Katedra Metrologii, Elektroniki i Automatyki
Laboratorium z Podstaw Automatyki i Sterowania
Regulacja z regulatorem PID.
dr inż. Jan Leks
KSS, sekcja VI
Adam Czuwaj
Małgorzata Dobiosz
Piotr Legutko
Cel ćwiczenia :
1.Wprowadzenie:
Regulator PID - przetwarza sygnał wejściowy ε(t) według trzech realizowanych równolegle operacji dynamicznych:
- wzmocnienia proporcjonalnego ze współczynnikiem kr ,
- różniczkowania ze współczynnikiem krTd , (Td czas wyprzedzenia),
- całkowania ze współczynnikiem kr/Ti , (Ti czas zdwojenia),
Transmitancja idealnego regulatora PID ma następującą postać:
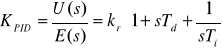
Rys.1.Schemat strukturalny regulatora typu PID
Td czas wyprzedzenia - określa intensywność działania układu różniczkującego. Dzięki działaniu różniczkującemu regulator może bardzo silnie reagować nawet na niewielkie , lecz szybkie zmiany uchybu ε.
Ti czas zdwojenia - określa intensywność działania całkującego.
2.Przebieg ćwiczenia:
a)wyznaczenie odpowiedzi na zadany impuls jednostkowy
tryb pracy ręcznej
Rys.1. Impuls zadany
Rys.2. Odpowiedz regulatora PID
b) Wyznaczenie odpowiedz na zadany skok jednostkowy w celu zbadania statyczności obiektu:
U[%]=50
Rys.3. Skok zadany
-Obiekt jest statyczny ponieważ odpowiedź skokowa osiąga wartość ustaloną:
-Wyznaczenie parametrów obiektu na podstawie wykresu odpowiedzi skokowej:
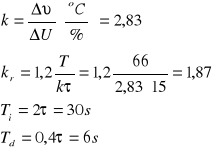
ΔU=50%
Δυ=187°C
T=66s
τ =15s
Użyte wzory dla dopuszczalnego przeregulowania Δy = 20%:
c) Dokonanie pomiarów dla wyliczonych przez nas parametrów regulatora PID:
praca automatyczna
Rys.4. Odpowiedz obiektu przy dopuszczalnych przeregulowaniu Δy = 20%
Rys.5. Odpowiedz obiektu przy dopuszczalnych przeregulowaniu Δy = 20% wraz z dodatkowym odbiornikiem ciepła.
d) Wyznaczenie parametrów obiektu na podstawie wykresu odpowiedzi skokowej:
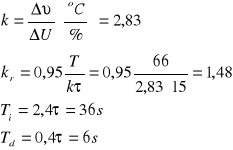
ΔU=50%
Δυ=187°C
T=66s
τ =15s
Użyte wzory dla dopuszczalnego przeregulowania Δy = 0%:
Rys.4. Odpowiedz obiektu przy dopuszczalnych przeregulowaniu Δy = 0%
3.Wnioski:
Z przeprowadzonych pomiarów wynika, że dla skoku jednostkowego (wykres 1) z którego wyznaczamy parametry nastaw regulatora, wzrost temperatury na grocie nie następuje gwałtownie, lecz łagodnie. Wykres 2 przedstawia odpowiedz układu po ustawieniu nastaw , odbiega on znacznie od wykresu 1. Ćwiczenie przeprowadzaliśmy dla dwóch stanów pracy. Ścisłej regulacji i regulacji z dopuszczalnym 20 % błędem.. W oby dwóch przypadkach możemy stwierdzić, że układ zachowuje swoje właściwości i potrafi Płynnie sterować zadanymi wielkościami.
Przy wprowadzeniu ochładzania zewnętrznego układ przeciwdziała tej sytuacji. Gdy następuje zmiana Temperatury zadanej również układ potrafi dokonać płynnej i jak najszybszej zmiany.
Ogólnie działanie całkujące ( odpowiada wzmocnieniu sygnałów wolnozmiennych i dużemu wzmocnieniu statycznemu) ujawnia się głównie w narastających częściach ch-styk, działanie różniczkujące sprawia, że regulator reaguje na zmiany odchyłki, a dokładniej na kierunek i szybkość tych zmian.
Wyszukiwarka
Podobne podstrony:
SURDOPED nasze
Nasze opracowanie pytań 1 40
nasze forum 1 2 [2005] hipoterapia i dogoterapia
JONY UJEMNE A NASZE ZDROWIE
1 PM PPASPA Pid 9555 Nieznany (2)
nasze forum 3 4 [2003] Metoda Ruchu Rozwijającego Weroniki Sherborne
przyroda kl IV poznajemy nasze otoczenie 1, KLASA 4
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
LEKI WPLYWAJACE NA KRZEPNIECIE I HEMOSTAZE, 000-Nasze Zdrowko, Leki i Witaminy
'nasze' sprawko z przetwornikow II rzedu
MECHANIKA NASZE POPRAWIONE!!!
nasze gotowiec
okulistyka pytania nasze
Lab 1 nasze
~lock PID
więcej podobnych podstron