
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Programowanie liniowe całkowitoliczbowe
PCL
Metodologia podziału i oszacowań – Branch and Bound Technique
(B&B)
Z
x
∈
≥
=
=
x
0,
x
b,
x
A
x,
c
T
max
0
• Podstawą metodologii B&B jest przegląd drzewa rozwiązań.
• Wykorzystuje się fakt skończoności zbioru możliwych wartości
zmiennych całkowitoliczbowych w przypadku ograniczonych
zadań PCL.
• Etapy metody: -podział
-gałęzienie
-obliczanie górnych i dolnych oszacowań
funkcji celu.
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Metodologia podziału i oszacowań – B&B
iczbowy},
calkowitol
i
0
,
{
≥
=
=
x
b
x
A
x
S
j
j
j
}
0
,
{
T
j
≥
=
=
x
b
x
A
x
j
j
Osłabienie, które prowadzi do zadania PL:
j
j
S
T ⊇
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Metodologia podziału i oszacowań – B&B
Podział.
Przyjmijmy, że zadanie PL zostało rozwiązane dla
wierzchołka v
j ,
przy czym x (j) ma nie wszystkie składowe
całkowitoliczbowe. Przykładowo niech pewna zmienna
Podział S
j
, który jest przy tym rozbiciem zbioru, jest następujący:
Gdzie <a> jest najmniejszą liczbą całkowitą większą lub równą a, [a]
zaś oznacza największą liczbę całkowitą mniejszą lub równą a.
}},
{
},
]
[
{
{
.
1
0
,
]
[
0
0
*
0
0
0
>
≥<
∩
≤
∩
=
<
<
+
=
i
Bi
j
i
Bi
j
j
i
i
i
Bi
y
x
x
S
y
x
x
S
S
f
f
y
x
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Metodologia podziału i oszacowań – B&B
Skończoność. Załóżmy, że każda ze zmiennych x
j
jest
ograniczona i jej granica górna wynosi u
j
. Niech
Zadanie PL jest pożądanym osłabieniem zadania PCL, gdyż
dołączone ograniczenia dają górną i dolną granicę dla
poszczególnych zmiennych.
