PODSTAWOWE DEFINICJE TEORII GRAFÓW
Definicja 1
Grafem skończonym G nazywamy skończony zbiór punktów V
i
, i = l, N, zwanych
wierzchołkami i skończony zbiór linii u
i
, i = l, M, zwanych krawędziami takimi, że każda
krawędź ma dwa (niekoniecznie różne) wierzchołki jako jej punkty końcowe oraz nie prze-
chodzi ona przez inne wierzchołki. Mówimy, że krawędź jest incydentna (powiązana) z
wierzchołkiem, jeśli jest on jednym z jej końców.
Definicja 2
Graf G nazywamy skierowanym, jeśli każda jego krawędź ma określoną orientację.
Zorientowana krawędź „wychodzi” z wierzchołka, który jest jej początkiem i „wchodzi” do
wierzchołka, która jest jej końcem lub inaczej - jest względem obu wierzchołków dodatnio i
ujemnie incydentna.
Definicja 3
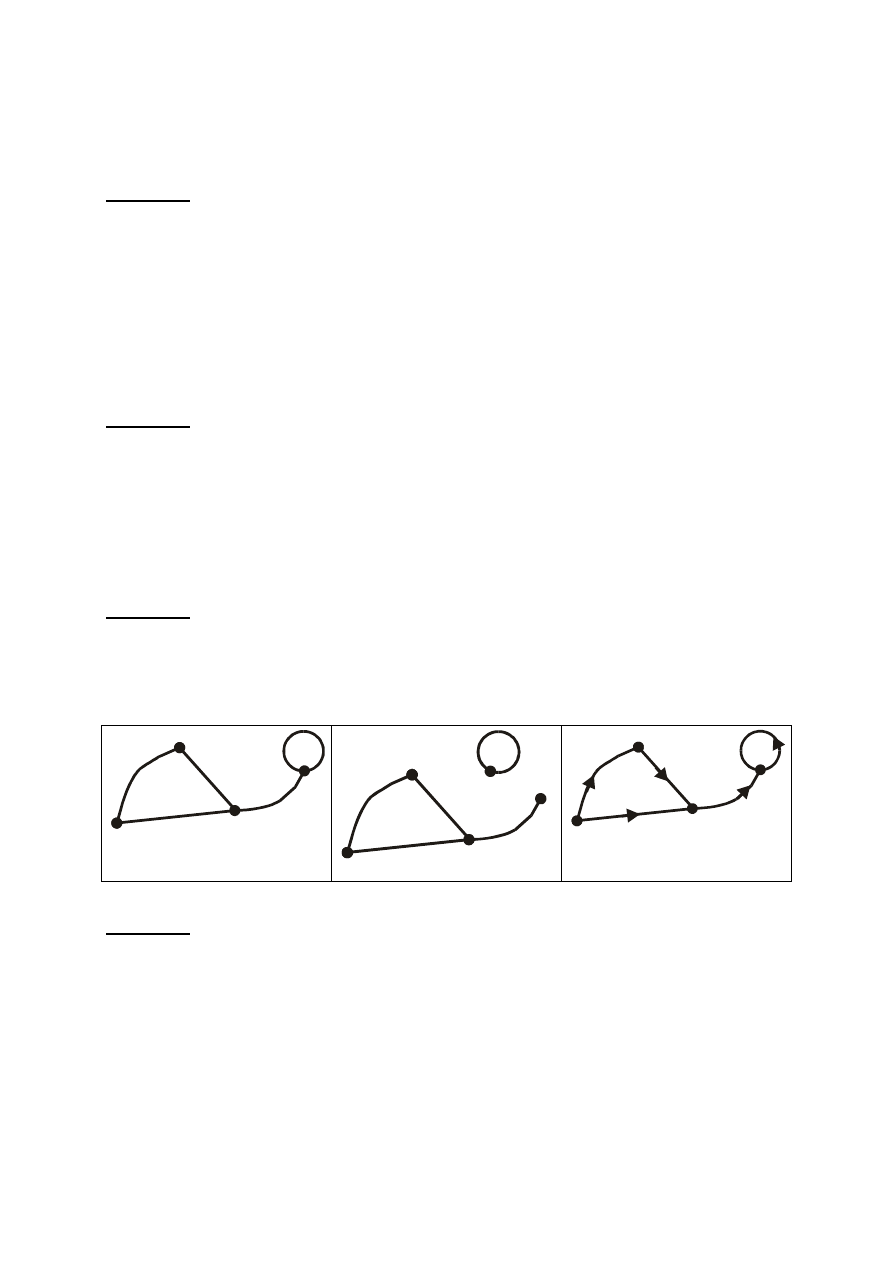
Graf G jest grafem spójnym, jeśli nie ma wierzchołków izolowanych, tzn. wierzchoł-
ków, z których nie można przejść po krawędziach grafu do dowolnego innego wierzchołka.
