
1
Wykład 2
MECHANIKA TEORETYCZNA
Studia stacjonarne I stopnia – rok akademicki 2010/11
Autor:
Henryk Laskowski
Katedra Podstaw Mechaniki Ośrodków Ciągłych
Instytut Mechaniki Budowli
Wydział Inżynierii Lądowej

Część 1
MACIERZE I WYZNACZNIKI

3
1.1. Definicja macierzy
i , j
a
i
, ... ,m ,
j
, ... ,n
1
1
Ciąg dwuwskaźnikowy
skończony
,
,
,n
,
,
,n
m ,
m ,
m ,n
a
a
...
a
a
a
...
a
...
...
...
...
a
a
... a
A
11
1 2
1
2 1
2 2
2
1
2
i, m – numer wiersza, liczba wierszy
j, n – numer kolumny, liczba kolumn

4
Macierz zerowa
...
...
... ... ... ...
...
A
0
0
0
0
0
0
0
0
0
0
Macierz jednostkowa
i , j
...
...
δ
... ... ... ...
...
E
1
0
0
0
1
0
1
0
0
1
i , j
gdy i
j
δ
gdy i
j
1
0
gdzie:
- symbol Kroneckera

5
i , j
k ,l
m
p
n
q
a
b
gdy i
k
j
l
A
B
Równość macierzy
Macierz A jest równa macierzy B gdy obie macierze mają te same
wymiary oraz każdy wyraz macierzy A jest równy wyrazowi macierzy B
o tych samych wskaźnikach
i , j
k ,l
p ,q
m,n
a
b
A
B

6
Mnożenie macierzy przez liczbę
i , j
i , j
s
s
a
s a
A
Dodawanie i odejmowanie macierzy
i , j
i , j
i , j
i , j
a
b
a
b
A
B
i , j
i , j
i , j
i , j
a
b
a
b
A B
1.2. Działania na macierzach

7
Mnożenie macierzy przez macierz
i , j
j ,k
m ,n
n , p
a
b
A
B
Dane są macierze:
(liczba kolumn macierzy A jest równa liczbie wierszy macierzy B)
i ,k
m , p
c
C
AB
k
n
i ,k
i
in
ij
jk
j
nk
b
c
a
... a
...
a b
b
1
1
1
gdzie:
i ,k
c
- iloczyn i-tego wiersza macierzy A i k-tej kolumny macierzy B

8
Własności działań na macierzach
1. Mnożenie macierzy przez liczbę jest łączne i rozdzielne względem
dodawania liczb i dodawania macierzy
r
s
r s
A
A
r
s
r
s
A
A
A
s
s
s
A
B
A
B
2. Dodawanie macierzy jest przemienne i łączne
A
B
B
A
A
B
C
A
B C
3. Mnożenie macierzy przez macierz nie jest przemienne
A B
B A
4. Mnożenie macierzy przez macierz jest łączne i rozdzielne względem
dodawania macierzy
AB C
A BC
F G + H = FG + FH
G + H K = GK + HK

9
5. Dla każdej macierzy A i macierzy zerowej stosownego wymiaru
zachodzą związki:
A0
0
A
0
0
6. Dla każdej macierzy A i macierzy jednostkowej stosownego wymiaru
zachodzą związki:
AE
A
EA
A

10
Wyznacznik jest to funkcja przyporządkowująca każdej macierzy
kwadratowej M stopnia n wartość (oznaczaną detM), która spełnia
następujące własności:
1. Dla macierzy pierwszego stopnia M = [a]: detM = a
2. Dla macierzy n-tego stopnia M = [a
ij
]
nn
:
n
k
j
kj
k , j
k
det
a det
M
M
1
1
gdzie
i , j
M
jest macierzą n - 1 stopnia powstałą z macierzy M przez
wykreślenie i-tego wiersza i j-tej kolumny
n
i k
ik
i ,k
k
det
a det
M
M
1
1
(rozwinięcie względem
j-tej kolumny)
(rozwinięcie względem
i-tego wiersza)
1.3. Definicja wyznacznika

