19
KLOCKI ELEKTRONICZNE
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
ELEKTRONIKA DLA WSZYSTKICH 3/96
Założenia projektu
Jak zwykle przed rozpoczęciem pro−
jektowania urządzenia trzeba zdefinio−
wać wymagania jakie ma ono spełniać.
Projektowany układ do sterowania pano−
ramicznym ruchem kamery winien speł−
niać pięć następujących podstawowych
wymagań:
1. kątową pozycją kamery ma sterować
silnik z przekładnią,
2. kamera ma poruszać się w sposób
ciągły w granicach kontrolowanych
przez układ,
3. kątowe granice oraz szybkość ruchu
kamery są sterowane przez układ,
4. jeden mikrowyłącznik wyznacza śro−
dek kąta panoramowania,
5. układ jest zasilany napięciem stałym
12V.
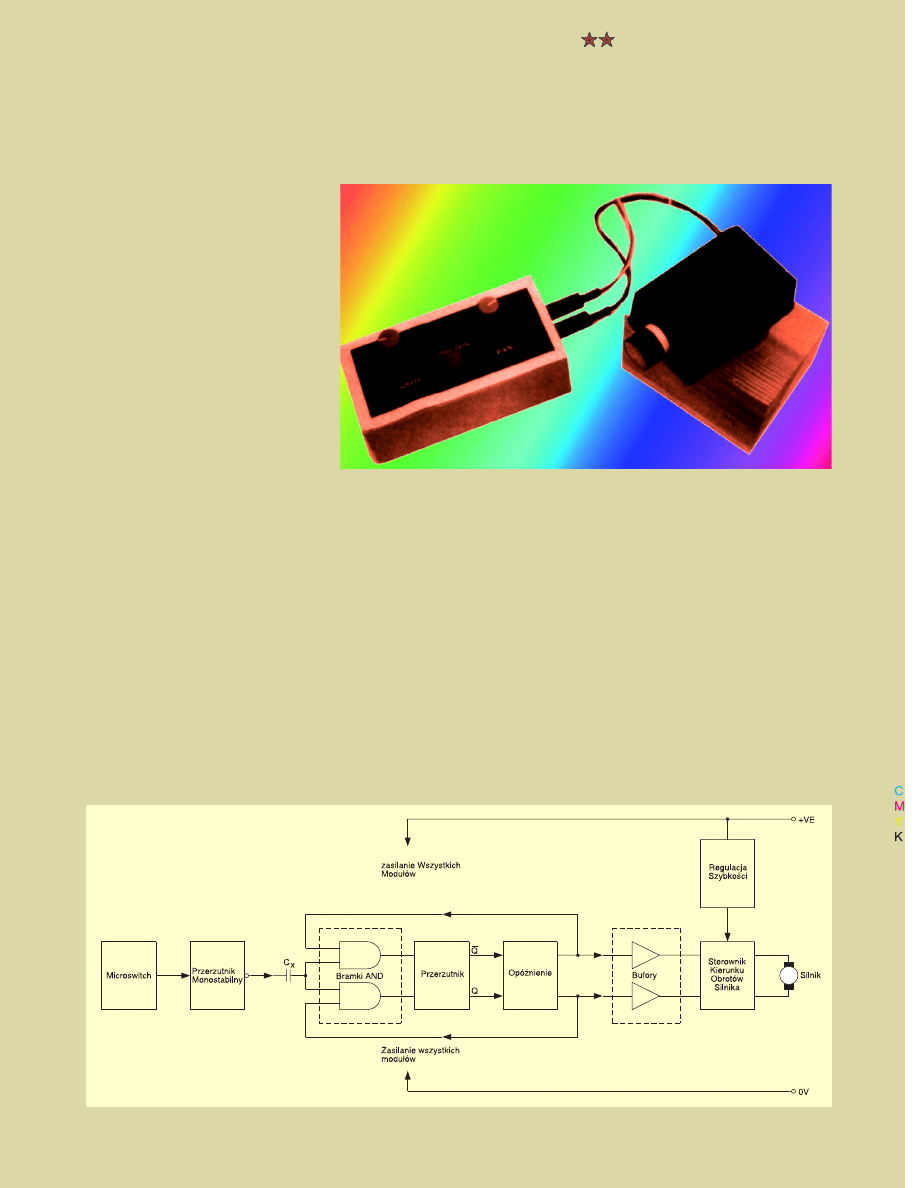
Schemat blokowy
Po ustaleniu założeń projektu, można
przystąpić do sporządzenia schematu
blokowego układu. Jest on przedstawiony
na rys. 1. Aby schemat ten stał się zrozu−
miały, trzeba najpierw omówić wymaga−
nia samego silnika i odwracalności jego
obrotów.
Zastosowano silnik prądu stałego, po−
nieważ łatwo daje się odwracać kierunek
jego obrotów przez odwracanie polaryza−
cji zasilania. Napięcie zasilające jest do−
prowadzane do silnika za pośrednictwem
modułu regulatora szybkości obrotów.
AUTOMATYCZNY SYSTEM
PANORAMOWANIA
KAMERą
Budowa automatycznego systemu
panoramowania kamerą, który
rozszerza obszar przez nią
nadzorowany, ilustruje sposób
wykorzystania modułów
przedstawionych w trzecim artykule z
serii „Klocków elektrycznych".
