G.4. Równanie wektorowe krzywej w przestrzeni
Funkcje wektorowe
Definicjea
Funkcję, która każdemu punktowi pewnego obszaru D przyporządkowuje określony wektor
nazywamy funkcją wektorową, a obszar D obszarem istnienia funkcji.
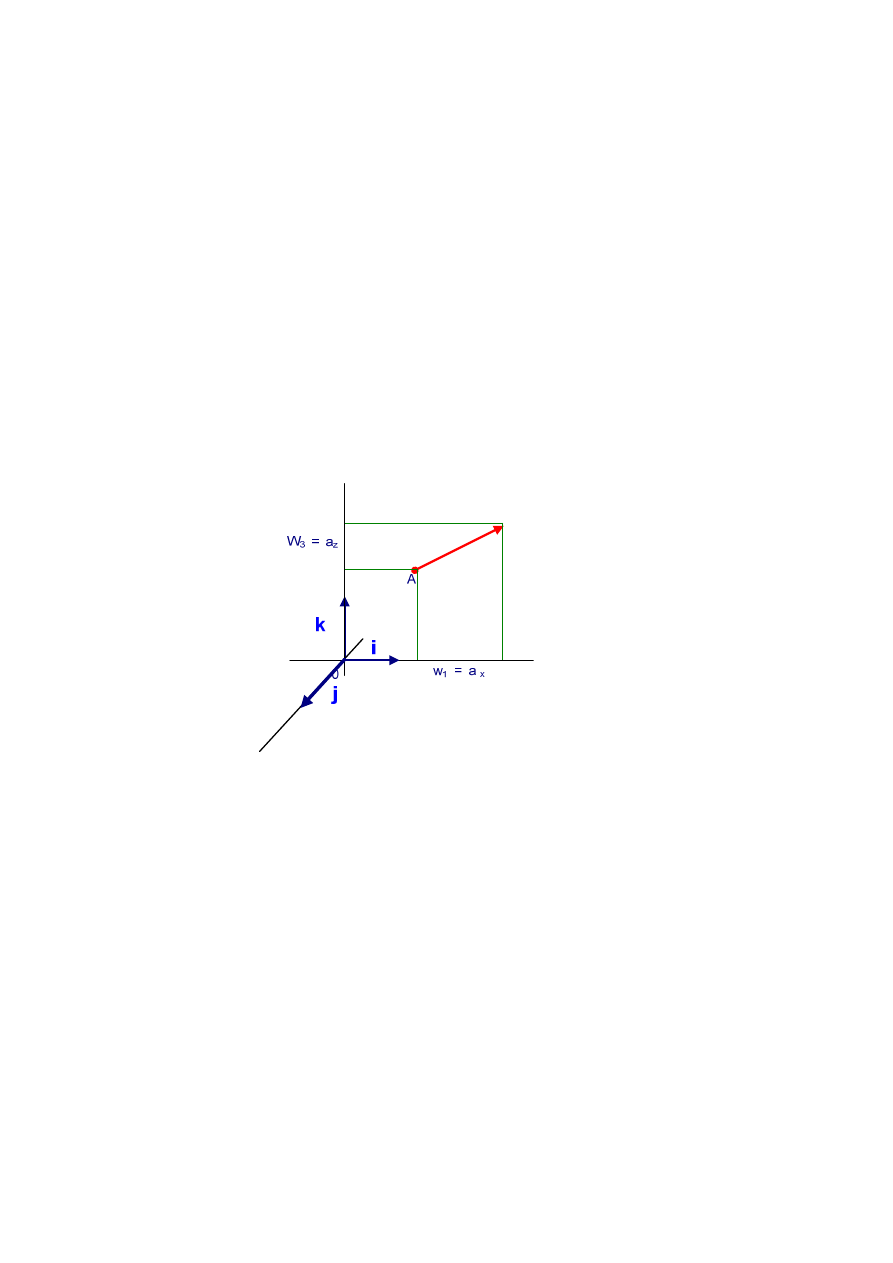
Załóżmy, że w trójwymiarowej przestrzeni kartezjańskiej Oxyz punkt A = (x, y, z) zaś
rzutami wektora
→
r
na oś x, oś y i oś z są odpowiednio funkcje – składowe wektora
→
r
:
w
1
= a
x
(x, y, z), w
2
= a
y
(x, y, z), w
3
= a
z
(x, y, z).
