w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
44
o c h r o n a o d z w a r ć i p r z e c i ą ż e ń
P
oczątkowy prąd zwarciowy silnika
I
kM
"
(grupy silników) jest w przy-
bliżeniu równy jego prądowi rozrucho-
wemu I
r
(sumie prądów rozruchowych
I
ri
i
n
=
∑
1
) przy rozruchu bezpośrednim.
Jeżeli wartość tego prądu przekracza
5% wartości prądu zwarciowego obli-
czonego dla konkretnego obwodu zwar-
ciowego, w sąsiedztwie którego jest za-
instalowany silnik lub grupa silników,
należy uwzględnić udział silników jako
dodatkowe źródło zasilające zwarcie.
Silnik elektryczny, w pobliżu któ-
rego występuje zwarcie, przestaje być
zasilany energią elektryczną z sieci.
Kosztem zgromadzonej energii kine-
tycznej oraz magnetycznej przechodzi
z pracy silnikowej do pracy generato-
rowej, co symbolicznie zostało przed-
stawione na
rysunku 1.
W układach napędowych prądu
przemiennego powszechnie stoso-
wane są silniki indukcyjne, a w nie-
których przypadkach silniki synchro-
niczne. Silnik synchroniczny w czasie
wybiegu zachowuje się jak generator
i tak powinien być traktowany w ob-
liczeniach zwarciowych [1].
Natomiast silnik indukcyjny, któ-
ry nie posiada stałego wzbudzenia,
zasila zwarcie przez od 2 do 5 okre-
sów. Na skutek silnego tłumienia
składowa okresowa szybko znika
do zera.
Jego impedancja wyraża się wzorem:
Z
k
U
S
U
k P
M
nM
nM
nM
nM
= ⋅
=
⋅ ⋅
⋅
1
2
2
η
ϕ
cos
gdzie:
k
I
I
r
nM
=
– krotność prądu rozrucho-
wego,
I
P
U
n
nM
nM
=
⋅
⋅
⋅
3
cos
ϕ η
– prąd zna-
mionowy w [A],
I
r
= k·I
nM
– prąd rozruchowy silni-
ka w [A],
P
nM
– moc czynna znamionowa sil-
nika [W],
U
nM
– napięcie znamionowe silnika
w [V],
Z
M
– impedancja silnika w [W],
S
nM
– moc pozorna silnika w [VA],
η – sprawność silnika w [-],
cosϕ – współczynnik mocy biernej [-],
I
S
U
S
U
nM
nM
nM
nM
nM
=
⋅
=
⋅
⋅
⋅
3
3
cos
ϕ η
– prąd znamionowy silnika.
Prąd zwarciowy początkowy przy
zwarciu trójfazowym na zaciskach sil-
nika oblicza się ze wzoru:
I
c
U
Z
kM
nM
M
"
max
=
⋅
⋅
3
Jeżeli pomiędzy silnikiem o impe-
dancji zwarciowej Z
M
a miejscem zwar-
cia występuje znaczna impedancja linii
i / lub transformatora, to prąd początko-
wy należy zmniejszyć do wartości:
(
)
:
"
'
"
I
I
k
gdzie
k
t
Z
Z
Z
Z
kM
t
kM
M
M
T
L
=
⋅
=
+
+
gdzie:
(
)
:
"
'
"
I
I
k
gdzie
k
t
Z
Z
Z
Z
kM
t
kM
M
M
T
L
=
⋅
=
+
+
– współczynnik tłumienia.
Z
M
– impedancja silnika w [W],
Z
T
– impedancja transformatora w [W],
Z
L
– impedancja linii w [W].
W celu wyznaczenia prądu uda-
rowego silnika zasilającego zwarcie,
wprowadza się fikcyjny współczyn-
nik χ
M
= 1,3 [1] co powoduje, że
wzór na prąd udarowy silnika przyj-
muje postać:
i
I
I
pM
M
kM
kM
=
⋅
⋅
=
⋅
χ
2
1 84
"
"
,
Podobnie jak przy prądzie począt-
kowym zwarcia, gdy pomiędzy miej-
scem zwarcia występuje znaczna im-
pedancja linii i / lub transformatora,
prąd udarowy ulega zredukowaniu:
(
)
'
i
i k
pM
p
= ⋅
Udział silnika w prądzie zwarcio-
wym niesymetrycznym uwzględnia
się, obliczając składową okresową i
AC
oraz składową nieokresową i
DC.
