5. REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKÓW
TRAKCYJNYCH
Podstawowa wiedza na temat silników prądu stałego
S
S
I
I
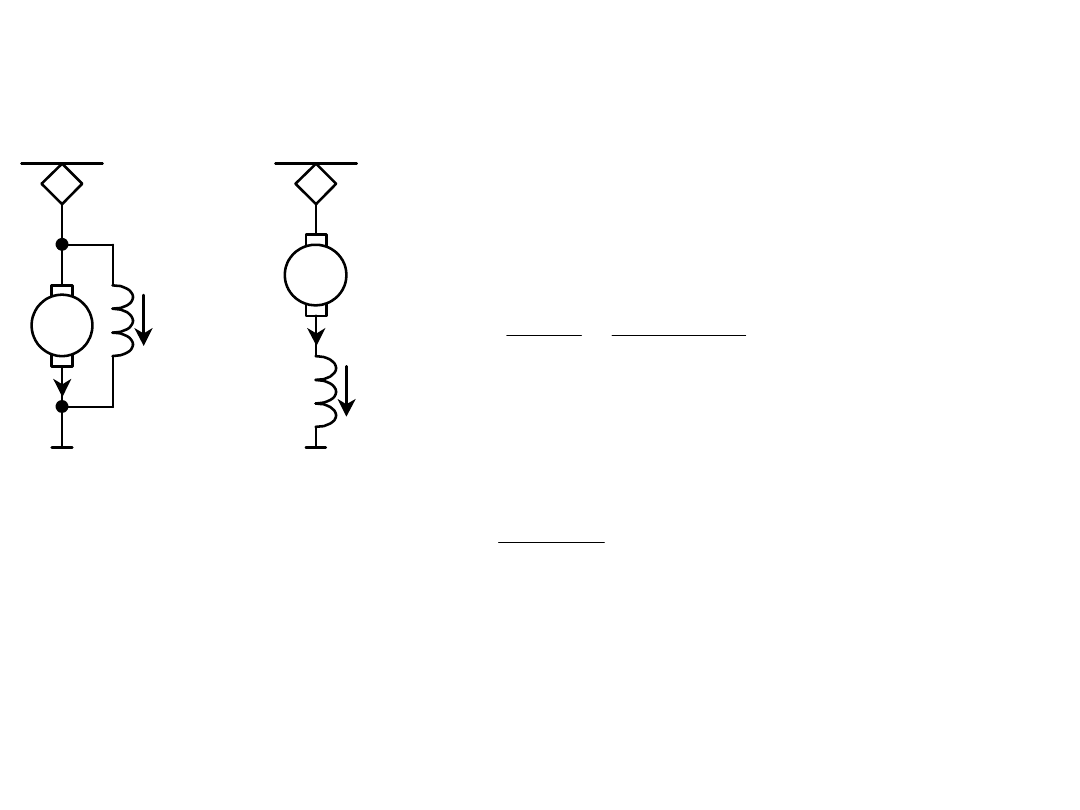
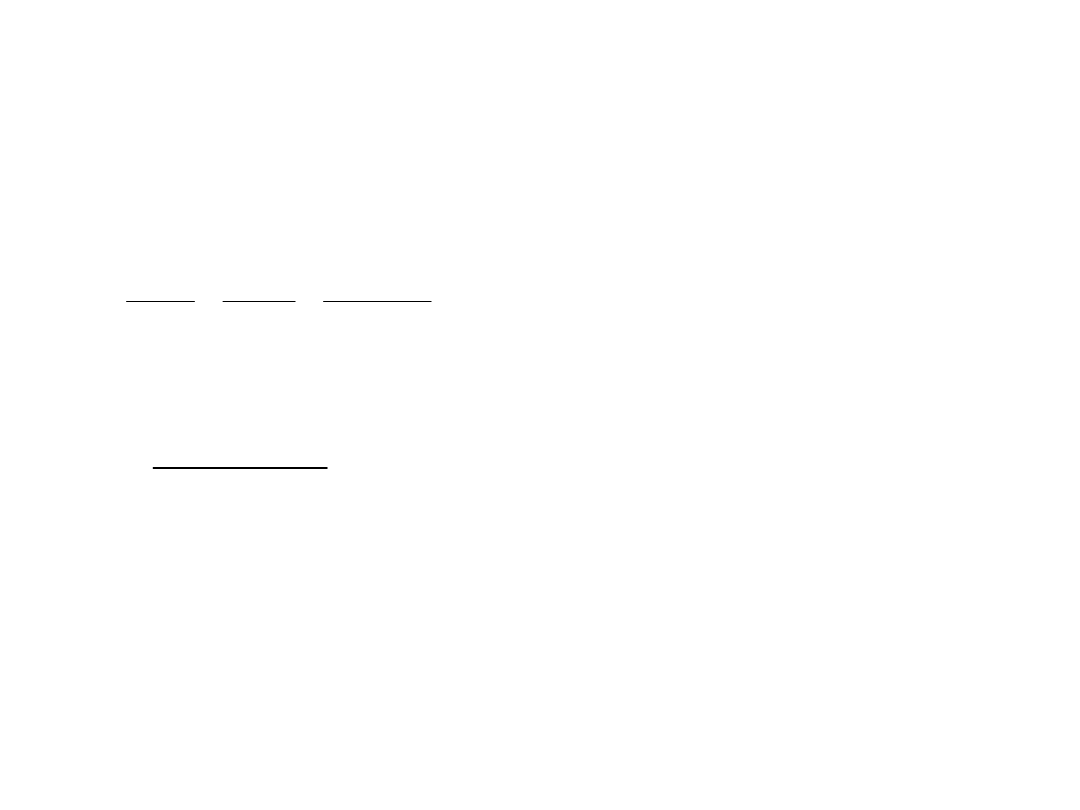
Bocznikowy i
szeregowy silnik
prądu stałego
Gdy maszyna pracuje jako silnik, po
przyłożeniu napięcia U do jej zacisków,
przez twornik płynie prąd I
R
n
c
U
R
E
U
I
gdzie R – całkowita oporność obwodu
twornika. Stąd prędkość obrotowa
silnika wyraża się zależnością:
c
R
I
U
n
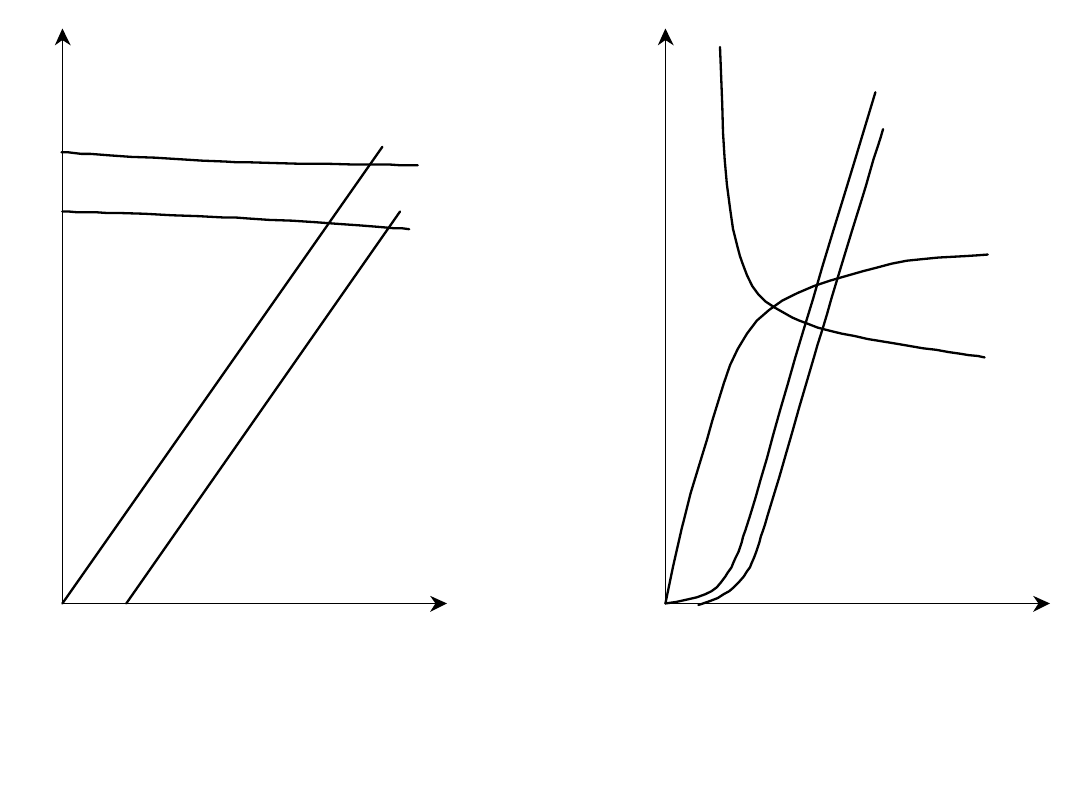
Moment M na wale silnika
I
c
M
1
M F
n V
c
M (F)
M
e
(F
e
)
c
n (V)
I
M F
n V
I
n (V)
M
e
(F
e
)
M (F)
silnik bocznikowy
silnik szeregowy
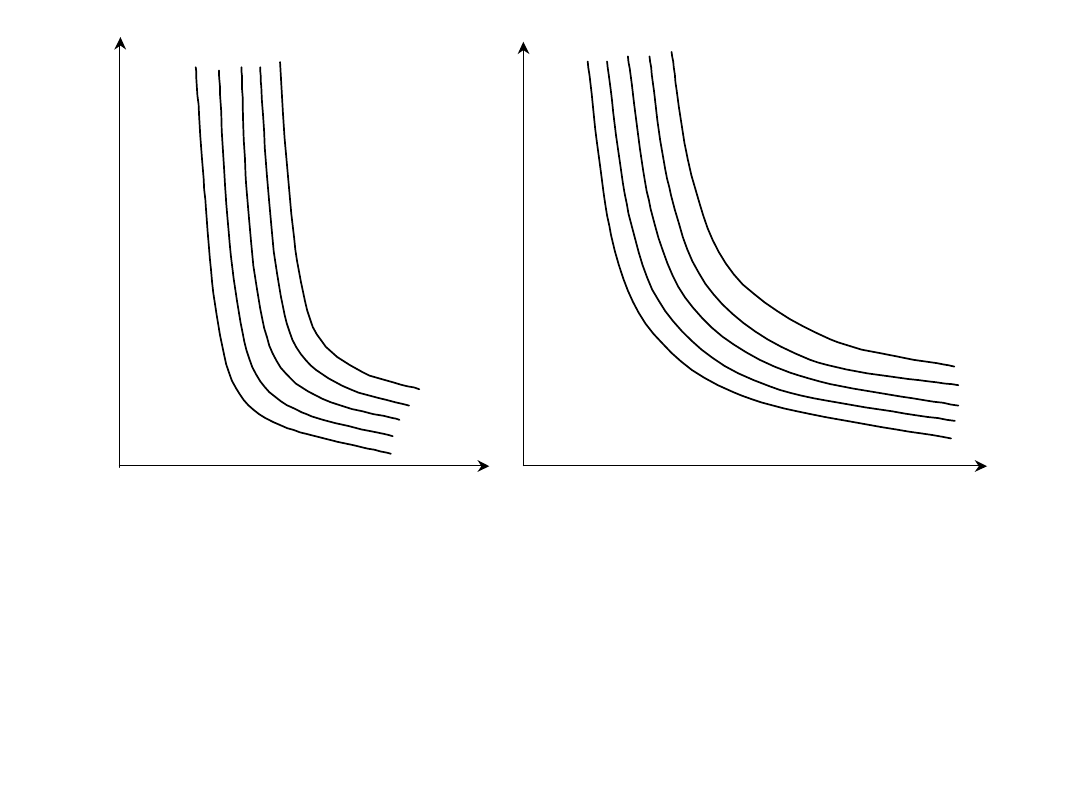
Charakterystyki (I), M(I), n(I) silników prądu
stałego
Moc P
2
na wale silnika to moc P
1
doprowadzona do silnika
pomniejszona przez jego sprawność η. Z drugiej strony moc P
2
stanowi iloczyn momentu M na wale silnika i jego prędkości
kątowej. Równanie stanu silnika, porównujące obie moce, ma
postać:
Na podstawie prędkości obrotowej n silnika można w
następujący sposób określić prędkość v lokomotywy (pociągu):
]
/
[
1
2
2
1
2
s
m
z
n
D
z
n
D
z
D
v
gdzie: D [m]– średnica koła napędnego,
z – przełożenie przekładni,
n [1/s] – prędkość obrotowa silnika.
lub gdy n[1/min]
]
/
[
305
,
5
6
,
3
60
h
km
z
n
D
z
n
D
v
n
M
I
U
2

Równanie przejścia od momentu na wale silnika do siły
pociągowej F lokomotywy ma postać:
D
z
m
M
F
z
2
gdzie: F [N] – siła pociągowa,
M [Nm] – moment na wale silnika,
z – przełożenie przekładni,
η
z
- sprawność przekładni,
m – liczba silników w lokomotywie.
Moc elektryczna lokomotywy liczona na obwodzie jej kół
napędnych wynosi:
z
z
I
U
m
P
m
N
2
Moc mechaniczna jest iloczynem siły pociągowej i prędkości
pociągu.
6
,
3
v
F
N
gdzie: F[N], v[km/h]
Łącząc oba równania uzyskuje się równanie stanu
lokomotywy:
z
I
U
m
v
F
6
,
3
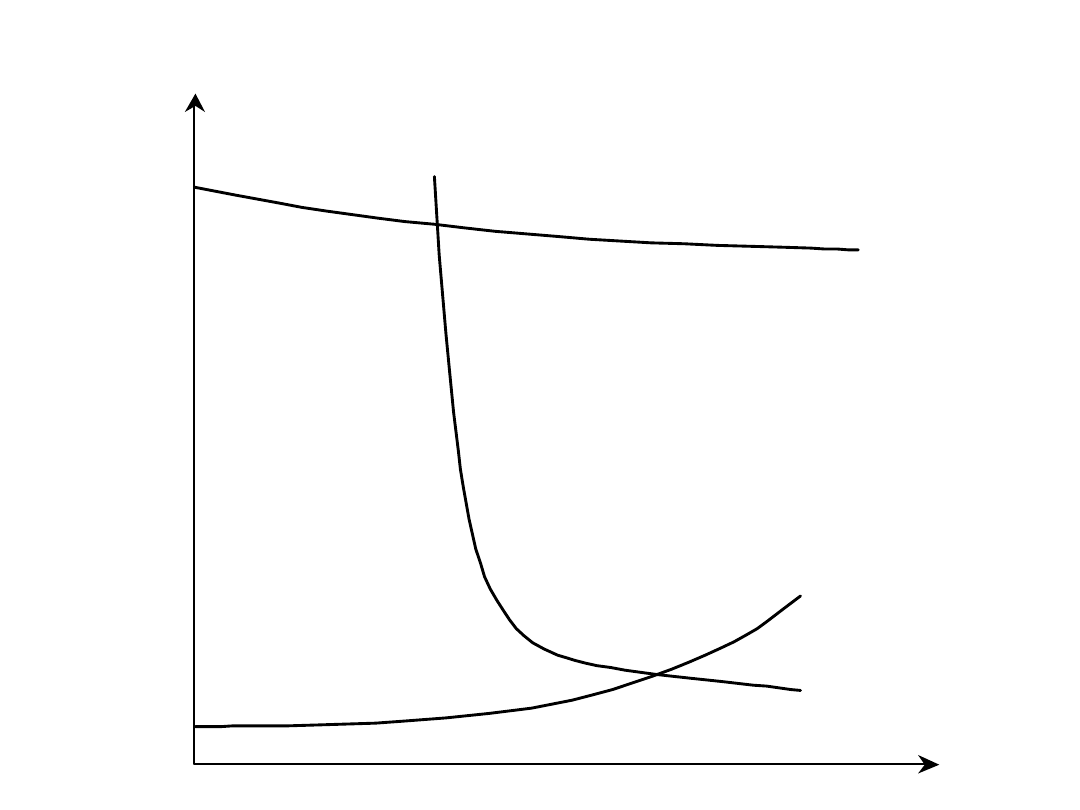
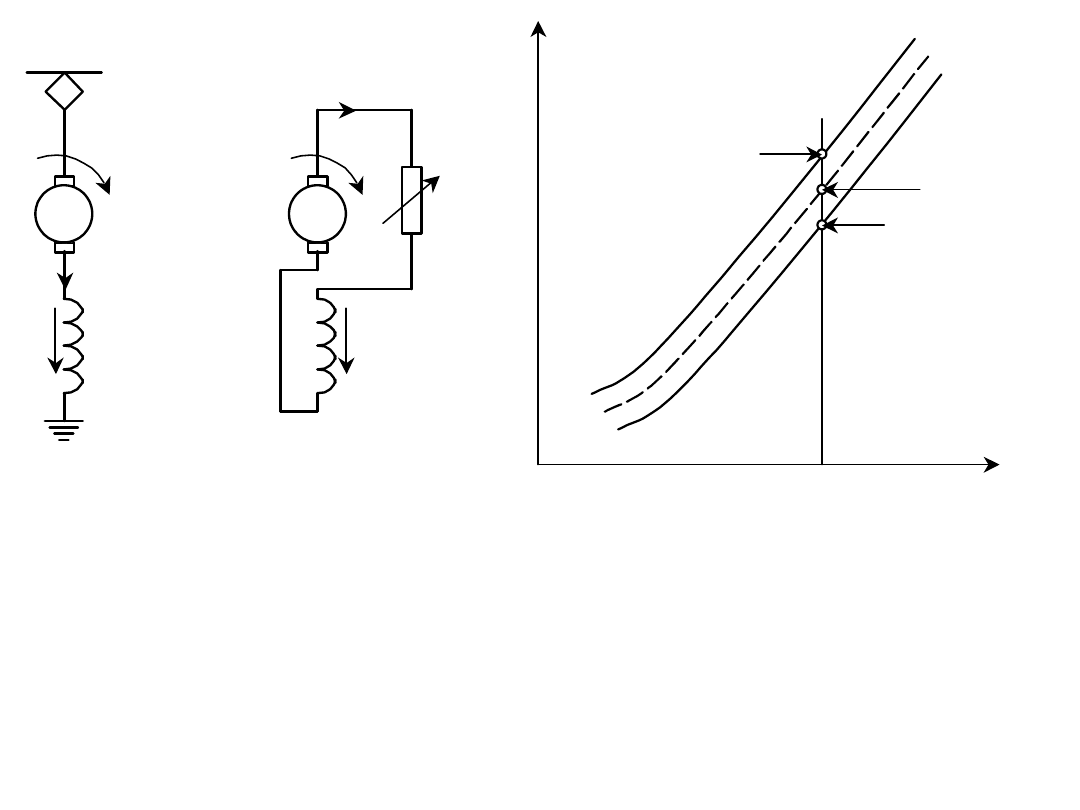
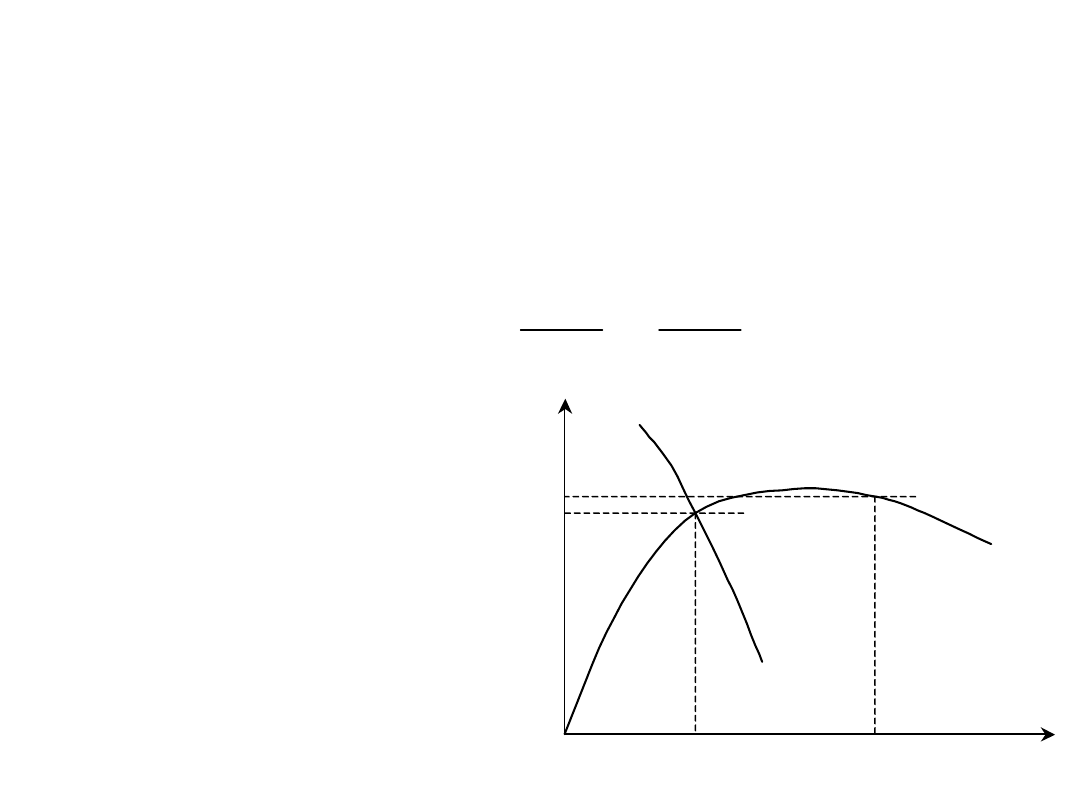
Charakterystyka trakcyjna
F
F
F
L
W
v
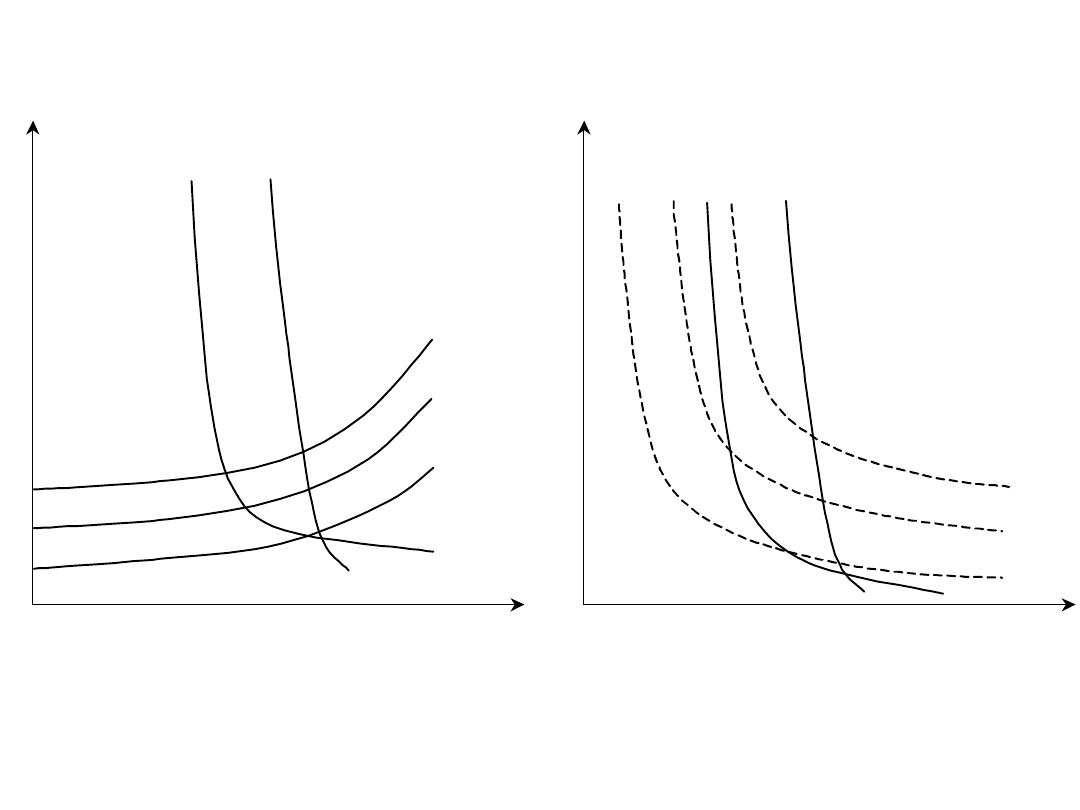
F
s
W
v
b
F
s
I = const.
