J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
1
Związki między składowymi stanu naprężeń
Ćwiczenie 6
w układzie prostokątnym i biegunowym – c.d.
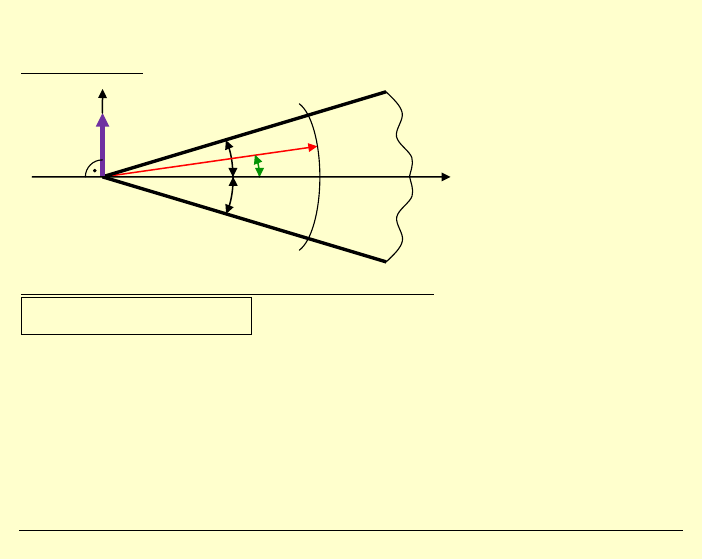
Zagadnienie:
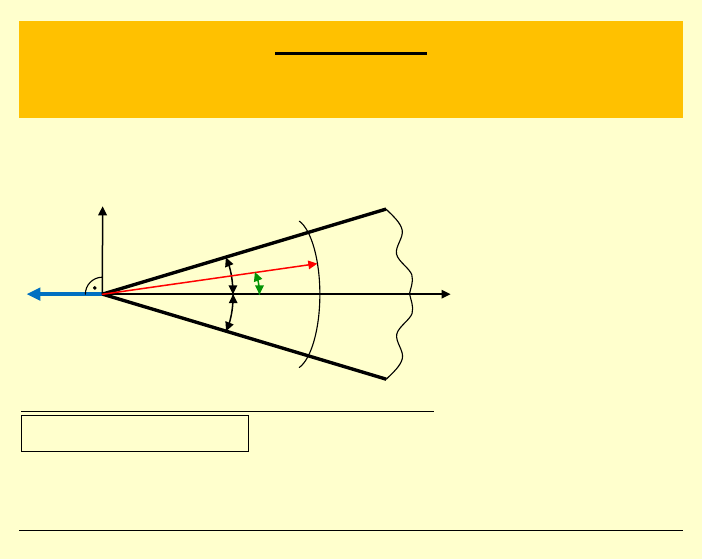
Tarcza sprężysta w postaci klina nieograniczonego
Obliczyć składowe stanu naprężenia w układzie biegunowym.
( )
,
sin
F r
C r
ϕ
ϕ
ϕ
= ⋅ ⋅ ⋅
Przewidujemy funkcję naprężeń w postaci:
, gdzie:
C
const
=
(prosta postać funkcji, podobnie jak wielomiany niższych stopni w
przypadku układu ortokartezjańskiego)
2
x
1
P
1
x
g
×
r
ϕ
α
α
,
r
ϕ
–
współrzędne
biegunowe
2
α
–
kąt wierzchołkowy
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
2
Sprawdzamy równanie biharmoniczne:
( )
,
sin
F
F r
C r
ϕ
ϕ
ϕ
=
= ⋅ ⋅ ⋅
– funkcja nap
rężeń
( )
( )
4
2
2
,
,
0
F r
F r
ϕ
ϕ
∇
= ∇ ∇
=
( )
( )
( )
( )
( )
( )
2
2
2
2
2
2
2
2
2
2
,
,
,
1
1
1
1
0
F r
F r
F r
r
r
r
r
r
r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
∂
∂
∂
∂
+ ⋅
+ ⋅
+ ⋅
+ ⋅
=
∂
∂
∂
∂
∂
∂
Obliczamy:
(
)
2
2
2
2
( , )
sin
0
F r
C r
r
r
ϕ
ϕ
ϕ
∂
∂
→
=
⋅ ⋅ ⋅
=
∂
∂
(
)
1
( , )
1
1
sin
sin
F r
C r
C
r
r
r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
→ ⋅
= ⋅
⋅ ⋅ ⋅
= ⋅ ⋅ ⋅
∂
∂
(
)
(
)
2
2
2
2
2
2
2
1
( , )
1
1
sin
sin
cos
F r
C r
C r
C r
r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
∂
→ ⋅