Zagadnienia PL przy założeniu ograniczoności zmiennych
rozwiązuje się algorytmem dualnym sympleks.
}.
,...,
1
,
0
{
},
,...,
1
,
0
,
{
n
j
x
u
x
x
H
n
j
u
x
b
Ax
x
S
j
j
k
j
j
k
j
k
j
k
j
j
k
j
k
=
≤
≤
≤
≤
=
=
≤
≤
≤
≤
=
=
β
α
β
α
całkowite
całkowite
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
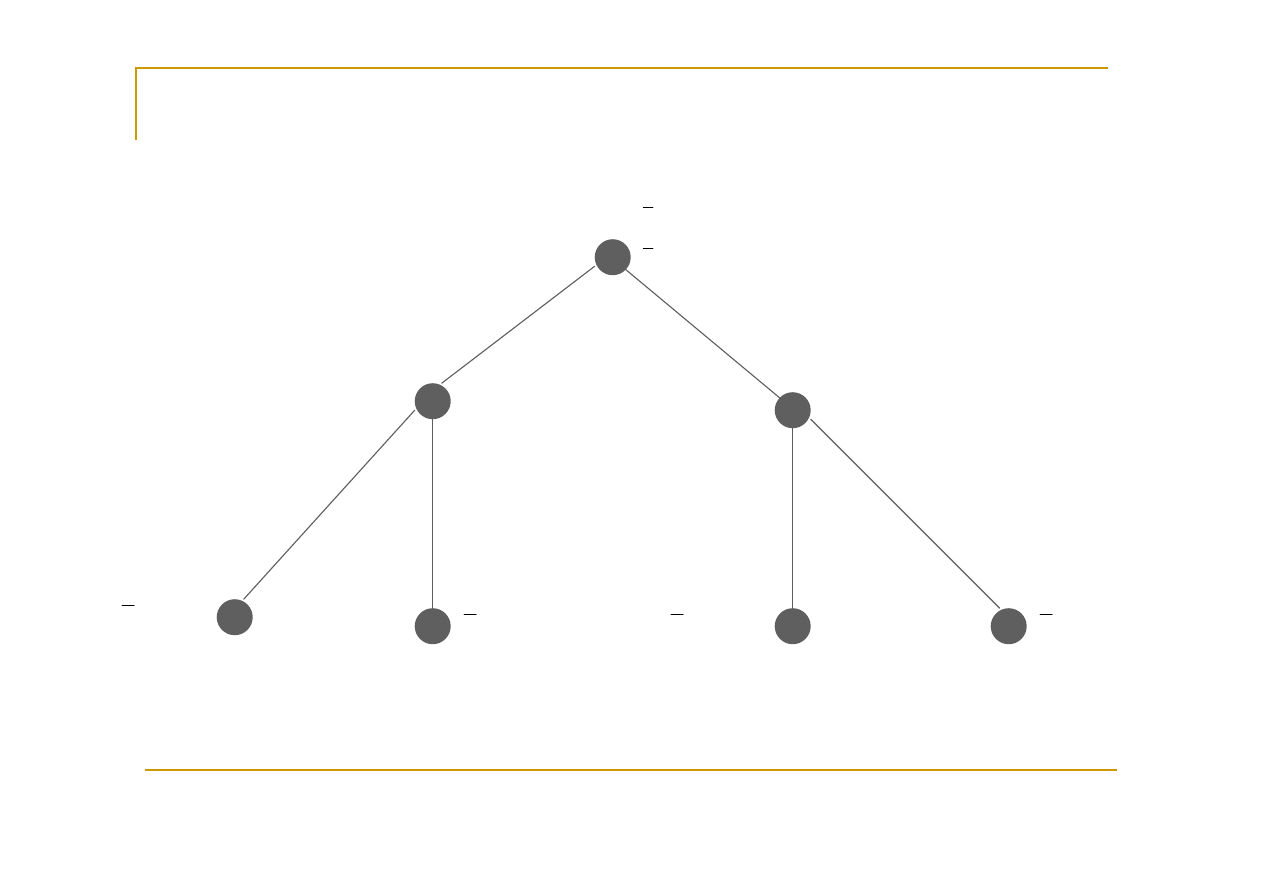
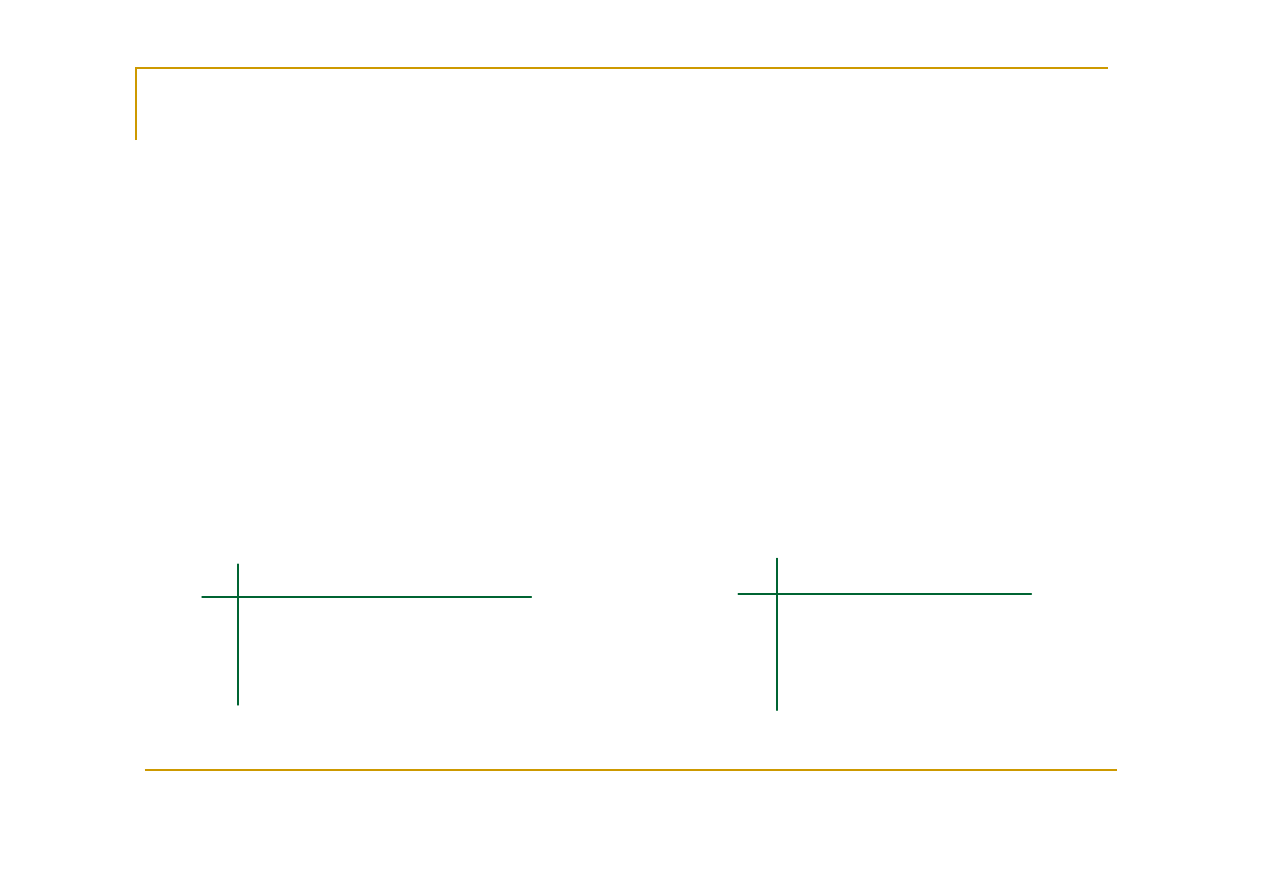
Drzewo rozwiązań
0
0
1
1
2
2
3
3
4
4
5
5
6
6
17
15
−
=
−
=
z
z
4
2
≥
x
3
2
≤
x
0
1
≤
x
0
1
≤
x
1
1
≥
x
1
1
≥
x
15
−
=
z
15
−
=
z
17
−
=
z
18
−
=
z
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
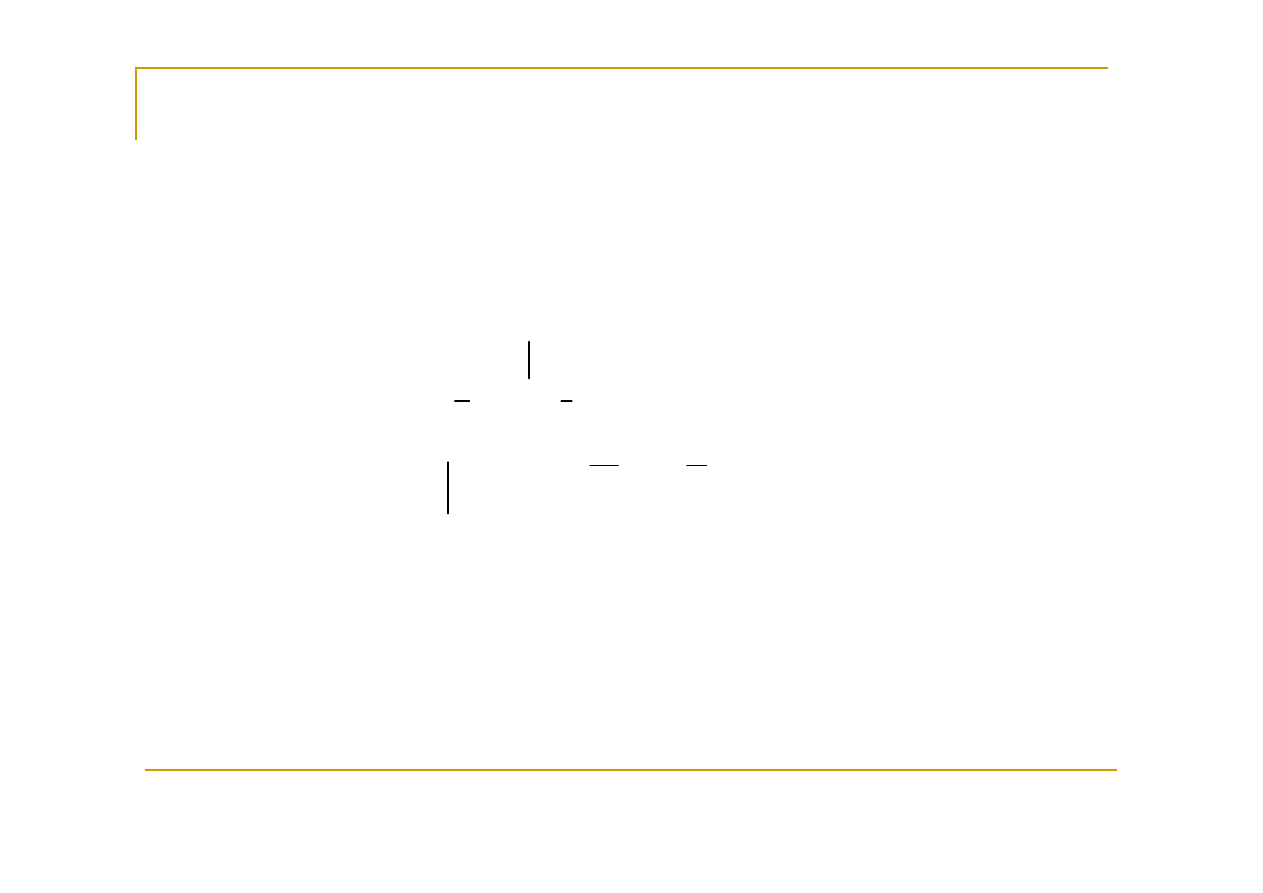
Przykład zadania PCL
0
,
,
5
3
8
3
2
3
2
1
5
3
2
1
4
3
2
1
≥
=
−
+
+
=
−
+
+
x
x
x
x
x
x
x
x
x
x
x
3
2
1
0
4
3
7
max
x
x
x
x
−
−
−
=
2
1
5
2
1
1
3
5
3
1
2
15
4
2
0
5
3
1
−
−
−
−
−
−
−
x
x
x
x
x
x
2
.