v
b
a)
b)
Charakterystyki trakcyjne lokomotywy z silnikami
szeregowymi (s)
i bocznikowymi (b) na tle a) oporów ruchu, b) krzywych
izoprądowych
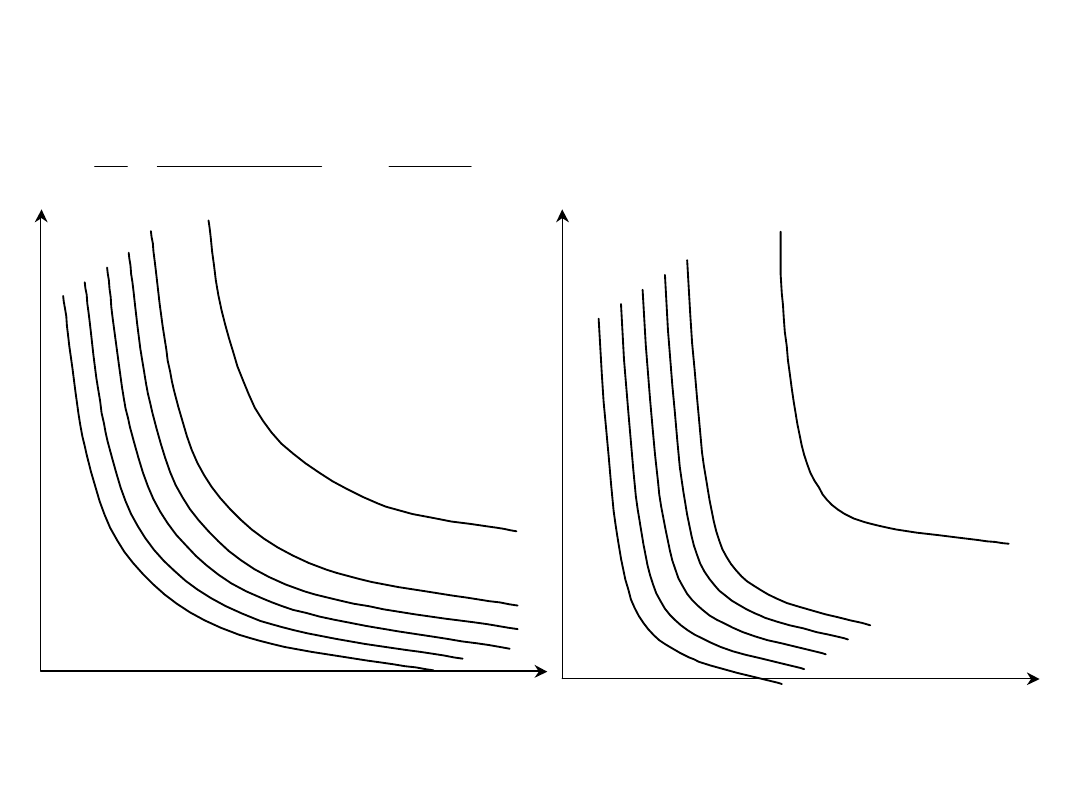
Regulacja prędkości obrotowej szeregowych silników
trakcyjnych prądu stałego
c
R
I
U
n
Z zależności n=f(I) wynika, że w celu regulacji
prędkości
zmieniać
można
napięcie
U
przyłożone do silnika oraz strumień Φ uzwojeń
wzbudzenia silnika. Pozostałe parametry są
stałe.
Obniżenie napięcia na silniku prowadzi do obniżenia prędkości
pociągu, obniżenie strumienia – do wzrostu prędkości.
Napięcie na zaciskach silnika, przy stałym napięciu sieci, można
zmieniać przez:
- szeregowe łączenie silników,
- włączanie oporu w szereg z silnikiem.
Strumień w uzwojeniu wzbudzenia można zmniejszać przez
zbocznikowanie oporem tego uzwojenia.
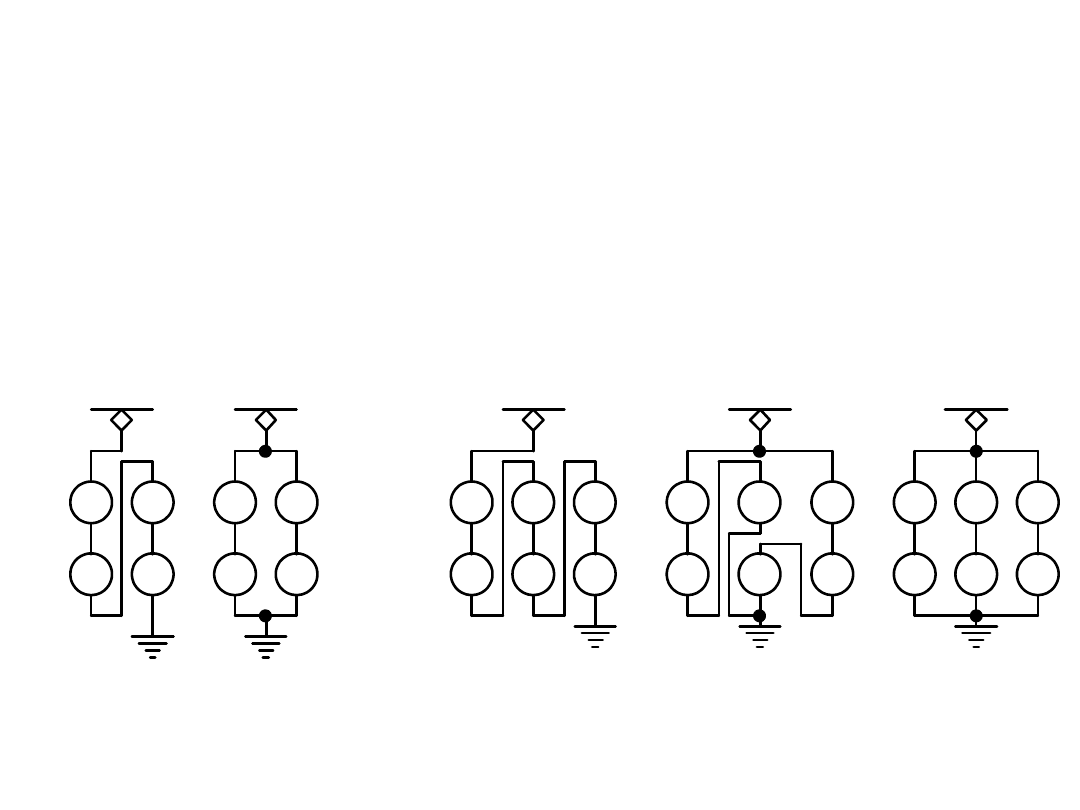
Obniżanie napięcia na zaciskach silnika
Liczba silników w lokomotywach i pojazdach trakcyjnych jest
parzysta, ich napięcie znamionowe wynosi 1500 V. Przy napięciu
sieci trakcyjnej Us=3000 V, przez zmianę połączenia silników
można na nich uzyskać następujące napięcia:
• dla lokomotywy 4-silnikowej B
0
B
0
: U=1/4U
s
oraz U=1/2U
s
,
• dla lokomotywy 6-silnikowej C
0
C
0
: U=1/6U
s
, U=1/3U
s
oraz
U=1/2U
s
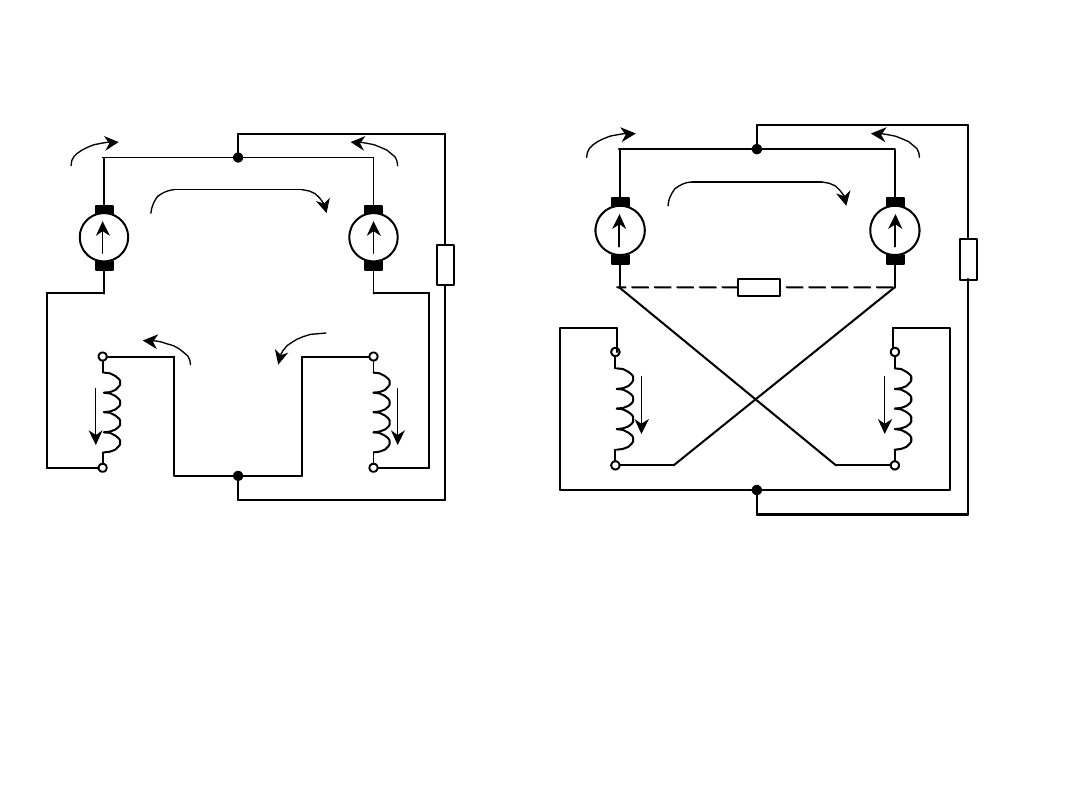
a)
b)
Połączenia silników w lokomotywie a) B
0
B
0
, b)
C
0
C
0
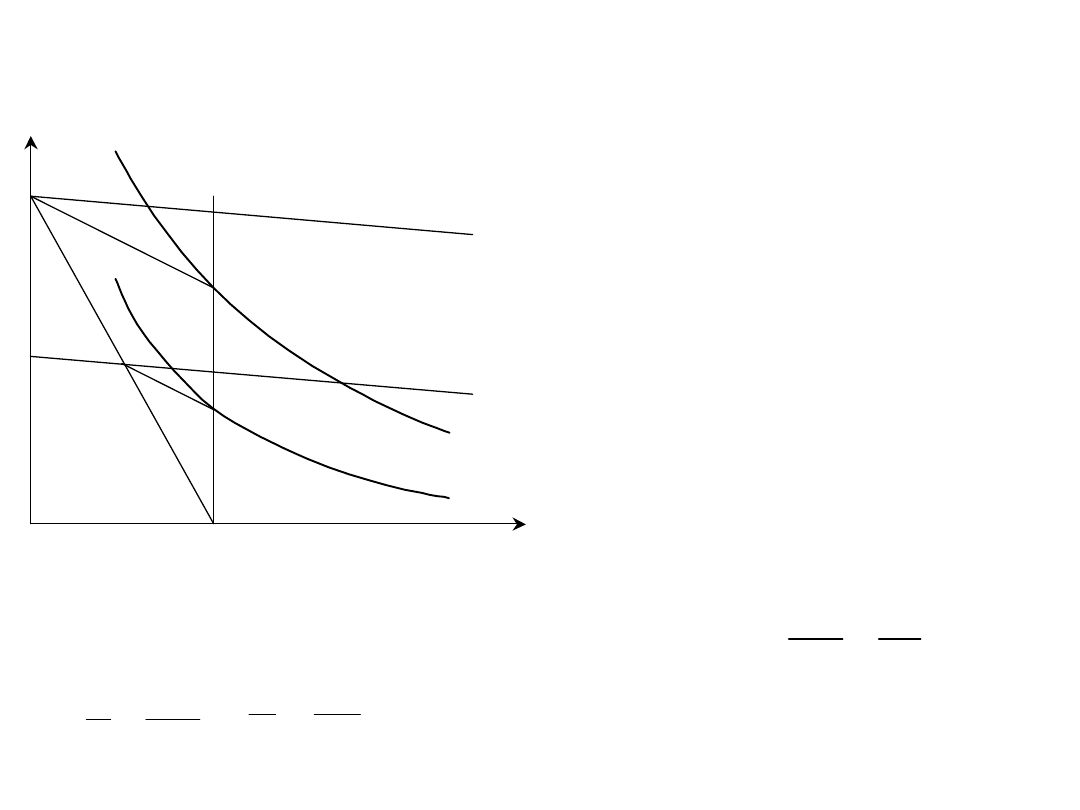
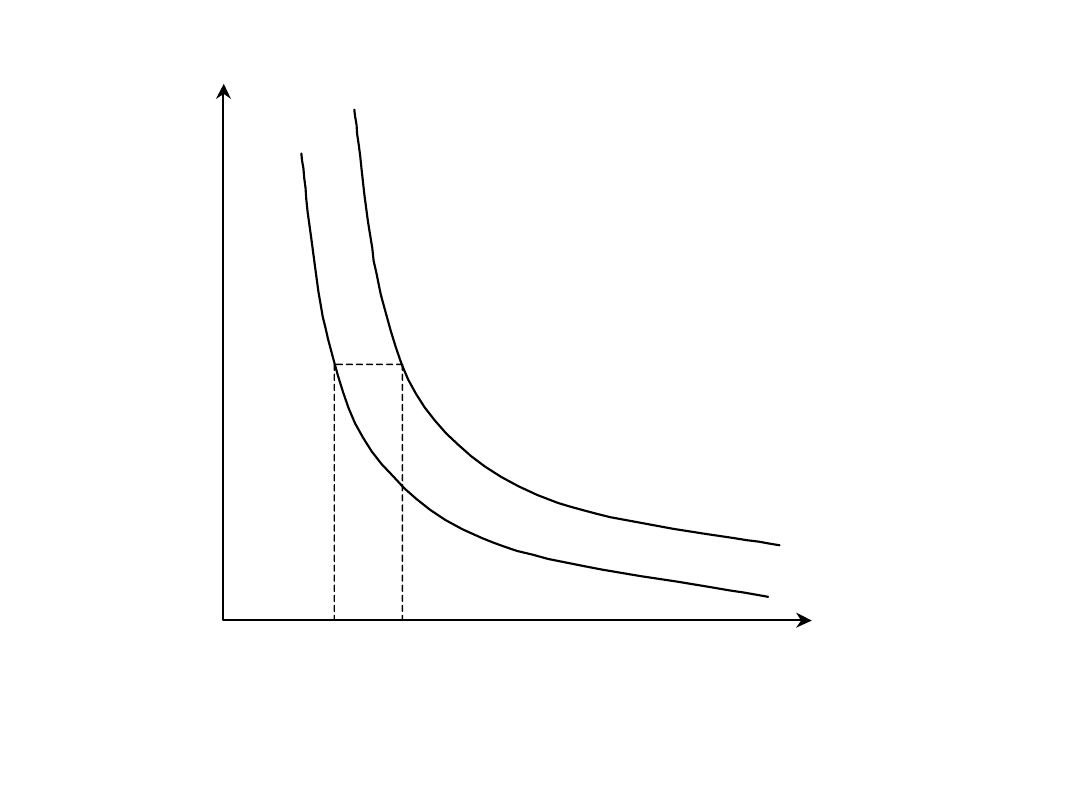
Obniżenie napięcia na silniku powoduje przesunięcie w dół
charakterystyki v=f(I). Dysponując charakterystyką v(I) przy
pełnym napięciu U można znaleźć charakterystykę v’(I) przy
obniżonym napięciu U’, porównując prędkości przy tej samej
wartości prądu I.
c
R
I
U
v
c
R
I
U
v
'
'
R
I
U
R
I
U
n
n
v
v
'
'
'
R
I
U
R
I
U
v
v
'
'
Dla dokładnych obliczeń należy znać wartość rezystancji
silnika R. W przybliżeniu, dla U’=1/2U v’=1/2v, ponieważ
wartość iloczynu IR jest niewielka w stosunku do napięcia
silnika. Dokładnie, im większe są wartości prądu, punkty v’
na charakterystyce v’(I) leżą niżej niż 1/2v.
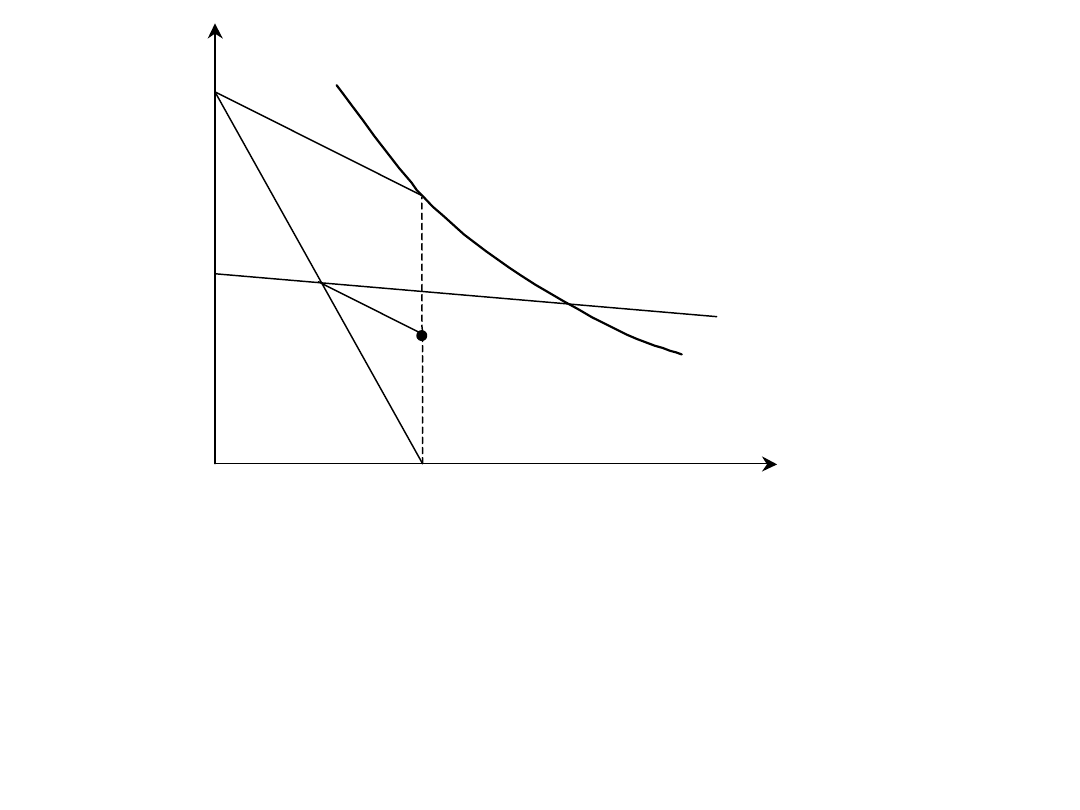
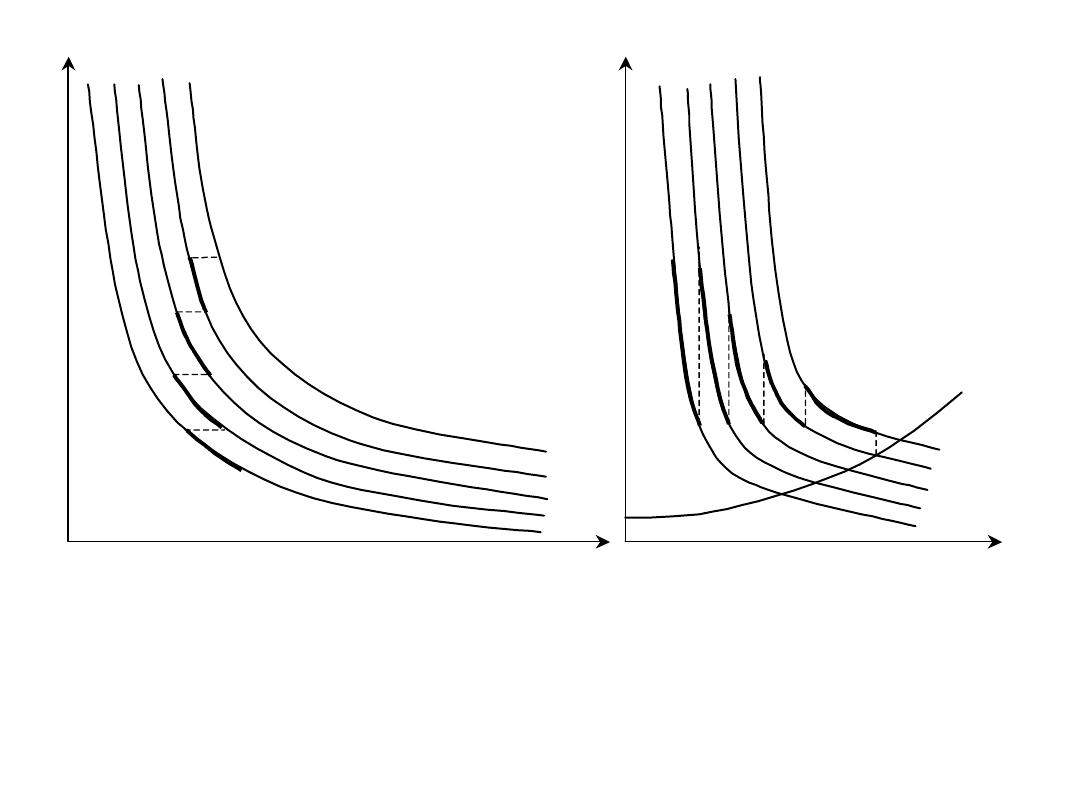
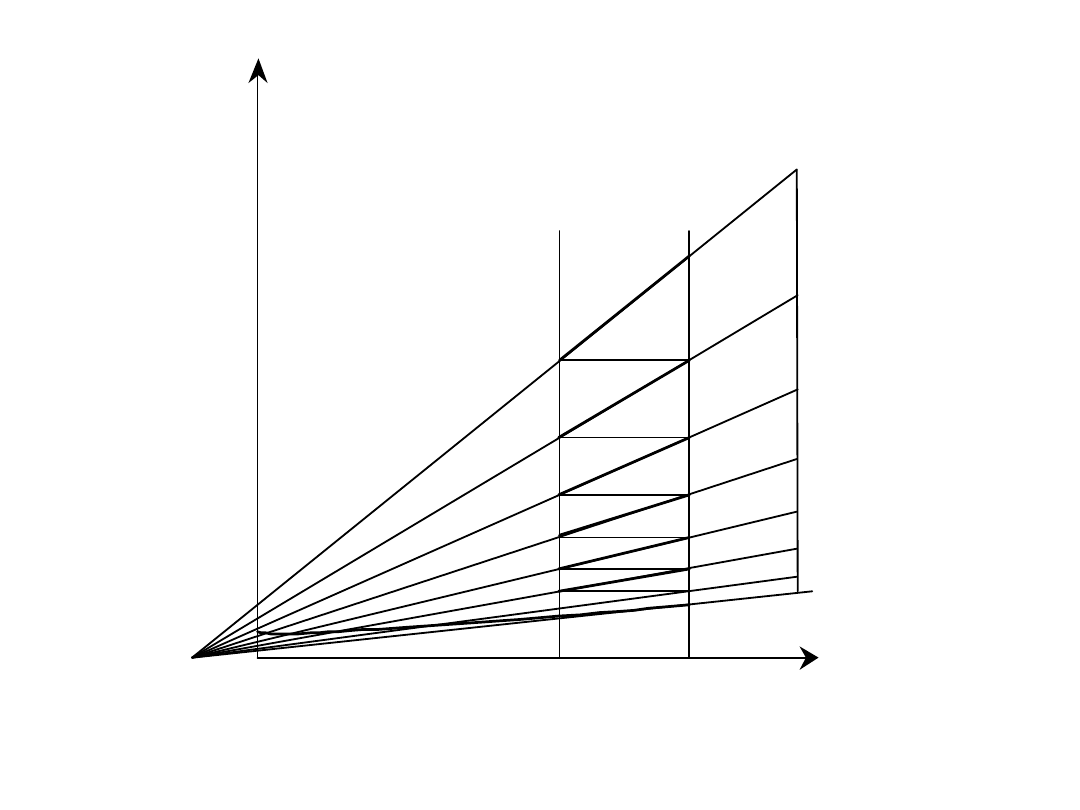
Podstawa metody graficznej wyznaczania krzywej v’(I) przy
obniżonym napięciu U’ na podstawie krzywej v(I) przy napięciu U.
