Janusz Kacerka
Dyskretne Układy
Regulacji
————————————————————————————————————————
Semestr 5 Elektrotechnika
Rozdział 6
Spis treści
2
Dyskretne Układy Regulacji
Rozdział 6
6 Podstawowe struktury układów regulacji
Układy regulacji składają się z członów dyskretnych i ciągłych. Zawierają, co najmniej
jeden lub więcej elementów próbkujących, pracujących synchronicznie z okresem T
s
.
Jeśli zachodzi potrzeba, można bloki ciągle przedstawić w postaci jednego członu o
wypadkowej transmitancji. Bloki dyskretne można łączyć tylko z dyskretnymi,
wyznaczając ich wypadkowa transmitancję. Przed połączeniem bloków ciągłych z
dyskretnymi należy wyznaczyć transmitancje dyskretne bloków ciągłych. Na kolejnych
rysunkach przedstawiono różne postaci układów dyskretnych [17].
3
Dyskretne Układy Regulacji
Rozdział 6
y(t)
T
s
y(kT
s
)
G
R
(s
ε(t)
ε
*
(t)
y(t)
y
0
(t)
G
0
(s
u(t)
1-e
-sTs
s
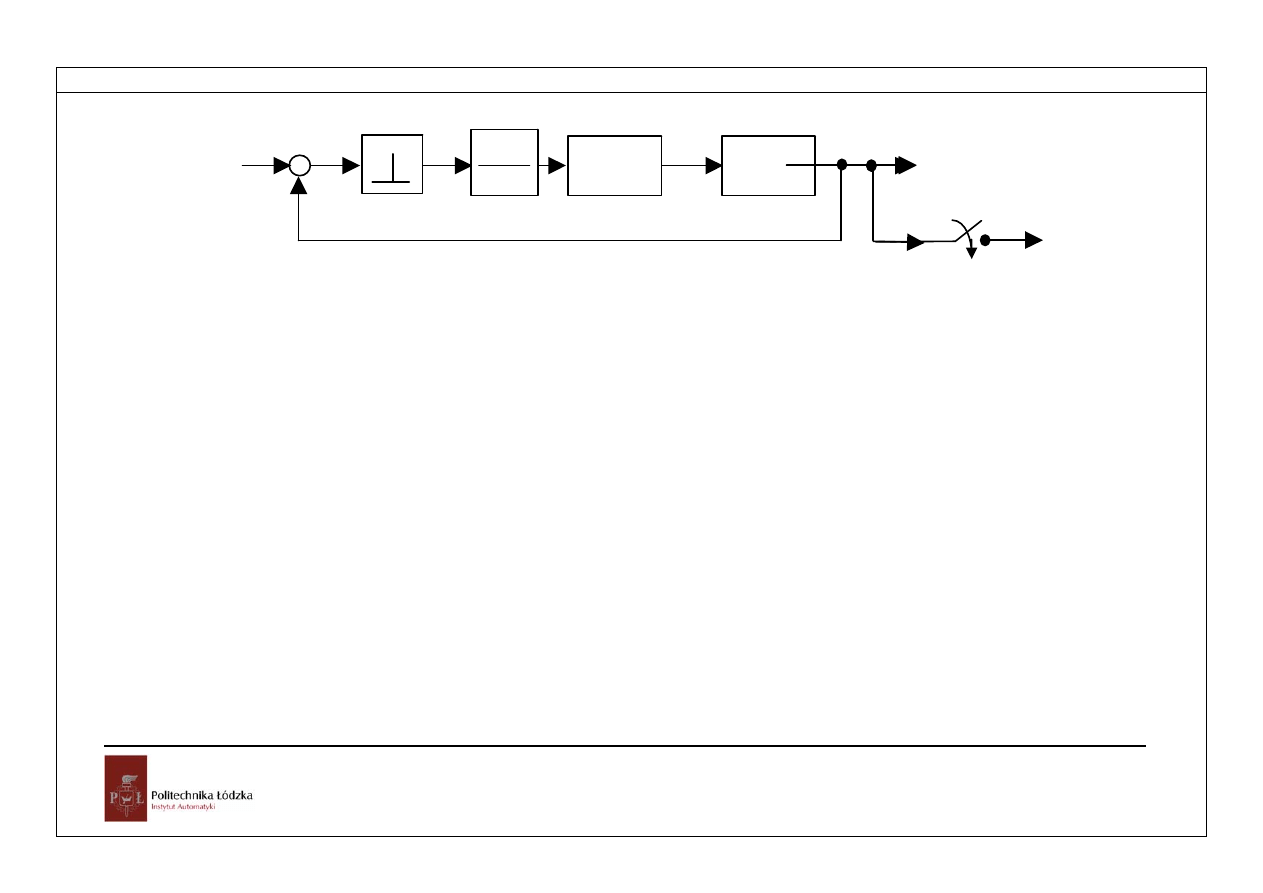
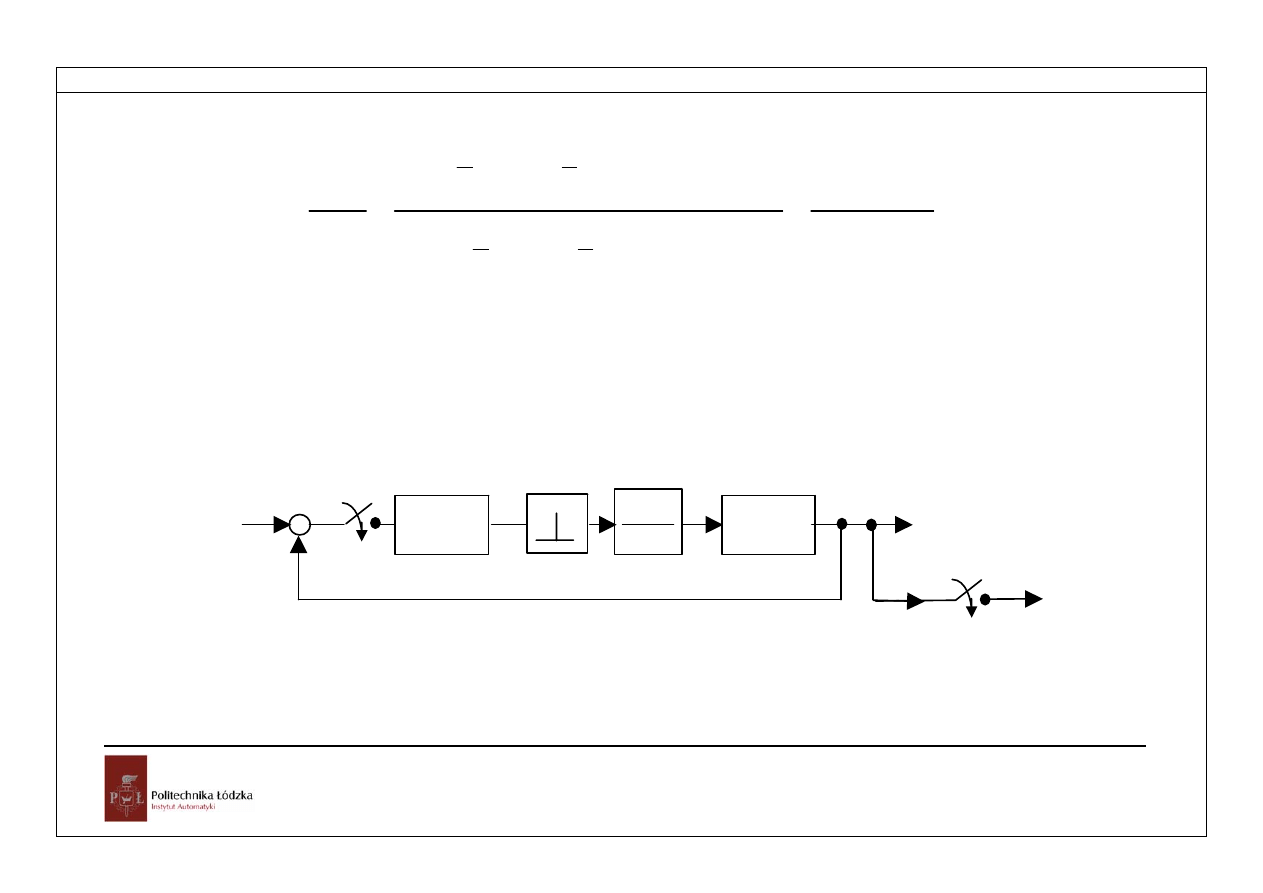
Rys.6.1.Układ z próbkowaniem wielkości zadanej i regulowanej
4
Dyskretne Układy Regulacji
Uchyb regulacji jest zapamiętywany w rejestrze i przekazywany dalej jako sygnał
wyjściowy przetwornika D/A (przetwornik cyfrowo-analogowy). Regulator G
R
i obiekt G
0
są członami ciągłymi. Transmitancja dyskretna układu przedstawionego na rys.6.1 ma
następującą postać
Rozdział 6
( )
( )
( )
( ) ( )