Tym samym wektor
→
r
jest wyznaczony przez podanie tych funkcji określonych w obsza-
rze D, co notujemy:
→
r
= [w
1
, w
2
, w
3
] = [a
x
(x, y, z); a
y
(x, y, z); a
z
(x, y, z)]
lub
→
r
= a
x
(x, y, z)
⋅
i + a
y
(x, y, z)
⋅
j + a
z
(x, y, z)
⋅
k.
gdzie i, j, k są wektorami jednostkowymi (wersorami) osi x, osi y i osi z.
W tym przypadku funkcje - składowe wektora
→
r
są funkcjami liczbowymi trzech zmien-
nych liczbowych (zmiennych x, y, z).
Przykład 1.
Funkcję wektorową definiujemy następująco:
→
r
= [3x – 2y; z – 1+ x; x + y + z].
Oznacza to, że:
a) punktowi A = (0, 1, -1) przyporządkowano wektor
→
A
r
= [-2, -2,0] = -2i -2j + 0 k,
b) punktowi B = (0, 0, 0) przyporządkowano wektor
→
B
r
= [0, -1,0] = -j.
Punktowi C = (2, 1, -3) nie jest przyporządkowany wektor
→
r
= [-1, -4,3] = -i -4j + 3k,
ponieważ -1
≠
3
⋅
2 - 2
⋅
1 = 4 .
Wektor
→
r
= [-1, -4,3] = -i -4j + 3k jest przyporządkowany takiemu punktowi
P = (x
0
,y
0
, z
0
), którego współrzędne spełniają układ równań 3x
0
– 2y
0
= -1 i z
0
– 1+ x
0
= -4
x
0
+ y
0
+ z
0
= 3. Jest to punkt P = (
3
13
−
, 6,
3
22
−
).
Przyjmijmy, że współrzędne punktu P = (x, y, z) są funkcjami parametru u
∈
[ a, b]
(czyli zależą tylko od u ). Czyli x = x(u) ; y = y(u) ; z = z(u).
Wiemy, że wartościami funkcji wektorowej w trójwymiarowej przestrzeni kartezjańskiej
Oxyz są wektory
→
r
= a
x
(x, y, z)
⋅
i + a
y
(x, y, z)
⋅
j + a
z
(x, y, z)
⋅
k. Skoro x = x(u) ; y = y(u);
z = z(u), więc także składowe wektora
→
r
są funkcjami jednej zmiennej liczbowej u
∈
[ a, b].
Oznaczmy: w
1
= a
x
(x, y, z) = a
x
(u); w
2
= a
y
(x, y, z) = a
y
(u); w
3
= a
z
(x, y, z) = a
z
(u).
Wtedy
→
r
= [a
x
(u); a
y
(u); a
z
(u)], dla u
∈
[ a, b]. Inaczej
→
r
= a
x
(u)i + a
y
(u)j + a
z
(u)k.
Oznacza to, że składowe wektora
→
r
będącego wartościami funkcji wektorowej
→
r
są
funkcjami liczbowymi jednej zmiennej liczbowej u.
Przykład 2.
Rozważmy funkcję wektorową
→
r
= r(u) = [3 - u; -4u+5; u
2
+ 3 u - 1] dla u
∈
[ -1, 3]
Wartościami tej funkcji są, na przykład, wektory:
a)
→
1
r
= [3, 5, -1] wyznaczony dla u = 0,
b)
→
2
r
= [2, 1, 3] wyznaczony dla u = 1,
c)
→
3
r
= [ 4, 9, -3] wyznaczony dla u = -1,
d)
→
4
r
= [1, -3, 9] wyznaczony dla u = 2.
Natomiast
→
5
r
= [ 0, -7, -1] nie jest wartością tej funkcji, ponieważ nie istnieje takie
u
∈
[ -1, 3], by jednoczenie 3 – u = 0 i -4u+5 = -7 i u
2
+ 3 u – 1 = -1.
