„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Jadwiga Łoin
Dobieranie
maszyn
i
urządzeń
przemysłowych
oraz transportowych 812[03].Z1.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Ewa Pogorzelska
mgr inż. Marian Cymerys
Opracowanie redakcyjne:
mgr inż. Jadwiga Łoin
Konsultacja:
dr inż. Bożena Zając
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 812[03].Z1.01
„Dobieranie maszyn i urządzeń przemysłowych oraz transportowych”, zawartego
w programie nauczania dla zawodu operator maszyn i urządzeń odlewniczych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Charakterystyka maszyn i urządzeń przemysłowych
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
11
4.1.3. Ćwiczenia
11
4.1.4. Sprawdzian postępów
13
4.2. Maszyny i urządzenia hydrauliczne i pneumatyczne
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
22
4.2.3. Ćwiczenia
22
4.2.4. Sprawdzian postępów
26
4.3. Urządzenia transportu wewnętrznego
27
4.3.1. Materiał nauczania
27
4.3.2. Pytania sprawdzające
41
4.3.3. Ćwiczenia
41
4.3.4. Sprawdzian postępów
44
5. Sprawdzian osiągnięć
45
6. Literatura
50

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy dotyczącej maszyn i urządzeń
przemysłowych oraz transportowych.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
–
materiał nauczania – wiadomości teoretyczne niezbędne do osiągnięcia założonych celów
kształcenia i opanowania umiejętności zawartych w jednostce modułowej,
–
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
–
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
–
sprawdzian postępów,
–
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
–
literaturę uzupełniającą.
Miejsce jednostki modułowej w strukturze modułu 812[03].Z1 „Eksploatacja maszyn
i urządzeń odlewniczych” jest wyeksponowane na schemacie zamieszczonym na stronie 4.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp
i instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Wiadomości
dotyczące przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska znajdziesz w jednostce modułowej 812[03].O1.01 „Przestrzeganie
wymagań bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej i ochrony środowiska”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
812[03].Z1
Eksploatacja maszyn
i urządzeń odlewniczych
812[03].Z1.01
Dobieranie maszyn
i urządzeń przemysłowych oraz
transportowych
812[03].Z1.02
Użytkowanie
i obsługiwanie maszyn
i urządzeń przemysłowych oraz
transportowych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony środowiska i ochrony
przeciwpożarowej podczas wykonywania pracy,
−
organizować stanowisko pracy zgodnie z wymogami ergonomii,
−
czytać rysunki konstrukcyjne i technologiczne, dokumentację techniczno-ruchową oraz
instrukcje obsługi maszyn i urządzeń,
−
określać parametry maszyn i urządzeń elektrycznych na podstawie tabliczki znamionowej
oraz rozróżniać na schematach elementy obwodu elektrycznego,
−
rozróżniać podstawowe elementy elektroniczne oraz podstawowe elementy układów
sterowania,
−
rozróżniać elementy układów automatyki przemysłowej oraz interpretować proste
schematy układów automatycznej regulacji,
−
korzystać z dokumentacji technicznej, PN, katalogów,
−
stosować i zamieniać jednostki układu SI,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3.
CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
–
scharakteryzować proces produkcyjny,
–
scharakteryzować proces technologiczny,
–
dokonać klasyfikacji maszyn i urządzeń przemysłowych,
–
scharakteryzować zespół, podzespół i mechanizm maszyny,
–
wyjaśnić budowę i zasadę działania układów pneumatycznych i hydraulicznych,
–
rozróżnić elementy napędów hydraulicznych i pneumatycznych,
–
określić przeznaczenie elementów napędów hydraulicznych i pneumatycznych,
–
odczytać schematy układów pneumatycznych i hydraulicznych,
–
sklasyfikować i scharakteryzować sprężarki,
–
sklasyfikować wentylatory,
–
wyjaśnić budowę wentylatorów osiowych i promieniowych,
–
określić parametry wentylatora,
–
określić wykorzystanie sprężarek i wentylatorów w procesach odlewniczych,
–
scharakteryzować podstawowe typy magazynów,
–
sklasyfikować urządzenia do transportu wewnętrznego,
–
sklasyfikować dźwignice,
–
określić cechy dźwignic według PN,
–
rozróżnić elementy dźwignic,
–
sklasyfikować dźwigniki i określić ich zastosowanie,
–
rozróżnić rodzaje cięgników i wskazać zastosowanie,
–
sklasyfikować suwnice według PN,
–
rozróżnić elementy i podstawowe zespoły suwnic,
–
sklasyfikować przenośniki, objaśnić ich budowę i zastosowanie,
–
scharakteryzować uprawnienia zawodowe do obsługi urządzeń transportu wewnętrznego,
–
wskazać instytucje nadzorujące prace urządzeń transportu wewnętrznego,
–
skorzystać z dokumentacji technicznej, Polskich Norm oraz katalogów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Charakterystyka maszyn i urządzeń przemysłowych
4.1.1. Materiał nauczania
Maszyna przemysłowa jest to zespół mechanizmów zdolnych do wykonywania pracy
użytecznej. Maszyny przemysłowe dzielą się na:
−
maszyny napędowe: silniki, przetworniki,
−
maszyny robocze.
Wybrane przykłady maszyn przemysłowych:
−
maszyny robocze:
−
przeróbcze,
−
transportowe.
−
maszyny elektryczne,
−
maszyny hydrauliczne,
−
maszyny pneumatyczne,
−
silniki spalinowe,
−
maszyny parowe i turbiny parowe,
−
maszyny do robót ziemnych.
Urządzenie przemysłowe jest to przedmiot umożliwiający wykonanie określonego
procesu, często stanowiący zespół połączonych ze sobą części stanowiących funkcjonalną
całość, służący do określonych celów, np. do przetwarzania energii, wykonywania określonej
pracy mechanicznej, przetwarzania informacji, mający określoną formę budowy w zależności
od spełniających parametrów pracy i celu przeznaczenia. Urządzenia przemysłowe dzielą się
na:
−
maszyny,
−
sprzęt,
−
osprzęt,
−
narzędzia.
Wybrane przykłady urządzeń przemysłowych:
−
urządzenia technologiczne: obrabiarki, młoty, prasy, formierki, maszyny, wytłaczarki,
−
urządzenia cieplne: sprężarki, chłodziarki, pompy,
−
urządzenia przetwarzające – przetworniki,
−
urządzenia dźwigowo-transportowe,
−
urządzenia elektryczne i elektroniczne,
−
urządzenia pomiarowe.
Mechanizm jest to układ powiązanych i współpracujących ze sobą części maszyn
mogących wykonywać określone ruchy w wyniku pobranej energii mechanicznej. W ujęciu
teorii mechanizmów, mechanizm jest to najmniejszy, samodzielny zespół ruchowy (łańcuch
kinematyczny z jednym członem nieruchomym), część maszyny zdolna do przekazywania
ruchu. Mechanizmy służą do przeniesienia określonego ruchu, zwykle mającego charakter
okresowy. W czasie przeniesienia ruchu zwykle ulegają zmianie parametry ruchu: prędkość
i siła lub moment siły. Każdy mechanizm składa się z następujących elementów:
−
baza (lub ostoja), element nieruchomy, stanowiący część mechanizmu, względem
którego odnosi się ruchy pozostałych elementów,
−
człon czynny, bezpośrednio napędza mechanizm, pobierając energię z zewnątrz,
−
człon bierny, odbiera energię i przekazuje ją na zewnątrz mechanizmu,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
−
człony pośredniczące, elementy mechanizmu pośredniczące w przekazaniu ruchu
z członu czynnego na bierny.
Elementy czynny, bierny i pośredniczące połączone są ze sobą za pomocą przegubów
zwanych także parami kinematycznymi. Mechanizm składa się z jednego lub więcej
łańcuchów kinematycznych.
Człony mogą mieć różne formy i spełniać różne funkcje, zwykle są to:
−
człony sztywne: popychacz, koło, wahacz, dźwignia,
−
człony elastyczne: lina, łańcuch, pas,
−
człony podatne: sprężyna, amortyzator,
−
człony pneumatyczne i hydrauliczne.
Przykładowe rodzaje mechanizmów stosowanych w maszynach przemysłowych:
−
dźwigniowy,
−
jarzmowy,
−
korbowy,
−
zapadkowy,
−
krzywkowy,
−
maltański,
−
różnicowy,
−
prowadzenia,
−
kierowniczy,
−
zwrotniczy,
−
sterowania.
Zespół elementów konstrukcyjnych jest to część maszyny, urządzenia lub mechanizmu
w postaci zwartej grupy elementów konstrukcyjnych, spełniających określone zadania.
W zależności od liczby połączeń rozróżnia się zespoły:
−
proste, zawierające połączenie jednego rodzaju, np. śrubowe,
−
złożone, zawierające połączenia kilku rodzajów, np. śrubowe i wpustowe, itp.,
−
jednozłączne, zawierające jedno połączenie, które zawsze jest połączeniem prostym,
−
wielozłączne, zawierające kilka połączeń prostych lub złożonych.
W zależności od rodzaju połączeń zespoły elementów konstrukcyjnych mogą być:
−
rozłączne,
−
częściowo rozłączne,
−
nierozłączne, zwane także blokami konstrukcyjnymi.
Pod względem funkcjonalnym w maszynach i urządzeniach przemysłowych wyróżnić
można szereg zespołów, które są przeznaczone do wykonywania określonych funkcji. Do
podstawowych zespołów funkcjonalnych zalicza się:
−
zespoły robocze, które są przeznaczone do wykonywania ruchów podstawowych,
−
zespoły napędowe, którymi są mechanizmy służące do przeniesienia ruchu ze źródła na
zespoły robocze,
−
silniki, które stanowią źródło energii dla zespołów napędowych,
−
korpusy, które stanowią elementy wiążące inne zespoły w jedną całość konstrukcyjną,
−
uchwyty, które są przeznaczone do łączenia narzędzi i przedmiotów poddawanych
obróbce z zespołami roboczymi,
−
elementy i zespoły sterowania, które służą do kierowania pracą maszyn i urządzeń
przemysłowych,
−
mechanizmy nastawcze i pomiarowe, których zadaniem jest ustalenie i pomiar położenia
np. narzędzi względem przedmiotu obrabianego,
−
urządzenia smarujące, chłodzące, itp.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Proces produkcyjny
Proces
technologiczny
Kontrola
Transport
Magazynowanie
Konserwacja
W dużych zespołach można wydzielić zespoły mniejsze, zwane zespołami niższego rzędu
lub podzespołami. W takich przypadkach cały zespół nazywany jest zespołem głównym.
Podstawowym i niepodzielnym składnikiem każdej maszyny i urządzenia są elementy
konstrukcyjne, np.: śruby, kliny, wały, koła zębate itp. wytworzone w procesie
produkcyjnym.
Proces produkcyjny to zespół czynności obejmujący wszystkie fazy procesu
przetwarzania surowców, materiałów i półwyrobów w wyroby. W skład procesu
produkcyjnego wchodzą: procesy technologiczne oraz procesy pomocnicze, np. związane
z przygotowaniem surowca, kontrolą jakości wyrobów, magazynowaniem surowca lub
wyrobów itp. Można wyróżnić następujące procesy produkcyjne:
−
podstawowe, których celem jest wytwarzanie gotowych wyrobów zaliczanych do
produkcji podstawowej przedsiębiorstwa,
−
pomocnicze, których celem jest produkcja pomocnicza, niezbędna do realizacji procesów
podstawowych,
−
obsługi, związane z technicznym przygotowaniem produkcji oraz kontrolą.
Schemat działań wykonywanych w ramach procesu produkcyjnego przedstawia rysunek 1.
Rys. 1. Schemat procesu produkcyjnego
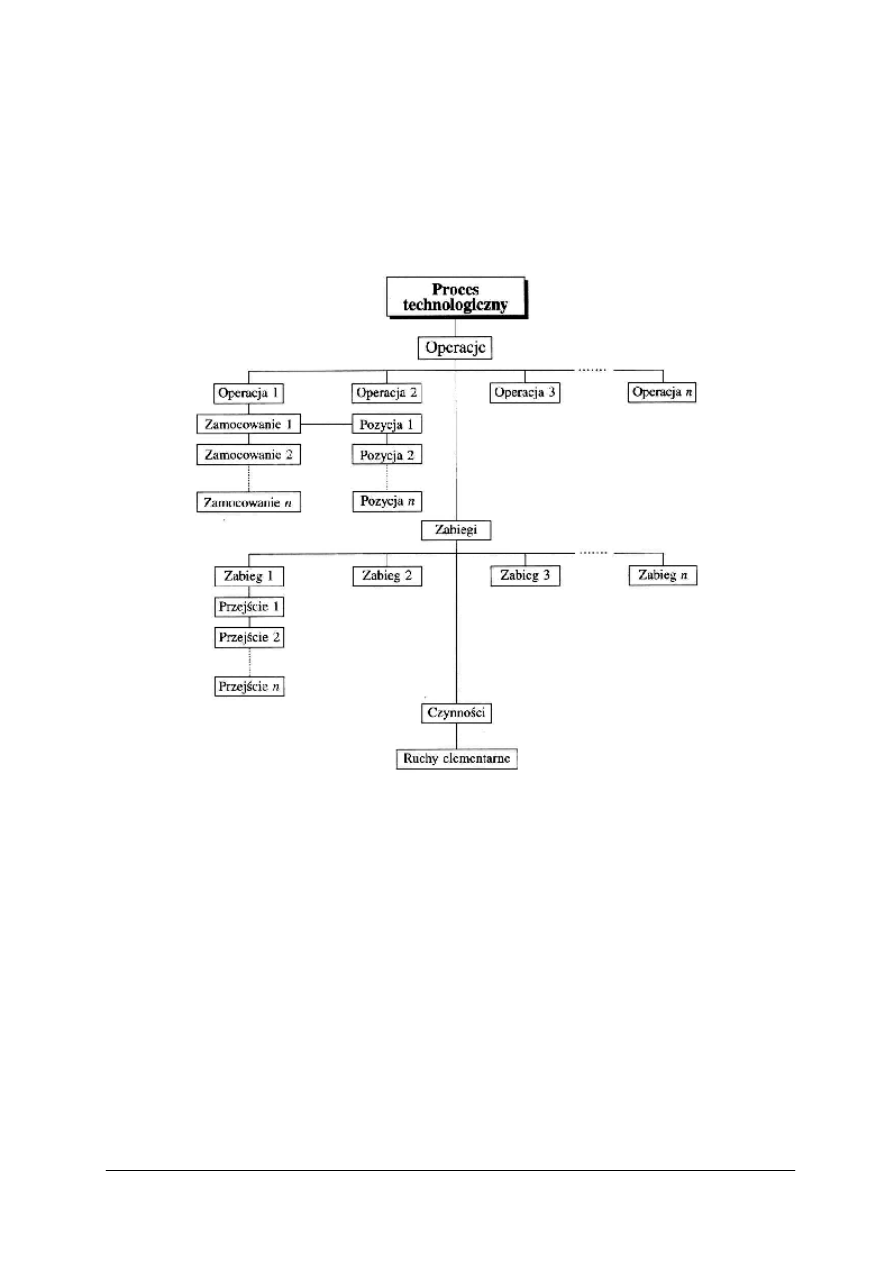
Proces technologiczny jest to podstawowa część procesu produkcyjnego obejmująca
kolejne etapy wytwarzania wyrobu, w trakcie których następuje zmiana własności fizycznych
i chemicznych, struktury, kształtu, wymiarów itp. Proces technologiczny dzieli się na
operacje technologiczne.
Operacja technologiczna to zamknięta część procesu technologicznego wykonywana
przez jednego pracownika lub grupę pracowników na jednym stanowisku pracy i bez przerwy
na inną pracę. Operacje dzieli się na zabiegi.
Zabieg jest częścią operacji technologicznej wykonanej bez zmiany warunków obróbki
i bez zmiany powierzchni obrabianej, ustawienia i zamocowania. Zabieg może być
wykonywany za pomocą jednego lub kilku przejść.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Zabieg jest wykonywany za pomocą czynności, która jest określonym zakończonym
działaniem pracownika, np. doprowadzeniem narzędzia do powierzchni obrabianej,
włączeniem lub wyłączeniem chłodziwa, uruchomieniem maszyny. Czynność składa się
z chwytów, które są najmniejszą możliwą do zmierzenia w czasie cząstką czynności. Chwyt
z kolei składa się z ruchów elementarnych, takich jak np. zaciśnięcie palców, przemieszczenie
dźwigni, naciśnięcie przycisku itp.
Schemat strukturalny procesu technologicznego przedstawia rysunek 2.
Rys. 2. Schemat strukturalny procesu technologicznego: [12, s. 340]
Przebieg procesu produkcyjnego, a więc i procesu technologicznego jest w znacznej
mierze uwarunkowany typem produkcji, który jest określany przez program produkcji.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co nazywamy maszyną, urządzeniem przemysłowym?
2. Jakie wyróżnia się rodzaje maszyn przemysłowych?
3. Jak dzieli się urządzenia przemysłowe?
4. Co nazywamy mechanizmem?
5. Jakie wyróżnia się mechanizmy najczęściej stosowane w maszynach przemysłowych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
4.1.3. Ćwiczenia
Ćwiczenie 1
Dokonaj klasyfikacji urządzeń przemysłowych, podział przedstaw graficznie według
schematu.
Rysunek do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przypomnieć sobie określenia poszczególnych rodzajów maszyn i urządzeń,
2) zapoznać się z podziałem urządzeń przemysłowych,
3) wyszukać przykłady poszczególnych rodzajów urządzeń przemysłowych,
4) ustalić kryteria podziału,
5) uporządkować urządzenia według z góry ustalonych kryteriów,
6) nanieść na schemacie wyszukane urządzenia zgodnie z przyjętym sposobem
porządkowania,
7) zaprezentować efekty swojej pracy,
8) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
stanowiska komputerowe z dostępem do Internetu,
−
katalogi maszyn i urządzeń,
−
plansze,
−
arkusz format A3 do ćwiczenia dla każdego zespołu,
−
przybory do pisania,
−
poradnik mechanika,
−
literatura z rozdziału 6.
Ćwiczenie 2
Dopasuj właściwą nazwę do określeń maszyn, urządzeń korzystając z kopert załączonych
do ćwiczenia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z określeniami: maszyna przemysłowa, urządzenie przemysłowe,
mechanizm, zespół,
2) odczytać określenia maszyn i urządzeń zapisane na kartkach,
3) dopasować nazwy do określeń maszyn i urządzeń,
4) zaprezentować efekty swojej pracy,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Urządzenia
przemysłowe

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Wyposażenie stanowiska pracy:
−
koperty z zestawami kartek z nazwami maszyn i urządzeń i osobno z ich określeniami,
−
przybory do pisania,
−
poradnik mechanika,
−
literatura z rozdziału 6.
Ćwiczenie 3
Rozpoznaj przedstawione na rysunkach poniżej maszyny i urządzenia przemysłowe.
Określ ich rodzaj, podaj główne zespoły i podzespoły występujące w tych maszynach.
Wykorzystaj tabelę znajdującą się pod rysunkami.
1
2
3
4
Lp
Nazwa urządzenia/maszyny
Główne zespoły i podzespoły
1
2
3
4
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami maszyn i urządzeń przemysłowych,
2) rozpoznać maszyny i urządzenia na rysunkach,
3) wpisać nazwy rozpoznanych obiektów do tabeli,
4) wyszukać główne zespoły i podzespoły występujące w rozpoznanych maszynach
i urządzeniach,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia z rysunkami maszyn i urządzeń,
−
przybory do pisania,
−
plansze o tematyce dotyczącej podstawowych zespołów i podzespołów występujących
w maszynach i urządzeniach przemysłowych,
−
poradnik mechanika,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) scharakteryzować proces produkcyjny i proces technologiczny?
o
o
2) scharakteryzować maszyny i urządzenia przemysłowe?
o
o
3) sklasyfikować maszyny i urządzenia przemysłowe?
o
o
4) rozpoznać maszyny i urządzenia?
o
o
5) podać przykłady maszyn i urządzeń przemysłowych?
o
o
6) wskazać różnicę pomiędzy maszyną a urządzeniem?
o
o
7) scharakteryzować zespół, podzespół i mechanizm maszyny?
o
o
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2. Maszyny i urządzenia hydrauliczne i pneumatyczne
4.2.1. Materiał nauczania
Napęd hydrauliczny jest to napęd wywołany ruchem cieczy pod ciśnieniem, oparty na
prawie Pascala. Sterowanie hydrauliczne jest kierowaniem pracą maszyny lub urządzenia za
pomocą cieczy pod ciśnieniem.
Napędy i sterowania hydrauliczne tworzone są z następujących elementów:
−
zbiornik z cieczą hydrauliczną,
−
zawory: zwrotne, regulujące dopływ cieczy hydraulicznej do silnika hydraulicznego,
siłownika hydraulicznego, itp.,
−
pompa hydrauliczna,
−
filtry,
−
silnik hydrauliczny,
−
siłownik hydrauliczny,
−
odpowietrzanie.
Układ hydrauliczny jest to zespół wzajemnie połączonych części, których zadaniem jest
przekazywanie energii lub sterowanie za pośrednictwem cieczy hydraulicznej pod ciśnieniem,
w układzie zamkniętym. Działanie układu hydraulicznego opiera się na wymuszonym
i sterowanym przepływie cieczy hydraulicznej, która wykonuje pracę. Ruch cieczy jest tu
wymuszany przez pompę, natomiast energia jest odbierana przez siłowniki hydrauliczne (albo
cylindry hydrauliczne - zmieniające energię strumienia cieczy w ruch prostoliniowy albo
silniki hydrauliczne, zmieniające energię strumienia cieczy na ruch obrotowy).
Na rysunkach układy hydrauliczne przedstawiane są w postaci schematów,
z zastosowaniem symboli graficznych zawartych w normie PN-ISO 1219–1 „Napędy
i sterowania hydrauliczne i pneumatyczne – Symbole graficzne i schematy układów –
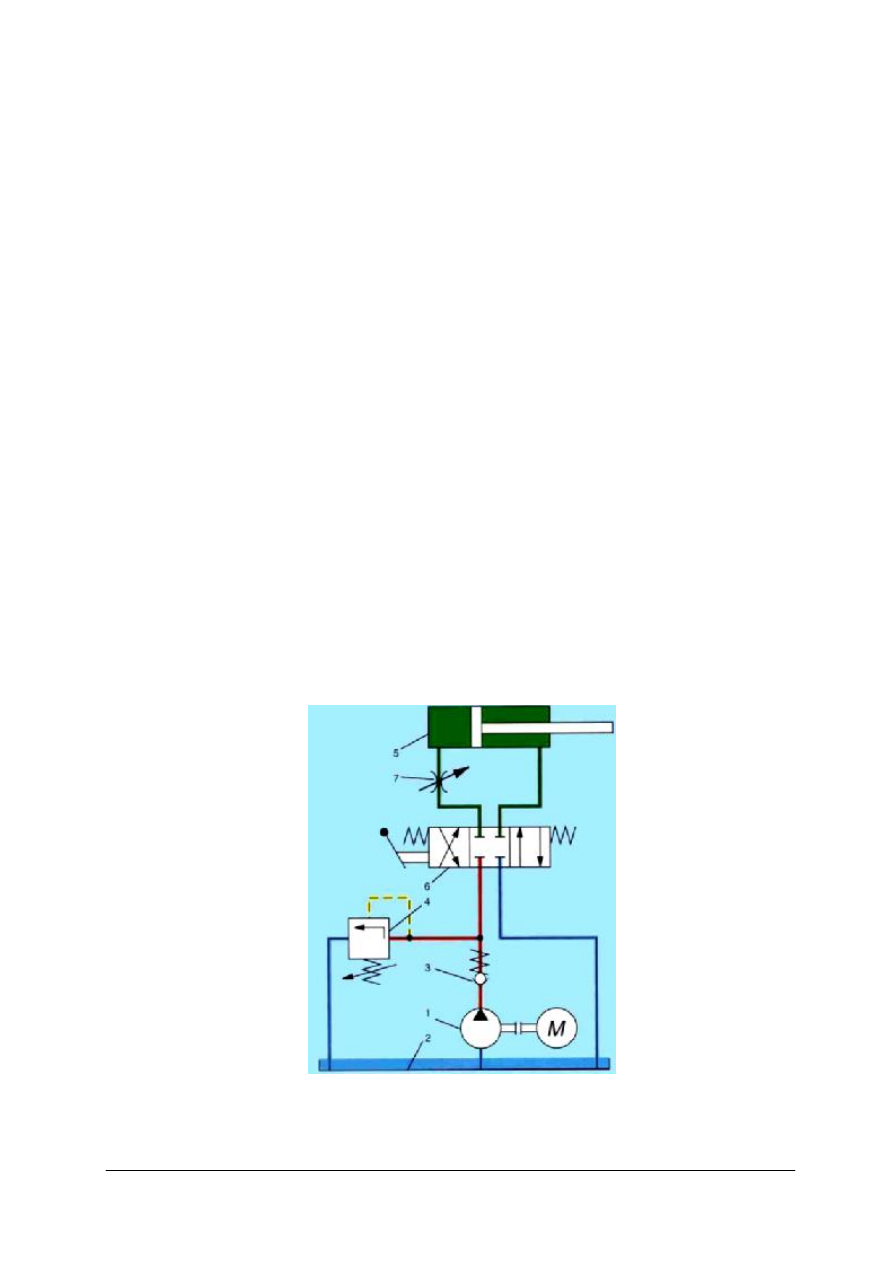
Symbole graficzne”. Schemat funkcjonalny układu z siłownikiem tłokowym przedstawia
rysunek 3.