Całkowity początkowy prąd zwar-
ciowy I"
kc
jest sumą pradów I"
kQ
oraz
I"
kM
czyli I"
kc
= I"
kQ
+I"
kM
. Podobnie
prąd udarowy i
pc
=i
pa
+i
pM
. Natomiast
prąd niesymetryczny można wyrazić
Często w instalacjach przemysłowych występują grupy silników indukcyjnych o dużych mo-
cach znamionowych. W opracowaniach praktycznych nagminnie pomijany jest ich wpływ
na wartość prądu zwarciowego. Dostępna na rynku księgarskim literatura wyjaśnia ten te-
mat tylko pobieżnie. W niniejszym artykule zostały przedstawione zasady obliczeń zwar-
ciowych z udziałem silników indukcyjnych, które niejednokrotnie przy zasilaniu zasilają
prąd zwarcia dużym prądem. Prądem, który powstaje wskutek przejścia silnika do pracy
generatorowej przy zwarciu w pobliskim odbiorniku zasilanym ze wspólnej rozdzielnicy.
Rys. 1 Silnik jako dodatkowe źródło
zasilające zwarcie
Odb.
M2
M1
I
I
I
S''
k
Q
15 kV
3x230/400 V
TR 15/0,4 kV
kM
2
kM
1
kQ
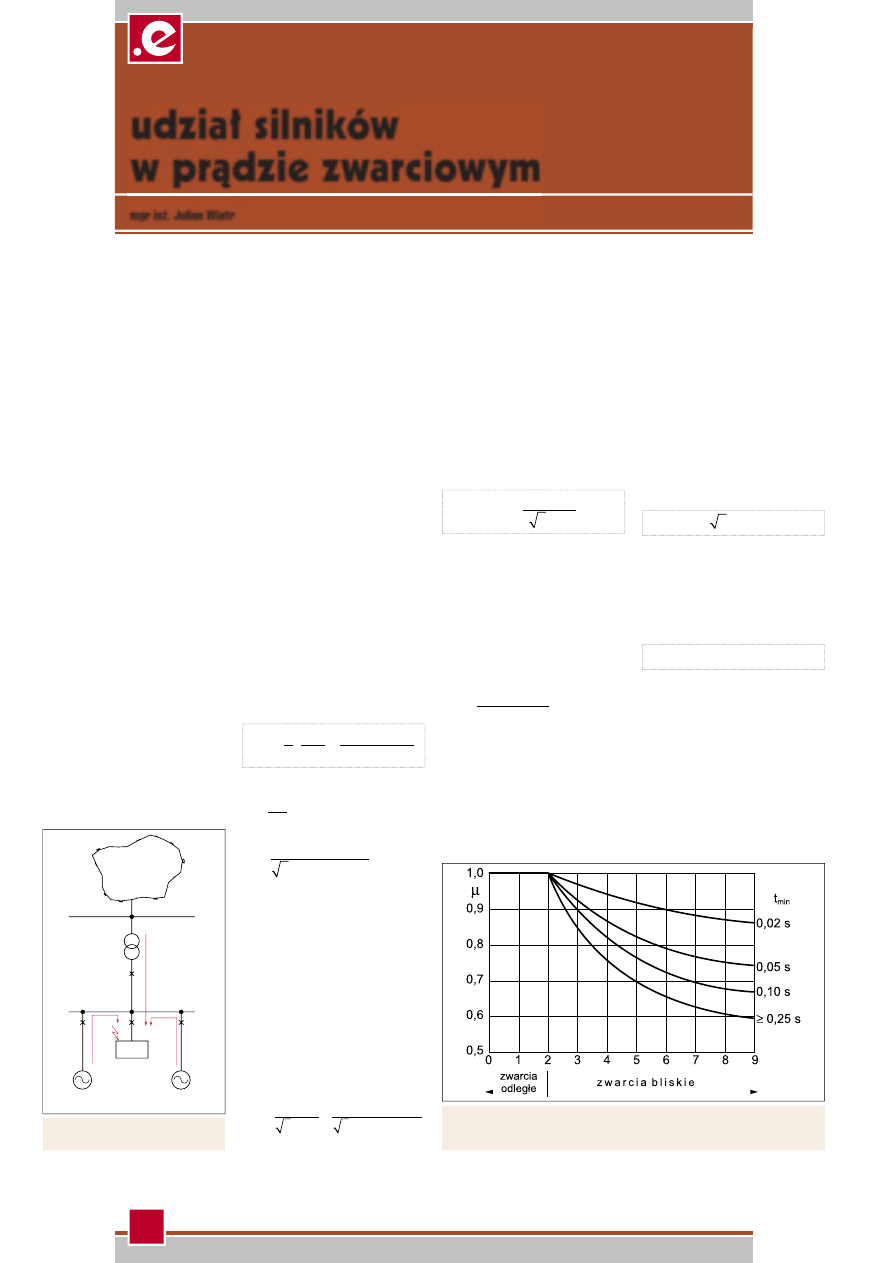
Rys. 2 Współczynnik
µ
do obliczania prądu zwarciowego wyłączeniowego syme-
trycznego generatorów i silników (dla wartości pośrednich t
min
należy stoso-
wać interpolację) [1]
udział silników
w prądzie zwarciowym
mgr inż. Julian Wiatr
w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
45
i
pQ
– prąd udarowy przy zasilaniu
z sieci,
R
kT
– rezystancja zwarciowa trans-
formatora,
X
kT
– reaktancja zwarciowa transfor-
matora,
R
kQ
– reaktancja SEE,
X
kQ
– reaktancja SEE,
ω = 2πf – pulsacja.
I
ka"
– początkowy prąd zwarcia przy
zasilaniu z sieci.
b) silniki załączone
następującym wzorem przedstawio-
nym powyżej.
µ – współczynnik odczytany z ry-
sunku 2,
t
min
– czas własny otwierania wyłącz-
nika (zapłonu łuku w bezpieczniku).
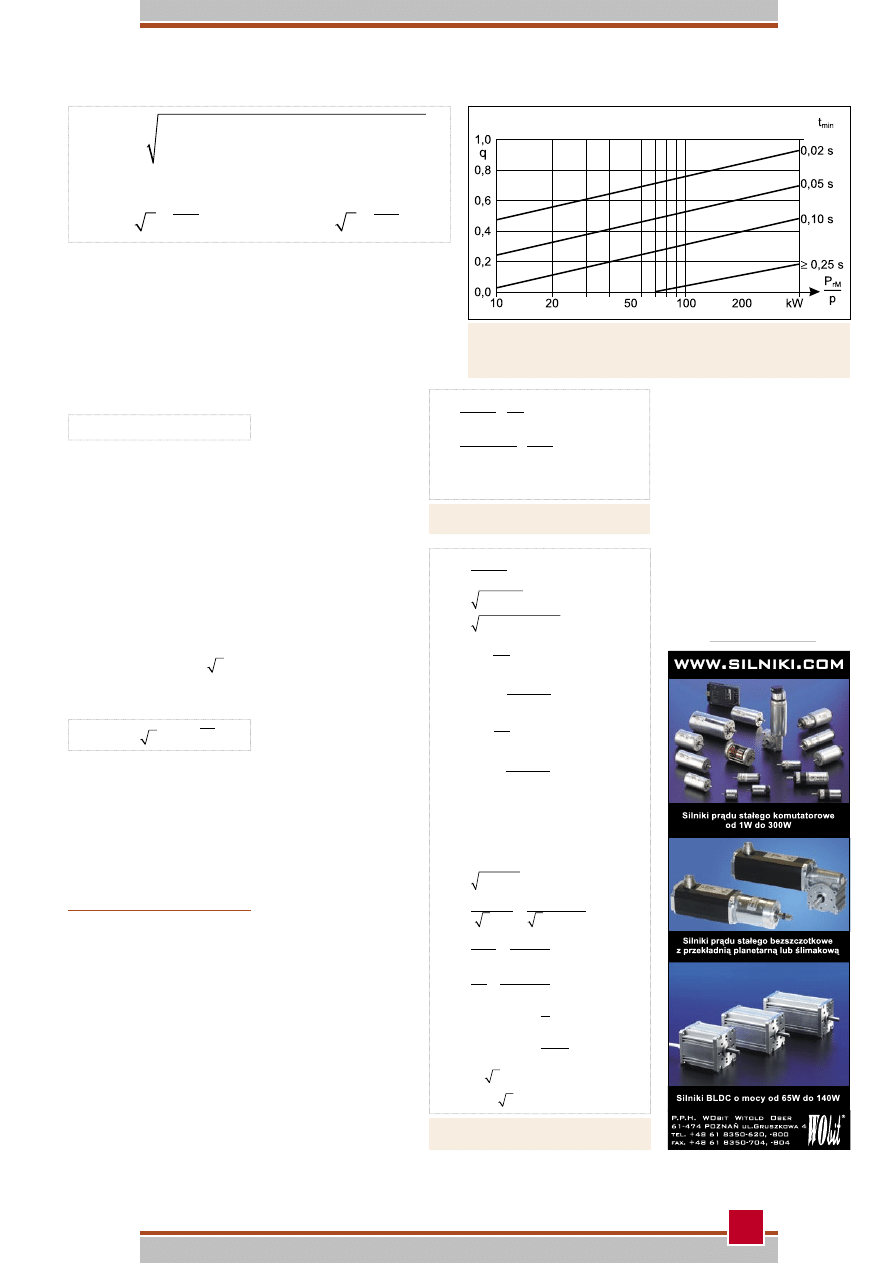
Prąd wyłączalny symetryczny sil-