V
A
E’
I
V
V’
U
U’
E
I
•
Mamy dwie krzywe: v(I) dla
U oraz v’(I) dla U’.
•
Na osi v odkładamy w
dowolnej skali U oraz U’.
•
Znając oporność silnika R
prowadzimy proste E=U-IR
oraz E’=U’-IR.
•
Prowadzimy dowolną
pionową I, na której
zaznaczamy punkty E i E’
oraz v i v’.
•
Łączymy prostą punkty U
oraz I, wyznaczając punkt A.
•
Łączymy punkty U i v oraz A
i v’.
Na podstawie trójkątów UEI oraz AE’I można napisać:
UI
AI
EI
I
E
'
EI
I
E
v
v
'
'
UI
AI
v
v
'
stąd wniosek, że proste Uv oraz Av’ są
równoległe.
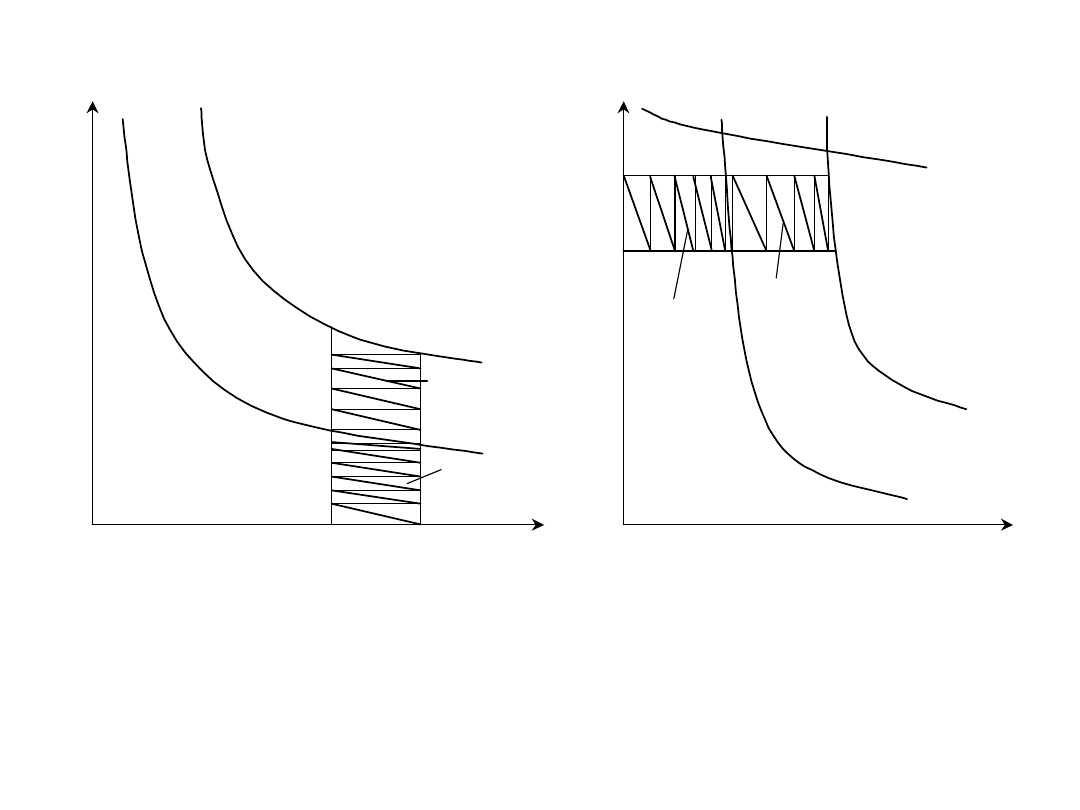
V
A
K
E’
I
V
K
V
K
’
U
U’
E’ = f(I)
I
K
Kolejność czynności jest następująca:
1. Dla wartości prądu I
k
rysujemy prostą pionową.
2. Na osi v odkładamy w dowolnej skali U oraz U’.
3. Rysujemy prostą U’-IR.
4. Łączymy punkt U z v
k
oraz I
k
.
5. Na przecięciu prostych E’ oraz UI
k
otrzymujemy punkt A
k
.
6. Przez punkt A
k
rysujemy prostą równoległą do Uv
k
,
uzyskując v’
k
.
Tak postępujemy dla kolejnych wartości I
k
.
Sprawność
silnika
I
U
P
I
U
P
P
I
U
u
i
1
Przy napięciu U F v = 3,6 m U
I η η
z
przy napięciu U’ F v’ = 3,6 m U’
I η’ η
z
'
'
'
U
U
v
v
'
'
'
U
U
v
v
'
'
'
U
U
R
I
U
R
I
U
U
R
I
U
R
I
1
'
1
'
I
1500 V
750 V
Sprawność silnika szeregowego w
funkcji prądu
V
B
0
B
0
I
F
B
0
B
0
V
V
C
0
C
0
I
F
C
0
C
0
V
a)
b)
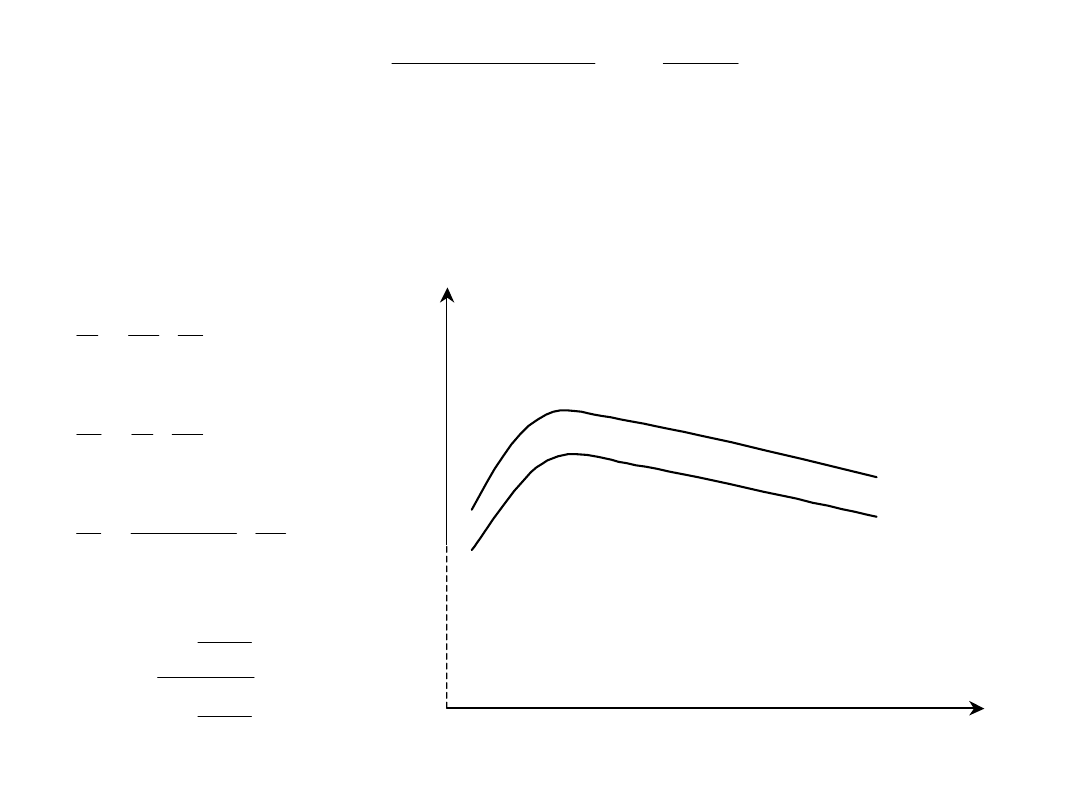
Charakterystyki v(I) i F(v) dla
lokomotywy
a) 4 – silnikowej B
0
B
0
, b) 6 – silnikowej
C
0
C
0
Włączenie dodatkowego oporu R
r
zmieni napięcie przyłożone do
silnika na U-IR
r
. Nowa charakterystyka v
R
(I) będzie wynikała z
zależności:
IR
U
IR
IR
U
R
R
I
U
v
v
r
r
R
1
V
V(I)
I
F
F(V)
V
R
r0
= 0
R
r4
R
r3
R
r2
R
r1
R
r4
> R
r3
> R
r2
> R
r1
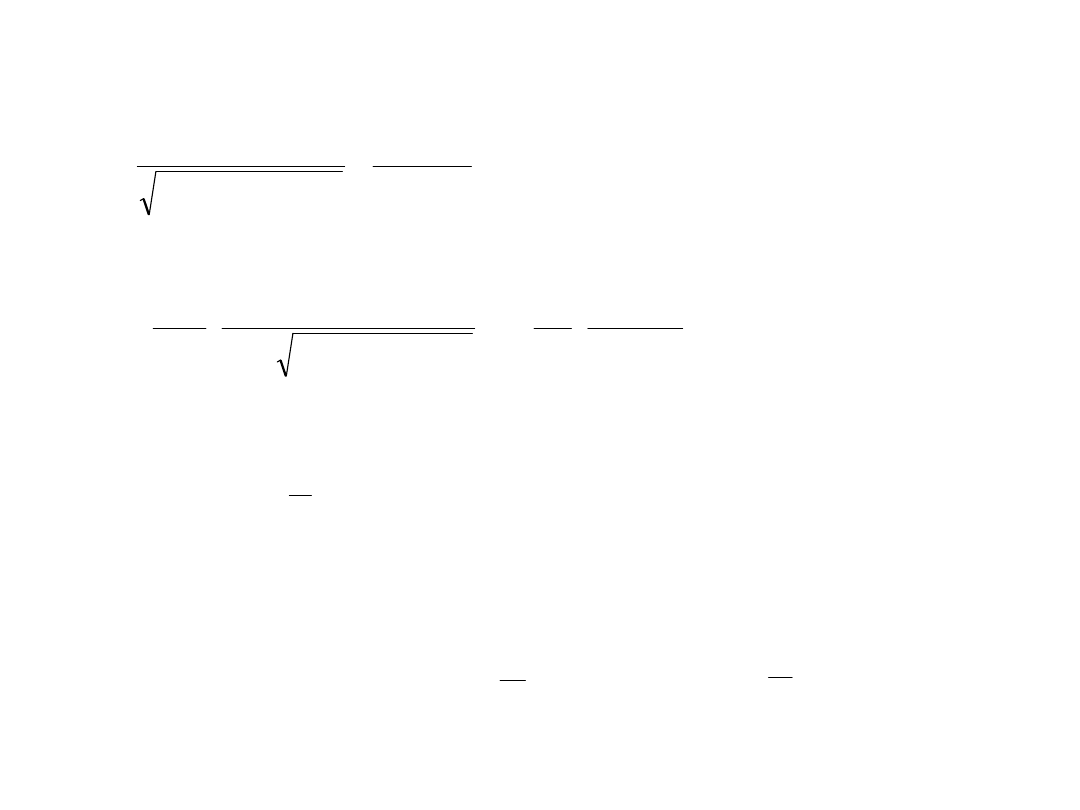
V’(I)
F’(V)
R
r0
= 0
R
r1
R
r2
R
r3
R
r4
Charakterystyki v(I) i F(v) przy różnych wartościach oporów
rozruchowych R
r
Zmniejszanie strumienia magnetycznego
silników
Wartość strumienia magnetycznego wytwarzanego przez
uzwojenie biegunów głównych silnika równa jest stosunkowi
przepływu
(amperozwojów)
do
oporności
obwodu
magnetycznego:
R
z
I
Zmniejszenie strumienia w silniku szeregowym, zwane
osłabieniem wzbudzenia lub osłabieniem pola, wymaga
zmniejszenia przepływu Iz. Można tego dokonać dwoma
sposobami:
• przez zwieranie części uzwojenia wzbudzenia,
• przez bocznikowanie uzwojenia wzbudzenia.
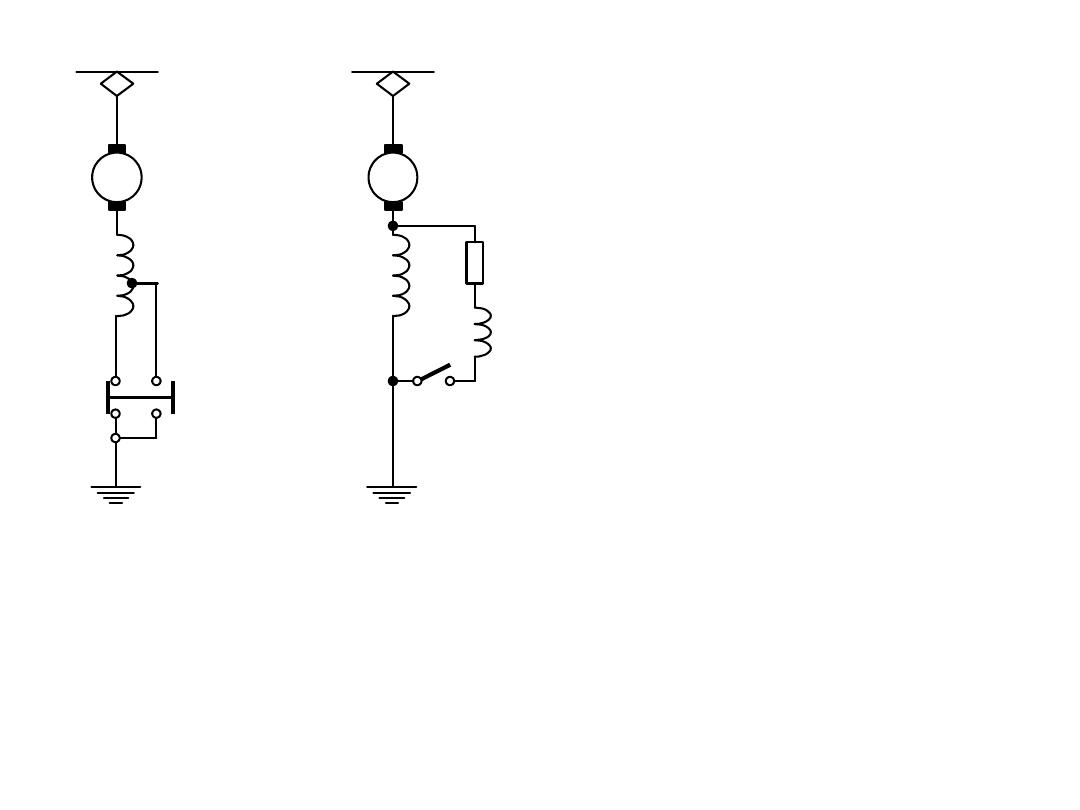
R
b
L
b
a)
b)
Bocznikowanie silników
szeregowych
a) przez zwieranie części
uzwojeń wzbudzenia
b) przez włączenie
dodatkowego obwodu
Zdecydowanie łatwiejsza technologicznie i korzystniejsza jest
druga metoda (b) i ona znalazła zastosowanie w praktyce.
Do określenia głębokości osłabienia pola silnika stosuje się
pojęcie stopnia wzbudzenia w. Jest to stosunek przepływu
(amperozwojów) biegunów głównych przy osłabionym polu do
pola pełnego.
Iz
Iz
w
Bywa czasem stosowany termin „stopień bocznikowania”,
który określa, w jakim stosunku pełny przepływ został
osłabiony.
Iz
Iz
Iz
b
Między tymi pojęciami istnieje
związek:
1
b
w
Przy osłabieniu pola przez bocznikowanie uzwojenia
wzbudzenia, stopień wzbudzenia jest stosunkiem wartości
prądu magneśnicy przy osłabionym polu do prądu magneśnicy
przy pełnym polu:
I
I
w
Jak zmieniają się straty w magneśnicy ΔP
m
=I
2
R
m
przy
osłabieniu pola
m
b
m
m
m
b
m
m
m
R
R
I
I
I
R
I
R
I
R
I
R
I
I
R
I
P
P
2
2
2
2
2
2
I
R
I
I
R
m
b
w
w
w
w
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
P
P
m
m
1
2
2
2
2
Zmniejszone straty rozkładają się na uzwojenie wzbudzenia i
bocznikującą rezystancję R
b
. Ilość ciepła wydzielanego w
samych uzwojeniach wzbudzenia zmniejszają się w większym
stopniu, bo w
2
. Straty w boczniku dokładają składnik w-w
2
.
W praktyce silnik trakcyjny wyposaża się w kilka boczników,
przez co uzyskuje się możliwość regulacji osłabienia pola.. Za
dolną granicę osłabienia wzbudzenia uważa się 30% (w=0,3), a
przy zastosowaniu uzwojenia kompensacyjnego 20% (w=0,2).
Wpływ osłabienia pola na prędkość obrotową silnika
Porównana zostanie prędkość obrotowa silnika przy pełnym
polu z prędkością przy wzbudzeniu w, lecz przy założeniu tego
samego strumienia biegunów głównych.
