PODSTAWY TEORII STANU NAPRĘŻENIA
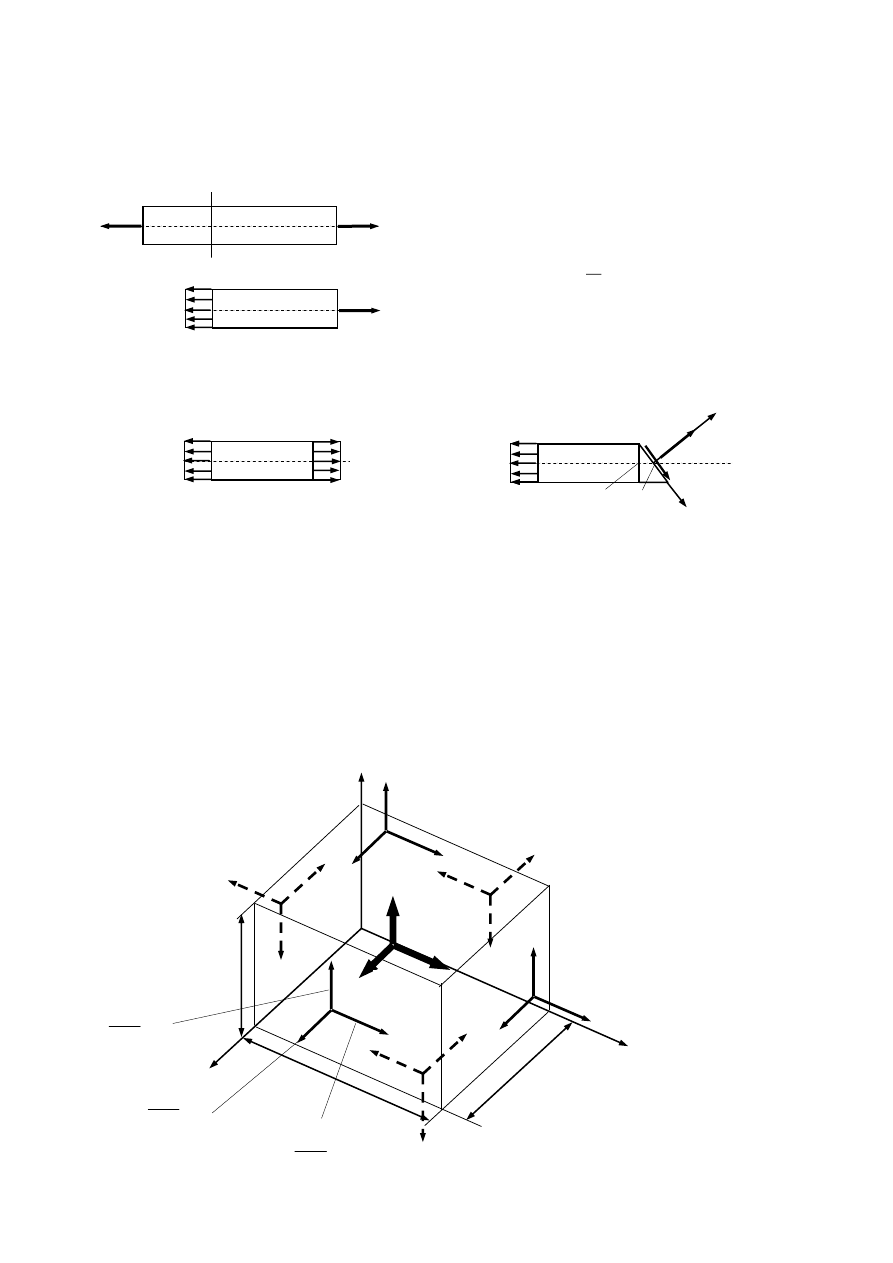
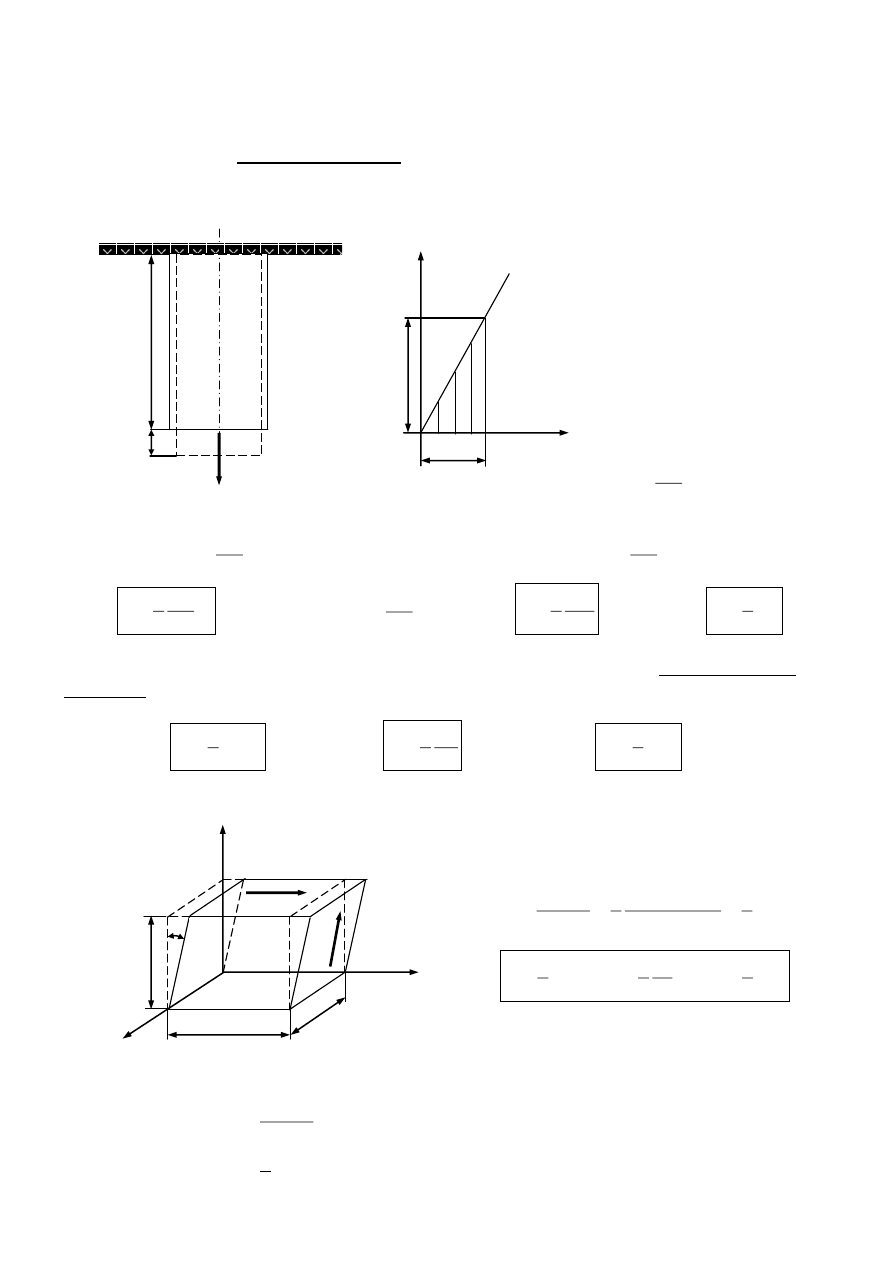
1. Stan naprężenia przy jednoosiowym rozciąganiu (stan jednorodny)
Przez każdy punkt pręta można przeprowadzić nieskończoną liczbę przekrojów pod różnymi
kątami do jego osi i każdemu przekrojowi odpowiada inne naprężenie.
