Janusz Kacerka
Dyskretne Układy
Regulacji
————————————————————————————————————————
Semestr 5 Elektrotechnika
Rozdział 7
Spis treści
2
Dyskretne Układy Regulacji
Rozdział 7
7. Struktury regulatorów dyskretnych
Algorytmy realizowane przez regulatory dyskretne mogą realizować najrozmaitsze
zadania. Typowa jest realizacja algorytmów opartych na algorytmach regulatorów
ciągłych PID [4]. Przyczyny stosowania algorytmów przybliżających transmitancję
dyskretną mogą być następujące [1]:
- W praktyce inżynierskiej ustalono doświadczalne nastawy ciągłych regulatorów PID
w przypadku procesów, których analiza matematyczna może być utrudniona. Nastawy
mogą być nadal wykorzystywane. Parametry regulatorów mogą być przestrajane w czasie
ruchu. Po wprowadzeniu sterowania komputerowego personel może posługiwać się tymi
samymi nastawami, co dla układów ciągłych.
3
Dyskretne Układy Regulacji
- Stosowane są awaryjnie urządzenia analogowe, które zaczynają pracować w
przypadku awarii układów dyskretnych. Przełączanie powinno odbywać się bezpiecznie, co
Rozdział 7
gwarantuje algorytm komputerowy zbliżony do algorytmu regulatorów ciągłych.
7.1 Struktury regulatorów PID
Transmitancja ciągłą regulatora PID z aproksymacją różniczkowania za pomocą członu
różniczkującego rzeczywistego ma postać:
( )
1
1
