje
Skrzynia
biegów
Technologie informacyjne w wyrobach
mechatronicznych
Systemy wbudowane ES (ang. Embedded Systems):
- systemy (mikro-) komputerowe, które s
ą
wbudowane w
obiekty techniczne (np. samochody, samoloty, …),
- najcz
ęś
ciej niewidoczne i zwykle reaktywne lub hybrydowe,
- systemy z wymaganiami czasu rzeczywistego,
- podlegaj
ą
silnie ograniczaj
ą
cym warunkom brzegowym:
• minimalne zu
ż
ycie energii,
• minimalna wielko
ść
(gabaryty),
• minimalny ci
ęż
ar,
• minimalne koszty,
• …
Wbudowane oprogramowanie:
- przejmuje zadania regulacji w ES,
- wy
ż
sze wymagania dotycz
ą
ce jako
ś
ci i bezpiecze
ń
stwa:
• zdolno
ść
do pracy w czasie rzeczywistym, niezawodno
ść
, ...
29
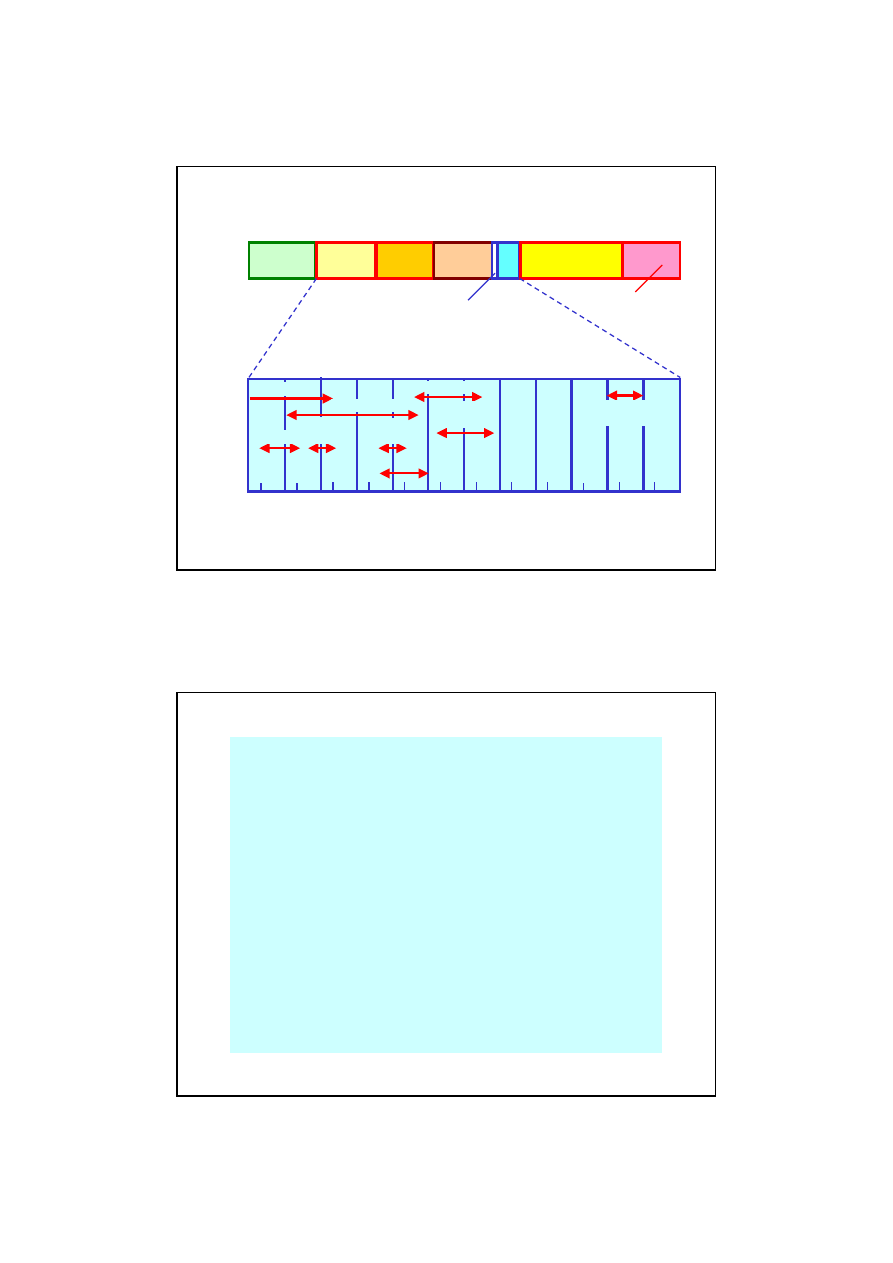
Fale elektromagnetyczne w transmisji danych
f [Hz] 10
0
10
2
10
4
10
6
10
8
10
10
10
12
10
14
10
16
10
18
10
20
10
22
10
24
Ś
wiatło
widzialne
Radio
Mikro-
fale
Podczer-
wie
ń
UV
Promienio-
wanie X
Promienio-
wanie Gamma
f [Hz] 10
4
10
5
10
6
10
7
10
8
10
9
10
10
10
11
10
12
10
13
10
14
10
15
10
16
Pasmo LF MF HF VHF UHF SHF EHT THF
Skr
ę
tka
Maritime
AM
radio
FM
radio
TV
Koncentryk
Satelity
Mikrofale
naziemne
Ś
wiatło-
wód
Cz
ę
stotliwo
ść
Media transmisyjne jako no
ś
niki fal elektromagnetycznych
Zwi
ą
zane z kablami:
Zwi
ą
zane z kablami:
• transmisja elektryczna:
- skr
ę
tka dwuparowa (ang. Twisted Pair Kabel),
- kabel koncentryczny (ang. Koaxial Kabel),
• transmisja optyczna:
-
ś
wiatłowód (jedno- i wielomodowy).
Bezprzewodowe:
Bezprzewodowe:
• transmisja za pomoc
ą
fal radiowych:
- wykorzystanie nielicencjonowanych zakresów pasma,
- wykorzystanie licencjonowanych zakresów pasma,
• transmisja za pomoc
ą
ś
wiatła:
- promienie lasera na
ś
rednie odległo
ś
ci,
- podczerwie
ń
na małe odległo
ś
ci.
30
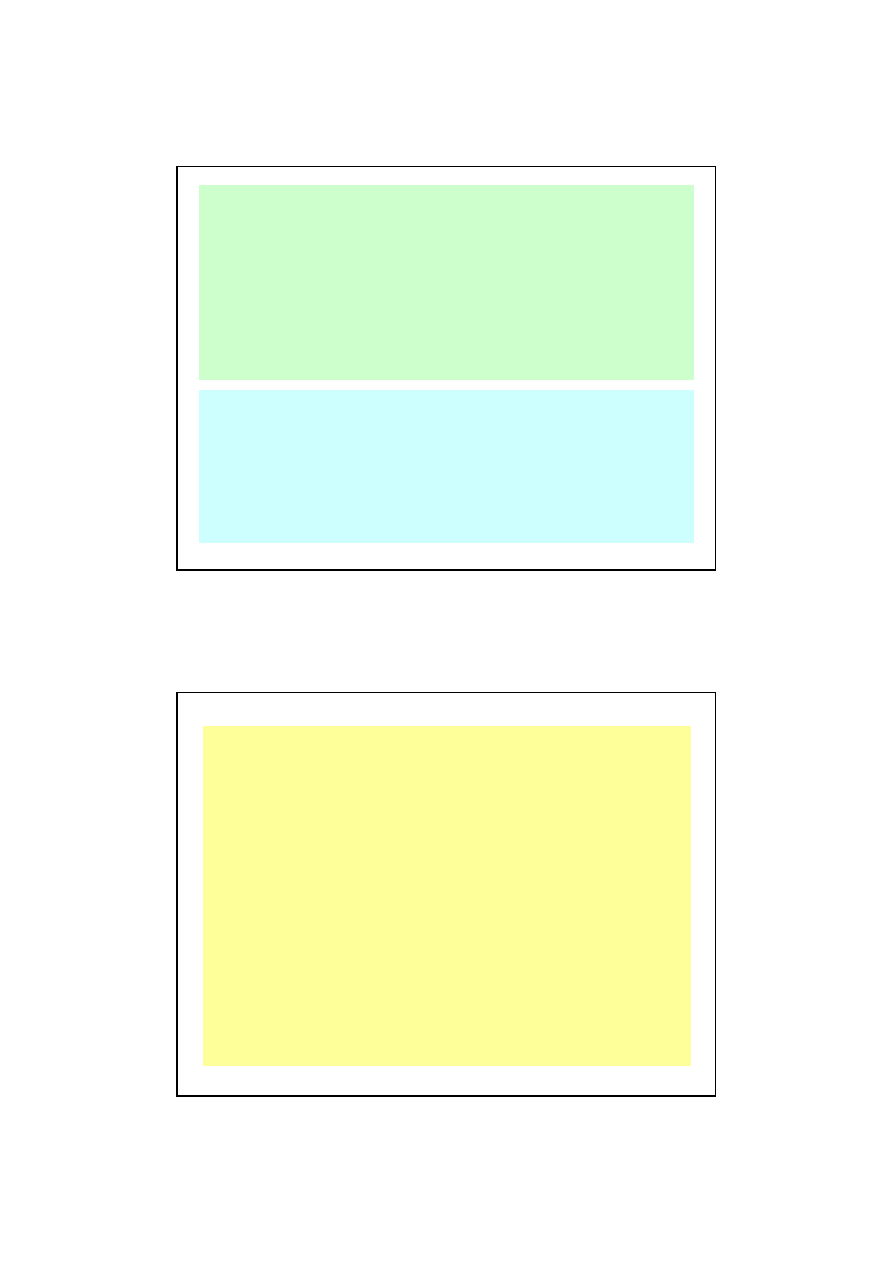
Komunikacja sieciowa jest stosowana w trzech głównych obszarach
automatyzacji:
Automatyzacja w przemy
ś
le: poł
ą
czenie w sie
ć
urz
ą
dze
ń
(sensorów,
aktuatorów, PLC, komputerów, …) w instalacjach przemysłowych
(wytwarzanie, technika procesowa, elektrownie, …)
Ś
rodki transportu (samochody, samoloty): poł
ą
czenie w sie
ć
urz
ą
dze
ń
sterowniczych (sterowników, komputerów), członów wykonawczych
(aktuatorów), sensorów, …
Automatyzacja budynków: poł
ą
czenie w sie
ć
urz
ą
dze
ń
i instalacji w
budynkach (ogrzewanie, o
ś
wietlenie, wentylacja, ...).