W przekroju prostopadłym
A
P
x
Wytnijmy z pręta element dwoma przekrojami prostopadłymi i przetnijmy go pod kątem
do
przekroju prostopadłego.
Ułóżmy równania równowagi:
P
n
=
A -
x
A cos
cos
= 0
=
x
cos
2
P
t
=
A -
x
A cos
sin
= 0
=
x
sin
cos
= ½
x
sin2
max
= 0
=
x
max
= 45
= ½
x
2. Równania równowagi wewnętrznej
W przypadku niejednorodnego stanu naprężenia, wartości składowych naprężeń zmieniają
si
ę ze zmiana położenia.
Rozpatrzmy prostopadłościan o krawędziach dx, dy, dz będący w równowadze
Znaki naprężeń:
-
rozciągające ( + )
ściskające ( – )
xy
– x –wskazuje oś
y -
wskazuje oś II
X, Y, Z
– siły masowe
x
,
xy
,
xz
– naprężenia na
ściance
do osi x
naprężenia na ściance przesuniętej o dx.
P
P
B
B
P
x
x
x
x
x
t
Aco
s
A
n
dz
dx
dy
z
x
y
X
Y
Z
x
y
z
xy
xz
zx
zy
yz
yx
dx
x
xz
xz
dx
x
x
x
dx
x
xy
xy
Pisząc równania równowagi (sumy rzutów wszystkich sił na poszczególne osie)
0
)
(
)
(
)
(
Xdxdydz
dxdy
dxdy
dz
z
dxdz
dydz
dx
y
dydz
dydz
dx
x
X
zx
zx
zx
yx
yz
yz
x
x
x
podobnie
0
Y
i
0
Z
po uporządkowaniu i uproszczeniu otrzymamy układ równań:
0
X
z
y
x
zx
yx
x
0
Y
z
y
x
zy
y
xy
są to równania równowagi wewnętrznej
0
Z
z
y
x
z
zx
xz
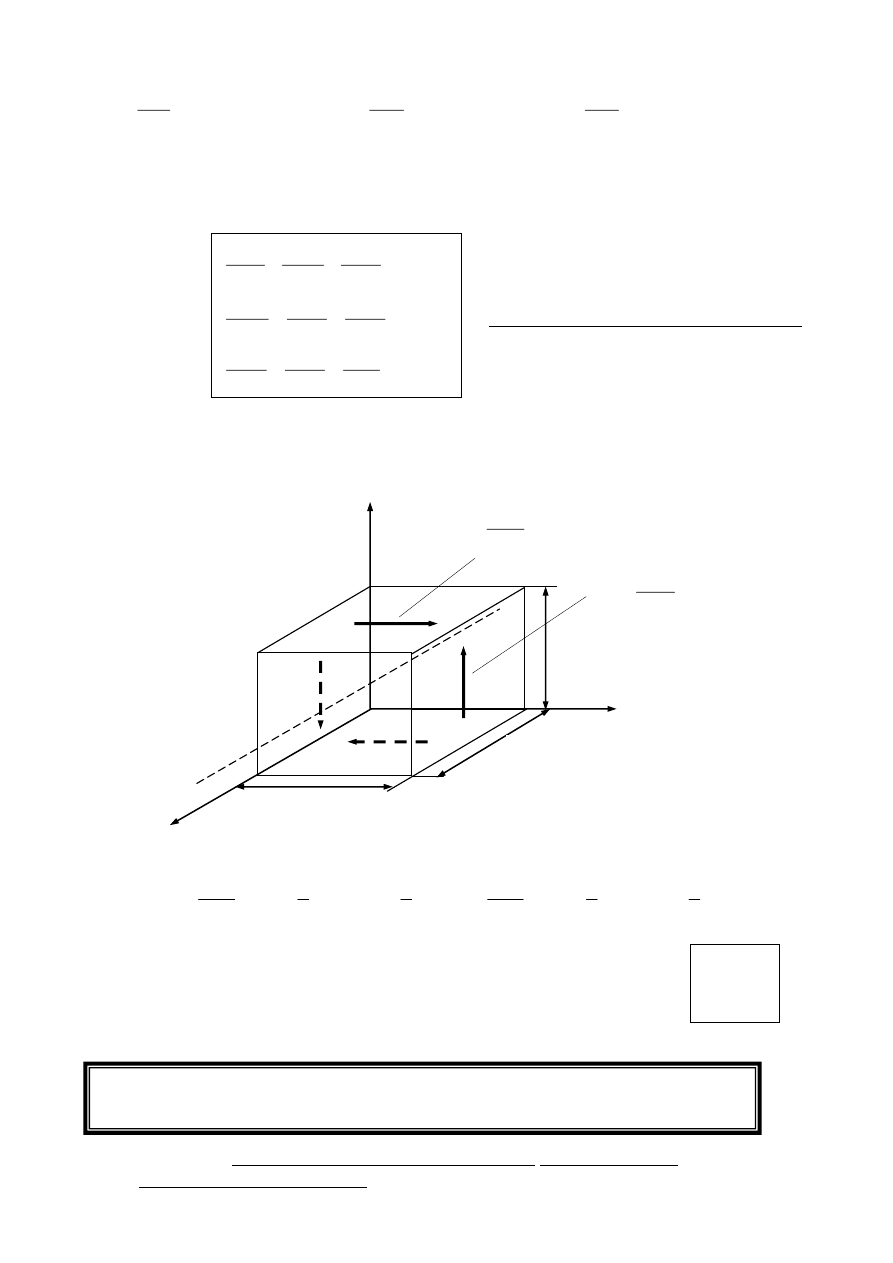
3. Twierdzenie o wzajemności naprężeń stycznych
Wykorzystamy pozostałe równania równowagi – równania momentów
0
2
1
2
1
)
(
2
1
2
1
)
(
'
dz
dxdy
dz
dxdy
dz
z
dy
dzdx
dy
dxdz
dy
y
M
zy
zy
zy
yz
yz
yz
x