Na rys. 1 przedstawiono graf spójny, niespójny oraz graf spójny skierowany.
u
1
v
1
v
2
v
3
v
4
u
2
u
3
u
4
u
5
u
1
v
1
v
2
v
3
v
4
v
5
u
2
u
3
u
4
u
5
u
1
v
1
v
2
v
3
v
4
u
2
u
3
u
4
u
5
Definicja 4
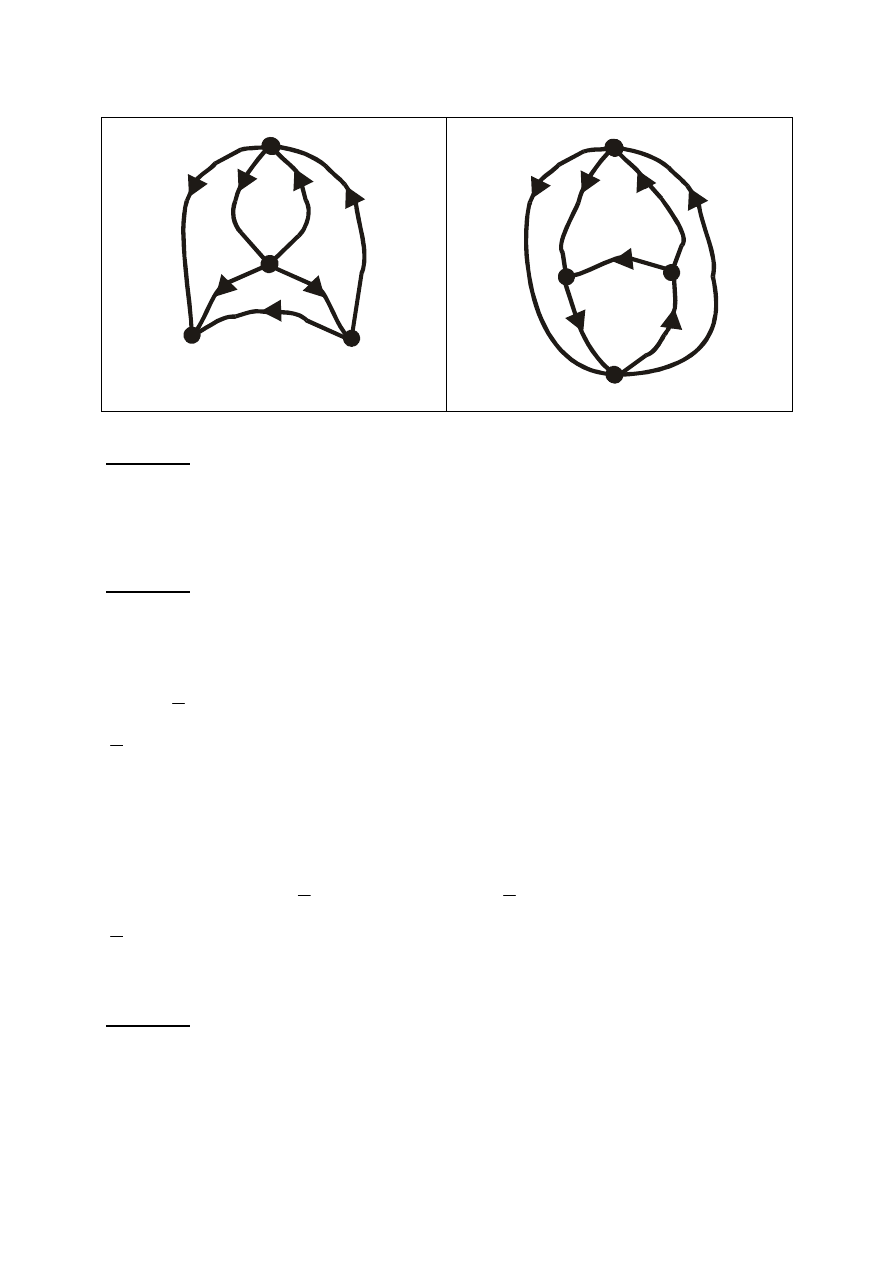
Dwa grafy są izomorficzne jeśli:
1. jest wzajemnie jednoznaczna odpowiedniość między zbiorami wierzchołków,
2. jest wzajemnie jednoznaczna odpowiedniość między ich zbiorami krawędzi,
3. zachowana jest orientacja krawędzi dla grafów zorientowanych.
v
4
v
3
v
2
v
1
u
1
u
6
u
5
u
7
u
2
u
4
u
3
v
4
v
3
v
2
v
1
u
1
u
6
u
5
u
7
u
2
u
4
u
3
Definicja 5
Ś
cieżką nazywamy ciąg różnych krawędzi takich, że dwie kolejne krawędzie w ciągu
są incydentne względem tego samego wierzchołka.