Przy pełnym polu:
c
R
R
I
U
c
IR
U
n
m
t
Przy osłabionym polu przez twornik płynie prąd I/w , przez
uzwojenie wzbudzenia I, a strumień zmienia się pod wpływem
reakcji twornika.
c
w
R
R
I
U
c
IR
R
w
I
U
n
t
m
m
t
t
m
t
m
R
R
I
U
w
R
R
I
U
v
v
n
n
1
v
v
n
n
dla tego samego prądu magnesującego
n
V
w
I
I/w
w = 1
Charakterystyki n(I) i v(I) przy osłabieniu
pola w
V
V
K
’
I
y = x
B
K
A
K
V
K
y = wx
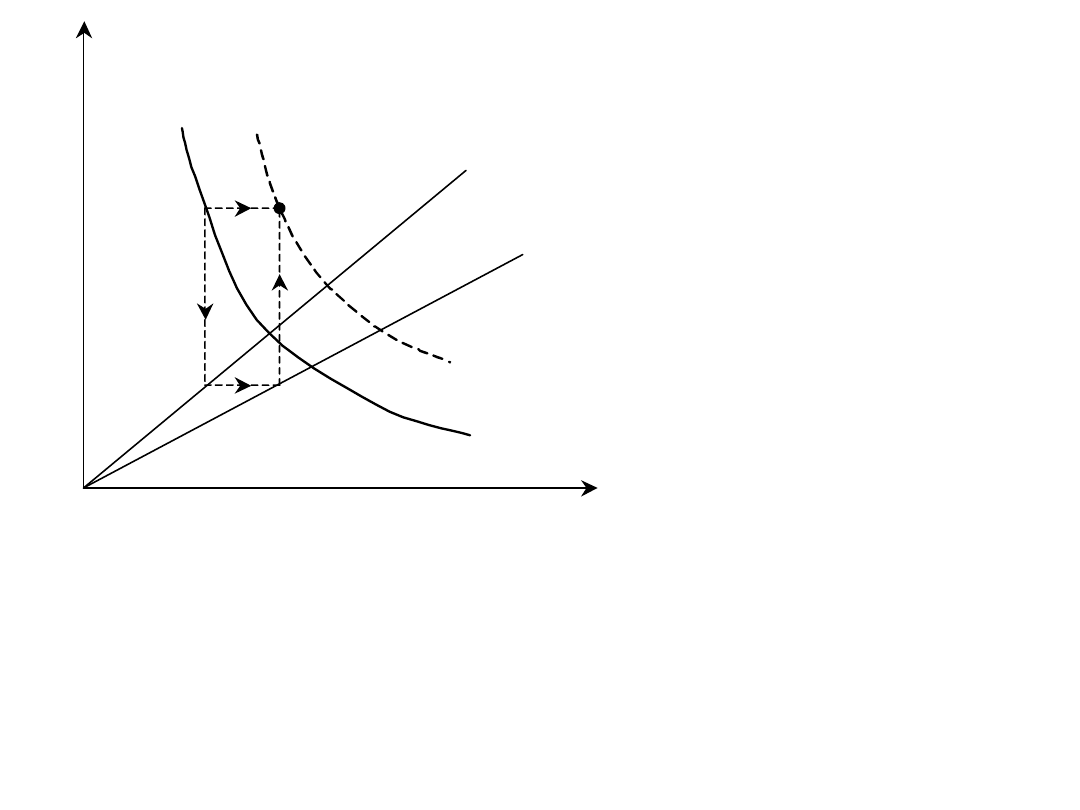
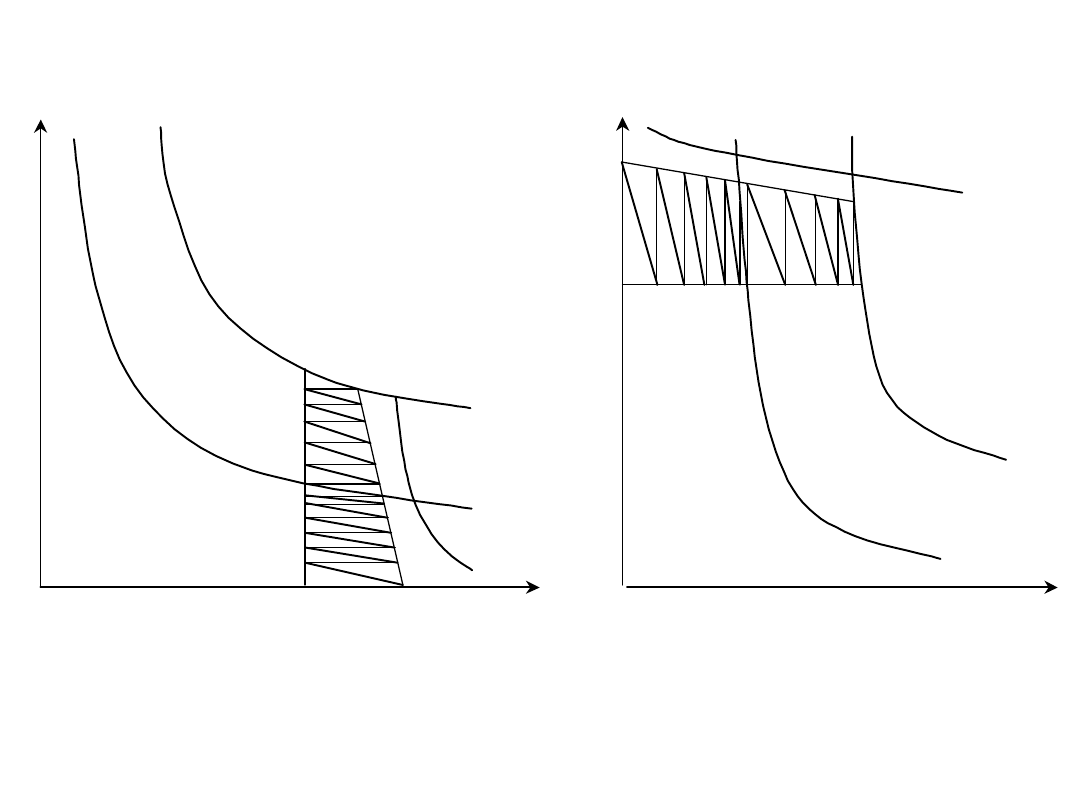
Metoda graficzna
wyznaczania
charakterystyki v(I)
przy osłabieniu pola w
Postępowanie jest następujące:
•
Przez początek układu współrzędnych prowadzimy 2 proste
pomocnicze y=x oraz y=wx.
•
Dowolny punkt vk na krzywej zasadniczej v(I) przenosimy,
wyznaczając punkty Ak, Bk oraz v’k na nowej charakterystyce
v’(I).
W ten sposób zachowana jest zależność v/v
’
=1, przy
niezmienionym prądzie w magneśnicy.

F
w = 1
V
F’ = F/w
w
F
dla w=1
Charakterystyka
trakcyjna F(v) przy
osłabieniu pola w
z
I
U
m
v
F
6
,
3
przy osłabionym polu
z
I
U
m
v
F
6
,
3
I
I
F
F
w
I
I
w
F
F
1
w
F
F
lub
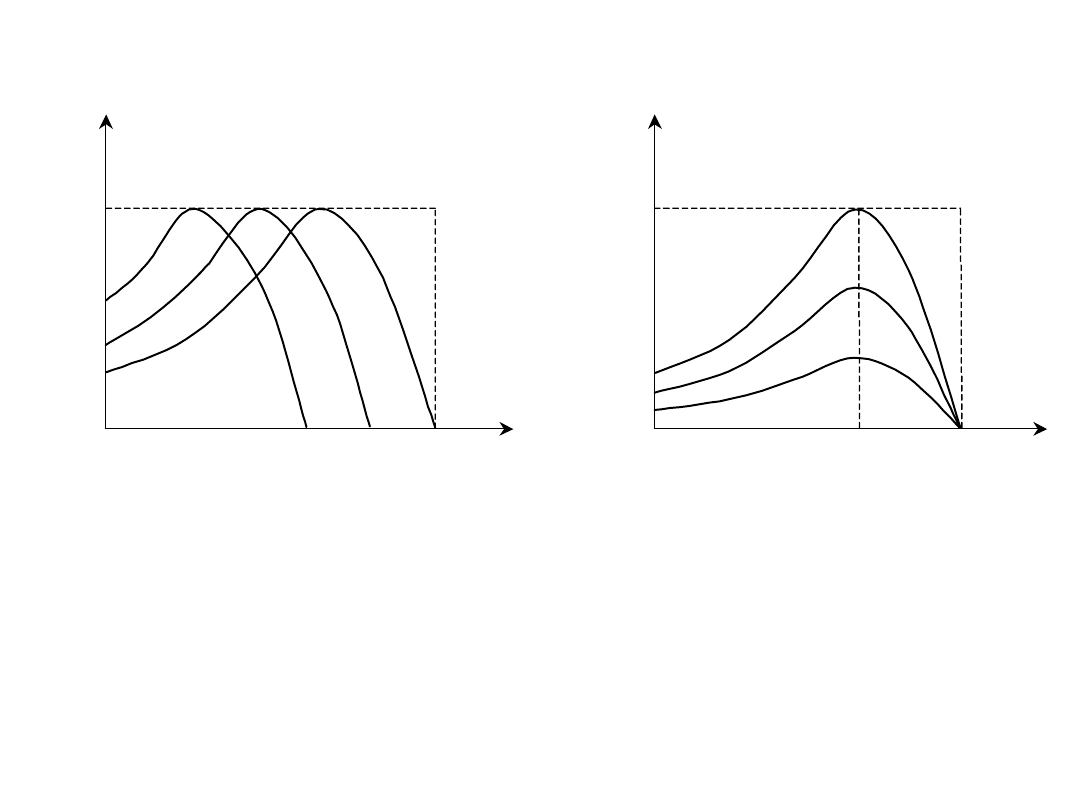
V
I
F
V
w = 1
w = 1
Pęk charakterystyk v(I) oraz F(v) dla różnych stopni
osłabienia pola
Przykładowo lokomotywa EU-07 ma 6 stopni osłabienia pola:
75,5%, 58,2%, 43,5%, 34,7%, 28% i 22%. Silnik typu EE 541
wyposażony jest w uzwojenie kompensacyjne.
V
I
F
V
W
Zmiany prądu I oraz siły pociągowej F przy regulacji
osłabienia pola silnika

Rozruch lokomotywy z silnikami prądu stałego
Dla silników szeregowych wartość prądu w czasie rozruchu nie
może być większa niż dwukrotna wartość prądu I
h
mocy
godzinnej.
Zwykle natężenie prądu rozruchu przyjmuje się niższe od
wartości granicznej 2I
h
. Zależy to od warunków wpływających na
nagrzewanie się silnika. Im przewidywane są częstsze rozruchy
pojazdu, tym niższy obiera się prąd rozruchu. Podobnie przy
długich czasach trwania rozruchów.
Praktycznie, wartość prądu rozruchowego mieści się zwykle w
następujących granicach:
lokomotywy pasażerskie w ruchu dalekobieżnym 1,6 ÷ 2,0 I
h
lokomotywy towarowe
1,3 ÷ 1,6 I
h
pociągi podmiejskie
1,3 ÷ 1,5 I
h
tramwaje
1,1 ÷ 1,3 I
h
V
V = f(I)
I
F
F = f(V)
V
F = f(V)
V’ = f(I)
V
R
= f(I)
V’
R
= f(I)
F
I
min
I
max
F
min
F
max
F = f(V’)
F = f(V’
R
)
F = f(V
R
)
Rozruch oporowy lokomotywy przy I
max
=
const
V
V = f(I)
I
F
F
L
= f(V)
V
F = f(V)
V’ = f(I)
F
F = f(V’)
Rozruch oporowy lokomotywy przy I
max
const
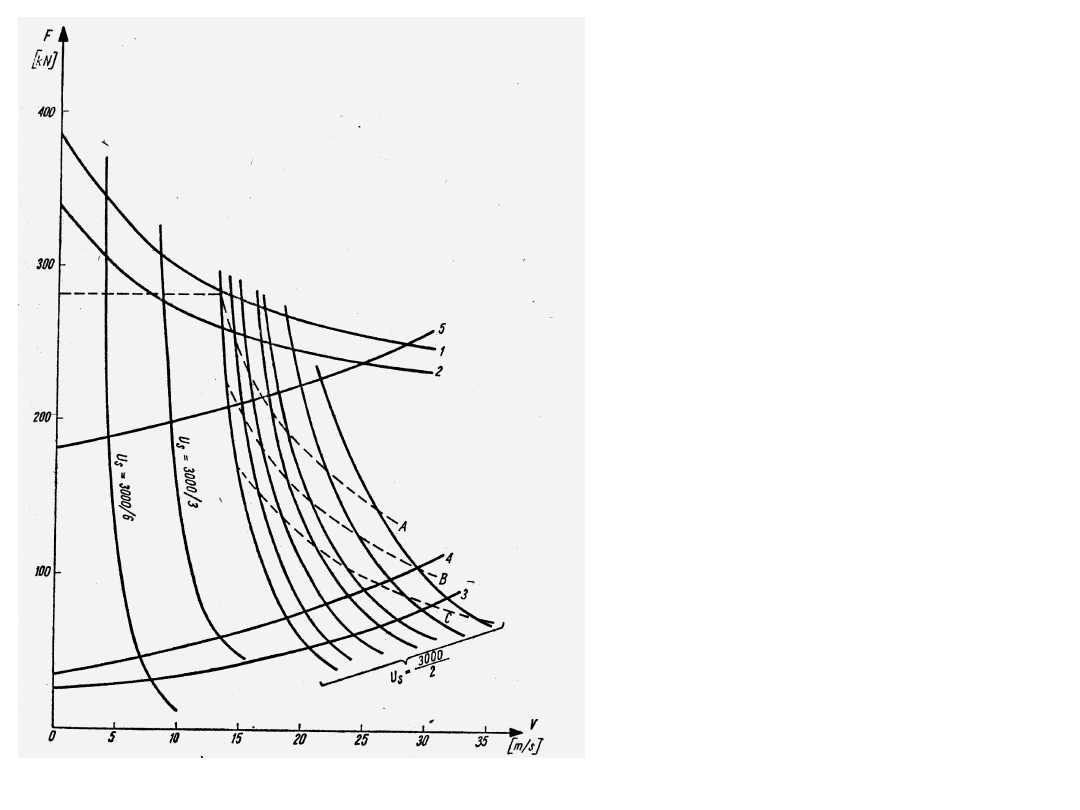
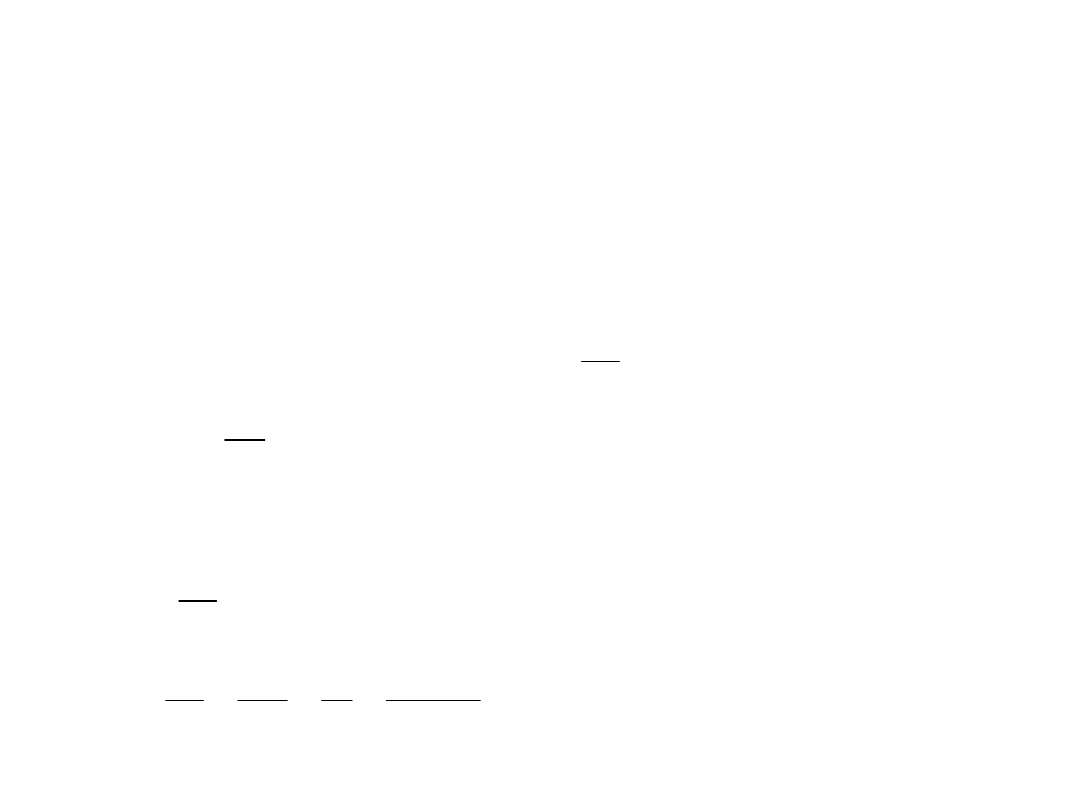
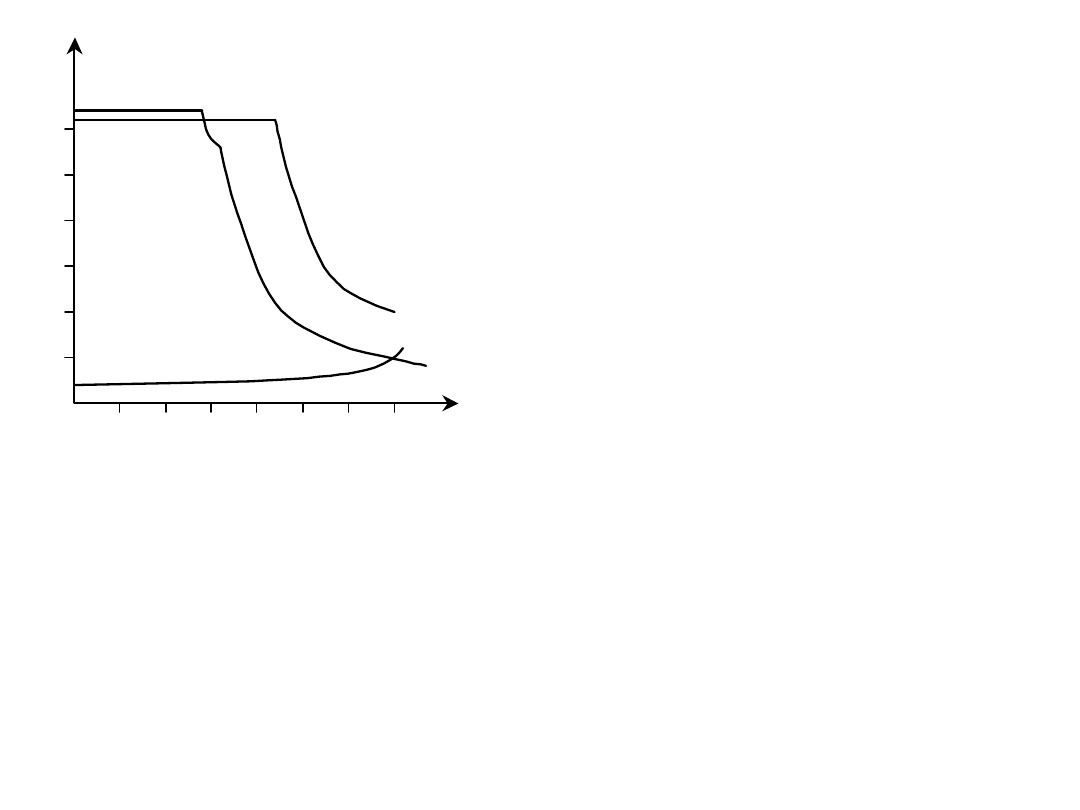
Charakterystyki trakcyjne
lokomotywy 6-silnikowej
1, 2 – F
L
(v) dla f
0
=0,33 oraz
f
0
=0,25
3, 4, 5 – opory ruchu z
pociągiem: 3 – 1000 t,
i=0
0
/
00,
4 – 2400 t,
i=0
0
/
00
,
5 –
2400 t, i=6
0
/
00
.
A – I = 440 A = const
(rozruch)
B – I = 370 A = const (prąd
godzinny)
C – I = 300 A = const
osłabienie pola w = 0,74;
0,55; 0,42; 0,36; 0,28; 0,22
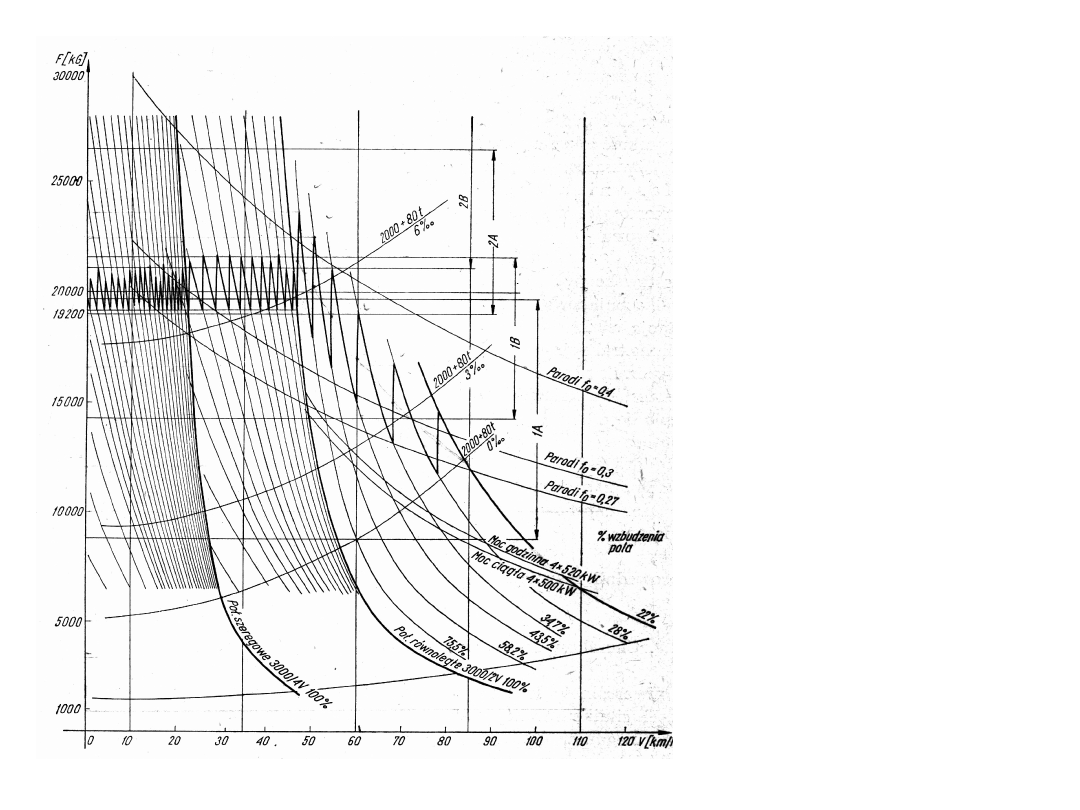
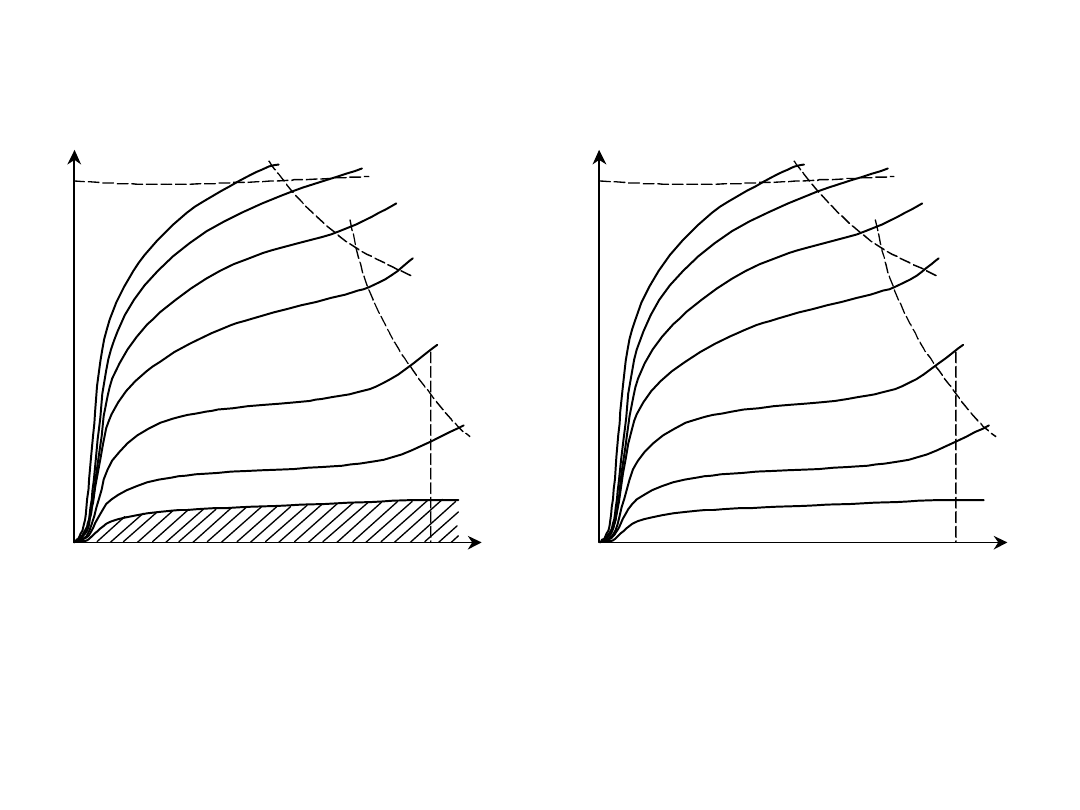
Charakterystyki
lokomotywy EU-07
1A, 1B, 2A, 2B –
zakresy
nastawienia
przekaźnika
samoczynnego
rozruchu
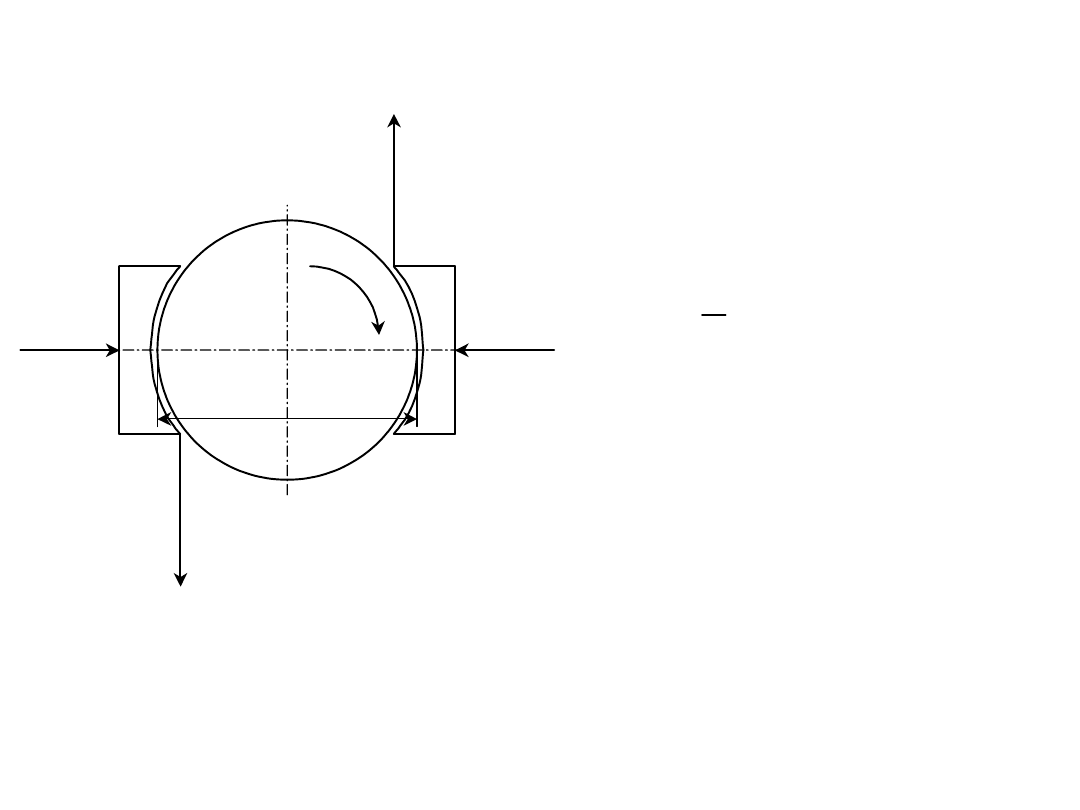
Hamowanie mechaniczne
D
H/2
H/2
F
h
/2
F
h
/2
Hamowanie przez dociskanie
klocków hamulcowych do koła
Siła hamująca F
h
wywołuje
moment hamujący M
h
.