( ) ( )
( )
( )
z
G
G
z
G
G
s
G
s
G
s
L
Z
z
s
G
s
G
s
L
Z
z
z
y
z
y
z
G
R
R
kT
t
R
kT
t
R
s
s
0
0
0
1
0
1
0
1
1
1
1
1
1
1
1
+
=
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
+
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
=
=
=
−
=
−
,
(6.1)
Można zauważyć, że przetwornik cyfrowo-analogowy wprowadza sygnał schodkowy.
We wzorze zaznaczono w nawiasach klamrowych przejście od sygnału ciągłego w
postaci odpowiedzi impulsowej do postaci dyskretnej (t=kT
s
).
y(t)
T
s
y(kT
s
)
ε(t)
ε
i
(t)
y(t)
y
0
(t)
G
0
(s
u(t)
1-e
-sTs
s
G
R
(s
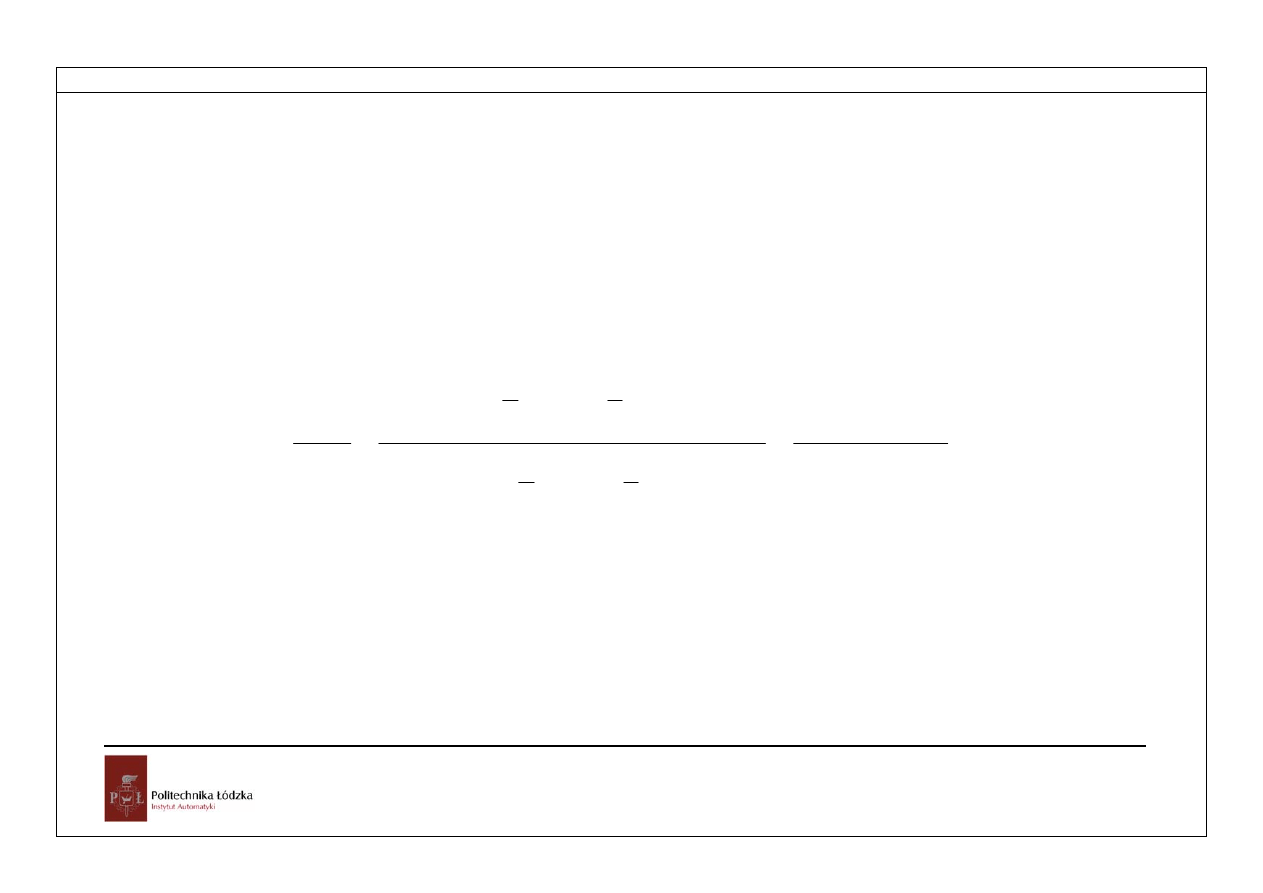
Rys.6.2.Układ z regulatorem dyskretnym
5
Dyskretne Układy Regulacji
Rozdział 6