= ⋅
⋅ ⋅ ⋅
= ⋅
⋅ ⋅
+ ⋅ ⋅ ⋅
∂
∂
∂
(
)
(
)
2
1
cos
cos
sin
2 cos
sin
C
C r
C r
C r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ ϕ
ϕ
=
⋅
⋅ ⋅
+ ⋅ ⋅
− ⋅ ⋅ ⋅
= ⋅ ⋅
− ⋅
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
3
Operator Laplace’a we współrzędnych biegunowych:
( )
( )
( )
( )
2
2
2
2
2
2
,
,
,
1
1
,
F r
F r
F r
F r
r
r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
∂
∇
=
+ ⋅
+
⋅
∂
∂
∂
(
)
1
0
sin
2 cos
sin
C
C
r
r
ϕ
ϕ
ϕ ϕ
ϕ
= + ⋅ ⋅ ⋅
+ ⋅ ⋅
− ⋅
=
2
cos
C
r
ϕ
⋅
( )
( )
( )
( )
( )
( )
2
2
2
2
2
2
2
2
2
2
,
,
,
1
1
1
1
F r
F r
F r
r
r
r
r
r
r
r
r
ϕ
ϕ
ϕ
ϕ
ϕ
∂
∂
∂
∂
∂
∂
+ ⋅
+ ⋅
+ ⋅
+ ⋅
=
∂
∂
∂
∂
∂
∂
Równanie biharmoniczne:
( )
( )
( )
2
2
2
2
2
1
1
2
cos
C
r
r
r
r
r
ϕ
ϕ
∂
∂
∂
+ ⋅
+
⋅
⋅
=
∂
∂
∂
2
2
2
2
2
2
1
2
1
2
cos
cos
cos
C
C
C
r
r
r
r
r
r
r
ϕ
ϕ
ϕ
ϕ
∂
∂
∂
=
⋅
+ ⋅
⋅
+
⋅
⋅
=
∂
∂
∂
3
3
3
4
2
2
cos
cos
cos
0
C
C
C
r
r
r
ϕ
ϕ
ϕ
=
⋅
−
⋅
−
⋅
=
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
4
2
2
2
1
1
rr
F
F
r
r
r
σ
ϕ
∂
∂
= ⋅
+
⋅
∂
∂
Składowe stanu naprężeń:
(
)
1
sin
2 cos
sin
C
C
r
r
ϕ
ϕ
ϕ ϕ
ϕ
= ⋅ ⋅ ⋅
+ ⋅ ⋅
− ⋅
=
2
cos
C
r
ϕ
⋅
2
2
F
r
ϕϕ
σ
∂
=
=
∂
0
1
r
F
r r
ϕ
σ
ϕ
∂
∂
= −
⋅
∂
∂
(
)
1
sin
C r
r r
ϕ
ϕ
ϕ
∂
∂
= −
⋅
⋅ ⋅ ⋅
∂
∂
(
)
(
)
1
sin
cos
sin
cos
C r
C r
C
r r
r
ϕ
ϕ
ϕ
ϕ ϕ
ϕ
∂
∂
= −
⋅
⋅ ⋅
+ ⋅ ⋅ ⋅
= − ⋅
+ ⋅
=
∂
∂
0
Zatem:
d
ϕ
ϕ
α
α
2
x
1
P
1
x
g
×
rr
σ
r d
ϕ
⋅