Definicja 6
Cyklem nazywamy ścieżkę, której początkowy wierzchołek zbiega się z końcowym
wierzchołkiem pierwszej i ostatniej krawędzi.
W grafie spójnym skierowanym mającym N wierzchołków i M krawędzi, każdemu
cyklowi
j
C
przyporządkowano m - wymiarowy wektor
[
]
T
MJ
j
j
C
C
C
,...
1
, gdzie:
−
+
−
i
i
a
α
jeśli krawędź u
i
jest „przechodzona”
+
i
α
razy w kierunku
C
ij
=
zgodnym z jej orientacją oraz
−
i
α
w przeciwnym
0
jeśli u
i
nie jest częścią cyklu
Dla grafu z rys. 2 wektor
j
C
odpowiadający cyklowi
j
C
=
[
u
1
, u
2
, u
3
, u
4
, u
2
, u
6
]
T
jest równy
j
C
=
[
1, -2, -1, 1, 0 , 1, 0
]
T
.
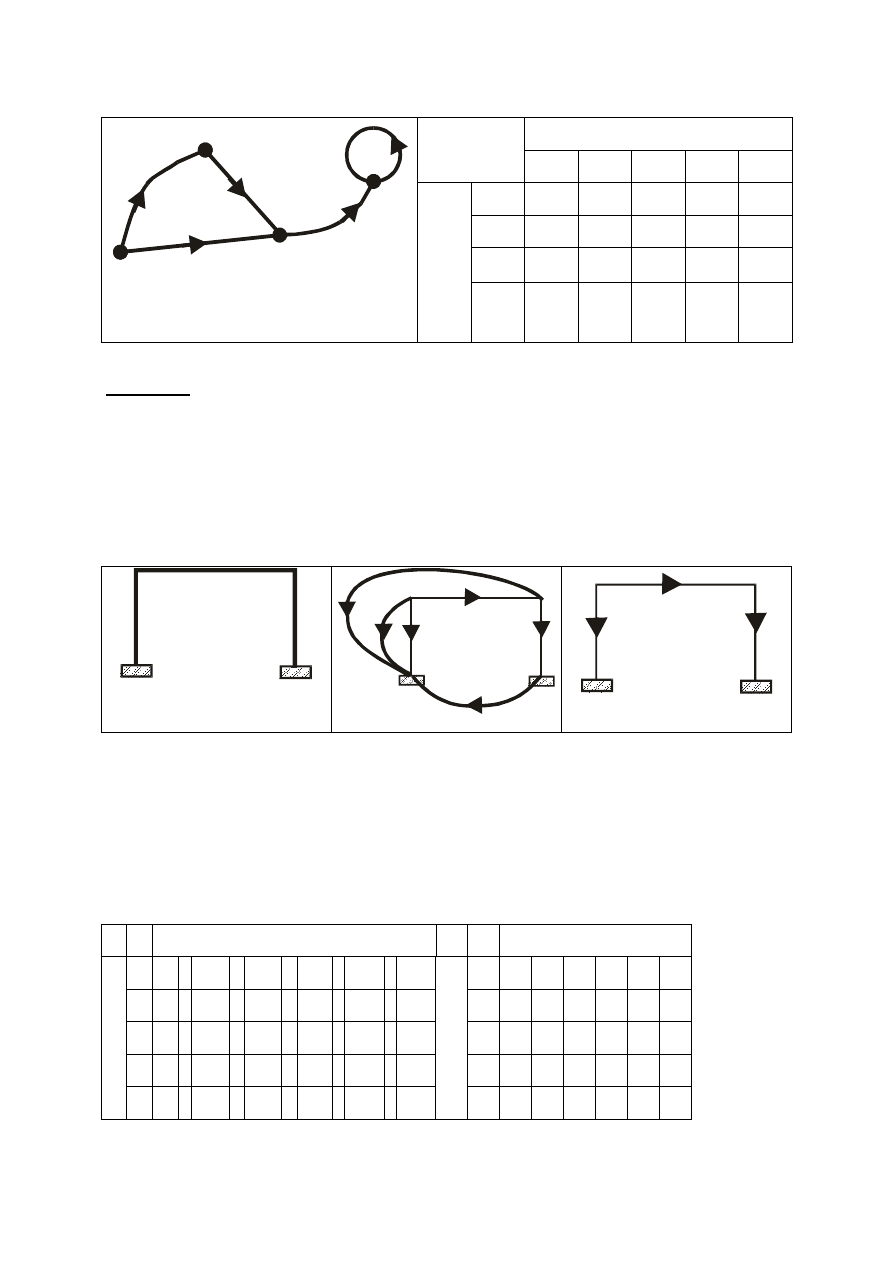
Definicja 7
Macierz T
[
t
ij
]
wymiaru N x M nazywamy macierzą incydencji wtedy, gdy:
-1
gdy u
j
„wychodzi” do wierzchołka V
i
,
t
ij
=
+1
gdy u
j
„wychodzi” z wierzchołka V
i
,
0
gdy u
j
nie ma końca w wierzchołku V
i
.
