
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Modelowanie matematyczne jako podstawa obliczeń naukowo-
technicznych:
Wybór modelu opisowego, a w konsekwencji struktury
matematycznej modelu jest w znacznym stopniu arbitralny,
Struktura matematyczna użyta do modelowania powinna by
skończenie wymiarowa – tzn.: wyczerpująco opisana za pomocą
skończonej liczby parametrów,
Kryteria oceny modelu są ściśle związane z jego przeznaczeniem.
Wniosek:
Model uznany za adekwatny w jednym zastosowaniu może się
okazać nieadekwatny w innym.

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Zadanie programowania liniowego PL
przy ograniczeniach:
( )
x
c
x
T
f
=
max
0
2
2
1
1
≥
≥
≤
x
b
x
A
b
x
A
dim x=n, dim c=n
Macierze A
1
, A
2
odpowiadają za współczynniki w m
1
i m
2
ograniczeniach
dim A
1
=[m
1
x n], dim A
2
=[m
2
x n]
Wektory b
1
, b
2
odpowiadają za prawe strony ograniczeń
dim b
1
=m
1
, dim b
2
=m
2

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Zadanie programowania liniowego - przykłady
2
1
0
1
2
max
x
x
X
x
+
=
∈
x
≥
≤
+
≤
+
−
≤
+
=
0
,
21
2
6
0
5
:
2
1
2
1
2
1
x
x
x
x
x
x
x
x
X
3
2
1
0
2
.
0
6
.
0
3
.
0
min
x
x
x
x
+
+
=
Przykład II System cięcia dłużyc
Przykład I System produkcji – maksymalizacja zysku
0
,
,
1200
2
1
0
2100
0
3
7
3
2
1
3
2
1
3
2
1
≥
≥
+
+
≥
+
+
x
x
x
x
x
x
x
x
x
przy ograniczeniach
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Przykład III
Maksymalizacja zysków w procesie produkcji w fabryce papieru.
Zakład przemysłowy produkuje papier niskiej i wysokiej jakości. Do produkcji
wykorzystywane są następujące składniki:
pulpa drzewna
chemikalia
szmaty lniane
woda
Cel: Optymalny poziom produkcji papieru niskiej i wysokiej jakości
przy uwzględnieniu ograniczeń.
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
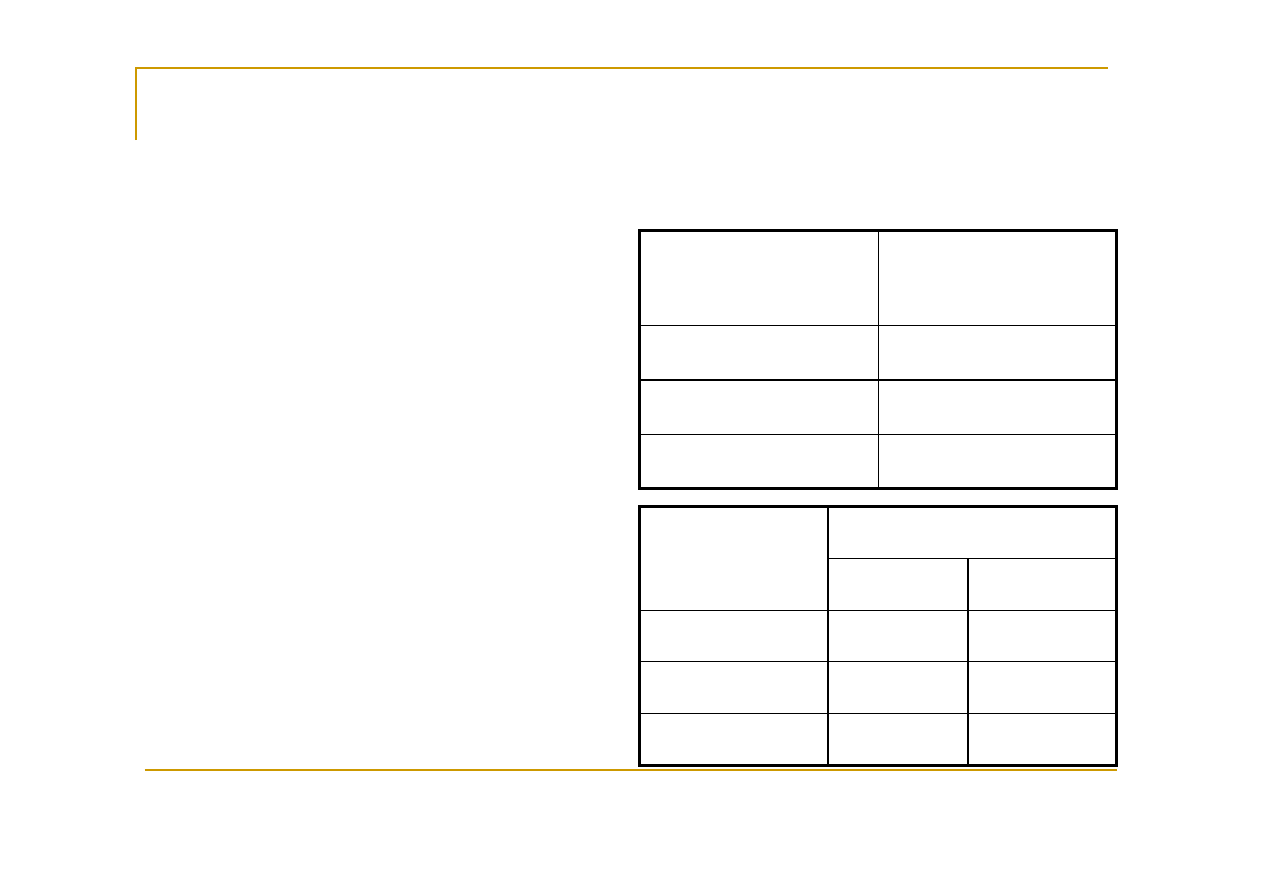
Ceny surowców kształtują się
następująco:
9
Szmaty lniane
4
Chemikalia
3
Pulpa
Cena jednost.
[zł/jedn.]
Surowiec
Woda jest wolna od opłat.
Jej zużycie jest nielimitowane.
W zależności od tego, czy
produkowany
jest papier niskiej, czy wysokiej
jakości zużywana jest różna
ilość surowców.
0,40
0,10
Szmaty
0,20
0,10
Chemikalia
1,50
1,10
Pulpa
Wysoka
Niska
Jakość papieru
Surowiec/jedn
ostkę