Sieciowe systemy komunikacyjne - wprowadzenie
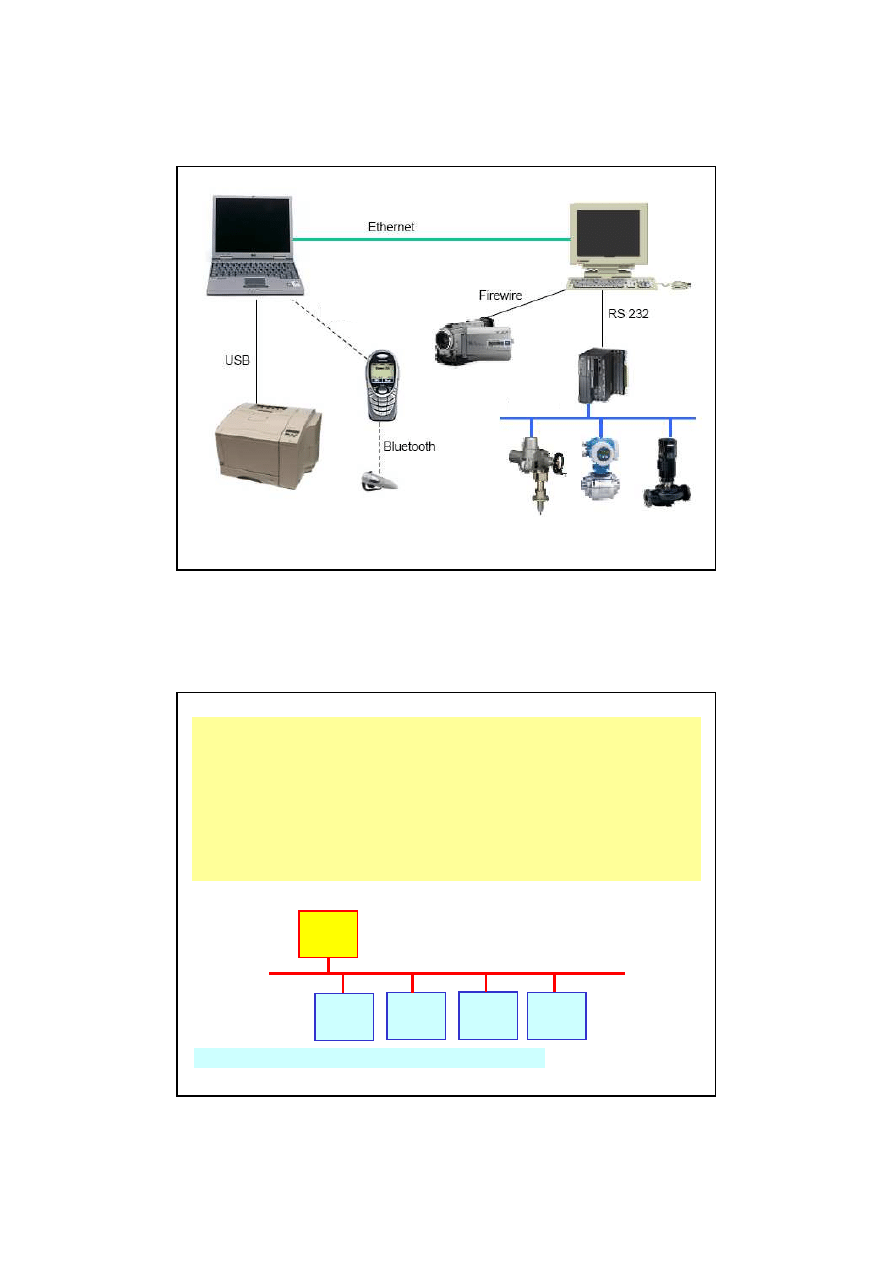
Systemy magistralowe,
Systemy komunikacyjne w tym obszarze s
ą
te
ż
okre
ś
lane jako magistrale,
poniewa
ż
najcz
ęś
ciej stosowana jest topologia liniowa (ale nie wył
ą
cznie),
Sie
ć
sensorów/ aktuatorów: na najni
ż
szym poziomie hierarchii,
Sie
ć
miejscowa (ang. Fieldbus): na poziomie sterowników i komputerów,
Ró
ż
norodne architektury i mechanizmy (magistrala/ pier
ś
cie
ń
/ gwiazda/
drzewo, Polling/ Token-Passing/ dost
ę
p losowy / TDMA, …).
W sieciowym systemie komunikacyjnym (magistrala szeregowa) wiele
składników (urz
ą
dze
ń
) elektronicznych dzieli si
ę
wspólnym medium
transmisyjnym. Dane s
ą
transmitowane szeregowo w postaci bitów i mog
ą
by
ć
w zasadzie odbierane przez wszystkich uczestników magistrali (ang.
Broadcasting), okre
ś
lanych tak
ż
e jako w
ę
zły sieci.
W odró
ż
nieniu do poł
ą
cze
ń
typu punkt-z-punktem nakłady zwi
ą
zane z
okablowaniem s
ą
tutaj znacznie mniejsze. Powoduje to zmniejszenie
zarówno kosztów jak i ci
ęż
aru. Ponadto zwi
ę
ksza si
ę
niezawodno
ść
całego
systemu mechatronicznego, a jego projektowanie staje si
ę
przejrzyste.
W zastosowaniach sieciowych systemów komunikacyjnych konieczne jest
uwzgl
ę
dnienie m.in. nast
ę
puj
ą
cych aspektów:
tworzenie ramek (ang. Framing), czyli budowa wiadomo
ś
ci,
adresowanie (tworzenie jednoznacznego przyporz
ą
dkowania ramki i w
ę
zła
sieci),
dost
ę
p do magistrali wzgl. utrzymanie warunków czasowych,
ochrona danych wzgl. obsługa bł
ę
dów oraz
synchronizacja.
Sieciowe systemy komunikacyjne
31
Szeregowe systemy komunikacyjne
Fieldbus
(szeregowy)
IrDA (ang. Infrared Data Acces)
IrDA
Magistrale i sieciowe systemy komunikacyjne
Magistrala
Magistrala (system komunikacyjny) ma wyra
ź
n
ą
struktur
ę
(topologi
ę
) tak
ą
jak: linia, pier
ś
cie
ń
czy drzewo i
jest przeznaczona do przesyłania (transmisji) informacji. Przez magistral
ę
okre
ś
la si
ę
układ przewodów, w
którym na zasadzie adresowania pracuj
ą
ró
ż
ne urz
ą
dzenia. W automatyzacji procesów cz
ę
sto stosowane
s
ą
standardowe magistrale, za pomoc
ą
których mog
ą
pracowa
ć
ró
ż
ne urz
ą
dzenia i składniki (komponenty).
W trybie pracy systemu komunikacyjnego Master-Slave urz
ą
dzenie nadrz
ę
dne (Master) kontroluje
działanie magistrali. Natomiast przył
ą
czone urz
ą
dzenia podrz
ę
dne (Slave’s) mog
ą
tylko odpowiada
ć
, gdy
s
ą
one odpytywane. W rozwi
ą
zaniu Multi-Master mo
ż
liwe jest rozpoczynanie komunikacji od ró
ż
nych
urz
ą
dze
ń
. Jednak wówczas musz
ą
by
ć
stosowane metody zapewniaj
ą
ce udost
ę
pnianie magistrali wzgl.
unikanie kolizji.
Przykłady: magistrala PCI w PC, sieci miejscowe (ang. Fieldbus).
Cykliczne odpytywanie Slave’ów przez Master nazywa si
ę
Polling’iem.