W układzie z rys.6.2 regulator ciągły został zamieniony na regulator dyskretny.
Próbkowany sygnał uchybu zostaje przetworzony według algorytmu zapisanego w
regulatorze dyskretnym. Sygnał wyjściowy przetwornika D/A jest sygnałem
nastawiającym obiektu regulacji u(t). Transmitancja dyskretna układu przedstawionego na
rys.6.2 ma następującą postać
( )
( )
( )
( )
( )
( )
( )
( ) ( )
( ) ( )
z
G
z
G
z
G
z
G
s
G
s
L
Z
z
z
G
s
G
s
L
Z
z
z
G
z
y
z
y
z
G
R
R
kT
t
R
kT
t
R
s
s
0
0
0
1
0
1
0
1
1
1
1
1
1
1
1
+
=
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
+
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
=
=
=
−
=
−
,
(6.2)
6
Dyskretne Układy Regulacji
G
R
(z) jest transmitancja dyskretną regulatora i jednocześnie określa algorytm
działania regulatora.
Rozdział 6
T
s
y(kT
s
)
ε(t)
y(t)
y
0
(t)
G
R
(s
G
0
(s
1-e
-sTs
s
1-e
-sTs
s
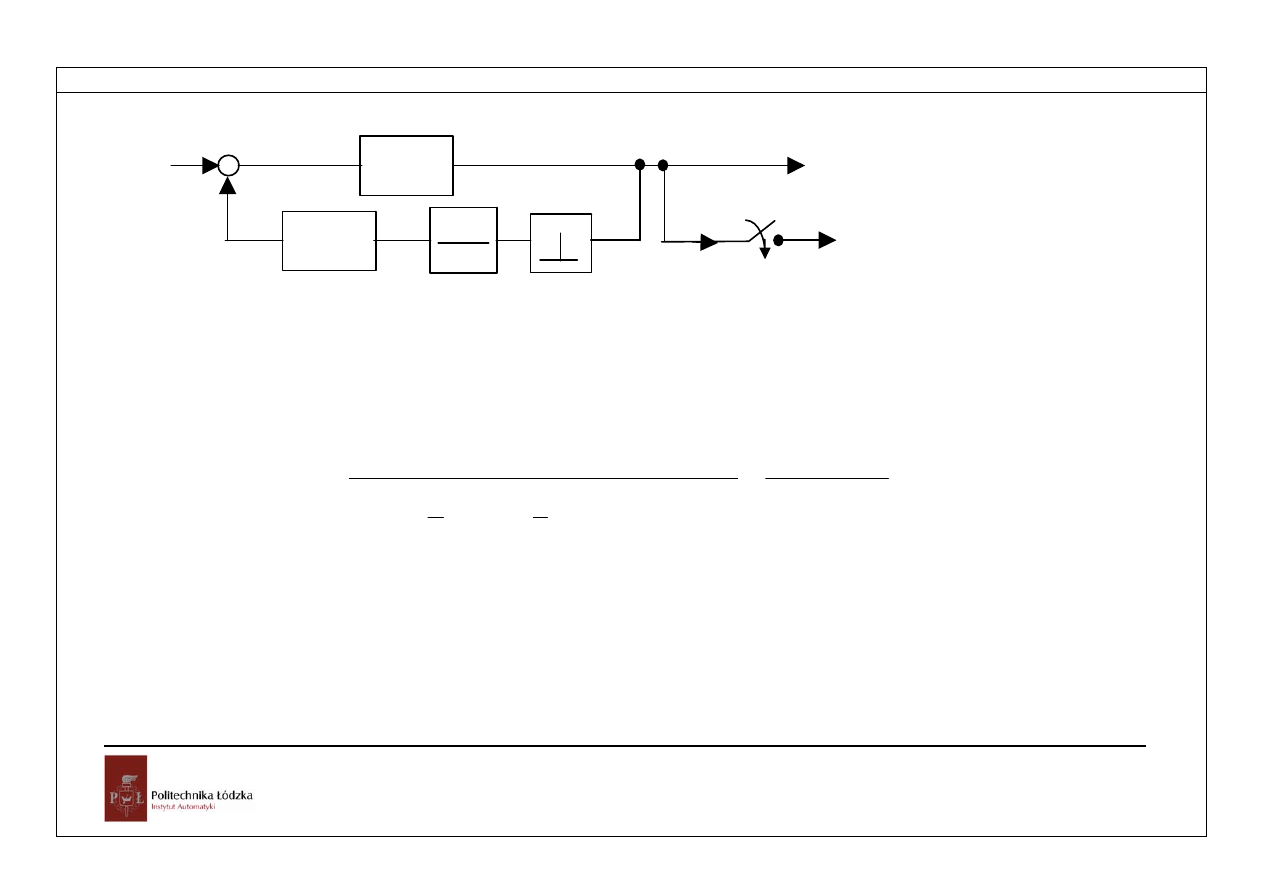
Rys.6.3.Układ z dyskretnym pomiarem wielkości regulowanej
W przypadku układu z rys.6.3 nie udaje się wyznaczyć transmitancji. Natomiast można
określić transformatę dyskretną sygnału wyjściowego
( )
( ) ( )
[
]
{
}
( ) ( )
( )
( )
z
G
G
z
y
G
s
G
s
G
s
L
Z
z
s
y
s
G
L
Z
z
y
R
kT
t
R
kT
t
s
s
0
0
0
0
1
0
0
1
1
1
1
1
1
+
=
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
=
−
=
−
,
(6.3)
7
Dyskretne Układy Regulacji
Podobna sytuacja wystąpi w układzie kolejnym.