Rys. 3. Schemat funkcjonalny układu z siłownikiem tłokowym: 1 – pompa, 2 – zbiornik, 3 – zawór zwrotny,
4 – zawór maksymalny, 5 – siłownik, 6 – rozdzielacz, 7 – zawór dławiący [1, s. 220]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Napęd pneumatyczny jest to napęd mechanizmów maszyn i urządzeń przy
wykorzystaniu energii sprężonego gazu, zazwyczaj tym gazem jest powietrze. Napędy
pneumatyczne najczęściej stosuje się w maszynach i urządzeniach technologicznych, głównie
do realizacji przesuwów mechanizmów oraz wywoływania określonego nacisku statycznego.
Urządzenia pneumatyczne wykorzystuje się do:
−
napędu urządzeń transportowych,
−
napędu urządzeń hamulcowych,
−
napędu narzędzi ręcznych wirujących i udarowych, itp.
Napęd pneumatyczny odbywa się za pomocą silników pneumatycznych o ruchu
posuwisto-zwrotnym (siłowników) lub o ruchu wirującym.
Układ pneumatyczny jest to zespół połączonych elementów przeznaczonych zarówno
do przekazywania energii, jak i sygnałów sterujących, za pośrednictwem sprężonego
powietrza. Podstawowym elementem układu jest siłownik pneumatyczny. Siłownik
pneumatyczny jest to urządzenie mechaniczne, zamieniające ciśnienie powietrza lub innego
gazu na ruch – przemieszczenie elementów albo wzdłużne, albo wokół swojej osi.
W
przemyśle,
najczęściej
wykorzystywane
są
układy
napędowe
mieszane
pneumohydrauliczne tj. takie, w których sprężone powietrze jest czynnikiem napędowym,
natomiast olej jest czynnikiem pomocniczym umożliwiającym np. uzyskanie bezstopniowego
nastawiania niewielkich prędkości ruchu tłoków lub też przenoszącym wysokie ciśnienie
robocze.
Pompy są to maszyny robocze przeznaczone do podniesienia cieczy z poziomu niższego
na wyższy lub przetłoczenia cieczy z przestrzeni ssawnej o ciśnieniu niższym do przestrzeni
tłocznej o ciśnieniu wyższym. Pompa otrzymuje energię mechaniczną od silnika napędowego
i za pośrednictwem elementu roboczego zamienia ją na energię cieczy. Działanie każdej
pompy polega na wytwarzaniu różnicy ciśnienia między ssawną i tłoczną stroną pompy.
Zależnie od sposobu wytwarzania różnicy ciśnień pompy dzielą się na pompy wyporowe
i pompy wirowe.
Podstawowymi parametrami pracy pomp wyporowych są: wydajność, wysokość
podnoszenia lub przyrost ciśnienia, moment obrotowy i moc potrzebna do napędu pompy
oraz sprawność.
Pompy wyporowe to maszyny, w których element roboczy oddziela szczelnie przestrzeń
ssawną od przestrzeni tłocznej, co umożliwia wsteczny przepływ cieczy. Ze względu na ruch
elementu roboczego pompy wyporowe dzielą się na:
−
pompy wyporowe o postępowo-zwrotnym ruchu elementu roboczego (pompy tłokowe,
wielotłoczkowe, przeponowe),
−
pompy wyporowe o obrotowo-zwrotnym ruchu elementu roboczego (pompy
skrzydełkowe),
−
pompy wyporowe o obrotowym ruchu elementu roboczego (pompy zębate, łopatkowe,
krzywkowe, śrubowe, ślimakowe),
−
pompy wyporowe o obiegowym ruchu elementu roboczego (pompy puszkowe).
Pompy wyporowe mogą pracować pojedynczo lub w bateriach.
Pompy tłokowe mogą być jedno- lub wielotłokowe oraz jedno- i dwustronnego
działania. Bardziej równomierną pracę zapewniają pompy tłokowe dwustronnego działania.
Ich zasadę działania przedstawia rysunek 4.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. 4. Pompa wyporowa tłokowa dwustronnego działania: 2 i 4 – zawór ssawny, 1 i 3 – zawór tłoczny
[1, s. 150]
Ciecz jest zasysana przez otwierający się zawór ssawny 4 podczas przesuwania tłoka
w lewe skrajne położenie przy jednoczesnym wytłoczeniu cieczy uprzednio zassanej przez
zawór tłoczny 1. Przy powrotnym ruchu tłoka zaworem tłocznym 3 zostaje wytłoczona ciecz
zassana w poprzednim cyklu. Jednocześnie następuje zassanie zaworem ssawnym 2 następnej
porcji cieczy.
Pompy wielotłoczkowe wykonywane są jako pompy wielocylindrowe i o zmiennym
skoku tłoczków. Pompy te, ze względu na sposób działania i rozwiązanie konstrukcyjne,
dzielą się na pompy promieniowe i osiowe.
Pompy skrzydełkowe pod względem zasady działania są zbliżone do pomp tłokowych
dwustronnego działania.
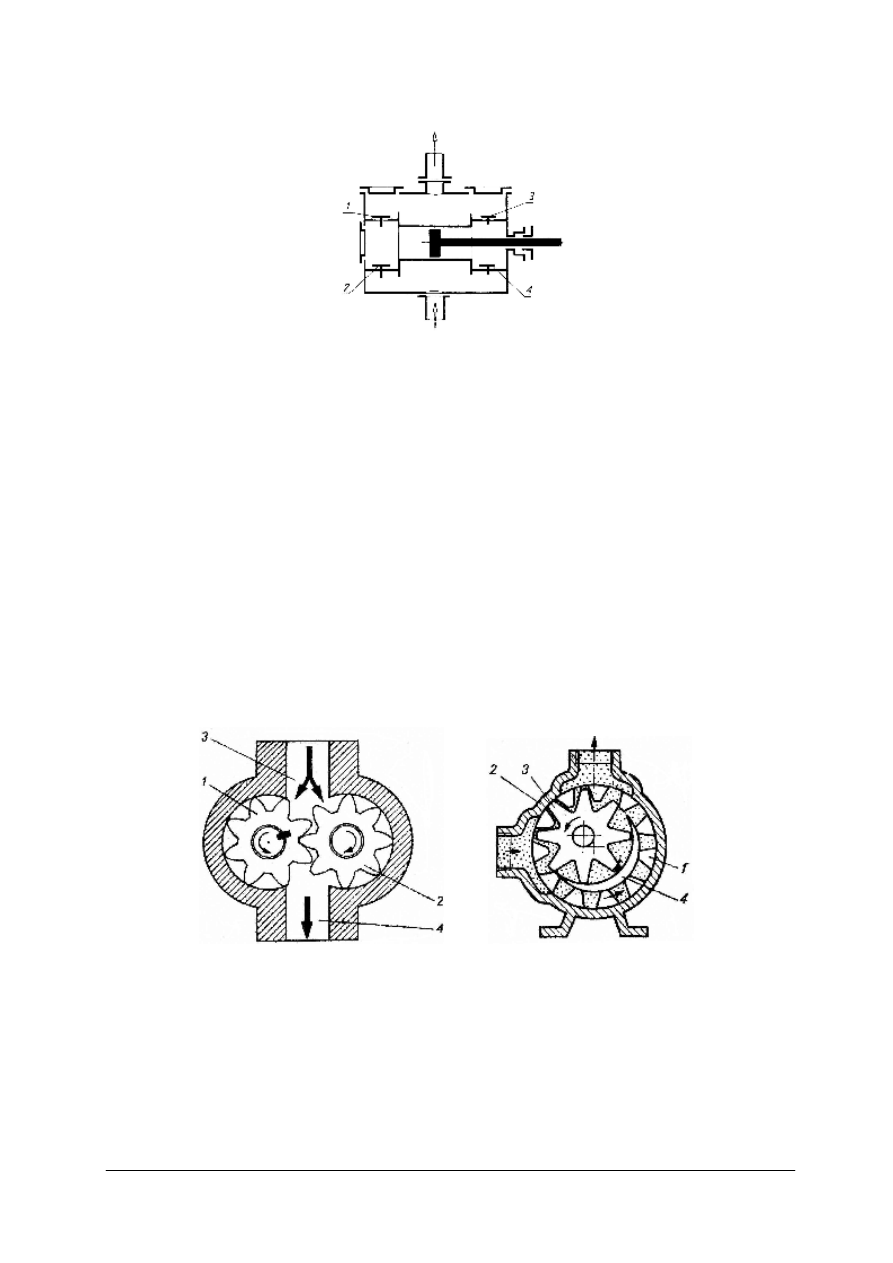
Pompy zębate dzielą się w zależności od rodzaju zazębienia na pompy o zazębieniu
zewnętrznym i pompy o zazębieniu wewnętrznym. W obu przypadkach koła mogą mieć zęby
proste, ukośne lub daszkowe. Schemat pompy zębatej o zazębieniu zewnętrznym przedstawia
rysunek 5a, o zazębieniu wewnętrznym rysunek 5b.
a)
b)
Rys. 5. Schemat pompy zębatej: a) o zazębieniu zewnętrznym: 1 – koło napędzające, 2 – koło napędzane,
3 – komora ssawna, 4 – komora tłoczna b) o zazębieniu wewnętrznym: 1 – koło napędzające,
2 – korpus, 3 – koło napędzane, 4 – przegroda [1, s. 150]
Pompy zębate ze względu na swą zwartą konstrukcję znalazły zastosowanie
w napędach hydraulicznych, układach smarowania silników samochodowych. Cechują się
dużą równomiernością pracy oraz niezawodnością.
Pompy łopatkowe posiadają element roboczy w postaci wysuwnych (promieniowo lub
ukośnie) łopatek. Pompy łopatkowe ze względu na swą delikatną konstrukcję stosowane są
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
wyłącznie do pompowania czystych i samosmarujących cieczy. Tradycyjnie są stosowane
w napędach hydraulicznych obrabiarek.
Pompy wirowe należą do grupy maszyn wirnikowych. Ich zasada działania polega na
zwiększaniu krętu cieczy w wirniku (tj. organie roboczym) zaopatrzonym w łopatki
i obracającym się ze stałą prędkością obrotową. Ciecz stale przepływająca przez wirnik
podlega działaniu siły odśrodkowej lub działaniu siły wyporu łopatek, albo obu tych sił
łącznie. W ten sposób energia silnika jest przekazywana cieczy za pośrednictwem wirnika,
powodując w niej wzrost energii ciśnienia i energii kinetycznej. Po wyjściu cieczy z wirnika
następuje dalsza przemiana jej energii kinetycznej w energię ciśnienia. Przyrost energii
kinetycznej i ciśnienia w pompie jest zależny od konstrukcji wirnika i jego prędkości
obrotowej. W odróżnieniu od pomp wyporowych przyrost wysokości podnoszenia w pompie
wirowej jest zależny od wydajności.
W zależności od kierunku przepływu cieczy w wirniku pompy wirowe dzieli się na:
−
pompy promieniowe (odśrodkowe),
−
pompy osiowe (diagonalne i śrubowe),
−
pompy promieniowo-osiowe (helikoidalne).
Mogą to być pompy jednostopniowe – z jednym wirnikiem lub wielostopniowe – z kilkoma
wirnikami.
Pompy promieniowe posiadają element roboczy w postaci wirnika osadzonego na wale
sprzężonym z silnikiem napędowym. Z chwilą uruchomienia łopatki obracającego się wirnika
odrzucają cząsteczki cieczy ku obwodowi korpusu wskutek działania siły odśrodkowej.
Powoduje to powstanie różnicy, mniejszego ciśnienia w osi wirnika i większego na jego
obwodzie. Wytworzona różnica ciśnień umożliwia zassanie cieczy i jej wytłoczenie rurą
tłoczną. Warunkiem działania pompy jest wstępne zalanie jej cieczą, która wypełni rurę
ssawną i korpus pompy. Schemat pompy promieniowej przedstawia rysunek 6.
Rys. 6. Schemat pompy promieniowej: 1 – wirnik, 2 – korpus, 3 – rura ssawna, 4 – rura tłoczna 5 – smok,
6 – zawór zwrotny, 7 – zawór regulacyjny, 8 – dławica [1, s. 155]
Pompy odśrodkowe są najczęściej stosowanymi pompami. Wydajności podnoszenia,
w zależności od wielkości wirnika leżą w zakresie od kilku centymetrów na minutę dla pomp
miniaturowych do 7000 m
3
/h dla pomp stosowanych w instalacjach przemysłowych. Pompy
promieniowe wyposażone w wirniki gumowe mogą być także stosowane do pompowania
zawiesin, szlamów lub cieczy agresywnych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
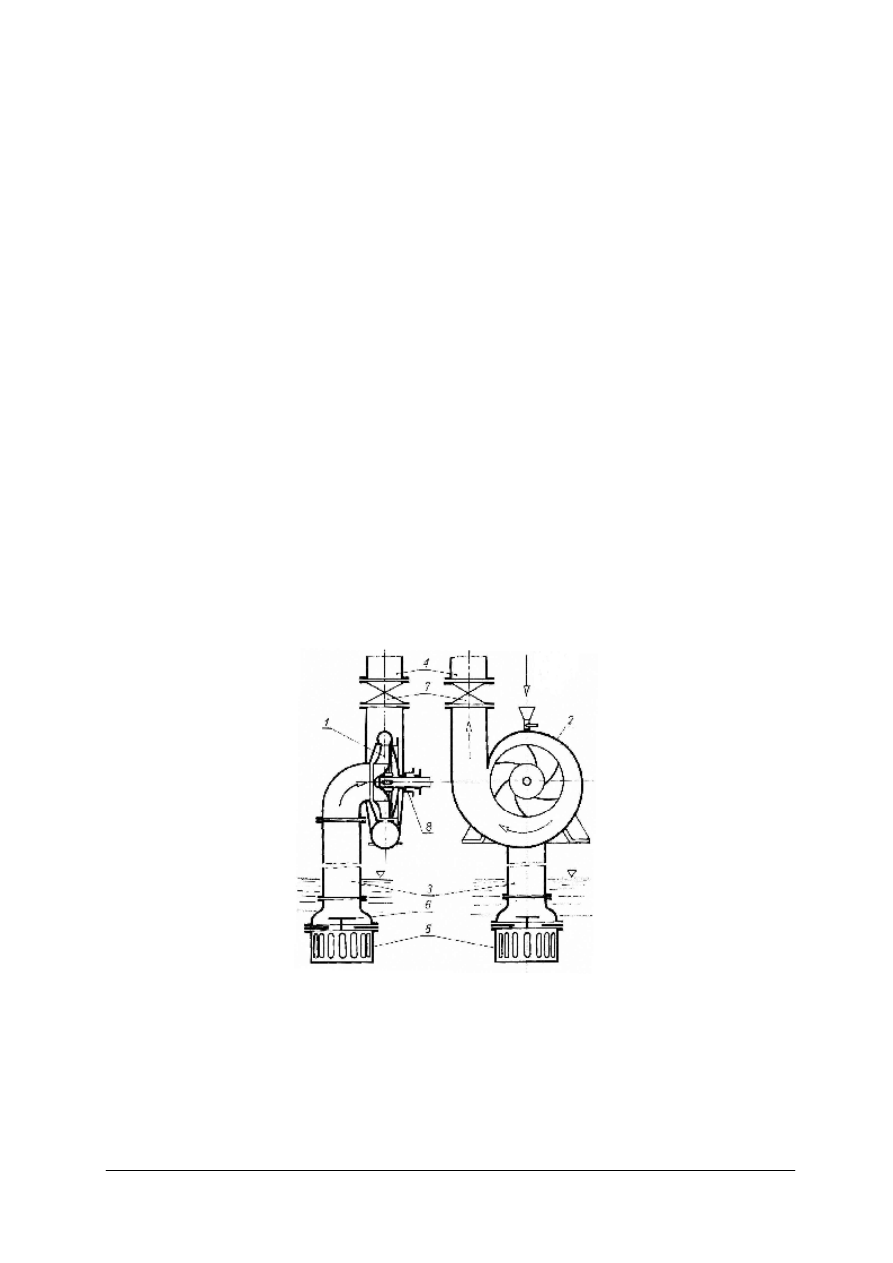
Pompy osiowe - śrubowe posiadają element roboczy w postaci wirnika. Odpowiednio
ukształtowane łopatki wirnika wskutek ruchu obrotowego powodują podniesienie cieczy na
wymaganą wysokość. Kierownica znajdująca się za wirnikiem służy do kierunkowania strugi
cieczy. Schemat pompy promieniowej przedstawia rysunek 7.
Rys. 7. Schemat pompy osiowej: 1 – wirnik, 2 – kierownica, 3 – korpus [1, s.155]
Pompy śmigłowe ze względu na niewielką wysokości podnoszenia przeważnie poniżej
12m oraz bardzo wysokie wydajności dochodzące do 40000 m
3
/h stosowane są
w instalacjach przemysłowych i energetycznych.
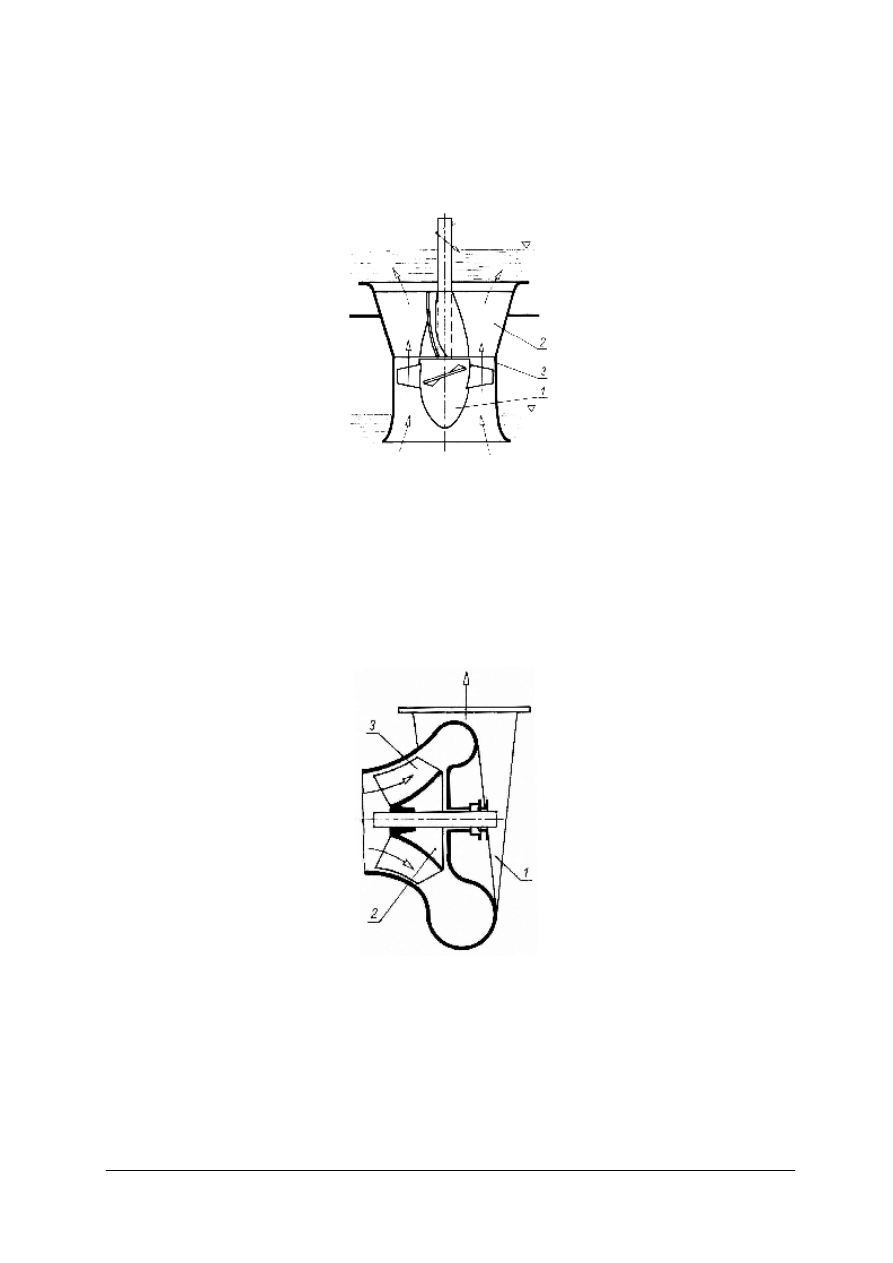
Pompy promieniowo-osiowe różnią się od pomp odśrodkowych nieco innym
ukształtowaniem korpusu i wirnika. Wirnik w kształcie stożka z łopatkami umożliwia
zasysanie cieczy wzdłuż osi wirnika, a następnie tłoczenie jej w spiralnym korpusie. Schemat
pompy promieniowo-osiowej przedstawia rysunek 8.
Rys. 8. Schemat pompy promieniowo-osiowej: 1 – korpus, 2 – wirnik, 3 – łopatki [1, s.156]
Pompy promieniowo-osiowe osiągają wysokości podnoszenia w zakresie 5 do 60m oraz
wysokie wydajności dochodzące do 14000 m
3
/h. Są stosowane w instalacjach przemysłowych
lub odwadniających do pompowania cieczy czystych lub lekko zanieczyszczonych.
Podstawowymi parametrami pracy pomp są: wydajność, wysokość podnoszenia lub
przyrost ciśnienia, moment obrotowy i moc potrzebna do napędu pompy oraz sprawność.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Sprężarki są to maszyny służące do sprężania powietrza i innych gazów, od niższego
ciśnienia ssania do wyższego ciśnienia tłoczenia. W zależności od zasady działania, sprężarki
dzieli się na wyporowe i wirowe (przepływowe).
Sprężarki wyporowe dzieli się na:
−
tłokowe, o posuwisto-zwrotnym ruchu tłoka,
−
rotacyjne, o obrotowym ruchu organu roboczego.
Sprężarki wirowe (przepływowe) dzieli się na:
−
promieniowe, o promieniowym przepływie gazu,
−
osiowe, o osiowym przepływie gazu,
−
promieniowo-osiowe, o ukośnym przepływie gazu.