System komunikacyjny Master-Slave
Master
Slave
Slave
Slave
Slave
32
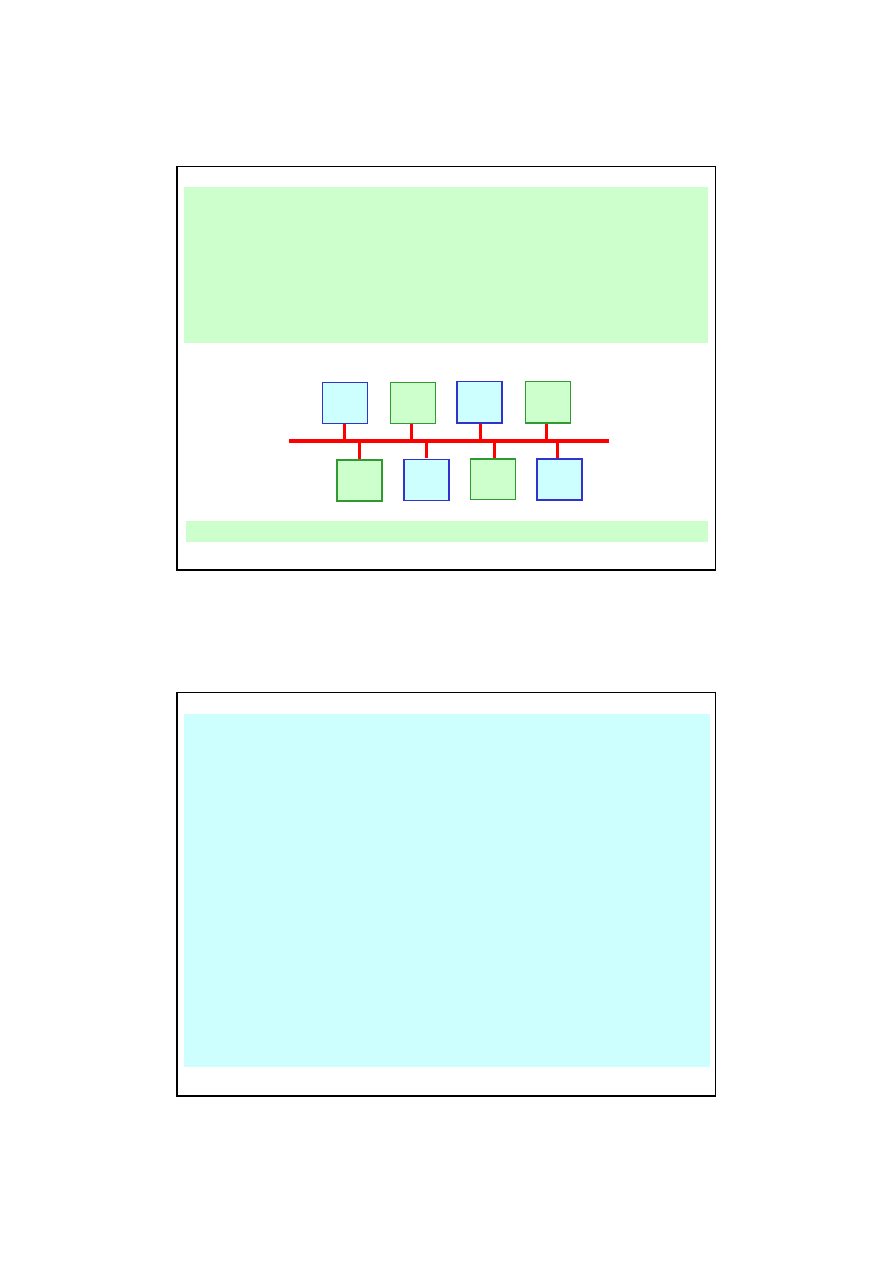
Sieciowe systemy komunikacyjne
Mechanizm sieciowy
Terminem mechanizmu sieciowego okre
ś
lany jest system komunikacyjny, który mo
ż
e mie
ć
równie
ż
zło
ż
on
ą
struktur
ę
z podsieciami, wieloma drogami transmisji lub ró
ż
norodnymi protokołami. Przez
podsieci (segmenty) i urz
ą
dzenia sieciowe z pami
ę
ci
ą
mo
ż
e by
ć
równocze
ś
nie przesyłanych wiele
informacji i wyrównywane ró
ż
ne szybko
ś
ci transmisji.
W modelu komunikacji sieciowej typu Client-Server przez Server’y s
ą
oferowane informacje lub
usługi. Client jest aktywny i wysyła
żą
danie na adres okre
ś
lonego Server’a. Nast
ę
pnie on (tzn. Server)
dostarcza Client’owi odpowiedniej informacji lub te
ż
wykonuje za
żą
dan
ą
usług
ę
. Zatem Server sam w
sobie nie jest aktywny. Typowymi sieciami Client-Server s
ą
Intranet i Internet, które s
ą
oparte na
protokole TCP/IP Ethernet’u.
Poj
ę
cia system z magistral
ą
i mechanizm sieciowy cz
ę
sto w praktyce nie s
ą
wyra
ź
nie rozró
ż
niane.
Sie
ć
Client-Server
Server
Server
Server
Server
Client
Client
Client
Client
Sieci miejscowe (ang. Fieldbus)
Miejscowe sieci komunikacyjne (ang. Fieldbus) zwykle ł
ą
cz
ą
urz
ą
dzenia steruj
ą
ce (sterowniki, regulatory,
komputery) bezpo
ś
rednio z czujnikami i aktuatorami. Ró
ż
ni
ą
si
ę
one swoimi własno
ś
ciami technicznymi i s
ą
stosowane tam, gdzie wyst
ę
puj
ą
specjalne wymagania dotycz
ą
ce obiektu (procesu), takie jak :
• liczba adresowanych urz
ą
dze
ń
,
• system Multimaster, przy czym sterowanie przez magistral
ę
mo
ż
e by
ć
przekazane z jednego urz
ą
dzenia do
innego,
• krótkie czasy reakcji wzgl. mo
ż
liwo
ść
pracy w czasie rzeczywistym (deterministycznie),
• wysoka efektywno
ść
przesyłania pakietów przy krótkich informacjach,
• pakiety z du
żą
ilo
ś
ci
ą
danych,
• niezawodno
ść
transmisji,
• odporno
ść
na włamania z zewn
ą
trz sieci,
• wymiana urz
ą
dze
ń
podczas pracy systemu (ang. Hot Swap),
• rozszerzalno
ść
(skalowalno
ść
),
• nakłady i koszty zwi
ą
zane z okablowaniem,
• koszt przył
ą
czanych układów,
• odporno
ść
(mechaniczna, elektryczna),
• dost
ę
pno
ść
wymaganych składników (sensorów, aktuatorów, urz
ą
dze
ń
peryferyjnych),
• wsparcie techniczne, istniej
ą
ce do
ś
wiadczenia, rozpowszechnienie standardów,
• zasilanie urz
ą
dze
ń
obiektowych (o małym poborze mocy, np. czujników) przez magistral
ę
(przewody
sygnałowe).
33
Protokół Hart (ang. Highway Addressable Remote Transducer) umo
ż
liwia transmisj
ę
sygnałów cyfrowych
przez analogow
ą
p
ę
tl
ę
pr
ą
dow
ą
4...20 mA, bez oddziaływania na sygnał analogowy. Na zmieniaj
ą
cy si
ę
wolno
sygnał analogowy jest nakładany sygnał o zmiennym napi
ę
ciu. Dla warto
ś
ci bitów 0 i 1 s
ą
do dyspozycji dwie
cz
ę
stotliwo
ś
ci (2200 Hz, 1200 Hz). Ten protokół jest stosowany przede wszystkim wtedy, gdy do cyfrowej
komunikacji powinno by
ć
wykorzystane istniej
ą
ce ju
ż
okablowanie analogowe. Mo
ż
e wówczas pracowa
ć
wiele
urz
ą
dze
ń
z odpowiednimi własnymi adresami na jednym przewodzie z przeł
ą
cznikiem (ang. Multiplexer) i
adresowaniem.
Sie
ć
MOD-Bus ma prosto programowalny protokół dla systemu Master-Slave. Do transmisji danych
wykorzystywany jest interfejs RS-485.
Sie
ć
CAN (ang. Controler Area Network, ISO 11898) została opracowana pierwotnie do zastosowania w
samochodach osobowych w celu integracji składników. Nast
ę
pnie została ona rozszerzona jako CANOpen
(Europa) wzgl. DeviceNet (USA) z odpowiednim oprogramowaniem do automatyzacji i jest cz
ę
sto stosowana.
Do transmisji jest wykorzystywany interfejs RS-485.
Sie
ć
Profibus (EN 50 170) jest natomiast stosowana w wi
ę
kszych instalacjach przemysłowych i do
niezawodnej transmisji wi
ę
kszych ilo
ś
ci danych. Jest ona rozpowszechniona głównie w Europie. Rozró
ż
nia si
ę
trzy odmiany sieci Profibus:
• Profibus PA (do automatyzacji procesów, w obszarach zagro
ż
onych wybuchem),
• Profibus DP (niem. Dezentrale Peripherie),
• Profibus FMS (ang. Fieldbus Message Specification). Do transmisji wykorzystywany jest interfejs RS-485.
Ta odmiana jest wycofywana z zastosowa
ń
.
• PROFInet (PROcess Field net). Ta technika jest jeszcze nadal rozwijana i umo
ż
liwia ona wł
ą
czenie w sie
ć
,
za pomoc
ą
Ethernet’u, poszczególnych elementów równie
ż
na poziomie obiektowym (Ethernet do czujników i
nap
ę
dów). Mo
ż
na w niej nadal stosowa
ć
istniej
ą
ce ju
ż
standardy (Fieldbus, OPC). Wyst
ę
puj
ą
ce problemy
zwi
ą
zane ze sterowaniem w czasie (ang. Realtime) s
ą
rozwi
ą
zywane przez podział sieci na segmenty i
rozszerzenie do sterownika przez przeł
ą
czniki sieciowe (ang.Switche’s).
Sieci miejscowe (Fieldbus)
Za pomoc
ą
sieci miejscowej (obiektowej) AS-i (ang. Aktuator-Sensor-Interface) jest okre
ś
lany system
komunikacyjny, w którym poszczególne składniki (urz
ą
dzenia) mo
ż
na przył
ą
czy
ć
bez stosowania narz
ę
dzi do
elastycznego kabla z zasilaniem i komunikacj
ą
. Ostre kołki przebijaj
ą
cienk
ą
izolacj
ę
kabla i ł
ą
cz
ą
si
ę
z
odpowiednimi przewodami (poł
ą
czenie na tzw. „wampirki”, bez u
ż
ycia zł
ą
czy z gniazdami wtykowymi).
Uzupełnienie: czas rzeczywisty (ang. Real time)
Wzmaganie dotycz
ą
ce zdolno
ś
ci do pracy w czasie rzeczywistym oznacza,
ż
e informacja w
ś
ci
ś
le
okre
ś
lonym czasie musi dotrze
ć
do odbiorcy. W zale
ż
no
ś
ci od aplikacji ten czas mo
ż
e wynosi
ć
kilka sekund
(np. zarz
ą
dzanie magazynem) lub te
ż
kilka milisekund (np. sterowanie obrabiarek). Rosn
ą
równie
ż
wymagania dotycz
ą
ce pewno
ś
ci transmisji danych (bezpiecze
ń
stwa, niezawodno
ś
ci). I tak np. komunikacja
pomi
ę
dzy obwodami bezpiecze
ń
stwa (ang. Safety) instalacji musi by
ć
wykonana w sposób niezawodny.
