Janusz Kacerka
Dyskretne Układy
Regulacji
————————————————————————————————————————
Semestr 5 Elektrotechnika
Rozdział 1 - 2
Spis treści
RZYCZYNY ZASTOSOWANIA URZĄDZEŃ DYSKRETNYCH W UKŁADACH AUTOMATYKI
ADANIA REALIZOWANE PRZEZ URZĄDZENIA CYFROWE W AUTOMATYCE
RZETWARZANIE SYGNAŁÓW W UKŁADACH DYSKRETNYCH
2
Dyskretne Układy Regulacji
Rozdział 1
1. Wstęp
Tematem opracowania są dyskretne układy regulacji. Omówiono najważniejsze
zagadnienia związane z modelowaniem, analizą i syntezą dyskretnych układów regulacji.
Wykład obejmuje głównie problemy dyskretnych układów liniowych stacjonarnych.
Zagadnienie nieliniowości jest związane z realizacją specjalnych algorytmów sterowania
dyskretnego względnie z nieliniowością sterowanego obiektu. W programie przewidziano
zapoznanie się z wybranym układem nieliniowym – układem regulacji dwupołożeniowej.
3
Dyskretne Układy Regulacji
We wstępie przedstawiono krótko przyczyny zastosowania układów dyskretnych w
automatyce i zadania realizowane przez te układy. Układy dyskretne realizowane są przy
pomocy urządzeń cyfrowych: komputerów, sterowników PLC, regulatorów cyfrowych.
Rozwój techniki zadecydował o powszechności zastosowań urządzeń o działaniu
dyskretnym (cyfrowym) w przemyśle, urządzeniach domowych powszechnego użytku i
Rozdział 1
innych.
1.1 Przyczyny zastosowania urządzeń dyskretnych w układach automatyki
- Rozwój techniki cyfrowej,
- Obniżka kosztów urządzeń,
- Możliwość kontroli wielu parametrów,
- Wykrywanie stanów awaryjnych,
- Rejestracja przebiegów regulacji,
- Możliwość realizacji złożonych reguł sterowania,
- Przyspieszenie przebiegu procesów realizowanych etapami,
- Dokładność sterowania,
4
Dyskretne Układy Regulacji
- Automatyzacja procesów produkcyjnych.
Rozdział 1
1.2 Zadania realizowane przez urządzenia cyfrowe w automatyce
a) Nadzorowanie przebiegu procesu produkcyjnego lub technologicznego - SCADA
(Supervisory Control And Data Acquisition)
- System komputerowy pełniący nadrzędną rolę w stosunku do regulatorów cyfrowych
(także analogowych), sterowników PLC i innych urządzeń wchodzących w skład
rozbudowanego systemu produkcji.
- Głównym zadaniem SCADA jest:
- Zbieranie i rejestracja (archiwizacja) danych;
- Wizualizacja przebiegów, wskazywanie trendów zmian, wyznaczanie syntetycznych
wskaźników sterowania;
- Przewidywanie i sygnalizacja stanów alarmowych;
5
Dyskretne Układy Regulacji
- Zadawanie parametrów procesu.
Rozdział 1
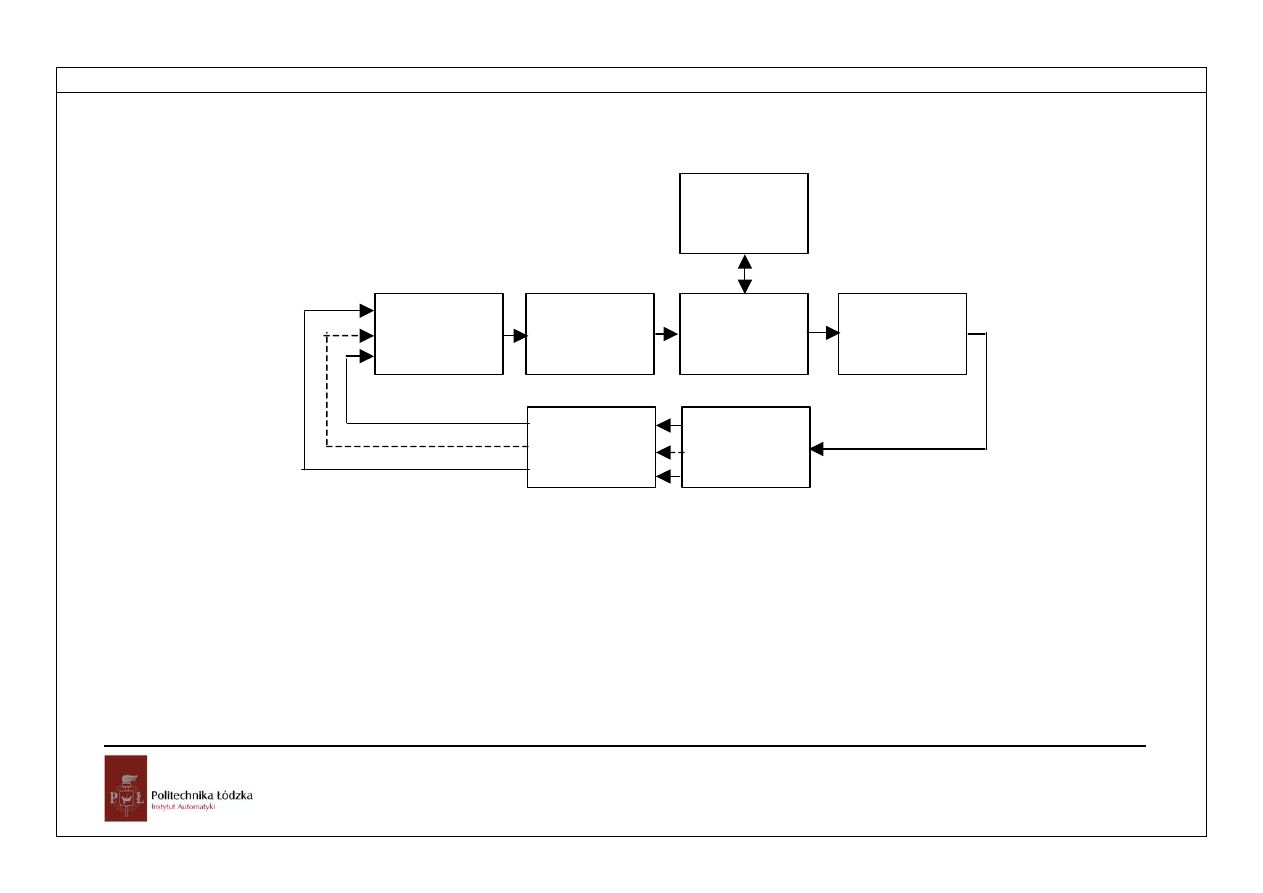
b) Bezpośrednie sterowanie cyfrowe (DDC - Direct Digital Control)
Urządzenia
pomiarowe
Przetworniki
sygnałów
Komputer
Urządzenia
zewnętrzne
Przetworniki
sygnałów
Urządzenia
wykonawcze
Obiekt
Rys.1.1. Schemat układu DDC
6
Dyskretne Układy Regulacji
c) Pośrednie sterowanie cyfrowe (sterowanie nadrzędne)
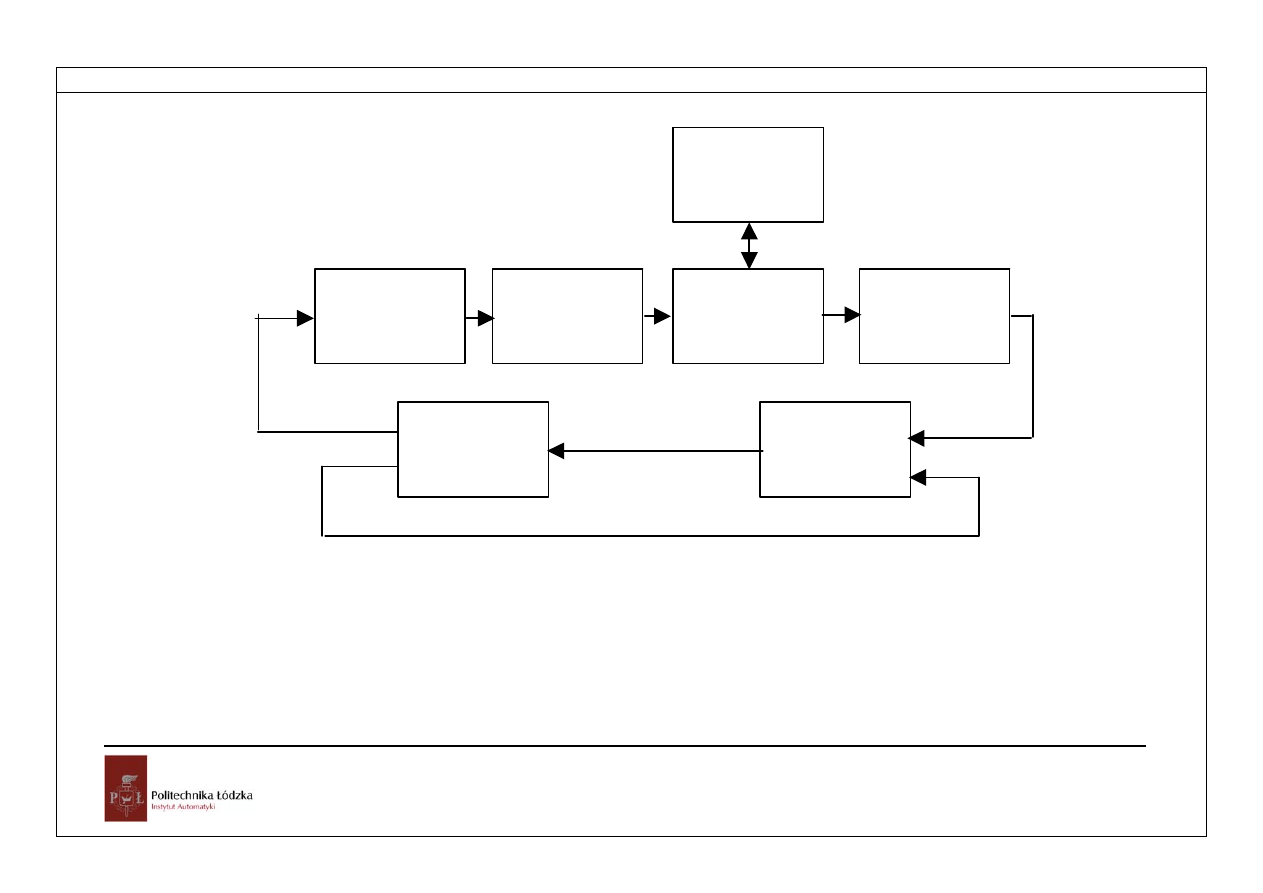
Rozdział 1
Urządzenia
pomiarowe
Przetworniki
sygnałów
Komputer
Urządzenia
zewnętrzne
Przetworniki
sygnałów
Regulator
Obiekt
Rys.1.2. Sterowanie nadrzędne (sterowanie pośrednie)
d) Sterowanie sekwencyjne,
7
Dyskretne Układy Regulacji
e) Sterowanie programowe przesunięć (kątowych, liniowych).
Rozdział 1
1.3 Układy czasu rzeczywistego
Czas jest bardzo ważnym czynnikiem we wszelkich przemysłowych zastosowaniach
komputerów. Komputer musi często reagować na zewnętrzne zdarzenia w ściśle
określonym czasie. Po pobraniu danych z układu pomiarowego komputer musi