1
1
2
3
4
2
3
4
5
k r a w ę d z i e
1
2
3
4
5
w
ę
z
ł
y
1
-1
0
1
0
0
2
1
1
0
0
0
3
0
-1
-1
1
0
4
0
0
0
-1
0
Definicja 8
Grafem planarnym nazywamy graf, którego żadna dwie krawędzie nie przecinają się z
wyjątkiem punktów końcowych.
Macierz incydencji = macierz podstawowych przekrojów grafu, zawiera informacje o
sposobie połączeń wzdłuż i prętów oraz o zwrocie prętów konstrukcji.
Np. dla ramy portalowej:
a)
b)
1
1
2
3
4
2
3
4
5
6
1
1
2
3
4
2
3
a) graf podstawowy: linie grube - krawędzie pierwszego rodzaju
linie cienkie - krawędzie drugiego rodzaju
b) graf uproszczony
Macierze incydencji są następujące:
a)
b)
p r ę t y
p r ę t y
w
ę
z
ł
y
1 2
3
4
5
6
w
ę
z
ł
y
1
2
3
1 1
1
1
1
1
1
2
-1
1
1
2
-1
1
3 -1
-1
1
3
-1
4
-1
-1 -1
4
-1
Na podstawie zdefiniowanej macierzy incydencji T określona jest uogólniona macierz
incydencji H, zwana dalej macierzą incydencji.
Elementy macierzy H ustalane są następująco:
element H(i,j) jako macierz jednostkowa:
1
s
I
dla T(i,j) = 1
-
1
s
I
dla T(i,j) = -1
o
s
I
dla T(i,j) = 0
s - wskaźnik oznaczający stopień macierzy:
s = 2 - kratownica 2D
s = 3 – rama 2D
s = 3 - kratownica 3D
s = 6 - rama 3D
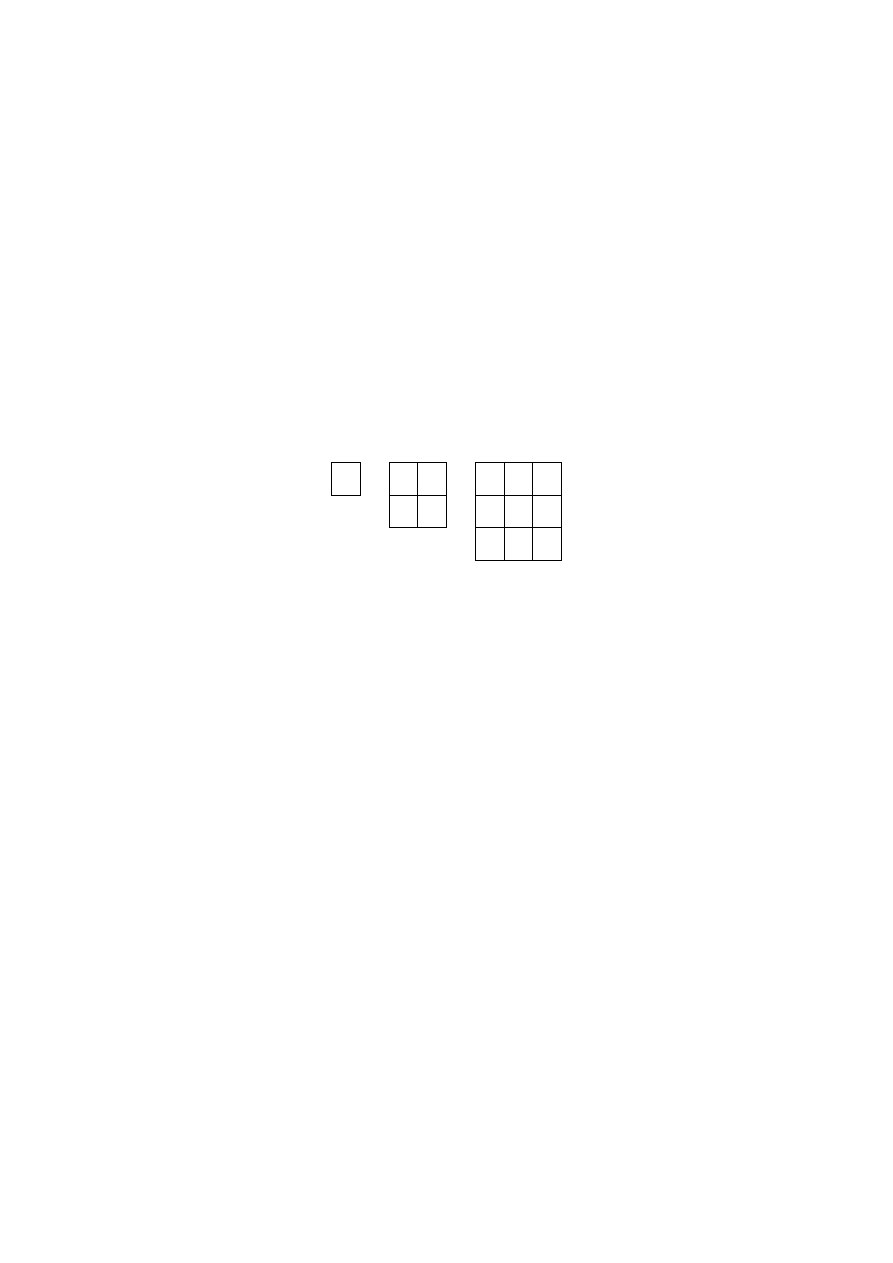
Postaci macierzy I są następujące:
1
1 0
1 0 0
0 1
0 1 0
0 0 1
s=1
s=2
s=3
Ogólnie:
f
+
dla T (i,j) = 1
H(i,j) =
f
dla T (i,j) = -1
f
o
dla T (i,j) = 0
f
+
=
[
]
o
s
s
I
I ;
1
,
f
-
=
[
]
1
;
s
o
s
I
I
,
f
o
=
[
]
o
s
o
s
I
I ;
gdzie:
1
s
I