Artykuł niniejszy przedstawia sposób,
w jaki można opisane moduły dobrać i
zestawić w działające urządzenie. Tym
razem będzie to układ do poruszania
kamerą systemu nadzorującego w
panoramicznym obszarze obserwacji.
Szybkość oraz zakres jej ruchu
kątowego dają się sterować przez układ,
dzięki czemu system nabiera
szczególnej przydatności do zdalnej
obserwacji. Zakres ruchu kamery jest
wyznaczony jednym tylko wyłącznikiem.
Układ ten nadaje się do wszelkich
urządzeń wymagających sterowanego
odwracania kierunku ruchu.
W niniejszym artykule wzmianki o
oznaczeniach w rodzaju rys. 3.1 czy rys.
3.2 odnoszą się do rysunków
zamieszczonych poprzednim artykule.
Natomiast rysunki oznaczone rys. 1 lub
rys. 2 są rysunkami tego artykułu.
Rys. 1 Schemat blokowy automatycznego systemu panoramowania kamerą.
Układ sterujący i makieta kamery na silniku panoramowania.
2 0
KLOCKI ELEKTRONICZNE
ELEKTRONIKA DLA WSZYSTKICH 3/96
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
Bardzo ważną rolę pełni układ opóź−
niający, zatrzymujący silnik na krótką
chwilę przed odwróceniem kierunku obro−
tów i uniemożliwiający w ten sposób gwał−
towną ich zmianę. Moduł opóźnienia jest
zaopatrzony w bufor, którego zadaniem
jest dostarczanie do układu odwracania
kierunku obrotów czystych, nie zakłóco−
nych, poziomów logicznych. Kierunek ob−
rotów silnika jest wyznaczony przez stan
przerzutnika. Sprzężenie zwrotne z wyjść
układu opóźniającego jest doprowadzone
do odpowiednich wejść przerzutnika za
pośrednictwem bramek AND.
Z analizy przerzutnika z bramek NOR
na rys. 3.11 wynika, że dodatni impuls do−
prowadzony do wejścia ustawiającego
(S) wywołuje zatrzaśnięcie wyjścia nieod−