nika indukcyjnego wynosi:
I
q
I
bM
kM
= ⋅ ⋅
µ
"
gdzie:
q – współczynnik zależny od mocy sil-
nika przypadającej na parę biegunów
P
p
rM
/ odczytamy z
rysunku 3 (jest
to współczynnik uwzględniający do-
datkowy czynnik tłumiący składową
nieokresową wynikający z fizyki dzia-
łania silnika w stanie wybiegu).
W czasie zwarcia na zaciskach sil-
nika składowa nieokresowa prądu
zwarciowego ma w chwili początko-
wej wartość nie większą niż 2
⋅I
kM
"
,
a w chwili t
min
posiada wartość nie
większą niż:
i
I
e
DCM
kM
t
T
DC
=
⋅
⋅
−
2
"
min
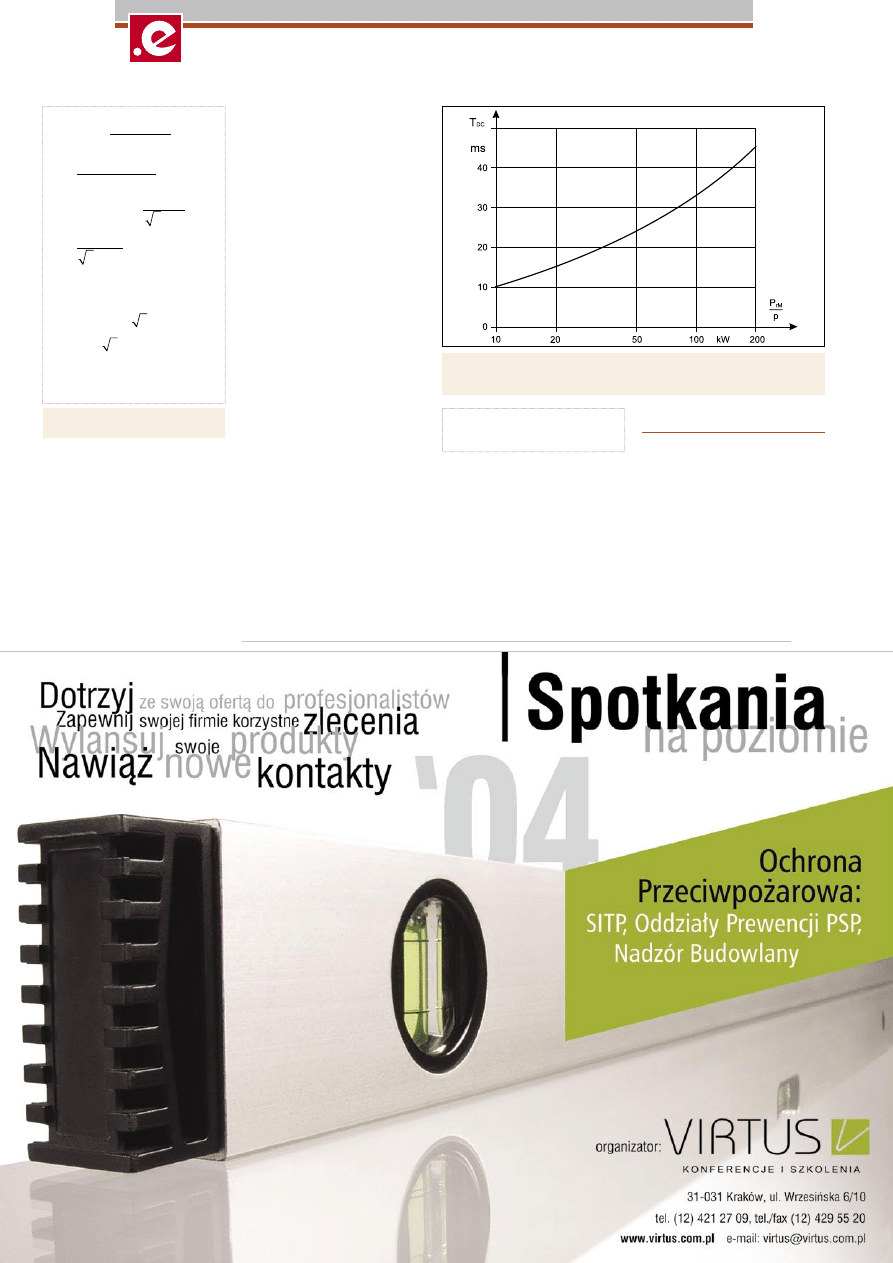
Przebieg zależności stałej czaso-
wej znikania składowej nieokreso-
wej (T
DC
) na zaciskach silnika induk-
cyjnego w zależności od mocy silnika
indukcyjnego przypadającej na parę
biegunów przedstawia
rysunek 4.
przykład rachunkowy
S”
kQ
= 250 MVA moc zwarciowa syste-
mu elektroenergetycznego 15 / 0,4 kV.