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
5
Stałą
C
wyznaczamy z warunku równowagi względem osi
1
x
„wyciętego” fragmentu klina:
1
0
x
P
=
∑
1
0
2
cos
rr
g r d
P
α
σ
ϕ
ϕ
⋅
⋅
⋅ ⋅ ⋅
=
∫
, gdzie: g r d
element powierzchni
ϕ
⋅ ⋅
→
zatem:
1
0
2
2
cos
cos
C
g r d
P
r
α
ϕ
ϕ
ϕ
⋅
⋅
⋅
⋅ ⋅ ⋅
=
∫
(
)
2
1
0
4
cos
C g
d
P
α
ϕ
ϕ
→
⋅ ⋅
=
∫
Pomocnicze obliczenie całki:
(
)
2
2
cos
sin
d
ϕ
ϕ
ϕ ϕ
+
⋅
=
∫
(
)
2
2
1
cos
sin
sin 2
2
d
ϕ
ϕ
ϕ
ϕ
−
⋅
=
∫
dodając stronami:
2
1
1
1
cos
sin 2
2
4
d
C
ϕ ϕ
ϕ
ϕ
⋅
=
+
+
∫
odejmując stronami:
2
1
1
1
sin
sin 2
2
4
d
C
ϕ ϕ
ϕ
ϕ
⋅
=
−
+
∫
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
6
Podstawiając wynik obliczeń pomocniczych:
(
)
2
1
0
4
cos
C g
d
P
α
ϕ
ϕ
⋅ ⋅
=
∫
1
0
1
1
4
sin 2
2
4
C g
P
α
ϕ
ϕ
⋅ ⋅
+
=
1
1
1
4
sin 2
2
4
C g
P
α
α
⋅ ⋅
+
=
(
)
1
2
sin 2
C g
P
α
α
⋅ ⋅
+
=
(
)
1
2
sin 2
P
C
g
α
α
→ =
⋅
+
2
2
2
1
1
rr
F
F
r
r
r
σ
ϕ
∂
∂
= ⋅
+
⋅
∂
∂
S
tąd:
2
cos
C
r
ϕ
=
⋅
(
)
1
2
cos
2
sin 2
P
r
g
ϕ
α
α
= ⋅
⋅
⋅
+
(
)
1
2
cos
2
sin 2
rr
P
g
r
ϕ
σ
α
α
⋅
=
⋅
⋅
+
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
7
Analogia:
Podobnie postępujemy dla obciążenia tarcza sprężystej
siłą pionową
:
( )
,
cos
F r
C r
ϕ
ϕ
ϕ
= ⋅ ⋅ ⋅
Przewidujemy funkcję naprężeń w postaci:
, gdzie:
C
const
=
(prosta postać funkcji, podobnie jak wielomiany niższych stopni w
przypadku układu ortokartezjańskiego)