po uproszczeniu i pominięciu wyrażeń małych wyższego rzędu otrzymamy:
yz
=
zy
z pozostałych równań momentów mamy
xz
=
zx
yx
=
xy
słownie tzw. aksjomat Boltzmanna brzmi:
„Składowe naprężeń stycznych prostopadłe do krawędzi przecięcia się dwóch
przekrojów elementarnych wzajemnie prostopadłych są zawsze równe”
Mamy zatem w
układzie przestrzennym 6 składowych stanu naprężenia,
a w
układzie płaskim 3 składowe -
x
,
y
i
xy
=
yx
z
y
x’
x
dy
dx
dz
zy
yz
dz
z
zy
zy
dy
y
yz
yz
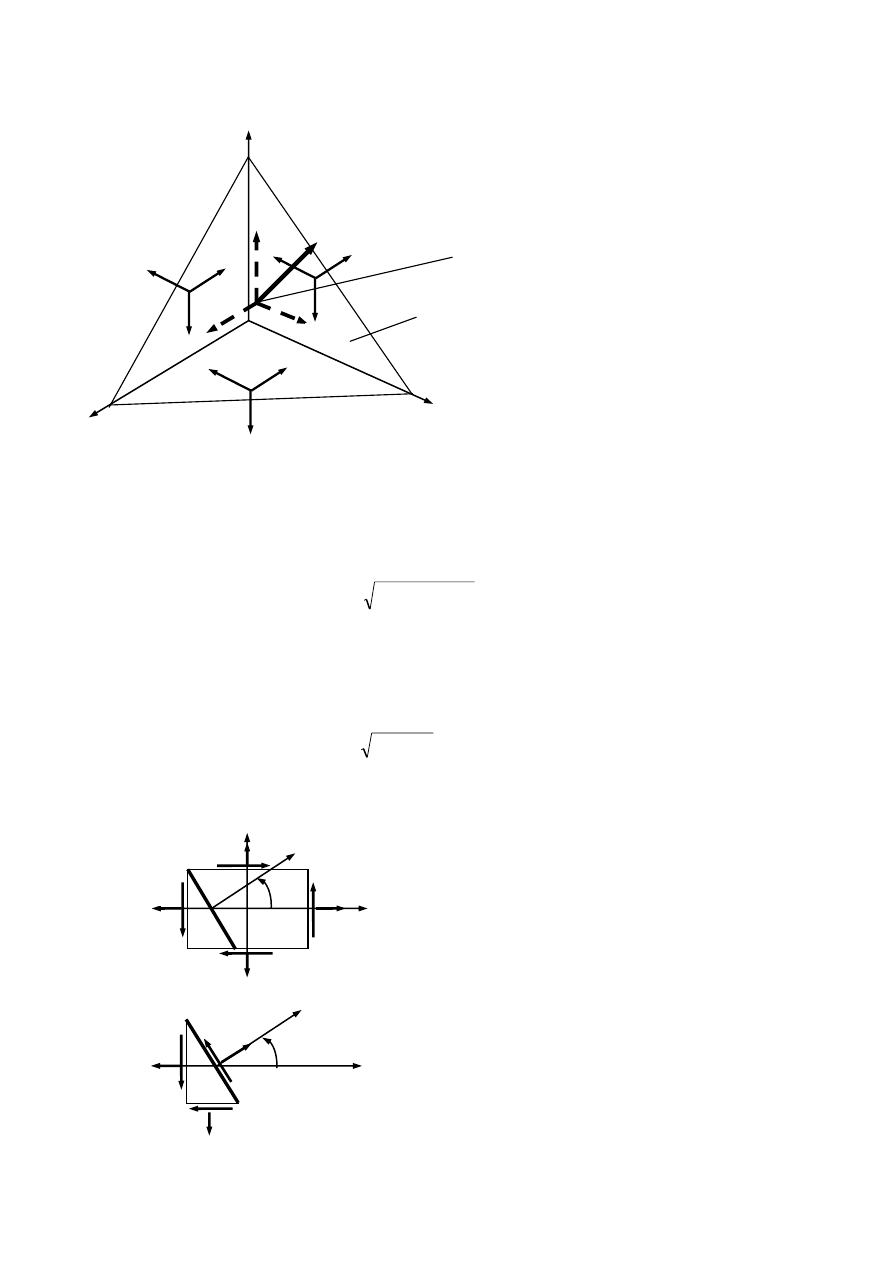
4. Warunki powierzchniowe
– naprężenia w punkcie zależnie od orientacji przekroju.
Rozpatrzmy równowagę czworościanu pod wpływem sił powierzchniowych.
Znamy w punkcie 0 naprężenia w
trzech wzajemnie prostopadłych
przekrojach.
Chcemy wyznaczyć naprężenia w
tym punkcie w przekroju o kierunku
określonym osią normalną o
cosinusach kierunkowych:
l = cos(
x), m = cos(
y), n = cos(
z),
Z sumy rzutów otrzymamy;
0
dA
p
dA
dA
dA
Y
y
z
zy
x
xy
y
y
podobnie:
0
0
X
i
Z
p
x
=
x
l +
yx
m +
zx
n
p
y
=
xy
l +
y
m +
zy
n
p
z
=
xz
l +
yz
m +
z
n
Całkowite naprężenie:
2
2
2
z
y
x
p
p
p
p
Naprężenie normalne
n
p
m
p
l
p
z
y
x
a po rozwinięciu i uporządkowaniu i wykorzystaniu postulatu Boltzmanna:
nl
mn
lm
n
m
l
zx
yz
xy
z
y
x
2
2
2
2
2
2
naprężenie styczne
2
2
p
Transformacja składowych płaskiego stanu naprężenia
Rozpatrzmy cienką płaska tarczę poddaną działaniu naprężeń:
x
,
y
i
xy
=
yx
.