wracającego (Q) na poziomie wysokim.
Zaś dodatni impuls doprowadzony do we−
jścia kasującego (R) wywołuje zatrzaś−
nięcie wyjścia odwracającego (nie−Q,
czyli Q\) na poziomie wysokim. W rezulta−
cie każdy dodatni impuls doprowadzony
wspólnie do drugich wejść bramek AND
wywoła wzajemną zamianę stanów wyjść
Q i Q\.
Impuls wyzwalający
Działanie systemu jest poprawne, gdy
impuls dochodzący do wspólnego we−
jścia bramek AND jest krótki. Szeregowy
kondensator Cx na rys. 1 (sprzężenie
zmiennoprądowe) zapewnia dotrzymanie
tego warunku. Zmiany poziomów logicz−
nych wyjść nie mogą zachodzić zbyt szy−
bko, więc sygnały sprzężenia zwrotnego
do bramek AND są pobierane za moduła−
mi opóźnienia.
Jak widać na schemacie na rys. 1,
kontrolę całego układu w czasie, a zatem
zakres obrotu kamery, sprawuje przerzut−
nik monostabilny. W centralnym punkcie
ruchu kamery jest uruchamiany mikrowy−
łącznik, który wyzwala przerzutnik mono−
stabilny. Różne rodzaje takich przerzutni−
ków zostały opisane w części 2 "Klocków
Elektronicznych".
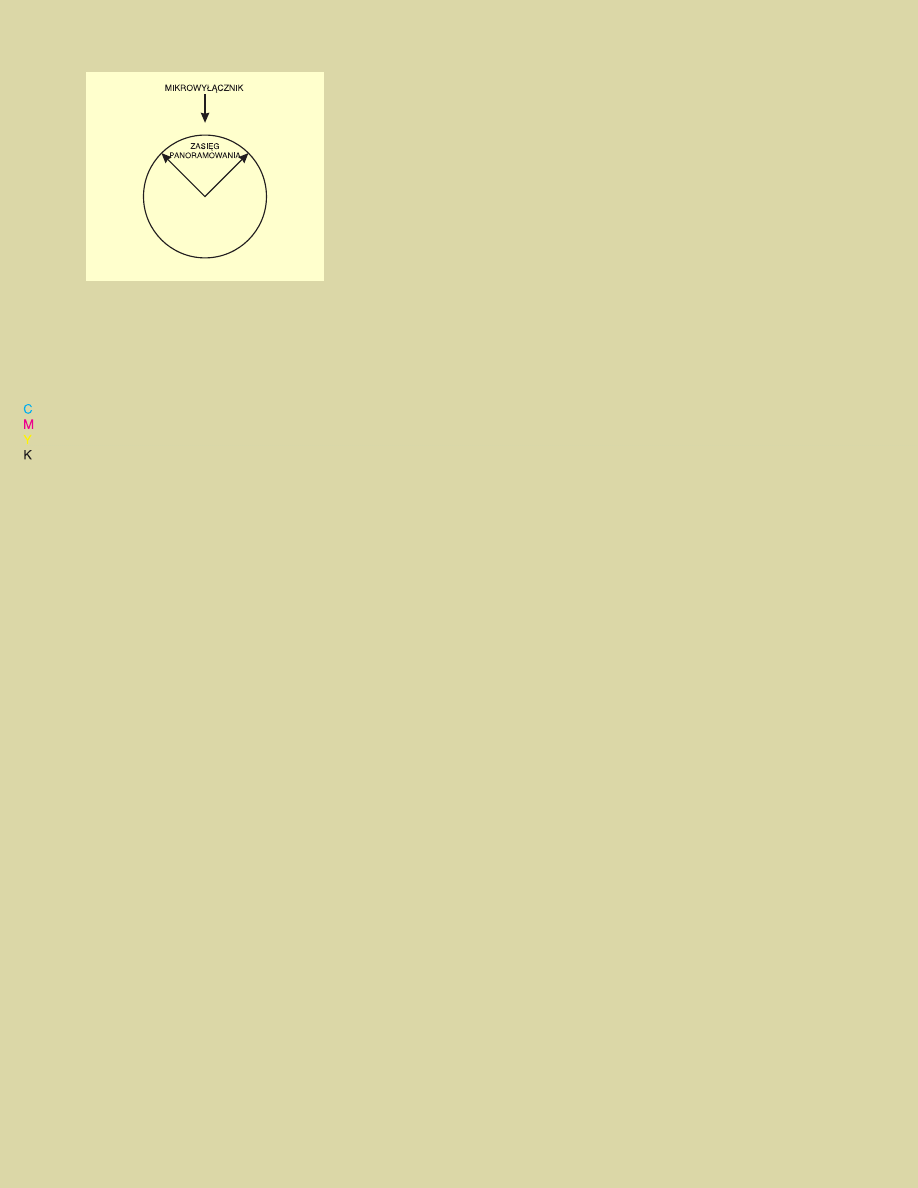
Długość impulsu przerzutnika mo−
nostabilnego wyznacza czas, w któ−
rym kamera obraca się w jednym kie−
runku, poczynając od momentu uru−
chomienia mikrowyłącznika. Im ten
czas jest dłuższy, tym szerszy jest kąt
panoramowania kamery, jak ilustruje
rys. 2. Oznacza to, że kąt obserwacji
kamery jest kontrolowany w pełni
przez układ, a nie przez pozornie
prostszy zespół dwóch wyłączników
wmontowanych w podstawę kamery.
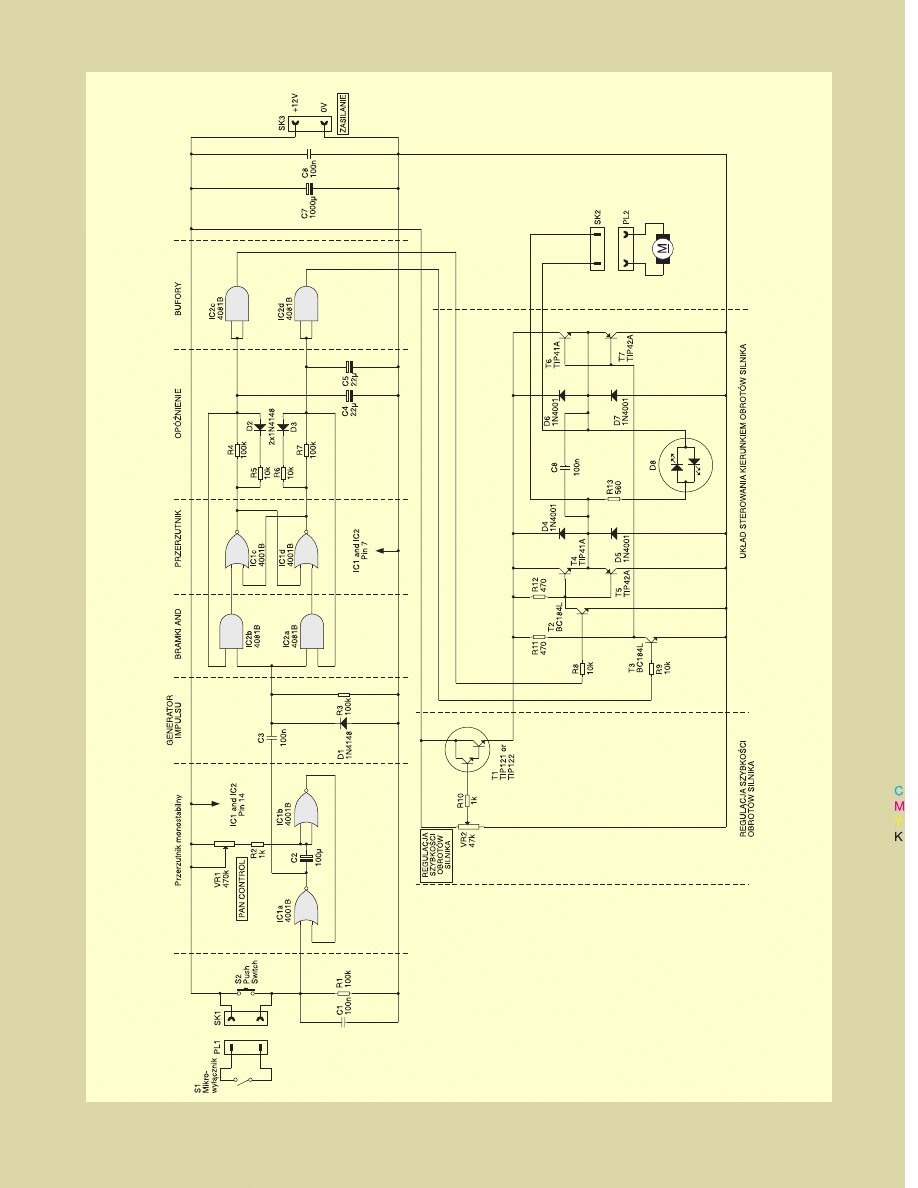
Układ główny
Całkowity schemat układu jest poka−
zany na rys. 3. Dwie bramki NOR, IC1a i
IC1b, tworzą przerzutnik monostabilny.