h
h
F
D
M
2
H
F
h
gdzie: H – siła nacisku
na koło,
μ – współczynnik
tarcia.

Hamowanie elektryczne
Hamowanie elektryczne uzyskuje się przez zamianę charakteru
pracy silników trakcyjnych z silnikowego na prądnicowy. Energia
kinetyczna pociągu hamowanego lub energia potencjalna
pociągu zjeżdżającego ze spadku zostaje w prądnicy zamieniona
na energię elektryczną. Energię tę niszczy się zamieniając na
ciepło w opornikach lub wysyła do sieci trakcyjnej. Występują
zatem dwa rodzaje hamowania elektrycznego: hamowanie
oporowe oraz hamowanie rekuperacyjne czyli z odzyskiem
energii.
Hamowanie elektryczne nie może w pełni zastąpić hamowania
pneumatycznego, w przypadku pociągów prowadzonych przez
lokomotywę. Nie może być jedynym rodzajem hamowania, w
które wyposażona jest lokomotywa. Wynika z ograniczonej mocy
prądnic.
Możliwe jest przyhamowywanie pociągów na spadkach.
W lekkich pociągach zespolonych czy pojazdach komunikacji
miejskiej, gdzie duży jest procent osi napędnych (hamujących)
możliwe jest stosowanie hamowania elektrycznego nie tylko do
przyhamowania, ale również do zatrzymania.
Jeżeli pociąg hamowany jest ze stałym opóźnieniem a, to
maksymalna moc hamowania wyraża się zależnością:
6
,
3
6
,
3
v
a
m
v
F
N
[kW], jeżeli m[t], v[km/h], gdyż
[Nm/s=W]
Moc ta maleje od wartości maksymalnej, jaka występuje przy
prędkości początku hamowania do zera przy zatrzymaniu.
Moce maksymalne N’ przypadające na jedną prądnicę są
następujące:
pociąg m[t] α v[km/h]
a[m/s2] N[kW]
N’[kW]
towar. B
0
B
0
1800 1,03 40
0,4 8240
2060
osob. B
0
B
0
450 1,05 80
0,6 6300
1575
zespół trakc. 450 1,1
80
0,9 9900
825
(3•dmd)
Wykorzystanie hamowania elektrycznego do
przyhamowywania pociągów na dużych spadkach w celu
utrzymania prędkości na właściwym poziomie.
Przy jeździe pociągu na spadku jednostkowa siła
przyspieszająca wynosi
(i-w), zaś przyspieszenie:
1000
)
(
1000
g
w
i
g
f
G
g
F
a
p
p
Moc N[kW] w tym przypadku wyraża się wzorem:
3600
)
(
v
w
i
g
m
N
i
Przykładowo, pociąg o masie 500 t i α = 1,06 zjeżdżając ze
spadku 24
0
/
00
ze stałą prędkością 50 km/h, przy oporach
ruchu w ≈ 2,6
0
/
00
, ma moc 1458 kW, czemu odpowiada
4∙364,5 kW.
S
n
I
S
P
n
I
h
R
h
A
B
E
F
F
A
B
E
I
S
M
S
M
h
M
h
M
S
M
e
Schematy ideowe
silnika trakcyjnego
przy pracy
silnikowej i
prądnicowej
Moment hamujący M
h
silnika w funkcji prądu
o
o
e
h
M
I
c
M
M
M
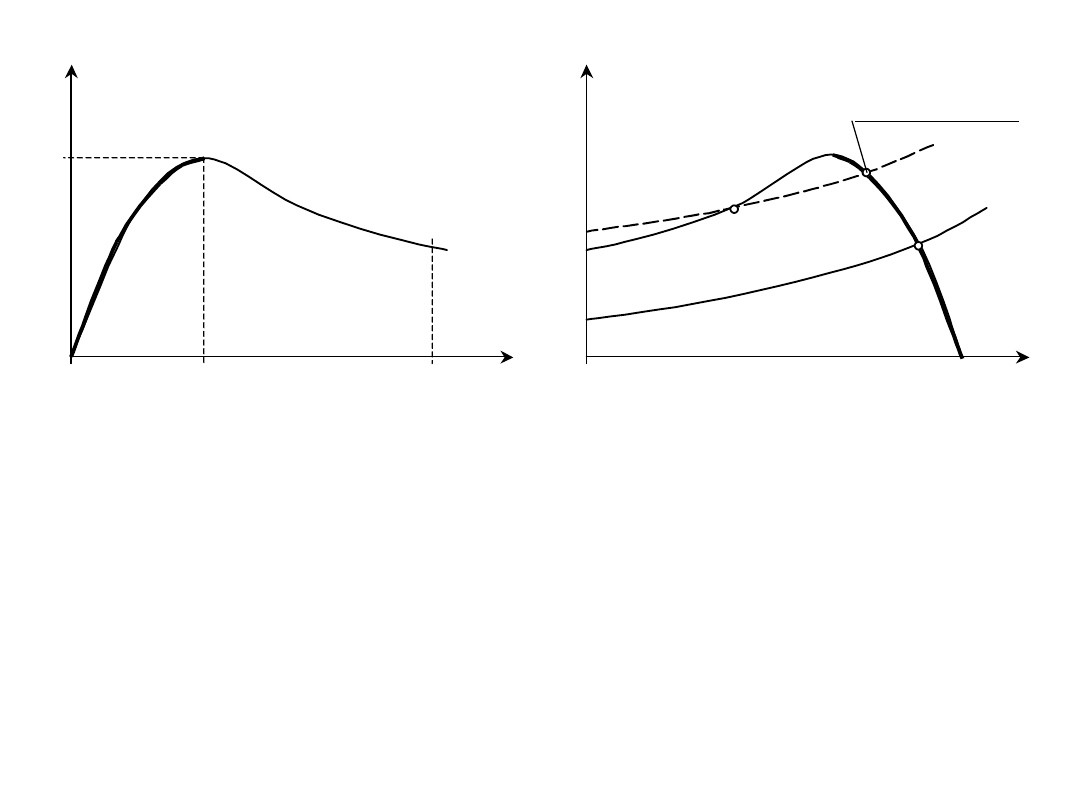
Przebieg charakterystyk v
p
(I), gdzie v
p
- prędkość przy pracy
prądnicowej silnika trakcyjnego.
Dla jednej prądnicy po zamknięciu jej obwodu opornikiem R
h
można zapisać:
E=cΦv
p
=I(R+R
h
)
Jeżeli w lokomotywie jest m
s
silników połączonych szeregowo i
m
r
silników połączonych równolegle, to powyższa zależność ma
postać:
R
I
m
R
m
m
R
I
m
I
m
R
I
R
m
v
c
m
s
h
s
r
s
r
h
s
p
s
h
s
r
R
m
m
R
R
stanowi rezystancję zastępczą
obwodu
Z zależności cΦv
p
=IR’ uzyskuje się:
R
R
c
I
v
p
IR
U
Iv
E
Iv
v
c
Iv
c
I
I
V
p
V
max
R
1
’ = R
U
max
F
max
I
max
V
min
R’ = 1
R’
F
h
V
max
U
max
F
max
I
max
R’ = const
V
p
b)
a)
Charakterystyki V
p
(I) oraz V
p
(F) z
ograniczeniami
I
V
p
V
1
”
0
V
1
’
R
7
I
max
I
0
V
2
’
V
2
”
V
3
’
V
3
”
V
4
”
V
4
’
V
5
’
V
5
”
V
6
”
V
7
”
V
6
’
V
7
’
V
8
’
R
6
R
5
R
4
R
3
R
2
R
1
R
0
I
S
Przebieg prędkości i prądu przy hamowaniu silnika
trakcyjnego
R
h
A
A
B
B
E
E
F
F
E
1
E
2
S
1
S
2
I
w
I
2
I
1
I
w
I
w
R
h
A
A
B
B
E
E
F
F
E
1
E
2
S
1
S
2
I
w
I
2
I
1
R
w
Układ hamowania
oporowego dla dwóch
silników
Układ hamowania oporowego
dla dwóch silników z
połączeniem wyrównawczym
1
5
3
2
6
4
1
5
3
2
6
4
Połączenia wyrównawcze przy
hamowaniu oporowym
lokomotywy 6-silnikowej
3
4
3
4
2
1
2
1
3
4
3
4
2
1
2
1
3
4
3
4
2
1
2
1
3
4
3
4
2
1
2
1
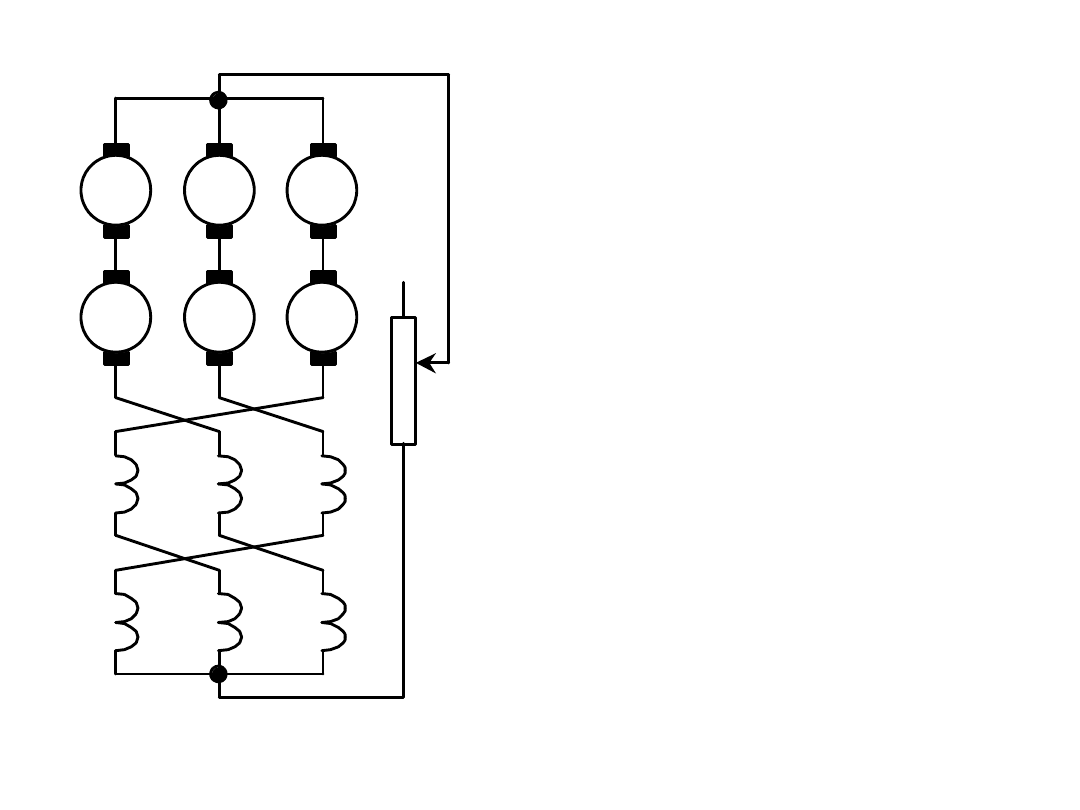
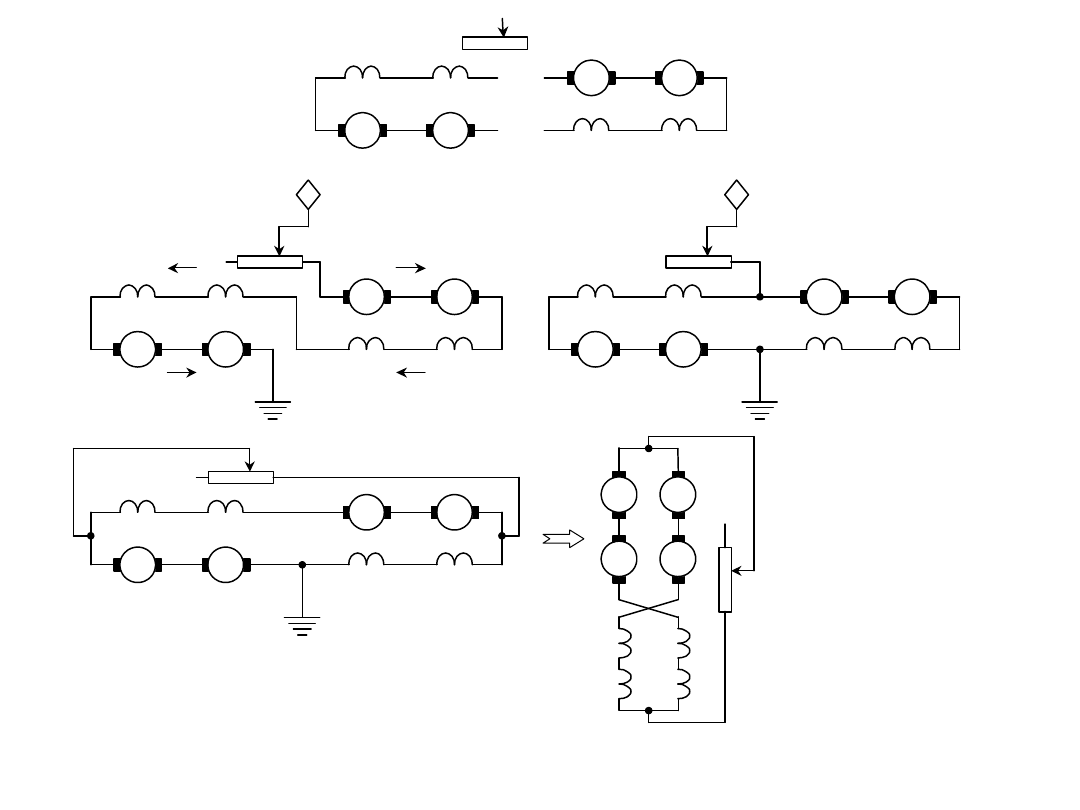
połączenie szeregowe
połączenie równoległe
hamowanie oporowe
1
3
2
4
1
3
2
4
Schematy ideowe przełączeń dla jazdy i hamowania oporowego
obwodu głównego lokomotywy 4-silnikowej
Hamowanie z odzyskiem energii
Przy hamowaniu rekuperacyjnym energia elektryczna jest
oddawana do sieci. Aby to było możliwe, SEM prądnicy musi być
większa od przypadającego na nią napięcia sieci o wewnętrzny
spadek napięcia.
IR
U
E
R
E
U
R
U
E
I
Hamowanie
z
odzyskiem
energii
mogłoby
być
stosowane przy prądnicach
szeregowych, jeśli udałoby się
podnieść
wartość
SEM,
spełniając
jednocześnie
warunek
statecznej
pracy.
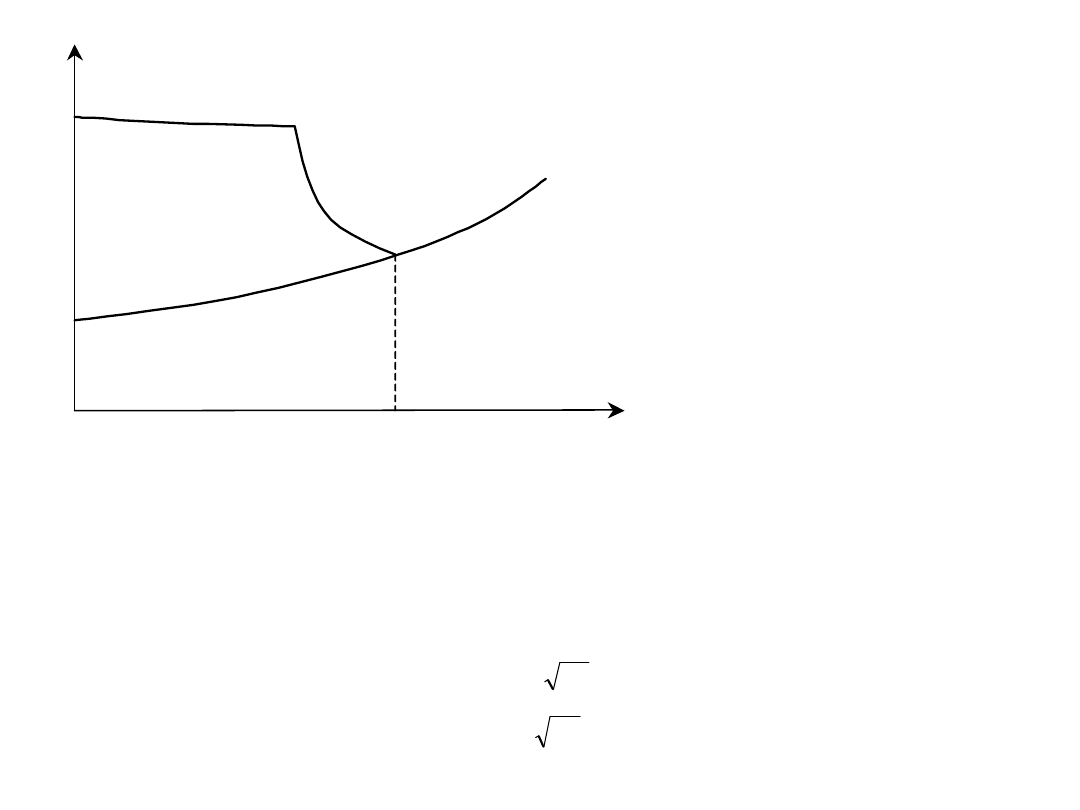
Problem ten wyjaśnia rysunek,
na którym charakterystyka
zewnętrzna
prądnicy
szeregowej
U=f(I)
przedstawiona jest wraz z
prostą U=const napięcia sieci.