Przyjmijmy grubość tarczy równą 1.
Poprowadźmy myślowy przekrój pod
kątem
do kierunku osi x.
Niech powierzchnia przekroju wynosi A
zatem
A
x
= A
cos
; A
y
= A
sin
;
Odrzućmy część prawą i rozpatrzmy
równowagę pozostałej (lewej) części elementu.
F
=
A -
x
A
cos
cos
-
y
A
sin
sin
-
xy
A
cos
sin
-
xy
A
sin
cos
= 0
F
+90
=
A +
x
A
cos
sin
-
y
A
sin
cos
+
xy
A
sin
sin
-
xy
A
cos
cos
= 0
dA
y
x
z
x
xy
P
P
z
P
y
P
x
0
yx
yz
zy
zx
y
z
xz
x
x
n
]
n
n
]
n
x
xy
x
xy
yx
y
]
n
y
y
xy
x
yx
y
po uporządkowaniu otrzymamy:
=
x
cos
2
+
y
sin
2
+ 2
xy
sin
cos
= - (
x
-
y
) sin
cos
+
xy
(cos
2
- sin
2
)
lub po wprowadzeniu kąta podwójnego 2
:
= ½(
x
+
y
) + ½(
x
-
y
) cos2
+
xy
sin2
=
x
cos
2
+
y
sin
2
+
xy
sin2
wzory transformacyjne
= -
½ (
x
-
y
) sin2
+
xy
cos2
:
- Naprężenia główne – ekstremalne wartości naprężeń normalnych dla których
= 0,
- Płaszczyzny główne – płaszczyzny na których działają naprężenia główne,