Sprężarki są szeroko stosowane zarówno w przemyśle (napęd różnego rodzaju narzędzi
–
kluczy pneumatycznych, szlifierek, wiertarek, młotów, piaskowanie, malowanie natryskowe,
dystrybucja gazów technicznych, pompowanie opon samochodowych, przetłaczanie gazu
ziemnego, podnoszenie ciśnienia w układach turbin gazowych, turbodoładowanie silnika
spalinowego) jak i w gospodarstwie domowym (chłodziarka, wentylator i inne).
Sprężarki wyporowe
Sprężarki tłokowe są to urządzenia, w których zwiększanie ciśnienia gazu następuje
wskutek ruchu posuwistego tłoka w cylindrze. Należą zatem do grupy sprężarek
objętościowych. Działanie sprężarki tłokowej jest niemal identyczne jak pompy tłokowej. Pod
względem budowy sprężarki tłokowe dzieli się na:
−
jednocylindrowe i wielocylindrowe,
−
stojące i leżące, o jednostronnym lub dwustronnym działaniu tłoka.
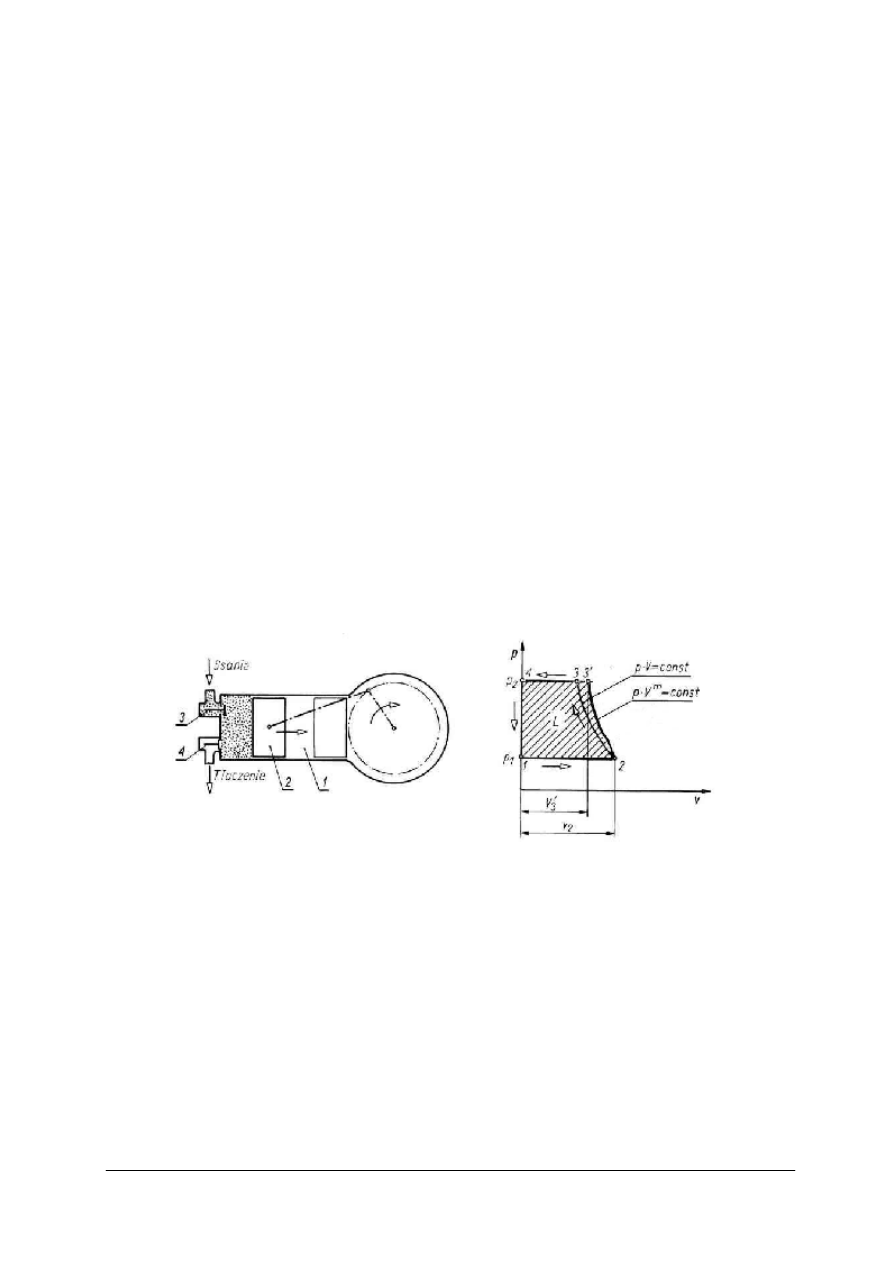
Budowę, zasadę działania doskonałej sprężarki tłokowej oraz jej wykres pracy
przedstawia rysunek 9.
Rys. 9. Schemat i wykres pracy sprężarki jednostopniowej: 1 – cylinder, 2 – tłok, 3 – zawór ssawny,
4 – zawór tłoczny [1, s. 222]
Tłok 2, napędzany przez silnik za pośrednictwem mechanizmu korbowego przesuwa się
w cylindrze 1. Podczas ruchu w prawo wytwarza w nim podciśnienie, w wyniku czego
następuje otwarcie zaworu ssawnego 3 i zassanie do cylindra gazu o ciśnieniu
1
p (linia 1–2).
W trakcie powrotnego ruchu tłoka zamyka się zawór ssawny 3 i rozpoczyna się sprężanie
gazu, aż do osiągnięcia wymaganej wartości
2
p (linia 2-3). Sprężony gaz pokonuje opór
sprężyny zaworu tłocznego 4, którym następuje jego wtłoczenie pod stałym ciśnieniem
2
p do
odbiornika (linia 3–4).
Po osiągnięciu lewego skrajnego położenia tłoka gaz zostaje całkowicie usunięty
z cylindra 1, podczas gdy jednocześnie zamyka się zawór tłoczny (linia 4–1). Ponowne
otwarcie zaworu ssawnego rozpoczyna kolejny cykl pracy sprężarki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
W wyniku sprężania temperatura gazu wzrasta, dlatego cylinder sprężarki musi być
chłodzony wodą lub powietrzem. Przy założeniu, że tłok porusza się bardzo wolno, a cylinder
jest intensywnie chłodzony, można przyjąć, iż zmiana objętości gazu zachodzi tylko wskutek
sprężania powodowanego ruchem tłoka. W tym przypadku sprężanie odbywa się przy stałej
temperaturze, a więc jest to przemiana izotermiczna (linia 2-3). W sprężarce rzeczywistej
sprężanie następuje wzdłuż linii 2-3’, a więc tworzy przemianę politropową. Zakreskowane
pole wykresu pracy sprężarki przedstawia pracę pobraną przez gaz w jednym cyklu sprężania.
Ze względu na przebieg pracy sprężania, sprężarki tłokowe dzieli się na jednostopniowe
i wielostopniowe. Sprężarki wielostopniowe budowane są w celu uzyskania wyższego stopnia
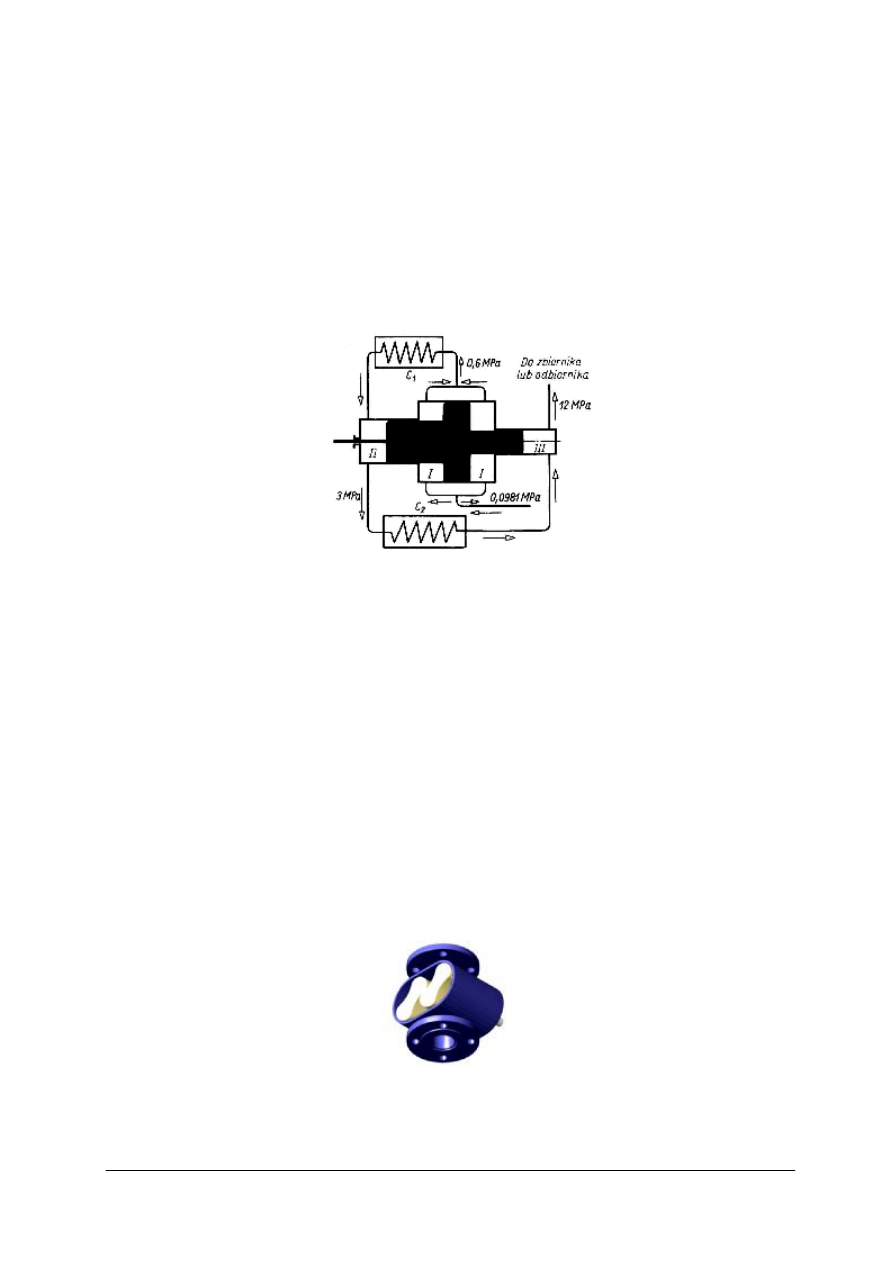
sprężania gazu. Schemat sprężarki tłokowej trzystopniowej przedstawia rysunek 10.
Rys. 10. Sprężarka tłokowa trzystopniowa [1, s. 223]
Sprężanie odbywa się kolejno w kilku cylindrach (I ÷ III) z jednoczesnym chłodzeniem
międzystopniowym wodą. W korpusie porusza się wspólny tłok różnicowy o trzech różnych
średnicach, zasysając gaz do niskoprężnej części cylindra I. Po sprężeniu gazu do ciśnienia
np. 0,6 MPa zostaje on izobarycznie ochłodzony w chłodnicy wodnej C
1
do temperatury
początkowej, a następnie zassany do średnioprężnej komory II podczas przesuwania się tłoka
w prawe skrajne położenie. Przy ruchu powrotnym tłoka gaz zostaje sprężony do ciśnienia np.
3 MPa i wytłoczony do chłodnicy C
2
, gdzie ponownie jest ochłodzony i dalej doprowadzany
do wysokociśnieniowej części cylindra III, w której ulega sprężeniu do końcowej wartości
ciśnienia np. 12 MPa. Stamtąd odprowadza się go do zbiornika lub odbiornika.
Sprężarki rotacyjne są to urządzenia, w których zwiększanie ciśnienia gazu następuje
wskutek ruchu obrotowego organu roboczego. Buduje się je jako jedno- i dwustopniowe.
Budową i zasadą działania są bardzo zbliżone do pomp łopatkowych.
Odmianą konstrukcyjną sprężarek rotacyjnych są sprężarki z wirującymi tłokami,
gdzie zazębiające się tłoki tworzą zamknięte przestrzenie, które przemieszczając się od części
ssawnej do tłocznej sprężarki zmniejszają swoją objętość, powodując sprężanie gazu. Widok
takiej pompy przedstawia rysunek 11.
Rys. 11. Sprężarka rotacyjna z wirującymi tłokami
Ponadto w technice stosowane są także inne rozwiązania konstrukcyjne sprężarek
wyporowych, jak: sprężarki śrubowe, sprężarki spiralne.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Sprężarki wirowe
Sprężarka promieniowe jest to sprężarka, w której przepływ gazu przez wirnik jest
promieniowy. Sprężarki promieniowe charakteryzują się wysoką sprawnością, gdy pracują
przy parametrach nominalnych oraz posiadają wysoki stosunek sprężania π ≤ 3. Schemat
sprężarki promieniowej przedstawia rysunek 12a.
Sprężarka osiowa jest to sprężarka, w której przepływ gazu przez wirnik jest osiowy.
Sprężarki osiowe charakteryzują się wysoką sprawnością, gdy pracują przy parametrach
nominalnych. Zdolne są osiągnąć wysokie natężenie przepływu przy stosunkowo małych
wymiarach poprzecznych. Wadą sprężarek osiowych jest stosunkowo niski stosunek
sprężania. Schemat sprężarki osiowej przedstawia rysunek 12b.
Sprężarka osiowo-promieniowa to sprężarka, w której przepływ gazu przez wirnik jest
ukośny (promieniowo-osiowy). Wirnik takiej sprężarki ma konstrukcję podobną do wirnika
pompy helikoidalnej. Parametry sprężarki osiowo-promieniowej są pośrednie pomiędzy
parametrami sprężarki osiowej i promieniowej.
a)
b)
Rys. 12. Sprężarki wirowe: a) promieniowa, b) osiowa; 1 – króciec ssawny, 2 – kierownica wstępna, 3 – wirnik,
4 – kierownica zawirnikowa, 5 – dyfuzor [1, s. 223]
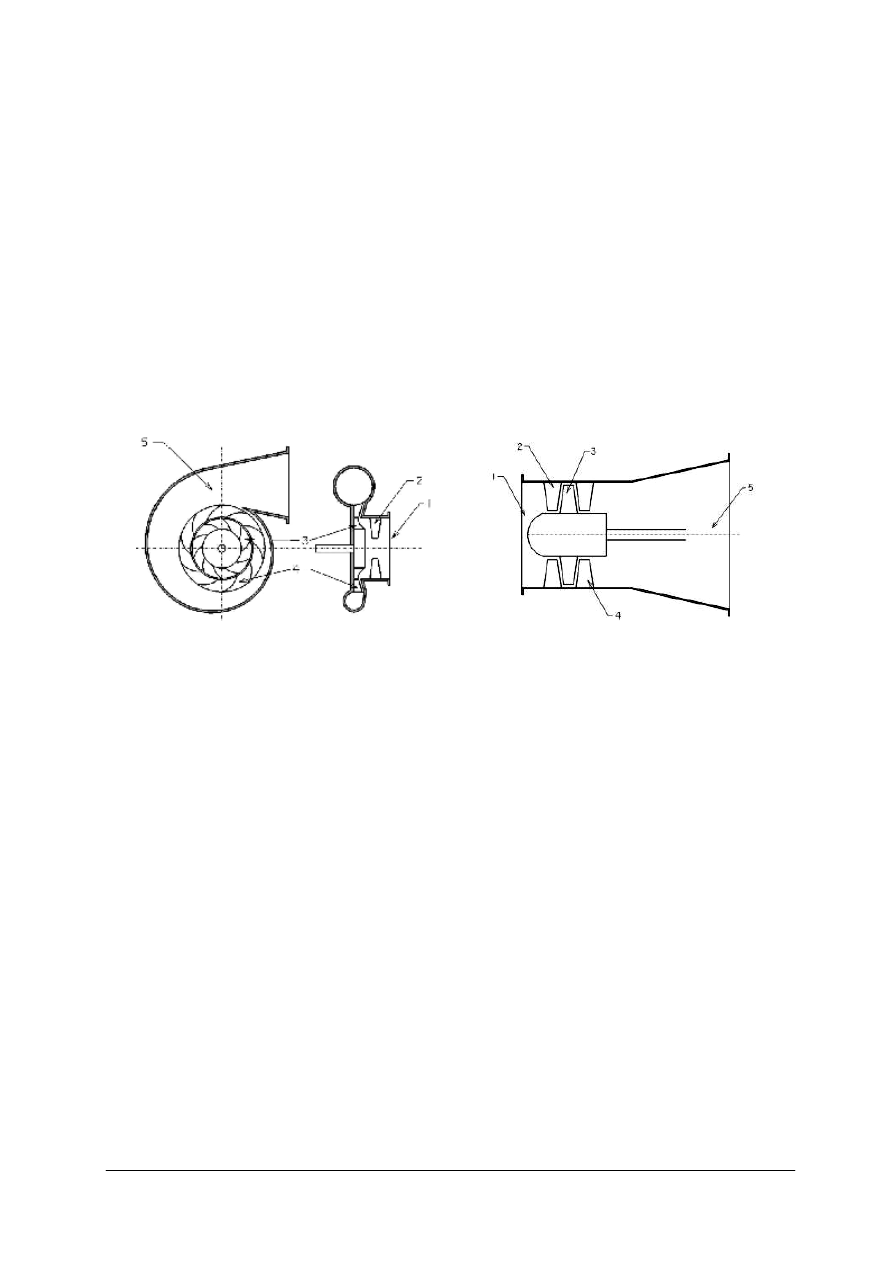
Wentylator to maszyna przepływowa służąca do transportowania powietrza lub innych
gazów. Przepływ odbywa się z pomieszczeń do otoczenia lub odwrotnie, oraz przez
urządzenia technologiczne, za pośrednictwem przewodów wentylacyjnych. Przekazywanie
energii do pokonania oporów przepływu odbywa się w wirniku, podstawowej części
składowej wentylatora. Źródłem napędu wentylatora jest silnik elektryczny. Napęd może być
realizowany jako bezpośredni, pasowy lub sprzęgłowy. Wirnik wentylatora musi pracować
w obudowie spiralnej lub rurowej, zakończonej króćcami na ssaniu i tłoczeniu. Energia
mechaniczna doprowadzona do wentylatora zamieniona zostaje na przyrost ciśnienia
statycznego i dynamicznego, potrzebny do pokonania przepływowych strat ciśnienia gazu
w urządzeniach i przewodach. Przyrost ciśnienia statycznego gazu w wentylatorach jest
minimalny (nie przekracza 13 kPa). Ze względu na cechy konstrukcyjne wentylatory dzielą
się na: osiowe i promieniowe.
Wentylatory osiowe dzieli się na: śmigłowe, normalne, przeciwbieżne.
Wentylatory promieniowe dzieli się na: normalne, bębnowe, poprzeczne.
Podstawowymi parametrami technicznymi wentylatorów są:
−
wydajność [m
3
/s],
−
wytworzone ciśnienie (spiętrzenie całkowite) [Pa],
−
sprawność [%].
Wentylatory osiowe
Wentylator śmigłowy składa się łopatkowego wirnika przypominającego śmigło. Małe
wentylatory śmigłowe nie wymagają korpusu a ich łopatki mogą być wykonane nawet
z miękkiej gumy. Wentylatory śmigłowe znajdują zastosowanie w instalacja wentylacyjnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
oraz do wentylowania mieszkań. Wielkie wentylatory śmigłowe stosowane są chłodnicach
kominowych elektrowni cieplnych.
Wentylator normalny jest najbardziej typową konstrukcją wentylatora osiowego.
W konstrukcji przypomina sprężarkę osiową. Odmienna konstrukcja kierownicy lub jej
całkowity brak powoduje większy udział energii kinetycznej w całkowitej energii gazu.
Wentylatory osiowe znajdują zastosowanie w instalacjach wentylacyjnych, klimatyzacyjnych,
odpylających i innych aplikacjach przemysłowych.
Wentylator osiowy przeciwbieżny jest zdwojonym wentylatorem osiowym, w którym
dwa wirniki ustawione szeregowo, obracają się w przeciwnych kierunkach. Wentylatory tego
typu charakteryzują się brakiem zawirowań gazu, nie muszą więc być wyposażone
w kierownicę. Wentylatory osiowe przeciwbieżne znajdują zastosowanie w instalacjach
wentylacyjnych okrętów i kopalń.
Wentylatory promieniowe
Wentylator normalny w konstrukcji przypomina sprężarkę promieniową. Odmienna
konstrukcja kierownicy lub jej całkowity brak powoduje większy udział energii kinetycznej
w całkowitej energii gazu.
Wentylator promieniowy bębnowy charakteryzuje się dużą szerokością wirnika.
Szerokość wirnika w tego typu wentylatorach jest zwykle dwukrotnie większa od jego
średnicy. Uzyskuje się w ten sposób wysoką wydajność przy relatywnie małych gabarytach.
Wentylatory bębnowe stosuje się w instalacjach wentylacyjnych i grzewczych.
Wentylator poprzeczny jest to wentylator, w którym powietrze przepływa w poprzek
wirnika. Wpływa do niego w obszarze ssawnym, przepływa przez jego wnętrze i zostaje
wyrzucone w obszarze tłocznym. Powietrze przez wirnik przepływa dwukrotnie i dwukrotnie
jest przyśpieszane. Zaletą tego typu wentylatorów jest cicha praca, stąd często
wykorzystywane są w urządzeniach klimatyzacyjnych. Wentylatory poprzeczne stosuje się do
chłodzenia urządzeń.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Z jakich podstawowych elementów składa się układ hydrauliczny, pneumatyczny?
2. Jakie jest przeznaczenie poszczególnych elementów układów hydraulicznych
i pneumatycznych?
3. Do jakiej grupy maszyn zalicza się pompy i jakie wyróżnia się rodzaje pomp?
4. Jakie podstawowe parametry charakteryzują pracę pomp?
5. Jak zbudowana jest pompa wyporowa?
6. Jaka jest zasada działania pomp wyporowych?
7. Jakie jest przeznaczenie poszczególnych rodzajów pomp?
8. Do jakiej grupy maszyn zalicza się sprężarki?
9. Jakie wyróżnia się rodzaje sprężarek ze względu na konstrukcję?
10. Jaka jest budowa i zasada działania sprężarki tłokowej?
11. Do jakiej grupy maszyn zalicza się wentylatory?
12. Jakie wyróżnia się rodzaje wentylatorów?
4.2.3. Ćwiczenia
Ćwiczenie 1
Na podstawie dokumentacji techniczno-ruchowej urządzenia, rozpoznaj pompę
zastosowaną w napędzie hydraulicznym, wypisz jej charakterystyczne parametry.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się podstawowymi rodzajami pomp stosowanych w napędach hydraulicznych,
2) zapoznać się podstawowymi parametrami charakteryzującymi pompy,
3) zapoznać się z dokumentacją techniczno-ruchową urządzenia,
4) odszukać w polskich normach i katalogach potrzebną pompę,
5) podać oznaczenie pompy i jej parametry techniczne,
6) zaprezentować efekty swojej pracy,
7) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
tablice poglądowe dotyczące pomp,
−
dokumentacja techniczno-ruchowa urządzenia,
−
Polskie Normy i katalogi pomp,
−
literatura z rozdziału 6.