Rozważmy te wartości funkcji wektorowej
= r(u) = [a
x
(u); a
y
(u); a
z
(u)] = a
x
(u) i + a
y
(u) j + a
z
(u) k dla u
∈
(a, b)
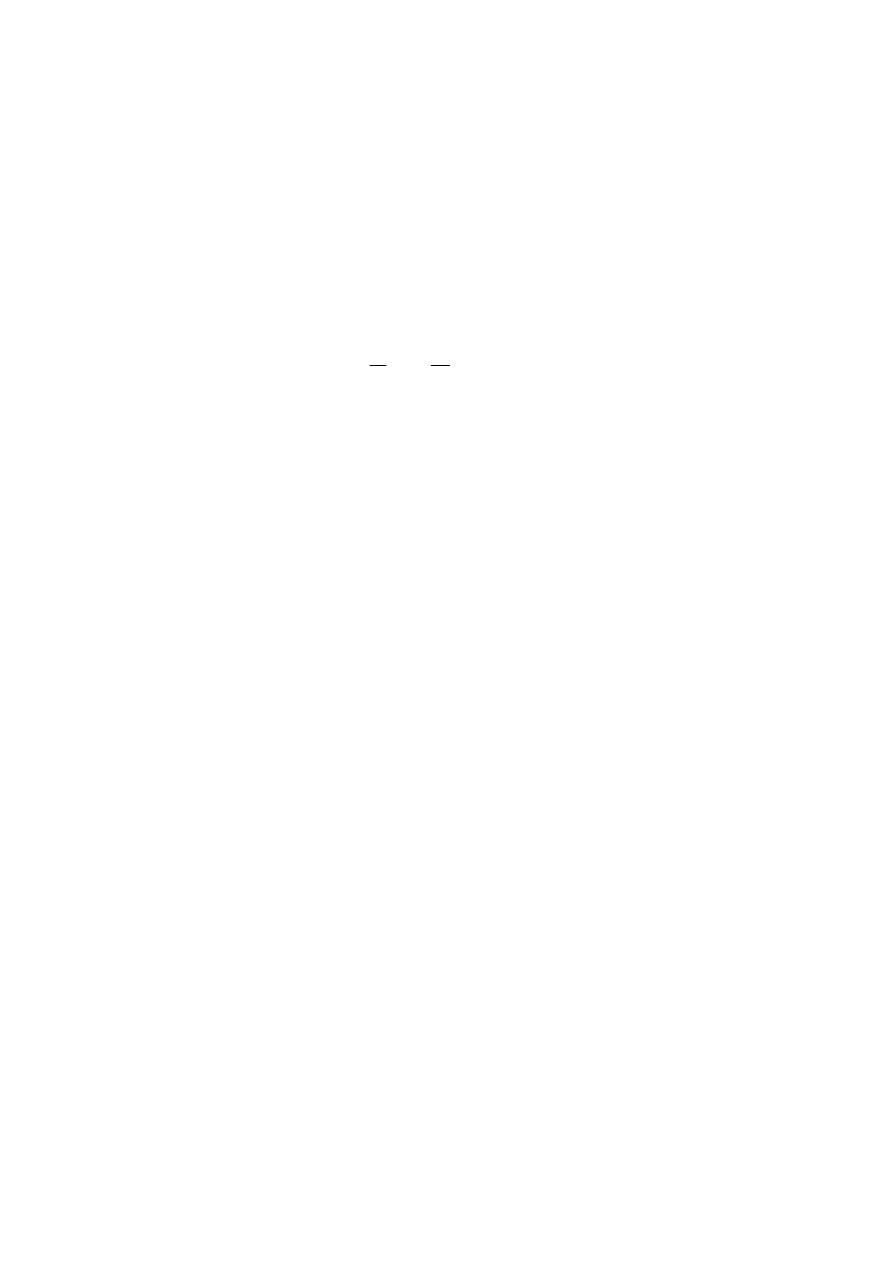
są reprezentowane „strzałkami” zaczepionymi w początku układu współrzędnych.
Rysunek przedstawia wektor r(u), gdzie u jest konkretnie wybraną liczbą z przedziału
(a, b), reprezentowany „strzałką”
→
OP
.
Mówimy, że wektor
→
r
= r(u) jest wektorem wodzącym punktu P(u) będącego końcem
wektora
→
r
= OP(u).
Gdy parametr u przebiega wszystkie wartości z przedziału (a, b), to zbiór punktów bę-
dących końcami wszystkich wektorów
→
r
= OP(u) - wektorów wodzących punktu P(u) - jest
określonym zbiorem punktów.
Przykład 3.