Układ taki został omówiony w części 2
"Klocków Elektronicznych" (rys. 2.8.).
Wejście 1 IC1a w stanie spoczynko−
wym jest utrzymywane przez rezystor R1
na poziomie 0V, jednak naciśnięcie mik−
rowyłącznika S1 łączy je z napięciem za−
silania. Kondensator C1 eliminuje wszel−
kie zakłócenia, które mogłyby się induko−
wać w (zwykle długim) przewodzie, łączą−
cym S1 z układem.
Czas trwania przerzutu jest wyznaczo−
ny przez kondensator C2 i sumaryczną
oporność potencjometru VR1 z rezysto−
rem R2. Ten ostatni stanowi minimalną
oporność, gdy oporność potencjometru
VR1 zostanie zredukowana do zera. Mak−
symalny czas przerzutu wynosi przy przy−
jętych wielkościach elementów 33 sekun−
dy.
“Normalnym” sygnałem wyjścio−
wym, z wyjścia 4 IC1b, jest stan wyso−
ki, pojawiający się natychmiast po wy−
zwoleniu przerzutnika i kończący się
przerzutem do 0V z chwilą upływu cza−
su przerzutu. W tym jednakże przy−
padku celowe jest posłużenie się syg−
nałem z wyjścia 3 pierwszej bramki,
IC1a, które z końcem czasu przerzutu
przerzuca się do stanu wysokiego.
Inaczej mówiąc, przerzutnik monosta−
bilny zostaje wyzwolony przez mikro−
wyłącznik, ale dodatni impuls otrzy−
muje się z niego dopiero po upływie
czasu przerzutu. Impuls ten zostaje
przesłany przez kondensator C3 do
wejść 6 i 1 dwóch bramek AND, odpo−
wiednio IC2b i IC2a. Taki sposób ge−
neracji impulsów został omówiony w
części 2 "Klocków Elektronicznych"
(sprzężenie zmiennoprądowe, rys.
2.5.). Rezystor R3 wyznacza czas
opadania impulsu i utrzymuje wejścia
1 i 6 IC2 na poziomie 0V. Dioda D1 za−
pobiega pojawieniu się impulsu ujem−
nego, mogącego powstać w momen−
cie wyzwolenia przerzutnika, gdy wy−
jście 3 IC1a przerzuca się ze stanu
wysokiego do 0V.
Przerzutnik i opóźnienie
Przerzutnik składa się z dwóch sprzę−
żonych krzyżowo bramek NOR, IC1c i
IC1d. Działanie przerzutnika z bramkami
AND zostało opisane wraz ze schematem
blokowym.
Z wyjściami przerzutnika łączą się dwa
układy opóźniające, utworzone z rezysto−
rów R4...R7, diod D2 i D3 oraz kondensa−
torów C4 i C5. Oba układy są identyczne.
Gdy na przykład wyjście 10 IC1c przerzu−
ca się ze stanu niskiego (0V) do wysokie−
go, to ten skok napięcia zostaje opóźnio−
ny o czas ładowania C4 przez R4. Opóź−
nienie to można w razie potrzeby modyfi−
kować doborem pojemności C4.
Bramka AND IC2c służy jako bufor i
zmienia stan wyjścia tylko wtedy, gdy
napięcie na C4 osiągnie poziom pro−
gowy, około połowy napięcia zasilają−
cego (zgodnie z opisem w części 1 i 2
" Klocków Elektronicznych"). Dzięki za−
stosowaniu bufora uzyskuje się czysty
przerzut napięcia wyjściowego, które
przez rezystor R8 zostaje doprowa−
dzone do bazy tranzystora TR2. Gdy
wyjście 10 IC2c przerzuca się z po−
wrotem do 0V, to C4 rozładowuje się
prądem płynącym przez R4, D2 i R5.
Rozładowuje się on znacznie szybciej,
niż został naładowany, ponieważ
oporność R5 jest znacznie mniejsza
od oporności R4. Działanie układu
opóźniającego pomiędzy IC1d a TR3
jest identyczne. W rezultacie, gdy
przerzutnik zmienia stan, silnik zosta−
je szybko wyłączony, po czym nastę−
puje krótka przerwa, po której silnik
zaczyna obracać się w przeciwnym
kierunku.
