
GEODEZJA
WYKŁAD
Pomiary kątów
Katedra Geodezji im. K. Weigla
ul. Poznańska 2/34

DEFINICJE
Do rozwiązywania zadań z geodezji konieczna jest
znajomość kątów w figurach i bryłach obiektów.
W geodezji przyjęto mierzyć:
-
kąty poziome
(horyzontalne)
{0,360
o
}
-
kąty pionowe
(wertykalne)
{0,90
o
;0-90
o
}
-
kąty zenitalne
z = 90
o
- {0,180
o
}
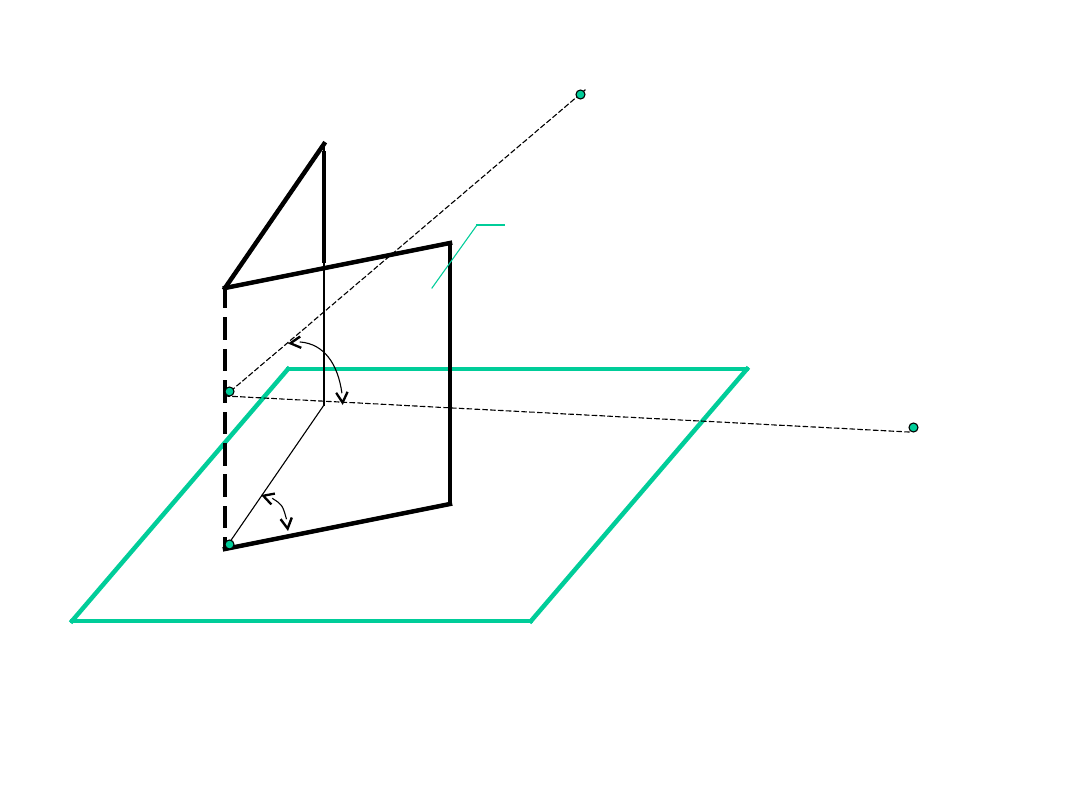
Kąt poziomy zgodnie z definicją z geodezji to
kąt
dwuścienny
, którego krawędź (linia pionu) zawiera
wierzchołek kąta (stanowisko pomiaru), zaś w
płaszczyznach ścian leży lewe i prawe ramię kąta
(
płaszczyzny kolimacyjne
).
Ramiona kąta to kierunki biegnące od stanowiska
do lewego i prawego punktu celu.
Miarą kąta
dwuściennego
jest kąt
w płaszczyźnie prostopadłej
do krawędzi (
poziomej
).