- Osie główne (kierunki główne) – normalne do płaszczyzn głównych
Położenie kierunków głównych wyznaczymy z
= 0 lub z d
/d
=0
)
(
2
2
tg
y
x
xy
1
i
1
+90
a ich wartość ze wzoru
2
2
2
,
1
4
)
(
2
1
)
(
2
1
xy
y
x
y
x
1
=
max
,
2
=
min
,
(
3
= o)
Ekstremalne naprężenia styczne występują w przekrojach obróconych względem
przekrojów głównych o kąt 45
, a ich wartość wynosi:
2
2
min
max,
4
)
(
2
1
xy
y
x
lub
2
2
1
max
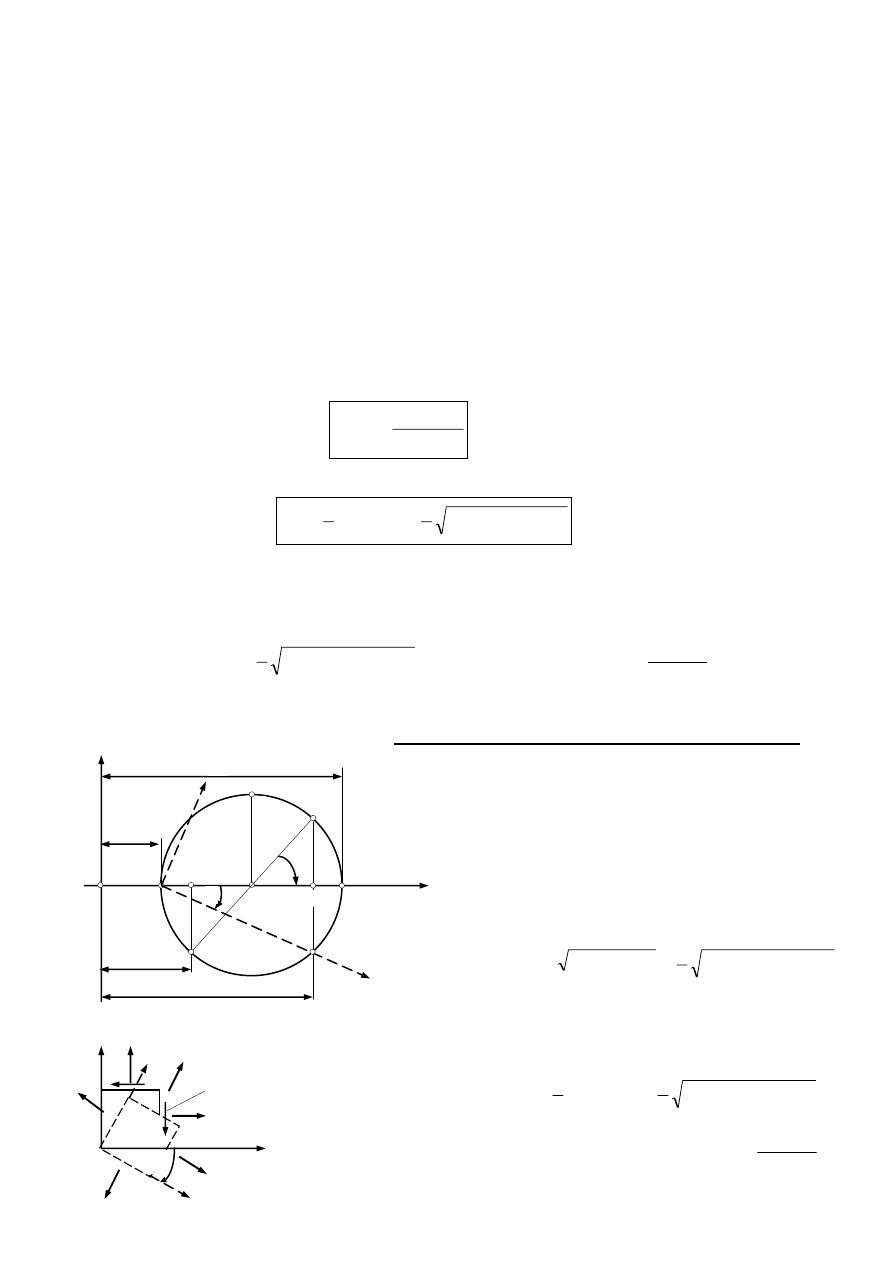
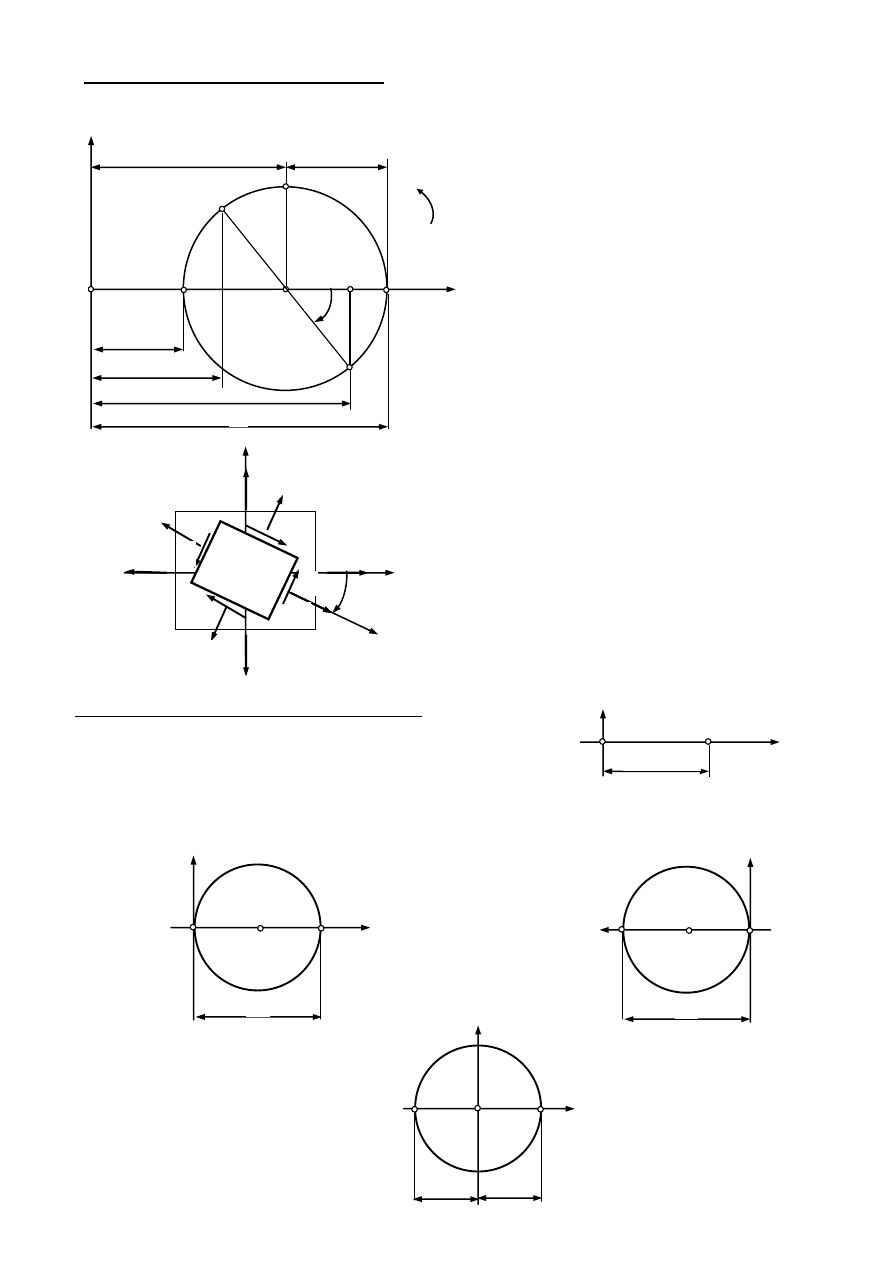
Koło Mohra i jego zastosowanie do transformacji składowych płaskiego stanu naprężenia
I. Dane
x
,
y
i
xy
,
x
>
y
,
xy
>0,
-
szukamy kierunków głównych i naprężeń głównych
1. Rysujemy osie
i
.
2.
Na osi poziomej odkładamy:
x
= 0A,
y
= 0B,
3.
Wyznaczamy środek koła:
0S = ½(0A+0B) = ½(
x
+
y
)
4. Zaznaczamy odcinek AC=
xy
5.
Promieniem SC kreślimy koło
2
2
2
2
4
)
(
2
1
xy
y
x
AC
SA
SC
6.
Kierunki główne określa kąt 2
0
zawarty
między osią
a SC.
7.