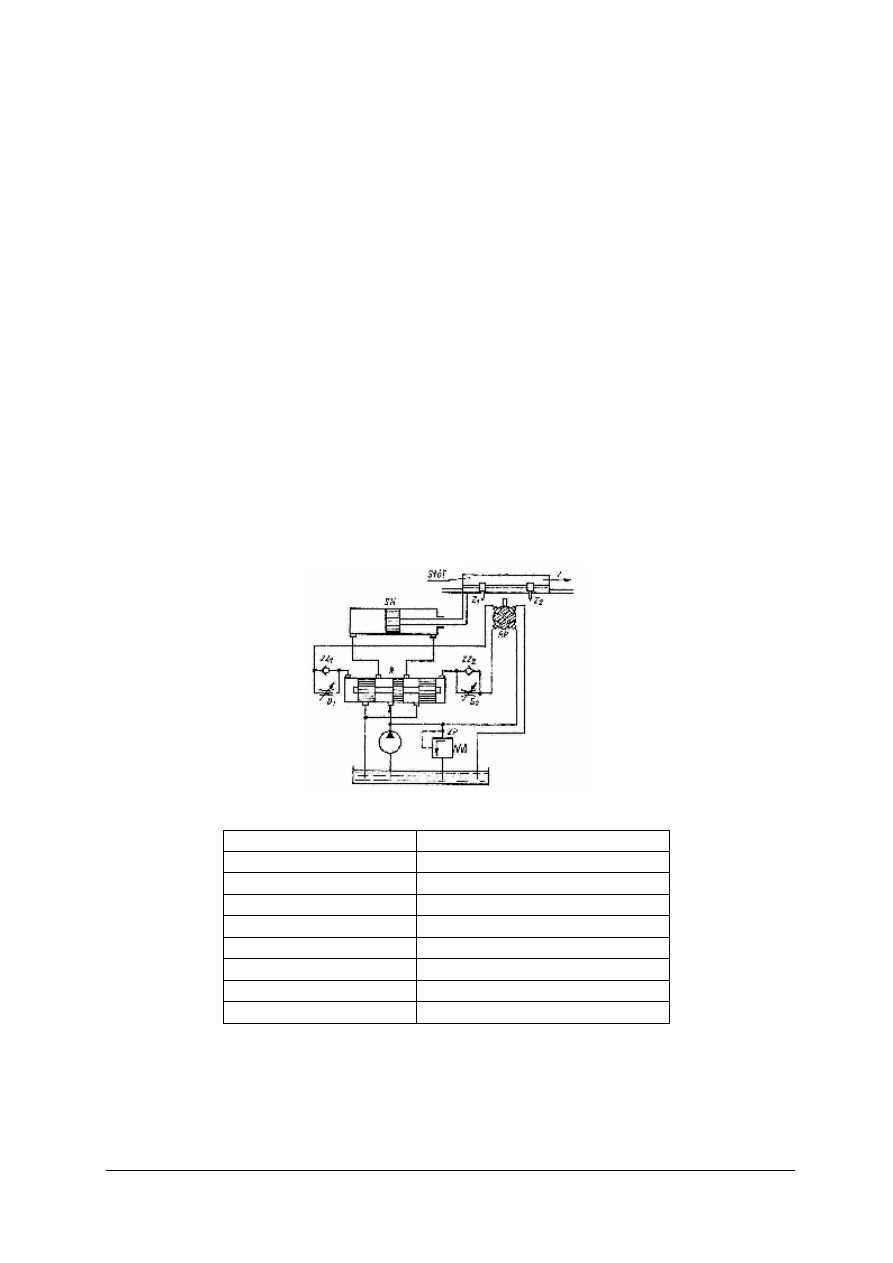
Ćwiczenie 2
Na poniższym rysunku przedstawiono schemat napędu ruchu prostoliniowego stołu
maszyny z hydraulicznie sterowanym rozdzielaczem zmiany kierunku. Rozpoznaj elementy
układu hydraulicznego. Uzupełnij tabelę znajdującą się w arkuszu do ćwiczenia.
Rysunek do ćwiczenia 2
Oznaczenie na rysunku
Nazwa elementu
SH
R
RP
Rozdzielacz pomocniczy
D
1
, D
2
ZZ
1
, ZZ
2
ZP
Z
1
, Z
2
Zderzaki
P
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z elementami układów hydraulicznych,
2) zapoznać się z symbolami graficznymi elementów hydraulicznych,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
3) rozpoznać elementy układu hydraulicznego,
4) wpisać nazwy elementów układu hydraulicznego do tabeli,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia ze schematem hydraulicznym,
−
norma PN-ISO 1219–1 „Napędy i sterowania hydrauliczne i pneumatyczne – Symbole
graficzne i schematy układów – Symbole graficzne”,
−
literatura z rozdziału 6.
Ćwiczenie 3
Rozpoznaj i podaj właściwą nazwę elementów układu pneumatycznego przedstawionego
na rysunku.
Rysunek do ćwiczenia 3
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z elementami układów pneumatycznych,
2) zapoznać się z symbolami graficznymi elementów pneumatycznych,
3) rozpoznać elementy układu pneumatycznego,
4) wypełnić arkusz do ćwiczenia,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia ze schematem pneumatycznym,
−
przybory do pisania,
−
norma PN-ISO 1219–1 „Napędy i sterowania hydrauliczne i pneumatyczne – Symbole
graficzne i schematy układów – Symbole graficzne”,
−
literatura z rozdziału 6.
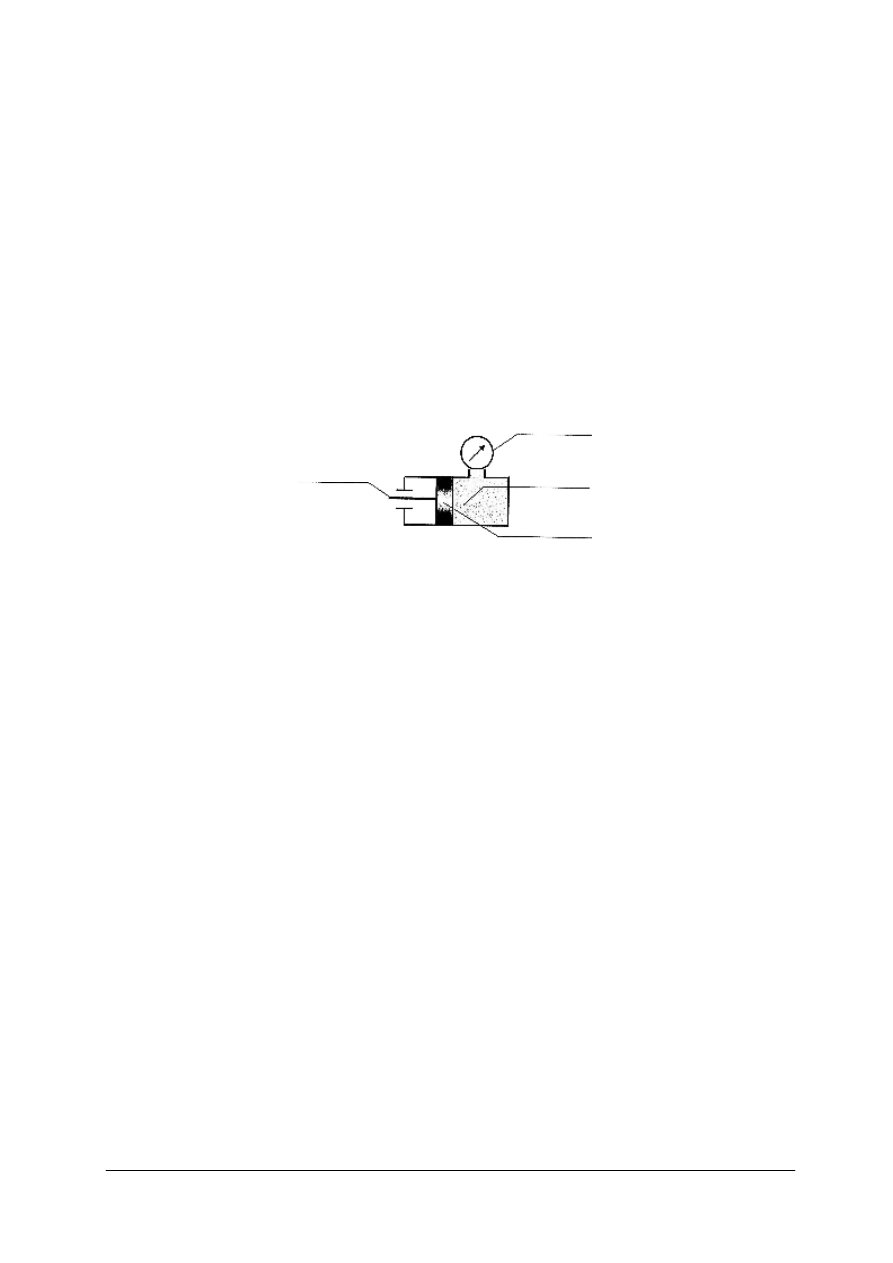
Ćwiczenie 4
Dobierz sprężarkę przeznaczoną do oczyszczania płyt modelowych, której model
przedstawia rysunek. Wymagania stawiane urządzeniu są następujące: wydajność minimalna
250 l/min i wartość wytwarzanego przyrostu ciśnienia 10 bar.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Rysunek do ćwiczenia 4
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się podstawowymi parametrami charakteryzującymi sprężarki,
2) zapoznać się z wymaganiami instrukcji eksploatacji układu tłoczącego,
3) odszukać w polskich normach i katalogach potrzebną sprężarkę,
4) podać oznaczenie dobranej sprężarki i jej parametry techniczne,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
tablice poglądowe dotyczące sprężarek,
−
katalogi sprężarek,
−
Polskie Normy,
−
stanowisko komputerowe z dostępem do Internetu,
−
literatura z rozdziału 6.
Ćwiczenie 5
Dobierz wentylator promieniowy, który ma być zastosowany w układzie wywiewnym,
napędzany silnikiem elektrycznym o mocy 2 kW, aby był on w stanie wytworzyć ciśnienie
∆
p = 3000 Pa i posiadał wydajność objętościową Q = 1400 m
3
/h.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się podstawowymi parametrami charakteryzującymi wentylatory,
2) odszukać w polskich normach i katalogach potrzebny wentylator,
3) podać oznaczenie dobranego wentylatora i jego parametry techniczne,
4) zaprezentować efekty swojej pracy,
5) uzasadnić wybór wentylatora,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
tablice poglądowe dotyczące wentylatorów,
−
katalogi wentylatorów,
−
Polskie Normy,
−
stanowisko komputerowe z dostępem do Internetu,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wyjaśnić budowę i zasadę działania układów hydraulicznych
i pneumatycznych?
o
o
2) rozróżnić i określić przeznaczenie elementów napędów hydraulicznych
i pneumatycznych?
o
o
3) wyjaśnić budowę i zasadę działania pompy wyporowej i wirowej?
o
o
4) scharakteryzować parametry techniczne pomp?
o
o
5) dobrać pompę określając parametry techniczne urządzenia ze względu
na stawiane warunki pracy?
o
o
6) sklasyfikować sprężarki ze względu na ich konstrukcję?
o
o
7) wyjaśnić budowę, zasadę działania sprężarki tłokowej?
o
o
8) dobrać sprężarkę do instalacji sprężonego powietrza?
o
o
9) wyjaśnić budowę wentylatorów osiowych i promieniowych?
o
o
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
4.3. Urządzenia transportu wewnętrznego
4.3.1. Materiał nauczania
Urządzenia dźwigowo-transportowe są to urządzenia transportu bliskiego do poziomego
lub/i pionowego przemieszczania materiałów i obiektów, w obrębie placu składowego,
magazynu, hali fabrycznej, fabryki lub innego obiektu. Należą do nich:
−
urządzenia dźwignicowe inaczej dźwignice,
−
urządzenia transportowe.
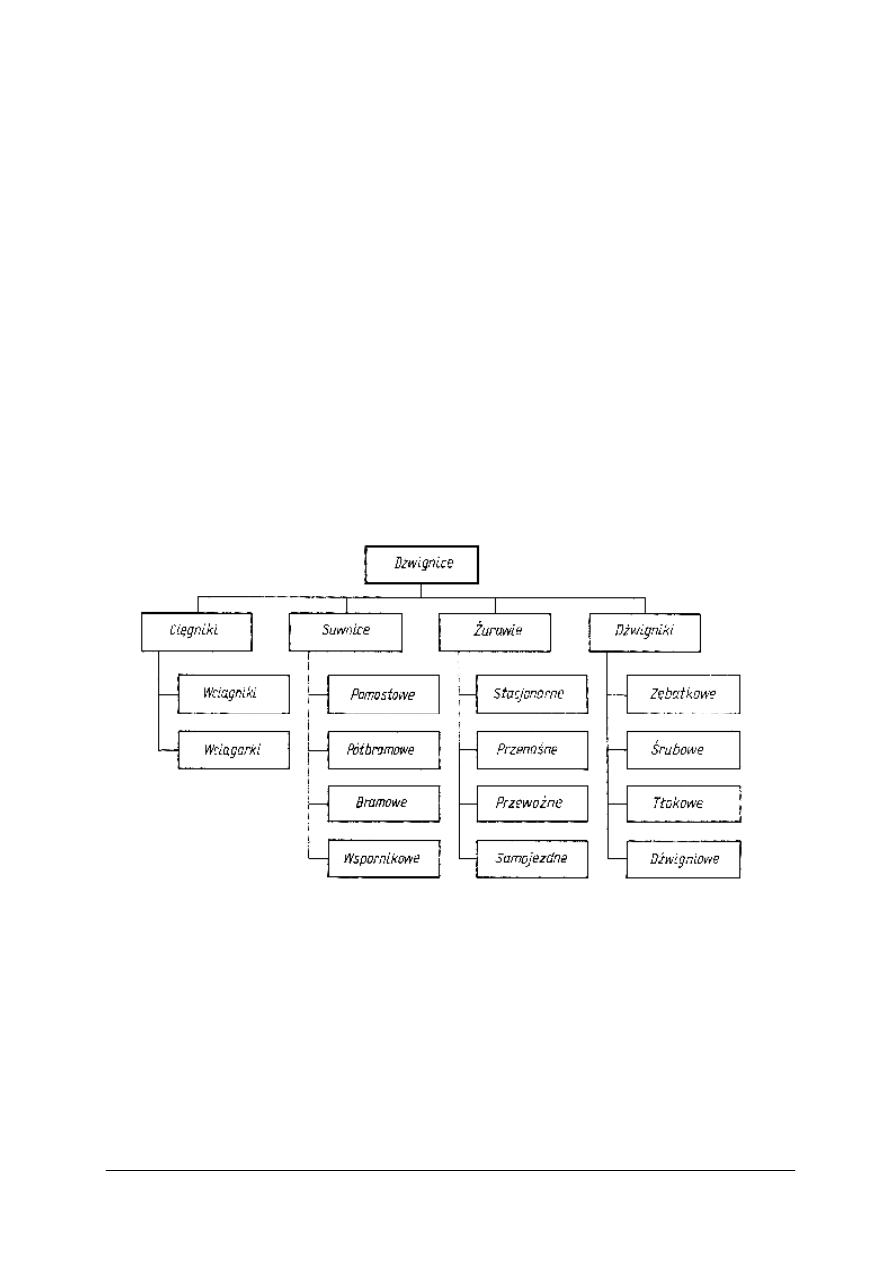
Dźwignice to grupa urządzeń dźwigowo-transportowych, służących do przemieszczania
pionowego/poziomego ładunków na niewielkie odległości, w ruchu przerywanym.
Urządzenie transportowe jest to urządzenie dźwigowo-transportowe do wewnętrznego
transportu materiałów i obiektów, w obrębie placu składowego, magazynu, hali fabrycznej,
fabryki placu budowy lub innego obiektu. Urządzenia transportowe dzielą się na:
−
urządzenia transportowe o ruchu przerywanym, najczęściej są to wózki transportowe
o różnym sposobie napędzania i przeznaczeniu,
−
urządzenia transportowe o ruchu ciągłym, są to przenośniki, które zapewniają ciągły
transport materiałów.
Podział najczęściej stosowanych dźwignic przedstawia rysunek 13.
Rys. 13. Podział najczęściej spotykanych dźwignic [7, s. 9]
Podstawowymi parametrami, które decydują o doborze dźwignicy to:
−
udźwig nominalny,
−
przestrzenny zasięg pracy,
−
prędkości ruchów roboczych: prędkości liniowej podnoszenia i jazdy oraz prędkość
kątowa obrotu żurawia,
−
wydajność.
Dźwignice oraz ich mechanizmy dzieli się na grupy ze względu na natężenie pracy.
Grupa natężenia pracy decyduje o doborze znormalizowanych zespołów oraz elementów.
Należy pamiętać, że nie zawsze grupa natężenia pracy np. mechanizmu podnoszenia pokrywa
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
się z grupą natężenia pracy dźwignicy. Pozostałe mechanizmy również mogą być zaliczane do
grup innych niż cała dźwignica.
Podstawowe zespoły i elementy dźwignic
W zależności od przeznaczenia dźwignice są wyposażone w następujące zespoły
i elementy:
−
cięgna nośne: liny i łańcuchy,
−
zespoły chwytające: haki, pętle, zawiesia, uchwyty i chwytaki,
−
krążki linowe i łańcuchowe,
−
bębny linowe,
−
zespoły unieruchomiająco-zabezpieczające: hamulce i zapadki,
−
koła jezdne.
Cięgna nośne są stosowane przede wszystkim w cięgnikach, tzn. we wciągnikach
i wciągarkach. Za pośrednictwem cięgien nośnych odbywa się podnoszenie i opuszczanie
ładunków. Najczęściej stosuje się liny stalowe, łańcuchy ogniwowe. Liny włókienne mają
ograniczone zastosowanie jako cięgna nośne ze względu na ich niewielką wytrzymałość.
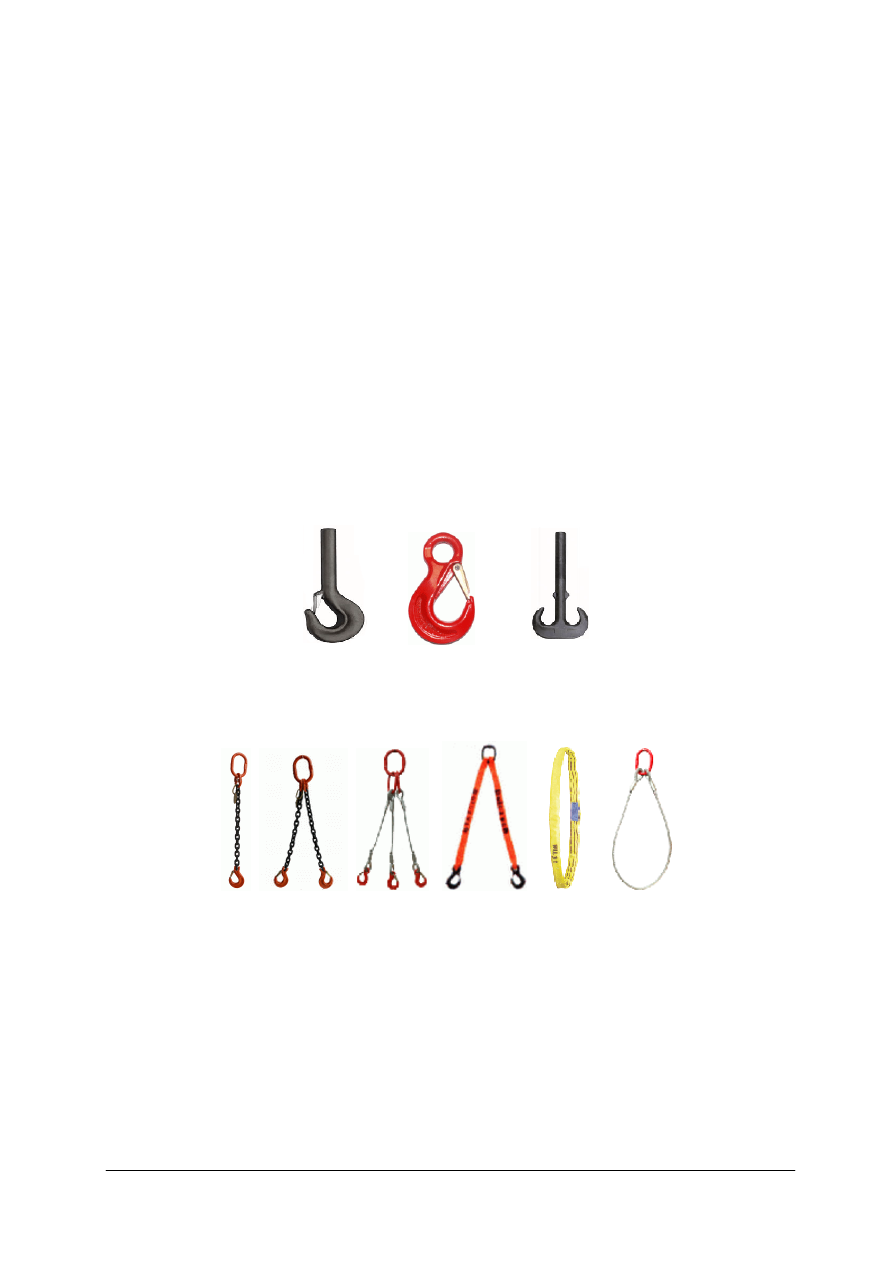
Budowa zespołów chwytających dźwignic zależy od rodzaju transportowanego ładunku.
Haki mogą chwytać ładunki bezpośrednio lub pośrednio. Ze względu na kształt rozróżnia się
haki jednorożne i dwurożne – rysunek 14.
a)
b)
c)
Rys. 14. Haki: a) jednorożny kuty z zabezpieczeniem, b) jednorożny z uchem , c) dwurożny kuty
Do łatwego i szybkiego zaczepiania ładunków na haku służą zawiesia lub pętle – rysunek 15.
a)
b)
c)
d)
e)
f)
Rys. 15. Zawiesia i pętle: a, b) zawiesie łańcuchowe, c) zawiesie linowe,
d) zawiesie pasowe, e) wężowe, f) pętla

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Odrębną grupę zespołów chwytających stanowią uchwyty i chwytaki. Uchwyty działają
na zasadzie tarcia i stosuje się je do transportu materiałów stałych. Chwytaki są przeznaczone
do transportu materiałów sypkich.
Bębny linowe i łańcuchowe są przeznaczone do nawijania cięgna nośnego i mają kształt
cylindryczny. Są to z reguły elementy napędzane, np. za pośrednictwem sprzęgła zębatego lub
za pomocą koła zębatego, a czasem także przez wał, na którym bęben jest osadzony.
Najczęściej stosowane są bębny rowkowe (rysunek 16), które na płaszczu mają rowek
śrubowy o kształcie dostosowanym do nawijanego cięgna. Powierzchnie bębnów są gładkie
lub rowkowane. Bębny z powierzchnią gładką są stosowane do lin włókiennych, a rowkowe
do lin stalowych.
Rys. 16. Bęben linowy
W dźwignicach z napędem elektrycznym zespołami unieruchamiającymi są hamulce.
Spośród wielu rodzajów hamulców mechanicznych najczęściej stosowane są hamulce
dwuszczękowe bębnowe. Przykładowe rozwiązanie konstrukcyjne hamulca dwuszczękowego
wraz z zwalniakiem elektromagnetycznym przedstawia rysunek 17.
Rys. 17. Hamulec dwuszczękowy bębnowy sprężynowy, luzowany zwalniakiem elektromagnetycznym
Hamulce dwuszczękowe są stosowane między innymi w mechanizmach podnoszenia oraz
w
mechanizmach
jazdy
przejezdnych
wciągarek
suwnic.
Rzadko
stosowanymi
w mechanizmach podnoszenia, jako hamulce wstrzymujące i zatrzymujące są hamulce
taśmowe. Jako zabezpieczenie przed ewentualnym i niepożądanym opuszczeniem ładunku
stosuje się mechanizmy zapadkowe. Mechanizm zapadkowy może być zębaty lub cierny.