+
+
+
=
sT
s
K
s
K
K
s
G
D
I
P
PID
,
(7.1)
4
Dyskretne Układy Regulacji
Dla stałej czasowej elementu różniczkującego rzeczywistego odpowiednio mniejszej
od współczynnika K
D
otrzymuje się dobre przybliżenie elementu różniczkującego
idealnego. Postać transmitancji dyskretnej można uzyskać np. stosując metodę Tustina
(4.64)
Rozdział 7
( )
(
)
(
) (
)
1
1
2
1
2
1
1
2
1
1
1
1
2
1
+
+
−
−
+
−
+
+
=
⎥
⎦
⎤
⎢
⎣
⎡
+
+
+
=
+
−
=
z
T
z
T
z
K
z
z
T
K
K
sT
s
K
s
K
K
z
G
s
D
s
I
P
z
z
T
s
D
I
P
PID
s
,
(7.2)
Realizacja algorytmu dyskretnego może przebiegać w różny sposób w zależności od
sposobu wprowadzenia różnic do równania regulatora. W pracy [17] zaproponowano
następujący sposób. Z równania regulatora o postaci
( )
( )
( )
( )
⎥
⎦
⎤
⎢
⎣
⎡
ε
+
τ
τ
ε
+
ε
=
∫
t
D
I
P
dt
t
d
T
d
T
t
K
t
u
0
1
,
(7.3)
Po zróżniczkowaniu względem czasu otrzymano
5
Dyskretne Układy Regulacji
( )
( )
( )
( )
⎥
⎦
⎤
⎢
⎣
⎡
ε
+
ε
+
ε
=
2
2
1
dt
t
d
T
t
T
dt
t
d
K
dt
t
du
D
I
P
,
(7.4)
Rozdział 7
Wprowadzenie różnic do wzoru (7.4) prowadzi do przybliżonego wyrażenia
(
) ( )
(
) ( )
( )
(
) ( ) ( ) (
)
[
]
(
) ( )
(
)
( )
(
)
1
2
1
1
1
1
1
1
1
1
1
2
−
ε
+
ε
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
+
ε
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
+
⎥
⎦
⎤
⎢
⎣
⎡
−
ε
−
ε
−
ε
−
+
ε
+
ε
+
ε
−
+
ε
≈