Część 2
WPROWADZENIE DO MECHANIKI
12
2.1. Ogólna klasyfikacja
MECHANIKA
– dział fizyki poświęcony badaniu ruchów i stanów
równowagi ciał. Obejmuje statykę, kinematykę
i dynamikę
Statyka
– dział mechaniki badający prawa równowagi
ciał będących pod działaniem sił
Kinematyka
– dział mechaniki zajmujący się opisem ruchu
ciał bez uwzględnienia jego przyczyn oraz
cech fizycznych ciał.
Dynamika
– dział mechaniki badający ruch ciał
materialnych pod wpływem działających
na nie sił

13
MECHANIKA BUDOWLI
Dział mechaniki stosowanej zajmujący się:
– wyznaczaniem sił i przemieszczeń w konstrukcjach budowlanych pod
wpływem ociążeń,
– określaniem wartości obciążeń bezpiecznych z punktu widzenia
nośności, sztywności i stateczności konstrukcji budowlanych,
– optymalnym kształtowaniem konstrukcji budowlanych.
Obejmuje m. in. teorię ustrojów prętowych (belek, kratownic, ram itp.)
oraz teorię dźwigarów powierzchniowych (płyt, powłok)
14
2.2. Trochę historii
Zasady "naukowego myślenia"
1. Wychodzenie z jak najmniejszej liczby założeń
pierwotnych, które znajduje się poprzez
myślenie indukcyjne.
2. Tworzenie w oparciu o te założenia ścisłej
teorii posługując się myśleniem dedukcyjnym,
3. Ostateczna weryfikację teorii poprzez
konfrontację wniosków z niej wynikających
z faktami.
Jeden z trzech, obok Platona i Sokratesa
największych filozofów greckich. Stworzył spójny
system filozoficzny, który bardzo silnie działał na
filozofię i naukę europejską.
Arystoteles, rze
ź
ba Lizypa - Luwr
Arystoteles (Ἀριστοτέλης) 384 p.n.e. - 324 p.n.e.)
15
Galileusz (Galileo Galilei) 1564 – 1642
Włoski astronom, astrolog, fizyk i filozof, twórca
podstaw nowożytnej fizyki. Chcąc uczynić przyro-
doznawstwo nauką ścisłą, położył nacisk na mate-
matyczną metodę wyrażania głoszonych twier-
dzeń; uważał, że podstawą badań przyrodniczych
powinny być tylko właściwości ciał, które można
mierzyć i wyrażać w języku matematycznym.
Stosował własną praktykę badawczą, w której
opierał się na faktach doświadczalnych, stosował
w szerokim zakresie metodę analizy i syntezy oraz
dążył do wprowadzenia metod eksperymen-
talnych i matematycznych w całej fizyce.
Odkrył zjawisko bezwładności. Dzięki doświadczeniom, Galileusz doszedł
do wniosku, że ciało, któremu w wyniku działania innych ciał nadano pewną
prędkość, powinno stale poruszać się ruchem jednostajnym prostoliniowym.
Badał wpływ tarcia na ruch ciał.
Galileo Galilei

