WOJSKOWA AKADEMIA TECHNICZNA
Laboratorium z przedmiotu:
Wprowadzenie do Automatyki
SPRAWOZDANIE:
Modelowanie obiektu sterowania w środowisku MATLAB-SIMULINK
Wykonawca:
Karol Sosnowski I7X3S1
Prowadzący:
Mgr inż. Małgorzata
Rudnicka - Schmidt
Warszawa
20.01.2009
Treść zadania:
Badany jest układ dwóch zbiorników wody ze swobodnym przepływem. Oznaczymy: ![]()
- poziom wody w i-tym zbiorniku, ![]()
- pole powierzchni lustra wody i-tego zbiornika, gdzie i=1,2. Strumień wody q(t) wpływający do pierwszego zbiornika stanowi wymuszenie - może być kształtowany dowolnie przez obserwatora układu. Badany układ należy zamodelować w środowisku SIMULINK. SIMULINK jest interaktywnym pakietem zintegrowanym z MATLABem, przeznaczonym do modelowania, symulacji i analizy układów.
Dane:
Pole powierzchni lustra wody 1 zbiornika: C1=8
Pole powierzchni lustra wody 2 zbiornika: C2=5
Współczynnik przepływu wody z 1 zbiornika: mi1=1
Współczynnik przepływu wody z 2 zbiornika: mi2=2
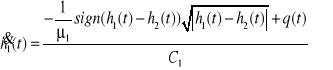
Obliczenia parametrów modelu:

Schemat układu:
Schemat układu w SIMULINKu:
Wykres sygnału wejściowego i odpowiedzi skokowych:
Wspólny wykres sygnału wejściowego i odpowiedzi skokowych przy zmiennym współczynniku przepływu wody (mi1) :
Na powyższym rysunku mamy wykresy sygnału wejściowego i 4 odpowiedzi skokowych badanych przy różnym współczynniku przepływu wody (mi1). Można zauważyć prostą zależność: Im mniejszy współczynnik przepływu wody tym wykres jest bardziej wypukły. Dla mi1=0,5 wykres jest bardzo wypukły. Dla mi1=1 wykres nie wiele się różni od wykresu z współczynnikiem mi1=0,5. Dla mi1=2 wykres jest mniej wypukły niż w poprzednich przypadkach. Dla mi1=5 wykres nie jest praktycznie w ogóle wypukły i jest niemalże linią prostą .
Wspólny wykres sygnału wejściowego i odpowiedzi skokowych przy zmiennym współczynniku przepływu wody (mi2) :
Na powyższym rysunku mamy wykresy sygnału wejściowego i 4 odpowiedzi skokowych badanych przy różnym współczynniku przepływu wody (mi2). I znowu wnioskując z obserwacji nasuwa się prosta zależność: Im mniejszy współczynnik mi2 tym wykres jest bardziej pochylony do osi czasu. Najbardziej pochylony wykres występuje dla mi2=0,5. Dla mi2=1 wykres jest nieco wyżej i oscyluje wokół wartości 1. Dla mi2=2 wykres odpowiedzi jest już dużo mniej pochylony do osi czasu, dopiero po określonym czasie staję się do niej równoległy. Dla mi2=4 wykres bardzo powoli pochyla się do osi czasu i potrzeba bardzo dużo czasu by stał się do niej równoległy.
Wnioski:
Ćwiczenia laboratoryjne nr 6 z przedmiotu Wprowadzenie do Automatyki miały na celu zapoznanie studenta ze środowiskiem MATLAB-SIMULINK i pokazanie na jakiej zasadzie modeluje się w nim układy sterowania. Przy wykonywaniu ćwiczenia nie miałem większych problemów. Gdy dostaliśmy nasze dane od prowadzącej ćwiczenia mieliśmy za zadanie wyliczenie wzorów na pochodne funkcji h1(t) i h2(t). Potrzebne były one do zaprojektowania układu w środowisku MATLAB-SIMULINK. Gdy już wyliczyliśmy potrzebne parametry, zabraliśmy się za modelowanie układu. Musieliśmy doprowadzić do wyjścia układu następujące sygnały: sygnał wejściowy i funkcje h1(t) i h2(t). Żeby otrzymać te funkcję musieliśmy scałkować pochodne funkcji h1(t) i h2(t) na które wyprowadziliśmy wzory na początku ćwiczenia. Całkowania dokonaliśmy poprzez blok Integrator w pakiecie SIMULINK. Po poprawnym zbudowaniu modelu układu pozostało nam wyświetlenie wyników. W przypadku gdzie na jednym wykresie chcieliśmy wyświetlić wykresy przy różnych współczynnikach trzeba było posłużyć się funkcją `plot'. Wykresy zostały omówione i przeanalizowane. Myślę, że cel ćwiczenia został osiągnięty i wyniki są zadowalające.
Wyszukiwarka
Podobne podstrony:
Wda lab1 sprawko, WAT, SEMESTR II, WDA
wda sprawko 3, WAT, SEMESTR II, WDA
wda3 sprawko, WAT, SEMESTR II, WDA
wda sprawko nr4, WAT, SEMESTR II, WDA
wda sprawko lab5 wooka, WAT, SEMESTR II, WDA
PA lab cw4, WAT, SEMESTR II, WDA, Wstep do Automatyki-matlab, mathlab
WDA Lab3 Sprawko, WAT, semestr III, Wprowadzenie do automatyki
wda trojan lab8, WAT, SEMESTR II, WDA
WDA 2, WAT, SEMESTR II, WDA
WDA Lab2 Sprawko, WAT, semestr III, Wprowadzenie do automatyki
rozwiazania, WAT, SEMESTR II, WDA
PA lab cw3, WAT, SEMESTR II, WDA, Wstep do Automatyki-matlab, mathlab
WDA sprawozdanie1, WAT, SEMESTR II, WDA
WDA Lab 6, WAT, SEMESTR II, WDA
wda trojan lab6, WAT, SEMESTR II, WDA
Lab 5, WAT, SEMESTR II, WDA
wda trojan lab5, WAT, SEMESTR II, WDA
PTK cw4, WAT, SEMESTR II, PTK
algorytmy lista dwukierunkowa, WAT, SEMESTR II, ALS
więcej podobnych podstron