U
I
uzw. szeregowe
uzw. obce
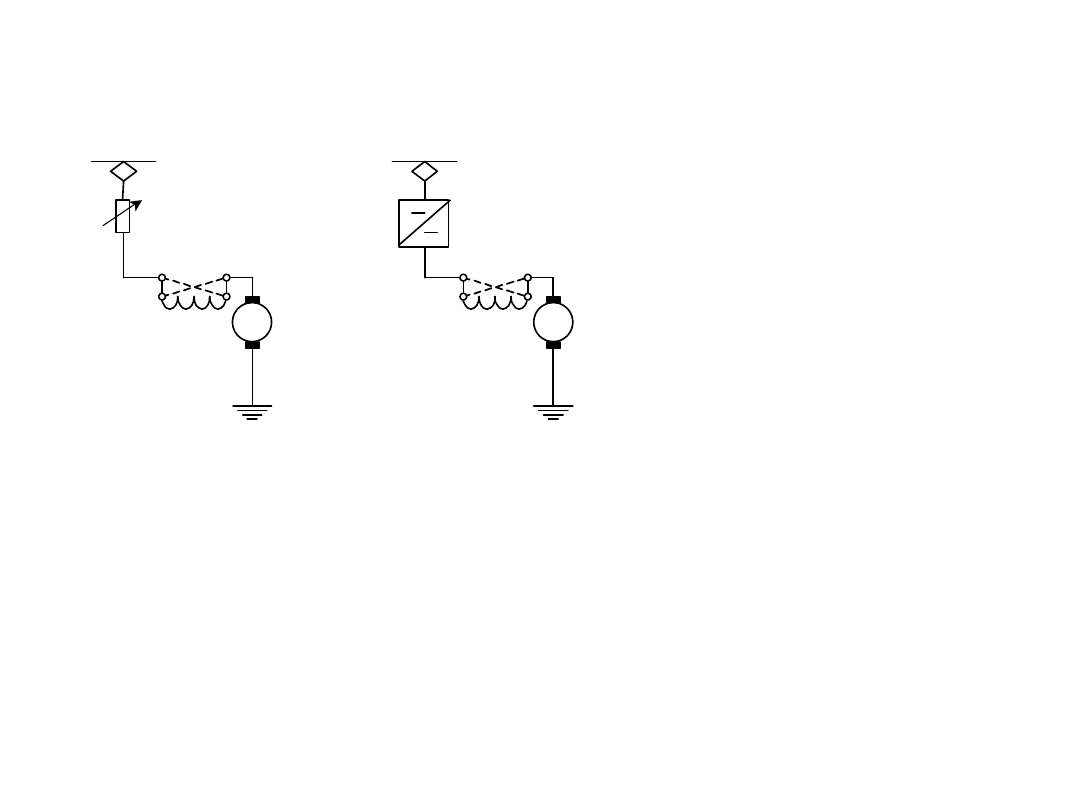
Regulacja prędkości silnika trakcyjnego prądu stałego
przez układ choppera
zamiast
M
jest
M
Schemat ideowy
impulsowej regulacji
napięcia zasilającego
silnik
Zalety stosowania rozruchu impulsowego są następujące:
•
niewielkie straty,
•
płynna, bezstykowa regulacja napięcia zasilającego silnik,
•
możliwość szybszego oddziaływania na obwód główny
lokomotywy,
•
wyeliminowanie grupowania silników (połączenia
szeregowego, szeregowo-równoległego i równoległego),
•
możliwość łatwego osłabiania pola,
•
możliwość łatwej realizacji hamowania elektrycznego –
oporowego, rekuperacyjnego i oporowo-rekuperacyjnego,
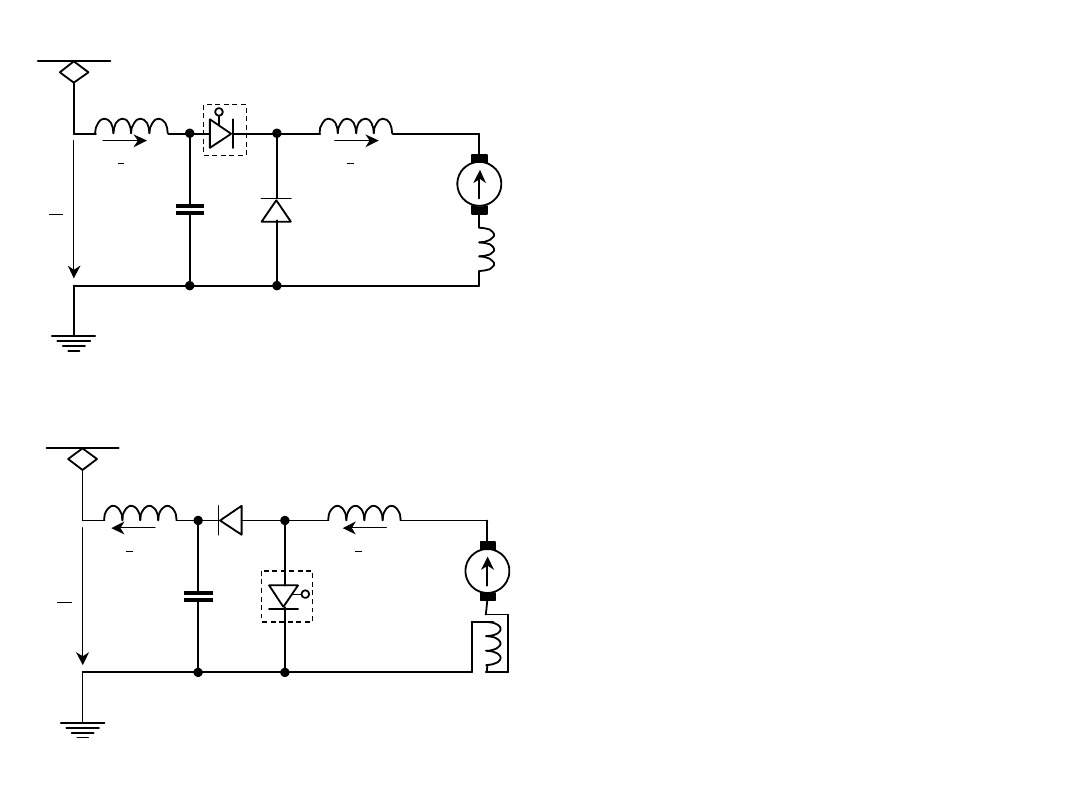
L
f
L
o
D
o
P
I
s
I
E
s
C
f
U
Podstawowy układ
przekształtnika impulsowego
dla pracy trakcyjnej
P – półprzewodnikowy
przerywacz,
L
f
, C
f
, - elementy filtru
wejściowego,
L
0
– indukcyjność
wygładzająca (I
s
– const),
D
0
– dioda zwrotna.
L
f
L
o
D
P
I
s
I
E
s
C
f
U
Podstawowy układ
przekształtnika
impulsowego przy
hamowaniu odzyskowym
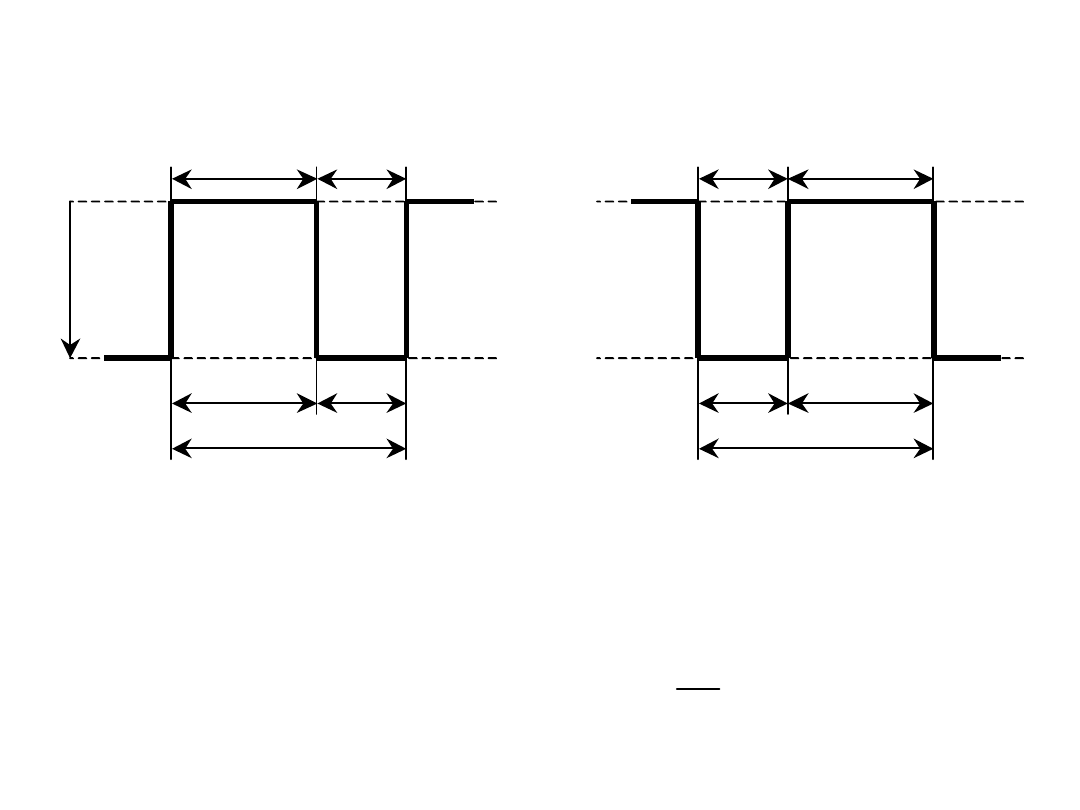
U
T
(1-)T
T
a)
t
A
t
B
T
t
A
t
B
T
(1-)T
b)
T – okres pracy przerywacza
γ – współczynnik wypełnienia impulsu
Napięcie na silniku
a) przy pracy trakcyjnej,
b) przy hamowaniu
T
t
A
Przy pracy trakcyjnej w czasie przewodzenia przerywacza do
silnika przyłożone jest napięcie zasilające U i przez silnik płynie
prąd I
s
. W czasie przerwy w przewodzeniu silnik nie jest zasilany,
a w jego obwodzie, zamkniętym diodą zerową D
0
, w dalszym
ciągu płynie prąd I
s
, podtrzymywany indukcyjnościami dławika L
0
i uzwojeń silnika. Zakłada się, że indukcyjność L
0
jest na tyle
duża, że
I
s
= const.
Średnie napięcie U
s
przyłożone do silnika będzie zmieniać się
liniowo z wartością współczynnika wypełnienia γ, od wartości
U
s
=0 przy γ=0 do wartości U
s
=U
przy γ=1.
U
U
s
Pomijając straty w układzie, na podstawie równości mocy na
wejściu i wyjściu układu, można napisać:
s
s
I
U
I
U
s
s
s
I
I
U
U
I
W przypadku rozruchu, przy stałym prądzie silnika I
s
, prąd
czerpany z sieci zależy liniowo od współczynnika wypełnienia
γ.

Przy hamowaniu rekuperacyjnym w okresie przewodzenia
przekształtnika napięcie na silniku jest równe zeru, a w
przedziale t
B
=(1-γ)T jest równe napięciu U kondensatora
wyjściowego. Gdy przekształtnik przewodzi, płynie przez
niego prąd silnika I
s
. Gdy przekształtnik nie przewodzi prąd
silnika przepływa przez diodę rozdzielającą D do sieci.
Podobnie jak w przypadku rozruchu zakłada się, że I
s
=const.
W tym przypadku zależności średniego napięcia na silniku i
średniego prądu wpływającego do sieci od regulowanego
współczynnika wypełnienia γ mają postać:
U
U
s
1
s
I
I
1
U
s
1
a)
U
I
s
1
I
U
s
1
b)
U
I
s
1
I
Zależność U
s
(γ) i I (γ) przy pracy trakcyjnej (a) i przy
hamowaniu (b)
U, I – napięcie, prąd pobierany z sieci (oddawany do
sieci),
U
s
, I
s
– napięcie, prąd silnika
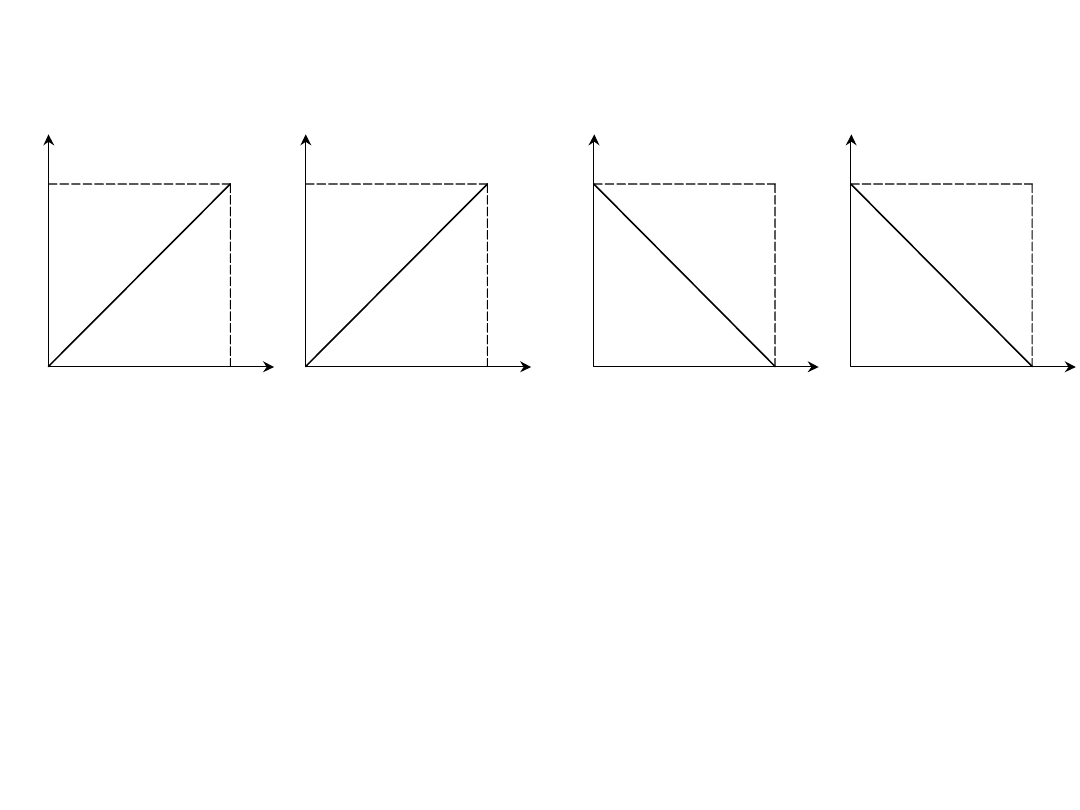
2 x 800A x 3300V
2 x 400A x 6500V
K
j1
K
h1
K
h2
K
j2
Układ dla jazdy i
hamowania utworzony na
bazie modułu IGBT
Kj – stycznik jazdy
Kh – stycznik hamowania
Moduły z
tranzystorami IGBT
W
s
L
f
R
d
THR
TR
M1
M2
TH
R
bw
SG1
R
h
C
f
TR
M3
M4
TH
R
bw
SG2
W
d
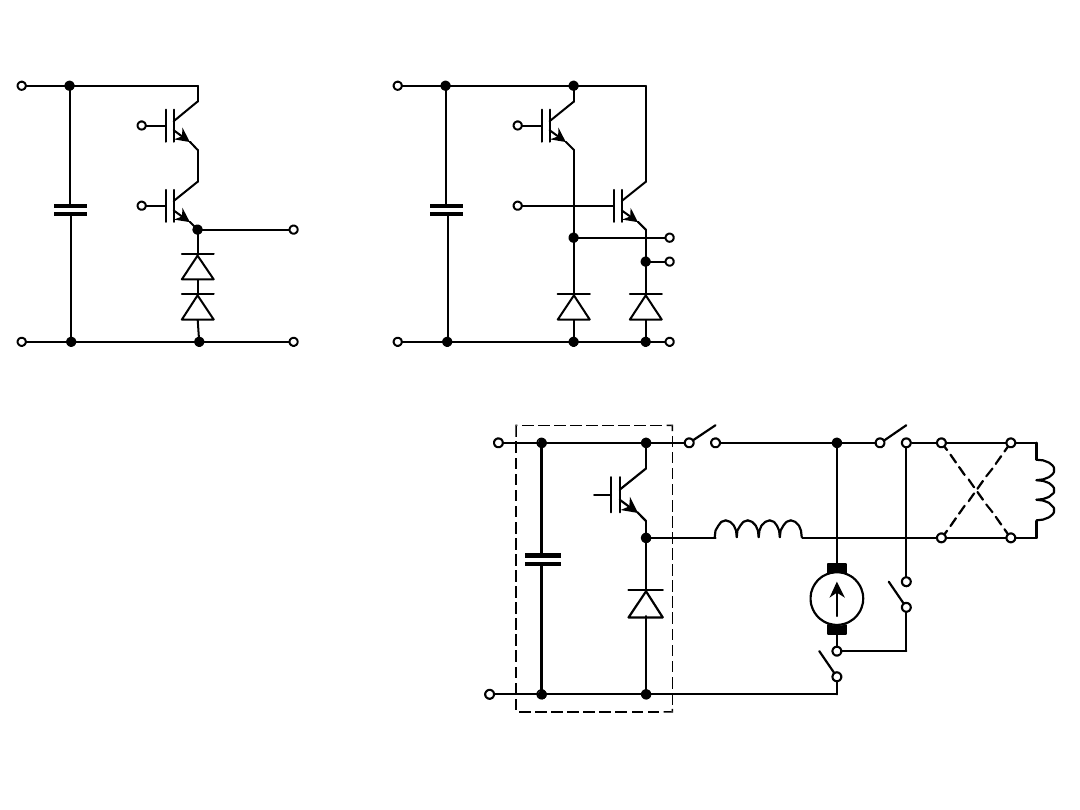
Obwód główny tramwaju 105Nm
W
S
– wyłącznik sieciowy, L
f
, C
f
– dławik i kondensator
filtru,
THR – tranzystor hamowania oporowego, R
h
– rezystor hamowania
oporowego,
TR – tranzystor rozruchu, TH – tranzystor
hamowania,
M1, M2, M3, M4 – silniki trakcyjne (LTa 220),
SG1, SG2 – styczniki grup silników, R
bw
– rezystancja
bocznikująca wzbudzenie,
R
d
– rezystancja dodatkowa rozwierana przy hamowaniu dla V > 40 km/h i
gdy U
z
< 500 V
rozruch przy f 800Hz i przesunięciu 180,
I
rozr
= 40 250 A w każdej grupie,
I
h
= 40 220 A,
hamowanie odzyskowe dla 400 V < U
z
< 750 V,
gdy U
z
> 750 V (brak odbioru na sieci) włączany jest THR (100
1000 Hz).
F
[kN]
V [km/h]
W
30
10 20 30 40 50 60 70
20
10
F
R
F
H
Charakterystyka trakcyjna
tramwaju 105 Nm dla U =
650V
F
R
– siła rozruchowa,
F
H
– siła hamowania
W – opory ruchu, tramwaj
obciążony 26 Mg
M
s
stabilny punkt pracy
M
u
s
u
1
M
n
W
n
1
Charakterystyki momentu silnika asynchronicznego M =
f(s) i M = f(n)
Moment maksymalny występuje przy tzw. poślizgu utyku
s
u
, który spełnia warunek dM/ds=0, s
u
≈R
2
/X
2
. Zwykle
X
2
>R
2
, więc moment maksymalny, zwany momentem
utyku M
u
występuje przy małych wartościach poślizgu.
Regulacja prędkości trójfazowego asynchronicznego
silnika trakcyjnego
Jeżeli do uzwojeń stojana zostanie dołączone 3-fazowe napięcie U o
częstotliwości f, powstanie wirujące pole magnetyczne o prędkości
wirowania n
1
p
f
n
1
1
1
1
2
n
n
n
n
n
s
Wirnik obraca się z prędkością n w kierunku zgodnym z ruchem
pola wirującego. Prędkość obrotowa n musi być mniejsza od n
1
,
aby linie pola magnetycznego przecinały przewody wirnika.
Różnicę stanowi prędkość n
2
określająca prędkość obrotową pola
wirującego względem wirnika.
p
f
s
n
s
n
1
1
1
Moment obrotowy silnika asynchronicznego wyraża się ogólną
zależnością:
2
2
cos
I
c
M
gdzie:
c - stała konstrukcyjna silnika
I
2
- prąd w uzwojeniu wirnika,
Φ - wirujący strumień magnetyczny
wytworzony przez prąd płynący w
uzwojeniach stojana,
φ
2
- kąt między prądem i napięciem w
uzwojeniu wirnika.
s – poślizg
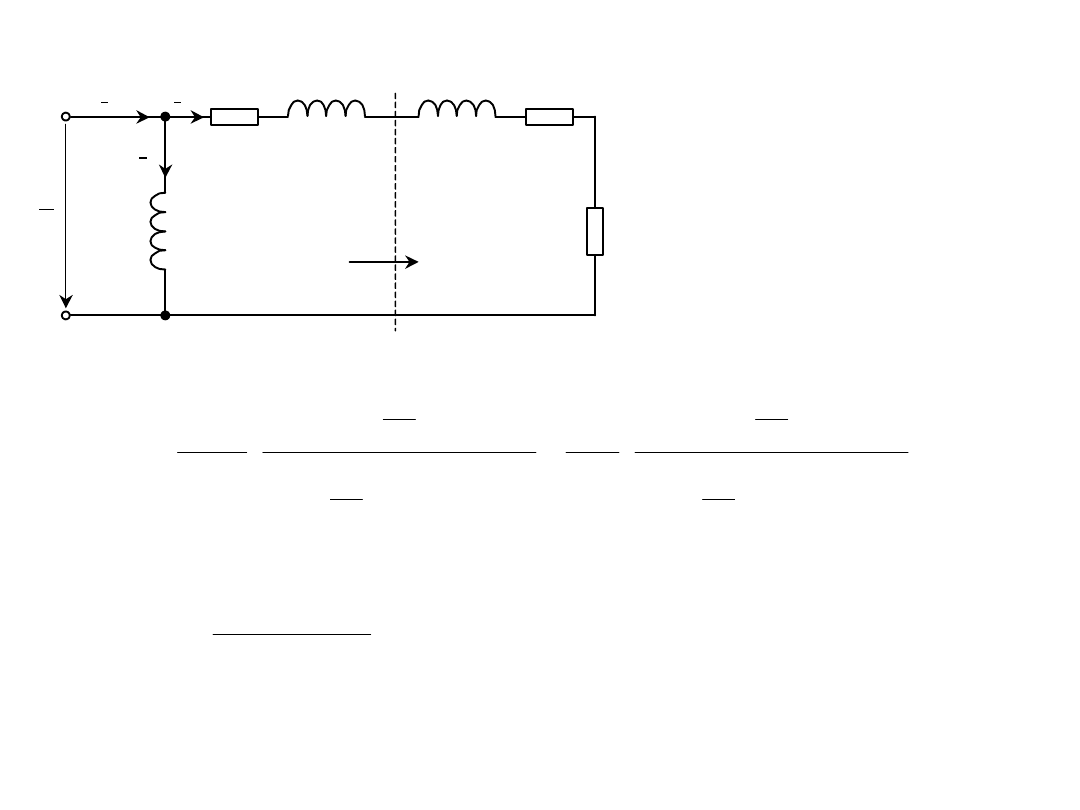
R
2
’
szczelina
R
1
I
1
I
2
’
I
X
1
X
2
’
U
Schemat zastępczy
silnika
asynchronicznego
klatkowego
2
'
2
1
2
'
2
1
'
2
1
2
2
'
2
1
2
'
2
1
'
2
2
2
3
3
X
X
s
R
R
s
R
n
U
X
X
s
R
R
s
R
pU
M
2
'
2
2
'
2
'
2
X
s
R
R
s
c
M
R
2
’, X
2
’ to rezystancja i reaktancja
uzwojenia wirnika przeliczone na
stronę stojana.