Sterowanie silnikiem
W zasadzie układ sterowania kierun−
kiem obrotów silnika jest identyczny jak
na rys. 3.13. Jednakże dwa wejściowe
kondensatory wygładzające, C1 i C2, któ−
re nie są w tym przypadku potrzebne, zo−
stały pominięte.
Jeżeli kamera znajduje się z dala od
układu sterującego, umieszczenie
LED D8, sygnalizującej kierunek obra−
cania się kamery, może okazać się po−
żyteczne. Idealnie nadaje się do tego
dwukolorowa LED, której kolor świe−
cenia, czerwony lub zielony, zależy od
kierunku przepływu prądu. Gdy silnik
nie porusza się, dioda gaśnie. Rezys−
tor R13 jest niezbędny, ogranicza bo−
wiem prąd w LED.
Regulację szybkości obrotów silnika
umożliwia układ z tranzystorem Darlingto−
na TR1, potencjometrem VR2 i rezysto−
rem R10. Układ ten jest identyczny z ukła−
dem na rys. 3.13.
Rys. 2 Zasięg panoramowania w stosunku
do pozycji mikrowyłącznika.
21
KLOCKI ELEKTRONICZNE
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
ELEKTRONIKA DLA WSZYSTKICH 3/96
Rys. 3 Kompletny schemat automatycznego systemu panoramowania kamerą.
2 2
KLOCKI ELEKTRONICZNE
ELEKTRONIKA DLA WSZYSTKICH 3/96
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
Kondensatory C7 i C8 służą do wygła−
dzania napięcia zasilającego. W ukła−
dach tego rodzaju, zawierających silniki
wytwarzające zakłócenia i czułe bramki
logiczne, są one niezbędne.
Ręczne sterowanie
kierunkiem obrotów
Układ jest przeznaczony do działania
bez nadzoru. Są jednakże sytuacje, w
których ręczne sterowanie staje się po−
trzebne. Na przykład po uruchomieniu
układu nie wie on w którym kierunku
względem mikrowyłącznika powinien ru−
szyć.
Z tego powodu równolegle do mikrowy−
łącznika S1 dodano przycisk S2, który za po−
średnictwem przerzutnika monostabilnego
umożliwia ręczne przełączanie kierunku ob−
rotów silnika. Jeżeli S1 jest rozłączony, albo
na skutek odłączenia, albo połączonym z nim
w szereg dodatkowym wyłącznikiem, S2 za−
pewnia pełną kontrolę nad kierunkiem ru−
chów kamery. Jest to szczególnie użyteczne,
gdy potencjometrem VR1 został dobrany
krótki czas przerzutu przerzutnika monosta−
bilnego.
Przełącznik ten, wraz z regulatorem
VR2 szybkości silnika, jest bardzo wy−
godny do śledzenia kamerą poruszające−
go się obiektu. Można by jeszcze użyć do−
datkowego wyłącznika w obwodzie silni−
ka, umożliwiającego natychmiastowe za−
trzymanie kamery.
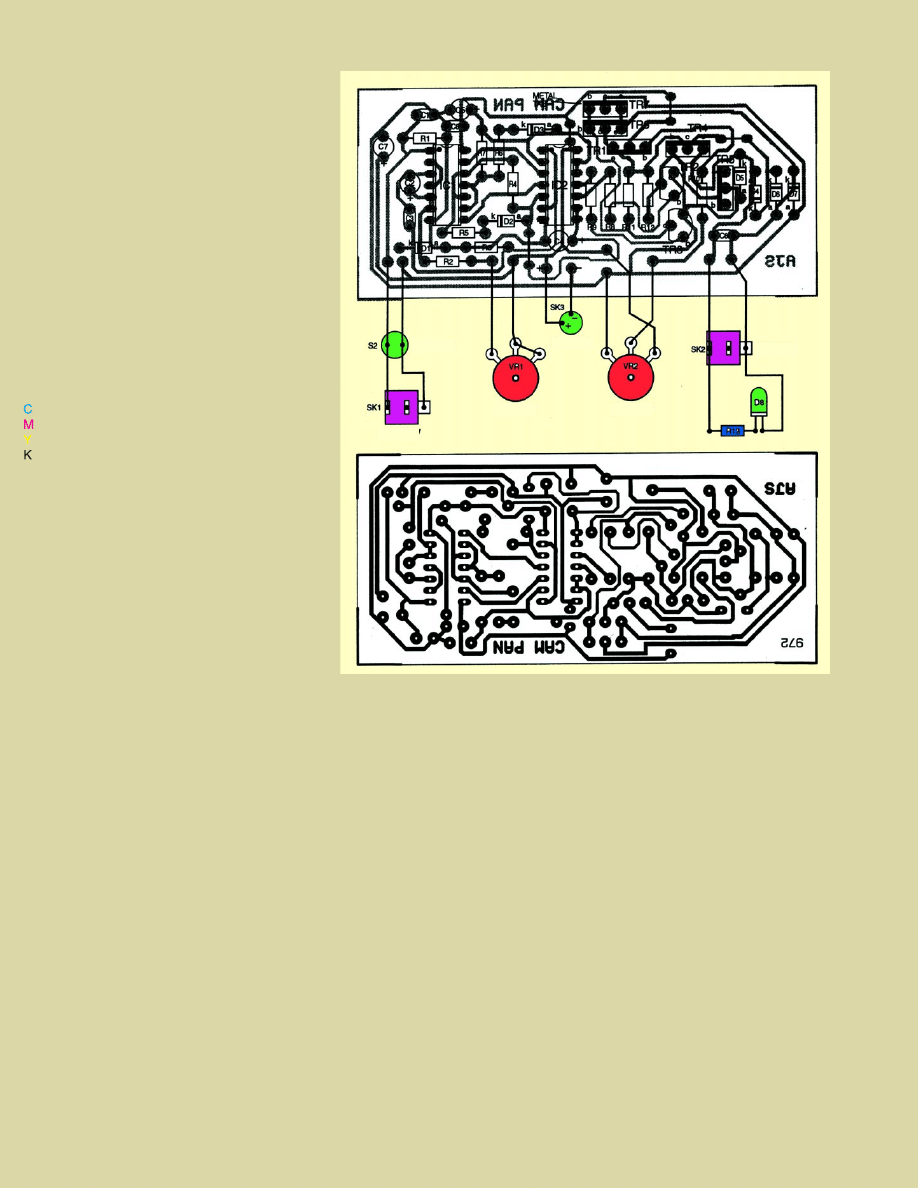
Montaż
Mozaika ścieżek płytki drukowanej oraz
rozmieszczenie na niej elementów pokazuje
rys. 4. Montaż należy zacząć od wlutowania
podstawek układów scalonych i zworek, a na−
stępnie mniejszych elementów, nie zapomi−
nając o właściwym ukierunkowaniu diod, we−
dług zaznaczonych na rysunku pasków ich
polaryzacji. Rezystory i kondensatory 100nF