przyporządkować próbkę chwili, w której została pobrana. Takie wymagania spełniane są
przez układy czasu rzeczywistego (real-time systems). Układ czasu rzeczywistego może
być zdefiniowany jako taki, w którym:
-
przebieg programu zależy od zdarzeń zewnętrznych w stosunku do komputera lub
od upływu czasu,
8
Dyskretne Układy Regulacji
-
dane przetwarzane przez komputer zawierają czas lub przedział czasu.
System czasu rzeczywistego pracuje pod kontrolą systemu operacyjnego czasu
Rozdział 1
rzeczywistego. Oprócz komputera do systemów czasu rzeczywistego włącza się sieci
komputerowe, urządzenia wejść i wyjść oraz urządzenia sterowane przez komputer np.
roboty.
Wszystkie definicje systemów czasu rzeczywistego podkreślają związek przebiegu
zmian w środowisku zewnętrznym i obliczeń przeprowadzanych w systemie
komputerowym. Synchronizacja obliczeń, przekroczenia wymaganego czasu reakcji
systemów oraz przeznaczenie systemów czasu rzeczywistego są kryteriami podziału
systemów [23]. Wymienia się następujące systemy:
•
systemy o ostrych ograniczeniach czasowych (hard real-time), w których przekroczenie
terminu wykonania zadań powoduje zagrożenie dla otoczenia (zdrowie i życie ludzi,
zniszczenie urządzeń)
9
Dyskretne Układy Regulacji
•
systemy o mocnych ograniczeniach czasowych (firm real-time), w których przekroczenie
Rozdział 1
terminu jest przyczyną nieprzydatności wypracowanego przez system wyniku, bez
zagrożenia dla ludzi lub sprzętu; pojęcie to stosowane jest głównie w opisie baz danych
czasu rzeczywistego,
10
Dyskretne Układy Regulacji
•
systemy o łagodnych ograniczeniach czasowych (soft real-time), w których przekroczenie
określonego czasu wiąże się z negatywnymi skutkami w tym większym zakresie im dłużej
trwało przekroczenie terminu.
Rozdział 2
11
Dyskretne Układy Regulacji
2. Dyskretny układ regulacji
Polska norma podaje następujące definicje.
a) Układ sterowania o działaniu dyskretnym – układ, w którym wielkość wyjściowa, co
najmniej jednego z istotnych elementów układu sterującego, może przyjmować tylko
skończoną liczbę stanów wyjść.
b) Układ sterowania impulsowy – układ, w którym co najmniej jeden z istotnych
elementów układu sterującego może przetwarzać wielkości wejściowe tylko w
określonych chwilach, przy czym wielkości wyjściowe tych elementów są sygnałami
impulsowymi.
c) Układ dyskretny – układ złożony z elementów dyskretnych, który pod wpływem
działania nań zewnętrznych wielkości fizycznych generuje na swoim wyjściu sygnał
dyskretny
Rozdział 2
12
Dyskretne Układy Regulacji
d) Sygnał cyfrowy – sygnał skwantowany, przedstawiony w postaci odwzorowującej liczbę
[14].
Wykład dotyczy układów regulacji, to znaczy układów działających w systemie
zamkniętym (Rys.2.1). Do elementów wchodzących w skład dyskretnych układów
regulacji odnoszą się przytoczone definicje, przy czym znaczenie tych definicji
odpowiada szerszej klasie układów np. układów pracujących w systemie otwartym,
układów przekaźnikowych, sekwencyjnych.
Rozdział 2
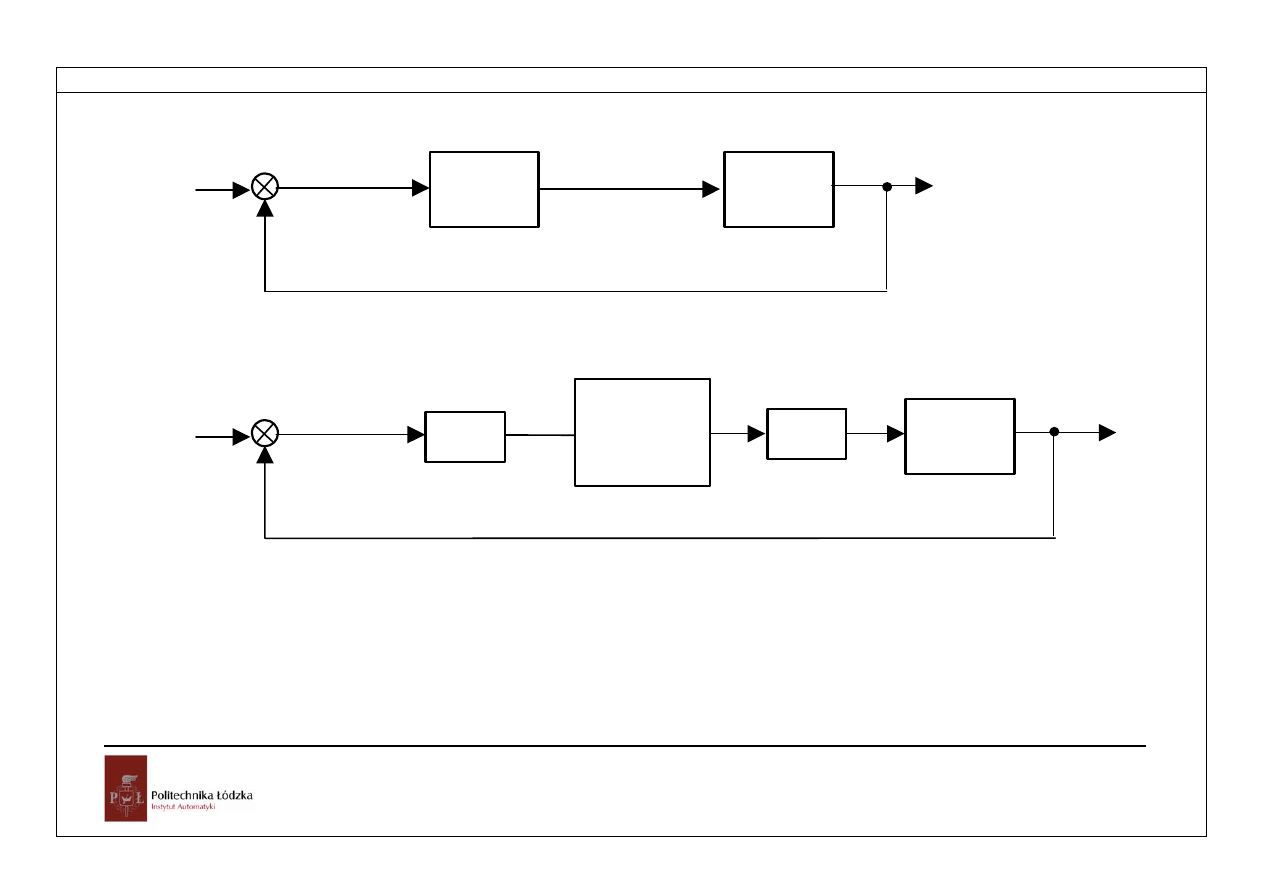
2.1 Przetwarzanie sygnałów w układach dyskretnych
Na rys.2.1 przedstawiono ogólną postać układu regulacji (a) oraz postać typową dla
układu regulacji dyskretnej (b). Realizacja techniczna regulatora może być różna, może to
być:
- Regulator cyfrowy (uniwersalny lub specjalizowany);
- Regulator realizowany przez PLC;
13
Dyskretne Układy Regulacji
- Komputer z kartą pomiarową z wejściami i wyjściami analogowymi.