Wartościami funkcji wektorowej
→
r
= r(u) = [3u; -4u; u+1] = (3u) i + (-4u)j + (u+1) k , dla u
∈
[ -2, 4]
są, na przykład, wektory:
a)
→
1
r
= [0, 0, 1] wyznaczony dla u = 0,
b)
→
2
r
= [3, -4, 2] wyznaczony dla u = 1,
c)
→
3
r
= [ -3, 4, 0] wyznaczony dla u = -1,
d)
→
4
r
= [6, -8, 3] wyznaczony dla u = 2.
Niech O będzie początkiem układu współrzędnych. Rozważmy takie punkty A, B,

C, D, że wektory:
OA =
→
1
r
= [0, 0, 1] = 0 i + 0j + k = k ,
OB =
→
2
r
= [3, -4, 2] = 3 i -4j + 2 k,
OC =
→
3
r
= [ -3, 4, 0] = -3 i + 4j + 0 k = -3 i + 4j,
OD =
→
4
r
= [6, -8, 3] = 6 i -8j + 3 k.
Wektory OA, OB, OC, OD, jako wartości funkcji wektorowej
→
r
= (3u) i + (-4u)j + (u+1) k
dla argumentów u= 0, u= 1, u= -1, u= 2 są wektorami wodzącymi punktów A, B, C, D.
Równanie wektorowe krzywej. Wektor styczny.
Definicje
Załóżmy, że funkcja wektorowa
→
r
= r(u) = a
x
(u) i + a
y
(u) j + a
z
(u) k jest określona w prze-
dziale (a, b) parametru u. Załóżmy dalej, że funkcje w
1
= a
x
(u); w
2
= a
y
(u); w
3
= a
z
(u) są cią-
głe oraz ich funkcje pochodne w
1
’= a’
x
(u); w
2
’= a’
y
(u); w
3
’= a’
z
(u)] są ciągłe i nie są jedno-
cześnie równe 0.
a) Zbiór punktów P przestrzeni będących końcami wektorów wodzących
→
r
= OP nazywamy
krzywą, zaś
→
r
= r(u) nazywamy równaniem wektorowym tej krzywej.
b) Równania x = a
x
(u); y = a
y
(u); z = a
z
(u) nazywamy równaniami parametrycznymi tej
krzywej.
Przykład 4.
Wiemy, że układ równań x = 1 + 3t, y = -2 + 4t, z =5 – 7t, t
∈
R, opisuje prostą – nazwijmy ją
a - przechodzącą przez punkt A = (1, -2,5) równoległą do wektora w = [3, 4,-7].
Zgodnie z przyjętą umową równania x = 1 + 3t, y = -2 + 4t, z =5 – 7t, t
∈
R, są równa-
niami parametrycznymi prostej a. Jej równaniem wektorowym jest
→
r
= (1 + 3t) i + (-2 + 4t) j + (5 – 7t) k lub
→
r
= [1 + 3t, -2 + 4t, 5 – 7t] dla t
∈
R.
Definicja
Wektor
→
'
r
= r’ (u) = [a’
x
(u); a’
y
(u); a’
z
(u)] = a’
x
(u) i + a’
y
(u)j + a’
z
(u)k - jego składowymi są
pochodne funkcji w
1
= a
x
(u); w
2
= a
y
(u); w
3
= a
z
(u) - nazywamy wektorem stycznym do
krzywej L o równaniu
→
r
= r(u) = a
x
(u) i + a
y
(u) j + a
z
(u) k w punkcie P(u) krzywej L odpo-
wiadającym wartości u parametru z przedziału [a, b].