−
+
n
T
T
K
n
T
T
T
T
K
n
T
T
K
n
u
n
u
T
n
n
n
n
T
n
T
T
n
n
K
T
n
u
n
u
s
D
P
s
D
I
s
P
s
D
P
s
D
I
s
P
s
,
(7.5)
6
Dyskretne Układy Regulacji
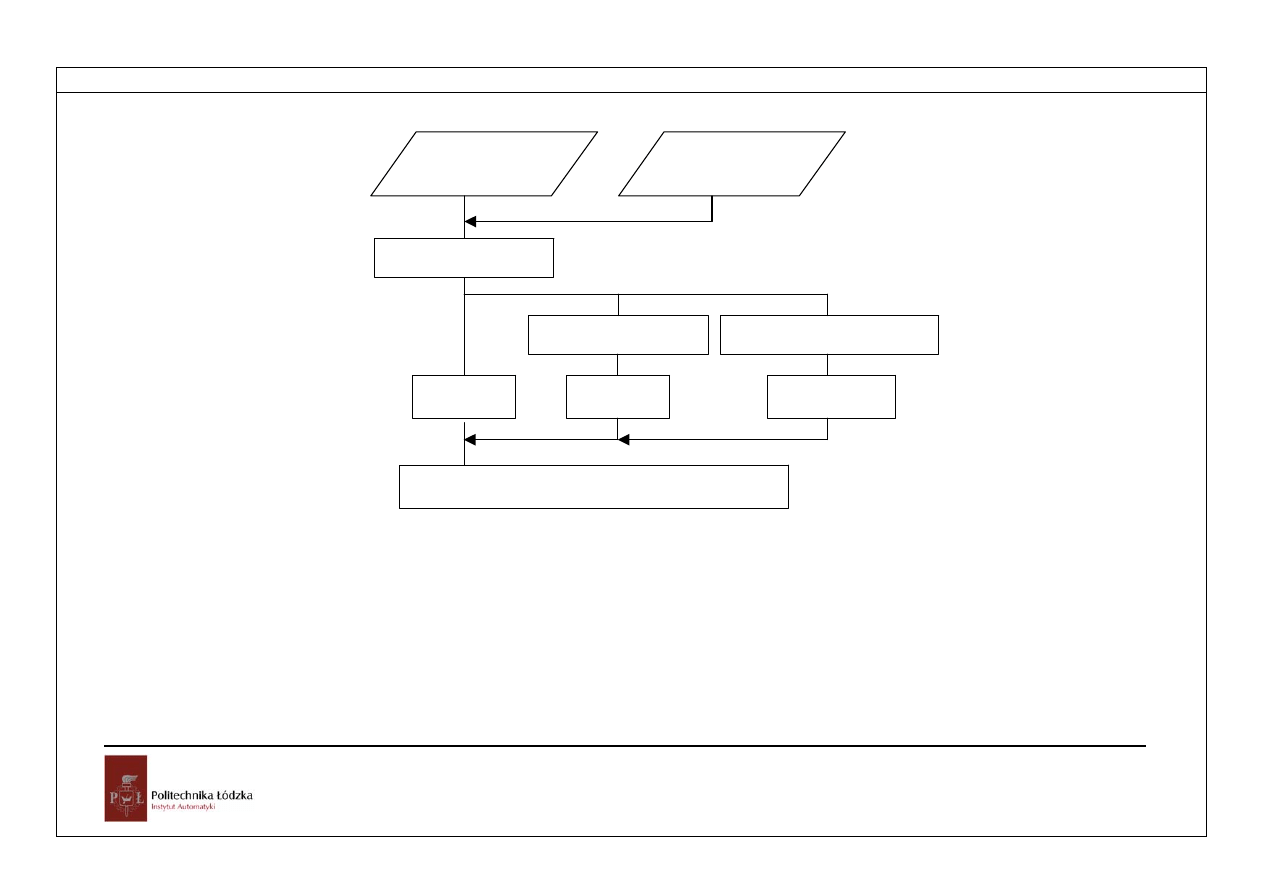
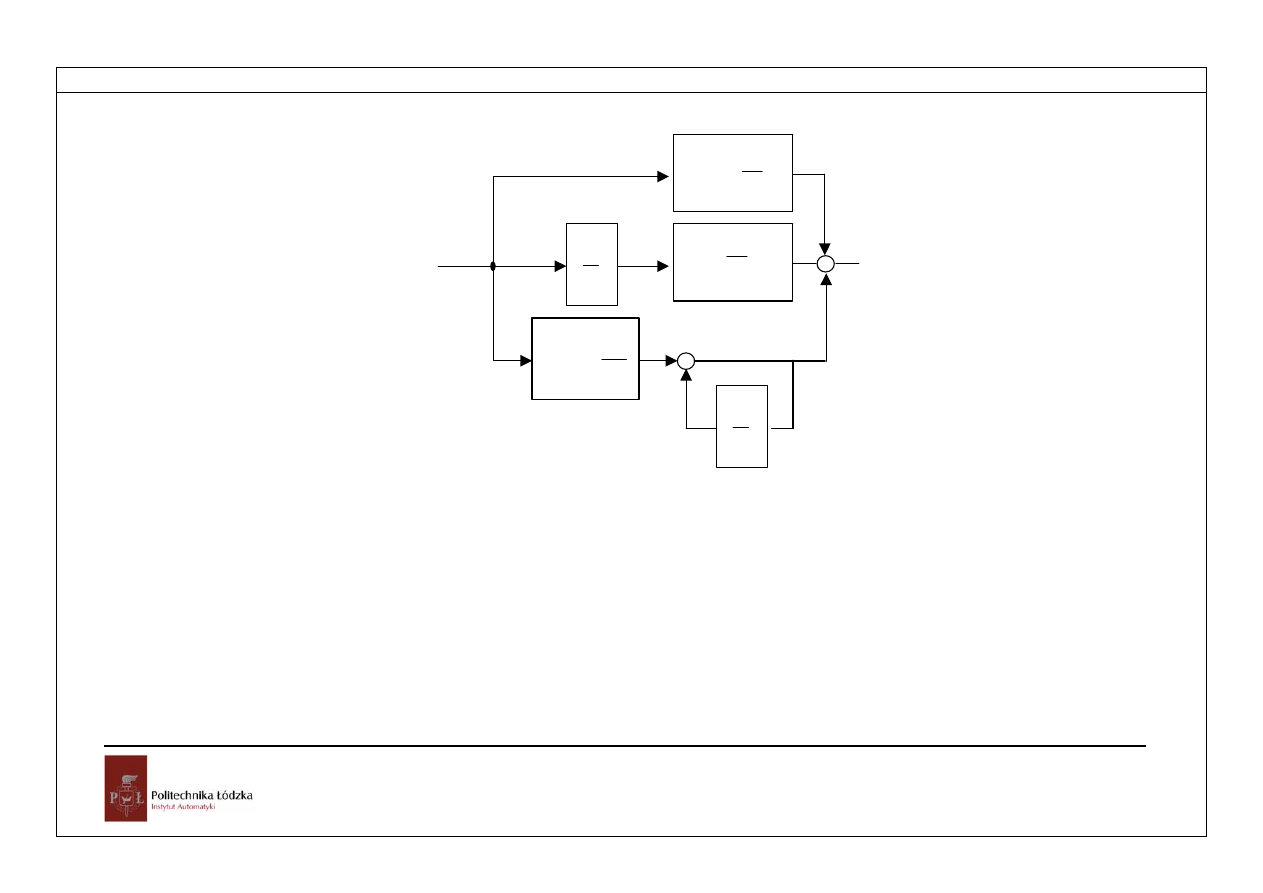
Na rysunku 7.1 przedstawiono schemat blokowy algorytmu regulatora PID narysowany
według zależności (7.5)
Rozdział 7
Wczytanie parametrów
Wczytanie
ε(n+1)
Wczytanie z rejestru
ε(n), ε(n-1),u(n)
Δε: ε(n+1)- ε(n)
ε: ε(n+1)
ΔΔε: ε(n+1)- 2ε(n)+ ε(n-1)
K
P
Δε
K
P
T
D
/T
s*
ΔΔε:
ε(n+1)=K
p
T
s
/T
I
*
ε(n)+ K
P
Δε+ K
P
T
D
/T
s*
ΔΔε
K
p
T
s
/T
I
*
ε
Rys.7.1. Schemat blokowy algorytmu PID
7
Dyskretne Układy Regulacji
Równanie regulatora (7.3) można zapisać w przybliżony sposób następująco [4]
Rozdział 7
( )
( )
( )
( ) (
)
⎥
⎦
⎤
⎢
⎣
⎡
−
ε
−
ε
+
ε
+
ε
≈
∑
−
s
D
n
i
s
I
P
T
n
n
T
T
n
T
n
K
n
u
1
1
0
(7.6)
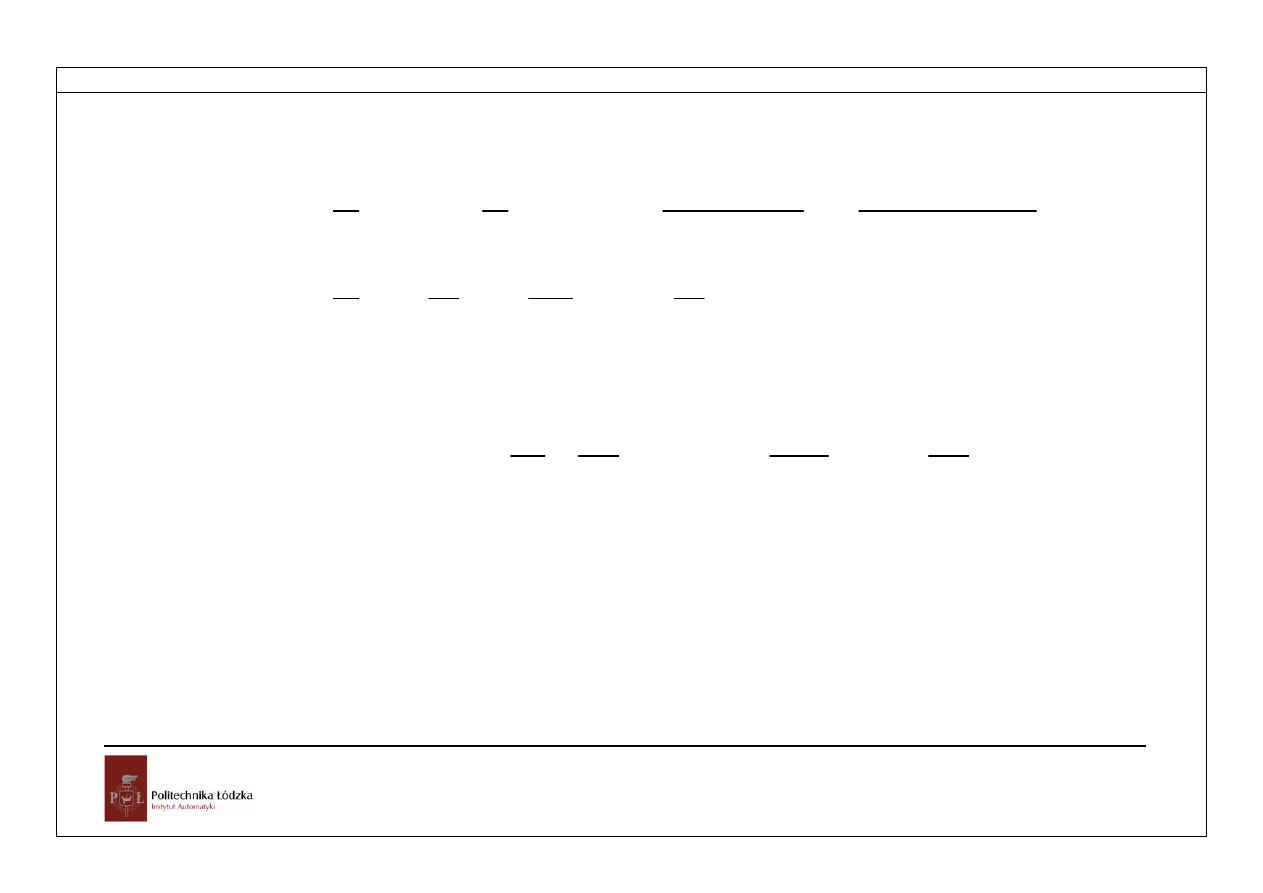
Struktura równoległa regulatora wynika ze zsumowania składników wyrażenia (7.6),
przy czym sumę funkcji dyskretnej – analog całki – realizuje się uwzględniając fakt, że
suma dla chwili n jest sumą funkcji dla chwili n-1 i składnika zależnego od wartości
ε(n)
8
Dyskretne Układy Regulacji
( )
n
T
T
K
n
Suma
n
Suma
I
s
p
ε
+
−
=
)
1
(
)
(
(7.7)
Rozdział 7
Suma(n)
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
s
D
P
T