Koła jezdne służą do przemieszczania mostów, suwnic, żurawi i innych dźwignic po
wyznaczonych torach. Najczęściej stosuje się koła o powierzchni walcowej z dwoma
obrzeżami, prowadzącymi je po szynach. Czasem powierzchnie te mają kształt stożkowy
w celu zabezpieczenia dużych ustrojów dźwigowych przed ukosowaniem. Koła jezdne
napędzane są poprzez zespół napędowy składający się z silnika elektrycznego, sprzęgła,
reduktora. Przykładowy mechanizm jazdy przedstawia rysunek 18.
Rys. 18. Zespół mechanizmu jazdy
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Mechanizmy dźwignic
Zadaniem mechanizmu dźwignicy jest przeniesienie napędu od silnika do członu
końcowego. Poszczególne mechanizmy najczęściej są napędzane indywidualnie, oddzielnymi
silnikami. Podstawowymi elementami i zespołami przenoszącymi napęd są: wały, przekładnie
zębate oraz sprzęgła nierozłączne. W dźwignicach podstawowymi mechanizmami są:
−
mechanizm podnoszenia,
−
mechanizm jazdy suwnicy,
−
mechanizm jazdy przejezdnej wciągarki suwnicy,
−
mechanizm obrotu żurawia.
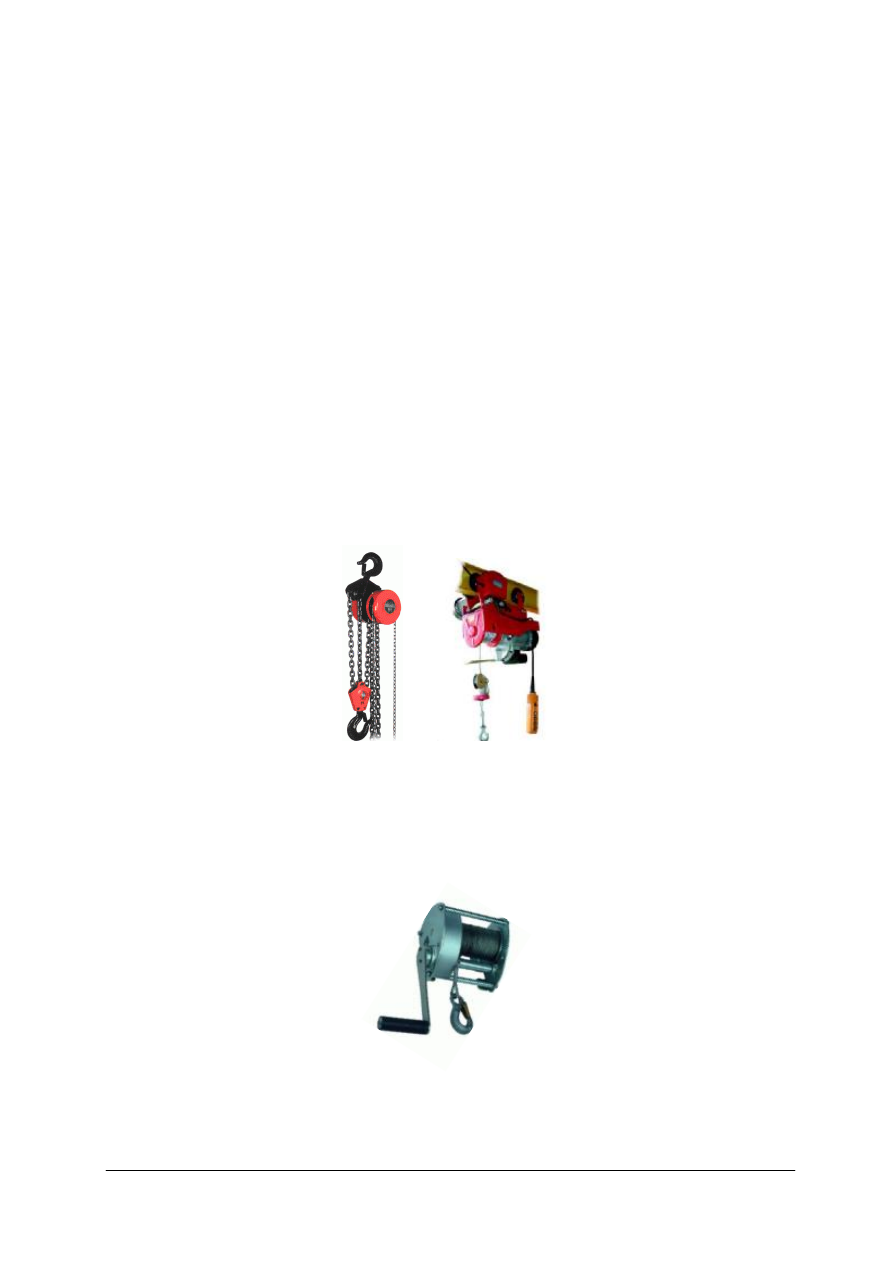
Cięgniki tworzą grupę dźwignic prostych służących do przeciągania lub podnoszenia
ładunków za pomocą cięgien linowych bądź łańcuchowych z zastosowaniem odpowiednich
zaczepów. Mogą być napędzane ręcznie lub silnikiem elektrycznym. Ze względu na ruch
nosiwa cięgniki dzielimy na:
−
wciągniki,
−
wciągarki.
Wciągnik składa się z mechanizmu podnoszenia, cięgnowego układu zawieszenia
ładunku oraz korpusu. Całość tworzy układ podwieszony, np. pod belką stropu. Wciągniki
mogą być stałe, przenośne lub przejezdne, z napędem ręcznym lub elektrycznym. Przykłady
wciągników przedstawia rysunek 19.
a)
b)
Rys. 19. Wciągnik: a) nieprzejezdny, b) przejezdny
Wciągarka składa się z mechanizmu podnoszenia, układu cięgnowego oraz ramy stałej,
przenośnej lub przejezdnej. Wciągarki mogą pracować jako przyścienne lub stojakowe, być
napędzane ręcznie lub elektrycznie. Wciągarkę linową z napędem ręcznym przedstawia
rysunek 20.
Rys. 20. Wciągarka linowa z napędem ręcznym
Suwnice są to dźwignice złożone z przemieszczającego się po torach ustroju nośnego
i poruszającego się po nim wciągnika lub wciągarki. Należą do najbardziej
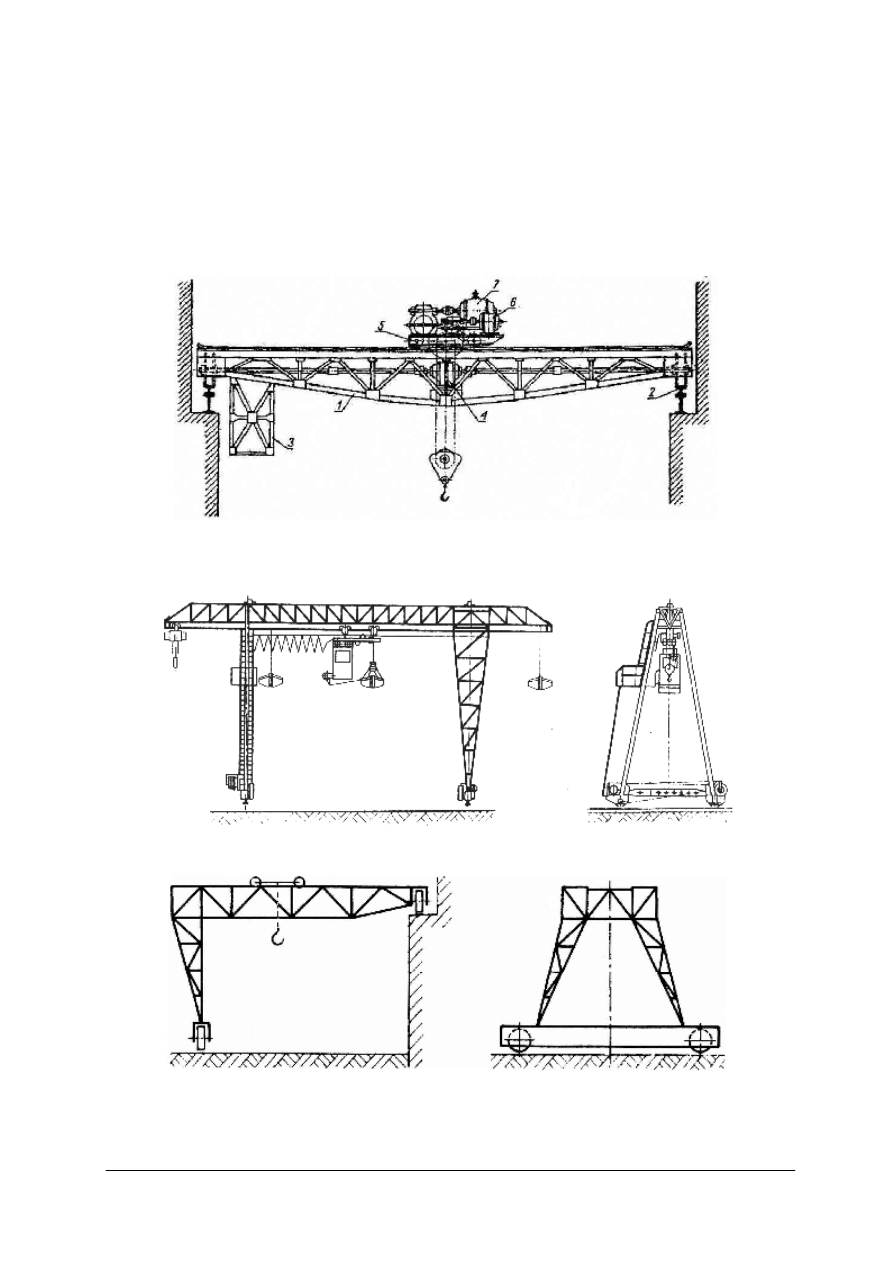
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
rozpowszechnionej grupy dźwignic, których zadaniem jest przenoszenie ładunków w obrębie
hali produkcyjnej lub pewnej ograniczonej przestrzeni otwartej. Poruszają się po torach
podpartych lub podwieszonych dzięki własnemu układowi napędowemu jazdy. W zależności
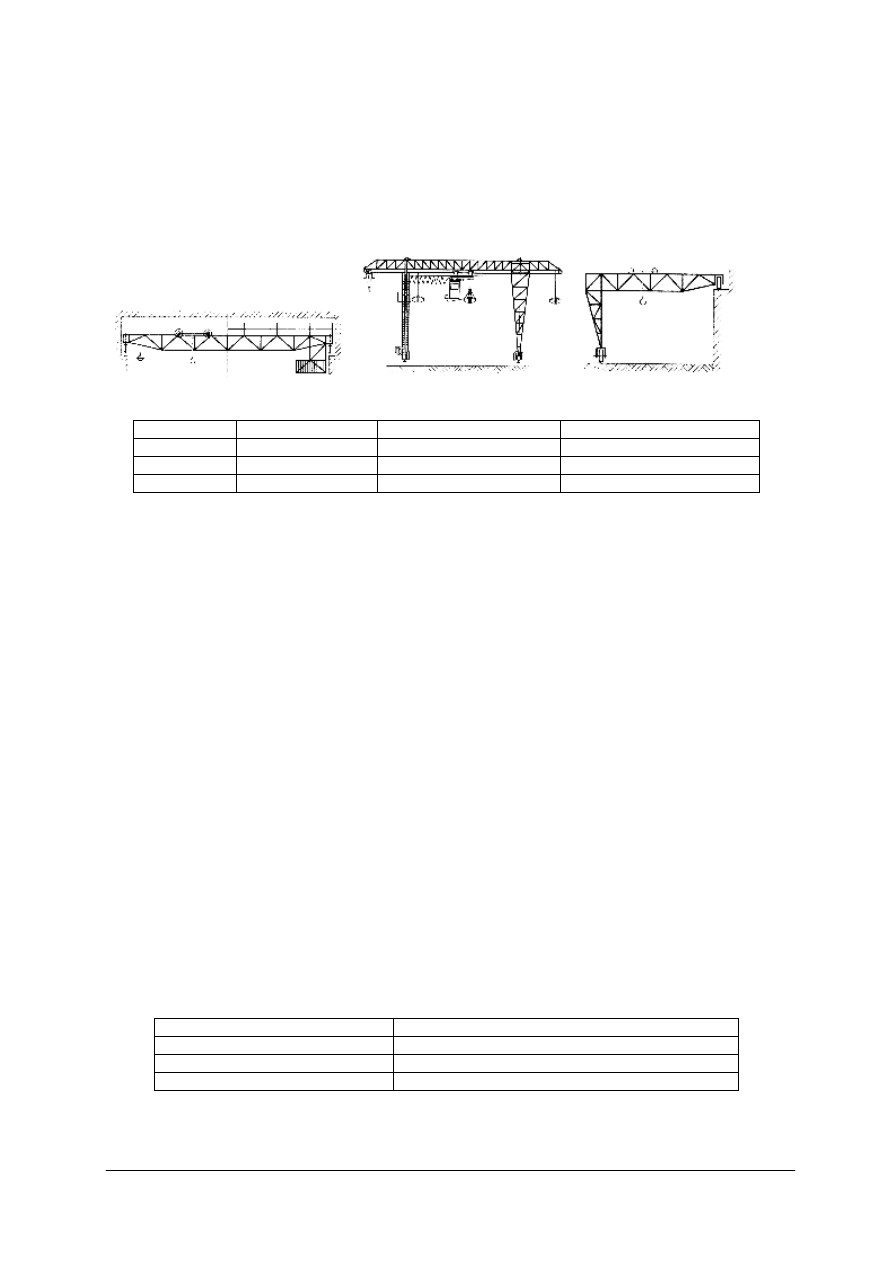
od konstrukcji ustroju nośnego suwnicy wyróżniamy:
−
pomostowe – rysunek 21,
−
bramowe – rysunek 22,
−
półbramowe – rysunek 23.
Rys. 21. Suwnica pomostowa: 1 – most, 2 – szyna jazdy suwnicy, 3 – kabina, 4 – silnik jazdy suwnicy,
5 – wózek, 6 – silnik jazdy wózka, 7 – silnik wciągarki [1, s. 127]
Rys. 22. Suwnica bramowa [1, s. 127]
Rys. 23. Suwnica półbramowa [1, s. 127]
Każda suwnica zawiera trzy mechanizmy: jazdy suwnicy, jazdy wózka oraz napęd
wciągnika do podnoszenia ładunków. Główny zespół, zwany mostem stanowi konstrukcję
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
wsporczą suwnicy. Na moście porusza się napędzany wózek wraz z wciągnikiem
wyposażonym w różne zespoły chwytające.
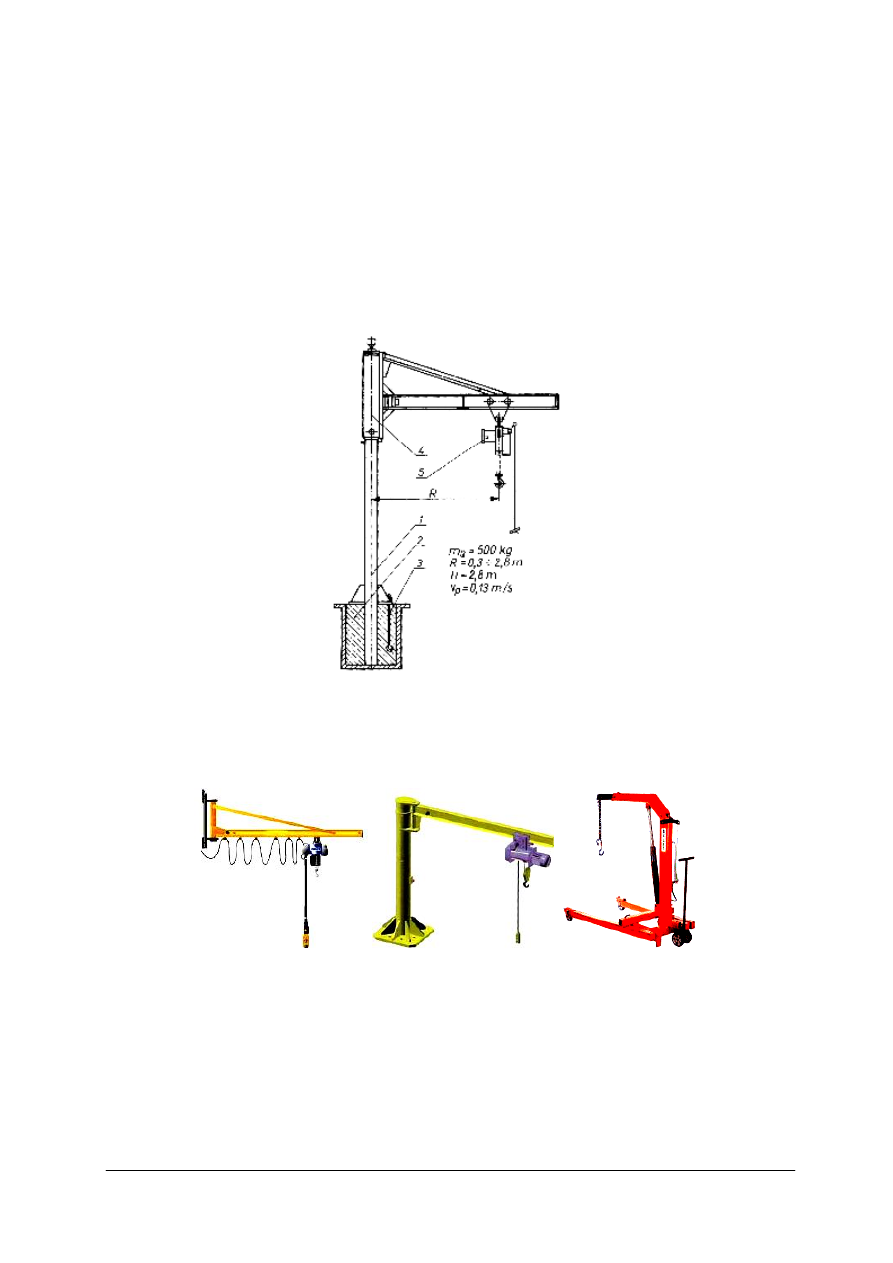
Żurawie stanowią pod względem częstotliwości zastosowania drugą po suwnicach grupę
dźwignic. Są to dźwignice, w których część konstrukcji nośnej, zwana wspornikiem może
wykonywać ruch obrotowy w płaszczyźnie poziomej, albo w poziomej i pionowej
jednocześnie, służące do przenoszenia ładunków w przestrzeni ograniczonej wysokością
podnoszenia i skrajnym zasięgiem wspornika. Istnieje wiele podziałów żurawi. Na przykład
ze względu na rodzaj napędu dzieli się je na ręczne i mechaniczne. Ze względu na cechy
konstrukcyjne można wyróżnić żurawie przyścienne, słupowe, itd. Żuraw stacjonarny
ze słupem stałym przedstawia rysunek 24.
Rys. 24. Żuraw stacjonarny ze słupem stałym: 1 – słup stały, 2 – fundament, 3 – kotwa, 4 – część obrotowa
w wysięgnikiem, 5 – wciągnik elektryczny, m
Q
– udźwig, R – wysięg, H – wysokość podnoszenia,
v
p
– prędkość podnoszenia [7, s. 94]
Najczęściej stosowane żurawie w praktyce warsztatowej przedstawia rysunek 25.
Rys. 25. Żurawie: przyścienny, słupowy, przewoźny z wysięgnikiem
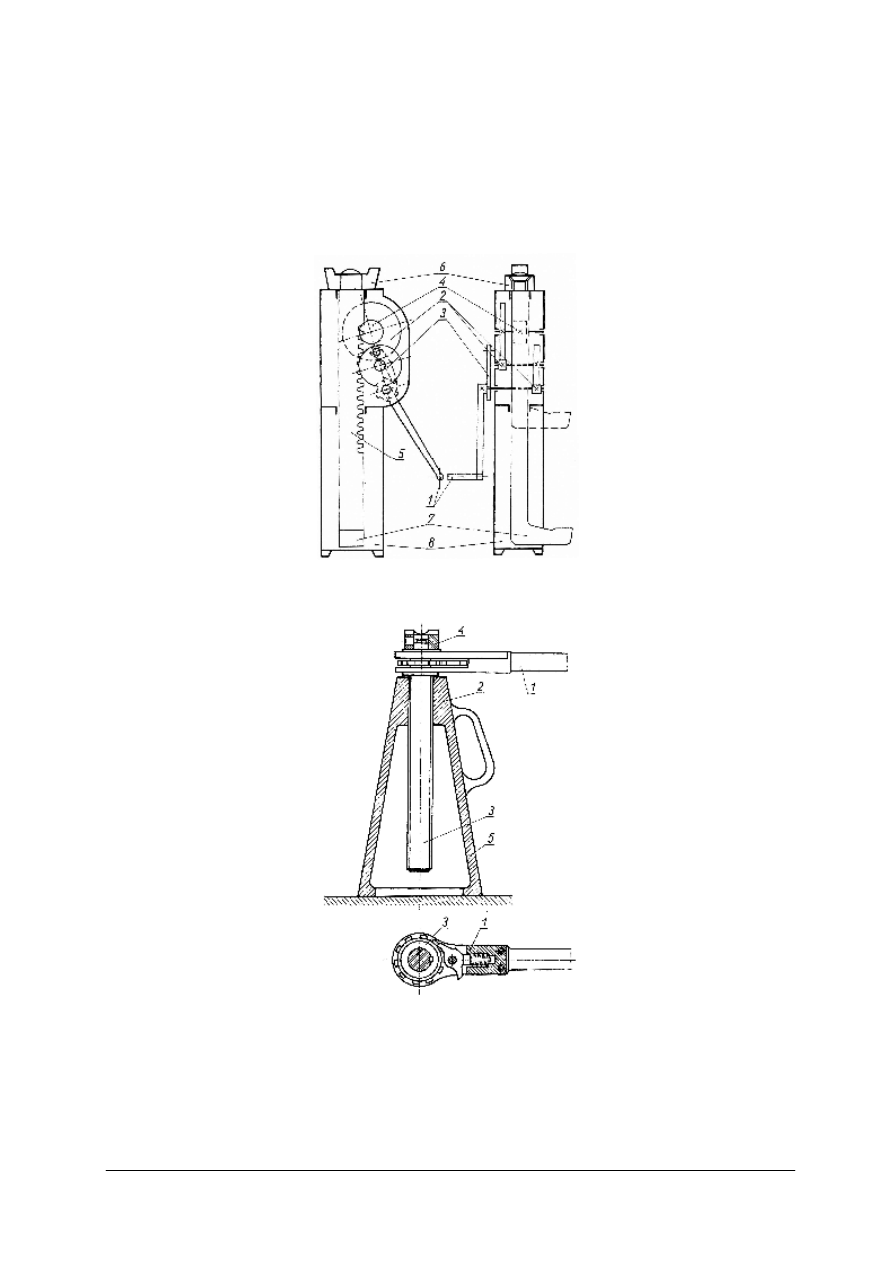
Dźwigniki tworzą najprostszą grupę dźwignic, przeznaczonych do podnoszenia ciężarów
na niewielką stosunkowo wysokość w kierunku pionowym lub zbliżonym do pionowego.
Działają one za pośrednictwem elementów sztywnych, jak: śruby, zębatki i tłoki.