C
L
P
Płaszczyzna pozioma
Płaszczyzny
kolimacyjne
v
v
C
’
o
- kąt
poziomy
vv – styczna do
linii pionu w pkt
C
Kąt poziomy

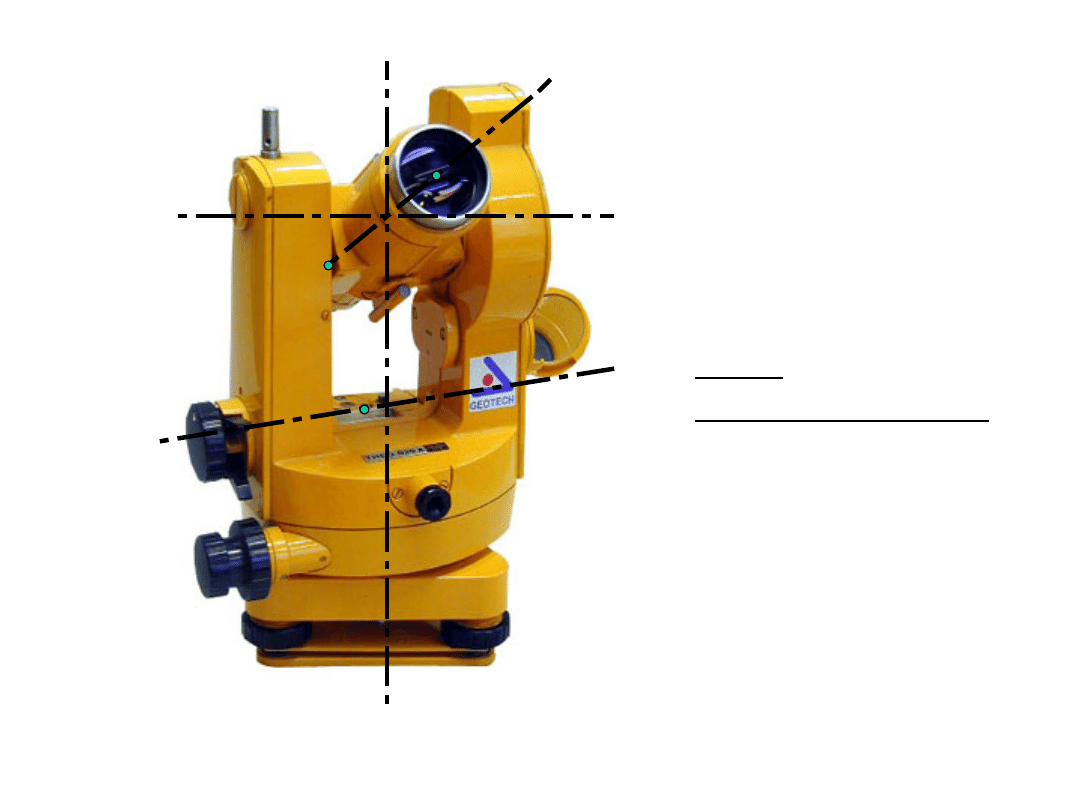
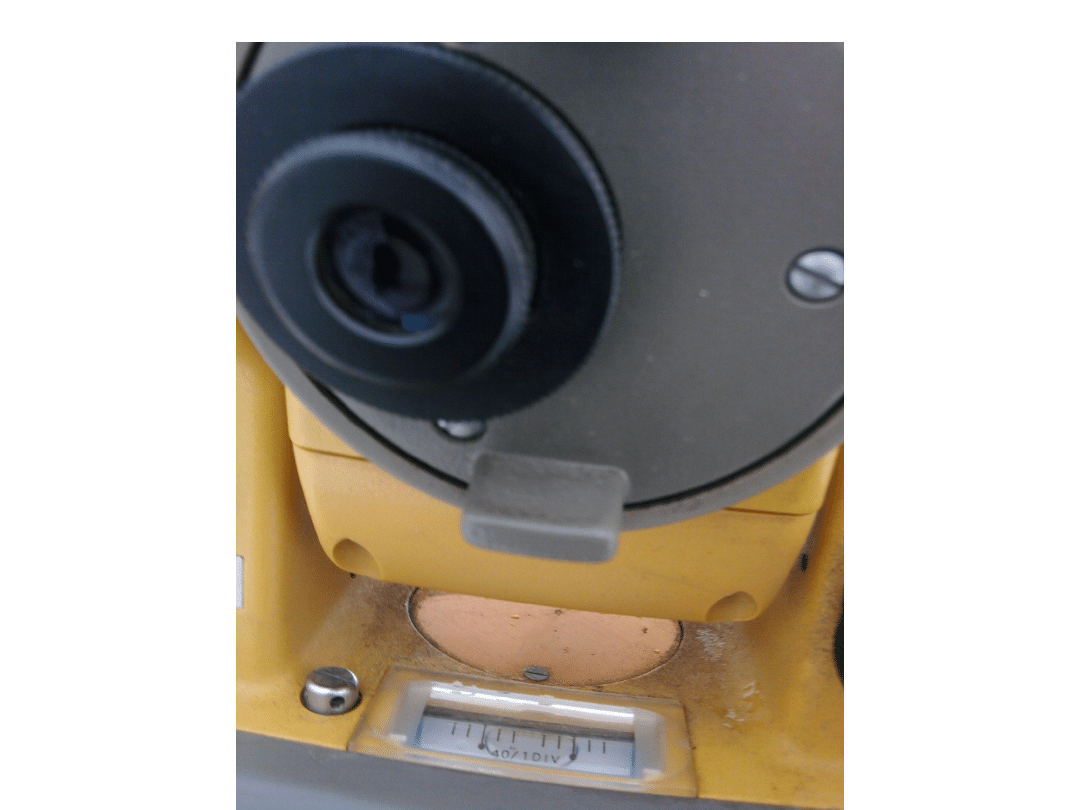
Widok teodolitu optycznego
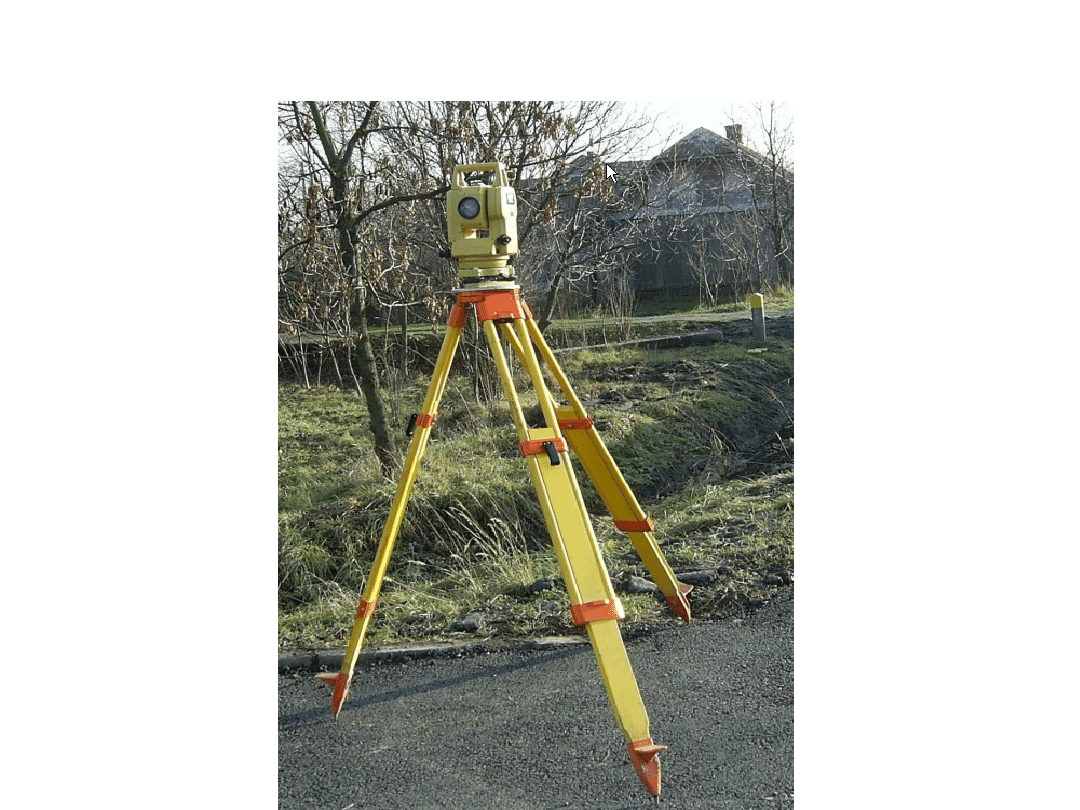
Stacja pomiarowa TOPCON
c
c
L
L
p
p
v
v
Warunki osi
teodolitu:
libeli: LL
vv
kolimacji: cc
pp
inklinacji: pp
vv
vv – oś obrotu
(pionowa)