Rozdział 2
A/D
Cyfrowy
algorytm
regulacji
Obiekt
regulacji
D/A
y
0
ε
ε
d
u
d
u
a
y
_
Obiekt
regulacji
ε
u
y
_
Regulator
a)
y
0
b)
Rys.2.1. Schemat układu regulacji: a) postać ogólna, b) układ dyskretny
14
Dyskretne Układy Regulacji
Oznaczenia:
Rozdział 2
y
0
– wartość zadana wielkości regulowanej;
ε - uchyb regulacji;
u – sygnał sterujący obiektu regulacji;
y – wielkość regulowana;
ε
d
– sygnał dyskretny uchybu regulacji;
u
d
–dyskretny sygnał sterujący obiektu regulacji.
W przetworniku A/D (A/C – analogowo - cyfrowy) dokonywana jest zamiana sygnału
ciągłego, w tym przypadku sygnału uchybu ε(t) na sygnał cyfrowy ε
d
(k), gdzie k= 0,1,2,3...
Do sterowania obiektu potrzeba zazwyczaj sygnału analogowego. Jest to sygnał ciągły
przedziałami. Sygnały są ciągłe w tym przypadku w przedziałach czasu
15
Dyskretne Układy Regulacji
T
i
k
≤t< T
i
(k+1) k=0,1,2,3...
(2.1)
Rozdział 2
Sygnał dyskretny zostaje zamieniony na analogowy w przetworniku D/A (C/A - cyfrowo –
analogowy). W tym przypadku wartość sygnału jest stała w podanych przedziałach.
Natomiast sygnał cyfrowy u
d
zostaje z kolei przetworzony na sygnał analogowy u(t)
sterujący obiektem.
W procesach przemysłowych szereg sygnałów ma charakter ciągły, np. temperatura,
przepływ, ciśnienie, stężenie substancji, napięcie, prąd. Sygnały takie są przetwarzane na
sygnały cyfrowe. Sygnały zbierane w układzie regulacji mogą być przesyłane przez
elementy pomiarowe także w postaci cyfrowej. Z zasady pomiar i odczyt danych związany z
przetwarzaniem na sygnał dyskretny odbywa się w określonych (dyskretnych) chwilach
czasu.
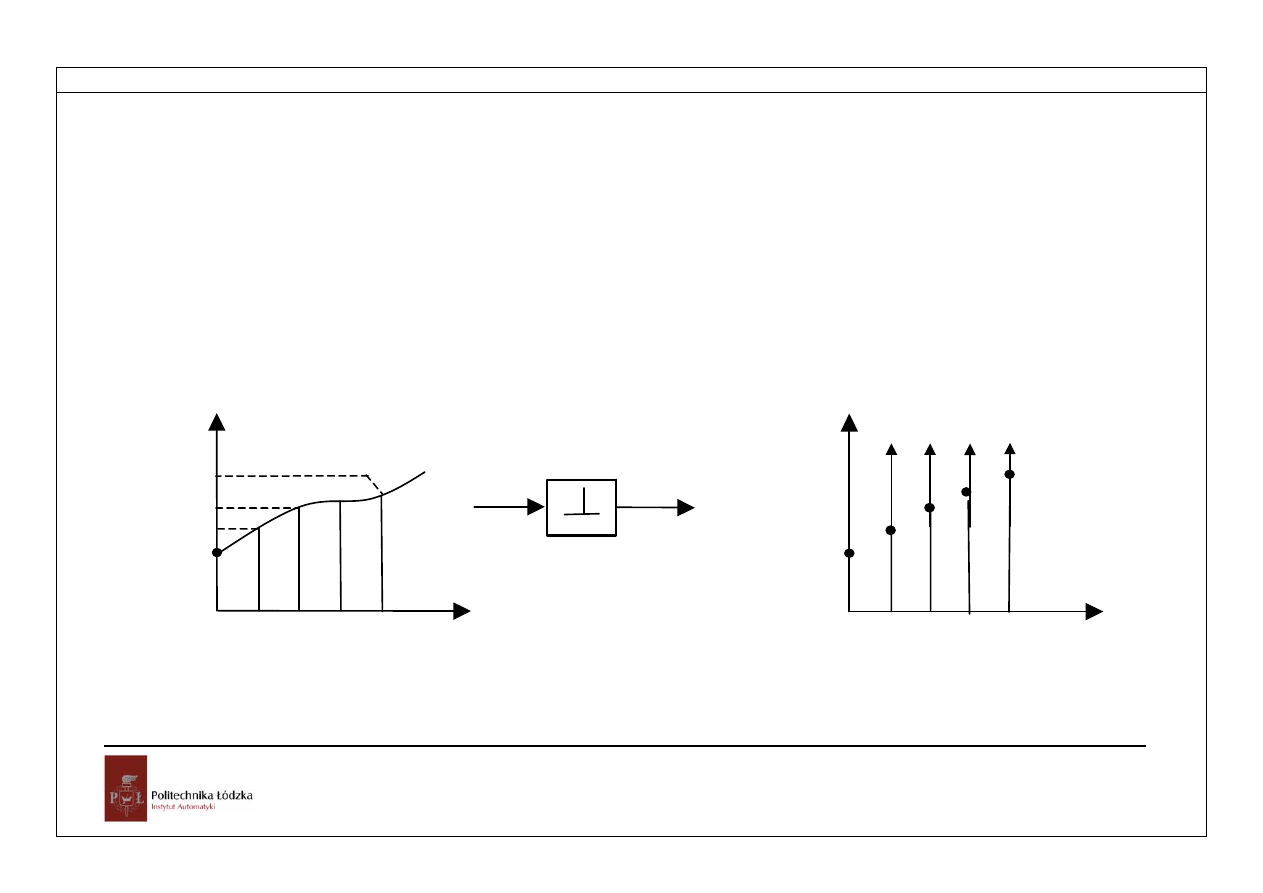
16
Dyskretne Układy Regulacji
Rozdział 2
ε(t)
ε
i
(k)
T
s
kT
s
t
ε
d
(k
)
T
s
T
s
kT
s
a)
b)
c)
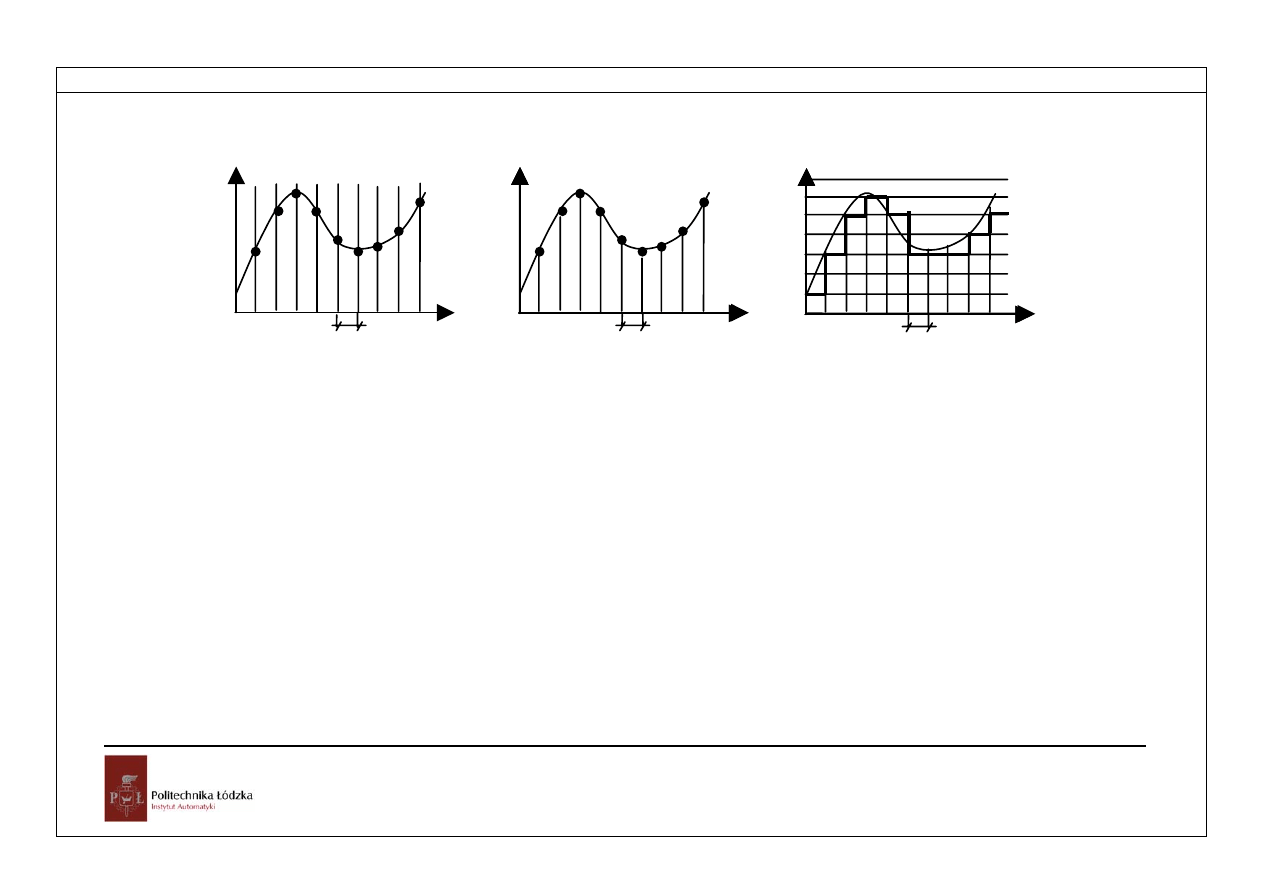
Rys.2.2. Zamiana sygnału ciągłego a) na impulsowy b) i dyskretny w poziomie c)
17
Dyskretne Układy Regulacji
Na rys.2.2 pokazano etapy przetwarzania sygnału analogowego. Sygnał jest
próbkowany w czasie (następuje jego dyskretyzacja w czasie, kwantowanie w czasie) a
następnie kwantowany w poziomie. Próbkowanie w czasie odbywa się zazwyczaj w
ustalonych chwilach czasu, którym można przypisać kolejne liczby naturalne k. Czas od
pobrania jednej próbki sygnału do pobrania następnej nazywa się okresem kwantowania
Rozdział 2
18
Dyskretne Układy Regulacji
(okresem próbkowania, okresem impulsowania). Sygnał po próbkowaniu w czasie ma
wartość sygnału analogowego w kolejnych chwilach czasu i nazywany jest sygnałem
impulsowym. Informacja o wartości sygnału np. wartości regulowanej dotyczy tylko
wybranych chwil czasu. Sygnał impulsowy, np.
ε
i
na rys.2.1, może przyjmować ogólnie
dowolne wartości rzeczywiste. W układzie z urządzeniami cyfrowymi sygnał taki może
przyjmować jednak tylko wybrane wartości z przedziału narzuconego przez zastosowane
urządzenie. Sygnał zostaje poddany kwantowaniu w poziomie, np. sygnał
ε
d
na rys.2.1.
Kolejne poziomy są oddalone od siebie o ustaloną, stałą wartość. Skwantowane w
czasie i poziomie sygnały są kodowane i w postaci sygnałów cyfrowych przetwarzane
przez komputer według określonego algorytmu. Kodowanie następuje w przetworniku