0
2
.
0
4
.
0
4
.
0
6
.
0
6
.
1
2
.
0
8
.
3
4
.
0
6
.
0
2
.
2
2
.
14
1
2
0
5
3
1
−
−
−
−
−
−
−
x
x
x
x
x
x
Rozwiązanie PL
Rozwiązanie PCL

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Przegląd pośredni
metodologia podziału i oszacowań dla wektora binarnego
śą
śą
danie binarno
danie binarno
ś
ś
ci wektora x nie jest ograniczeniem
ci wektora x nie jest ograniczeniem
zadania gdy jest znana sko
zadania gdy jest znana sko
ń
ń
czona g
czona g
ó
ó
rna granica
rna granica
u
u
j
j
dla
dla
sk
sk
ł
ł
adowej
adowej
x
x
j
j
{
}
pj
j
j
j
j
j
j
s
s
S
x
u
x
i
Z
x
dla
,...,
0
1
=
∈
≤
≤
∈
Jest ono równoważne układowi ograniczeń:
j
o
każ
dla
p
k
j
o
każ
dla
s
x
kj
p
k
kj
p
k
kj
kj
j
deg
,...,
2
,
1
,
1
lub
0
deg
1
1
1
=
=
=
=
∑
∑
=
=
δ
δ
δ

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Przegląd pośredni
metodologia podziału i oszacowań dla wektora binarnego
Etapy metody:
podział – wybór pewnej zmiennej x
j
i przyjęcie
{
}
{
}
{
}
1
,
,
0
,
*
=
∩
=
∩
=
j
k
j
k
k
x
S
x
S
S
x
x
oraz
{
}
{
}
{
}
k
k
j
k
k
j
k
k
W
j
j
F
x
i
W
j
j
S
x
i
W
j
j
S
∉
=
=
∈
=
=
∈
=
−
+
,
0
,
1
,

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Podział pośredni
oszacowania – wierzchołkowi v
k
przyporządkowany jest problem:
,
max
∑
∑
∈
∈
+
+
=
k
k
F
j
S
j
j
j
j
k
c
x
c
z
,
,...,
1
,
m
i
s
a
b
x
a
k
k
F
j
S
j
i
ij
i
j
ij
=
=
−
≤
∑
∑
∈
∈
+
.
,
1
lub
0
k
j
F
j
x
∈
=
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Programowanie liniowe całkowitoliczbowe
metodologia odcięć
Załóżmy, że istnieją
oraz
takie, że:
Z}.
x
i
0
,
{
,
max x
0
∈
≥
=
=
∈
=
x
b
Ax
x
S
x
x
c
T
b
A
}
0
,
,
{
≥
=
=
=
x
b
x
A
b
Ax
x
T
oraz zadanie osłabione w stosunku do zadania (1):
ma całkowitoliczbowe rozwiązanie optymalne x
opt
.
Wówczas
x
opt
jest rozwiązaniem optymalnym zadania (1).
T
S ⊆
T
x
x
c
T
∈
=
,
max x
0
(1)
(1)
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Metoda odcięć
Załóżmy, że mamy reprezentację problemu (2) w postaci
}.
0
,
{
,
max x
0
≥
=
=
∈
=
x
b
Ax
x
Q
x
x
c
T
∑
∈
=
−
=
R
j
j
ij
i
B
m
i
x
y
y
x
i
,
,...,
1
,
0
,
0
∑
∈
−
≥
−
R
j
i
i
j
ij
ij
hy
y
h
x
hy
y
h
]
[
]
[
])
[
]
([
0
0
Podstawowe odci
Podstawowe odci
ę
ę
cie
cie
(2)

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Odcięcia w metodzie form całkowitych
]
[
]
[
a
),
]
[
]
([
)
(
.