Rozróżniamy następujące rodzaje dźwigników:
−
zębatkowe (rysunek 26), w których ładunek jest przemieszczany za pośrednictwem
zębatki,
−
śrubowe (rysunek 27), w których ładunek jest przemieszczany za pośrednictwem śruby
i nakrętki,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
−
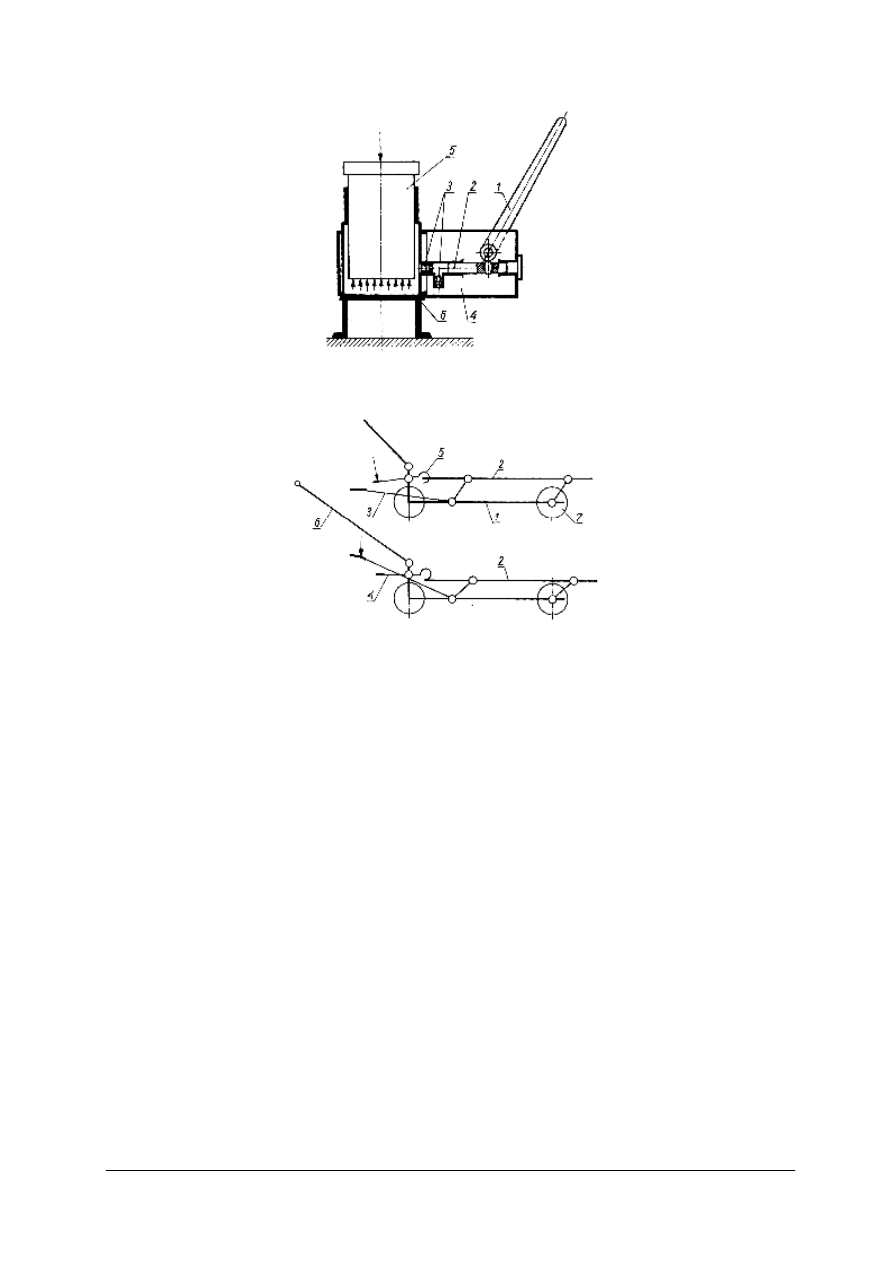
tłokowe (rysunek 28), w których ładunek jest przemieszczany za pośrednictwem tłoka
poruszanego ciśnieniem cieczy w dźwignikach tłokowych hydraulicznych lub ciśnieniem
powietrza w dźwignikach tłokowych pneumatycznych,
−
dźwigniowe (rysunek 29), w których ładunek jest przemieszczany za pośrednictwem
układu dźwigni, napędzanego za pomocą śruby albo układu hydraulicznego lub
pneumatycznego.
Rys. 26. Dźwignik zębatkowy: 1 – korba, 2 – przekładnie zębate, 3 – sprzęgło zapadkowe,
4 – zębnik, 5 – zębatka, 6 – głowica, 7 – łapa, 8 – korpus [7, s. 101]
Rys. 27. Dźwignik śrubowy: 1 – dźwignia z mechanizmem zapadkowym, 2 – nakrętka, 3 – śruba
samohamowna, 4 – głowica, 5 – korpus [7, s. 101]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 28. Dźwignik tłokowy hydrauliczny: 1 – dźwignia pompy olejowej, 2 – tłok pompy, 3 – zawory zwrotne,
4 – zbiornik oleju, 5 – tłok dźwignika z głowicą, 6 – cylinder dźwignika z podstawą [7, s. 102]
Rys. 29. Dźwignik dźwigniowy: 1 – wózek jezdniowy ręczny, 2 – platforma nośna, 3 – dźwignia nożna do
unoszenia i opuszczania platformy, 4 – dźwignia nożna do zaczepiania i odczepiania platformy,
5 – zaczepy, 6 – dyszel, 7 – koła jezdne wózka [7, s. 102]
Pozostałymi rodzajami dźwignic, z którymi możesz spotkać się w praktyce zawodowej
są: układnice, wyciągi towarowe, dźwignice linotorowe.
Wymagania dla operatorów i konserwatorów dźwignic
Zgodnie z polskim prawem kandydat na operatora musi spełniać następujące warunki:
−
mieć ukończone 18 lat,
−
wykazać się aktualnym świadectwem lekarskim stwierdzającym dobry stan zdrowia,
−
mieć odpowiednie wykształcenie i praktykę.
Uprawnienia dla operatorów dźwignic dzielą się na kategorie I, II, III oraz podkategorie
oznaczane literami w zależności od grupy dźwignic, do których się odnoszą:
−
W – obsługa wciągników, wciągarek i podestów ruchomych,
−
S – obsługa suwnic, układnic magazynowych i dźwignic linotorowych,
−
Ż – obsługa żurawi.
Osoby prowadzący prace konserwacyjno - remontowe powinni posiadać:
−
uprawnienia wydane przez Inspektorat Dozoru Technicznego właściwej dla kategorii
konserwowanych, przeglądanych lub remontowanych dźwignic,
−
zaświadczenie kwalifikacyjne dla osób zatrudnionych przy eksploatacji urządzeń
elektroenergetycznych (E).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Akty prawne dotyczące dźwignic
−
Ustawa z dnia 21 grudnia 2000 r. o dozorze technicznym (Dz. U. Nr 122, poz. 1321), ze
zmianami opublikowanymi w Dz. U. z 2002 r. Nr 74, poz. 676 i Dz. U. z 2004 r. Nr 96,
poz. 959.
−
Rozporządzenie Rady Ministrów z dnia 16 lipca 2002 r. w sprawie rodzajów urządzeń
technicznych podlegających dozorowi technicznemu (Dz. U. Nr 120, poz. 1021) tekst
jednolity uwzględniający zmiany wprowadzone rozporządzeniem opublikowanym
w Dz. U. z 2003 r. Nr 28, poz. 240), wydane na podstawie art. 5 ust. 2 ustawy o dozorze
technicznym.
−
Rozporządzenie Ministra Gospodarki z dnia 18 lipca 2001 r. w sprawie trybu sprawdzania
kwalifikacji wymaganych przy obsłudze i konserwacji urządzeń technicznych (Dz. U. Nr
79, poz. 849) tekst jednolity uwzględniający zmiany wprowadzone rozporządzeniem
opublikowanym w Dz. U. z 2003 r. Nr 50, poz. 426), wydane na podstawie art. 23 ust. 5
ustawy o dozorze technicznym.
Wózki transportowe są to środki transportu jezdniowego lub szynowego o ruchu
przerywanym i ograniczonym zasięgu, służące do przemieszczania poziomego i pionowego
ładunków pojedynczych bądź łączone w jednostki ładunkowe oraz materiałów sypkich
umieszczonych w odpowiednich pojemnikach.
Wózki transportowe dzielimy na: wózki jezdniowe ręczne i doczepne, wózki jezdniowe
napędzane, wózki szynowe.
W transporcie wewnątrzzakładowym główne
zastosowanie mają wózki jezdniowe.
Stosuje się je do przewożenia ładunków po jezdniach dróg i hal w zakładach przemysłowych,
w magazynach.
Wózki jezdniowe dzielimy na: naładowne, podnośnikowe, unoszące, ciągnikowe.
W zależności od sposobu kierowania wózki jezdniowe dzieli się na: prowadzone, podestowe,
z fotelem dla kierowcy.
Ze względu na rodzaj napędu wózki jezdniowe napędzane dzielimy na: wózki z napędem
elektrycznym
akumulatorowym,
wózki
z
napędem
spalinowym
niskoprężnym;
wysokoprężnym i gazowym, wózki z napędem pneumatycznym. Przykłady wózków
transportowych przedstawia rysunek 30.
Rys. 30. Przykłady wózków transportowych: a) naładowny platformowy elektryczny, b) podnośnikowy widłowy
spalinowy, c) unoszący ręczny
Uprawnienie do kierowania wózkiem jezdniowym
Operatorzy wózków jezdniowych muszą mieć kwalifikacje uprawniające do kierowania
tymi pojazdami, zgodnie z Rozporządzeniem Ministra Gospodarki z dnia 10 maja 2002 r.
w sprawie bezpieczeństwa i higieny pracy przy eksploatacji wózków jezdniowych z napędem
silnikowym (Dz. U. Nr 70, poz. 650).
Wymagania Dozoru Technicznego
Rada Ministrów rozporządzeniem z dnia 16 lipca 2002 r. w sprawie urządzeń
technicznych podlegających dozorowi technicznemu (Dz. U. Nr 120, poz. 1021) włączyła
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
wózki jezdniowe podnośnikowe z mechanicznym napędem podnoszenia pod dozór Urzędu
Dozoru Technicznego. UDT przeprowadza trzy rodzaje badań technicznych: badania
odbiorcze, okresowe i doraźne. Pełnemu badaniu dozoru technicznego, przeprowadzanemu co
rok podlegają wózki jezdniowe z wysięgnikiem, z osobą obsługującą podnoszoną wraz
z ładunkiem oraz wózki jezdniowe podnośnikowe podestowe lub z siedziskiem dla operatora.
Natomiast podnośniki prowadzone i zdalnie sterowane podlegają badaniu ograniczonemu co
dwa lata.
Przenośniki to urządzenia transportowe o zasięgu ograniczonym, służące do
przenoszenia ładunków w sposób ciągły. Przenośniki odznaczają się niewielką masą własną
w stosunku do wydajności, małym zapotrzebowaniem mocy, prostą konstrukcją oraz
pewnością eksploatacji. Warunkiem ciągłości pracy przenośnika jest stałe i równomierne jego
zasilanie materiałem przenoszonym.
Istnieje wiele rozwiązań konstrukcyjnych przenośników, co jest wynikiem dostosowania
ich do warunków pracy i rodzaju przenoszonego materiału.
Ze względu na cechy konstrukcyjne przenośniki dzieli się na:
−
cięgnowe,
−
bezcięgnowe,
−
przenośniki z ośrodkiem pośredniczącym (transport w strumieniu gazu lub cieczy).
Przenośniki cięgnowe
W przenośnikach cięgnowych transport materiałów odbywa się za pośrednictwem cięgna,
którym może być taśma, łańcuch lub lina. Materiał może być przenoszony bezpośrednio przez
cięgno lub za pomocą elementów przymocowanych do cięgna.
Rozróżnia się przenośniki cięgnowe: taśmowe, podwieszane, członowe, kubełkowe,
zabierakowe.
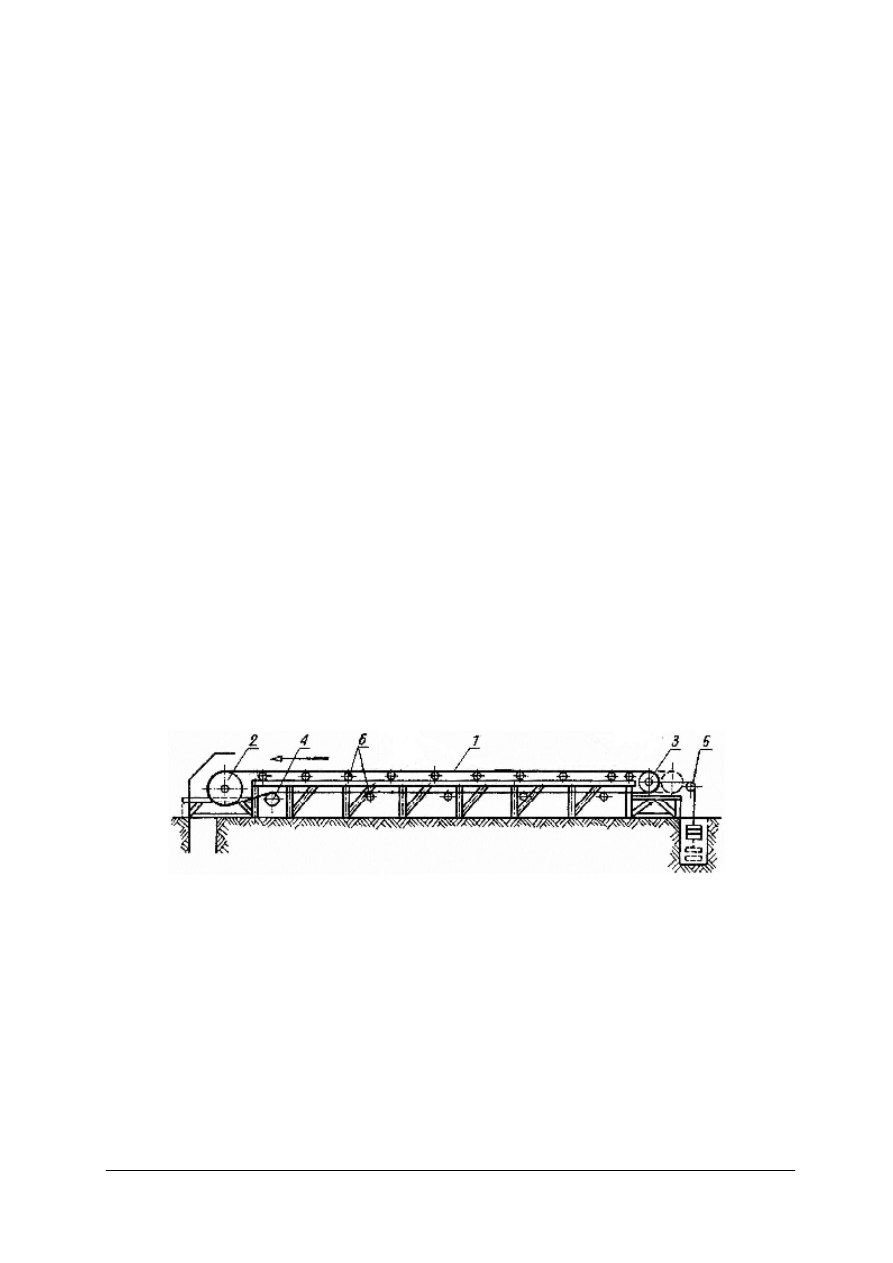
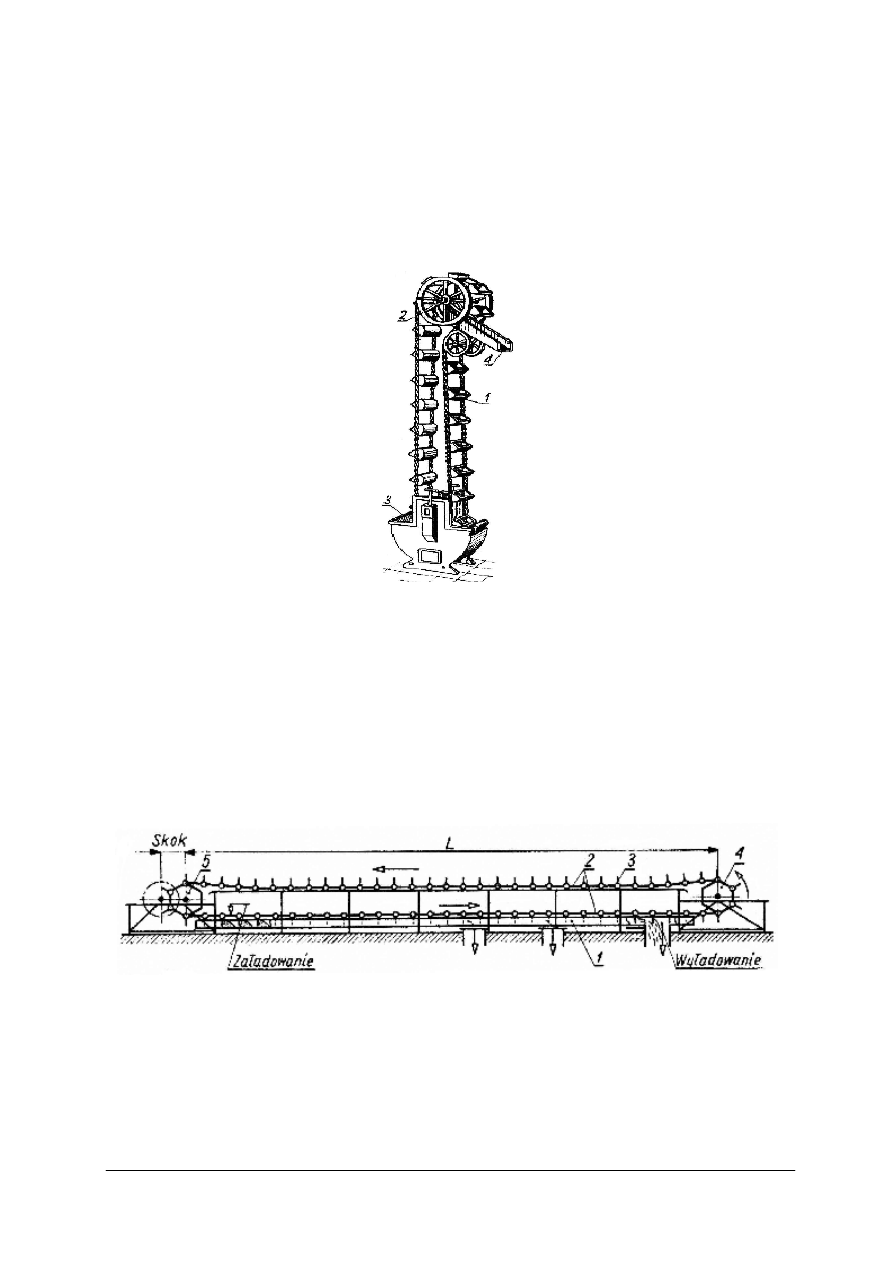
Przenośniki taśmowe należą do najbardziej wydajnych, ponieważ przenoszenie
materiałów odbywa się nieprzerwanym strumieniem. Przenośniki te służą do przenoszenia
materiałów zarówno sypkich, jak i kawałkowych oraz drobnicy. Znalazły one także
zastosowanie w procesach technologicznych jako przenośniki montażowe. Schemat
przenośnika taśmowego przedstawia rysunek 31.
Rys. 31. Schemat przenośnika taśmowego stałego: 1- taśma transportowa, 2 - bęben napędowy, 3 - bęben
napinający, 4 - bęben kierujący, 5 - mechanizm napinający, 6 - wałki podtrzymujące [10, s. 118]
Transport nosiwa z reguły odbywa się w poziomie, może odbywać się również z pewnym
nachyleniem do poziomu (max 30
0
) zależnym od rodzaju materiału. Taśma przenośnika
(PCV, tekstylno-gumowa, siatkowa, stalowa) przewija się przez bęben napędowy
i napinający, niosąc na sobie materiał. Zależnie od ustawienia wałków podtrzymujących
taśma w biegu obciążonym może przyjmować kształt płaski lub nieckowy. Bieg dolny (nie
obciążony) taśmy zawsze pozostaje płaski. Przenoszenie nosiwa w kierunku pochyłym jest
możliwe dopiero po odpowiednim ukształtowaniu przenośnika. Dla utrzymania stałego
napięcia taśmy stosowane są mechanizmy naciągowe (śrubowe; ciężarkowe środkowe lub
końcowe). Napięta taśma jest sprzęgnięta ciernie z bębnem napędowym, który obracając się
przewija taśmę po zestawach rolek górnych, dolnych oraz bębnach kierujących.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Przenośniki podwieszane składają się z podwieszonego toru, wózków z podwieszkami
i łańcucha napędowego. Pod względem konstrukcji rozróżnia się dwa podstawowe rodzaje
przenośników podwieszonych: jedno- i dwutorowe. Torem jest najczęściej dwuteowa belka
przymocowana do konstrukcji budynku lub zawieszona na specjalnych konstrukcjach
ustawionych na fundamentach i prowadzona w różnych kierunkach, co jest uzależnione od
potrzeb produkcji. Wózki są doczepione do łańcucha o obwodzie zamkniętym, napędzanego
za pomocą jednego lub kilku kół łańcuchowych. W miejscu zmiany kierunku toru
umieszczane są koła łańcuchowe kierujące. Fragment przenośnika podwieszonego
przedstawia rysunek 32.
Rys. 32. Fragment przenośnika podwieszonego [10, s. 119]
Przenośniki podwieszone stanowią bardzo dogodny i jeden z najbardziej
rozpowszechnionych środków transportu międzyoperacyjnego w produkcji potokowej oraz
transportu części i zespołów do głównych linii montażowych.
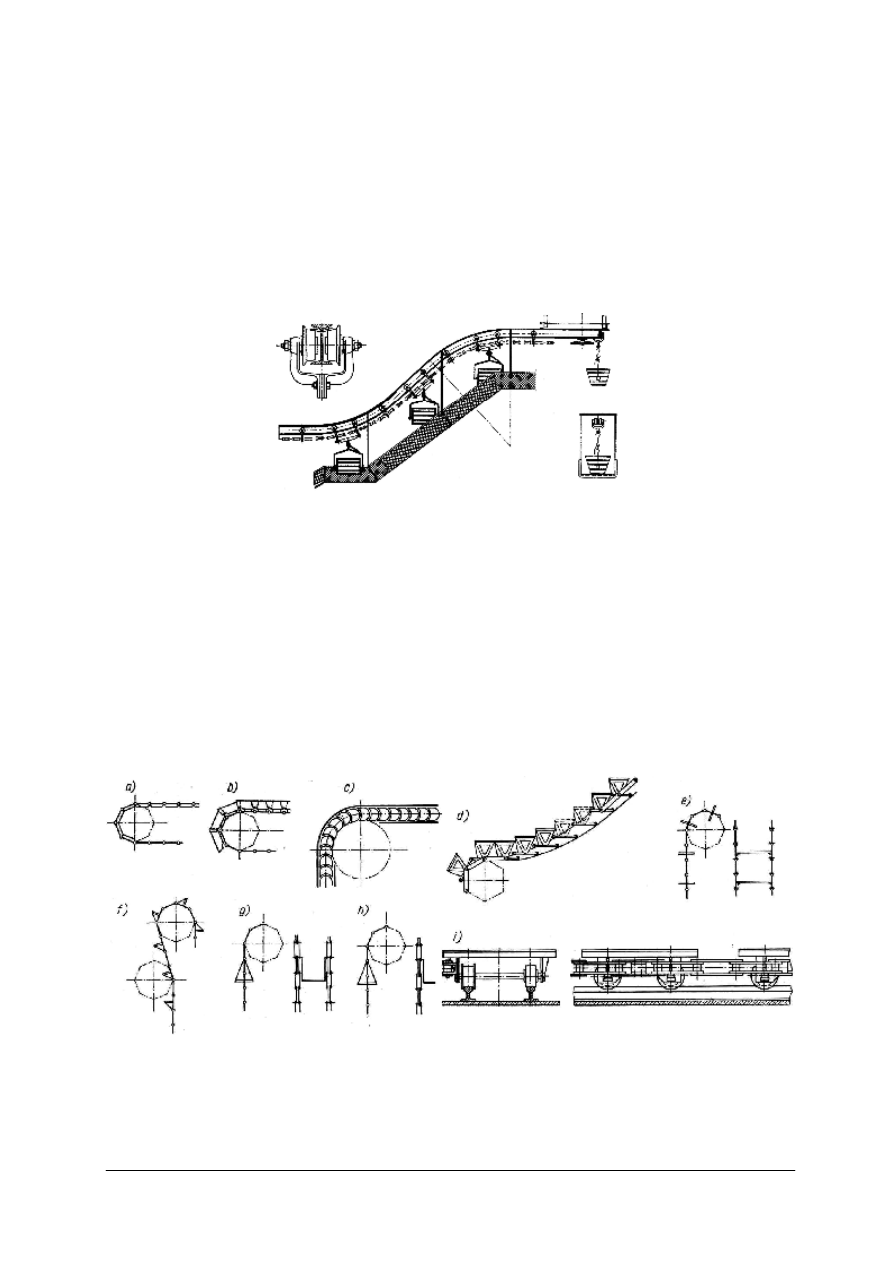
Przenośniki członowe stanowią drugą pod względem częstości stosowania grupę
przenośników. Przemieszczają one materiały luzem lub w postaci ładunków na odpowiednio
ukształtowanych członach, połączonych w jeden obwód pojedynczym lub podwójnym
cięgnem (zwykle łańcuchowym) przewijającym się przez bęben napędowy i napinający.