M
n
Regulacja R
2
M
n
Regulacja U
n
1
n
1
Regulacja p
M
n
n
1
Regulacja f
M
n
n
1
Sposoby regulacji prędkości obrotowej silnika
asynchronicznego
lub
M
M
M
M
DC
AC
M
M
lub
M
M
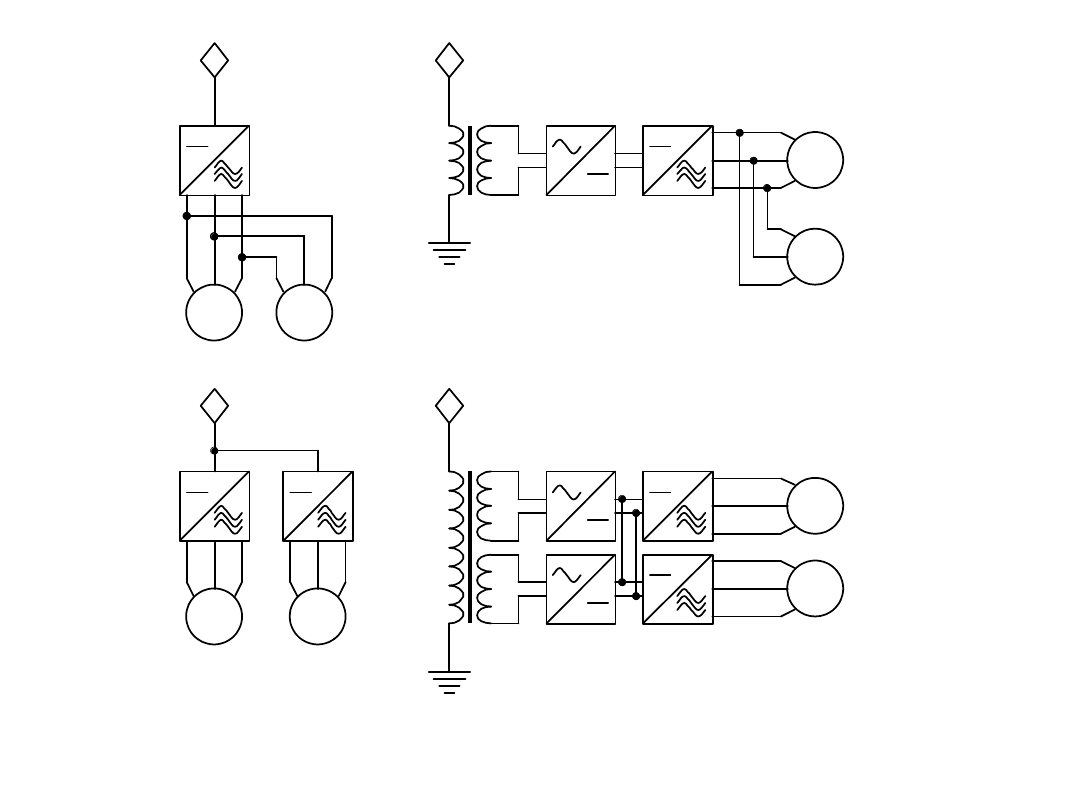
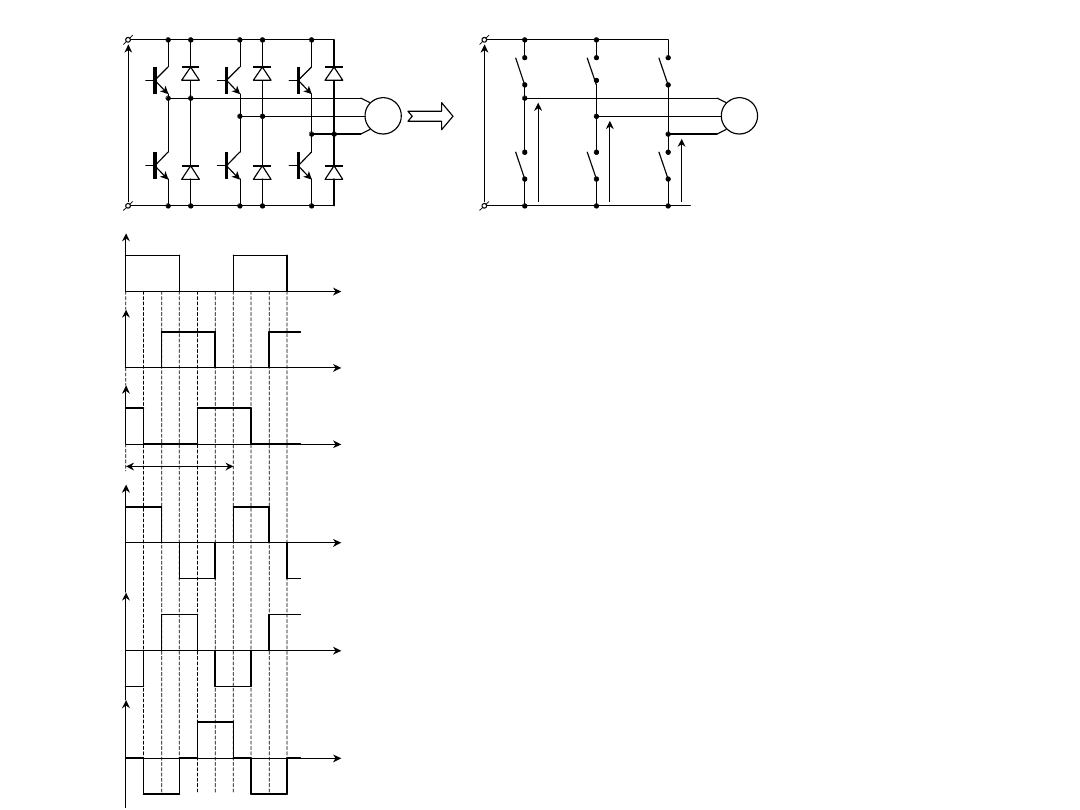
Schemat ideowy zasilania asynchronicznego silnika
trójfazowego poprzez falownik
U
R
T
t
M
U
+
-
M
U
+
-
U
R
U
S
U
T
„g”
„d”
t
t
U
S
U
T
t
U
RS
U
ST
U
TR
t
t
Ilustracja zasady działania
falownika
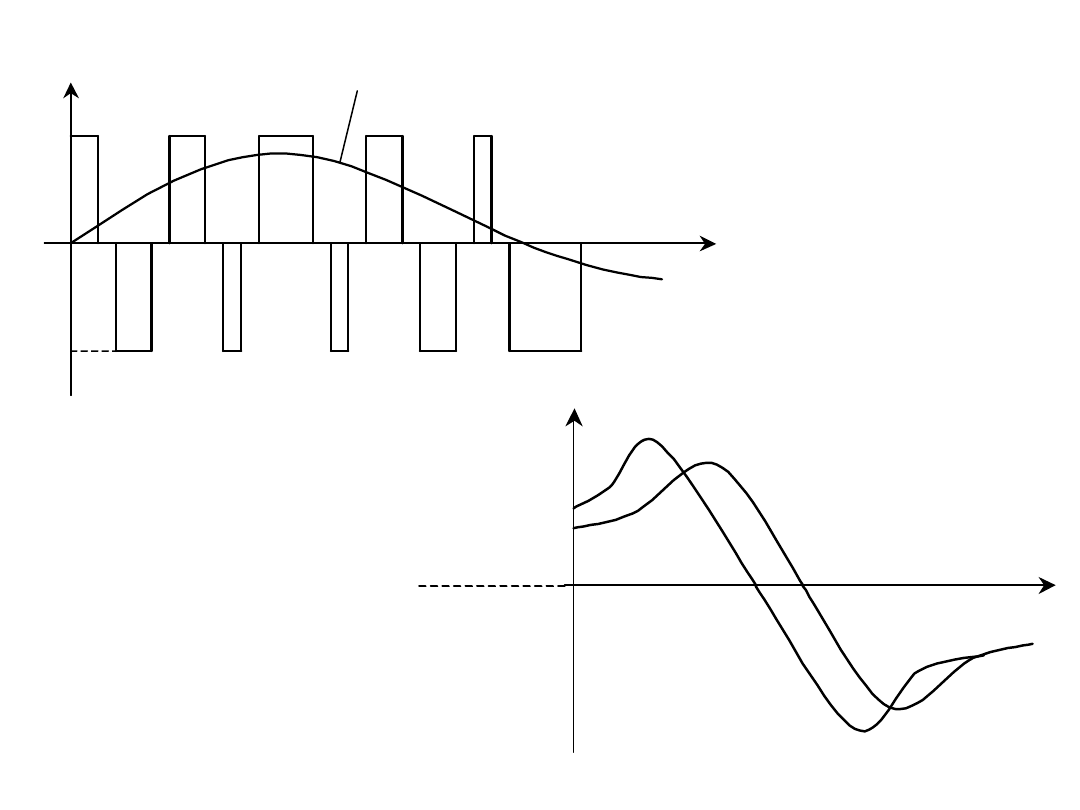
+U
-U
t
U
1h
F
praca
silnikowa
v
praca
prądnicowa
Modulowana fala
prostokątna
napięcia i pierwsza
harmoniczna
Zakres pracy silnikowej
i prądnicowej przy
napędzie
asynchronicznym
Zasady regulacji prędkości obrotowej indukcyjnych silników
trakcyjnych
'
2
1
'
2
2
'
2
1
2
1
'
2
X
X
R
X
X
R
R
s
u
'
2
1
1
2
2
'
2
1
2
1
1
1
2
1
1
4
3
X
X
n
U
k
X
X
R
R
n
U
M
u
'
2
1
1
X
X
R
gdy
ż
p
f
n
1
poniewa
ż:
1
1
1
2 fL
L
X
2
'
2
'
2
2 sfL
L
X
gdzie f – częstotliwość
napięcia stojana,
można
przyjąć:
2
f
U
k
M
u
f
k
s
u
1
a)
M
n
0,6f
M
n
n
1
0,8f
f
n
1
b)
M
u
0,6U
0,8U
U
M
u
Regulacja prędkości silnika asynchronicznego
a) przez zmianę częstotliwości napięcia
zasilającego silnik przy jednoczesnej
regulacji tego napięcia
b) przez zmianę napięcia zasilającego silnik
M
v
M
max
V
max
M
op
P
max
Wymagany przebieg
M(v) przy regulacji
prędkości silnika
trakcyjnego
Przy zastosowaniu falownika zasilającego silnik asynchroniczny
napięciem o zmiennej wartości i częstotliwości, regulując
prędkość przez zmianę częstotliwości należy jednocześnie
regulować wartość napięcia w sposób następujący:
M~(U/f)
2
, dla uzyskania
M=const U~f
P~U
2
/f, dla uzyskania
P=const U~
M
fP
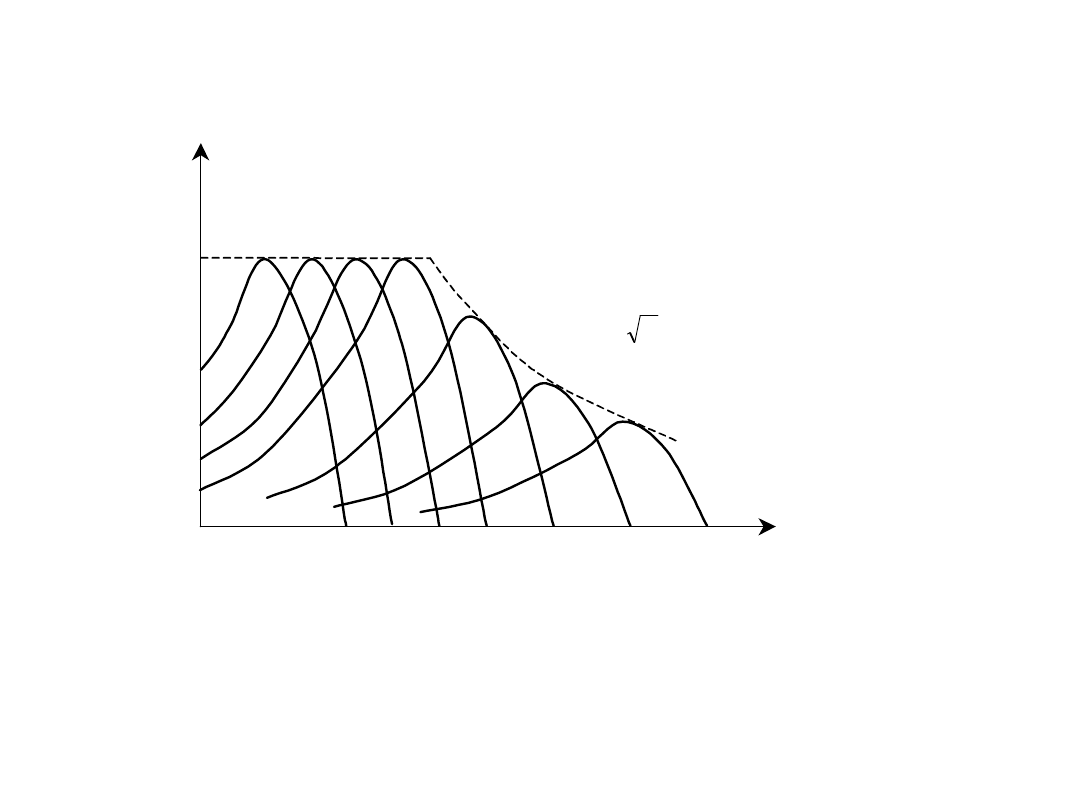
Łącząc oba sposoby regulacji uzyskuje się żądany przebieg
M(v)
M
v
f U ~
f
f U ~
f
Regulacja prędkości silnika asynchronicznego przez
jednoczesną zmianę częstotliwości i wartości napięcia
zasilającego
M
filtr wejściowy
W
G
R
h
falownik
P
h
układ
hamowania
oporowego
Schemat ogólny obwodu głównego taboru z silnikami
asynchronicznymi
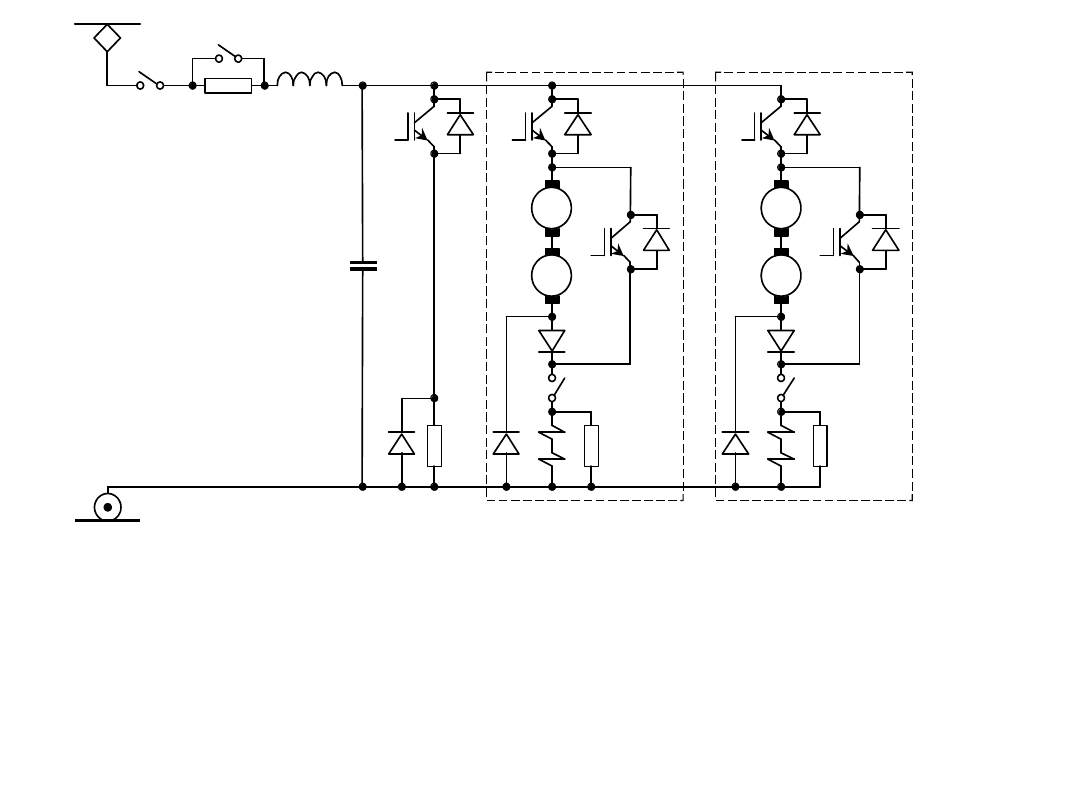
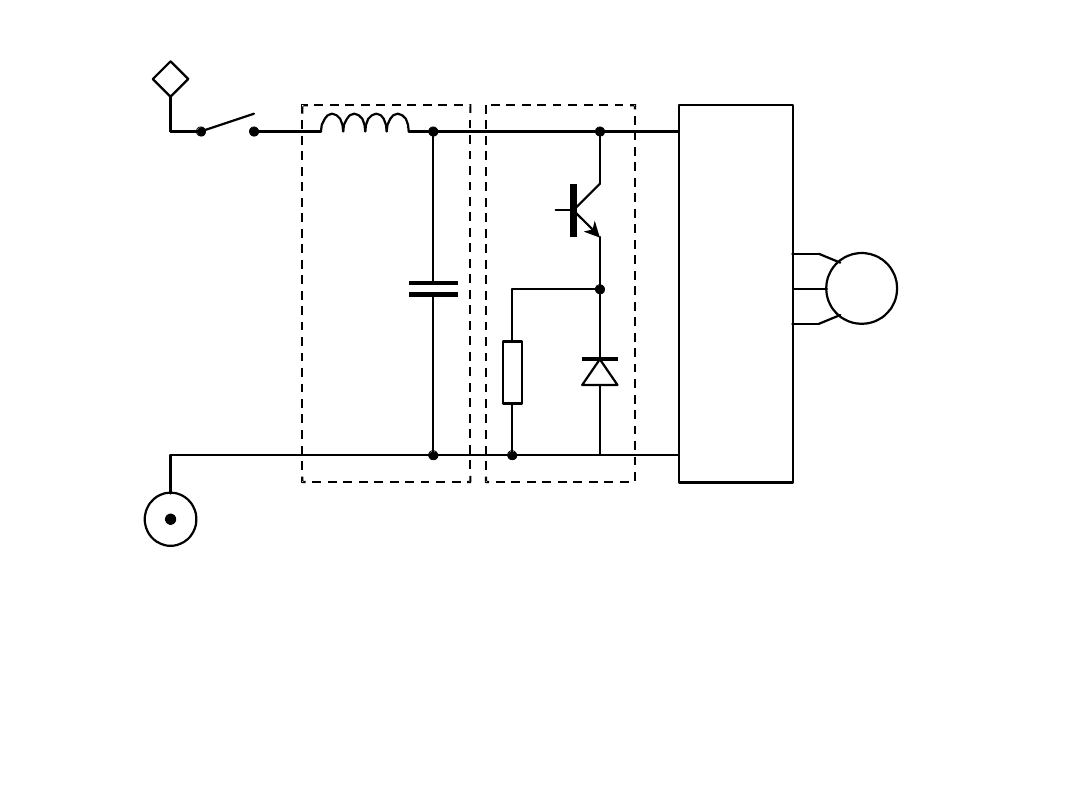
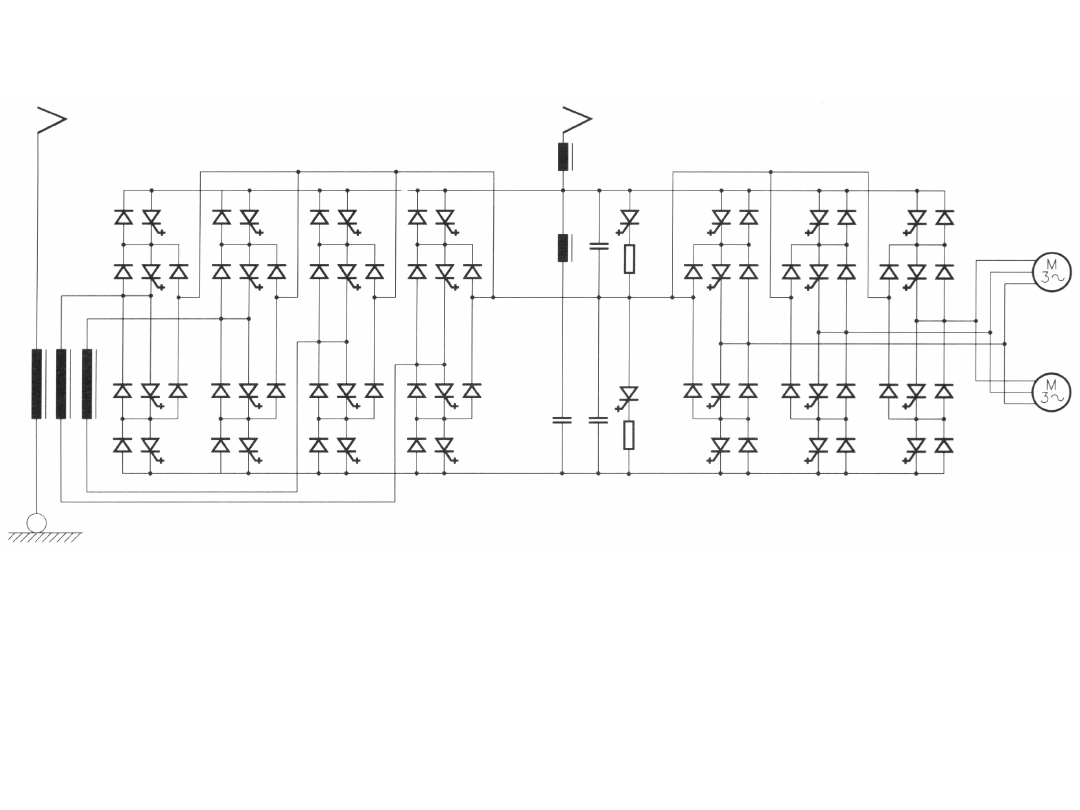
Obwód główny z pośrednim zasilaniem falowników (układ