transformator zasilający
S
rT
= 250 kVA; u
Kr
= 0,045;
∆P
obczn
= 4,5 kW.
silniki indukcyjne
P
nM1
= P
nM2
= 30 kW; cosϕ = 0,9;
η = 0,9, k = 6; U
nm
= 3×230 / 400 V;
Obliczyć początkowy prąd zwarcia
trójfazowego
′′
I
kQ
oraz prąd udarowy
i
P
dla dwóch przypadków:
a) silniki M1 i M2 – odłączone,
b) silniki M1 i M2 – załączone.
U
nT1
– napięcie znamionowe strony
pierwotnej transformatora,
U
nT2
– napięcie znamionowe strony
wtórnej transformatora,
S
rT
– moc pozorna znamionowa trans-
formatora,
P
nM
– moc czynna znamiono-
wa silnika,
η – sprawność silnika,
cosϕ – współczynnik mocy
biernej silnika,
u
Kr
– napięcie zwarcia trans-
formatora w jednostkach
względnych,
k – krotność prądu rozruchu
silnika,
∆P
obczn
– znamionowa moc czyn-
na strat transformatora,
S”
kQ
– moc zwarciowa sys-
temu elektroenergetyczne-
go w punkcie przyłączenia
transformatora do linii o na-
pięciu 15 kV.