Dlatego te
ż
istniej
ą
ce sieci miejscowe s
ą
dalej rozwijane w kierunku bezpiecze
ń
stwa (DeviceNetSafety,
PROFISafe, AsiSafety at work).
Przemysłowa transmisja bezprzewodowa (radiowa)
Na obszarze Unii Europejskiej do transmisji bezprzewodowej z ograniczon
ą
moc
ą
sygnału nadawania s
ą
dost
ę
pne bez licencji cz
ę
stotliwo
ś
ci 869 MHz i w pa
ś
mie 2,4GHz. Te tzw. cz
ę
stotliwo
ś
ci ISM (ang. Industrial,
Scientific, Medical) mog
ą
by
ć
równie
ż
stosowane do bezprzewodowej transmisji danych w przemy
ś
le.
Mo
ż
liwe s
ą
przy tym szybko
ś
ci transmisji do 54Mbit/s (IEEE 802.11g). Istniej
ą
dwie metody transmisji, tzn.
DSSS (ang. Direct Sequence Spread Spectrum) z mo
ż
liwo
ś
ci
ą
wy
ż
szej szybko
ś
ci transmisji i FHSS (ang.
Frequence Hopping Spread Spectrum) o wi
ę
kszej odporno
ś
ci na zakłócenia.
Technika radiowa jest równie
ż
podstaw
ą
, na której zbudowane s
ą
sieci bezprzewodowe WLAN (ang. Wireles
Local Area Network) do komunikacji z komputerami. Rozwijane s
ą
tak
ż
e sieci do bezprzewodowej
komunikacji z sensorami, dzi
ę
ki czemu mo
ż
liwa jest transmisja danych pomiarowych, odpytywanie o status
urz
ą
dzenia oraz zmiana jego parametrów (parametryzacja). W tego rodzaju rozwi
ą
zaniach sieci (ang. mesh
network) urz
ą
dzenia podejmuj
ą
samoczynnie poł
ą
czenie z innymi dost
ę
pnymi urz
ą
dzeniami, nie wyst
ę
puje
ż
adne urz
ą
dzenie nadrz
ę
dne (Master), a dane mog
ą
by
ć
transmitowane z wykorzystaniem ró
ż
nych dróg
poł
ą
cze
ń
.
Sieci komunikacyjne c.d.
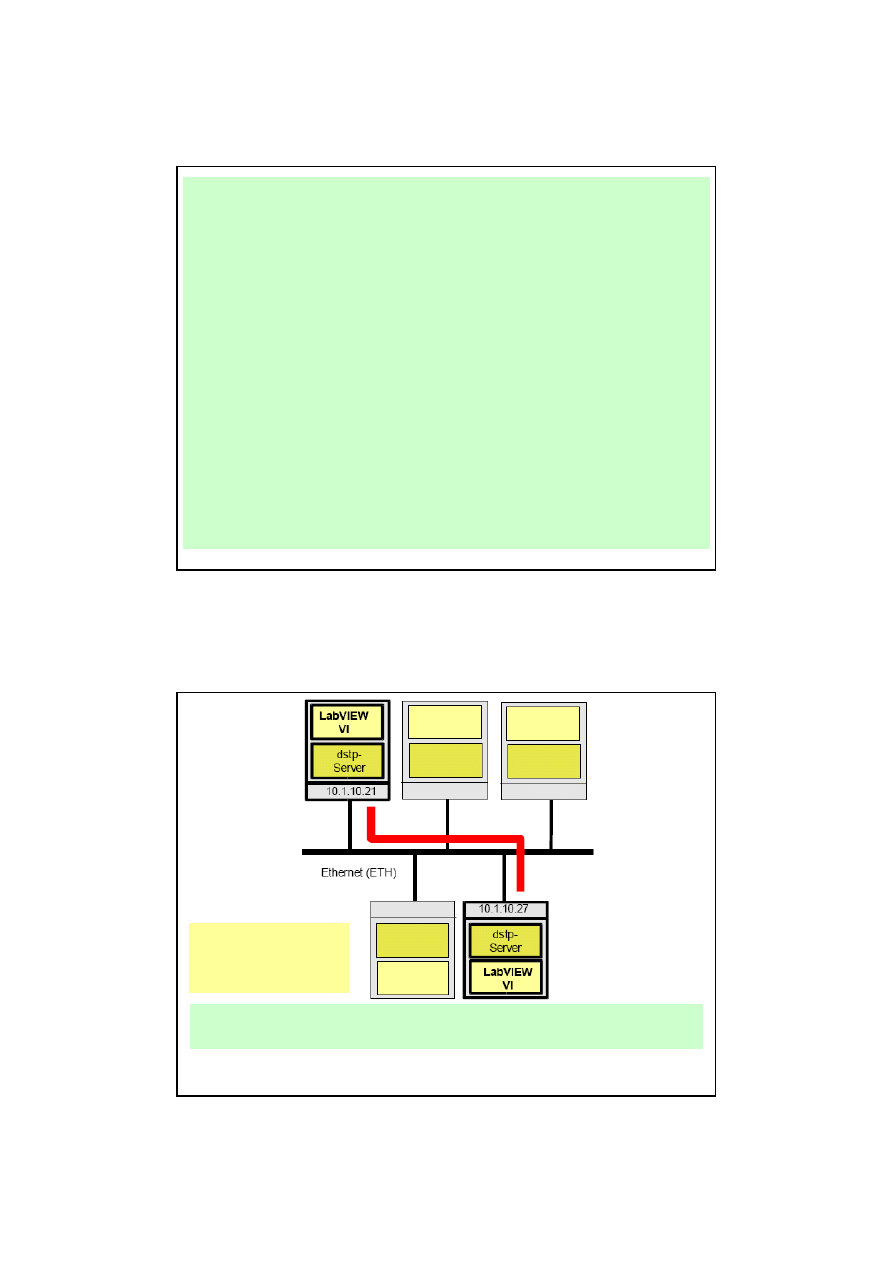
34
Ethernet
Poj
ę
ciem Ethernet jest okre
ś
lany cały system techniczny, z którego zbudowane s
ą
zwykle lokalne sieci
komputerowe LAN (ang. Local Area Network). Nale
żą
do niego np.:
• kabel,
• zł
ą
cza (gniazda i wtyki),
• karty sieciowe w komputerze,
• przeł
ą
cznik sieciowy (ang. Switch), który wyodr
ę
bnia segmenty sieci,
• Router (przej
ś
cie do innych sieci).
W pracy komputerowych sieci komunikacyjnych przyj
ę
ło si
ę
wiele standardów, np. dla:
• własno
ś
ci elektrycznych sygnałów (napi
ę
cia, szybko
ść
transmisji),
• rodzaju kodowania (np. kod Manchester),
• metod dost
ę
pu (np. z rozpoznawaniem kolizji),
• budowy pakietów.
Jakie znaczenie ma zawarto
ść
pakietów i jak jest uzyskiwana niezawodna transmisja nie s
ą
tutaj okre
ś
lone.
Dlatego te
ż
w jednej i tej samej sieci Ethernet mog
ą
by
ć
wymieniane dowolne zawarto
ś
ci informacji w ró
ż
nych
protokołach (np. http, ftp, dstp). Za pomoc
ą
tylko jednorazowo wyst
ę
puj
ą
cego adresu dla ka
ż
dego komputera
daje si
ę
utworzy
ć
poł
ą
czenie transmisyjne. Je
ż
eli wymiana informacji powinna si
ę
odbywa
ć
w obu kierunkach,
to dla ka
ż
dego protokołu w obu komputerach musi by
ć
zainstalowany serwer (program komputerowy), który ze
swojej strony tworzy poł
ą
czenie z programem aplikacyjnym (tutaj narz
ę
dzie wirtualne).
Aby Ethernet mógł by
ć
w sposób uniwersalny wykorzystywany w przemy
ś
le, to tak
ą
mo
ż
liwo
ść
daje m.in. jego
niestandardowy wariant, w którym magistrala danych zapewnia równie
ż
zasilanie urz
ą
dze
ń
o małej mocy (PoE:
Power over Ethernet). W sieciach bezprzewodowych WLAN (ang. Wireless LAN) kable miedziane (skr
ę
tka)
lub
ś
wiatłowód s
ą
zast
ę
powane przez fale radiowe. W ten sposób mo
ż
na uzyska
ć
zasi
ę
g w terenie do 300 m, a
w budynkach jest on znacznie mniejszy. Dane s
ą
przesyłane w protokole TCP/IP.
Data Socket Transfer Protocol (specjalny
protokół w LabVIEW)
Pomi
ę
dzy Server’ami daj
ą
si
ę
transmitowa
ć
dane z elementów ekranu monitora lub dane z przył
ą
czonych
urz
ą
dze
ń
. Ka
ż
de wirtualne urz
ą
dzenie VI (ang. Virtual Instrument) mo
ż
e przy tym zapisywa
ć
dane na swój
Server, który nast
ę
pnie mo
ż
e by
ć
odpytywany przez inne VI (jako Client).
LabView – oprogramowanie
firmy NI (National Instruments)
do tworzenia aplikacji dla
pomiarów, sterowania, warstw
obsługi itp.
35
Protokoły i usługi w sieciowych systemach komunikacyjnych
Protokół:
Protokół:
znana liczba reguł i formatów, które s
ą
wykorzystywane do komunikacji pomi
ę
dzy procesami
w celu wykonania okre
ś
lonego zadania.
Usługa:
Usługa:
- realizacja zdefiniowanego zadania,
- usługobiorca i usługodawca komunikuj
ą
si
ę
za
pomoc
ą
okre
ś
lonego interfejsu.