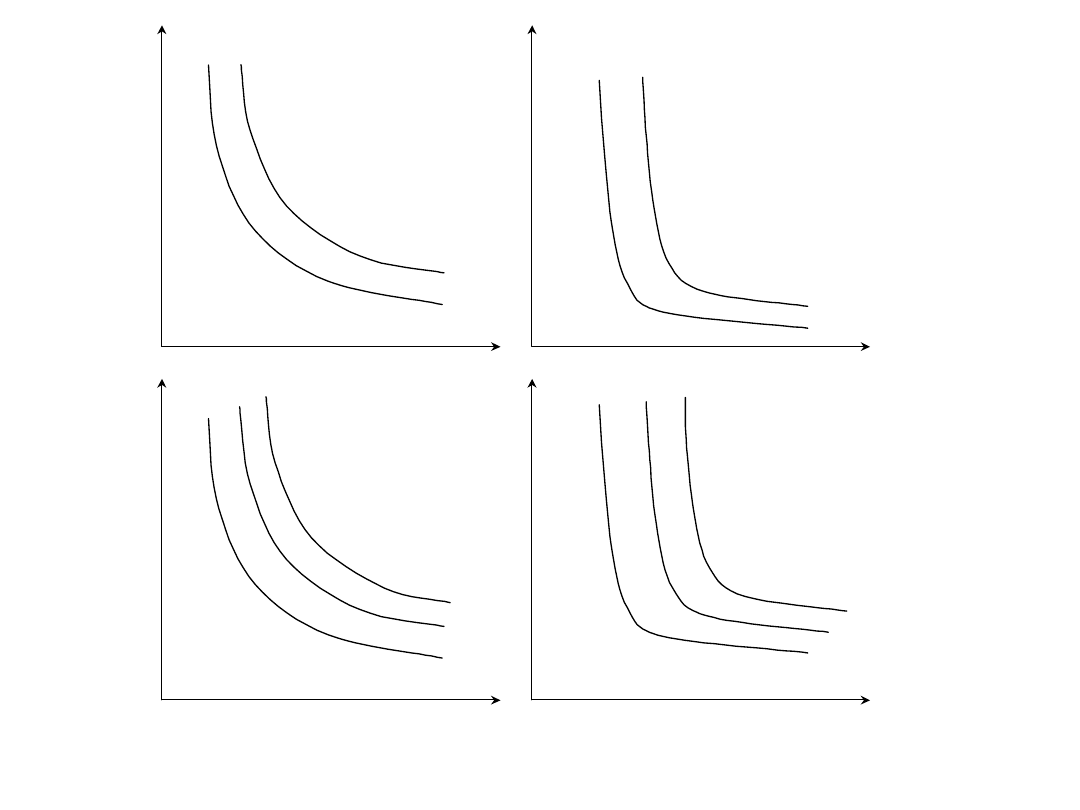
dwupoziomowy) dla jednego wózka
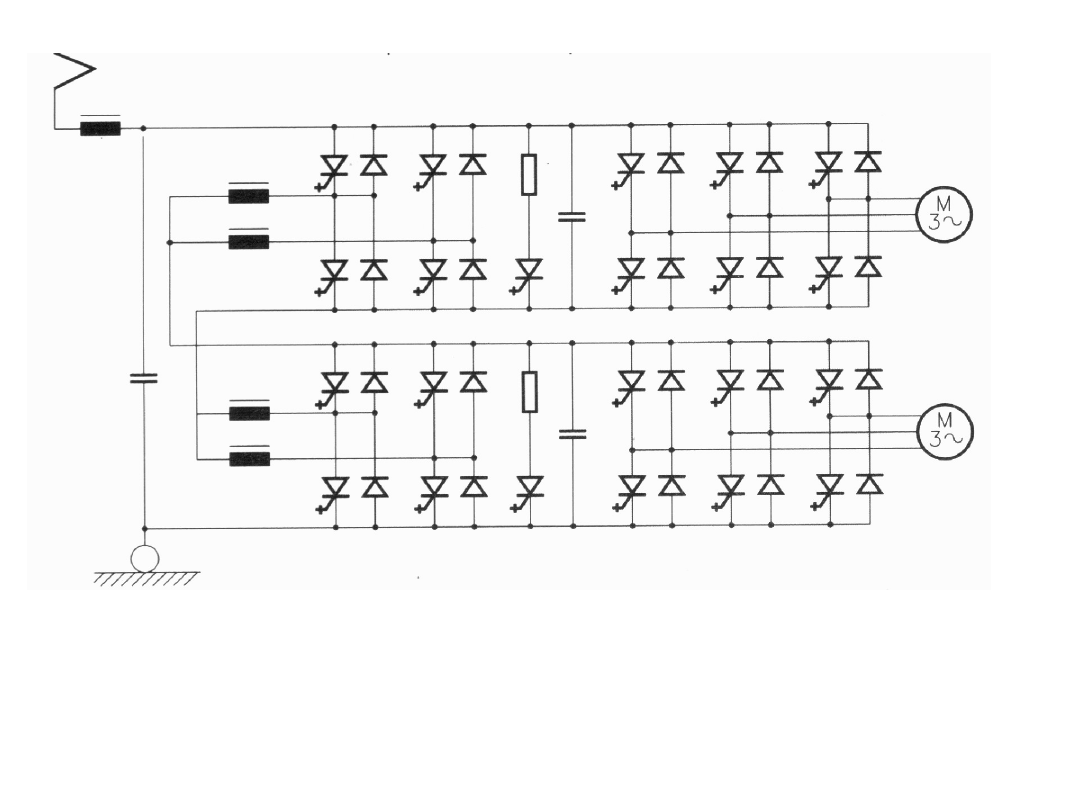
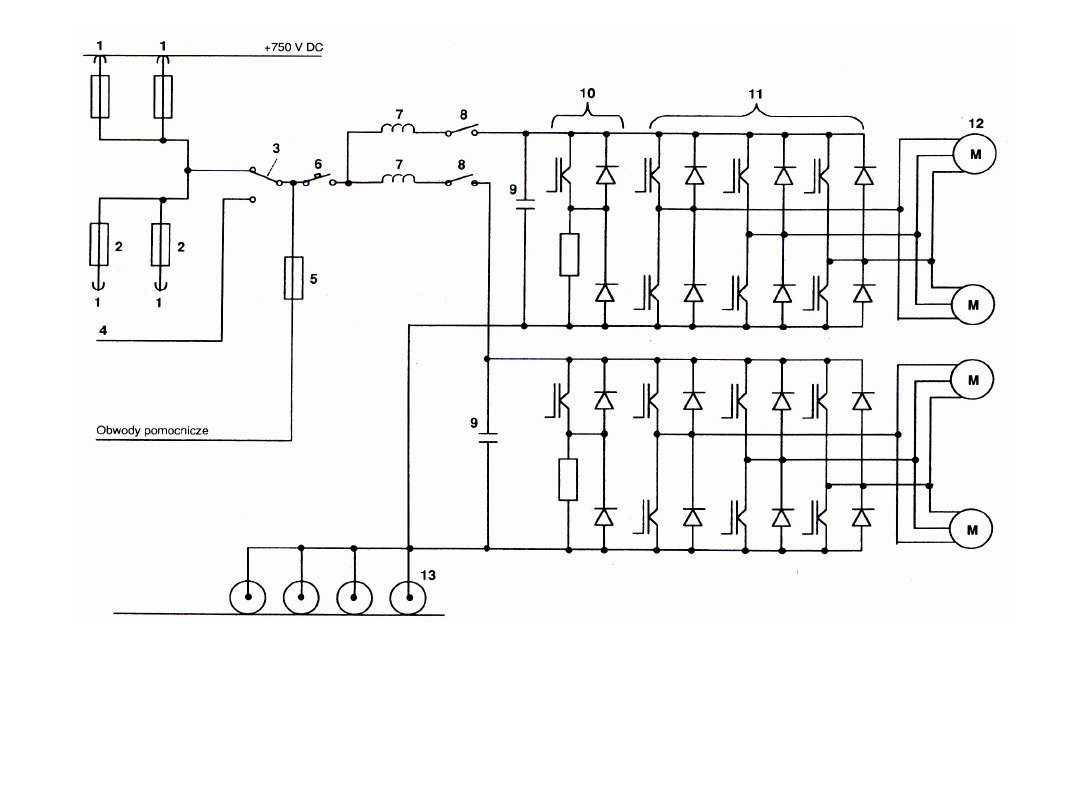
Obwód główny z bezpośrednim zasilaniem falowników i
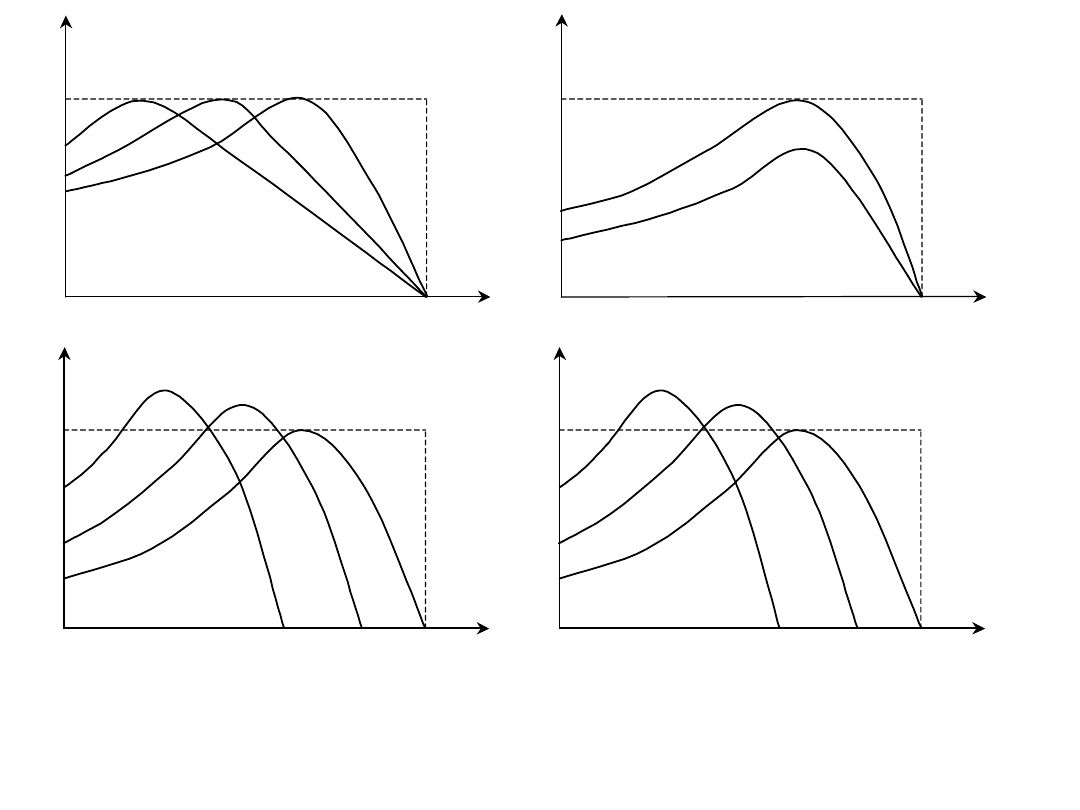
równoległym zasilaniem silników (układ trójpoziomowy)
dla jednego wózka
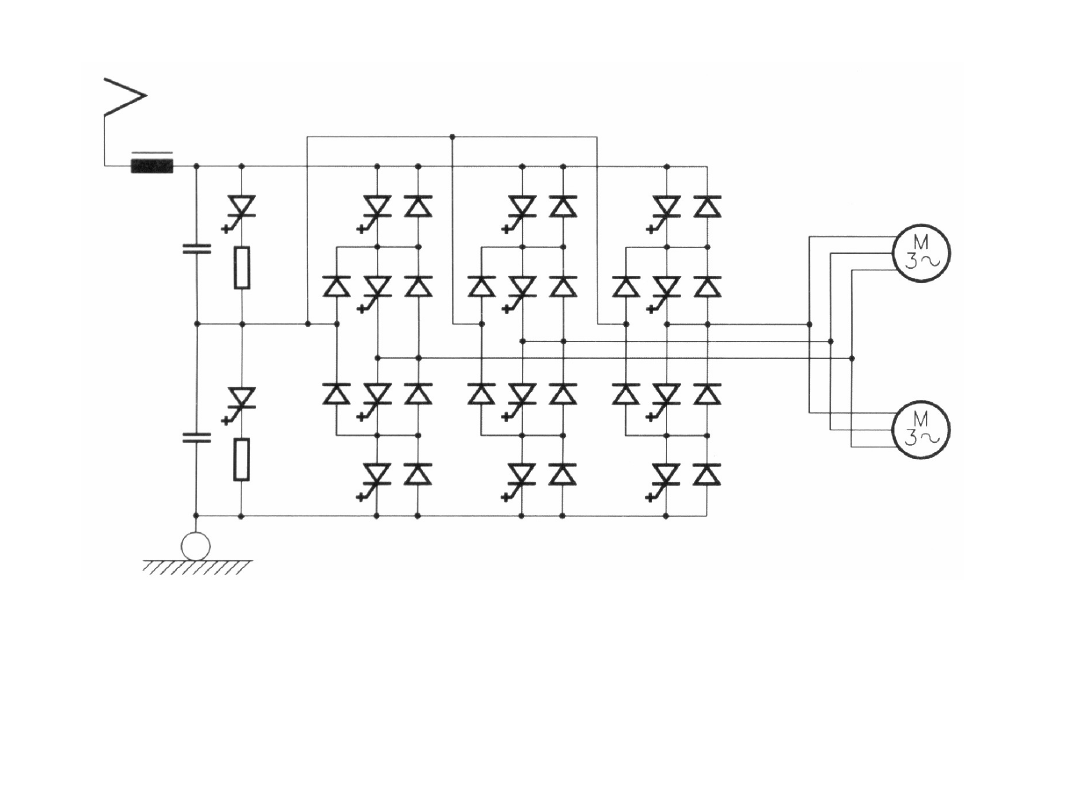
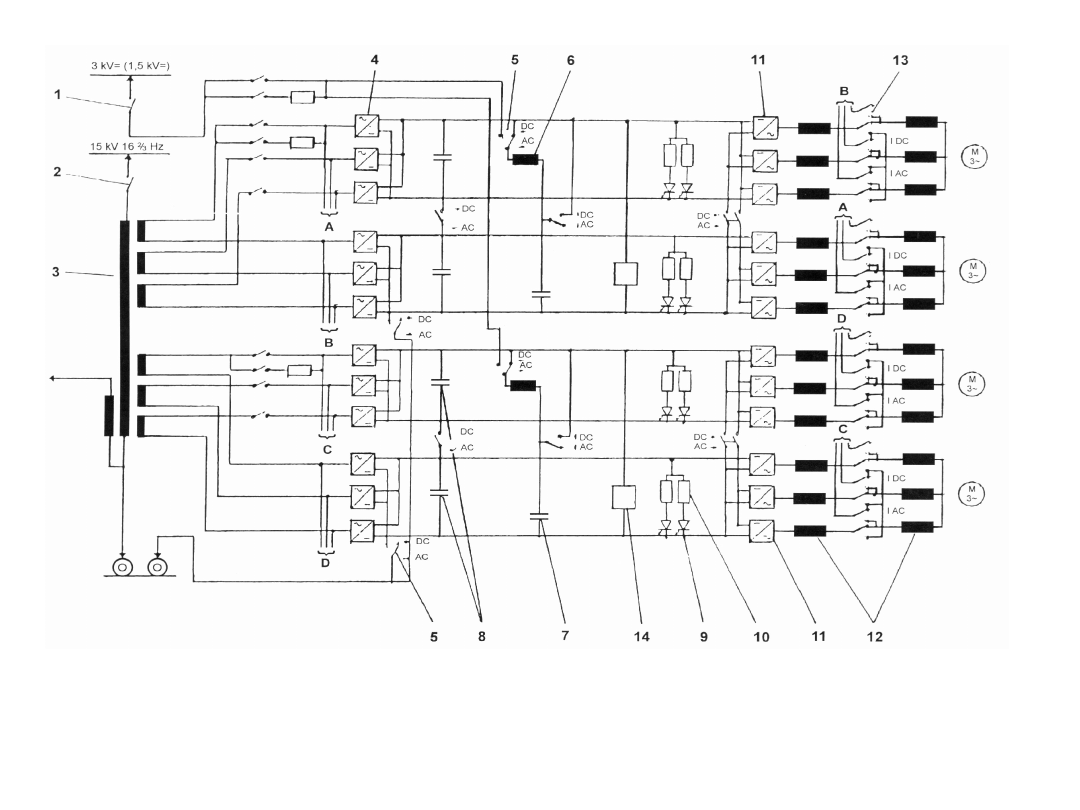
Obwód główny lokomotywy 2-systemowej: falowniki
dwupoziomowe zasilane przez przekształtniki
czterokwadrantowe (3 moduły) dla systemu AC lub przez
choppery dla systemu DC, zasilanie silników indywidualne
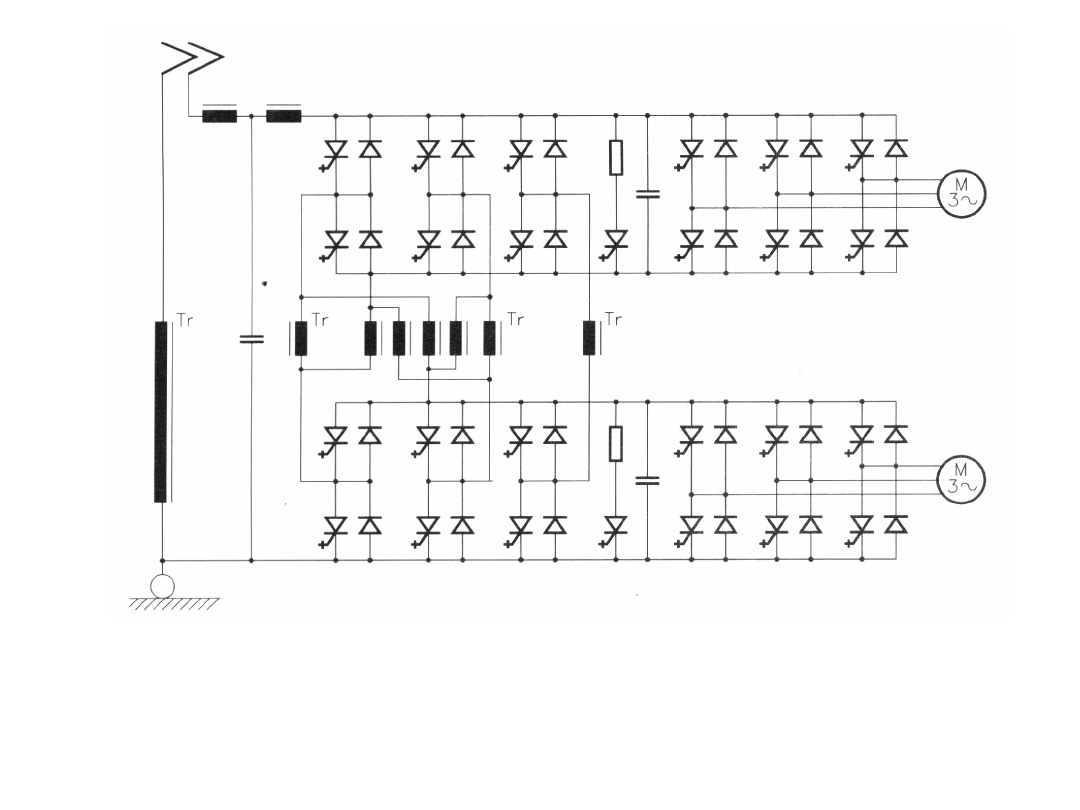
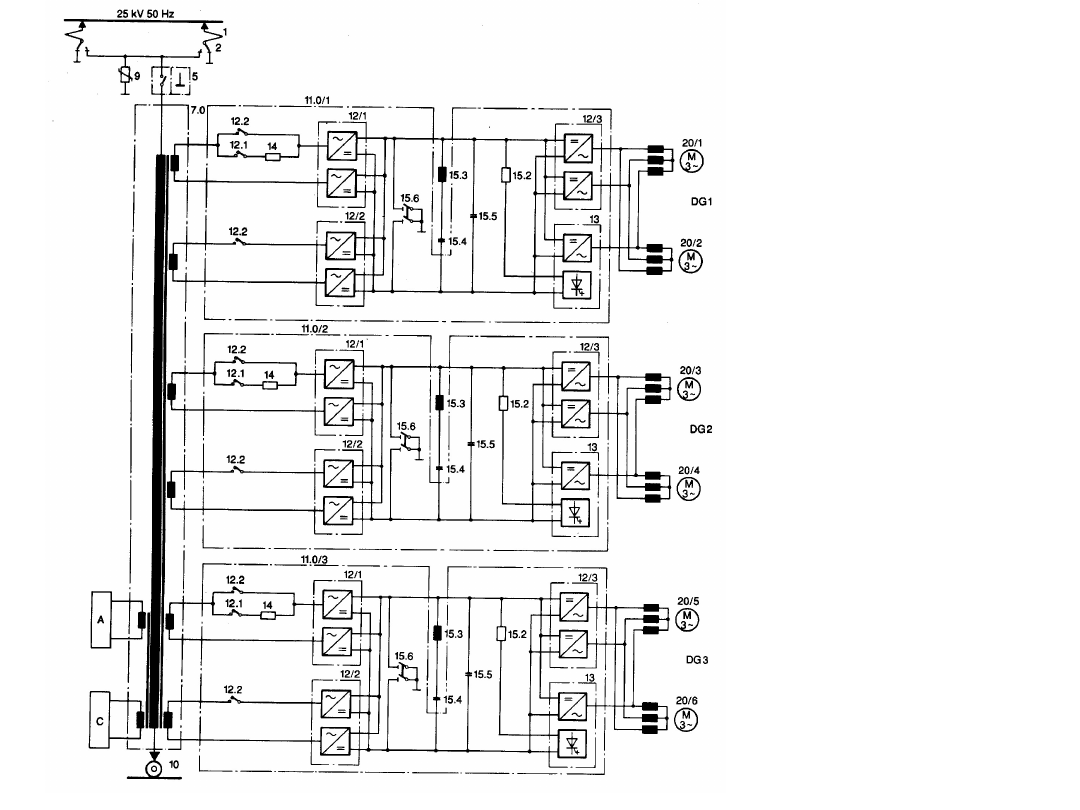
Obwód główny lokomotywy 2-systemowej: falowniki
trzypoziomowe zasilane bezpośrednio przy prądzie stałym,
a poprzez przekształtnik czterokwadrantowy – przy prądzie
przemiennym
Schemat obwodu głównego wagonu motorowego
Metropolis
Schemat ideowy obwodu głównego lokomotywy
EU43
Schemat
obwodu
głównego
lokomotywy
„Le Shuttle”
Schemat obwodu głównego lokomotywy serii 460 kolei
szwajcarskich
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
Wyszukiwarka
Podobne podstrony:
23 Sposoby regulacji predkosci obrotowej silnika bocznikowego pradu stalego
Układ automatycznej regulacji prędkości obrotowej silnika
Regulacja predkosci obrotowej silnika bocznikowego, I
Regulacja predkosci obrotowej silnika szeregowego, I
Układ automatycznej regulacji prędkości obrotowej silnika prądu stałego
Regulatory prędkości obrotowych silników i układów elektromechanicznych
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
Mikroprocesorowy – tranzystorowy regulator prędkości obrotowej DSS2 C
Regulacja prędkości kątowej silnika asn
regulacja prędkości obrotowej
@regulacja prędkosci, Sprawka, silniki
tyrystorowy regulator prędkości obrotowej
regulacja prędkości obrotowej, Automatyka
Regulacja prędkości obrotowej ze sprzężeniem, Automatyka
Czestotliwosciowa regulacja predkosci katowej silnika indukcyjnego
Układ automatycznej regulacji prędkości obrotowej
kierunkowe 6 rozruch i regulacja predkosci obrotowej
regulacja prędkości obrotowej
więcej podobnych podstron