Równanie biharmoniczne:
dla
( )
,
cos
F
F r
C r
ϕ
ϕ
ϕ
=
= ⋅ ⋅ ⋅
–
funkcja naprężeń
( )
( )
4
2
2
,
,
0
F r
F r
ϕ
ϕ
∇
= ∇ ∇
=
→ równanie jest spełnione!
,
r
ϕ
–
współrzędne
biegunowe
2
α
–
kąt wierzchołkowy
r
ϕ
α
α
g
×
1
x
2
P
2
x
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
8
2
2
2
1
1
rr
F
F
r
r
r
σ
ϕ
∂
∂
= ⋅
+
⋅
=
∂
∂
Składowe stanu naprężeń:
2
sin
C
r
ϕ
−
⋅
2
2
F
r
ϕϕ
σ
∂
=
=
∂
0
1
r
F
r r
ϕ
σ
ϕ
∂
∂
= −
⋅
∂
∂
(
)
1
cos
C r
r r
ϕ
ϕ
ϕ
∂
∂
= −
⋅
⋅ ⋅ ⋅
∂
∂
(
)
(
)
1
cos
sin
cos
sin
C r
C r
C
r r
r
ϕ
ϕ
ϕ
ϕ ϕ
ϕ
∂
∂
= −
⋅
⋅ ⋅
+ ⋅ ⋅ ⋅
= − ⋅
+ ⋅
=
∂
∂
0
Zatem:
d
ϕ
ϕ
α
α
g
×
rr
σ
r d
ϕ
⋅
1
x
2
x
2
P
+
−
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
9
Stałą
C
wyznaczamy z warunku równowagi:
2
0
2
sin
rr
g r d
P
α
σ
ϕ
ϕ
− ⋅
⋅
⋅ ⋅ ⋅
=
∫
, gdzie: g r d
element powierzchni
ϕ
⋅ ⋅
→
zatem:
2
0
2
2
sin
sin
C
g r d
P
r
α
ϕ
ϕ
ϕ
− ⋅ −
⋅
⋅
⋅ ⋅ ⋅
=
∫
(
)
2
2
0
2
sin
C g
d
P
α
ϕ
ϕ
→
⋅ ⋅
=
∫
Podstawiając wynik obliczeń pomocniczych:
2
0
1
1
4
sin 2
2
4
C g
P
α
ϕ
ϕ
⋅ ⋅
−
=
2
1
1
4
sin 2
2
4
C g
P
α
α
→
⋅ ⋅
−
=
(
)
2
2
sin 2
C g
P
α
α
⋅ ⋅
−
=
(
)
2
2
sin 2
P
C
g
α
α
→ =
⋅
−
S
tąd:
rr
σ
=
(
)
2
2
sin
2
sin 2
P
r
g
ϕ
α
α
− ⋅
⋅
⋅
−
(
)
2
2
sin
2
sin 2
rr
P
g
r
ϕ
σ
α
α
⋅
= −
⋅
⋅
−
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
10
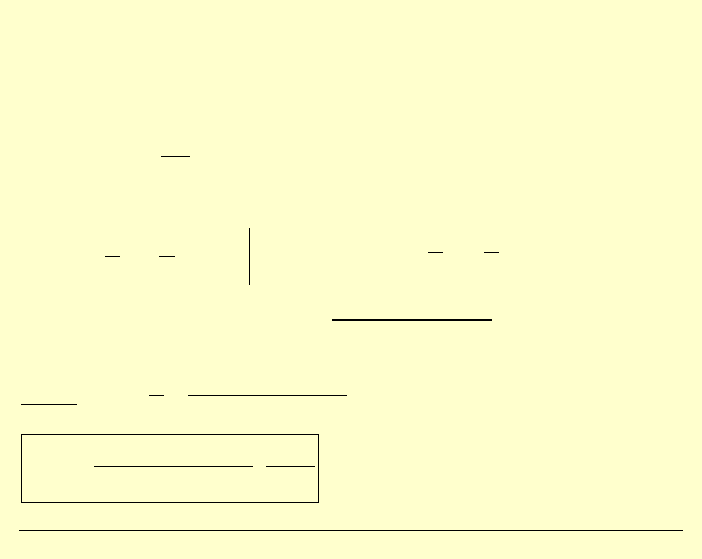
Przypadek szczególny:
tarcza półnieskończona, obciążona siłą
skupioną na brzegu (tzw. zagadnienie Flamanta):
2
cos
rr
P
g
r
ϕ
σ
π
⋅
= −
⋅
⋅
0
r
ϕ
σ
=
0
ϕϕ
σ
=
Punkt osobliwy rozwiązania teorii sprężystości
0
rr
r
σ
→ ⇒
→ ∞
:
Uwaga:
Przez zmianę modelu ciała na model sprężysto–plastyczny
unikamy tej
osobliwości!
r
ϕ
rr
σ
1
x
P
2
x
g
×
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
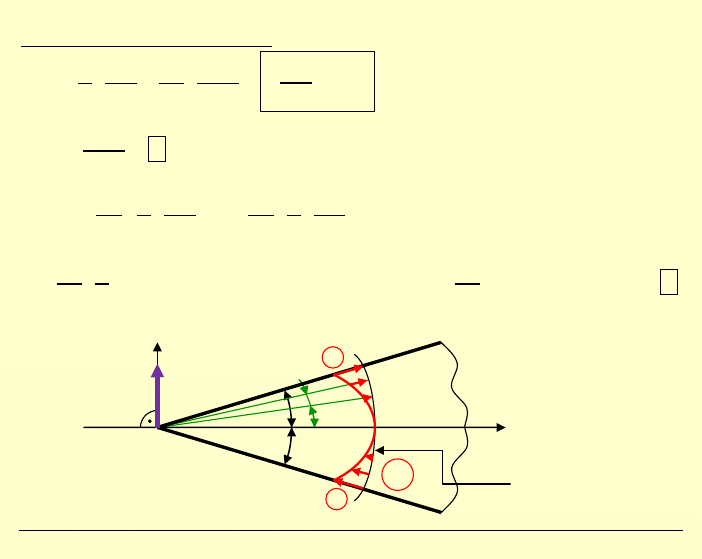
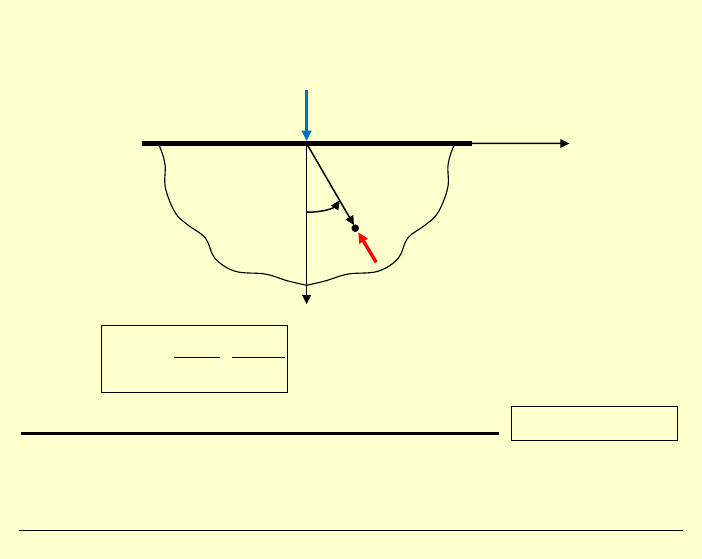
11
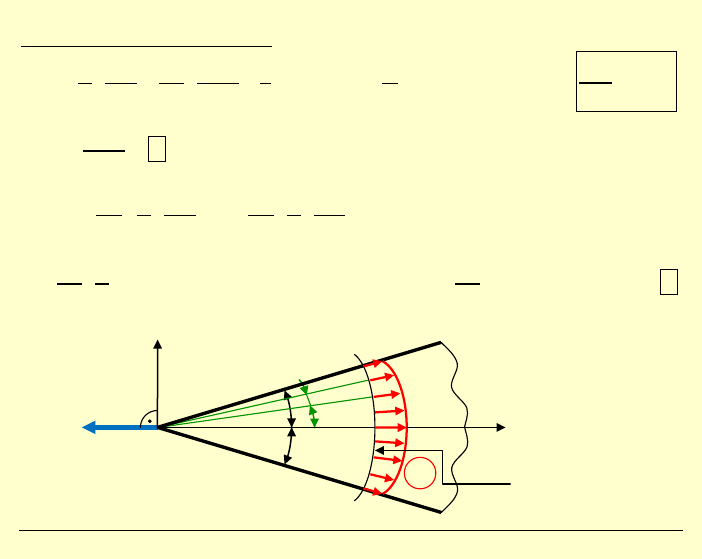
Interpretacja rozkładu naprężeń:
Kon
struujemy rodzinę okręgów stycznych do krawędzi tarczy,
wszystkie o promieniach
R
.
stąd:
cos
2
r
R
ϕ
=
Wzór na naprężenia normalne:
2
cos
rr
P
g
r
ϕ
σ
π
⋅
= −
⋅
=
⋅
P
g R
π
−
⋅ ⋅
ϕ
rr
σ
r
1
x
P
2
x
g
×
2R
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
12
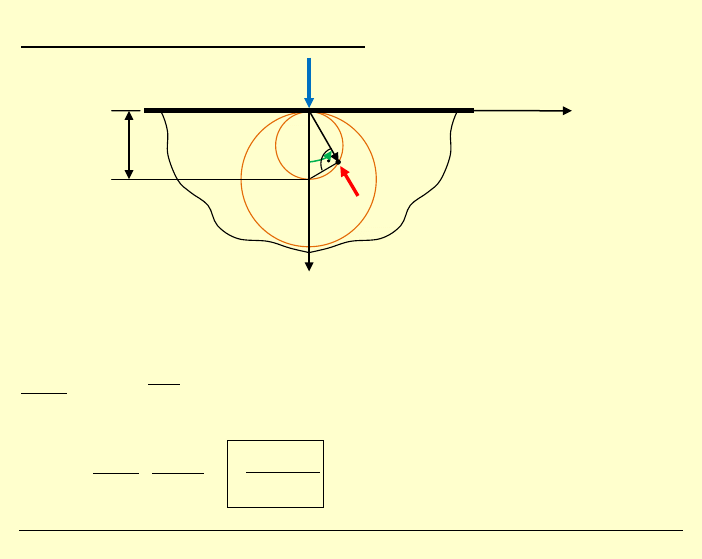
Mamy:
rr
P
g R
σ
π
= −
⋅ ⋅
Wniosek:
N
aprężenie radialne jest stałe
R
na każdym okręgu o promieniu !
Ponieważ
(1)
0
ϕϕ
σ
σ
=
=
oraz
(2)
rr
σ
σ
=
są naprężeniami głównymi
(gdyż:
0
r
ϕ
σ
= ), to
największą wartość naprężenia stycznego
(1)
(2)
max
2
2
P
const
g R
σ
σ
τ
π
−
=
=
=
⋅ ⋅
w punkcie otrzymamy ze wzoru:
na okręgu o promieniu
R
(do porównania z Wytrzymałością Materiałów)
Linie te
można wyznaczyć eksperymentalnie, za pomocą
elastooptyki (fotosprężystości)!