pp – oś obrotu
lunety
(pozioma)
LL – oś libeli
alhidadowej
cc – oś celowa
lunety
Osie
geometryczne:
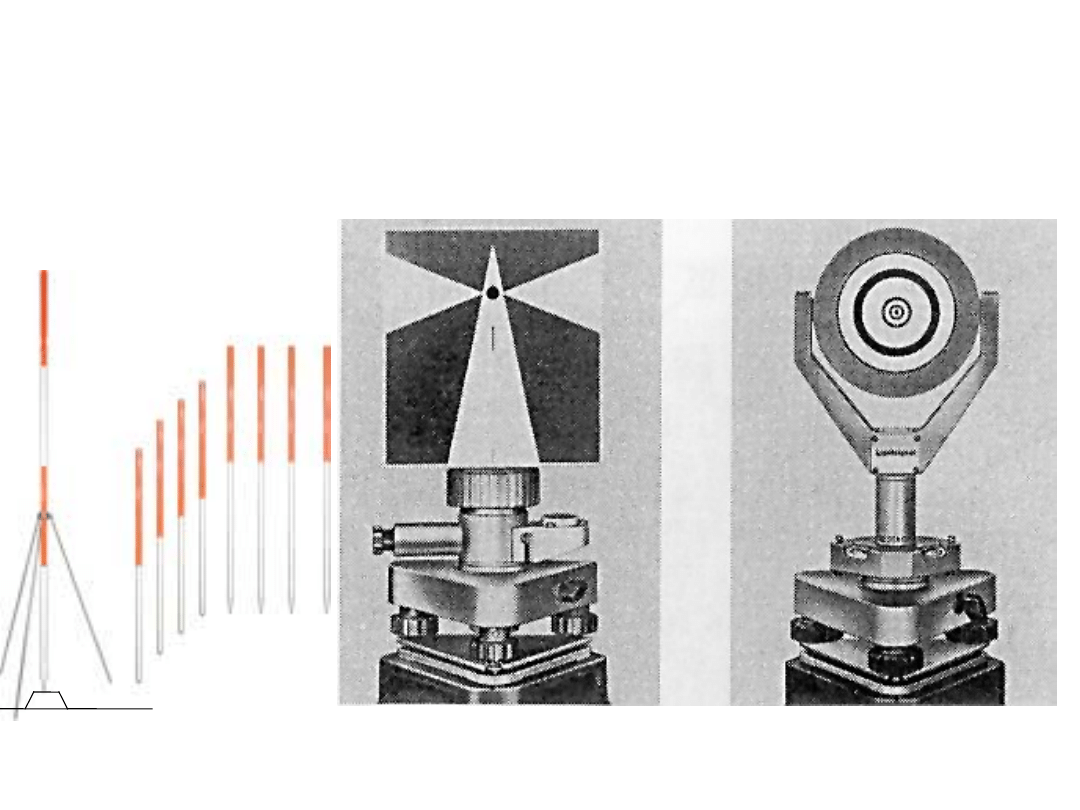
SYGNALIZACJA CELU
Tarcze sygnałowe
Tyczki geodezyjne

Sprawdzenie teodolitu
W teodolitach klasy technicznej
sprawdzeniu
podlegają warunki geometryczne osi, libele,
system odczytowy, miejsce zera i pionownik
optyczny.
Podstawowe warunki geometryczne
. Należą
do nich:
1. Warunek libeli alhidadowej,
2. Warunek siatki kresek,
3. Warunek pionu optycznego,
4. Warunek kolimacji,
5. Warunek inklinacji,
6. Warunek miejsca zera,

SPRAWDZENIE I REKTYFIKACJA
Rektyfikacja
to zabieg polegający na zapewnieniu
spełnienia wymaganych warunków osi teodolitu
lub zmniejszenia błędów poniżej wartości
dopuszczalnych.
Rektyfikację współczesnych teodolitów może
wykonać specjalistyczny serwis.
