Politechnika Śląska
w Gliwicach
Wydział Elektryczny
REGULACJA PRĘDKOŚCI OBROTOWEJ W UKŁADZIE ZE SPRZĘŻENIEM
ZWROTNYM OD ZAKŁÓCEŃ
SEKCJA V (EE)
Czaplok Krzysztof
Herka Dariusz
Kozieł Piotr
Wejs Jacek
WPROWADZENIE
Regulacja -jest to sterowanie w układzie zamkniętym , a wiec w układzie ze sprzężeniem zwrotnym.
Każdy układ regulacji automatycznej jednej zmiennej można przedstawić za pomocą schematu blokowego np.: Z
XO + ε U X
-
X
Podstawowymi członami układu regulacji są : obiekt regulacji oraz regulator. Podstawowymi sygnałami w układzie regulacji są natomiast: sygnał regulowany x ,sygnał wartości zadanej xo , sygnał uchybu ε oraz sygnał sterujący u , a także sygnał zakłócający z.
Rys.Zestaw urządzeń potrzebnych do budowy układu automatycznej regulacji
CEL ĆWICZENIA
Celem ćwiczenia jest dobór parametrów i zapoznanie się z układem stabilizacji prędkości obrotowej silnika prądu stałego w warunkach zmiennego obciążenia silnika.
Na badany układ składa się silnik i prądnica. Zmiana obciążenia mechanicznego silnika realizowana jest przez mechaniczne sprzęgnięcie silnika z prądnicą i zmianę prądu pobieranego z prądnicy. Prąd prądnicy traktujemy jako zakłócenie wpływające na wartość prędkości obrotowej silnika.
Regulacja od zakłóceń polega na uzyskaniu sygnału regulacji uzależnionego od prądu prądnicy,
a nie od wielkości regulowanej tj prędkośći obrotowej silnika.
Silnik zasilany jest ze wzmacniacza o regulowanym sygnale zadającym UZ i regulowanym k.
Prądnica obciążona jest rezystorem nastawnym . Spadek napięcia na rezystancji jest proporcjonalny do prądu obciążenia podawany jest na regulowany dzielnik napięcia.
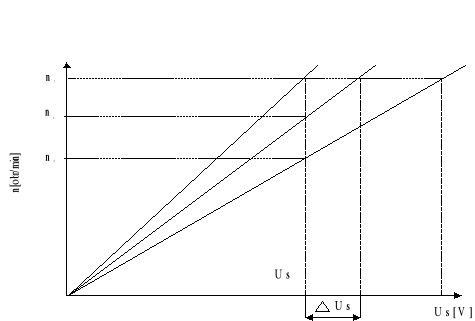
Napięcie na wyjściu wzmacniacza US = k(UZ + UO) podawane jest na silnik .
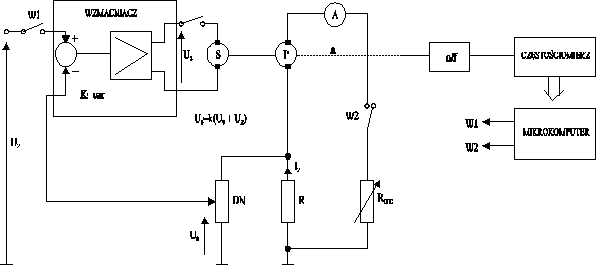
Rys. Podstawowy układ stanowiska pomiarowego
Schemat blokowy zamkniętego układu regulacji
X0(s) - transformata sygnału zadanego - regulowanego sygnału UZ
X(s) - transformata sygnału regulowanego - prędkości obrotowej silnika
E(s) - transformata uchybu regulacji
Y(s) - transformata sygnału nastawiającego
Z(s) - transformata sygnału zakłóceń
Gr(s) - transmitancja regulatora
Go(s) - transmitancja obiektu regulacji
Transmitancja układu otwartego:
![]()
Zależność ta jest prawdziwa gdy Z(t)=0 , a pętla sprzężenia zwrotnego zostanie przerwana.