Zależnie od przeznaczenia dzieli się je na płytowe i korytowe. Podobne do przenośników
płytowych są przenośniki wózkowe, w których członem nośnym jest nie łańcuch, lecz wózki
przytwierdzone w pewnych odstępach do łańcucha, o ruchu prostym lub okrężnym. Schematy
przenośników członowych przedstawia rysunek 33.
Rys. 33. Schematy przenośników członowych: a) płytowego prostego, b) korytowego, c) płytowego okrężnego,
d) schodkowego, e, f) pionowego zwanego półkowym, g, h) kołyskowego, i) wózkowego [10, s. 113]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Przenośniki członowe mają urządzenie napinające podobne do stosowanego
w przenośnikach taśmowych. Bęben napinający jest tu zastąpiony kołami łańcuchowymi
napinającymi.
Przenośniki kubełkowe stanowią grupę przenośników służących do transportu
materiałów ziarnistych w kierunku pionowym i pochyłym. Tworzą je zespoły kubełków
przymocowanych sztywno lub przegubowo do cięgien. Schemat przenośnika kubełkowego
przedstawia rysunek 34.
Rys. 34. Schemat przenośnika kubełkowego: 1 – łańcuch z kubełkami, 2 – koło napędowe, 3 – kosz zasypowy,
4 – koryto zsypowe [10, s. 113]
Materiał pobrany przez kubełek w wyniku czerpania lub zasypywania jest podnoszony do
głowicy i wysypywany na skutek działania siły odśrodkowej lub grawitacyjnej, lub obu tych
sił.
Przenośniki zabierakowe są to urządzenia, które przenoszą nosiwo przez przesuwanie
go za pomocą cięgna zaopatrzonego w zabieraki. Zagarniany materiał może leżeć
w nieruchomym korycie lub zamkniętej rynnie. Zależnie od konstrukcji elementów
zgarniających rozróżnia się przenośniki zabierakowe: zgrzebłowe, rynnowe i talerzowe.
Schemat przenośnika zabierakowego zgrzebłowego przedstawia rysunek 35.
Rys. 35. Schemat przenośnika zabierakowego zgrzebłowego: 1 – koryto, 2 – łańcuch, 3 – zgrzebło, 4 – koło
napędowe, 5 – koło napinające[10, s. 115]
Przenośniki zabierakowe mogą być zasilane i wyładowywane w dowolnych miejscach na
całej długości koryta czy rynny, jeśli zostaną w nich odpowiednio rozmieszczone otwory
zasypowe lub wysypowe. Przenośniki zabierakowe mogą pracować nie tylko w kierunku
poziomym, ale również nachylonym, a w przypadku koryta zamkniętego – pionowym.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Przenośniki bezcięgnowe
W przenośnikach bezcięgnowych transport materiałów odbywa się nie za pośrednictwem
cięgna, lecz przy użyciu innego elementu konstrukcyjnego.
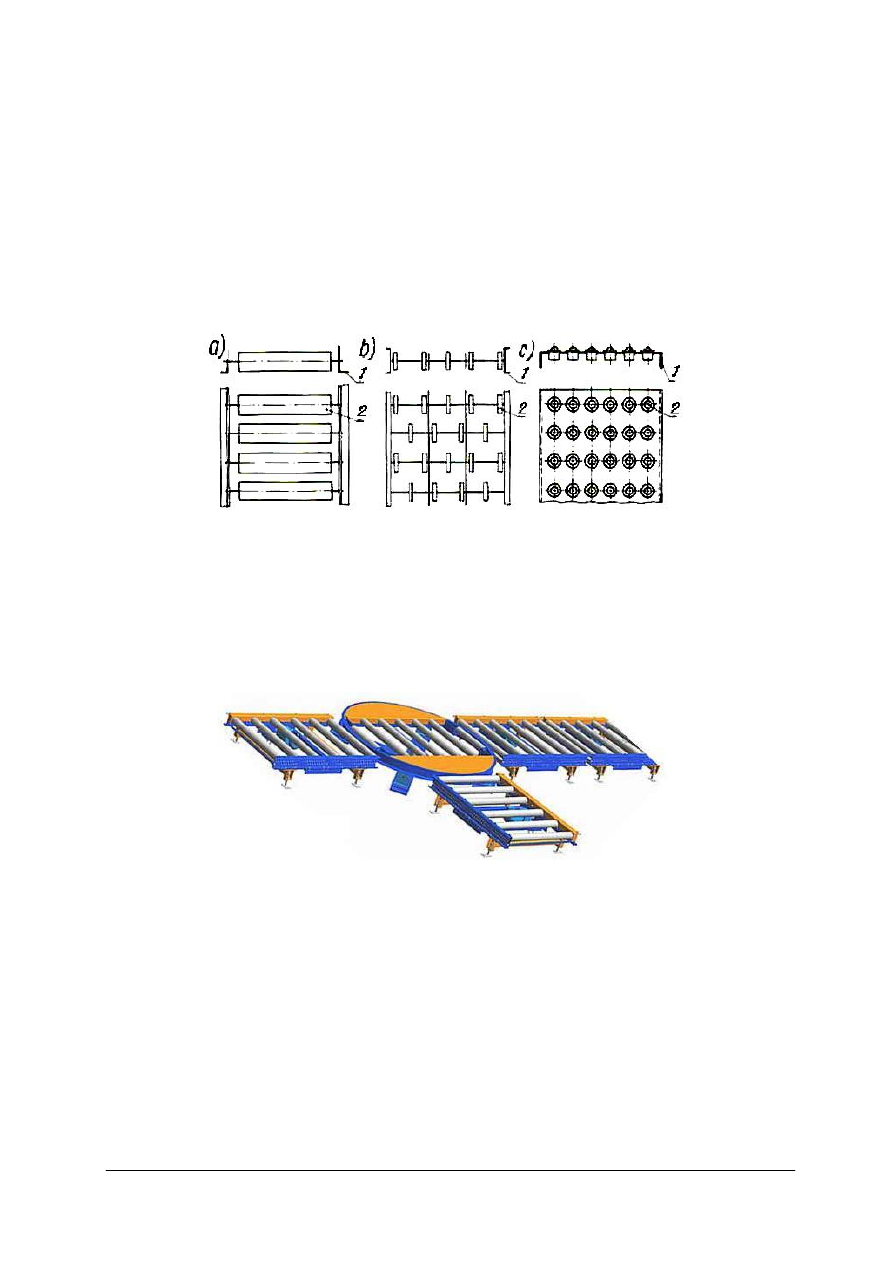
Rozróżnia się przenośniki bezcięgnowe: impulsowe i grawitacyjne, wałkowe, śrubowe,
wstrząsowe.
Przenośniki impulsowe i grawitacyjne są to jedne z najprostszych środków transportu,
które przenoszą nosiwo pod działaniem siły ciężkości po bieżniach pochyłych lub też pod
wpływem okresowo powtarzających się impulsów ręcznych lub mechanicznych, po bieżniach
poziomych. Należą do nich przenośniki nie napędzane: wałkowe, krążkowe, kulowe.
Schematy przenośników impulsowych i grawitacyjnych przedstawia rysunek 36.
Rys. 36. Schematy przenośników impulsowych i grawitacyjnych: a) wałkowy, b) krążkowy, c) kulkowy:
1 – rama przenośnika, 2 – element nośny [10, s. 115]
Przenośniki impulsowe i grawitacyjne stosowane są w magazynach, miejscach
przeładunku, w transporcie międzyoperacyjnym i przy montażu do przemieszczania
ładunków jednostkowych.
Przenośniki wałkowe (rysunek 37), zwane także bieżniami rolkowymi, składają się
z ramy wspartej na stojakach i zamocowanych w niej obrotowo wałków, które są napędzane.
Rys. 37. Przenośnik wałkowy wraz z obrotnicą
Do zmiany kierunku ruchu ładunków w miejscach przecięcia się dwóch przenośników
stosuje się obrotnice. Przenośniki wałkowe stosowane są do transportu jednostkowych
ładunków w postaci brył, np. korpusów urządzeń w procesie technologicznym.
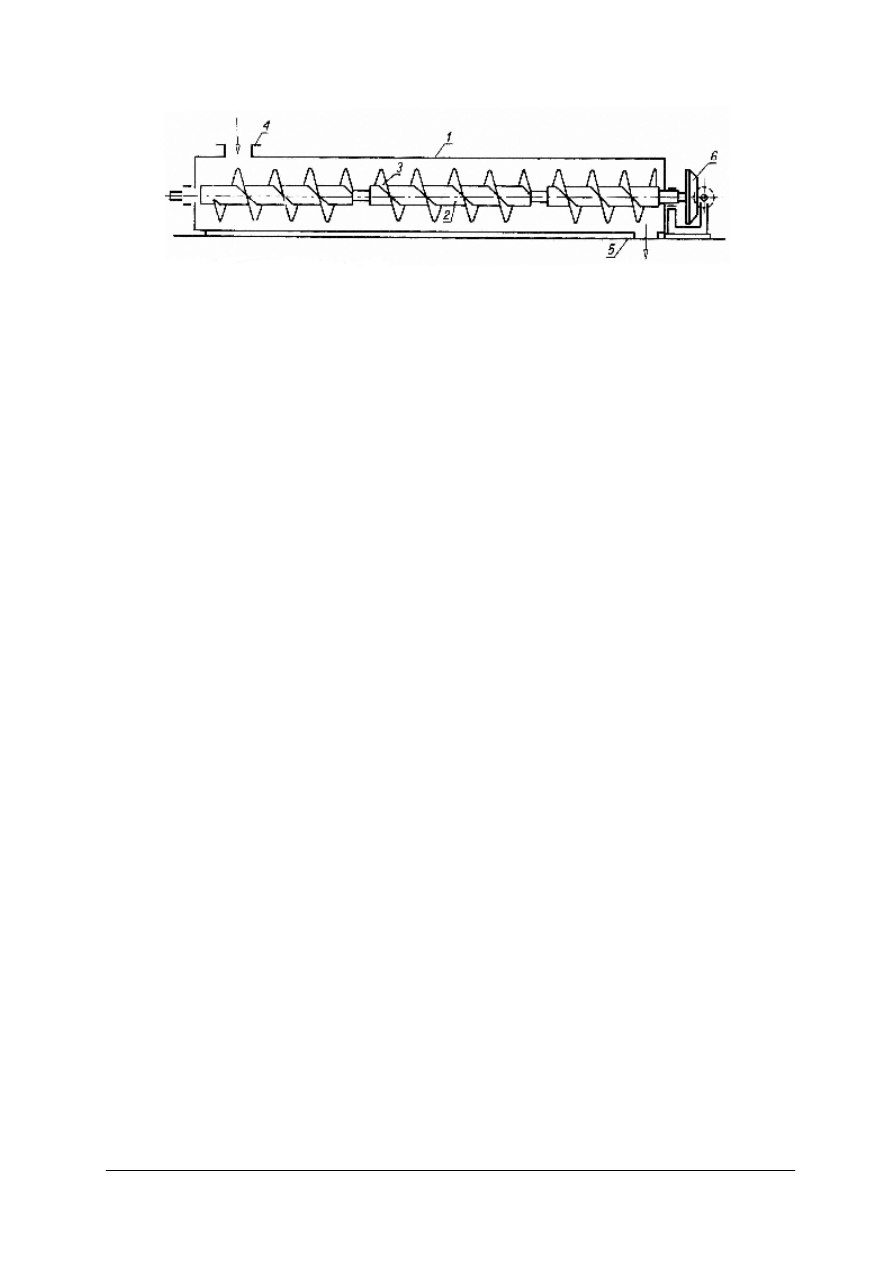
Przenośniki śrubowe, zwane także ślimakowymi są przeznaczone do transportu
materiałów sypkich. Służą do transportu poziomego, pionowego i pochyłego. Działanie
przenośników śrubowych polega na przemieszczaniu materiałów luzem za pośrednictwem
powierzchni śrubowej obracającej się wokół własnej osi. Schemat przenośnika śrubowego
przedstawia rysunek 38.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Rys. 38. Schemat przenośnika śrubowego: 1 – koryto, 2 – wał, 3 – człon śrubowy, 4 – kosz zasypowy, 5 – lej
wylotowy, 6 – napęd [1, s. 136]
Przenośniki wstrząsowe, są to przenośniki przemieszczające materiały luzem pod
działaniem ruchów wahliwych lub drgań rynny. Rozróżnia się:
−
przenośniki wstrząsowe o częstotliwości ruchów 0.7 do 7Hz i amplitudzie 20 do 150 mm,
−
przenośniki wibracyjne o częstotliwości drgań 7 do 50Hz i amplitudzie 0,5 do 15 mm.
Rynny przenośników wstrząsowych są wprowadzane w ruch postępowo-zwrotny za pomocą
np. mechanizmu korbowego, a także pneumatycznie lub hydraulicznie. Wzbudzenie drgań
w
przenośnikach
wibracyjnych
odbywa
się
za
pośrednictwem
mechanizmu
elektromagnetycznego, elektromechanicznego, mimośrodowego.
Przenośniki z czynnikiem pośrednim to urządzenia do transportu materiałów
strumieniu gazu lub cieczy. Rozróżnia się przenośniki pneumatyczne i hydrauliczne.
Magazyny służą do przyjmowania, składowania oraz wydawania różnorakich materiałów
surowcowych, półfabrykatów, materiałów pomocniczych, paliw, i wyrobów gotowych.
Rozróżnia się magazyny: otwarte, półotwarte, zamknięte i specjalne.
Magazyny otwarte, zwane inaczej placami składowymi, to wydzielone na terenie zakładu
powierzchnie, na których gromadzi się i przechowuje najczęściej duże ilości materiałów np.
sypkich. Do magazynów otwartych należą także pomosty kolejowe, rampy.
Magazyny półotwarte to wszelkiego rodzaju szopy i wiaty zadaszone, na ogół bez ścian
lub niekiedy ze ścianami z dwóch albo trzech stron.
Magazyny zamknięte są to jedno-, dwu- lub kilku piętrowe budynki, do których
dochodzą zarówno drogi ruchu kołowego, jak i tory kolejowe.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie wyróżnia się dźwignice stosowane do transportu bliskiego?
2. Z jakich podstawowych zespołów i elementów składają się dźwignice?
3. Jakie wyróżnia się rodzaje suwnic i gdzie się je wykorzystuje?
4. Jakie znasz rodzaje dźwigników i jakie parametry techniczne je charakteryzują?
5. Jakie są wyróżnia się rodzaje wózków transportowych i jakie parametry je
charakteryzują?
6. Jakie uprawnienia powinni posiadać kierujący wózkami jezdniowymi?
7. Jakie zasady obowiązują przy obsłudze wózków transportowych?
8. Jakie wyróżnia się rodzaje przenośników?
9. Jakie elementy składowe występują w przenośnikach cięgnowych i bezcięgnowych?
10. Gdzie znajdują zastosowanie przenośniki cięgnowe i bezcięgnowe?
11. Jakie przenośniki wykorzystuje się do transportu międzyoperacyjnego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
4.3.3. Ćwiczenia
Ćwiczenie 1
Na poniższych rysunkach przedstawiono suwnice. Określ rodzaj suwnic, wskaż
podstawowe mechanizmy, podaj przykłady zastosowania każdej z nich. Wykorzystaj
załączoną tabelę.
1
2
3
Nr rysunku
Rodzaj suwnicy
Mechanizmy suwnicy
Przykłady zastosowania
1
2
3
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami suwnic, określić ich zastosowanie,
2) rozpoznać suwnice na rysunkach,
3) rozpoznać mechanizmy suwnic,
4) wpisać nazwy suwnic do tabeli, odpowiednio podać występujące w nich mechanizmy
i przykłady zastosowania,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia,
−
przybory do pisania,
−
katalogi urządzeń transportowych,
−
plansze przedstawiające urządzenia transportowe,
−
poradnik mechanika,
−
literatura z rozdziału 6.
Ćwiczenie 2
Dobierz odpowiedni rodzaj dźwignicy do podnoszenia ciężarów. Urządzeniu stawiane są
następujące wymagania: udźwig 1kN, wysokość podnoszenia 150 mm, możliwość przesuwu
poziomego 100 mm.
Rodzaj dźwignicy
Udźwig [kN]
Wysokość podnoszenia [mm]
Przesuw poziomy [mm]
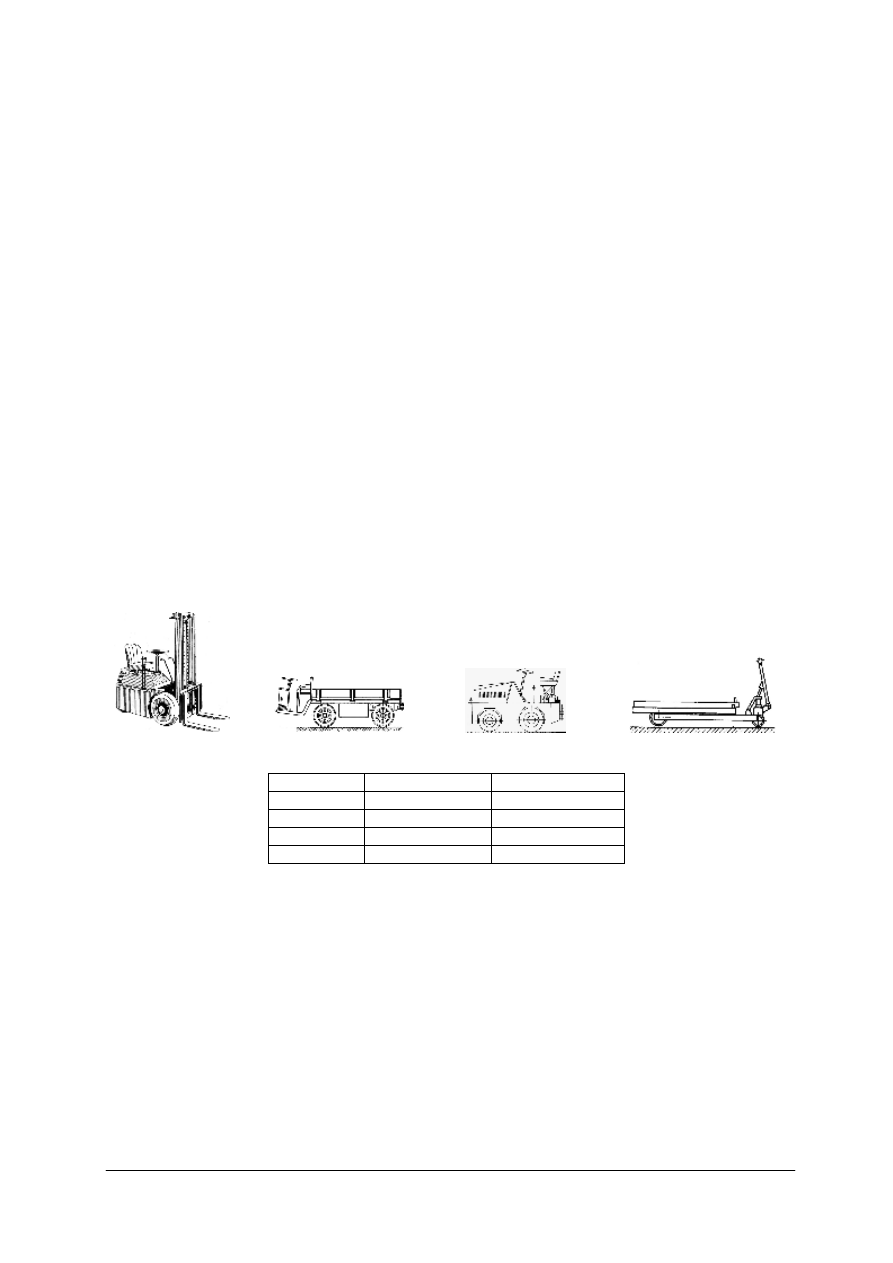
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami dźwignic,
2) wyszukać strony www z ofertami dźwignic,
3) dokonać analizy wybranych dźwignic,
4) wybrać dźwignicę umożliwiające podnoszenie ładunku z wymaganiami zapisanymi
w treści ćwiczenia,
5) wpisać dane wybranej dźwignicy do tabelki,
6) zaprezentować efekty swojej pracy,
7) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia,
−
przybory do pisania,
−
katalogi ofertowe dźwignic,
−
stanowisko komputerowe z dostępem do Internetu,
−
poradnik mechanika,
−
literatura z rozdziału 6.
Ćwiczenie 3
Dobierz nazwy do wózków transportowych przedstawionych na rysunkach, określ rodzaj
napędu. Dobrane określenia zapisz w tabeli.