Przed sprawdzeniem należy wykonać pionowanie
głównej osi obrotu teodolitu (vv):
Operacja ta jest wykonywana tradycyjnie w 2
etapach. Przy tym można wykorzystać libelę
pudełkową do wstępnego pionowania osi
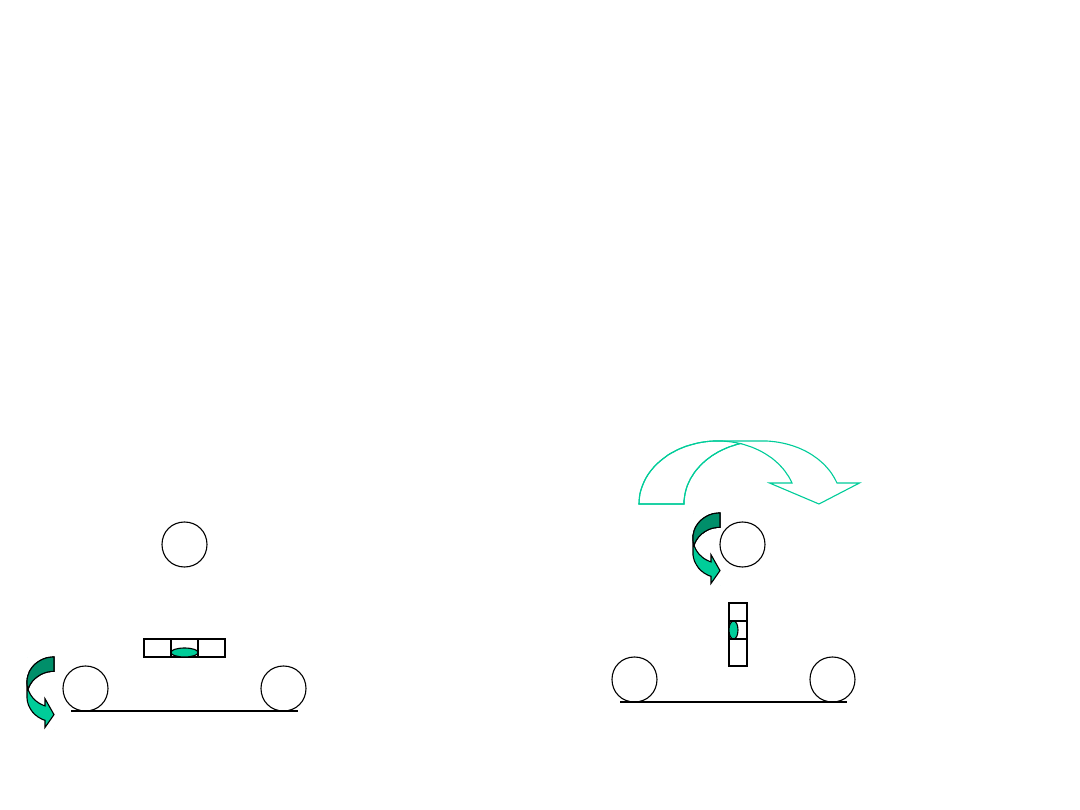
Zasady pionowania głównej osi obrotu (vv):
a) Etap I. Ustawienie libeli w pozycji równoległej do
linii łączącej dwie śruby ustawcze i sprowadzenie
pęcherzyka libeli do położenia centralnego
(górowania).
b) Etap II. Po obrocie alhidady o 90
o
sprowadzenie
pęcherzyka libeli do położenia centralnego.