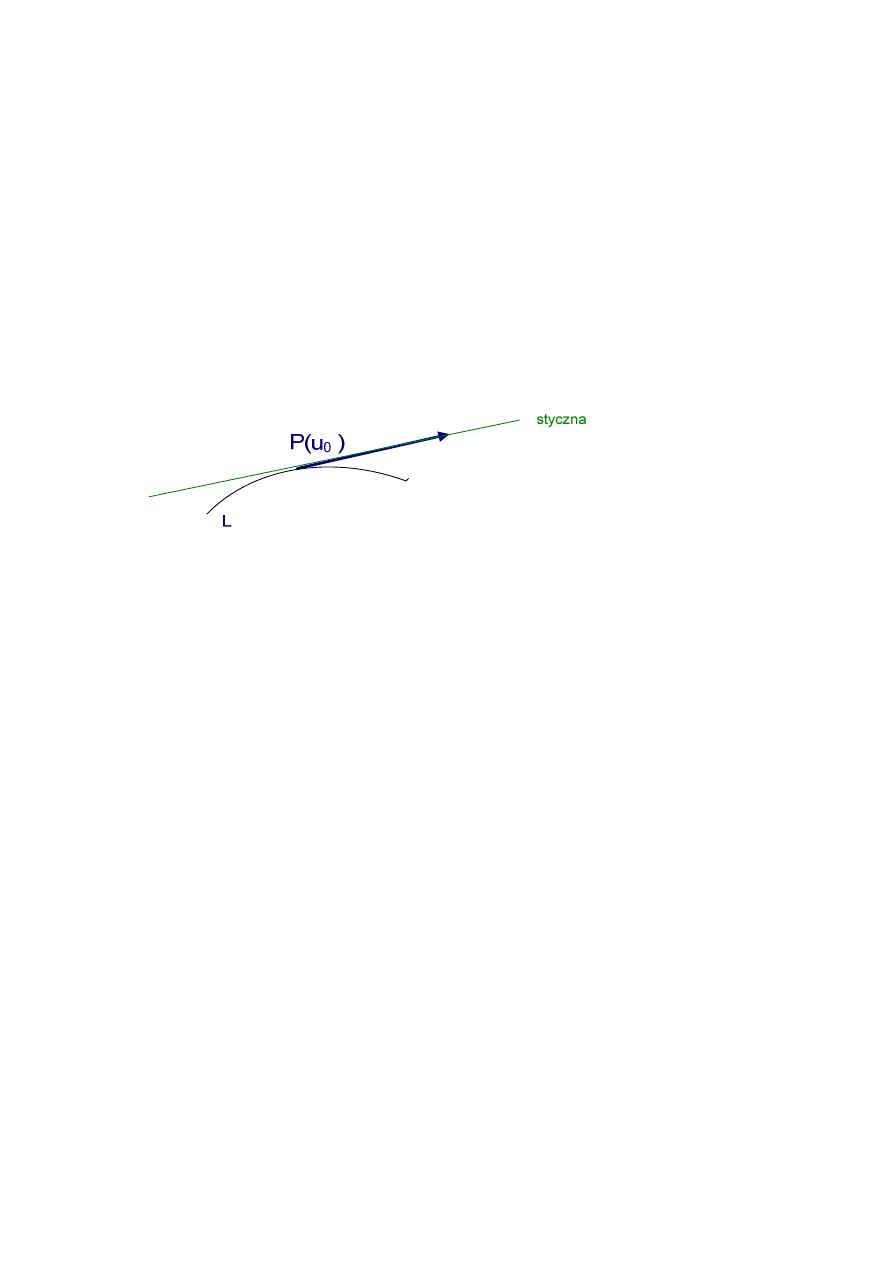
Twierdzenie - równanie stycznej
Jeżeli P(u
0
) jest danym punktem krzywej L, czyli P(u
0
) = ( a
x
(u
0
), a
y
(u
0
), a
z
(u
0
) ),
oraz r’ (u
0
) = a’
x
(u
0
) i + a’
y
(u
0
)j + a’
z
(u
0
)k jest wektorem stycznym do krzywej L w punkcie
P(u
0
), wtedy styczna - w układzie współrzędnych Oxyz – ma równania parametryczne
x
−
a
x
(u
0
) = t
⋅
a’
x
(u
0
); y
−
a
y
(u
0
) = t
⋅
a’
y
(u
0
), z
−
a
z
(u
0
) = t
⋅
a’
z
(u
0
) dla t
∈
R.
Przykład 5.
Dana jest krzywa o równaniu r(u) = u i + u
2
j - u
3
k dla u
∈
[ 0, 5].
a) Zbadaj, który z punktów A = (1, 3, -1), B = (0, 0, 0), C= ( -1, 1, 1), D = (3, 9, -27)
należy do tej krzywej.
b) Wyznacz wektor
→
s
styczny do tej krzywej w punkcie P = (2, 4, -8).
c) Napisz równanie prostej stycznej do tej krzywej w punkcie P = (2, 4, -8).
Rozwiązanie
a) Tylko punkt D należy do tej krzywej bowiem dla parametru u = 3 mamy
r(3) = 3 i + 9 j - 27 k.
b) Rozważamy funkcje f(u) = u, g(u) = u
2
, h(u) = - u
3
dla u
∈
[ 0, 5].
Mamy f’(u) = 1, g’(u) = 2u, h’(u) = - 3u
2
dla u
∈
[ 0, 5].