analogowo – cyfrowym i daje ciąg liczb w kodzie binarnym np. prostym lub kodzie BCD
(kod 8421, kod dwójkowo – dziesiętny).
Rozdział 2
Przetwornik wprowadza do układu regulacji błędy analogowe (dokładność względna i
bezwzględna) oraz błąd kwantyzacji. Przetwornik charakteryzuje się liczbą dyskretnych
wartości, które może wytworzyć. Liczbę tę określa się w bitach. Na przykład dla
przetwornika N=12 bitowego sygnał cyfrowy może przyjąć 2
12
=4096 wartości. Wynika
stąd rozdzielczość przetwornika podawana w zwykle w procentach
Rozdzielczość
%
024
,
0
%
2
100
%
2
100
12
12
=
=
=
−
N
N
(2.2)
19
Dyskretne Układy Regulacji
Przetwarzanie sygnałów – próbkowanie i kwantowanie – powoduje określone
problemy w realizacji sterowania, różniące układy dyskretne od układów ciągłych.
Analiza i projektowanie układów dyskretnych wymaga innego aparatu matematycznego
niż stosowany w układach ciągłych. W szczególności w układach dyskretnych nie są
Rozdział 2
określone pochodne funkcji i nie można posługiwać się zwykłymi równaniami
różniczkowymi. Charakterystyczne dla układów dyskretnych jest:
- stosowanie równań różnicowych zamiast równań różniczkowych;
- wykorzystanie przekształcenia dyskretnego Z zamiast przekształcenia Laplace’a.
Na ogół w analizie i projektowaniu układów dyskretnych zaniedbuje się nieliniowości
wynikające z kwantowania sygnałów w poziomie m.in. ze względu na dużą rozdzielczość
przetwornika A/D. Do rozważań bierze się sygnały impulsowe. Wówczas dla liniowego
obiektu ciągłego można znaleźć dyskretny model liniowy. W większości przypadków
sterowania takie podejście jest wystarczające.
Przykład.2.1
Wyznaczanie całki y(k) sygnału dyskretnego x(k) (całkowanie dyskretne). Przedstawiony
przykład dotyczy całkowania metodą prostokątów (Euler Forward Method)
20
Dyskretne Układy Regulacji
Algorytm przedstawiono w postaci pseudokodu.
Rozdział 2
Start
1. Zapamiętaj wartość początkową całki - y(0)=0
2. Odczytaj próbkę z przetwornika A/D i zapamiętaj - A/D ->x
3. Oblicz bieżącą wartość - y=y+T
s
*x
4. Wyślij wartość y do przetwornika D/A
5. Czekaj do końca okresu impulsowania (opóźnienie kolejnej operacji o okres T
s
)
6. Przejdź do punktu 2
W układzie dyskretnym z pominięciem kwantowania w poziomie w punkcie 2 przykładu
odczytuje się a następnie zapamiętuje do obliczeń próbkę sygnału ciągłego.
21
Dyskretne Układy Regulacji
Rozdział 2
2.2 Modele układów dyskretnych
W układach dyskretnych w ustalonych chwilach czasu jest odczytywana wartość
sygnału ciągłego i po przewidzianych algorytmem sterowania obliczeniach sygnał
sterujący jest przekazywany na wejście obiektu regulacji. Sygnał dyskretny, który można
uważać za rezultat działania idealnego klucza, ma postać:
( )
( )
⎩
⎨
⎧
≠
=
=
s
s
d
kT
t
kT
t
dla
t
u
t
u
0
(2.3)
u(t)
T
s
u(kT
s
)
Rys.2.3. Klucz idealny
22
Dyskretne Układy Regulacji
Sygnał taki nie niesie ze sobą żadnej energii (całka Riemanna w otoczeniu chwil
impulsowania jest równa 0) i jako taki nie może wysterować obiektu ciągłego. Z tego
Rozdział 2
powodu stosuje się model przetwarzania sygnału ciągłego na dyskretny z
wykorzystaniem ciągu impulsów Diraca
(
)
( )
1
...