a) silniki odłączone
- parametry zwarciowe sys-
temu elektroenergetycz-
nego przedstawiają
wzory
A1,
- parametry zwarciowe trans-
formatora przedstawiają
wzory A2, gdzie:
U
n1
– napięcie znamionowe
sieci zasilającej transforma-
tor,
U
rT1
– napięcie górne transfor-
matora,
U
rT2
= 420 V – napięcie dolne
transformatora,
T – stała czasowa obwodu
zwarciowego,
I”
kQ
– początkowy prąd zwar-
cia przy zasilaniu z sieci elek-
troenergetycznej,
Z
k
– impedancja obwodu
zwarcia,
χ – współczynnik udaru,
I
I
I
i
i
I
basym
bi
i
n
bMi
i
n
DCi
i
n
DCMi
i
n
bMi
=
+
+
+
=
=
=
=
=
∑ ∑
∑
∑
(
)
(
)
1
1
2
1
1
2
µII
I
I
i
e
I
i
e
I
kMi
bMi
K
DCi
t
T
kM
DCMi
t
T
kM
"
"
min
min
= ⋅
=
⋅
⋅ ′′
=
⋅
⋅ ′′
−
−
µ
2
2
reklama
Z
c
U
S
U
U
kQ
n
kQ
nT
nT
=
⋅
⋅
=
=
⋅
⋅
⋅
max
//
,
(
)
1
2
1
2
2
2
6
110 15000
250 10
4220
15000
0 000776
0 995
0 995 0 000776 0 00
2
=
=
⋅
=
⋅
=
,
,
,
,
,
Ω
X
Z
kQ
kQ
00772
0 1
0 1 0 000772 0 000772
Ω
Ω
R
X
kQ
kQ
=
⋅
=
⋅
=
,
,
,
,
Wzory A1 Parametry zwarciowe systemu
elektroenergetycznego
u
P
S
u
Xr
obc zn
rT
Xr
=
=
+
=
=
−
≅
=
⋅
∆
u
u
R
u
u
kr
Rr
kT
Rr
2
2
2
2
0 045
0 018
0 041
,
,
,
rrT
rT
kT
Xr
rT
rT
S
X
u
u
S
2
2
3
2
0 018
420
250 10
0 0127
0 041
4
=
=
⋅
⋅
=
=
⋅
=
=
⋅
,
,
,
Ω
220
250 10
0 0289
0 000772 0 0289 0 029672
2
3
⋅
=
=
+
=
=
+
=
,
,
,
,
Ω
Ω
X
X
X
R
k
kQ
kT
k
==
+
=
=
+
=
=
+
=
R
R
Z
R
X
I
kQ
kT
K
k
k
kQ
0 000077 0 0127 0 012777
0 0323
2
2
,
,
,
,
/
Ω
Ω
//
max
,
,
,
,
,
=
⋅
⋅
=
⋅
⋅
≅
=
=
⋅ ⋅
≅
c
U
Z
kA
T
tg
n
k
k
3
1 0 400
3 0 0323
7 15
2 32
2
50
7
ϕ
ω
π
44
0 029672
0 012777
2 32
1 02 0 98
1 02
3
ms
tg
X
R
e
k
k
R
X
k
k
ϕ
χ
=
=
≅
=
+
=
=
−
,
,
,
,
,
,
++
≅
= ⋅
⋅
=
=
⋅
⋅
≅
−
0 98
1 29
2
1 29
2 7 15 13
3
0 01277
0 029672
,
,
,
,
,
,
//
e
i
I
pQ
kQ
χ
,,044kA
Wzory A2 Parametry zwarciowe transfor-
matora
Rys. 3 Współczynnik q obrazujący znikanie prądu zwarciowego okresowego silnika
indukcyjnego z powodu znikania prądu wirnika w zależności od mocy silnika
przypadającej na parę biegunów (dla wartości pośrednich t
min
należy stoso-
wać interpolację) [1] (P
rn
=P
nM
)
w w w. e l e k t r o . i n f o . p l
n r 1 0 / 2 0 0 4
46
o c h r o n a o d z w a r ć i p r z e c i ą ż e ń
I
I
ri
kQ
i
n
≥
⋅
=
∑
0 05
1
,
"
gdzie:
I
ri
– prąd rozruchowy i-tego silnika
w grupie,
I''
kQ
– początkowy prąd zwarcia zasila-
nego przez źródło podstawowe (system
elektroenergetyczny lub generator),
I
ri
– prąd rozruchowy grupy silników
(lub silnika, gdy n = 1).
literatura
1. E. Musiał, Prądy zwarciowe w ni-
skonapięciowych instalacjach
i urządzeniach prądu przemien-
nego, INPE, nr 40 2001.