Rozdział 6
T
s
y(kT
s
)
ε(t)
y(t)
y
0
(t)
G
R
(s
G
0
(s
1-e
-sTs
s
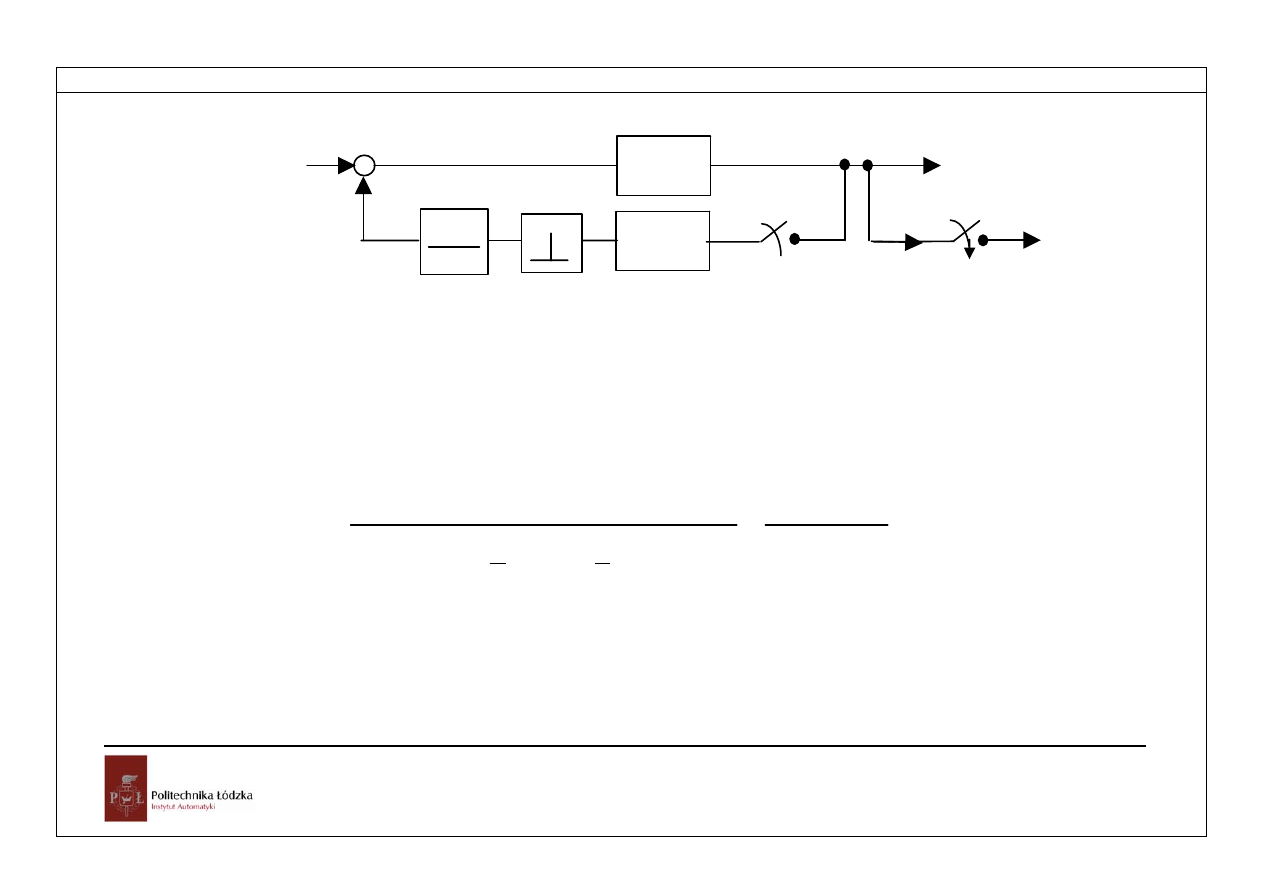
Rys.6.4.Układ z regulatorem dyskretnym w torze sprzężenia
Na rys.6.3 regulator w torze sprzężenia jest członem ciągłym. W przypadku układu
przedstawionego na rys.6.4 w torze sprzężenia występuje regulator dyskretny.
Transformata dyskretna sygnału wyjściowego ma postać
( )
( ) ( )
[
]
{
}
( )
( )
( )
( )
z
G
G
z
y
G
s
G
s
L
Z
z
z
G
s
y
s
G
L
Z
z
y
R
kT
t
R
kT
t
s
s
0
0
0
0
1
0
0
1
1
1
1
1
1
+
=
⎭
⎬
⎫
⎩
⎨
⎧
⎥⎦
⎤
⎢⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
=
−
=
−
,
(6.4)
8
Dyskretne Układy Regulacji
Literatura
Literatura
[1] Ackerman J.: Regulacja impulsowa. WNT, Warszawa 1976
[2] Brzózka J.: Regulatory cyfrowe w automatyce. Mikom, Warszawa2002
[3] Brzózka J.: Regulatory i układy automatyki. Mikom, Warszawa2004
[4] Dębowski A.: Automatyka. Podstawy teorii. WNT, Warszawa 2008
[5] Gessing R.: Teoria sterowania. Część I. Układy liniowe. Skrypt uczelniany ' Politechniki Śląskiej nr 1302,
Gliwice 1987.