2
,
1
,
0
0
=
δ
=
⎩
⎨
⎧
≠
=
∞
=
−
δ
∫
∞
=
∞
−
dt
t
k
kT
t
kT
t
dla
kT
t
s
s
s
(2.4)
Impuls Diraca nie jest funkcją, lecz dystrybucją. Ma właściwości filtrujące, tzn. spełniona
jest zależność
( ) (
)
( )
s
s
kT
f
dt
kT
t
t
f
=
−
δ
∫
+∞
∞
−
(2.5)
23
Dyskretne Układy Regulacji
W teorii układów liniowych ciągłych znane jest pojęcie odpowiedzi impulsowej. Jest to
odpowiedź układu na sygnał w postaci impulsu Diraca. Ponieważ transformata Laplace’a
impulsu Diraca jest
Rozdział 2
( )
[ ]
( )
1
0
=
δ
=
δ
−
∞
∫
dt
e
t
t
L
st
(2.6)
to odpowiedź impulsowa jest określona wzorem
( )
( ) ( )
[ ]
( )
( )
( )
[
]
s
G
L
t
g
s
G
t
L
s
G
s
g
1
−
=
=
δ
=
,
(2.7)
gdzie G(s) – transmitancja ciągła obiektu,
g(s) – transformata odpowiedzi impulsowej równa transmitancji obiektu,
g(t) – odpowiedź impulsowa w funkcji czasu.
Klucz idealny skojarzony z ciągiem impulsów Diraca nazywa się impulsatorem idealnym.
Symbol impulsatora idealnego przedstawiono na rysunku
24
Dyskretne Układy Regulacji
u(t)
u*(t)
T
s
Rozdział 2
Rys.2.4. Impulsator idealny
Sygnał wyjściowy impulsatora idealnego jest określony wzorem
( )
( ) (
)
( ) (
)
s
k
s
s
k
kT
t
kT
u
kT
t
t
u
t
u
−
δ
=
−
δ
=
∑
∑
∞
=
∞
=
0
0
*
(2.8)
Odpowiedź na sygnał u(t) układu ciągłego, poprzedzonego impulsatorem idealnym,
można rozpatrywać jako sumę odpowiedzi impulsowych wynikających z pojawiania się na
wejściu układu ciągłego kolejnych impulsów Diraca z wagami u(kT
s
), lub w uproszczonym
zapisie u(k).
y(t)
T
s
y(kT
s
)
G(s)
u(t) u
*
(t)
y(t)
25
Dyskretne Układy Regulacji
Rys.2.5. Obiekt ciągły z impulsatorem idealnym
Rozdział 2
Odpowiedź układu przedstawionego na rysunku w dyskretnych chwilach czasu ma
następującą postać
( )
( ) (
)
( ) (
)
k
n
g
k
u
kT
nT
g
kT
u
nT
y
n
k
k
s
s
n
k
k
s
s
−
=
−
=
∑
∑
=
=
=
=
0
0
(2.9)
Postać sygnału y(nT
s
) wynika z sumowania wartości odpowiedzi impulsowych g(t) w
kolejnych chwilach k. Sumowanie pokazano w tabeli (2.1)
u(2T
s
)
u(t)
u(4T
s
)
u(T
s
)
u(0)
0 T
s
2T
s
3T
s
4T
s
t
u(t)
u
*
(t)
u
*
(t) (impulsy Diraca)
0 T
s
2T
s
3T
s
4T
s
kT
s
u(0)
δ(t)
u(T
s
)δ
(t-T
s
)
u(2T
s
)δ
(t-2T
s
)
u(3T
s
)δ
(t-3T
s
)
u(
4T
s
)δ
(t-4
T
s
)
26
Dyskretne Układy Regulacji
Rys.2.6. Działanie impulsatora idealnego
Rozdział 2
27
Dyskretne Układy Regulacji
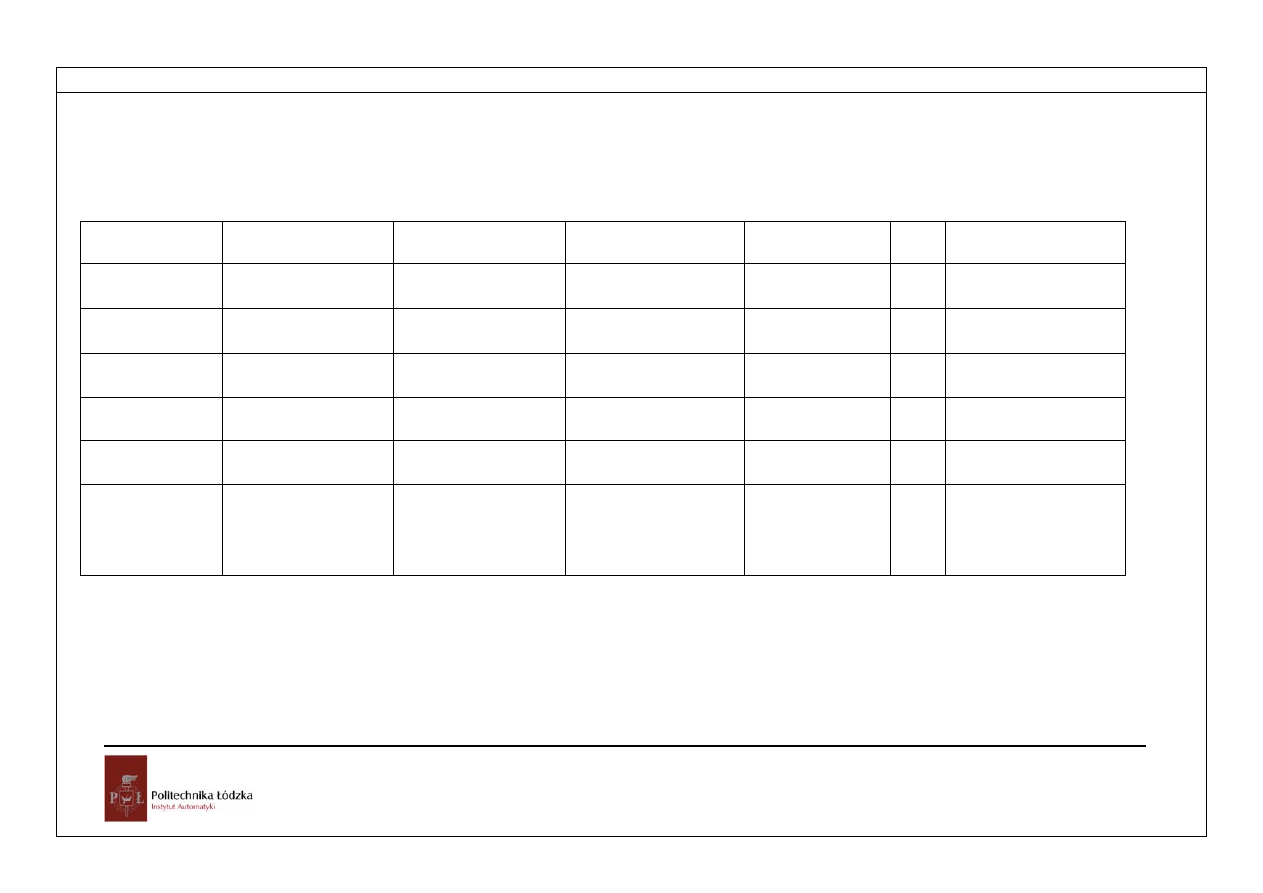
Rozdział 2
Tabela 2.1 Sumowanie wartości odpowiedzi impulsowych w dyskretnych chwilach
k 0 1
2
n
u(0)
δ(0)
u(0) g(0)
u(0) g(1)
u(0) g(2)
u(0) g(n)
u(1)
δ(n-1)
0
u(1) g(0)
u(1) g(1)
u(1) g(n-1)
u(2)
δ(n-2)
0
0
u(2) g(0)
u(2) g(n-2)
u(k)
δ(n-k)
0
0
0
u(k) g(0)
u(k) g(n-k)
y(n)
( ) (
)
k
g
k
u
k
k
−
∑
=
=
1
0
0
( ) (
)
k
g
k
u
k
k
−
∑
=
=
1
1
0
( ) (
)
k
g
k
u
k
k
−
∑
=
=
2
2
0
( ) (
)
k
n
g
k
u
n
k
k
−
∑
=
=0
28
Dyskretne Układy Regulacji
W przykładzie 2.1 próbki sygnału wejściowego są zapamiętywane na okres
impulsowania T
s
. Analogicznie wartość sygnału impulsowego jest zapamiętywana przy
Rozdział 2
dyskretyzacji sygnału ciągłego na rys.2.2. Model przetwarzania przedstawia się w postaci
połączenia szeregowego impulsatora idealnego i elementu formującego impuls Diraca z
wagą o wartości sygnału ciągłego w chwili próbkowania.