Obrót o 90
o
Etap I
Etap II
Obrót o 180
o
Etap I
Etap II
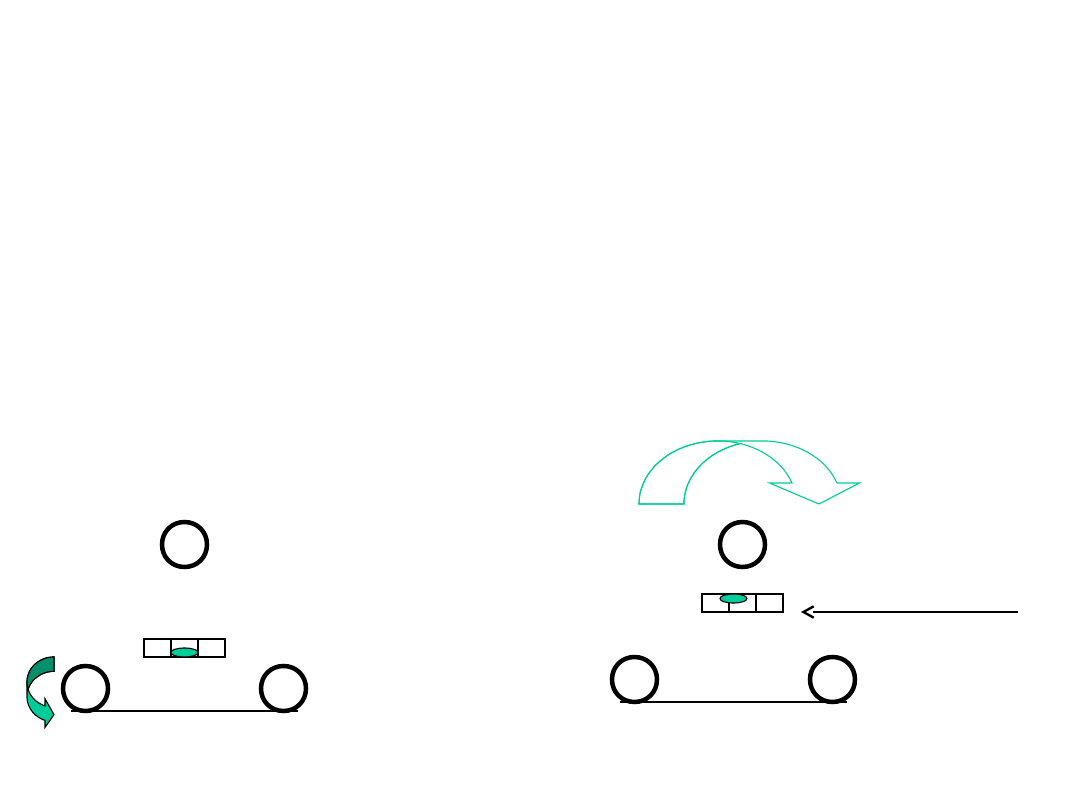
1. Sprawdzenie warunku libeli alhidadowej.
Przeprowadza się w dwóch etapach:
a) Pierwszy etap identyczny jak w przypadku
pionowania osi.
b) Drugi etap
po obrocie alhidady o
180
o
należy
ocenić przesunięcie pęcherzyka libeli z położenia
centralnego. Wielkość przesunięcia pęcherzyka
odpowiada podwojonej wartości błędu libeli.
Jeżeli odchyłka 2dz. podziałki libeli nie
potrzeba rektyfikować.
Odczyt z
podziałki
libeli
LIBELA
2.
Sprawdzenie warunku kolimacji
: Oś celowa
lunety powinna być prostopadła do poziomej osi
obrotu lunety (cc||pp).
Wpływ kolimacji na odczyt kierunku w teodolicie:
=c/cos(z)
Po wycelowaniu do wybranego punktu przy
poziomej (w przybliżeniu) osi celowej, wykonujemy
odczyty kątów w dwóch położeniach lunety:
Odczyty: O
1
= 45
g
23
c
20
cc
O
2
= 245
g
23
c
80
cc
Odchyłka wynikające z błędu kolimacji wynosi:
g
cc
O2 O1
200
30
2
Jeżeli 2m (błędu pomiaru kąta) nie potrzeba
wykonywać rektyfikacji.

3.
Sprawdzenie warunku inklinacji
: Oś obrotu
lunety powinna być prostopadła do głównej osi
obrotu teodolitu (pp||vv).
Wpływ inklinacji na odczyt kierunku w teodolicie:
i
= i ctg(z)
Po wycelowaniu do wysoko położonego celu,
wykonujemy odczyty kątów w dwóch położeniach
lunety:
Odczyty: O
1
= 123
g
13
c
40
cc
O
2
= 323
g
14
c
60
cc
Odchyłka wynikające z błędu kolimacji wynosi:
i
=(O
2
- O
1
±200
g
)/2 = 60
cc
Jeżeli
i
2m (błędu pomiaru kąta) nie potrzeba
wykonywać rektyfikacji.
Średnia
z
odczytów
wykonanych
w
dwóch
położeniach lunety jest wolna od błędów kolimacji i
inklinacji.

4.
Sprawdzenie pionu optycznego
: Oś lunetki
powinna pokrywać się z główną osią obrotu
teodolitu (ss=vv).
Sprawdzenie wykonujemy w dwóch etapach:
• Pierwszym etapem jest pionowanie osi teodolitu
(vv).
• Na
arkuszu papieru
przypiętym do podłogi
znaczymy położenie celownika lunetki, po
ustawieniu tej lunetki nad każdą śrubą
ustawczą. Zaznaczone punkty wskazują skrajne
położenia osi pionownika. Właściwe, wolne od
błędu położenie wskaże środek trójkąta z trzech
położeń lunetki. Boki trójkąta nie powinny
przekraczać 2 mm.
• Rektyfikacja
polega na sprowadzeniu celownika
w polu widzenia lunetki na środek trójkąta za
pośrednictwem
śrub rektyfikacyjnych
. Jest to
zadanie trudne z uwagi na konieczność
ingerencji do wnętrza alhidady.