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Koszt wyprodukowania jednostki papieru:
niskiej jakości wynosi - 1,8 [zł], natomiast
wysokiej jakości - 1,5 [zł].
Cena sprzedaży jednostki produktu końcowego wynosi :
10 [zł] dla produktu niskiej jakości
16,5 [zł] dla produktu wysokiej jakości.
Efektem ubocznym przy produkcji papieru są ścieki. Podczas wytwarzania
jednostki papieru niskiej jakości powstają
3 jednostki ścieków
, zaś w przypadku
papieru o wysokiej jakości powstaje
6 jednostek ścieków.
Część ścieków poddawana jest procesowi oczyszczania w wyniku czego ilość
zanieczyszczenia jest redukowana o 50%. Pozostała część ścieków jest
odprowadzana do kanałów. Koszt tych operacji przedstawia się następująco:
Oczyszczanie ścieków powstałych przy produkcji papieru niskiej jakości = 0,11
[zł] na jednostkę produkcyjną,
oczyszczanie ścieków powstałych przy produkcji papieru wysokiej jakości =0,12
[zł] na jednostkę produkcyjną,
Koszt odprowadzenia jednostki ścieków do kanałów = 0,3 [zł].

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Proces produkcyjny obarczony jest z góry nałożonymi ograniczeniami:
Zakład może zakupić maksymalnie 50 jednostek pulpy drzewnej
Maksymalna przepustowość oczyszczalni ścieków wynosi 60 jednostek
Ze względu na kooperację zakład musi wytworzyć przynajmniej 12
jednostek papieru niskiej jakości
Cel: znalezienie optymalnego poziomu produkcji papieru niskiej i wysokiej