T
K 1
s
D
P
T
T
K
−
z
1
I
s
P
T
T
K
z
1
Suma(n-1)
u(n)
ε(n)
ε(n-1)
Rys.7.2. Schemat blokowy algorytmu PID wg (7.6),(7.7)
9
Dyskretne Układy Regulacji
Strukturę szeregową regulatora można wyznaczyć wyznaczając różnicę sygnału
dyskretnego u(n) i u(n-1) a następnie wprowadzić sumę takiej różnicy [4]. Z wyrażenia na
sygnał wyjściowy regulatora u(n) (7.6) otrzymuje się
Rozdział 7
( ) (
)
( ) (
)
( )
( )
( ) (
)
(
) (
)
( ) (
)
( )
( )
(
)
(
)
⎥
⎦
⎤
⎢
⎣
⎡
−
ε
+
−
ε
−
ε
+
ε
+
−
ε
−
ε
=
=
⎥
⎦
⎤
⎢
⎣
⎡
−
ε
−
−
ε
−
−
ε
−
ε
+
ε
−
ε
+
−
ε
−
ε
=
=
−
−
∑
∑
−
−
−
2
1
2
1
2
1
1
1
1
1
1
1
0
0
n
T
T
n
T
T
n
T
T
n
T
T
n
n
K
T
n
n
T
T
n
n
T
T
n
T
T
n
T
n
n
K
n
u
n
u
s
D
s
D
s
D
I
s
P
s
D
s
D
n
i
s
I
n
i
s
I
P
(7.8)
Po przekształceniu Z otrzymuje się
( ) (
)
[
]
( )
z
E
T
T
z
T
T
z
T
T
T
T
K
n
u
n
u
Z
s
D
s
D
s
D
I
s
P
⎥
⎦
⎤
⎢
⎣
⎡
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
−
−
−
−
2
1
2
1
1
1
(7.9)
10
Dyskretne Układy Regulacji
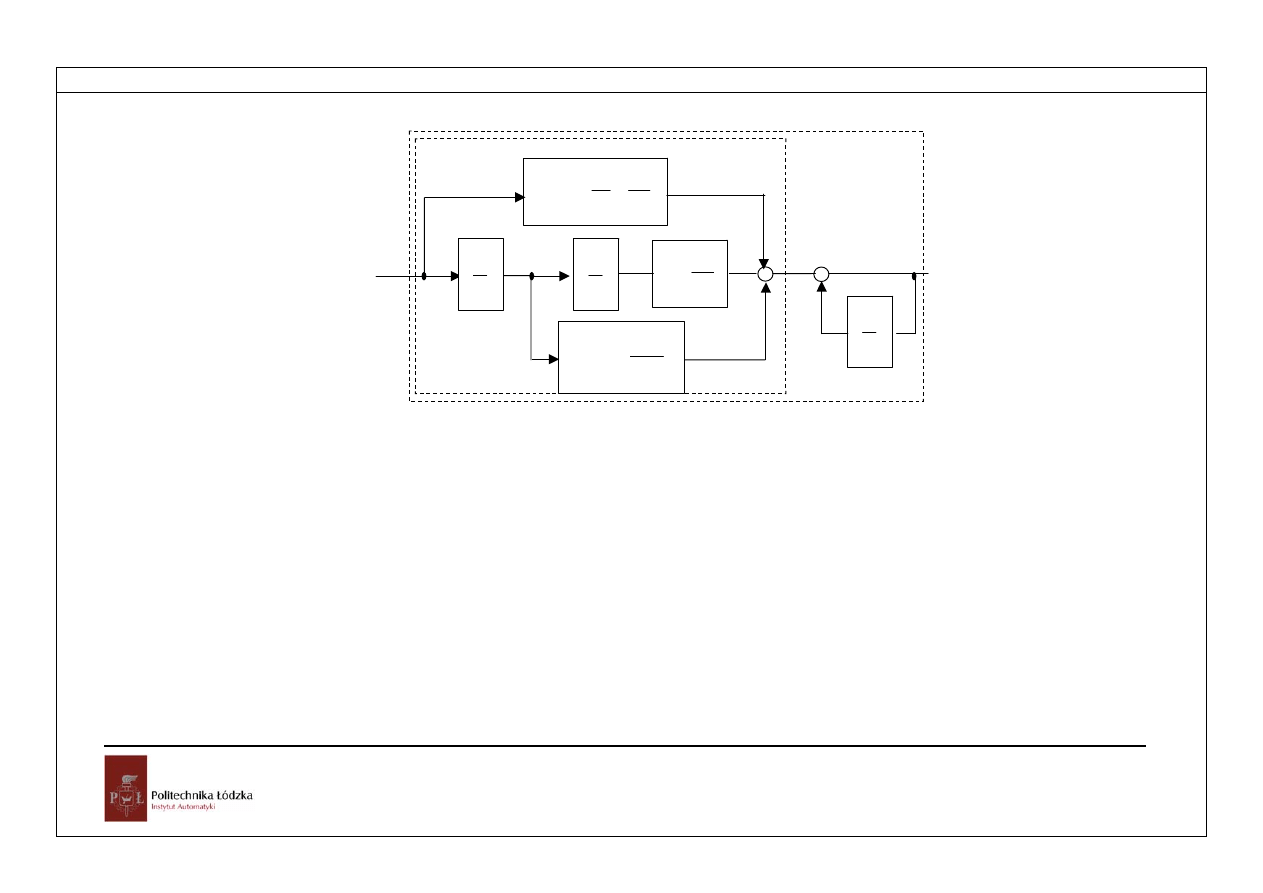
Połączenie bloku o podanej transmitancji szeregowo z blokiem obliczającym sumę jak
na rys.7.2 prowadzi do struktury szeregowej regulatora PID, przy czym część (7.9)
stanowi algorytm prędkościowy regulatora a szeregowe połączenie z członem całkującym
algorytm pozycyjny.
Rozdział 7
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