16
Isaac Newton 1643 – 1727
Angielski fizyk, matematyk, astronom, filozof,
historyk, badacz Biblii i alchemik. Niezależnie od
Gottfrieda Leibniza przyczynił się do rozwoju
rachunku różniczkowego i całkowego.
Philosophiae Naturalis Principia Mathematica
(Matematyczne podstawy filozofii naturalnej,
bardziej znane dzisiaj jako
Principia), zostały
opublikowane w 1687. W dziele tym Newton
ogłosił trzy uniwersalne zasady dynamiki, które
nie zostały ulepszone aż do czasów Alberta
Einsteina. Użył łacińskiego słowa
gravitas
(ciężar) do nazwania siły, którą obecnie znamy
pod nazwą grawitacji i zdefiniował prawo
powszechnego ciążenia.
Sir Isaac Newton
17
Stefan Banach
Stefan Banach 1892 – 1945
Polski matematyk, jeden z czołowych przed-
stawicieli lwowskiej szkoły matematycznej.
Ugruntował ostatecznie podstawy niezwykle
istotnej w nowoczesnych zastosowaniach
matematyki analizy funkcjonalnej. Podał jej
fundamentalne twierdzenia, wprowadził jej
terminologię, którą zaakceptowali matematycy
na całym świecie. Był wytrawnym wykładowcą
i autorem ponad 60 prac naukowych a także
wielu podręczników matematycznych dla szkół
średnich.
Autor podręcznika akademickiego pt.
Mechanika, t.1 i 2,
wydawnictwo: Czytelnik, Spółdzielnia Wydawniczo –
Oświatowa, Kraków 1949 (wydanie 3 w czytelni PK).
18
2.3. Pojęcia podstawowe
Punkt materialny – model fizyczny ciała, którego jedynymi władnościami jest masa
i punkt jako położenie w przestrzeni
Ciało sztywne
– model fizyczny ciała o masie rozłożonej w pewnej przestrzeni,
której elementy nie mogą się względem siebie przemieszczać.
Punkt materialny jest szczególnym przypadkiem ciała sztywnego.
Układ materialny – skończony zbiór punktów materialnych lub ciał sztywnych
Układ odniesienia – rzeczywiste lub umowne ciało sztywne, względem którego
opisuje się ruch ciała sztywnego. Z układem odniesienia jest
związany układ współrzędnych
Ośrodek ciągły
– model fizyczny ciała o masie rozłożonej w pewnej przestrzeni,
której elementy mogą się względem siebie przemieszczać.
19
Siła