jakości, takiego aby zysk przedsiębiorstwa był maksymalny.
Uwzględnić należy wszystkie koszty generowane przez proces
produkcyjny oraz ograniczenia tegoż procesu.
W celu znalezienia maksymalnego dochodu , należy zmaksymalizować
funkcję celu przedstawiającą dochód zakładu produkcji papieru.
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Definicja problemu programowania liniowego PL
Wektor zmiennych decyzyjnych:
T
x
x
x
x
x
]
,
,
,
[
4
3
2
1
=
gdzie:
- wielkość produkcji papieru niskiej jakości
-wielkość produkcji papieru wysokiej jakości
-ilość oczyszczanych ścieków przy produkcji papieru niskiej jakości
- ilość oczyszczanych ścieków przy produkcji papieru wysokiej jakości.
4
3
2
1
x
x
x
x
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
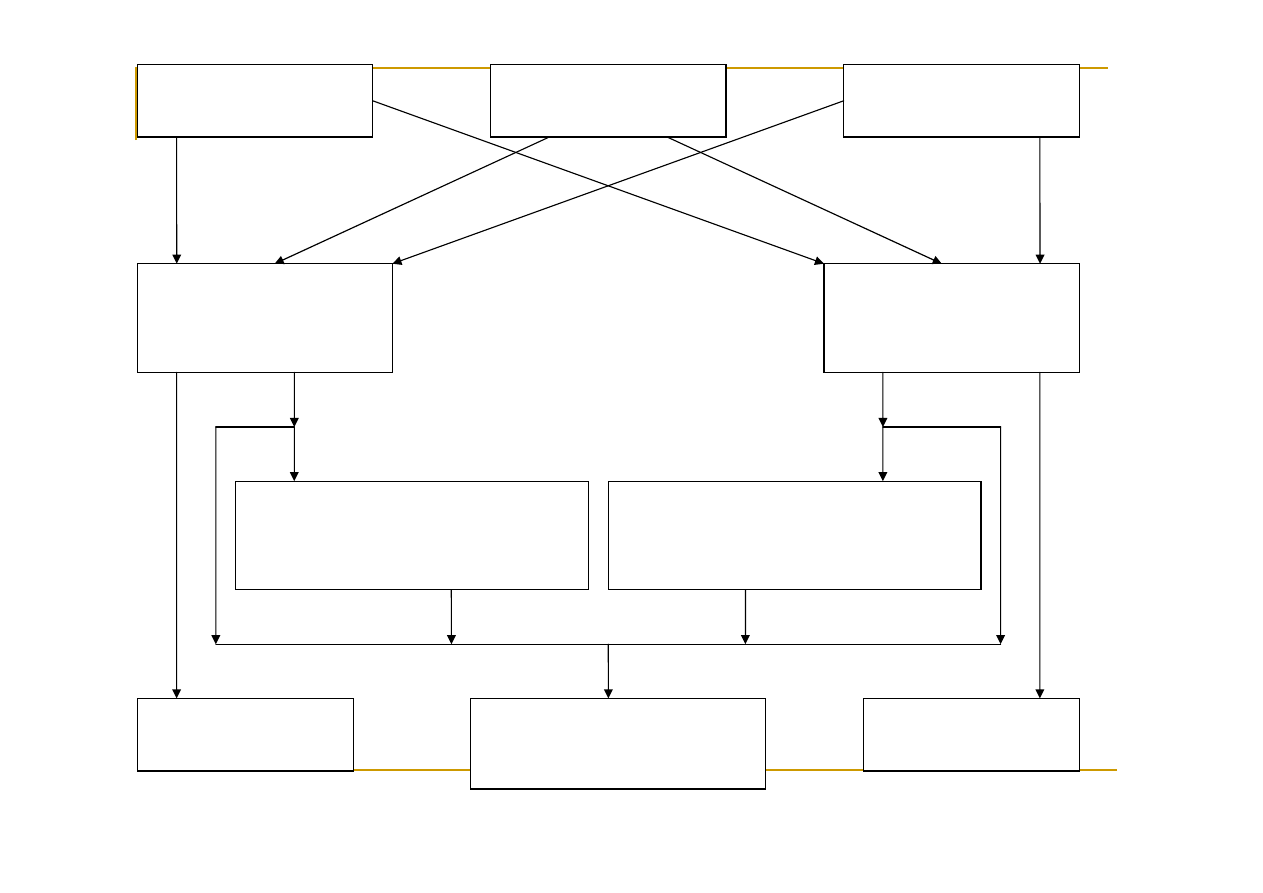
Pulpa drzewna
(koszt jednostki 3)
Chemikalia
(koszt jednostki 4)
Szmaty lniane
(koszt jednostki 9)
Koszt produkcji
jednostki papieru
niskiej jakości 1,8
Koszt produkcji
jednostki papieru
wysokiej jakości 1,5
Koszt oczyszczania jednostki
ścieków przy produkcji papieru
niskiej jakości 0,11
Koszt oczyszczania jednostki
ścieków przy produkcji papieru
wysokiej jakości 0,12
Cena sprzedaży
10
Cena sprzedaży
16,5
Koszt jednostki
usuwanych ścieków 0,3
1,1x
1
0,1x
1
0,1x
1
0,4x
2
0,2x
2
1,5x
2
x
1
x
2
3x
1
6x
2
x
3
x
4
3x
1-
x
3
6x
2-
x
4
0,5x
3
0,5x
4