s
D
I
s
P
T
T
T
T
K 1
s
D
P
T
T
K
z
1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
s
D
P
T
T
K
2
1
E(z)
z
-1
E(z)
U(z)
z
1
z
1
Algorytm
prędkościowy
Algorytm
pozycyjny
Rys.7.3. Schemat blokowy algorytmu PID wg (7.9)
11
Dyskretne Układy Regulacji
Algorytm prędkościowy stosuje się wówczas, gdy urządzenie wykonawcze jest
siłownikiem elektrycznym, pneumatycznym lub hydraulicznym o działaniu całkującym, w
którym położenie elementu wykonawczego zmienia się skokowo w chwilach próbkowania
o wartość przyrostu sygnału wyjściowego regulatora. Transmitancja dyskretna obiektu z
siłownikiem ma wówczas postać
Rozdział 7
( )
( )
⎪⎭
⎪
⎬
⎫
⎪⎩
⎪
⎨
⎧
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
=
=
−
s
nT
t
s
s
s
G
L
Z
z
G
G
0
1
0
(7.10)
7.2 Regulator dyskretny z anti-windup
12
Dyskretne Układy Regulacji
Przedstawione algorytmy regulatorów miały charakter liniowy. W praktyce stosuje się
ograniczenie maksymalnej wartości sygnału wyjściowego regulatora i wówczas wymaga
się ograniczenia narastania zmiennej stanu reprezentującej działanie całkujące
(sumowanie) regulatora. Algorytm będzie wówczas algorytmem o charakterze
nieliniowym. Ograniczenie nosi nazwę anti-windup. Na rys.7.4 przedstawiono realizację
takiego ograniczenia w regulatorze PI o strukturze równoległej.