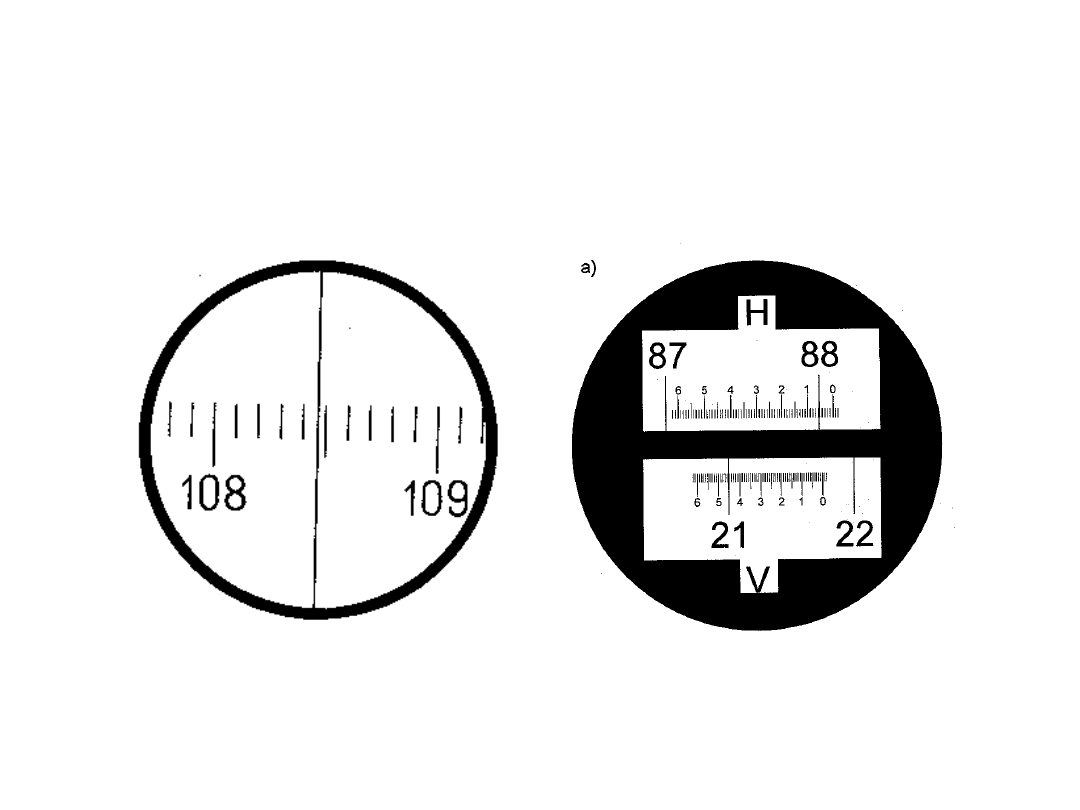
URZĄDZENIA ODCZYTOWE W
TEODOLITACH
ODCZYT
: 108
g
48
c
H: 87º 07´
V: 21º 46´

SYSTEM ODCZYTOWY W TEODOLICIE
ELEKTRONICZNYM

Metody pomiaru kątów poziomych
1. Kątowa
Każdy kąt
pomiędzy dwoma kierunkami na stanowisku
pomiarowym mierzy się
niezależnie
. Celujemy na cel po
lewej stronie, a następnie po prawej. Powtarzamy
czynności w drugim położeniu lunety teodolitu.
2. kierunkowa
Metoda kierunkowa
polega na celowaniu do kolejnych
punktów P1,P2,..., które wyznaczają pęk kierunków,
wychodzących ze stanowiska S i wykonaniu w I i II
położeniu lunety odczytów kierunków, kończąc
odczytem zamykającym (ponownie na punkt
wyjściowy). Odczyt początkowy i zamykający nie
powinny sie różnic od siebie o wartość ±2m (m -
dokładność pojedynczego odczytu)
Po obrocie lunety i alhidady do drugiego położenia,
rozpoczyna się druga półseria od ponownego
wycelowania do punktu początkowego.
Metody pomiaru kątów poziomych cd.
Wyniki pomiarów w metodzie kierunkowej sprowadza się do
określenia kierunków zredukowanych K1,K2,..., do celowej
punktu wyjściowego P1, dla której przypisuje się wartość
zerową.
Przykład obliczenia kierunków zredukowanych z metody
kierunkowej
Stanowisk
o
cel
odczyty podziałki w
I położ. II położ.
kierunki
zredukowane
2045
204
6
2
g
66.6
c
202
g
67.8
c
0
g
00.0
c
204
2
30
g
04.2
c
230
g
05.0
c
27
g
37.4
c
204
0
82
g
16.0
c
282
g
18.0
c
79
g
49.8
c
204
7
162
g
81.5
c
362
g
82.6
c
160
g
14.8
c
33
309
g
55.1
c
109
g
56.7
c
306
g
88.7
c
204
6
2
g
66.0
c
202
g
67.4
c
399
g
99.5
c

Metody pomiaru kątów poziomych cd.