Transmitancja układu zamkniętego:
![]()
![]()
Transmitancja uchybu: Transmitancja zakłóceniowa:
![]()
![]()
![]()
POMIARY
RN[Ω] |
- |
10 |
1000 |
UZ[V] |
3,96 |
4,08 |
4,02 |
n[obr/min] |
660 |
655 |
680 |
I1[A] |
1,03 |
1,11 |
1,05 |
URN[V] |
0,005 |
0,049 |
0,01 |
I2[mA] |
6 |
59 |
13 |
US[kV] |
3,96 |
4,08 |
4,02 |
kW |
1 |
1 |
1 |
n1=660
n2=655 R=10[Ω]
n3=680 R=1000[Ω]
U1=3,96 ![]()
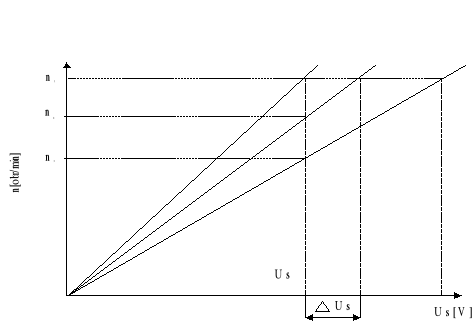
n1=aU2[obr/min]
![]()
![]()
TABELA POMIAROWA
|
WYKRES 1 |
WYKRES 2 |
WYKRES 3(obc.) |
WYKRES 4 |
WYKRES 5 |
WYKRES 6(obc.) |
WYKRES 7 |
WYKRES 8 |
Uz |
3,18 |
6 |
2,82 |
6 |
6 |
2,88 |
3 |
6 |
n |
420 |
1594 |
320 |
1325 |
950 |
390 |
112 |
564 |
I1 |
0,93 |
1,12 |
0,95 |
1,89 |
1,57 |
1,07 |
0,88 |
0,94 |
URN |
0,004 |
0,005 |
0,061 |
0,509 |
0,341 |
0,093 |
0,004 |
0,004 |
I2 |
5 |
6 |
80 |
622 |
404 |
110 |
6 |
5 |
US |
3,21 |
6,03 |
3,28 |
9,07 |
5,79 |
3,56 |
2,54 |
3,59 |
kW |
1 |
1 |
1 |
1 |
3 |
3 |
1 |
1 |
WNIOSKI
W ćwiczeniu zapoznaliśmy się z prostym układem regulacji w którym wielkość wyjściowa
i wejściowa są różnymi wielkościami fizycznymi, a funkcję regulatora pełni obiekt posiadający wzmocnienie statyczne. Na podstawie pomiarów wyznaczyliśmy parametry badanego obiektu przy obciążeniu maksymalnym i przy braku obciążenia. Zbadaliśmy wpływ nastaw układu sprzężenia zwrotnego na przebieg charakterystyki danego obiektu . W pętli ujemnego sprzężenia zwrotnego występuje element posiadający tylko wzmocnienie statyczne kr. Tylko przy ściśle określonej nastawie przebieg dochodził najszybciej do wartości ustalonej i odbywało się to bez zachwiań charakterystyki. Dla innych nastaw przebieg był zachwiany i wydłużony nie dochodząc do założonych obrotów. Z analizy stanów dynamicznych możemy wyciągnąć następujące wnioski :
Układ regulacji ze sprzężeniem zwrotnym od sygnału zakłóceń wolniej reaguje na zmianę wielkości zadanej niż układ ze sprzężeniem od wielkości wyjściowej. Wynika to z faktu, że wartość sygnału zakłócenia zależy od prędkości silnika, a więc jego wartość jest zdeterminowana stałą czasową silnika. W układzie ze sprzężeniem od wielości wyjściowej sygnał o różnicy prędkości jest uzyskiwany natychmiast przez co regulacja jest o wiele wydajniejsza.
Układ ze sprzężeniem od zakłóceń ma jednak pewne zalety ponieważ szybciej reaguje na zmianę obciążenia. Jest to spowodowane tym że układ reaguje właściwie na wartość zakłócenia (sygnał zakłócenia podany jest bezpośrednio na wejście wzmacniacza).
W układzie ze sprzężeniem od wielkości wyjściowej wiadomość o obciążeniu pojawia się dopiero po zmianie prędkości obrotowej, czyli jest ona zależna od prędkości reakcji silnika na obciążenie.
Doboru układu regulacji należy dokonywać znając specyfikę pracy obiektu. Rozważając teoretycznie możliwość zastosowania danego układu regulacji należałoby zbadać jak się on zachowa w sytuacji awaryjnej obiektu
W układzie z sygnałem sprzężenia od zakłóceń regulacja prędkości obrotowej silnika nie spełnia warunku utrzymania stałej prędkości.
![]()
OBJEKT
CZUJNIK
NADAJNIK WARTOŚCI
ZADANEJ
ELEMENT NASTAWCZY
SIŁOWNIK
PRZETWORNIK
POMIAROWY
CZŁON DYNAMICZNY
REGULATOR
URZĄDZENIE WYKONAWCZE
URZADZENIE POMIAROWE
X(s)
+![]()
Gr(s)
Rysunek . Ogólny schemat blokowy ukł. regulacji
REGULATOR
OBJEKT
X0(s)
Z(s)
Y(s)
-![]()
E(s)
G0(s)
Wyszukiwarka
Podobne podstrony:
Układ automatycznej regulacji prędkości obrotowej silnika
Regulacja prędkości obrotowej ze sprzężeniem, Automatyka
Układ automatycznej regulacji prędkości obrotowej silnika prądu stałego
Układ automatycznej regulacji prędkości obrotowej
Mikroprocesorowy – tranzystorowy regulator prędkości obrotowej DSS2 C
Wykład 5 Regulacja prędkości obrotowej silników trakcyjnych
Prędkośc obrotowa, Automatyka
regulacja prędkości obrotowej
23 Sposoby regulacji predkosci obrotowej silnika bocznikowego pradu stalego
tyrystorowy regulator prędkości obrotowej
Regulacja predkosci obrotowej silnika bocznikowego, I
Regulacja predkosci obrotowej silnika szeregowego, I
kierunkowe 6 rozruch i regulacja predkosci obrotowej
regulacja prędkości obrotowej
Regulatory prędkości obrotowej
regulacja prędkości obrotowej
Regulatory prędkości obrotowych silników i układów elektromechanicznych
BADANIE PRZETWORNIKÓW PRĘDKOŚCI OBROTOWEJ 2, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdani
więcej podobnych podstron