(C6 i C8) można montować w dowolny spo−
sób, ale kondensatory elektrolityczne i tran−
zystory muszą zostać ukierunkowane zgod−
nie z rysunkiem. Nie wolno pomylić tranzysto−
rów TIP121, TIP41A i TIP42A, wszystkie wy−
glądają bardzo podobnie.
Wmontowany w płytę czołową obroto−
wy potencjometr VR1, do sterowania pa−
noramicznym ruchem (PAN) kamery,
zgodnie z rysunkiem łączy się z płytką pa−
rą przewodów. Jako regulatora szybkoś−
ci (SPEED), VR2, można użyć podobne−
go potencjometru obrotowego w płycie
czołowej, albo poziomego potencjometru
montażowego bezpośrednio na płytce (w
tych samych otworach).
Przełączniki, silnik i zasilacz, łączy się
z płytką za pośrednictwem końcówek lu−
towniczych. Gniazdka i wtyczki umożli−
wiają dogodne połączenia układu z silni−
kiem, wyłącznikiem i zasilaczem. W pro−
totypie użyto różnych typów złączy aby
uniknąć pomyłek. W razie potrzeby przy−
cisk S2 do ręcznego sterowania można
połączyć bezpośrednio równolegle z S1.
Na koniec należy wstawić do podstawek
układy scalone, pamiętając o starannym uzie−
mieniu swojego ciała (przez dotknięcie uzie−
mionego obiektu) przed wyjęciem ich z opa−
kowania. Należy upewnić się dokładnie, czy
zostały właściwie ukierunkowane nacięciami
w podstawkach, zgodnie z rys. 4.
Tranzystory mocy nie muszą być wy−
posażone w radiatory, chyba że spraw−
ność zastosowanego silnika jest bardzo
niska. W czasie prób należy często
sprawdzać ich temperaturę. Na dotyk mo−
gą być nieco gorące, ale nie mogą parzyć.
Sprawdzanie
Do sprawdzania układu najlepiej użyć
stabilizowanego zasilacza 12V/100mA.
Trzeba wtedy odłączyć silnik i zastąpić go
woltomierzem cyfrowym (woltomierz ana−
logowy źle znosi ciągłe odwracanie pola−
ryzacji). Po ustawieniu VR1 i VR2 w środ−
kowym położeniu można włączyć układ.
Woltomierz powinien wskazać na koń−
cówkach silnika napięcie dodatnie lub
ujemne. Po uruchomieniu mikrowyłączni−
ka napięcie powinno spaść do zera, a po
czasie nastawionym przez VR1 pojawić
się w odwrotnej polaryzacji. Ponowne
uruchomienie mikrowyłącznika powinno
po tym samym opóźnieniu odwrócić na−
pięcie z powrotem.
Jeżeli VR1 jest ustawiony w pozycji ze−
rowej, tylko bardzo krótkie zwarcie mikro−
wyłącznika może wywołać odwrócenie
polaryzacji napięcia. Jeżeli czas zwarcia
S1 nie jest dostatecznie krótki, to odwró−
cenie napięcia nie nastąpi.
Za pomocą VR2 powinno dać się regu−
lować napięcie wyjściowe od 0V do pra−
wie 12V.
Teraz można przyłączyć silnik, używa−
jąc zasilacza 12V o wydajności wystar−
czającej do jego napędzania i sprawdzić,
czy układ zachowuje się poprawnie. Rów−
nież i teraz krótki czas nastawiony za po−
mocą VR1 wymaga bardzo krótkiego
Rys. 4 Płytka drukowana i rozmieszczenie na niej elementów.