[6] Kaczorek T.: Teoria sterowania. T.1. PWN, Warszawa 1977
[7] Kaczorek T.: Teoria układów regulacji automatycznej. WNT, Warszawa 1977
[8] Laboratorium Teorii Sterowania i Podstaw Automatyki, Błachuta M. [red.]: (praca zbiorowa), Wydawnictwo
Politechniki Śląskiej nr 2082
[9] Markowski A., Kostro J., Lewandowski A.: Automatyka w pytaniach i odpowiedziach. WNT, Warszawa 1979
[10] Markowski J.: Elementy urządzenia i układy automatyki. WSiP, Warszawa 2006
[11] Mutambara A.: Design and Analysis of Control Systems. CRC Press, New York, 1999
[12] Niederliński A.: Systemy i sterowanie. Wyd. Politechniki Śląskiej, skrypt Nr 746, Gliwice 1978
[13] Ogata K.: Discrete – time control systems. Prentice Hall Inter., Englewood Cliffs 1987
[14] PN-88 M-42000 Automatyka i pomiary przemysłowe. Terminologia
[15] Rumatowski K.: podstawy automatyki. Część 2. Układy dyskretne i stochastyczne. Wydawnictwo Politechniki
Poznańskiej, Poznań 2005
[16] Schönfeld R.: Digitale Regelung elektrischer Abtriebe. VEB Verlag, Berlin 1987
9
Dyskretne Układy Regulacji
[17] Schönfeld R.: Grundlagen der automatischen Steuerung. VEB Verlag, Berlin 1984
Literatura
[18] Sinha N.K.: Controls systems. John Wiley &Sons, New York 1995
[19] Takahashi Y., Rabins M., Auslander D.: Sterowanie i systemy dynamiczne. WNT, Warszawa 1976
[20] Tewari A.: Modern Control Design with Matlab and Simulink. John Wiley & Sons Ltd, New York 2002
[21] Wajs K.: Linie pierwiastkowe w automatyce. WNT, Warszawa 1973
[22] http://pl.wikipedia.org/wiki/SCADA
[23] http://pl.wikipedia.org/wiki/System_czasu_rzeczywistego
10
Dyskretne Układy Regulacji
Document Outline
Wyszukiwarka
Podobne podstrony:
5 Dyskretne uklady regulacji, Nieznany (2)
2 Dyskretne uklady regulacji, Nieznany
3 Dyskretne uklady regulacji, Nieznany (2)
6 Dyskretne układy regulacji, rozdział 9 Jakość dyskretnych układów regulacji
1 Dyskretne układy regulacji, rozdział 1 i 2, Wstęp Dyskretny układ regulacji
4 Dyskretne układy regulacji, rozdział 6 Podstawowe struktury układów regulacji
5 Dyskretne układy regulacji, rozdział 7 Struktury regulatorów dyskretnych
2 Dyskretne układy regulacji, rozdział 3 i 4 Funkcje dyskretne Równania różnicowe
3 Dyskretne układy regulacji, rozdział 5 Stabilność układów dyskretnych
matematyka dyskretna w 2 id 283 Nieznany
8 zasilanie odbiorcow uklady si Nieznany (2)
5 4 Charakterystyki regulacyjne Nieznany (2)
zmienne losowe dyskretne id 591 Nieznany
Matematyka dyskretna id 283281 Nieznany
Matematyka dyskretna prawd id 7 Nieznany
4 RegulaminOrganizacyjnyCZSWlis Nieznany (2)
14 elementy i uklady elektronic Nieznany
88 Nw 02 Proste uklady elektron Nieznany
więcej podobnych podstron