Punkt P jest końcem wektora OP, dla parametru u = 2.
Zatem: f’(2) = 1, g’(2) = 4 , h’(3) = - 12.
Poszukiwanym wektorem jest
→
s
= [1, 4, -12] = i + 4j – 12k.
c) Równanie stycznej jest następujące: x = -2 + t , y = -4 + 4t, z = 8 – 12 t dla t
∈
R.
Przykład 6.
W układzie współrzędnych kartezjańskich Oxyz prosta a dana jest układem równań parame-
trycznych
x = 2 + 3u, y = -3 + u, z = 4 - 5u
dla u
∈
R.
Punkt A = (2, 1, -5) należy do tej prostej. Aby się o tym przekonać wystarczy przyjąć,
że u = 0.
Jest ona równoległa do wektora [3, 1, -5].
Równanie r(u) = (2 + 3u) i + (-3 + u)j + (4 - 5u
)k dla u
∈
R jest równaniem wektorowym
tej prostej. Mówimy, że ta prosta jest sparametryzowana parametrem u.
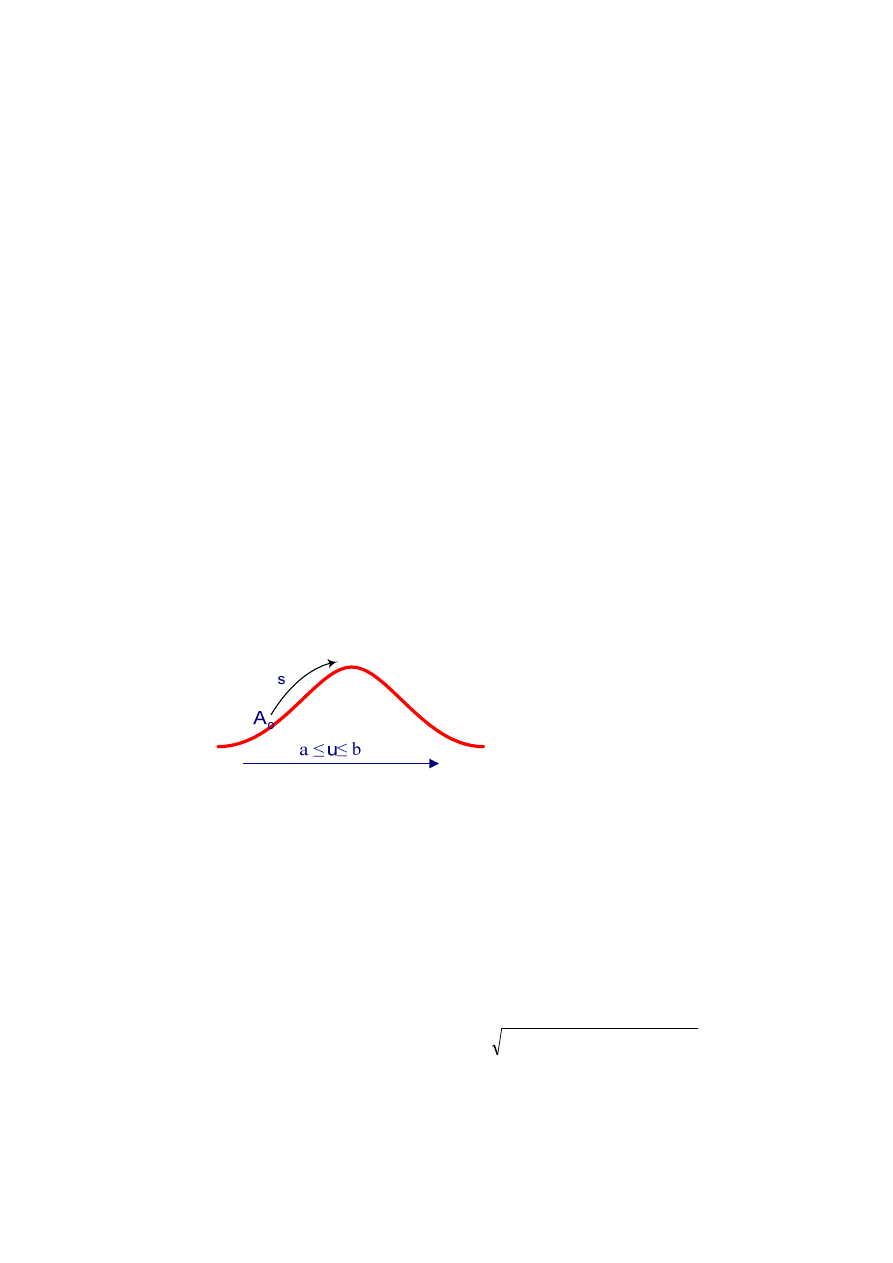
Parametryzacja naturalna krzywej
Niech
→
r
= r(u), dla u
∈
[a, b], będzie równaniem wektorowym krzywej L; mówimy, że
krzywa ta jest sparametryzowana parametrem u.