– wielkoć wektorowa będąca miarą oddziaływań fizycznych pomiędzy ciałami
powodujących ruch tych ciał lub utrzymujących je w stanie równowagi
a) aby można było mówić o sile muszą być co najmniej dwa ciała
(w koncepcji Einsteina do definicji siły wystarczy jedno ciało)
b) działanie ciał na siebie może być kontaktowe lub na odległość
c) każdej sile „towarzyszy” inna siła (akcja i reakcja - III zasada
dynamiki)
d) drugie prawo Newtona nie jest definicją siły, lecz wiąże ze sobą trzy
wielkości fizyczne: siłę, masę i przyspieszenie zależnością: F = ma,
gdzie: F
–
siła, m – masa, a – przyspieszenie punktu materialnego
Uwagi:
20
Masa
– skalarna wielkość fizyczna będąca miarą bezwładności ciała w jego ruchu
postępowym. Może być określona przez iloraz miary ciężaru do miary
przyspieszenia ziemskiego
Q
g
0
g
Q
m
df
Pęd punktu materialnego
– wektorowa wielkość fizyczna charakterysująca ruch
punktu materialnego, wyrażająca się iloczynem jego
masy i prędkości
v
m
p
df
m
v
21
2.4. Aksjomaty mechaniki (1687)
1. Aksjomat bezwładności – istnieją układy
odniesienia, w których, jeżeli na punkt
materialny nie działa żadna siła, to pęd punktu
nie ulega zmianie.
_______
const
p
v
m
p
0
2. Aksjomat ruchu – istnieją układy odniesienia,
w których, jeżeli na punkt materialny działa
siła, to zmienia jego pęd według prawa
F
p
t
3. Aksjomat wzajemnego oddziaływania (prawo
akcji i reakcji) – dwa punkty materialne
oddziałują na siebie zawsze siłami
przeciwnymi, działającymi wzdłuż jednej
prostej.
22
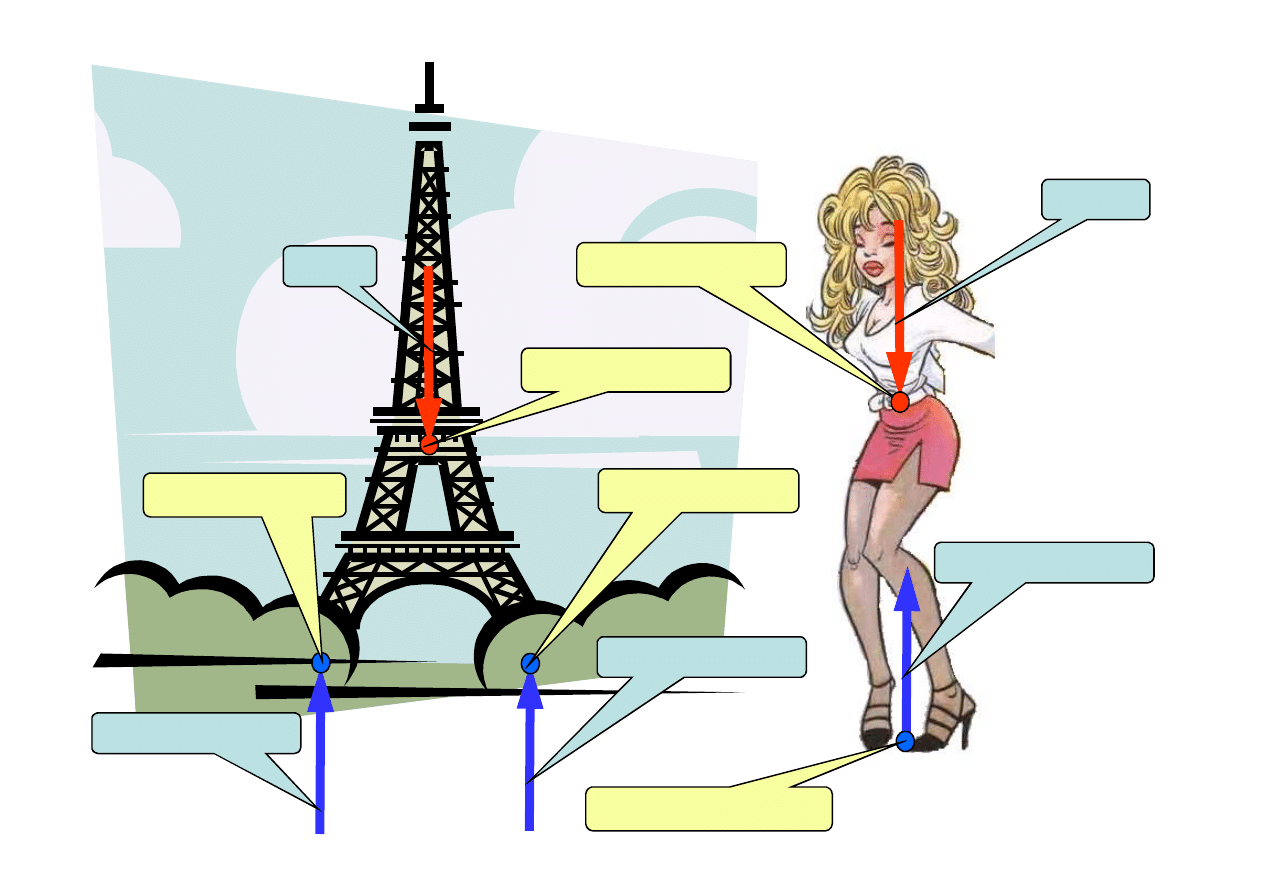
środek ciężkości
ciężar
reakcja podłoża
środek podparcia
Punkt podparcia
reakcja podłoża
środek ciężkości
ciężar
Punkt podparcia
reakcja podłoża
Wyszukiwarka
Podobne podstrony:
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
MT st w 06 [tryb zgodności]
MT st w 041 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodno┼Ťci]
MT st w 11 [tryb zgodno┼Ťci]
1 ST PiS [tryb zgodnosci]
Chemia Jadrowa 02 [tryb zgodnosci]
MT st w 04 cz1 [tryb zgodności]
MT st w 04 cz2 [tryb zgodności]
więcej podobnych podstron