2. H. Markiewicz, Instalacje elek-
tryczne, WMT 2003.
3. P. Kacejko, J. Machowski, Zwarcia
w systemach elektroenergetycz-
nych, WMT 2003.
Parametry dla silnika załączonego
przedstawiają
wzory B1, gdzie:
i
pM
– prąd udarowy od silnika będą-
cego w stanie wybiegu,
U
nM
– napięcie znamionowe silnika,
k – krotność prądu rozruchowego,
Z
M
– impedancja silnika indukcyjnego,
I’’
kM
– prąd zwarciowy płynący od sil-
nika będącego w stanie wybiegu,
c
max
– współczynnik korekcyjny,
i
pc
– całkowity udarowy prąd zwar-
ciowy,
I’’
kC
– całkowity początkowy prąd
zwarciowy.
Przedstawiony przykład wyja-
śnia, jak dużym prądem zasilają
zwarcie silniki indukcyjne podczas
wybiegu.
Prąd pochodzący od dwóch silni-
ków stanowi 9% prądu zwarciowego
płynącego ze źródła podstawowego.
Zatem zgodnie z wcześniejszymi wy-
jaśnieniami, gdy prąd zwarciowy po-
chodzący od silników przekracza 5 %
wartości prądu I
kQ
"
, powinien zostać
uwzględniony w wyznaczeniu całko-
witego prądu początkowego zwarcia
oraz prądu udarowego.
Nieuwzględnienie tych prądów
może skutkować złym doborem apa-
ratów elektrycznych wchodzących
w skład zasilanego obwodu. W ce-
lu umożliwienia szybkiej oceny ko-
nieczności uwzględniania udziału sil-
ników w prądzie zwarciowym można
skorzystać ze wzoru:
Z
Z
U
k P
I
I
M
M
n
n
kM
kM
1
2
2
2
400
0 9 0 9
6 30000
0 72
=
=
⋅ ⋅
⋅
=
=
=
=
η
ϕ
cos
* , * ,
*
,
//
Ω
11
2
1
3
1 400
3 0 72
320
//
//
max
//
//
/
,
=
=
⋅
⋅
=
=
⋅
⋅
=
=
+
I
c
U
Z
A
I
I
I
kM
n
M
kc
kQ
kM
//
//
//
,
,
,
,
. *
+
=
=
+
+
=
=
=
⋅
⋅
=
=
I
kA
i
i
I
kM
pM
pM
M
kM
2
1
2
7 15 0 32 0 32 7 79
2
1 3
χ
22 0 32 0 588
2
13 044 2 0 588 14 22
* ,
,
,
,
,
≅
=
+ ⋅
=
=
+ ⋅
=
kA
i
i
i
kA
pc
pQ
pM
Wzory B1 Parametry dla silnika załą-
czonego
Rys. 4 Przebieg zależności
T
f P p
DC
n
= ( / )
(P
rM
=P
nM
); T
DC
– stała czasowa znika-
nia składowej nieokresowej przy zwarciu na zaciskach silnika indukcyjnego
w zależności od mocy silnika przypadającej na parę biegunów.
reklama
Wyszukiwarka
Podobne podstrony:
ei 2004 10 s040
ei 2004 10 s036
ei 2004 10 s051
ei 2004 10 s038
ei 2004 10 s068
ei 2004 10 s005
ei 2004 10 s047
ei 2004 10 s072
ei 2004 10 s028
ei 2004 05 s044
ei 2004 10 s004
ei 2004 10 s014
ei 2004 10 s043
ei 2004 10 s035
ei 2004 10 s075
ei 2004 10 s077
ei 2004 10 s023
ei 2004 10 s003
ei 2004 10 s026
więcej podobnych podstron