Wśród wszystkich możliwych parametrów krzywej można wybrać taki, który nazywa-
my parametrem naturalnym krzywej. Jest nim względna długość łuku krzywej, np. mierzona
od ustalonego jej punktu krzywej.
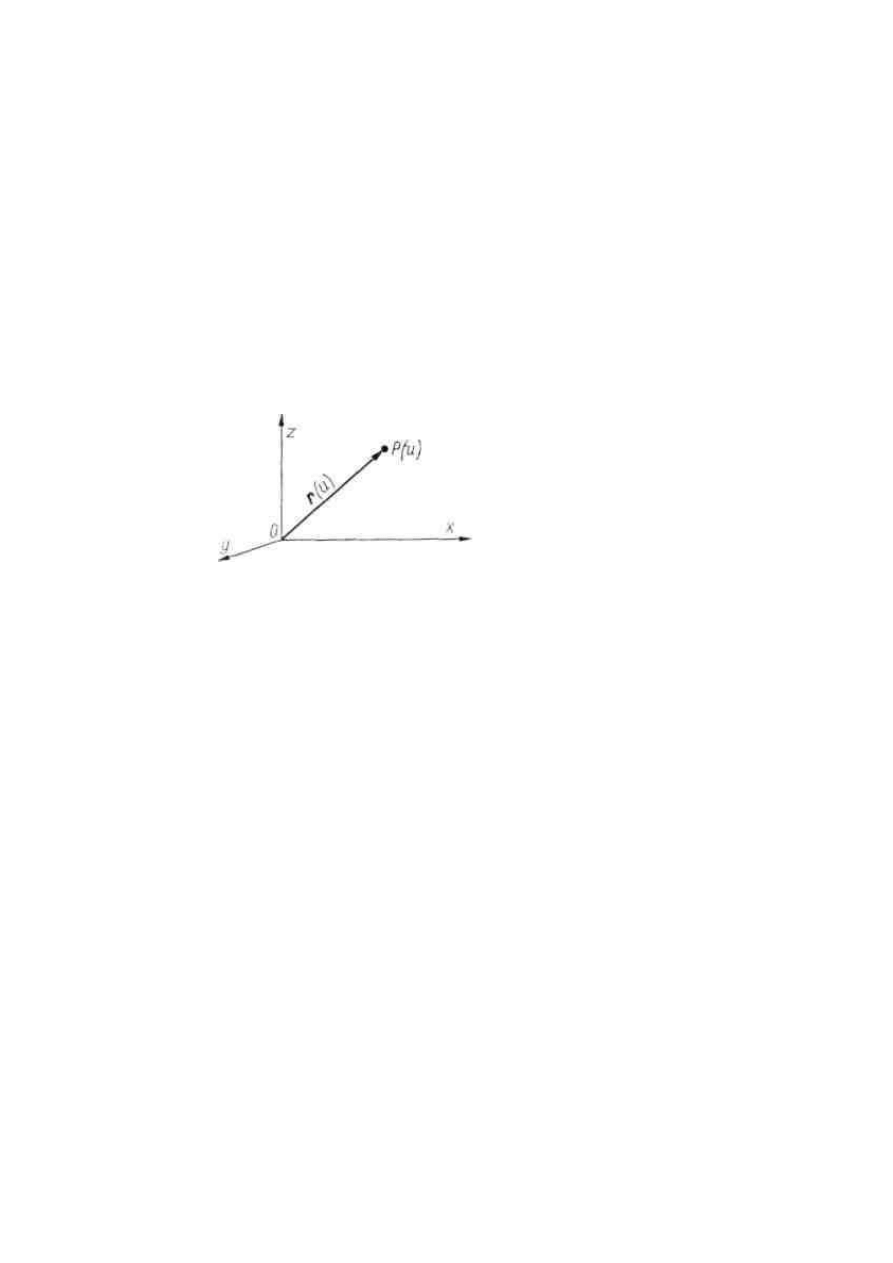
Na rysunku kolorem czerwonym przedstawiono krzywą L, parametr u
∈
[a, b], zaś parametr s
określa długość tej krzywej poczynając od punktu A krzywej L.