G(s)
Impulsator
idealny
ε(t)
ε
*
(t)
ε
d
(t)
Element
formujący
Rys.2.7. Schemat blokowy rzeczywistego impulsatora
Elementem formującym jest najczęściej układ o transmitancji:
29
Dyskretne Układy Regulacji
s
e
s
G
s
sT
−
−
=
1
)
(
(2.10)
Rozdział 2
Wiadomo, że na wejściu takiego obiektu występuje ciąg impulsów Diraca. Należy, zatem
wyznaczyć odpowiedź impulsową dla wybranej chwili kT
s
( )
( ) (
)
[
]
{
}
( )
( ) (
) ( )
(
)
(
)
s
s
s
s
skT
s
sT
s
s
d
T
k
t
kT
kT
t
kT
e
kT
s
e
L
kT
t
kT
L
s
G
L
t
s
s
1
1
1
1
)
(
1
1
+
−
ε
−
−
ε
=
=
⎭
⎬
⎫
⎩
⎨
⎧
ε
−
=
−
δ
ε
=
ε
−
−
−
−
(2.11)
30
Dyskretne Układy Regulacji
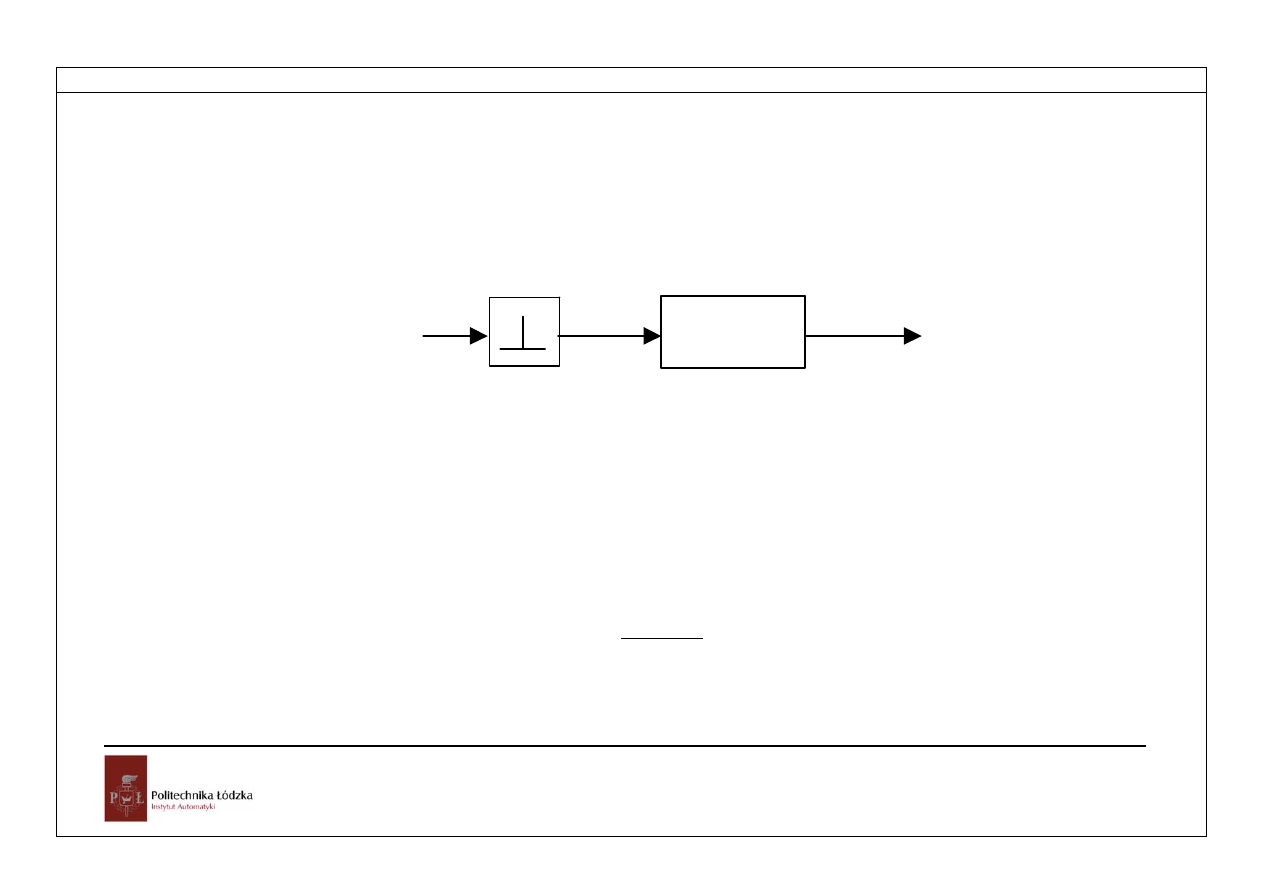
Przebieg w funkcji czasu przedstawiono na rys.2.8. Element formujący z impulsatorem w
tym przypadku jest ekstrapolatorem zerowego rzędu (ZOH – zero-order hold).