Naprężenie główne
1
=0S+SF
2
2
1
4
)
(
2
1
)
(
2
1
xy
y
x
y
x
2
=0S
–SE
2
2
1
max
SG
y
x
2
1
2
xy
max
2
0
E
B
S
A
C
G
F
1
xy
x
y
2
2
1
2
1
1
x
y
0
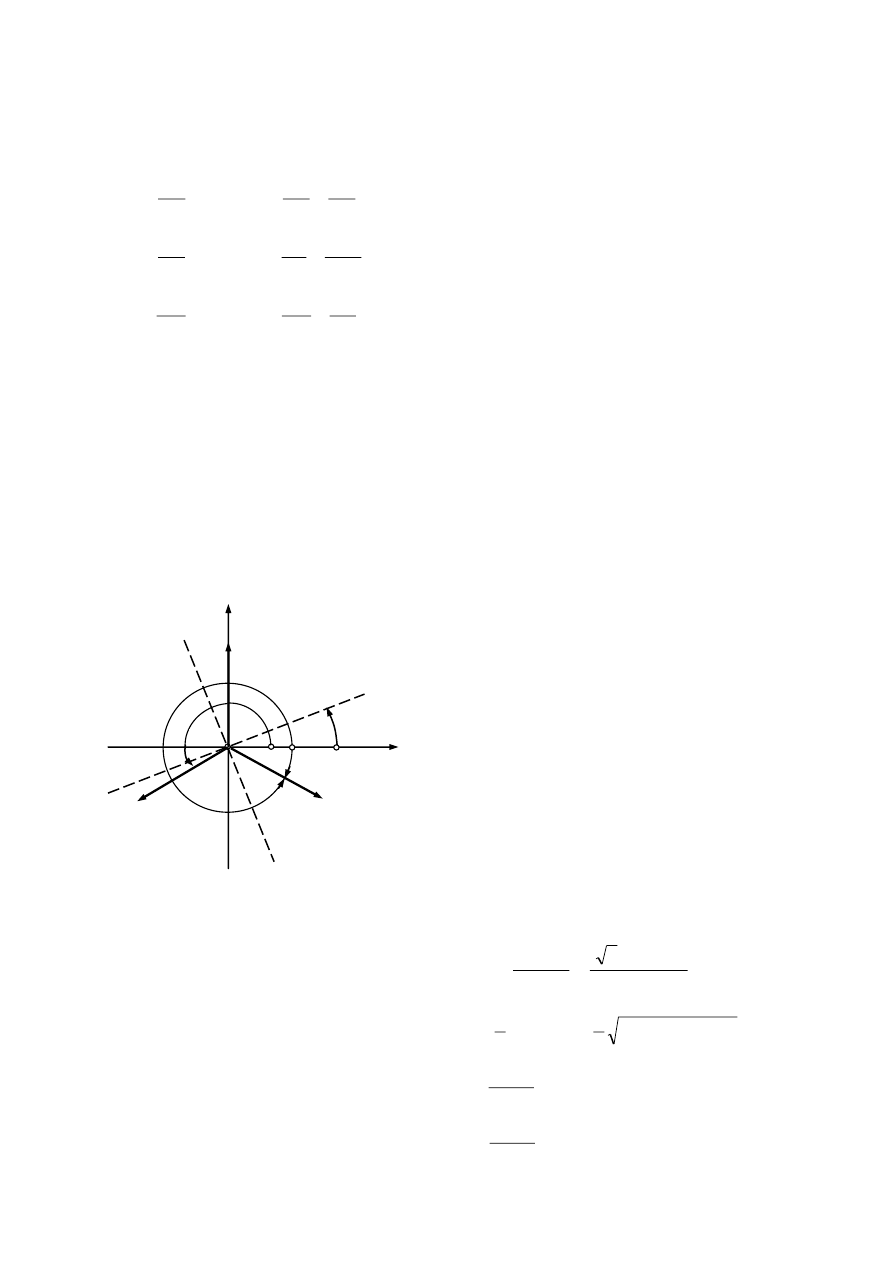
II. Transformacja z kie
runków głównych.
Dane
1
>
2
> 0, oraz ich położenie - szukamy naprężeń w dowolnym przekroju
.
Odkładamy
1
= 0A,
2
= 0B
Znajdujemy środek koła:
0S = ½(
1
+
2
)
i promieniem
SA = ½(
1
-
2
)
kreślimy koło.
Odmierzamy od promienia SA kąt 2
i ze
środka S prowadzimy prostą do
przecięcia się z kołem (D).
Przykłady szczególnych stanów naprężenia
1.
Równomierne rozciąganie
1
=
2
=
3
>0
2.
Płaskie równomierne rozciąganie
1
=
2
> 0
3
=0
3.
Jednoosiowe rozciąganie (ściskanie)
4.
Płaskie ścinanie
1
= -
2
2
+90
1
A
R
T
P
S
B
0
½(
1
+
2
)
½(
1
-
2
)
-2
+
-
2
+90
1
1
1
1
2
2
+90
+90
+90
S
1
=
2
=
3
S
1
S
2
1
>0
2
=0
1
=0
2
<0
S
2
1
PODSTAWY TEORII STANU ODKSZTAŁCENIA
Warunki geometryczne
– związki przemieszczeń i odkształceń.
Jeżeli przez u, v, w oznaczymy składowe przemieszczenia dowolnego punktu w kierunkach osi
x, y, z, to
,
-
składowe stanu odkształcenia wynoszą:
x
v
y
u
x
u
xy
x
-
wydłużenie właściwe
xy
vw
z
v
y
v
yz
y
-
odkształcenie poprzeczne
z
u
x
w
z
w
zx
z
(kąt odkształcenia postaciowego)
Transformacja składowych płaskiego stanu odkształcenia
Zależności opisujące transformacje odkształceń mają taką samą postać jak zależności
opisujące transformację naprężeń, jeżeli dokona się zamiany wielkości:
½
Przykład Stan określono trzema wydłużeniami
a
,
b
,
c
na powier
zchni ciała mierzonymi w
kierunkach trzech osi a, b, c, nachylonych wzajemnie pod kątem ⅔
. Wyznaczyć
składowe stanu odkształcenia
x
,
y
,
xy
w prostokątnym układzie osi x, y (y=a),
kierunki główne i odkształcenia główne, a także wartości naprężeń głównych
1
,
2
.