Warunki fizyczne:
Warunki fizyczne:
•
• zastosowanie odpowiednich metod, aby przez medium móc
transmitowa
ć
informacje.
Topologia:
Topologia:
•
• fizyczna struktura sieci.
Sterowanie dost
ę
pem
Sterowanie dost
ę
pem (przy wspólnie wykorzystywanym medium):
•
• koordynacja wielu nadajników, aby unikn
ąć
kolizji i tym samym
zniszczenia informacji,
•
• rozwi
ą
zania dost
ę
pu:
- równouprawniony (ang. Fairness),
- z priorytetem.
Media transmisyjne
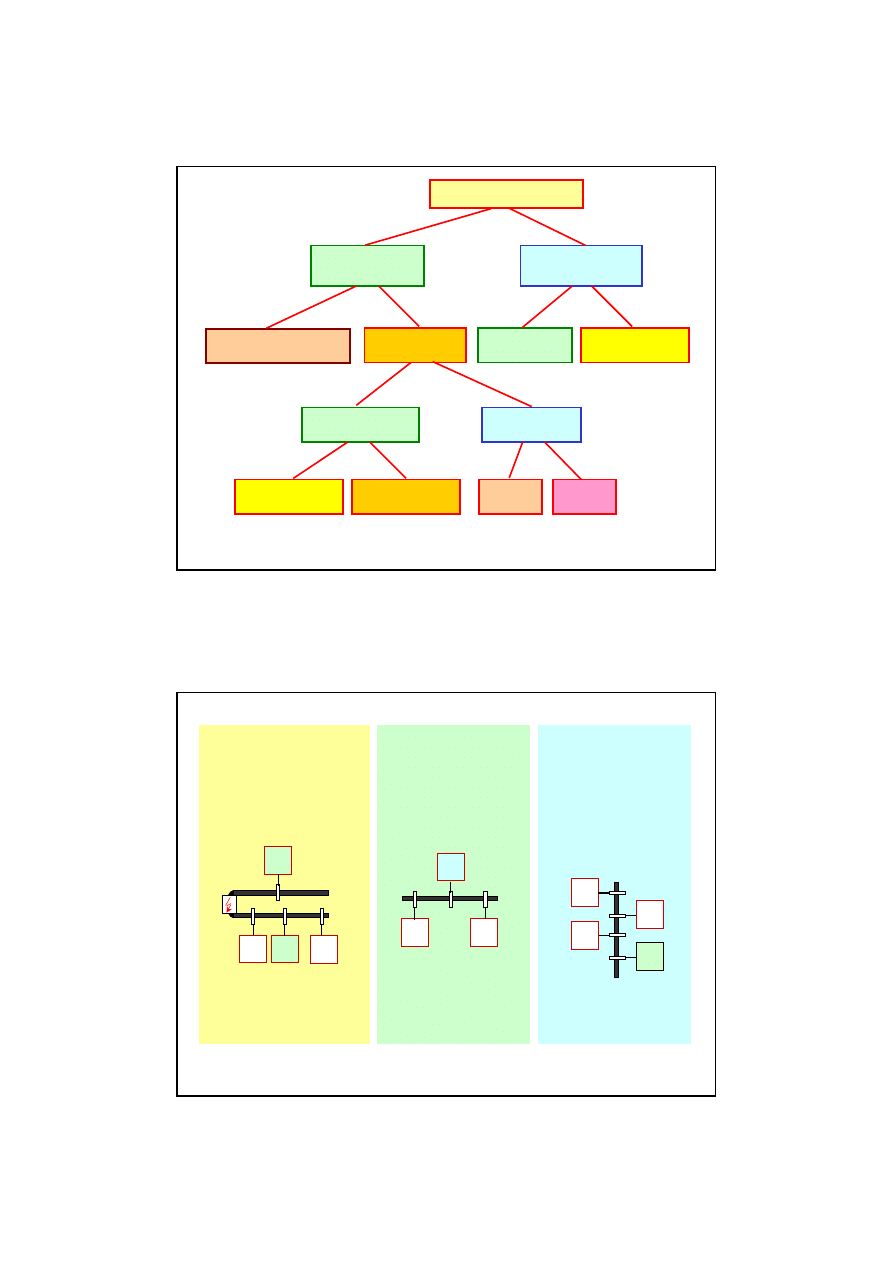
36
Magistrale szeregowe
Magistrale szeregowe
Multipleksowanie
w czasie
Multipleksowanie
cz
ę
stotliwo
ś
ciowe
Transmisja synchroniczna
z centraln
ą
kontrol
ą
Transmisja
asynchroniczna
Jeden uczestnik
na kanał
Wielu uczestników
na kanał
Kontrolowany dost
ę
p
do magistrali
Losowy dost
ę
p
do magistrali
Centralny przydział
magistrali
Rozproszony
przydział magistrali
CSMA/CD
CSMA/CA
Metoda z wykrywaniem kolizji CSMA/CD (ang. Carrier Sense Multiple Access with Collision Detection) i metoda z unikaniem
kolizji CSMA/CA (ang. Carrier Sense Multiple Access with Collision Avoid).
Metody dost
ę
pu do magistrali
Sieciowe systemy komunikacyjne - dost
ę
p do
magistrali
Dost
ę
p losowy:
Dost
ę
p losowy:
CSMA
CSMA: ka
ż
da stacja
mo
ż
e w ka
ż
dej chwili
przesyła
ć
informacj
ę
, a
w przypadku kolizji
nast
ę
puje powtórzenie.
Master
Master
/
/
Slave
Slave
:
:
Master
Master
okre
ś
la, która
okre
ś
la, która
stacja mo
ż
e si
ę
stacja mo
ż
e si
ę
komunikowa
ć
.
komunikowa
ć
.
Kontrolowany
Kontrolowany
rozproszony dost
ę
p
rozproszony dost
ę
p
do magistrali:
do magistrali:
Zasada
Zasada
token
token
’a
’a
:
:
tylko
tylko
stacja maj
ą
ca
stacja maj
ą
ca
token
token
mo
ż
e nadawa
ć
.
mo
ż
e nadawa
ć
.
A
B
C
D
A
B
C
A
D
B
C
Losowa metoda dost
ę
pu do magistrali
z wykrywaniem kolizji CSMA/CD (ang.
Carrier Sense Multiple Access with
Collision
Detection)
i
metoda
z
unikaniem
kolizji
CSMA/CA
(ang.
Carrier Sense Multiple Access with
Collision Avoid).
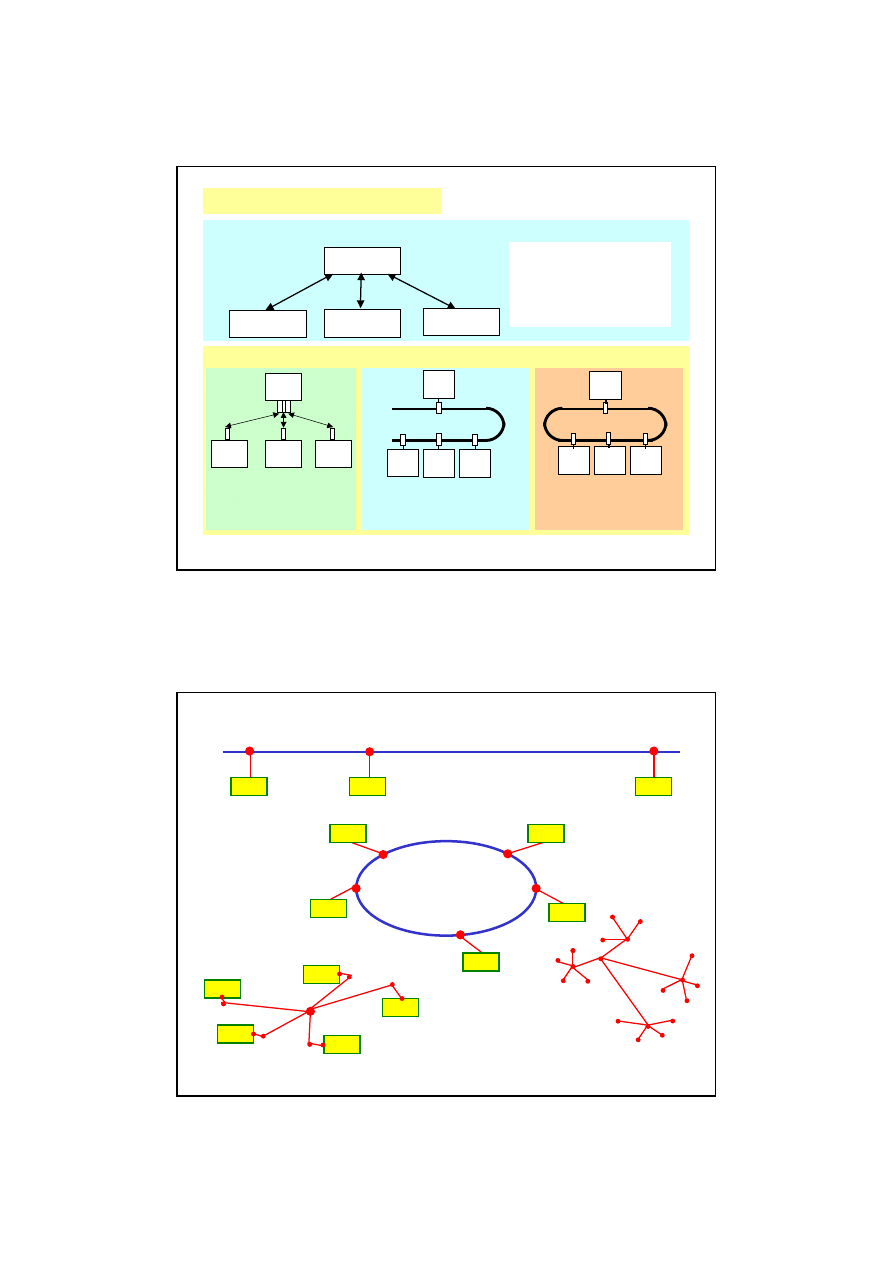
37
Topologia sieci komunikacyjnych
Poł
ą
czenia logiczne i fizyczne
Poł
ą
czenia logiczne i fizyczne
Struktura logiczna:
Struktura logiczna:
A
B
C
D
Przykład:
struktura
struktura
hierarchiczna
hierarchiczna
B, C i D wymieniaj
ą
informacje tylko z A, a nie
miedzy sob
ą
Mo
ż
liwo
ś
ci poł
ą
cze
ń
fizycznych:
Mo
ż
liwo
ś
ci poł
ą
cze
ń
fizycznych:
A
Poł
ą
czenie punkt-punkt:
B, C i D mog
ą
wymienia
ć
dane tylko z A
B
C
D
Magistrala linowa:
B, C i D mog
ą
wymienia
ć
dane A i mi
ę
dzy sob
ą
Magistrala pier
ś
cieniowa:
Poł
ą
czenia jak w magistrali
liniowej, przy awarii jednej ze
stacji pier
ś
cie
ń
jest przerwany.