Rozdział 2
ε
*
(kT
s
)
0
kT
s
(k+1)T
s
t
ε
*
(kT
s
)
ε
d
(kT
s
)
ε
d
(t)
t
s
e
s
sT
−
−
1
ε
*
((k+1)T
s
)
kT
s
(k+1)T
s
ε(kT
s
)
Rys.2.8. Odpowiedź impulsowa elementu formującego impulsy prostokątne
ε(t)
ε
d
(k)
Rys.2.9. Symbol ekstrapolatora zerowego rzędu
31
Dyskretne Układy Regulacji
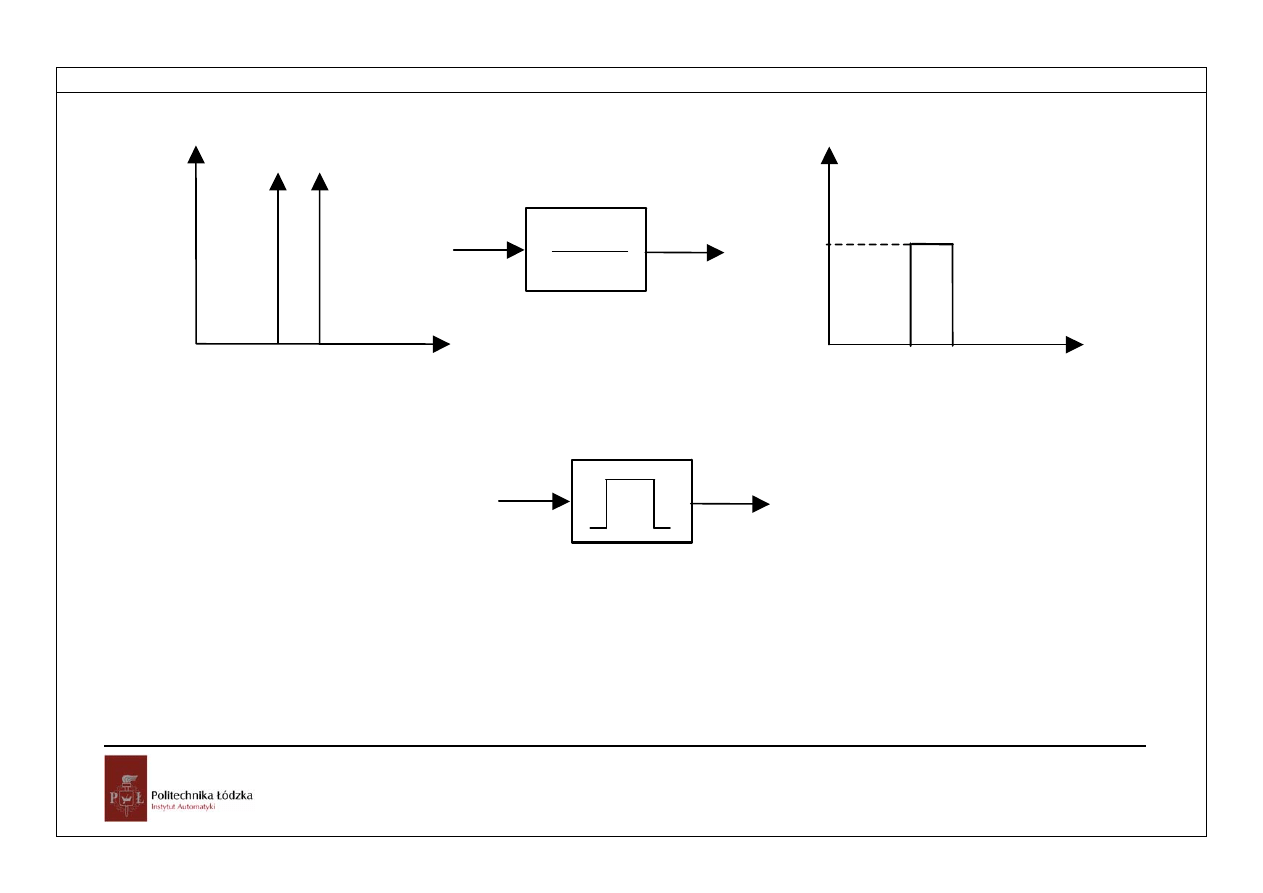
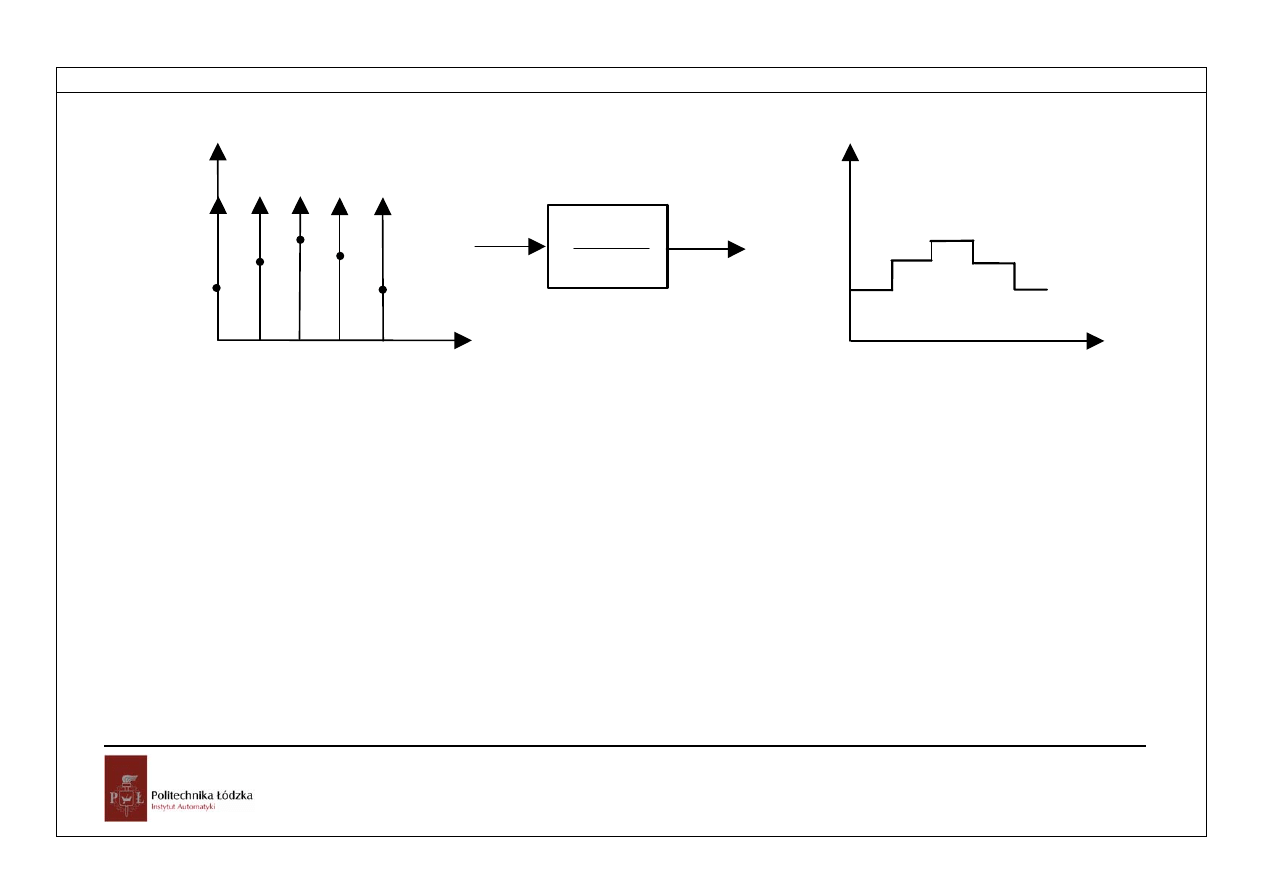
Odpowiedzią elementu o transmitancji G(s) na ciąg impulsów Diraca
ε
*
(t) jest funkcja
schodkowa
ε
d
(t)
Rozdział 2
ε
*
(t)
0 T
s
2T
s
3T
s
4T
s
t
ε
*
(t)
ε
d
(t)
ε
d
(t)
t
s
e
s
sT
−
−
1
Rys.2.10. Formowanie funkcji schodkowej
32
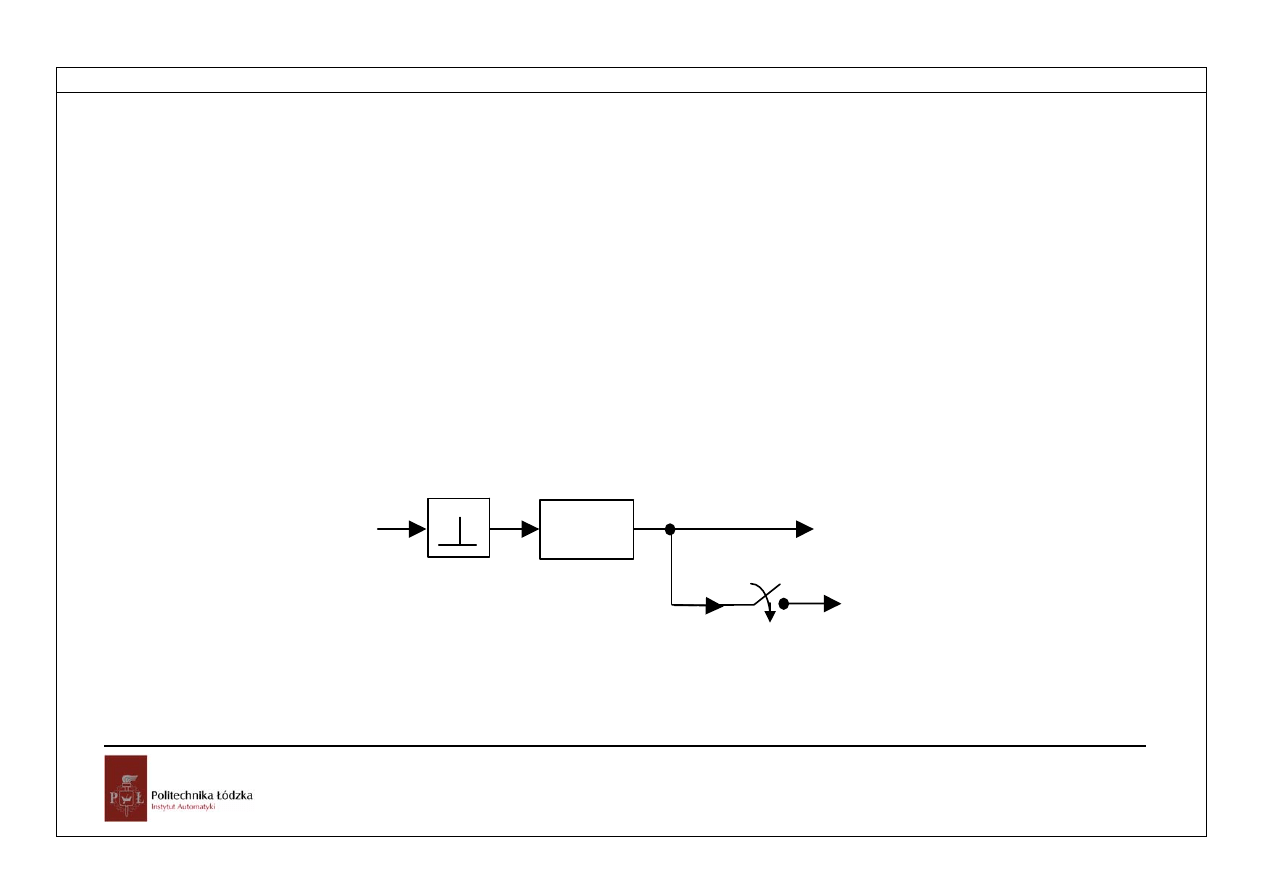
Dyskretne Układy Regulacji
W zasadzie dowolny ciągły układ dynamiczny może pełnić rolę elementu formującego.