Przejścia od dowolnej parametryzacji do parametryzacji naturalnej dokonujemy następująco:
Przyjmijmy, że u
0
jest wartością parametru odpowiadającą ustalonemu punktowi P
0
krzy-
wej L o równaniu
→
r
= r(u) = a
x
(u) i + a
y
(u) j + a
z
(u) k, zaś u jest wartością parametru
odpowiadającą punktowi zmiennemu P, wtedy s =
∫
+
+
u
u
z
y
x
du
u
a
u
a
u
a
0
2
,
2
,
2
,
)]
(
[
)]
(
[
)]
(
[
.
Wzór ten określa długość s łuku jako ciągłą funkcję parametru u, wobec czego s = s(u).
Długość łuku krzywej od punktu P
0
, któremu od-
powiada wartość u
0
parametru do punktu P, które-
mu odpowiada wartość u parametru wyraża się
wzorem s =
∫
+
+
u
u
z
y
x
du
u
a
u
a
u
a
0
2
,
2
,
2
,
)]
(
[
)]
(
[
)]
(
[
.
Jeżeli pochodna
→
r
,
= r
,
(u) funkcji
→
r
= r(u) jest stale różna od zera, wtedy równanie
s = s(u) można napisać w postaci u = u(s), czyli jako funkcję długości s łuku. Wtedy równanie
→
r
= r(u) krzywej L można zapisać
→
r
= r[u(s)].
Jest to naturalna parametryzacja krzywej L; to równanie piszemy wówczas
→
r
= r(s),
gdzie s jest długością łuku mierzonego od punktu s = 0.
Przykład 7.
Dana jest krzywa L o równaniu r(u) = (2 + 3u) i + (-3 + u)j + (4 - 5u
)k dla u
≥
0 w układzie
współrzędnych kartezjańskich Oxyz. Napisz równanie krzywej L w parametryzacji natural-
nej.
Rozwiązanie
Niech P
0
będzie punktem tej krzywej odpowiadającym parametrowi u = 0, zaś P punktem
zmiennym odpowiadającym parametrowi u.
Długość łuku tej krzywej od P
0
do P wyraża się wzorem
s =
∫
−
+
+
−
+
+
u
du
u
u
u
0
2
,
2
,
2
,
]
)
5
4
[(
]
)
3
[(
]
)
3
2
[(
=
=
∫
−
+
+
u
du
0
2
2
2
]
5
[
]
1
[
]
3
[
=
∫
u
du
0
35
=
35
u.
Czyli s =
35
u. Stąd u =
35
1
s.
Zatem w parametryzacji naturalnej krzywa L ma następujące równanie
r(s) = (2 + 3
35
1
s) i + (-3 +
35
1
s)j + (4 - 5
35
1
s
)k dla s
≥
0.
Wyszukiwarka
Podobne podstrony:
1 Krzywe w przestrzeni
1 1 Przestrzen wektorowa
Przestrzen wektorowa
Kodowanie nowy wykład, Przestrzenie wektorowe, 3
Przestrzen i wektory
Równanie płaszczyzny w przestrzeni, Matematyka dla Szkoły Podstawowej
PrzeróbkaPlastyczna, 1 Wyznaczanie równania krzywej umocnienia rozciągan, Maciej Młocek
przestrzenie wektorowe
Sprawko wektor przestrzenny, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i diagn. w prze
Przekształcenie do wektora przestrzennego
Wyklad BAZA W PRZESTRZENI WEKTOROWEJ, szkola, Matematyka
przestrzenie wektorowe
przestrzen wektorowa dodatkowo
04 przestrzen wektorowaid 4853 Nieznany (2)
E Szumińska Znane równania prostej na płaszczyźnie i w przestrzeni
fiz mini przymiarka , Wektor-wlkość mechaniczna, można przedstawić za pomocą usytuowanego w przestrz
wektor przestrzenny- syst.mon i diagn, Automatyka i robotyka air pwr, VI SEMESTR, Syst. monit. i dia
więcej podobnych podstron