a
=
y
c
= ½(
x
+
y
)+½(
x
-
y
)cos2 210°+½
xy
sin2 210°
b
= ½(
x
+
y
)+½(
x
-
y
)cos2(-
30°)+½
xy
sin2(-
30°)
cos420°=cos(2
+60°)=½
sin420°=sin(2
+60°)=√3/2
cos(-
60°)= cos(60°)=½
sin(-
60°)= -sin(60°)=-√3/2
c
= ½(
x
+
y
) + ½(
x
-
y
) ½ + ½
xy
√3/2
b
= ½(
x
+
y
) + ½(
x
-
y
) ½ - ½
xy
√3/2
x
= ⅓(-
a
+2
b
+2
c
xy
= ⅔√3(
c
-
b
)
położenie kierunków głównych
c
b
a
c
b
y
x
xy
tg
2
)
(
3
2
0
odkształcenia główne
2
2
2
,
1
)
(
2
1
)
(
2
1
xy
y
x
y
x
naprężenia główne
)
(
1
2
1
2
1
E
)
(
1
1
2
2
2
E
kier. główne
y
x
a
b
c
210
330
-30
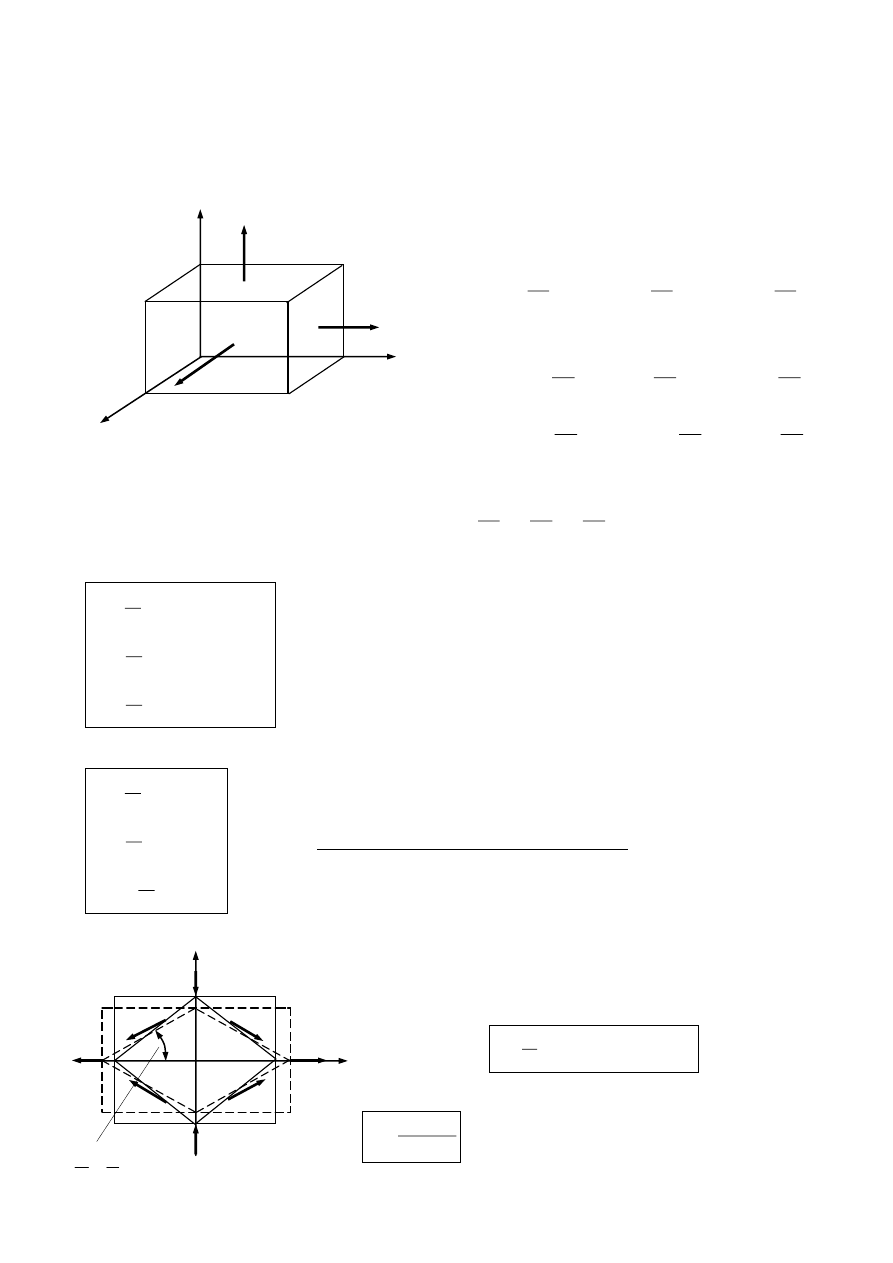
Uogólnione prawo Hooke’a – określa związki miedzy składowymi stanu naprężenia i stanu
odkształcenia dla dowolnego przestrzennego stanu.
Rozpatrzmy jednostkowy sześcian na który działają naprężenia główne
1
,
2
,
3
.
Korzystając z zasady superpozycji rozkładamy
ten stan na trzy stany proste.
Gdy działa tylko
1
(
2
=
3
=0) to odkształcenia:
E
E
E
1
'
3
1
'
2
1
'
1
;
;
podobnie:
E
E
E
2
'
3
2
'
2
2
'
'
1
;
;
i
E
E
E
3
'
3
3
'
2
3
'
'
'
1
;
;
Całkowite odkształcenie względne w kierunku osi 1 wyznaczymy:
E
E
E
3
2
1
'
'
'
1
'
'
1
'
1
1
analogiczni
e wyznaczając wydłużenia w kierunku 2 i 3 otrzymamy:
)
(
1
)
(
1
)
(
1
1
2
3
3
3
1
2
2
3
2
1
1
E
E
E
-
uogólnione prawo Hooke’a dla przestrzennego stanu naprężenia
dla płaskiego stanu naprężenia (
3
=0):
1
2
3
1
2
2
2
1
1
1
1
E
E
E
-
mamy przestrzenny stan odkształcenia
Zal
eżność między kątem odkształcenia postaciowego a naprężeniem stycznym
Możemy ją uzyskać rozpatrując odkształcenia
elementu znajdującego sie w stanie czystego
ścinania
=
G
G
lub
jest to prawo Hooke’a dla czystego ścinania
)
1
(
2
E
G
moduł sprężystości postaciowej (Kirchhoffa)
ponieważ 0<
<0,5
E/3
G
E/2 dla stali G
0,4E
2
1
3
2
1
3
2
4
1
2
2
=-
1
=
W przypadku trójwymiarowego stanu naprężenia określonego przez
x
,
y
,
z
,
xy
,
yz
,
zx
przestrzenny stan odkształcenia jest opisany przez 9 wielkości:
x
,
y
,
z
,
xy
,
yx
,
xz
,
zx
,
yz
,
zy
, lecz wobec
ij
,
ji
,
przestrzenny stan odkształcenia określa 6 składowych:
x
,
y
,
z
,
xy
,
xz
,
yz
,
oraz
G
E
G
E
G
E
zx
zx
x
y
z
z
yz
yz
z
x
y
y
xy
xy
z
y
x
x
)
(
1
)
(
1
)
(
1
-
uogólnione prawo Hooke’a