A
B
C
D
A
B
C
D
Topologie sieci komunikacyjnych
Szyna (ang. Bus)
Pier
ś
cie
ń
(ang. Ring)
. . . . . . . . . . . . . . . . . .
Gwiazda (ang. Stern)
Stokrotka
(ang. Daisy)
38
Sterowanie dost
ę
pem do medium transmisyjnego
Kto i kiedy ma mo
ż
liwo
ść
transmisji?
Rozwiązanie scentralizowane:
Rozwiązanie scentralizowane: Polling
Rozwiązania rozproszone
Rozwiązania rozproszone (zdecentralizowane):
• oparte na token’ie: zapewnione Fairness, dalece deterministyczne
przebiegi czasowe,
• zdefiniowane Slot’y dla poszczególnych uczestników (TDMA
-
ang. Time Division Multiple Access):
- zapewniony Fairness, deterministyczne przebiegi czasowe,
• z rywalizacją (np. CSMA/CD – ang. Carrier Sense Multiple Access/
Collision Detection):
- oczekiwanie na ciszę (na magistrali),
- transmitowanie, a przez odbiór sprawdzanie kolizji,
- w przypadku kolizji przerwanie i losowe oczekiwanie w kolejce,
- stochastyczne uprawnienia (ang. Fairness), średnio małe
opóźnienia (ang. Latens),
• na bazie czasów oczekiwania.
Model odniesienia ISO/OSI
Model odniesienia ISO/OSI (ang. International Standard Organisation/
Open System Interconnection)
Warstwa 1
Warstwa 2
Warstwa 3
Warstwa 4
Warstwa 5
Warstwa 6
Warstwa 7
W
a
rs
tw
y
z
o
ri
e
n
to
w
a
n
e
n
a
tr
a
n
s
p
o
rt
W
a
rs
tw
y
z
o
ri
e
n
to
w
a
n
e
n
a
a
p
li
k
a
c
j
ę
1011111010010110
Start Adres
A
B
%%I%%
Zobrazowanie
Transmisja bitów
Zabezpiecze
ń
Transmisji
Transportowa
Sesji
Zobrazowania
Aplikacji
Wytworzenie sygnałów elektrycznych
Sterowanie dost
ę
pem, poł
ą
czenia
systemowe, tworzenie sumy kontrolnej,
wysyłanie i odbiór pakietów danych
Poszukiwanie dróg transmisji,
ł
ą
czenie systemów ko
ń
cowych
Przetwarzanie nazw, adresy
sieciowe, ł
ą
czenie uczestników
Tworzenie poł
ą
cze
ń
jako
jednostek wirtualnych
Dopasowanie formatów
danych
Interfejs aplikacji
Przetwarzanie informacji
Model warstwowy ISO/OSI
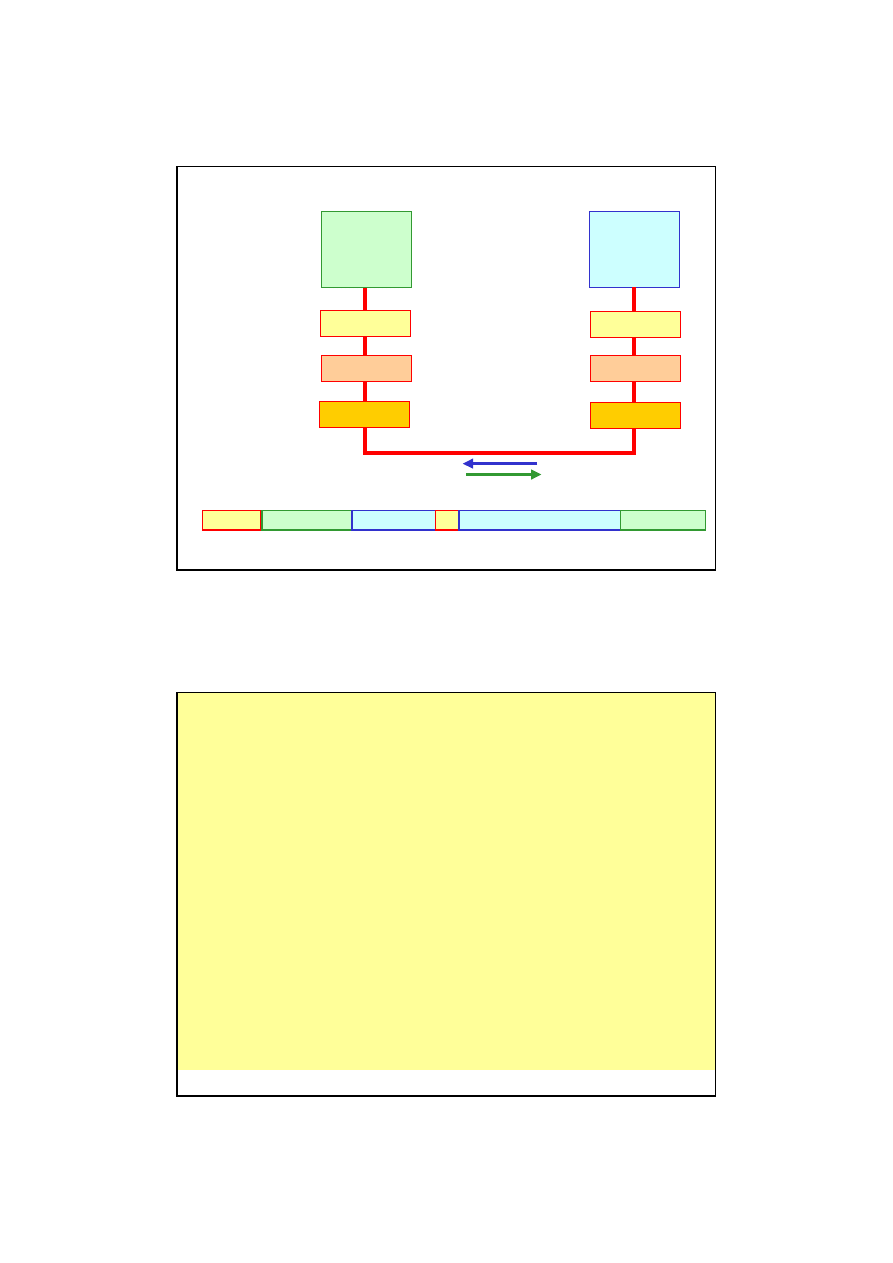
39
Budowa (struktura) pakietu IP (Internet Protocol)
Preambuła
Adres docelowy
Adres nadawcy
Typ
Dane
Suma kontrolna
4 byte 6 byte 6 byte 2 byte 32 byte do 1500 byte 4 byte
Aplikacja I
Dane
Server
Protokół http
Aplikacja II
Dane
Client
Protokół http
TCP
IP
ETH
TCP
IP
ETH
Zapytanie
Usługa
(1) Warstwa fizyczna
(1) Warstwa fizyczna
Gniazda/ wtyki, kabel, elektronika
(2) Warstwa poł
ą
cze
ń
(2) Warstwa poł
ą
cze
ń
Adres MAC Adres MAC
(3) Warstwa sieci
(3) Warstwa sieci
10.1.0.19
10.1.10.27
(4) Warstwa transportowa
(4) Warstwa transportowa
Port 80
Port 123
(5) Warstwa sesji
(5) Warstwa sesji
(6) Warstwa zobrazowania
(6) Warstwa zobrazowania
(7) Warstwa aplikacji
(7) Warstwa aplikacji
Otrzymywanie danych
Konwersja danych z
formatu aplikacji do
formatu transmisji
Transport pakietów
w sieci z
automatycznym
wyszukiwaniem celu
(odbiorcy)
Przetworzenie
pakietów w sygnały
elektryczne (lub
optyczne)
Publiczne sieci komunikacyjne
Analogowa telekomunikacja przenosi głos (mow
ę
) przez analogowe sygnały o napi
ę
ciu przemiennym. Zera i
jedynki cyfrowego pakietu danych s
ą
transmitowane przez dwa zmienne sygnały napi
ę
ciowe o ró
ż
nych
cz
ę
stotliwo
ś
ciach.
Natomiast w sieci ISDN (ang. Integrated Service Data Network) s
ą
transmitowane tylko dane cyfrowe. Dzi
ę
ki temu
uzyskuje si
ę
zwi
ę
kszenie szybko
ś
ci transmisji (technologia DSL).
Sieci GSM (ang. Global System for Mobile Communication) s
ą
wykorzystywane przede wszystkim w telefonach
komórkowych i palmtopach. S
ą
w nich tak
ż
e transmitowane dane cyfrowe. Przesyłanie SMS’ów, obrazów i dost
ę
p
do Internetu otwiera tak
ż
e nowe mo
ż
liwo
ś
ci zastosowania tych sieci w systemach automatyzacji.