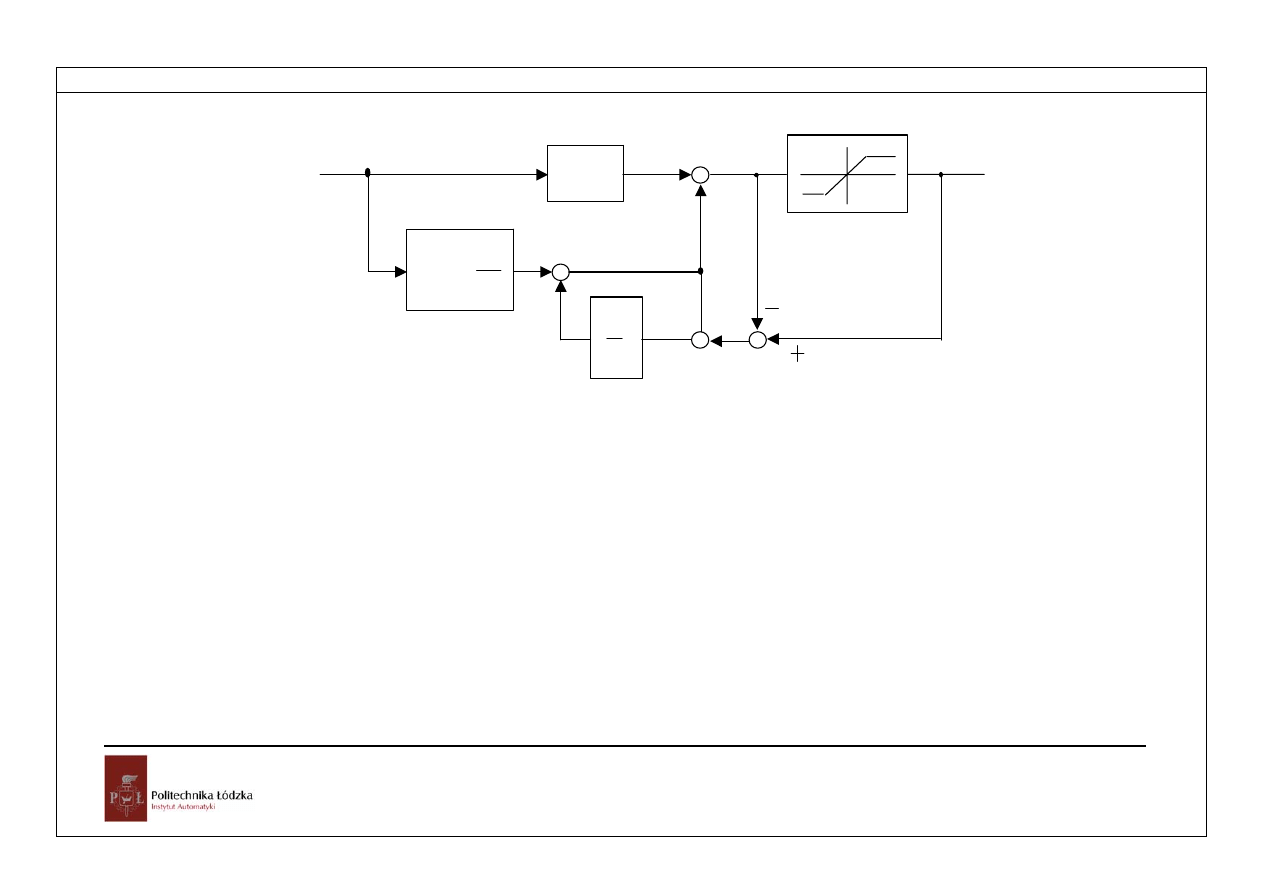
Rozdział 7
Suma(n)
P
K
I
s
P
T
T
K
z
1
Suma(n-1)
u(n)
ε(n)
Umax
Umin)
Rys.7.4. Schemat blokowy algorytmu PI z układem anti-windup
13
Dyskretne Układy Regulacji
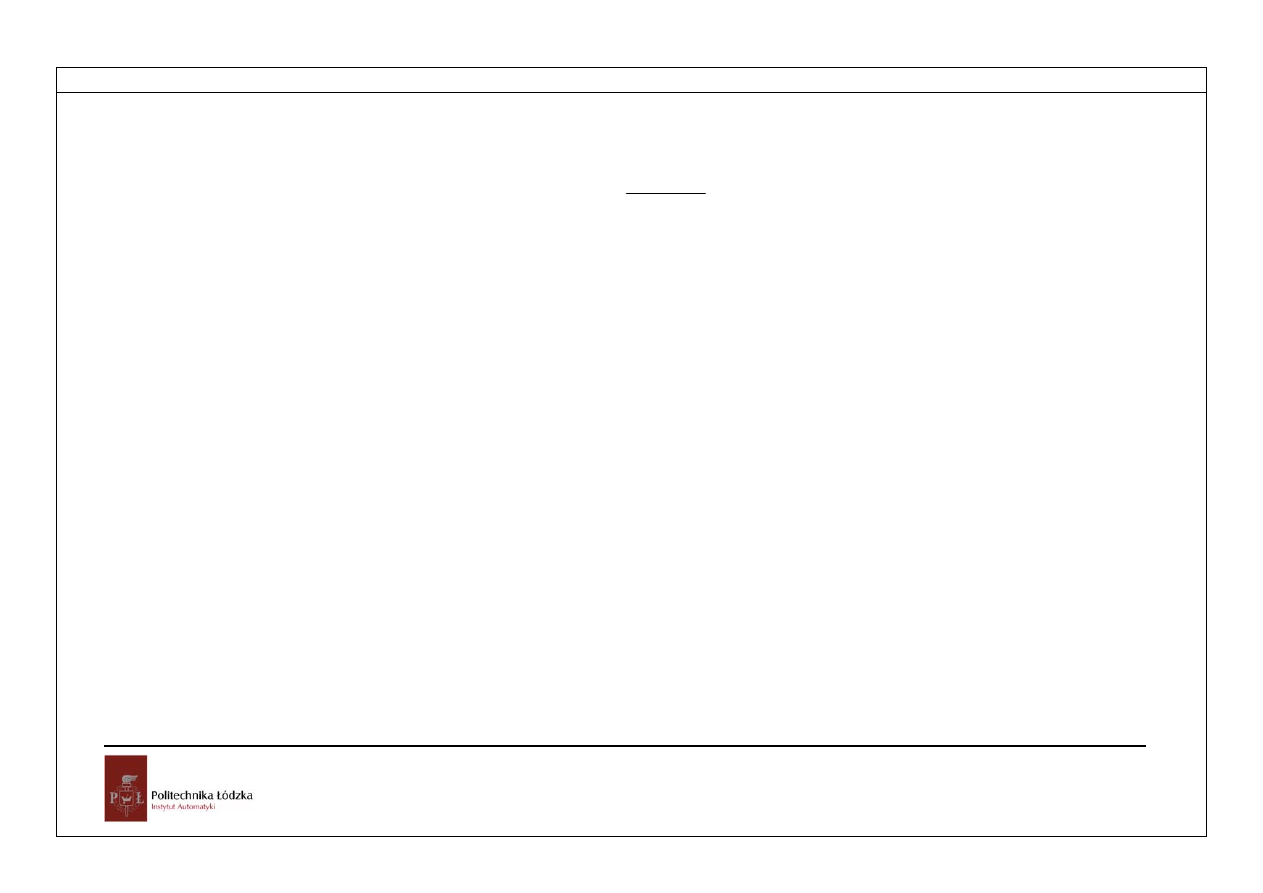
W układzie szeregowym regulatora wystarczy w celu zabezpieczenia się przed
przeciąganiem sygnału części całkującej zastosować ograniczenie pokazane na rysunku
7.5
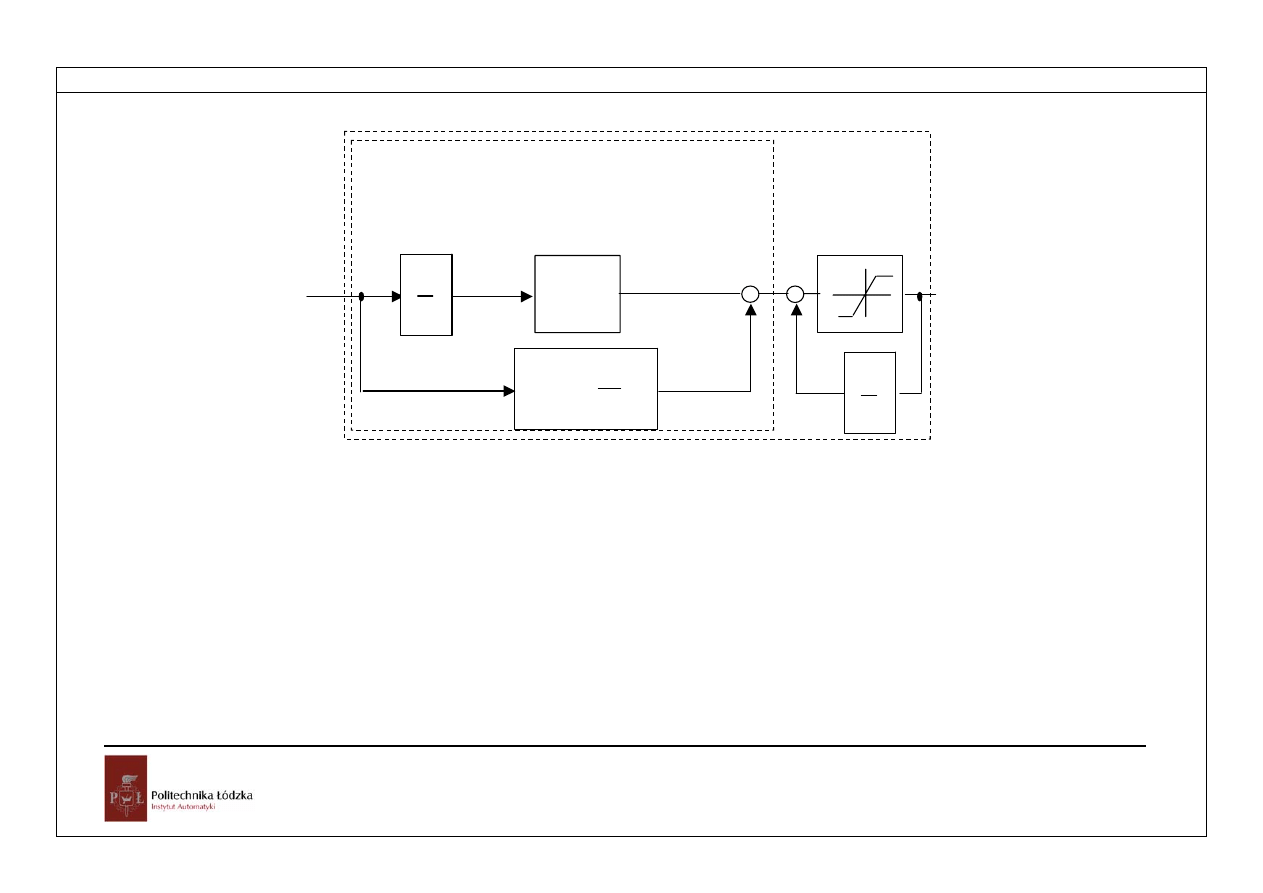
Rozdział 7
P
K
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
I
s
P
T
T
K 1
ε(n)
z
-1
E(z)
u(n)
z
1
z
1
Algorytm
prędkościowy
Algorytm
pozycyjny
14
Dyskretne Układy Regulacji
Rys.7.5. Struktura szeregowa PI z ograniczeniem sygnału części całkującej
Literatura
Literatura
[1] Ackerman J.: Regulacja impulsowa. WNT, Warszawa 1976
[2] Brzózka J.: Regulatory cyfrowe w automatyce. Mikom, Warszawa2002
[3] Brzózka J.: Regulatory i układy automatyki. Mikom, Warszawa2004
[4] Dębowski A.: Automatyka. Podstawy teorii. WNT, Warszawa 2008
[5] Gessing R.: Teoria sterowania. Część I. Układy liniowe. Skrypt uczelniany ' Politechniki Śląskiej nr 1302,
Gliwice 1987.