23
KLOCKI ELEKTRONICZNE
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
ELEKTRONIKA DLA WSZYSTKICH 3/96
zwarcia S1 do wywołania zmiany kierun−
ku obrotów.
Odnajdywanie błędów
Podstawowe zasady odnajdywania błę−
dów zostały opisane w części 1 "Klocków
Elektronicznych". Po zakończeniu zalecane−
go przeglądu wizualnego płytki należy w opi−
sany sposób użyć woltomierza. Doskonałymi
punktami sprawdzania są:
wejście 1 IC1a
wyjście 3 IC1a
wyjście 10 IC1c
wyjście 11 IC1d
Detekcja impulsu za C3 będzie bardzo
trudna. Jeżeli przerzutnik monostabilny
działa poprawnie, ale silnik nie odwraca
kierunku obrotów, to można spróbować
na moment połączyć drutem wspólny
punkt C3 i R3 z napięciem zasilającym.
Jeżeli przerzutnik i bramki AND działają
właściwie, powinno to spowodować od−
wrócenie kierunku obrotów silnika.
Jeżeli silnik nie obraca się w ogóle, na−
leży sprawdzić napięcia wyjść buforów
(10 i 11 IC2). Jedno z nich powinno być
dodatnie. Jeżeli oba są dodatnie, to na
obu doprowadzeniach silnika jest 0V i nie
może on działać.
Jeżeli wszystko jest w porządku, to trzeba
sprawdzić napięcia baz TR2 i TR3. Jedno po−
winno być bliskie 0V, a drugie dodatnie. W ra−
zie wątpliwości należy spróbować połączyć
rezystorem 1k
W
jedną z tych baz z napięciem
zasilania, co powinno uruchomić silnik. Jeśli
nie, to trzeba sprawdzić napięcie emitera
TR1, który dostarcza napięcia zasilającego
moduł końcowy, i powinien dać się regulować
za pomocą VR2.
Obudowa
Płytka drukowana i regulatory mieszczą
się w niewielkiej obudowie z plastyku. Posłu−
gując się fotografiami trzeba zacząć od wier−
cenia dwóch otworów na potencjometry (albo
jednego, jeżeli VR2 jest na płytce), oraz głów−
nego wyłącznika S3, a w razie potrzeby i in−
nych wyłączników do ręcznego sterowania. Z
boku należy wywiercić otwory na złącza zasi−
lania, silnika i mikrowyłącznika.
Płytkę montuje się do pokrywy obudo−
wy za pomocą niewielkich podstawek sa−
moprzylepnych.
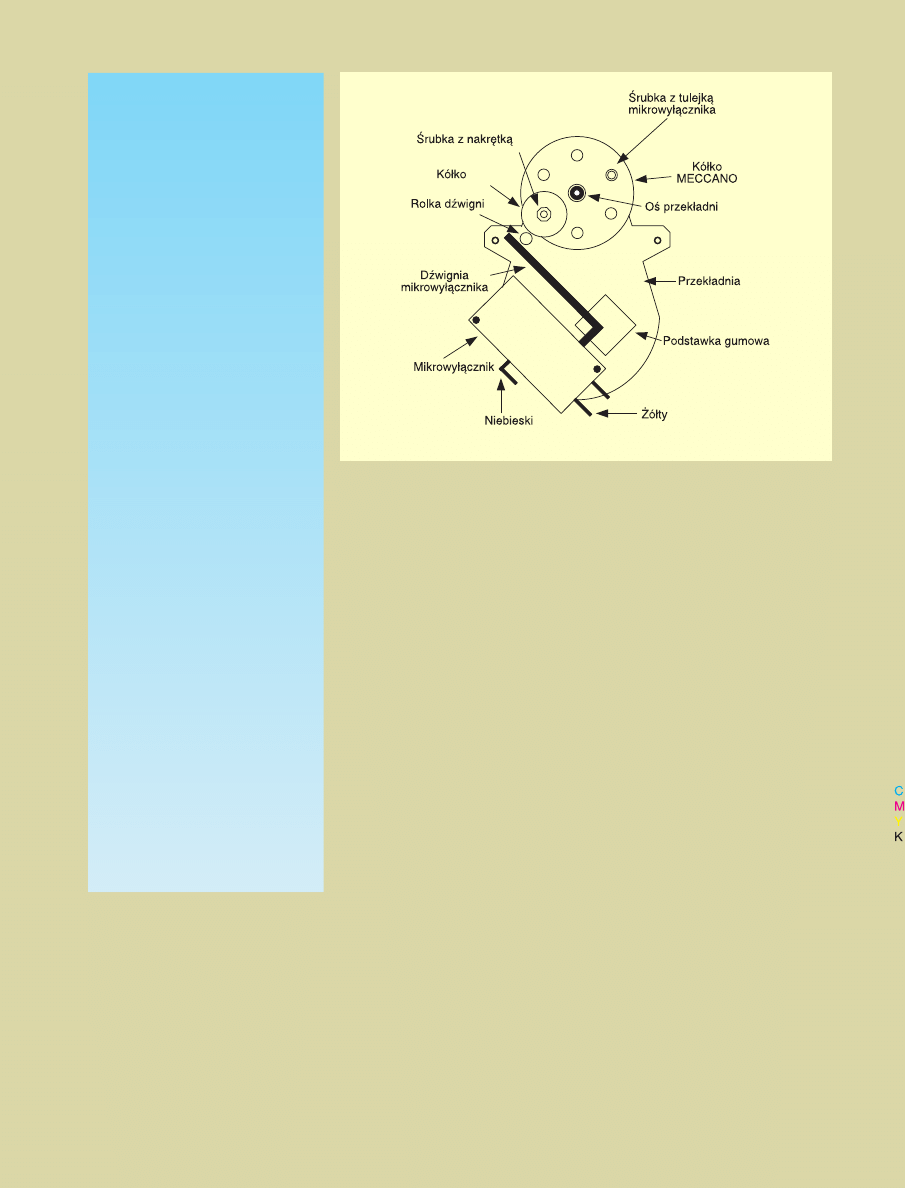
Silnik i przekładnia
Odpowiedni silnik z przekładnią powi−
nien w czasie działania być niemal niesły−
szalny i nadawać się do nieprzerwanej
pracy przez bardzo długie okresy.