Pomiary kątów poziomych często wykonuje się wielokrotnie w
celu zmniejszenia błędów. Pojedynczy pomiar nosi nazwę
serii
pomiaru
lub
poczetu
. Znane są
inne metody
stosowane w
pomiarach
precyzyjnych
m. in. Metoda Schreibera i metoda
sektorowa.
Dokładność pomiaru kątów poziomych.
Na błąd kątów mają wpływ systematyczne błędy
instrumentalne, czynności wykonawcy i metody pomiaru
(centrowanie i pionowanie osi, ustawienia sygnałów celu)
oraz działania środowiska (zmiany temperatury, oświetlenia,
ruch powietrza).
W literaturze wyróżniono błędy:
-centrowania,
-celowania,
-odczytu.

Dokładność pomiaru kątów poziomych cd.
Sprowadzając dokładność pomiaru wyłącznie do
błędów odczytu podziałki można przyjąć, że
błąd
kierunku m
o
=t/2
gdzie t-dokładność odczytu koła poziomego na
podziałce systemu odczytowego.
Błąd kąta jako błąd różnicy kierunków wg wzoru
Gaussa na błąd funkcji: (=K
2
– K
1
)
m
2
= 2m
2
o
= t
2
/2, m
= ± t/2
Błąd graniczny (3 m):
m
gr
= 3m
= ± 1.5 t
Dokładność odczytu t jest najczęściej przyjmowana
jako wartość
jednej działki podziału
w systemie
odczytowym, dla teodolitów technicznych będzie t =
1
c
, (1’) precyzyjnych t = 1
cc
, (1”).
Pomiar kątów pionowych
Kąty pionowe mierzy się
w płaszczyźnie pionowej
przechodzącej przez stanowisko pomiarowe i cel.
Jedno ramię kąta jest ustalone i powinno pokrywać
się z pionem miejsca obserwacji. Drugie ramię
wyznacza oś celowa w momencie obserwacji. Na
podziałce kątowej rejestruje się tylko odczyt dla
drugiego ramienia kąta. Dla pierwszego ramienia
przypisana jest zerowa wartość.
Niedokładności konstrukcyjne teodolitu powodują
wystąpienie systematycznego
błędu miejsca zera
(MO)
.
Wartość błędu miejsca zera można wyznaczyć z
pomiaru w dwóch położeniach lunety:
Odczyty: V
1
= 93
g
63.4
c
V
2
= 306
g
34.2
c
MO = (V
1
+ V
2
- 400
g
)/2 = (399
g
97.6
c
-400
g
)/2 = 1.2
c

Pomiar kątów pionowych cd.
Kąty pionowe obliczany z odczytów podziałki koła
pionowego:
z =
V
1
– MO z = 400
g
–
(V
2
- MO)
2 z = V
1
– MO + 400
g
–
(V
2
- MO)
z = (V
1
– V
2
+ 400
g
)/2,
=100
g
-
z
Średni kąt obliczony z pomiarów wykonanych w
dwóch położeniach lunety jest wolny od błędu
miejsca zera.
Kąty pionowe są mierzone dla rozwiązania różnych
zadań:
-niwelacja trygonometryczna,
-przestrzenne wcięcie w przód,
-tachimetria

Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
Wyszukiwarka
Podobne podstrony:
Geodezja wykład 5 pomiary liniowe i pomiary kątowe (04 04 2011)
Geodezja wykład 5 pomiary liniowe i pomiary kątowe (04 04 2011)(1)
TBL WYKŁAD III Freud
wykład III Ubezpieczenia na życie2011
wykład III pns psychopatologia
WYKLAD III diagnoza psychologiczna
MAKROEKONOMIA WYKŁAD III
Zarzadzanie strategiczne w organizacjach publicznych wyklad III listopad 2010
FARMAKOLOGIA WYKŁAD III RAT MED ST
FPP wykład III
wykład III bud ciało i szybkość
BHP - wykład III - biomechanika, materiauy
Wyklad 8, III rok, Diagnostyka laboratoryjna, Wykłady diagnostyka
wyklad III- uklad wydalniczy, Biologia, zoologia
więcej podobnych podstron