System GPRS (ang. General Packet Radio Service) jest metod
ą
transmisji, w której cz
ę
stotliwo
ś
ci radiowe GSM
s
ą
powi
ą
zane i w ten sposób uzyskuje si
ę
wi
ę
ksz
ą
przepustowo
ść
pakietów danych IP (ang. Internet Protocol).
Dalsz
ą
usług
ą
jest CSD (ang. Circuit Switched Data).
Komunikacja przez UMTS (ang. Universal Mobile Telecommunictions System) lub Wimax (ang. Worldwide
Interoperability Microwave Access) jest jeszcze w fazie rozwoju. B
ę
dzie w niej mo
ż
liwa transmisja znacznie
wi
ę
kszych ilo
ś
ci danych. Ponadto du
żą
rol
ę
b
ę
d
ą
odgrywały aplikacje interaktywne.
Dostawcy Internetu (Internet-Provider) wzgl. firmy telefoniczne oferuj
ą
równie
ż
tzw. usługi US (ang. Unified
Messaging), których zastosowanie w sieciach przemysłowych tak
ż
e nale
ż
y bra
ć
pod uwag
ę
. Ten rodzaj usługi
umo
ż
liwia przesyłanie informacji w sposób wybieralny przez ró
ż
ne kanały, w zale
ż
no
ś
ci od tego w jaki sposób
dost
ę
pny jest odbiorca. Typowymi takimi usługami s
ą
:
• fax,
• pager,
• SMS (ang. Short Messaging System),
• MMS (ang. Multimedia Messaging System),
• Voice-Message,
• SMTP (e-mail).
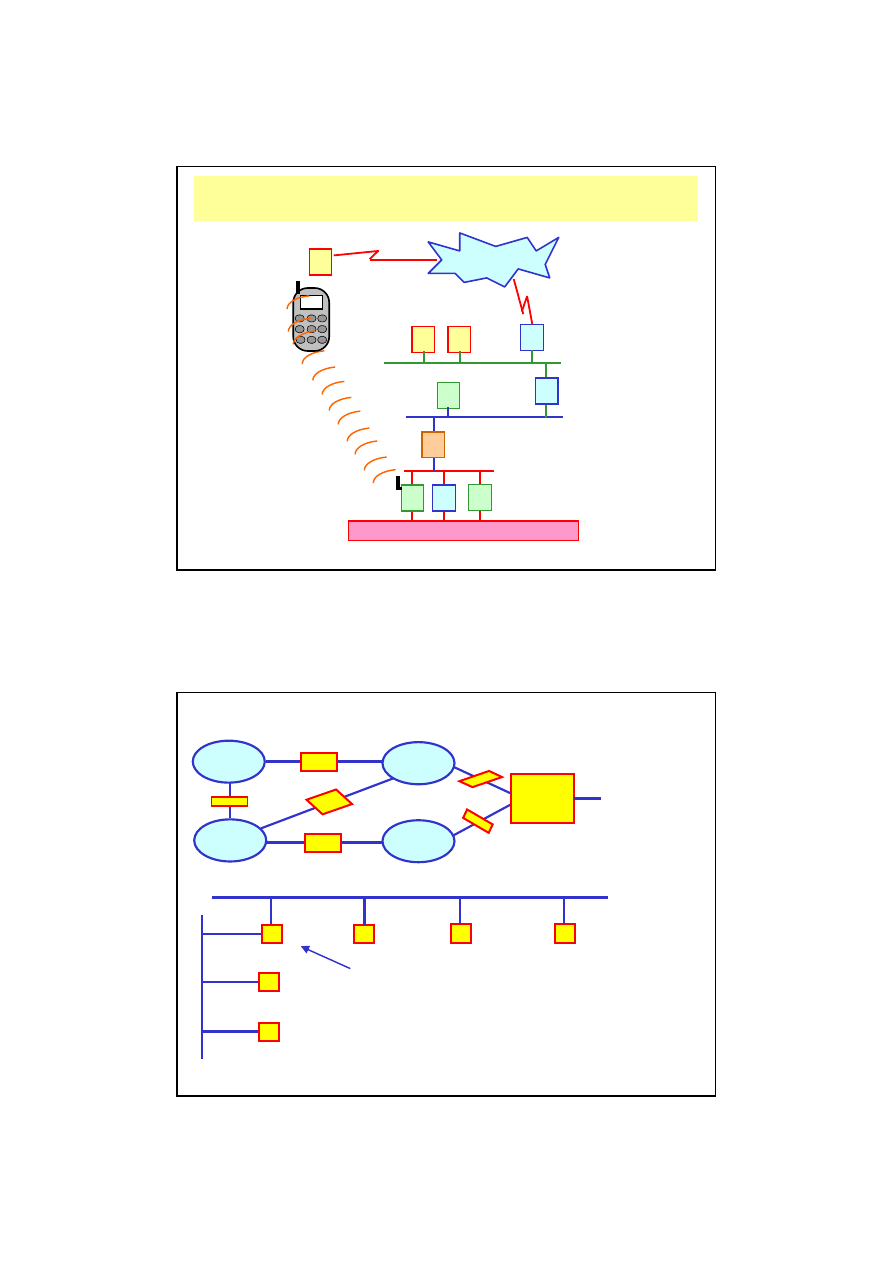
40
Urz
ą
dzenie sieciowe w systemie automatyzacji, w przypadku zakłóce
ń
w jego pracy, mo
ż
e przesła
ć
informacj
ę
, któr
ą
odbiorca mo
ż
e odebra
ć
przez jeden z wielu mo
ż
liwych kanałów i podj
ąć
odpowiednie
działanie, a nawet w niektórych przypadkach rozwi
ą
za
ć
problem przez te kanały.
PC
PC
Fieldbus
Sensor
/
Aktuator
Obiekt sterowania
Obiekt sterowania
Sterownik
LAN: segment sterowania
LAN: segment zarz
ą
dzania
Router
Bridge
Stacja
kierowania
PC
Internet
Internet
Firma
Firma
serwisowa
serwisowa
ISDN
ISDN
Zdalny dost
ę
p do systemów automatyzacji
Interoperacyjno
ść
(ang. Interoperability) sieci
Sie
ć
rozległa
WAN
WAN (ang.
Wide Area
Network)
Repeater
Bridge’s
Gateway
Podsie
ć
41
Repeater
Repeater:
– nie ma zmiany protokołów i szybko
ś
ci transmisji.
Bridge
Bridge:
– nie ma zmiany protokołów, nie ma fragmentyzacji,
– zmiana szybko
ś
ci transmisji i metody dost
ę
pu.
Gateway
Gateway:
– zmiana protokołu, szybko
ś
ci transmisji, fragmentyzacji i metod dost
ę
pu,
– brak routing’u adresów.
Router
Router:
– zmiana protokołu, szybko
ś
ci transmisji, fragmentyzacji i metod dost
ę
pu,
– routing adresów.
Switche’
Switche’s:
– przeł
ą
czanie bezpo
ś
rednich poł
ą
cze
ń
pomi
ę
dzy portami wewn
ą
trz urz
ą
dzenia,
– mo
ż
na pracowa
ć
na ró
ż
nych poziomach stosu protokołów,
– mo
ż
na realizowa
ć
funkcjonalno
ść
repeter’ów, bridge’s, gateway’s i router’ów.
Metody transmisji
Metody transmisji:
– przeł
ą
czanie pakietów (ang. packet switching),
– przeł
ą
czanie obwodów (ang. circuit switching).
Interoperacyjno
ść
(ang. Interoperability) sieci
Zastosowanie sieci komunikacyjnych wynika ze wzrostu układów elektronicznych
w samochodach:
Elektronika zamiast mechaniki:
Elektronika zamiast mechaniki:
• podnoszenie szyb, centralny zamek,
Elektroniczne urz
ą
dzania steruj
ą
ce:
Elektroniczne urz
ą
dzania steruj
ą
ce:
• silnik, skrzynia biegów, ABS, ESP, Airbag,
Składniki multimedialne:
Składniki multimedialne:
• system nawigacyjny, odtwarzacz CD,
• Internet.
Sieciowe systemy komunikacyjne umo
ż
liwiaj
ą
:
redukcj
ę
okablowania
→
→
→
→
maleje cena i ci
ęż
ar,
rozszerzenie zdolno
ś
ci komunikacyjnych,
kontrol
ę
dzi
ę
ki składnikom diagnostycznym,
zapewnienie bezpiecze
ń
stwa dzi
ę
ki redundancji,
modularyzacj
ę
.
Zastosowanie sieciowych systemów
komunikacyjnych w samochodach
42
Rozwój i zastosowanie sieciowych systemów komunikacyjnych w samochodach
przynosi nast
ę
puj
ą
ce korzy
ś
ci:
zapewnienie komunikacji pomi
ę
dzy ró
ż
nymi modułami i urz
ą
dzeniami
sterowniczymi z mo
ż
liwie małymi nakładami na okablowanie,
prosta struktura magistrali, tzn. ka
ż
de urz
ą
dzenie powinno by
ć
tylko raz
przył
ą
czone,
zwi
ę
kszenie odporno
ś
ci na awarie i zakłócenia dzi
ę
ki redundantnym
przewodom,
zastosowanie prostych narz
ę
dzi diagnostycznych dzi
ę
ki implementacji pami
ę
ci
bł
ę
dów w urz
ą
dzeniu steruj
ą
cym,
oszcz
ę
dno
ść
na kablach i tym samym równie
ż
kosztach oraz masie
samochodu,
proste Upgrade nowego oprogramowania, zarówno podczas monta
ż
u jak i
podczas piel
ę
gnacji,
przekształcenie samochodu w „Mobile Office“, integracja systemów
nawigacyjnych, telefonu itp.,
prosta integracja innych układów elektronicznych (np. asystent kierowcy).