- jest macierzą jednostkową stopnia s,
o
s
I
- jest macierzą zerową stopnia s o wymiarze s x s,
gdzie s - stopień swobody węzła konstrukcji.
Wyszukiwarka
Podobne podstrony:
Berkowski, budownictwo przemysłowe, badanie i zmiany stanu istniejących fundamentów
Berkowski, budownictwo przemysłowe, obiekty budowlane w oczyszczaniu ścieków
Berkowski, budownictwo przemysłowe, fundamenty pod maszyny
Berkowski, budownictwo przemysłowe, badanie i zmiany stanu istniejących fundamentów
Berkowski, budownictwo przemysłowe, przemysł miedziowy
Berkowski,budownictwo przemysłowe, dach płatwiowio klesczowy
Berkowski, budownictwo przemysłowe, przemysł cementowy
Budownictwo przemyslowe spis wykładów
Wymiarowanie konstrukcji wsporczej, Resources, Budownictwo, Budownictwo przemysłowe, silos żelbetowy
OPISTE~1 (2), Resources, Budownictwo, Budownictwo przemysłowe, skład klinkieru
Wydatki, NAUKA, budownictwo, BUDOWNICTWO sporo, Złota, złota, BUDOWN~1, Budownictwo przemysłowe
7sem bud przemyslowe oleszkiewicz, Budownictwo, II TOB zaoczne PP, III sem TOB, II sem TOB, II sem,
Grafy informacje
Budownictwo przemysłowe I
Podstawy Budownictwa Przemysłowego Kasia Przemysłowe
PROJEKT PRZEMYSŁOWEGO KOMINA ŻELBETOWEGO, Żelbetowe budownictwo przemysłowe, komin żelbetowy
DONTEN, Żelbetowe budownictwo przemysłowe, komin żelbetowy
Pytania BP, Budownictwo, II TOB zaoczne PP, III sem TOB, II sem TOB, II sem, budownictwo przemyslowe
więcej podobnych podstron