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
dochód
koszty produkcji
koszty materiałów do produkcji papieru niskiej jakości
koszty materiałów do produkcji papieru wysokiej jakości
koszty oczyszczania ścieków
koszt odprowadzenia ścieków
W celu znalezienia maksymalnego zysku, należy maksymalizować funkcję celu w
postaci: dochód – koszty.
Wyznaczenie funkcji celu i ograniczeń zadania produkcji papieru
2
1
5
,
16
10
x
x +
2
1
5
,
1
8
,
1
x
x +
1
1
1
1
,
0
9
1
,
0
4
1
,
1
3
x
x
x
⋅
+
⋅
+
⋅
2
2
2
4
,
0
9
2
,
0
4
5
,
1
3
x
x
x
⋅
+
⋅
+
⋅
4
3
12
,
0
11
,
0
x
x +
(
)
(
)
[
]
4
4
2
3
3
1
5
,
0
6
5
,
0
3
3
,
0
x
x
x
x
x
x
+
−
+
+
−
(
) (
)
(
) (
)
(
)
(
)
[
]
(
)
4
3
2
1
4
4
2
3
3
1
4
3
2
2
1
1
2
1
2
1
03
,
0
04
,
0
4
,
4
7
,
2
5
,
0
6
5
,
0
3
3
,
0
12
,
0
11
,
0
4
,
0
9
2
,
0
4
5
,
1
3
1
,
0
9
1
,
0
4
1
,
1
3
5
,
1
8
,
1
5
,
16
10
)
(
max
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
X
F
X
+
+
+
=
=
+
−
+
+
−
−
+
+
−
⋅
+
⋅
+
⋅
−
+
⋅
+
⋅
+
⋅
−
+
−
+
=

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Zatem funkcja celu jest postaci:
Uwzględniając następujące ograniczenia :
maksymalna ilość pulpy
maksymalna przepustowość oczyszczalni
ścieków
wymaganie nieujemnego przepływu
wymaganie nieujemnego przepływu
wymaganie wyprodukowania określonej
liczby papieru niskiej jakości
Wymaganie produkowania określonej liczby
papieru wysokiej jakości:
4
3
2
1
03
,
0
04
,
0
4
,
4
7
,
2
)
(
max
x
x
x
x
X
F
X
+
+
+
=
50
5
,
1
1
,
1
2
1
≤
+
x
x
60
4
3
≤
+ x
x
0
3
3
1
≤
− x
x
0
6
4
2
≤
− x
x
12
1
≥
x
0
2
≥
x