0
,
,
]
[
.
]
[
])
[
(
0
0
0
0
0
0
0
∑
∑
∑
∑
∑
∑
∈
∈
∈
∈
∈
∈
−
−
+
+
−
−
=
≥
+
−
=
≥
+
=
−
≥
−
R
j
j
ij
i
R
j
R
j
j
ij
i
j
ij
i
Bi
R
j
j
ij
i
R
j
i
j
ij
ij
ij
ij
R
j
i
i
j
ij
ij
x
y
y
x
y
y
x
f
f
x
s
x
f
f
s
f
x
f
f
y
y
y
y
x
y
y
s musi być liczbą całkowitą:
jest ca
jest ca
ł
ł
kowite.
kowite.

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Heurystyczne reguły wyboru wiersza źródłowego
Należy zbudować odcięcie usuwające największy możliwy
obszar nie zawierający punktów całkowitoliczbowych.
↑
↓
0
i
ij
f
a
f
Pożądane jest aby f
i0
było możliwie duże a
f
ij
było możliwie małe dla j
∈
∈
∈
∈R
Odcięcie staje się „głębsze”, jeśli
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Reguły wyboru wiersza w metodzie form całkowitych
0
0
max
i
i
r
f
f
=
∑
∑
∈
∈
=
R
j
ij
i
i
R
j
rj
r
f
f
f
f
0
0
max
ik
i
i
rk
r
f
f
f
f
0
0
max
=
Dla określonego
R
k ∈
( I )
( II )
( III )
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Badanie całkowitoliczbowości rozwiązania PCL
W obliczeniach komputerowych liczba rzeczywista r jest
traktowana jako liczba całkowita, jeśli
ε
≤
−
}
,
1
{
min
r
r
f
f
I na odwrót – błędne stwierdzenie całkowitoliczbowości może
spowodować niepoprawne zakończenie obliczeń.
Nierozpoznanie całkowitoliczbowości może powodować:
wykonanie niepotrzebnych iteracji,
dołączenie niepoprawnych odcięć
utratę rozwiązania optymalnego.

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Optymalne rozwiązanie zadania PCL
Rozwiązanie dopuszczalne x zadania PCL jest jego
rozwiązaniem optymalnym, gdy są spełnione trzy
warunki:
(i) prymarna dopuszczalność,
(ii) całkowitoliczbowość,
całkowite,
(iii) dualna dopuszczalność,
dla wszystkich
;
,...,
1
,
0
0
m
i
y
i
=
≥
m;
1,...,
i
0
=
i
y
R
j
y
j
∈
≥
0
0

Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Przegląd algorytmów metodologii odcięć
1.
Metoda form całkowitych- nie spełniony warunek
całkowitoliczbowości y
i0
dla i=1,...,m
m
i
dla
y
i
,...,
1
0
0
=
≥
3.
3. Całkowitoliczbowy algorytm prymalny – nie spełniony
warunek dualnej dopuszczalności:
R
∈
∀
≥
j
dla
y
j
0
0
2. Całkowitoliczbowy algorytm dualny – nie spełniony
warunek prymalnej dopuszczalności:
Teoria i metody optymalizacji
Dr inż. Ewa Szlachcic
Wydział Elektroniki studia II st.
kier. Automatyka i Robotyka
Algorytm odcięć dla zadania PCL
Krok 1
Znajdź rozwiązanie spełniające dwa spośród trzech
wymienionych warunków. Idź do Kroku 2.
Krok 2
- Test na optymalność
Jeśli trzeci warunek jest spełniony – Stop. W
przeciwnym wypadku idź do Kroku 3.
Krok 3
- Odcinanie i eliminacja
Dodaj odcięcie z odpowiednio dobraną wartością h.
Dokonaj eliminacji – aby zachować dwa wybrane warunki.
Może zaistnieć konieczność wykonania większej liczby
kroków eliminacji. Wróć do Kroku 2.
Wyszukiwarka
Podobne podstrony:
2w timo 2011
1w timo 2011
11w timo 2011
7w timo 2011
6w timo 2011
5w timo 2011 cz2
3w timo 2011
9w timo 2011
10w timo 2011
4w timo 2011 cz1
4w timo 2011 cz1
8w to pn bez ogran 2011
2011 2 KOSZE
higiena dla studentów 2011 dr I Kosinska
Plan pracy na 2011 pps
W 8 Hormony 2010 2011
więcej podobnych podstron