[6] Kaczorek T.: Teoria sterowania. T.1. PWN, Warszawa 1977
[7] Kaczorek T.: Teoria układów regulacji automatycznej. WNT, Warszawa 1977
[8] Laboratorium Teorii Sterowania i Podstaw Automatyki, Błachuta M. [red.]: (praca zbiorowa), Wydawnictwo
Politechniki Śląskiej nr 2082
[9] Markowski A., Kostro J., Lewandowski A.: Automatyka w pytaniach i odpowiedziach. WNT, Warszawa 1979
[10] Markowski J.: Elementy urządzenia i układy automatyki. WSiP, Warszawa 2006
[11] Mutambara A.: Design and Analysis of Control Systems. CRC Press, New York, 1999
[12] Niederliński A.: Systemy i sterowanie. Wyd. Politechniki Śląskiej, skrypt Nr 746, Gliwice 1978
[13] Ogata K.: Discrete – time control systems. Prentice Hall Inter., Englewood Cliffs 1987
[14] PN-88 M-42000 Automatyka i pomiary przemysłowe. Terminologia
[15] Rumatowski K.: podstawy automatyki. Część 2. Układy dyskretne i stochastyczne. Wydawnictwo Politechniki
Poznańskiej, Poznań 2005
[16] Schönfeld R.: Digitale Regelung elektrischer Abtriebe. VEB Verlag, Berlin 1987
[17] Schönfeld R.: Grundlagen der automatischen Steuerung. VEB Verlag, Berlin 1984
[18] Sinha N.K.: Controls systems. John Wiley &Sons, New York 1995
15
Dyskretne Układy Regulacji
[19] Takahashi Y., Rabins M., Auslander D.: Sterowanie i systemy dynamiczne. WNT, Warszawa 1976
Literatura
[20] Tewari A.: Modern Control Design with Matlab and Simulink. John Wiley & Sons Ltd, New York 2002
[21] Wajs K.: Linie pierwiastkowe w automatyce. WNT, Warszawa 1973
[22] http://pl.wikipedia.org/wiki/SCADA
[23] http://pl.wikipedia.org/wiki/System_czasu_rzeczywistego
16
Dyskretne Układy Regulacji
Document Outline
Wyszukiwarka
Podobne podstrony:
4 Dyskretne uklady regulacji, Nieznany (2)
2 Dyskretne uklady regulacji, Nieznany
3 Dyskretne uklady regulacji, Nieznany (2)
4 Dyskretne uklady regulacji, Nieznany (2)
6 Dyskretne układy regulacji, rozdział 9 Jakość dyskretnych układów regulacji
1 Dyskretne układy regulacji, rozdział 1 i 2, Wstęp Dyskretny układ regulacji
4 Dyskretne układy regulacji, rozdział 6 Podstawowe struktury układów regulacji
5 Dyskretne układy regulacji, rozdział 7 Struktury regulatorów dyskretnych
2 Dyskretne układy regulacji, rozdział 3 i 4 Funkcje dyskretne Równania różnicowe
3 Dyskretne układy regulacji, rozdział 5 Stabilność układów dyskretnych
matematyka dyskretna w 2 id 283 Nieznany
8 zasilanie odbiorcow uklady si Nieznany (2)
5 4 Charakterystyki regulacyjne Nieznany (2)
zmienne losowe dyskretne id 591 Nieznany
Matematyka dyskretna id 283281 Nieznany
Matematyka dyskretna prawd id 7 Nieznany
4 RegulaminOrganizacyjnyCZSWlis Nieznany (2)
14 elementy i uklady elektronic Nieznany
88 Nw 02 Proste uklady elektron Nieznany
więcej podobnych podstron