Przyczyny rozwoju sieci komunikacyjnych w samochodach
Sieciowe systemy komunikacyjne w samochodach s
ą
stosowane w celu redukcji nakładów zwi
ą
zanych z
okablowaniem, co stanowi istotny czynnik minimalizacji kosztów wytwarzania i zmniejszenia masy
samochodów. Technicznymi kryteriami doboru sieciowych systemów komunikacyjnych dla
samochodów s
ą
:
szeroko
ść
pasma przenoszenia (transmisji),
odporno
ść
na zakłócenia,
zdolno
ść
do pracy w czasie rzeczywistym,
liczba adresowanych w
ę
złów.
Rodzaj zastosowania sieci okre
ś
la wymagan
ą
szeroko
ść
pasma. Do transmisji komend dla nastawienia
klap w instalacjach klimatyzacyjnych wymagana jest mała szeroko
ść
pasma, ale liczba adresowanych
silników mo
ż
e by
ć
stosunkowo du
ż
a. Wymagania dotycz
ą
ce odporno
ś
ci sieci na zakłócenia zale
żą
od
stopnia istotno
ś
ci bezpiecze
ń
stwa sterowanych jednostek. I tak dla jednostek, które słu
żą
wył
ą
cznie
funkcjom komfortu stawiane s
ą
mniejsze wymagania ni
ż
jednostkom, które maj
ą
bezpo
ś
redni wpływ na
przebieg jazdy, takich jak ABS lub układy zapobiegaj
ą
ce po
ś
lizgom. Najwa
ż
niejszymi kryteriami
ekonomicznymi w doborze sieciowych systemów komunikacyjnych dla samochodów s
ą
:
koszty przewodów,
koszty składników.
Ponadto istotnymi czynnikami w zastosowaniu sieciowych systemów komunikacyjnych w samochodach
s
ą
:
kompatybilno
ść
elektromagnetyczna (EMC),
promieniowanie elektromagnetyczne,
tolerancja napi
ę
cia zasilania,
topologia okablowania.
Czynniki doboru sieci komunikacyjnych w samochodach
43
Obecnie produkowane samochody
ś
redniej i wy
ż
szej klasy maj
ą
od 60 do 100
sterowanych elektronicznych urz
ą
dze
ń
ECU (ang. Electronic Control Units).
Klasyfikacja ró
ż
nych obszarów:
Sieciowe systemy komunikacyjne w samochodach
Nawigacja,
odtwarzacz CD, ...
Sterowanie silnikiem,
sterowanie skrzyni
ą
biegów, ABS, ...
Armatura, sterowanie
klimatyzacj
ą
, ...
Ś
wiatła
hamowania,
kierunkowskazy, ...
> 1 Mbit/s
> 250 kbit/s
40 kbit/s
10 kbit/s
Cz
ę
ste długie
informacje
Cz
ę
ste krótkie
informacje
Wiele/ krótkie
informacje
Mało/ krótkie
informacje
Multimedia
Krytyczne systemy
czasu rzeczywistego
Armatura
Elektronika z
chassis
Klasa D
Klasa C
Klasa B
Klasa A
Rozpowszechnione w samochodach sieciowe systemy komunikacyjne:
LIN (ang. Local Interconnect Network),
CAN (ang. Controller Area Network),
FlexRay,
MOST (ang. Media Oriented Systems Transport).
Przykład zastosowania sieci komunikacyjnych (magistrali
szeregowych) w nowoczesnych samochodach
Silnik
ABS
Przekła-
dnia
Kombi
Drzwi
Drzwi
Dach
Siedze-
nie
Siedze-
nie
Klimaty-
zacja
Kompu-
ter
Gateway
Sensor
Sensor
Aktuator
ECU1
ECU1
Odtwa-
rzacz CD
Telefon
Tuner
TV
Nawi-
gacja
LIN
LIN
CAN
CAN
High
High
-
-
Speed
Speed
CAN
CAN
Low
Low
-
-
Speed
Speed
FlexRay
FlexRay
MOST
MOST
Multimedia
Sensor/ aktuator
Komfort
Nap
ę
d/ zespoły jazdy
ECU (ang. Electronic Control Units)
44
Nowoczesne samochody zawieraj
ą
wiele ró
ż
norodnych systemów komunikacyjnych (magistral szeregowych).
Najbardziej rozpowszechnionym sieciowym systemem komunikacyjnym w samochodach jest CAN (ang.
Controller Area Network), który w 1994 r. został uznany jako standard mi
ę
dzynarodowy. Przy czym
rozró
ż
nia si
ę
:
wolny system CAN (CAN-Low-Speed) do poł
ą
czenia w sie
ć
urz
ą
dze
ń
steruj
ą
cych komfortem z
maksymaln
ą
szybko
ś
ci
ą
transmisji 125 kbit/s oraz
szybki system CAN (CAN-High-Speed) do poł
ą
czenia w sie
ć
urz
ą
dze
ń
steruj
ą
cych nap
ę
du i
mechanizmów jazdy o maksymalnej szybko
ś
ci transmisji 1 Mbit/s.
LIN (ang. Local Interconnected Network) jest stosowany do taniej i prostej transmisji danych w obszarze
sensorów/ aktuatorów. Szybko
ść
transmisji jest ograniczona do 20 kbit/s, co jednak zupełnie wystarcza do
transmisji niekrytycznych czasowo sygnałów sensorów i aktuatorów.
Poniewa
ż
CAN, jako sterowany zdarzeniami szeregowy system magistralowy, przy rosn
ą
cym obci
ąż
eniu
magistrali mo
ż
e w coraz mniejszym stopniu zapewni
ć
prac
ę
w czasie rzeczywistym, to dla aplikacji
krytycznych czasowo w samochodach konieczny jest taki sieciowy system komunikacyjny, który niezale
ż
nie
od obci
ąż
enia magistrali zapewnia twardy czas rzeczywisty (ang. Hard Real Time). W systemach
krytycznych czasowo chodzi najcz
ęś
ciej równie
ż
o układy istotne dla bezpiecze
ń
stwa. Rozwi
ą
zaniem tego
problemu jest zastosowanie systemu FlexRay, który ma maksymaln
ą
szybko
ść
transmisji 20 Mbit/s i
zapewnia deterministyczne przebiegi czasowe. Drugi kanał komunikacyjny umo
ż
liwia redundantn
ą
transmisj
ę
danych. W tym przypadku, gdy dane zostan
ą
zakłócone w jednym kanale, to zawsze jest
jeszcze dla nich do dyspozycji drugi kanał.
Natomiast urz
ą
dzenia informacyjne, takie jak nawigacja, radio i telefon, wymagaj
ą
stosunkowo wysokiej
szeroko
ś
ci pasma, poniewa
ż
transmituj
ą
one nie tylko sygnały steruj
ą
ce, ale tak
ż
e sygnały wideo i audio.
Do poł
ą
czenia w sie
ć
multimediów w samochodach stosowany jest system MOST (ang. Media Oriented
System Transport). MOST daje do dyspozycji stosunkowo du
żą
szeroko
ść
pasma transmisji: dla
cz
ę
stotliwo
ś
ci próbkowania 48 kHz jest to ok. 23 Mbit/s dla transmisji strumienia bitów i 768 kbit/s do
transmisji sygnałów steruj
ą
cych.
Sieciowe systemy komunikacyjne w samochodach
linia, gwiazda
linia
linia, gwiazda
Topologia
skr
ę
tka dwuparowa,
ś
wiatłowód z tworzyw
sztucznych
Single Wire
skr
ę
tka dwuparowa
(ang. Twisted Paar)
Medium transmisyjne
254
8
8
Max liczba byte’ów danych/
ramek (ang. Frame)
20 kbit/s
20 kbit/s
1 Mbit/s
Max. szybko
ść
transmisji
informacje
informacje
informacje
Adresowanie
kontrolowany TDMA
(ang. Time Division
Multiple Access)
kontrolowany
(delegowany token)
losowy CSMA/CA
(ang. Carrier Sense
Multiple Access/ with
Collision Avoidance)
Dost
ę
p do magistrali
Multi-Master
Master-Slave
Multi-Master
Architektura
deterministyczne
deterministyczne
nie deterministyczne
Przebiegi czasowe
czas
czas
zdarzenia
Sterowanie
FlexRay
FlexRay
LIN
LIN
CAN
CAN
Sie
ć
Aspekt
Cechy sieciowych systemów komunikacyjnych
stosowanych w samochodach
45
Rozwój zastosowania sieciowych systemów
komunikacyjnych w samochodach
2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 Rok
%
300
200
100
0
Pozostałe
Firmowe (prod. samoch.)
„Bezpiecze
ń
stwa” (ł
ą
cznie z FlexRay)
LIN
J1850
CAN
Znaczenie sieci CAN od 2006 r. ulega zmniejszeniu. Natomiast przewidywany jest znaczny
wzrost zastosowania sieci LIN i FlexRay.
Wyszukiwarka
Podobne podstrony:
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 5 (2)
MTR 2009 Wstep do mechatr cz 7 (2)
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 6
MTR 2009 Wstep do mechatr cz 2 (2)
MTR 2009 Wstep do mechatr cz 4 (2)
MTR 2009 Wstep do mechatr cz 8 Nieznany
MTR 2009 Wstep do mechatr cz 3 (2)
MTR 2009 Wstep do mechatr cz 2
MTR 2009 Wstep do mechatr cz 5
MTR 2009 Wstep do mechatr cz 1
MTR 2009 Wstep do mechatr cz 3
MTR 2009 Wstep do mechatr cz 7
MTR 2009 Wstep do mechatr cz 8
MTR 2011 Wstep do mechatr cz 8
MTR 2011 Wstep do mechatr cz 1
Wstęp do MATLABA cz 1
więcej podobnych podstron