Na rys.2.11 przedstawiono układ zamknięty z dyskretyzacją uchybu regulacji, w którym
obiekt regulacji wraz z elementem formującym, tworzy część ciągłą układu. Część ciągłą w
całości można uważać za obiekt formujący impulsy.
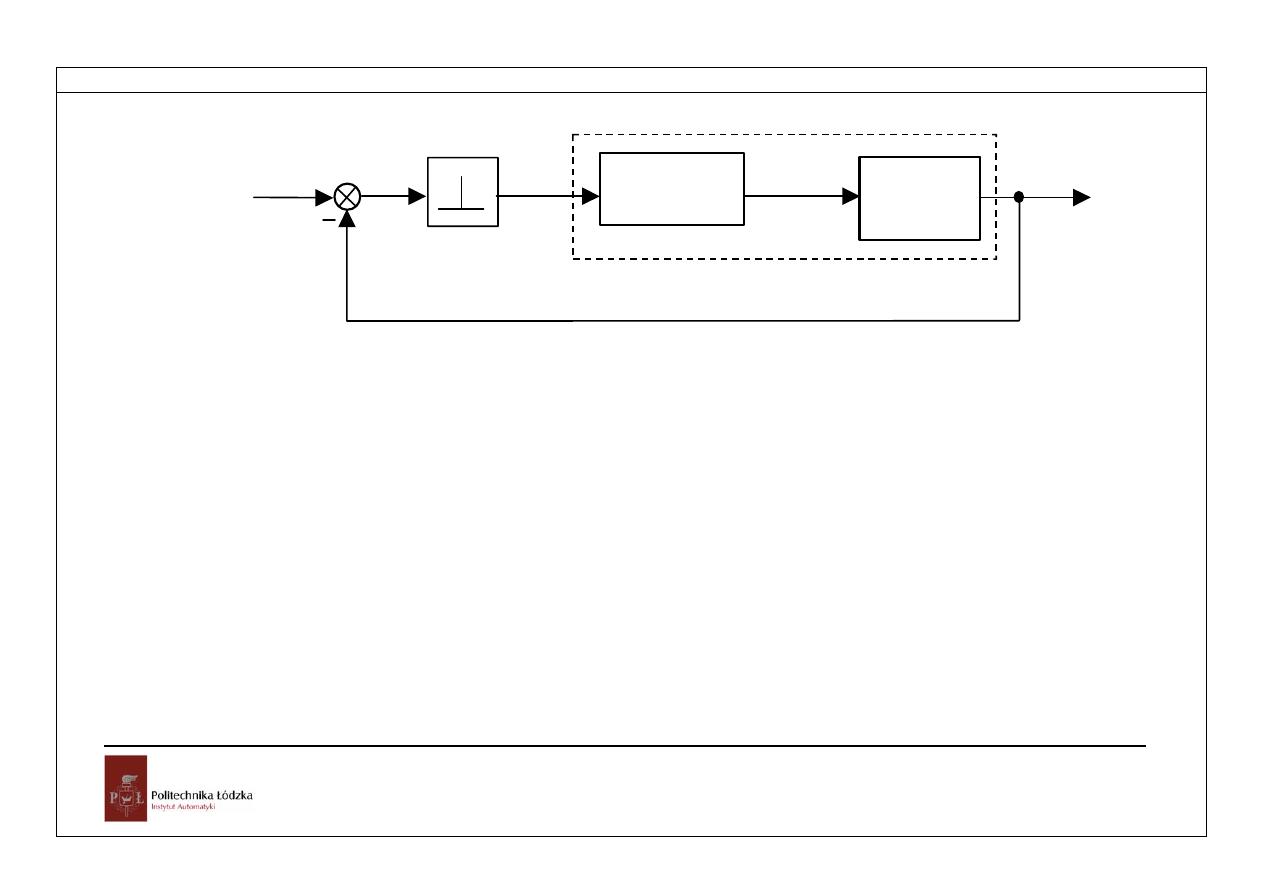
Rozdział 2
Element
formujący
Obiekt
regulacji
Impulsator
idealny
Część ciągła
ε(t)
y
0
(t)
ε
*
(t)
y(t)
33
Dyskretne Układy Regulacji
Rys.2.11. Schemat blokowy jednowymiarowego układu dyskretnego
Literatura
Literatura
[1] Ackerman J.: Regulacja impulsowa. WNT, Warszawa 1976
[2] Brzózka J.: Regulatory cyfrowe w automatyce. Mikom, Warszawa2002
[3] Brzózka J.: Regulatory i układy automatyki. Mikom, Warszawa2004
[4] Dębowski A.: Automatyka. Podstawy teorii. WNT, Warszawa 2008
[5] Gessing R.: Teoria sterowania. Część I. Układy liniowe. Skrypt uczelniany ' Politechniki Śląskiej nr 1302,
Gliwice 1987.
[6] Kaczorek T.: Teoria sterowania. T.1. PWN, Warszawa 1977
[7] Kaczorek T.: Teoria układów regulacji automatycznej. WNT, Warszawa 1977
[8] Laboratorium Teorii Sterowania i Podstaw Automatyki, Błachuta M. [red.]: (praca zbiorowa), Wydawnictwo
Politechniki Śląskiej nr 2082
[9] Markowski A., Kostro J., Lewandowski A.: Automatyka w pytaniach i odpowiedziach. WNT, Warszawa 1979
[10] Markowski J.: Elementy urządzenia i układy automatyki. WSiP, Warszawa 2006
[11] Mutambara A.: Design and Analysis of Control Systems. CRC Press, New York, 1999
[12] Niederliński A.: Systemy i sterowanie. Wyd. Politechniki Śląskiej, skrypt Nr 746, Gliwice 1978
[13] Ogata K.: Discrete – time control systems. Prentice Hall Inter., Englewood Cliffs 1987
[14] PN-88 M-42000 Automatyka i pomiary przemysłowe. Terminologia
[15] Rumatowski K.: podstawy automatyki. Część 2. Układy dyskretne i stochastyczne. Wydawnictwo Politechniki
Poznańskiej, Poznań 2005
[16] Schönfeld R.: Digitale Regelung elektrischer Abtriebe. VEB Verlag, Berlin 1987
[17] Schönfeld R.: Grundlagen der automatischen Steuerung. VEB Verlag, Berlin 1984
[18] Sinha N.K.: Controls systems. John Wiley &Sons, New York 1995
34
Dyskretne Układy Regulacji
[19] Takahashi Y., Rabins M., Auslander D.: Sterowanie i systemy dynamiczne. WNT, Warszawa 1976
Literatura
[20] Tewari A.: Modern Control Design with Matlab and Simulink. John Wiley & Sons Ltd, New York 2002
[21] Wajs K.: Linie pierwiastkowe w automatyce. WNT, Warszawa 1973
[22] http://pl.wikipedia.org/wiki/SCADA
[23] http://pl.wikipedia.org/wiki/System_czasu_rzeczywistego
35
Dyskretne Układy Regulacji
Document Outline
Wyszukiwarka
Podobne podstrony:
6 Dyskretne układy regulacji, rozdział 9 Jakość dyskretnych układów regulacji
4 Dyskretne układy regulacji, rozdział 6 Podstawowe struktury układów regulacji
5 Dyskretne układy regulacji, rozdział 7 Struktury regulatorów dyskretnych
2 Dyskretne układy regulacji, rozdział 3 i 4 Funkcje dyskretne Równania różnicowe
3 Dyskretne układy regulacji, rozdział 5 Stabilność układów dyskretnych
4 Dyskretne uklady regulacji, Nieznany (2)
5 Dyskretne uklady regulacji, Nieznany (2)
2 Dyskretne uklady regulacji, Nieznany
3 Dyskretne uklady regulacji, Nieznany (2)
4 Dyskretne uklady regulacji, Nieznany (2)
UKŁADY REGULACJI, układ regulacji PID
9 Układy regulacji położenia złącz manipulatora
Zadania 6, układy regulacji i dynamika AiS 2013
Ciągłe układy regulacji
Układy regulacji w?ntrali klimatyzacyjnej
układy regulacji podstawy(1)
więcej podobnych podstron