Wałek przekładni RS został wyposażo−
ny w standardowe kółko Meccano, służą−
ce do włączania mikroprzełącznika, jak
pokazano na rys. 5. Trzeba jednak pa−
miętać, że kółko to może nie pasować do
innych przekładni.
Istotne jest, aby mikroprzełącznik nie
pozostawał zbyt długo zwarty, może to
bowiem zaburzyć działanie przerzutnika
monostabilnego. Innymi słowy, czas
przerzutu przerzutnika monostabilnego
musi być zawsze dłuższy od czasu zwar−
cia styków mikrowyłącznika.
Kamery
Kamery nadzorujące są obecnie do
nabycia we wszelkich kształtach i rozmia−
rach. Niektóre mieszczą się w standardo−
wych obudowach, które z kolei można
umocować do wałka przekładni. Można
także nabyć komputerowe kamery wideo.
Część czwarta
Projektem konstrukcyjnym, który zo−
stanie dołączony do części 4 "Klocków
Elektronicznych", będą elektroniczne
kości do gry o zmiennej szybkości.
Max Horsey
projekt płytki drukowanej − Alex Simm
Rys. 5 Sposób włączania mikrowyłącznika przez przekładnię w prototypie.
WYKAZ ELEMENTÓW
Rezystory
R1, R3, R4, R7: 100k
W
R2, R10: 1k
W
R5, R6, R8, R9: 10k
W
R11, R12: 470
W
R13: 560
W
VR1: 470k
W
, obrotowy potencjometr
liniowy
VR2: 47k
W
, potencjometr liniowy
(zob. tekst)
Kondensatory
C1, C3, C6, C8: 100nF, dyskowy
ceramiczny
C2: 100µF/16V, stojący
C4, C5: 22µF/16V, stojący
C7: 1000µF/16V, stojący
Półprzewodniki
D1...D3: 1N4148, sygnałowa
D4...D7: 1N4001, prostownicza
D8: dwukolorowa LED z oprawką
TR1: TIP121 lub TIP122, tranzystor
Darlingtona npn
TR2, TR3: BC184L, npn
TR4, TR6: TIP41A, npn
TR5, TR7: TIP42A, pnp
IC1: 4001B, poczwórna 2−wejściowa
bramka NOR
IC2: 4081B, poczwórna 2−wejściowa
bramka AND
Różne
S1: jednoobwodowy mikroprzełącz−
nik czynny
S2: jednoobwodowy przycisk
czynny, o profilu kwadratowym
SK1, PL1: gniazdko z wtykiem
2,5mm
SK2, PL2: gniazdko z wtykiem
3,5mm
SK3: gniazdko wejściowe zasilania
płytka drukowana kod 972
obudowa plastykowa 127mm x
63mm x 44mm
silnik z przekładnią (zob. tekst)
3 podstawki samoprzylepne do
płytki drukowanej
Wyszukiwarka
Podobne podstrony:
Automatyka systemu Nexo
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Sprawozdanie Automatyka systemy liczbowe, SGGW Technika Rolnicza i Leśna, Automatyka
2010 07 HAS House's Automated System
Projekt automatyzacji systemu garażowego
Projekt automatyzacji systemu garażowego
ZIMS05 Automatyzacja systemów mechanicznych
46 Automatyczne systemy diagnostyki medycznej
Odpowiedzi na pytania ASE mini, Automatyzacja Systemów Energetycznych
Odpowiedzi na pytania ASE BIG, Automatyzacja Systemów Energetycznych
AIS Automatyczny System identyfikacji
ZASTOSOWANIE PROGRAMU HMI-SCADA, Nauka i Technika, Automatyka, Systemy SCADA
ASE lab ściąga, Automatyzacja Systemów Energetycznych
Initial Assessments of Safeguarding and Counterintelligence Postures for Classified National Securit
System nadzoru z kamerami przemysł TV
1999 03 System nadzoru z kamerami przemysłowymi TV
więcej podobnych podstron