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Zadanie maksymalizacji zysku produkcji papieru
4
3
2
1
0
03
.
0
04
.
0
5
.
1
7
.
2
max
x
x
x
X
x
+
+
+
=
∈
x
x
≥
≥
−
≥
≥
−
≤
+
≤
+
12
0
6
0
,
0
3
60
50
5
.
1
1
.
1
1
4
2
3
1
2
1
2
1
x
x
x
x
x
x
x
x
x
x
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Zadanie programowania nieliniowego PN
przy ograniczeniach:
( )
=
∧
∈
x
x
x
f
f
X
min
{
}
m
i
g
x
X
i
,...,
1
,
0
)
(
=
≤
=
x
Zadanie programowania nieliniowego polega na znalezieniu wektora zmiennych
decyzyjnych
, należącego do zbioru rozwiązań dopuszczalnych X w postaci:
takiego, że dla
X
∈
∀x
( )
x
x
f
f
≤
∧
∧
x
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Przykład zadania programowania nieliniowego
Przykład IV. Zadania sterowania siecią dystrybucji wody minimalizujące
zużycie energii elektrycznej
Dana jest sieć dystrybucji wody w postaci:
m- węzłów,
s - odbiorców z odpowiednimi potrzebami, w których utrzymywane jest
odpowiednie ciśnienie oraz n łuków,
każdy łuk „i” charakteryzuje się przepływem y
i
:
Opis sieci:
spadek ciśnienia x
i
na łuku „i”:
gdzie: r
i
- opór hydrauliczny łuku „i”
d
i
- różnica wysokości geodezyjnych łuku „i”
Ograniczenia wynikające ze struktury sieci:
I prawo Kirchhoff’a:
A – macierz incydencji dla węzłów sieci wodociągowej,
II prawo Kirchhoff’a:
B – macierz oczkowa dla węzłów sieci wodociągowej.
i
i
i
i
i
d
y
y
r
x
+
=
sgn
2
n
R
y∈
n
R
x∈
s
R
∈
σ
σ
=
y
A
0
=
x
B

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Sterowanie siecią dystrybucji wody minimalizujące zużycie energii
elektrycznej
( )
i
n
i
i
y
f
y
f
∑
=
=
1
)
(
min
gdzie:
( )
i
i
i
i
i
i
i
i
i
y
d
y
y
r
y
x
y
f
+
=
=
sgn
3
przy ograniczeniach
:
σ
=
y
A
0
=
x
B
i
i
i
i
i
d
y
y
r
x
+
=
sgn
2
n
R
y∈
n
R
x∈
s
R
∈
σ

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Przykład V: Znaleźć najlepszą liniową aproksymację nieznanej funkcji
określonej poprzez tabelę 20 pomiarów.
Wyznaczyć optymalne wartości wektora współczynników b=[b
1
, b
2
, b
3
, b
4
] formy liniowej :
gdzie: u - wektor wielkości sterujących, y - wektor wielkości wyjściowych
Dane: tabela z 20 pomiarami wektora u wielkości sterujących oraz wektora wielkości
wyjściowych
dla następujących kryteriów jakości:
1.
minimum sumy wartości bezwzględnych różnic między wartościami wektora wyjść a
wartościami otrzymanymi z modelu liniowego:
gdzie:
- wartości zmierzone wielkości wyjściowych
i=1,...,20 - wielkości wyjściowe obliczone na podstawie
modelu
Zadanie trudne do rozwiązania, ponieważ funkcja celu jest nie-różniczkowalna.
u
b
y
T
=
( )
∑
=
−
=
20
1
~
)
(
[
min
i
i
i
b
y
y
b
f
20
,...,
1
~
=
i
y
i
)
(b
y
i
( )
i
i
i
i
i
u
b
u
b
u
b
u
b
b
y
4
4
3
3
2
2
1
1
+
+
+
=

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Równoważne zadanie programowania liniowego
Wprowadzono nową zmienną:
-
Zwiększenie wymiaru zadania: 24 zmienne niezależne
przy ograniczeniach:
dla i=1,...,20
Zadanie programowania liniowego:
-
funkcja celu jest wypukła
-
rozwiązano metodą dwufazową simpleks
.
.
Wektor b optymalnych wsp
Wektor b optymalnych wsp
ó
ó
ł
ł
czynnik
czynnik
ó
ó
w :
w :
( )
b
y
y
z
i
i
i
−
= ~
∑
=
=
20
1
)
(
min
i
i
z
b
f
i
i
i
i
i
i
i
z
u
b
u
b
u
b
u
b
y
z
≤
−
−
−
−
≤
−
4
4
3
3
2
2
1
1
~
87
,
51
1
=
b
232
,
1
2
=
b
122
,
0
3
−
=
b
08
,
1
4
−
=
b