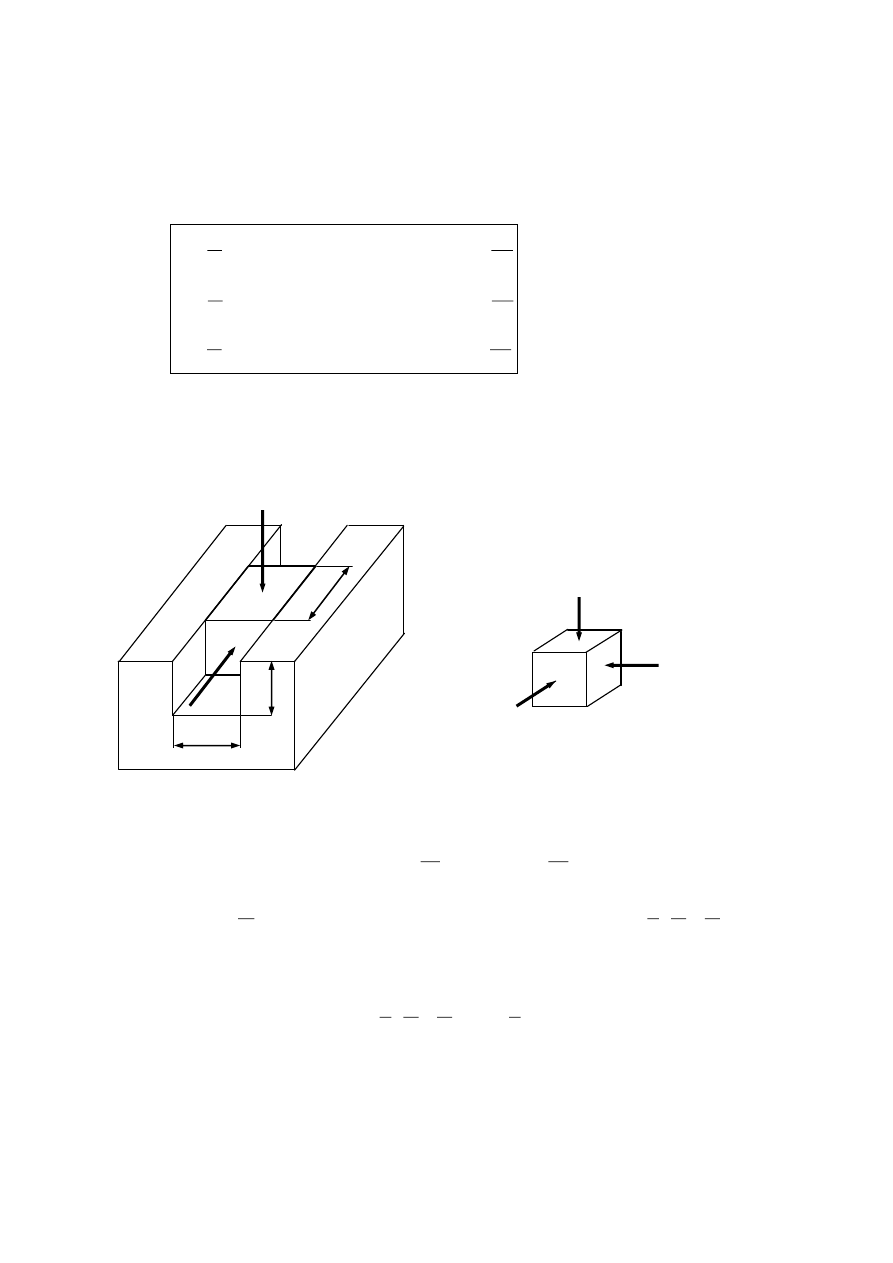
Przykład Wyznaczyć siłę z jaką prostopadłościan abc oddziaływuje na boczne ściany
kanału płyty doskonale sztywnej. Prostopadłościan mieści się w kanale bez luzu i
wcisku. Dane: P, Q, a, b, c,
.
Prostopadłościan znajduje się w
przestrzennym stanie naprężenia
1
0
2
0
3
0
i w płaskim stanie odkształcenia
1
0
2
0
3
0
Naprężenia składowe:
ab
Q
ac
P
3
1
b
Q
c
P
a
E
)
(
)
(
1
0
1
3
2
1
3
2
2
Siła naporu prostopadłościanu na boczne ścianki płyty:
)
(
2
Qc
Pb
a
bc
b
Q
c
P
a
bc
R
c
P
Q
a
b
3
1
2
Energia sprężysta
Ważną własnością materiału jest zdolność gromadzenia w odkształconym sprężyście ciele
energii sprężystej, w którą przemienia się praca sił zewnętrznych L obciążających ciało.
Określa się ją jako energię sprężystości.
Obliczmy energię sprężystą pręta rozciągniętego siłą P o wydłużeniu
.
L
– praca sił zewnętrznych
V
– energia sprężysta
Praca elementarna
dL = P d
podstawiając:
V
L
i
l
EA
P
otrzymamy:
d
l
EA
dV
po scałkowaniu
0
d
l
EA
V
2
2
1
l
EA
V
podstawiając
EA
Pl
mamy
EA
l
P
V
2
2
1
lub
P
V
2
1
Dzieląc całkowita energię sprężystą V przez objętość pręta A
l otrzymamy
właściwą energię
sprężystą
dla stanu jednoosiowego:
2
2
1
E
E
2
2
1
2
1
obliczmy energie sprężystą ścinania
siła -
zy
dydx
przesunięcie BB’ -
yz
dz
zy
zy
yz
zy
dxdydz
dz
dydx
dxdydz
V
2
1
2
1
2
2
2
1
2
1
2
1
G
G
W przypadku ogólnego stanu naprężenia:
dL = ½(
x
dydz
x
dx+
y
dxdz
y
dy+
z
dxdy
x
dz+
xy
dydz
xy
dx+
yz
dzdx
yz
dy+
zx
dxdy
zx
dz)
dxdydz
dL
zx
zx
yz
yz
xy
xy
z
z
y
y
x
x
2
1
P
P
l
P
y
z
x
zy
zx
d
y
dx
dz
B
B’
yz
Wyszukiwarka
Podobne podstrony:
Analiza plaskiego stanu napreze Nieznany
podstawy teorii informacji E5X5 Nieznany
,podstawy teorii automatow, opr Nieznany
Podstawy teorii Elliota Podstaw Nieznany (2)
10 Analiza stanu naprężenia pojęcia podstawowe
3 Podstawy teorii SJLM cd id 33 Nieznany (2)
Badanie stanu naprezen w cienko Nieznany (2)
Podstawy teorii Elliota Podstaw Nieznany
2 Podstawy teorii SJLM cdid 206 Nieznany (2)
PODSTAWY TEORII ORGANIZACJI I ZARZĄDZANIA Konwersatorium 1
podstawy teorii przedsiębiorstwa zaoczni
Podstawy Teorii Okretow Pytania nr 4 (20) id 368475
więcej podobnych podstron