1
2
3
4
Nr wózka
Rodzaj wózka
Rodzaj napędu
1
2
3
4
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami wózków transportowych,
2) zapoznać się z rodzajami napędów stosowanych w wózkach jezdniowych,
3) nadać nazwy wózkom przedstawionym na rysunkach,
4) uzupełnić odpowiednio tabelę, wpisując nazwy wózków i rodzaj napędu,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia,
−
przybory do pisania,
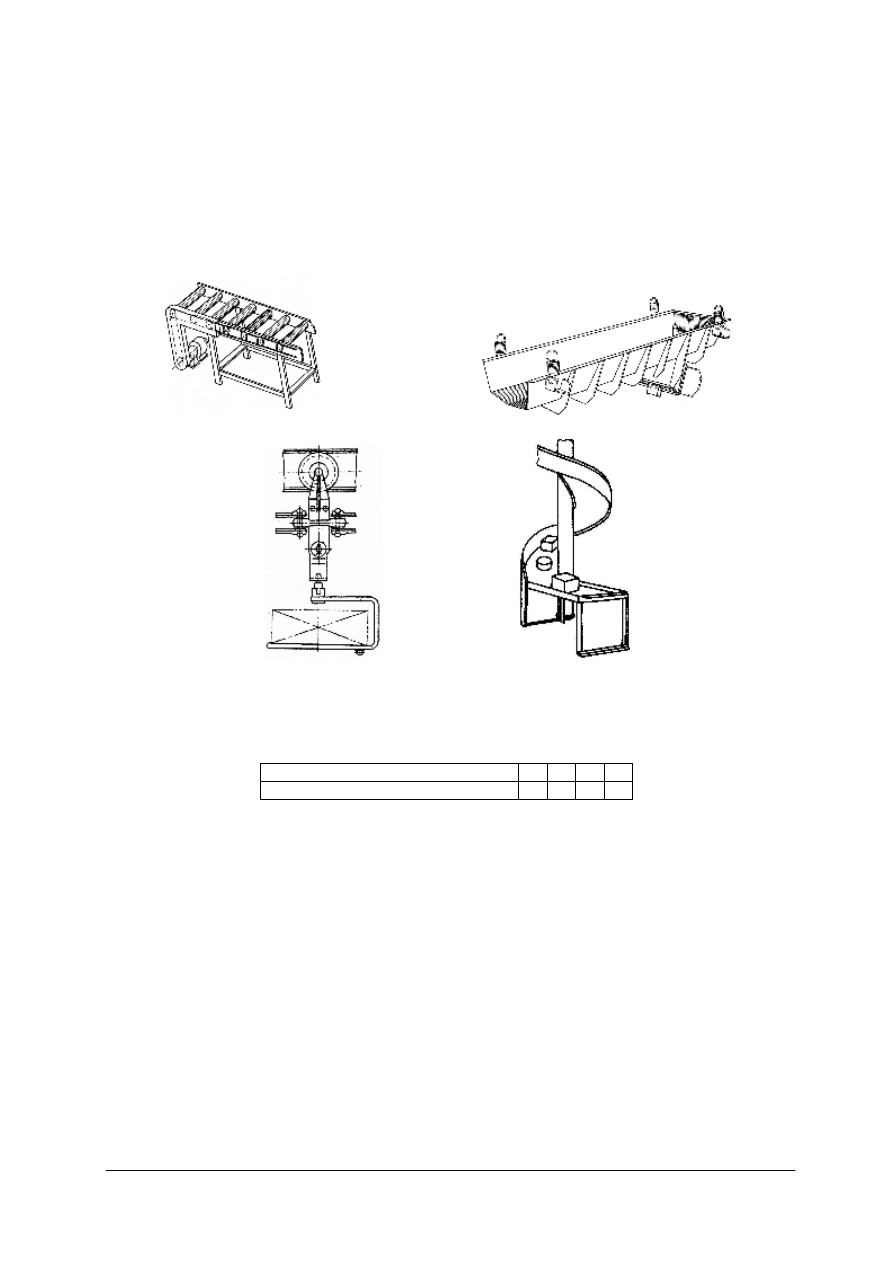
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
−
katalogi ofertowe wózków transportowych,
−
poradnik mechanika,
−
literatura z rozdziału 6.
Ćwiczenie 4
Przyporządkuj właściwą nazwę przenośnikom przedstawionym na rysunkach. Dokonaj
klasyfikacji ze względu na cechy konstrukcyjne.
1
2
3
4
a) grawitacyjny
b) podwieszany jednotorowy
c) ślimakowy
d) wałkowy napędzany
e) wibracyjny korytowy
f) członowy
Rozwiązanie
Nr rysunku
Oznaczenie nazwy przenośnika
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z rodzajami przenośników transportowych,
2) określić kryteria klasyfikacji przenośników transportowych,
3) połączyć w pary rysunek i odpowiadającą mu nazwę,
4) wyniki zapisać w tabeli,
5) zaprezentować efekty swojej pracy,
6) dokonać oceny poprawności wykonania ćwiczenia.
Wyposażenie stanowiska pracy:
−
arkusz do ćwiczenia,
−
przybory do pisania,
−
katalogi ofertowe przenośników,
−
literatura z rozdziału 6.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) sklasyfikować urządzenia dźwigowo-transportowe?
o
o
2) sklasyfikować dźwignice?
o
o
3) wymienić podstawowe zespoły i elementy dźwignic?
o
o
4) wymienić rodzaje cięgników i wskazać ich zastosowanie?
o
o
5) wymienić rodzaje suwnic i ich zastosowanie?
o
o
6) wymienić rodzaje żurawi i określić ich przeznaczenie?
o
o
7) wymienić rodzaje dźwigników i wskazać ich zastosowanie?
o
o
8) rozróżnić mechanizmy stosowane w dźwignicach?
o
o
9) dobrać właściwą dźwignicę do wykonania planowanego zadania
w oparciu o informacje zawarte z DTR urządzenia?
o
o
10) określić uprawnienia zawodowe wymagane od obsługujących dźwignice? o
o
11) określić i sklasyfikować wózki transportowe?
o
o
12) dobrać właściwy wózek transportowy do wykonania planowanego zadania
w oparciu o informacje zawarte z DTR urządzenia?
o
o
13) opisać wymagania Urzędu Dozoru Technicznego w zakresie eksploatacji
wózków transportowych?
o
o
14) określić i sklasyfikować przenośniki?
o
o
15) sklasyfikować przenośniki cięgnowe, określić budowę i zastosowanie?
o
o
16) sklasyfikować przenośniki bezcięgnowe, określić budowę i zastosowanie? o
o
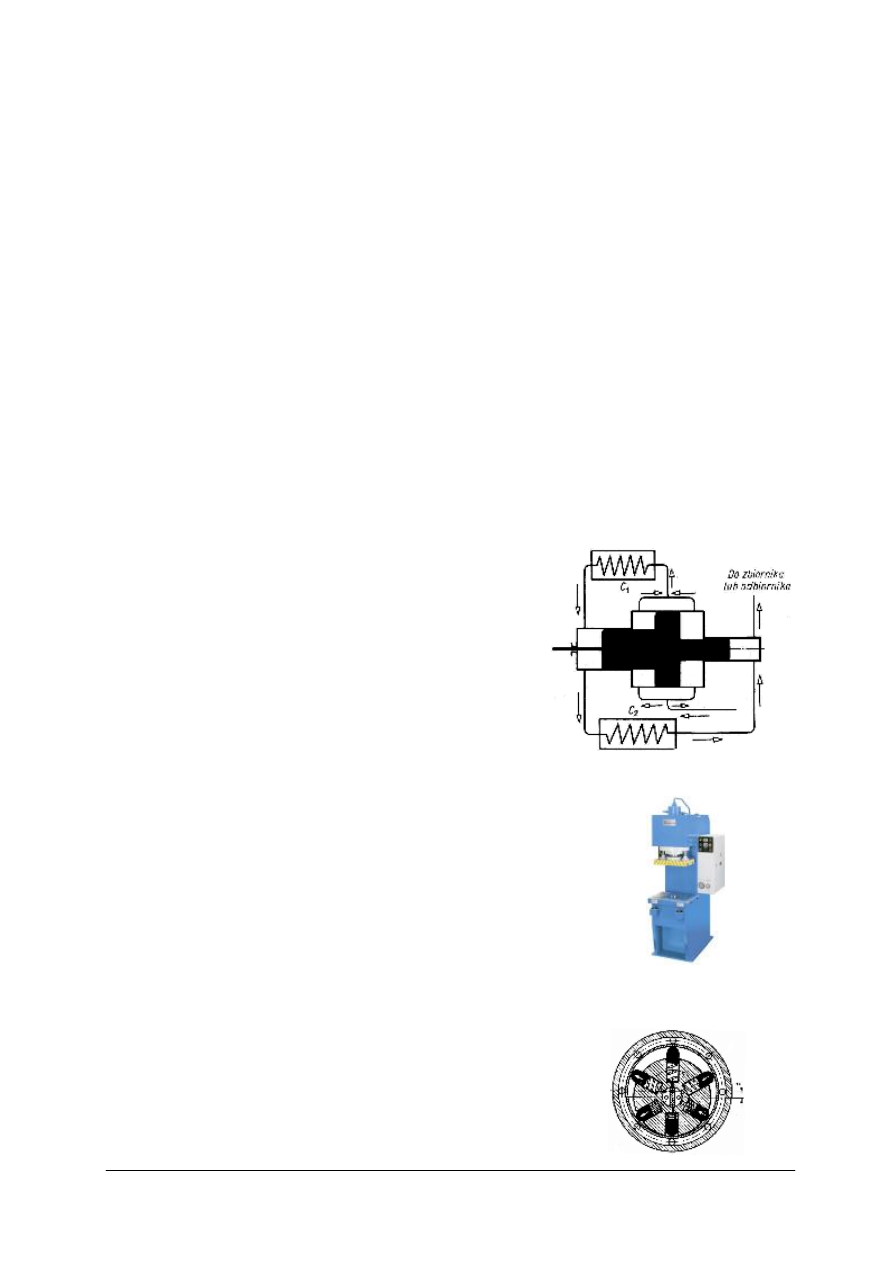
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawidłowa.
5. Udzielaj odpowiedzi na załączonej karcie odpowiedzi, stawiając w odpowiedniej rubryce
znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem, a następnie
ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Jeśli udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż rozwiązanie
zadania na później i wróć do niego, gdy zostanie Ci wolny czas.
8. Na rozwiązanie testu masz 50 min.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1. Schemat przedstawia zasadę działania sprężarki
a) tłokowej trzystopniowej.
b) tłokowej dwustopniowej.
c) tłokowej jednostopniowej.
d) nurnikowej dwustopniowej.
2. Maszyna przedstawiona na rysunku to
a) prasa hydrauliczna.
b) strugarka pionowa.
c) ciągarka pionowa.
d) dźwignik hydrauliczny.
3. Pompa przestawiona na rysunku często stosowana w napędach hydraulicznych to pompa
a) tłokowa promieniowa.
b) wyporowa łopatkowa.
c) rotacyjna zębata.
d) wirowa osiowa.
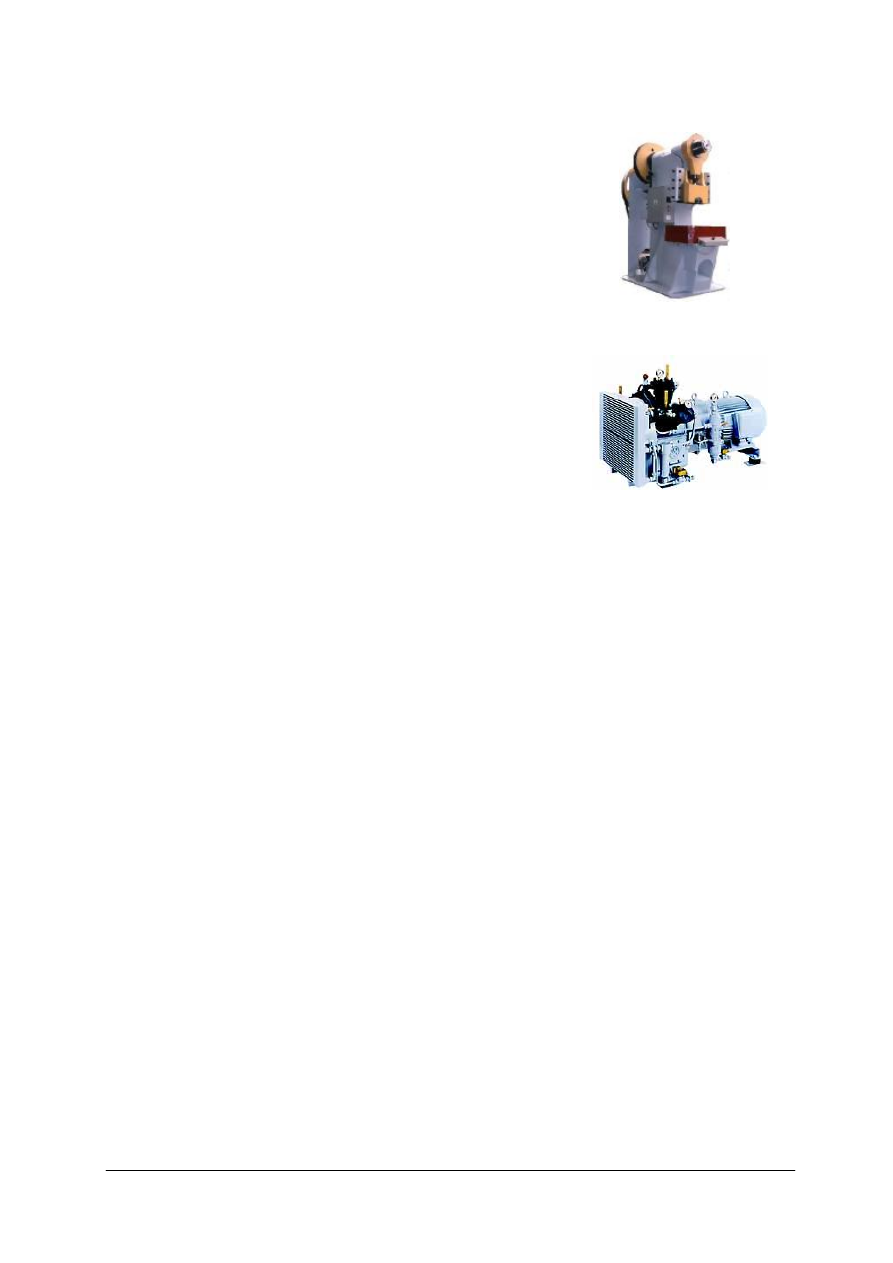
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
4. Ruch suwaka w prasie przedstawionej na rysunku realizowany jest poprzez mechanizm
a) jarzmowy.
b) śrubowy.
c) dźwigniowy.
d) mimośrodowy.
5. Dane techniczne takie jak: ciśnienie użytkowe, wydajność, moc silnika napędowego
dotyczą urządzenia przedstawionego na rysunku. Urządzeniem tym jest
a) pompa rotacyjna.
b) sprężarka wirnikowa.
c) sprężarka tłokowa.
d) pompa dyfuzyjna.
6. Suwnica, której konstrukcja nośna wyposażona jest w dwie wysokie podpory poruszające
się po torach ułożonych na poziomie składowania ładunków to suwnica
a) pomostowa podwieszana.
b) pomostowa natorowa.
c) bramowa.
d) półbramowa.
7. Podstawowym parametrem technicznym wózka naładownego jest
a) prędkość jazdy.
b) zewnętrzny promień zawracania.
c) dopuszczalna ładowność.
d) zdolność pokonywania wzniesień.
8. Badaniom ograniczonym przez Urząd Dozoru Technicznego podlegają
a) podnośniki prowadzone i zdalnie sterowane.
b) suwnice pomostowe natorowe.
c) wózki jezdniowe podnośnikowe.
d) wózki jezdniowe z wysięgnikiem.
9. Podstawowe mechanizmy każdej suwnicy to
a) mechanizm hamulcowy, mechanizm zapadkowy, mechanizm podnoszenia.
b) mechanizm jazdy suwnicy, mechanizm jazdy wózka, mechanizm podnoszenia.
c) mechanizm jazdy wózka, mechanizm zapadkowy, mechanizm hamulcowy.
d) mechanizm podnoszenia, mechanizm jazdy wózka, mechanizm zapadkowy.
10. Sprężarki wywołują przyrost ciśnienia
a) poniżej 0,2 MPa.
b) do 0,015 MPa.
c) powyżej 0,2 MPa.
d) 0,001÷0,003 MPa.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
11. Pompy tłokowe zaliczamy do pomp wyporowych o
a) postępowo-zwrotnym ruchu elementu roboczego.
b) obrotowo-zwrotnym ruchu elementu roboczego.
c) obrotowym ruchu elementu roboczego.
d) obiegowym ruchu elementu roboczego.
12. Maszyna przemysłowa to
a) przedmiot umożliwiający wykonanie określonego procesu.
b) zespół mechanizmów zdolnych do wykonywania pracy użytecznej.
c) zespół połączonych ze sobą części stanowiących funkcjonalną całość.
d) część maszyny zdolna do przekazywania ruchu.
13. Układ zaworów przedstawiony na rysunku wskazuje, że sprężarka jest w fazie
a) tłoczenia.
b) sprężania.
c) rozprężania.
d) ssania.
14. Napęd hydrauliczny jest to napęd
a) wywołany ruchem cieczy pod ciśnieniem, oparty na prawie Pascala.
b) mechanizmów maszyn przy wykorzystaniu energii sprężonego gazu.
c) wywołany ruchem cieczy pod niedużym ciśnieniem, oparty na prawie Ohma.
d) oparty na przyroście ciśnienia statycznego gazu w wentylatorach.
15. Rysunek przedstawia zestaw przygotowania sprężonego powietrza. Cyframi oznaczono
a) 1 – reduktor, 2 – smarownica, 3 – filtr.
b) 1 – smarownica, 2 – reduktor, 3 – filtr.
c) 1 – filtr, 2 – smarownica, 3 – reduktor.
d) 1 – filtr, 2 – reduktor, 3 – smarownica.
16. Rysunek przedstawia suwnicę
a) pomostową dwudźwigarową.
b) podwieszaną dwubelkową.
c) bramową dwudźwigarową.
d) półbramową dwudźwigarową.
17. Dźwignica, w której ładunek jest przemieszczany za pośrednictwem układu dźwigni
napędzanych za pomocą śruby to
a) wciągnik linowy.
b) dźwignik dźwigniowy.
c) żuraw przyścienny.
d) wciągarka stojakowa.
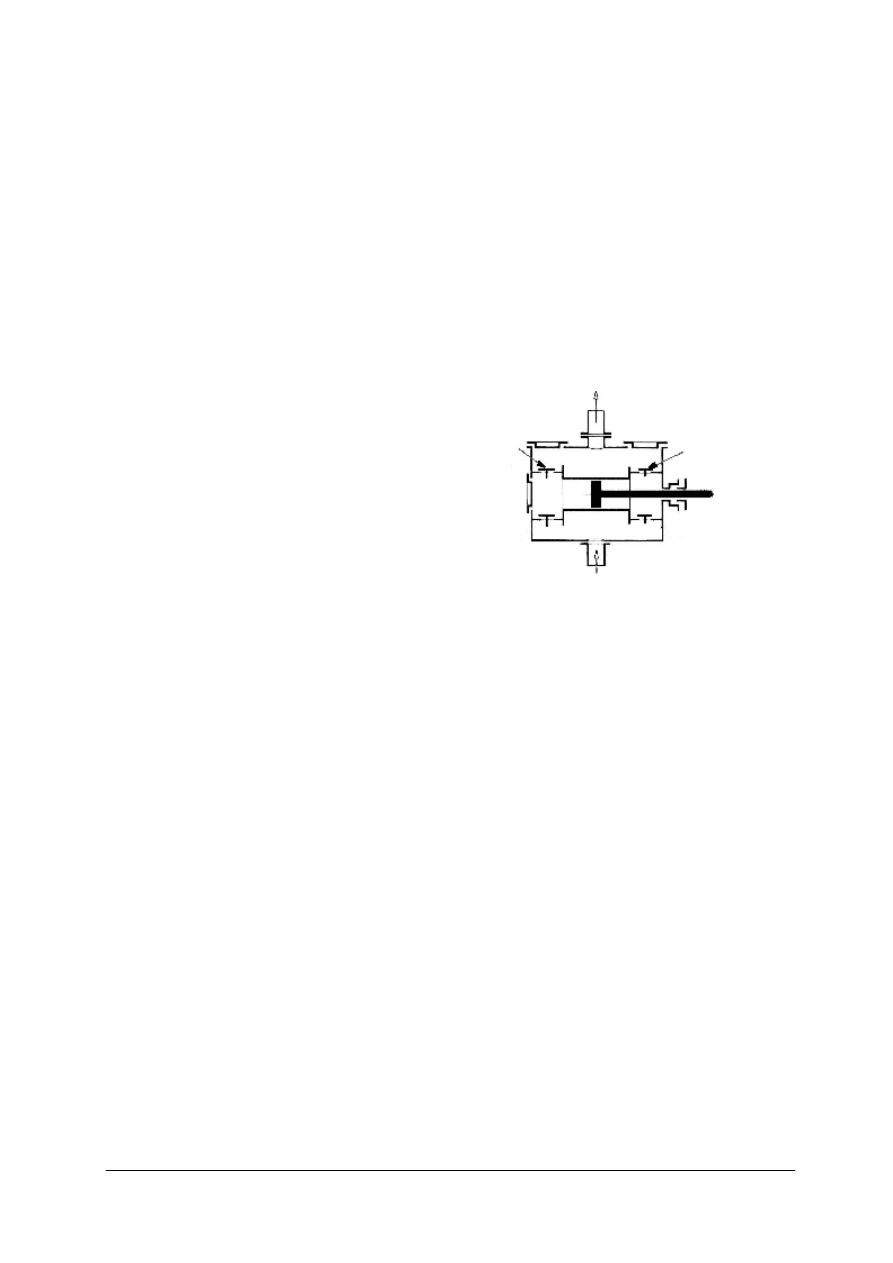
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
18. Przy doborze wentylatora należy brać pod uwagę jego sprawność, tzn. stosunek
a) ciśnienia na wlocie do ciśnienia na wylocie wentylatora.
b) mocy użytecznej do mocy silnika napędzającego.
c) objętości gazu zassanego do objętości gazu wylotowego.
d) średnicy króćca ssawnego do średnicy króćca wylotowego.
19. Podstawowe parametry żurawia słupowego to
a) prędkość podnoszenia i opuszczania ładunku.
b) masa własna i rodzaj zblocza.
c) udźwig i kąt obrotu wysięgnika.
d) rodzaj użytego napędu i rodzaj zastosowanej liny.
20. Elementy urządzenia oznaczone strzałką na rysunku obok to
a) zawory tłoczne.
b) zawory ssawne.
c) dławica odcinająca.
d) tłok górny.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
KARTA ODPOWIEDZI
Imię i nazwisko ............................................................................................................................
Dobieranie maszyn i urządzeń przemysłowych i transportowych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
6. LITERATURA
1. Bożenko L.: Maszynoznawstwo. WSiP, Warszawa 1994
2. Buczek K.: Kierowca-operator wózków jezdniowych napędzanych. KaBe, Krosno 1997
3. Data L.: Technologia odlewnictwa. WSiP, Warszawa 1975
4. Dretkiewicz-Więch J.: Technologia mechaniczna. Techniki wytwarzania. WSiP,
Warszawa 2000
5. Goździecki M., Świątkiewicz H.: Przenośniki. WNT, Warszawa 1979
6. Górecki A.: Technologia ogólna. WSiP, Warszawa 1998
7. Pawlicki K.: Transport w przedsiębiorstwie. WSiP, Warszawa 1996
8. Praca zbiorowa: Mały poradnik mechanika. Tom I i II. WNT, Warszawa 1999
9. Praca zbiorowa: Poradnik inżyniera. Odlewnictwo Tom I i II. WNT, Warszawa 1986
10. Romaniuk St.: Transport wewnętrzny w hutach. WSiP, Warszawa 1972
11. Świątkiewicz H.: Poradnik dźwignicowego. WNT, Warszawa 1987
12. Zawora J.: Podstawy technologii maszyn. WSiP, Warszawa 2001
13. Zieliński Z.: Dźwignice i urządzenia transportowe. WSiP, Warszawa 1986
Czasopisma:
–
Przegląd Odlewnictwa
–
Odlewnictwo - nauka i praktyka
–
Mechanik
–
Przegląd Mechaniczny
Wyszukiwarka
Podobne podstrony:
operator maszyn i urzadzen odlewniczych 812[03] z1 01 n
operator maszyn i urzadzen odlewniczych 812[03] z1 01 n
operator maszyn i urzadzen odlewniczych 812[03] z1 01 n
operator maszyn i urzadzen odlewniczych 812[03] z1 02 u
operator maszyn i urzadzen odlewniczych 812[03] o1 01 u
operator maszyn i urzadzen odlewniczych 812[03] z2 01 u
operator maszyn i urzadzen odlewniczych 812[03] z2 01 n
operator maszyn i urzadzen odlewniczych 812[03] o1 01 n
operator maszyn i urzadzen odlewniczych 812[03] z1 02 u
operator maszyn i urzadzen odlewniczych 812[03] z1 02 u
operator maszyn i urzadzen odlewniczych 812[03] z2 01 n
operator maszyn i urzadzen odlewniczych 812[03] o1 01 n
operator maszyn i urzadzen odlewniczych 812[03] z1 02 n
operator maszyn i urzadzen odlewniczych 812[03] z1 02 n
operator maszyn i urzadzen odlewniczych 812[03] z2 05 n
operator maszyn i urzadzen odlewniczych 812[03] z2 02 u
więcej podobnych podstron