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Drugie kryterium jakości
2. minimum sumy kwadratów różnic między wartościami wektora wyjść a
wartościami otrzymanymi z modelu liniowego:
gdzie:
- wartości zmierzone wielkości wyjściowych
- i=1,...,20 - wielkości wyjściowe obliczone na podstawie
modelu
Zadanie programowania nieliniowego:
funkcja celu jest wypukła
rozwiązano metodą gradientów sprzężonych w wersji Polak’a-Ribiere’y.
( )
(
)
2
20
1
~
)
(
[
min
∑
=
−
=
i
i
i
b
y
y
b
f
20
,...,
1
~
=
i
y
i
)
(b
y
i
( )
i
i
i
i
i
u
b
u
b
u
b
u
b
b
y
4
4
3
3
2
2
1
1
+
+
+
=
Wyniki identyfikacji zależą od wyboru kryterium optymalizacji i przyjętej
dokładności obliczeń.
28
,
39
1
=
b
07
,
1
2
=
b
16
,
0
3
=
b
94
,
0
4
−
=
b

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Przykład VI- Symulacja ruchu ramienia robota przemysłowego
Adekwatny model matematyczny dla szerokiej klasy obiektów sterowania- to układ równań
różniczkowych zwyczajnych pierwszego rzędu.
W tym celu:
1.
Konkretne ustalenie liczby równań
2.
Oznaczenie wartości parametrów tych równań
3.
Ustalenie warunków początkowych
4.
Jeżeli to możliwe - uproszczenie modelu do postaci równań liniowych
5.
Poszukiwanie rozwiązania, minimalizującego błędy, wynikające z opisu w postaci modelu
matematycznego – układu równań różniczkowych .
Proces symulacji:
Numeryczne rozwiązanie równań różniczkowych poprzez:
•
Zastąpienie pochodnych – ilorazami różnicowymi
•
Rozwiązanie wynikającego z tego faktu układu równań liniowych.
•
Minimalizacja błędu dla układu równań różniczkowych.

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Przykład VII- Zadanie lokalizacji magazynu i ustalania tras dostaw
optymalizacji sieci tras dostaw z wyborem najlepszego położenia dla
magazynu
Przykład VIII –
Zadania klasy VRP
np..: Firma CorbitConnect - obsługa rynku dostaw
np.: - procedury logistyczne:
-
Route scheduling, optimisation and disposition
-
Fleet management and controlling
-
Fleet controlling
-
Mobile navigation with tour management
-
Mobile tour management
np.: Program PLANTOUR - Firma CorbitConnect

Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Rozwiązywanie zadań inżynierskich – to umiejętność sprowadzania tych
zadań do standardowych problemów numerycznych, takich jak:
Rozwiązywanie układu liniowych równań algebraicznych,
Rozwiązywanie układu nieliniowych równań algebraicznych,
Aproksymacja i interpolacja funkcji jednej i wielu zmiennych,
Różniczkowanie funkcji jednej i wielu zmiennych,
Całkowanie układów równań różniczkowych zwyczajnych,
Rozwiązywanie zadań optymalizacji liniowej,
Rozwiązywanie zadań optymalizacji nieliniowej.
Zadanie numeryczne – to proces przetwarzania pewnego elementu zbioru
danych
D
D
w taki element zbioru wyników
W,
W,
który spełnia zadane wymagania
R
1
, R
2
,….
Układ
{
}
,...
,
,
,
2
1
R
R
W
D
To klasa zadań numerycznych.
Wyszukiwarka
Podobne podstrony:
1w timo 2011
11w timo 2011
7w timo 2011
6w timo 2011
5w timo 2011 cz2
3w timo 2011
9w timo 2011
8w timo 2011
10w timo 2011
4w timo 2011 cz1
4w timo 2011 cz1
2w to przyklady 2011
2011 2 KOSZE
higiena dla studentów 2011 dr I Kosinska
Plan pracy na 2011 pps
W 8 Hormony 2010 2011
więcej podobnych podstron