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
13
Naprężenia w układzie ortokartezjańskim:
Na podstawie wzorów odwrotnych
2
11
cos
rr
σ
σ
ϕ
=
⋅
otrzymamy:
2
2
cos
cos
P
g
r
ϕ
ϕ
π
⋅
= −
⋅
⋅
⋅
3
2
cos
P
g
r
ϕ
π
⋅
= −
⋅
⋅
zatem:
3
1
11
4
2
x
P
g
r
σ
π
⋅
= −
⋅
⋅
, gdzie:
(
)
2
2
2
4
2
2
1
2
1
2
r
x
x
r
x
x
=
+
⇒
=
+
przy czym:
1
0
x
≥
!
2
2
1 2
22
4
2
sin
x x
P
g
r
ϕϕ
σ
σ
ϕ
π
⋅
=
⋅
= −
⋅
⋅
Analogicznie:
oraz:
2
1
2
12
21
4
2
sin
cos
r
x x
P
g
r
ϕ
σ
σ
σ
ϕ
ϕ
π
⋅
=
=
⋅
⋅
= −
⋅
⋅
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
14
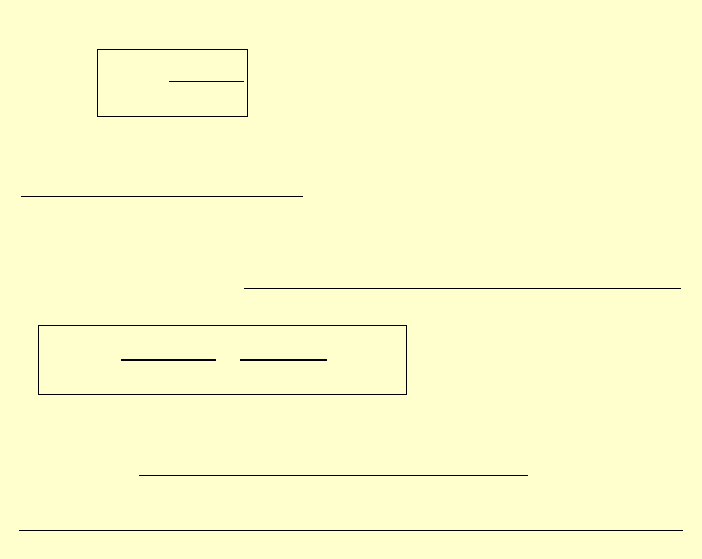
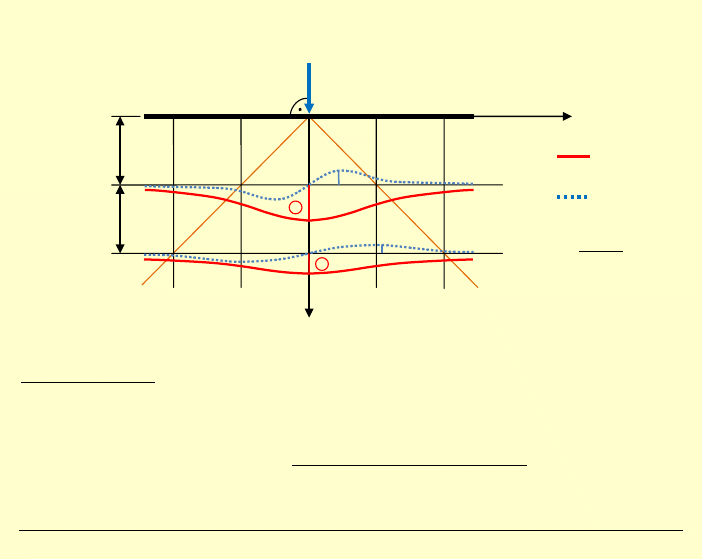
Wykresy
11
σ
oraz
12
σ
dla
1
x
const
=
:
Praktycznie: wykresy te opisuj
ą zagadnienie „rozchodzenia się”
siły skupionej w ośrodku izotropowym, jednorodnym.
Poza trójkątem równoramiennym, zakreślanym przez proste
nachylone pod kątem 45°, dla celów inżynierskich
0, 208
można przyjąć
naprężenia jako równe zeru!
1
x
R
P
2
x
R
R
−
2R
−
2R
+
R
+
0, 637
0, 318
0,159
0, 080
11
σ
12
σ
P
g R
×
⋅
−
−
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
15
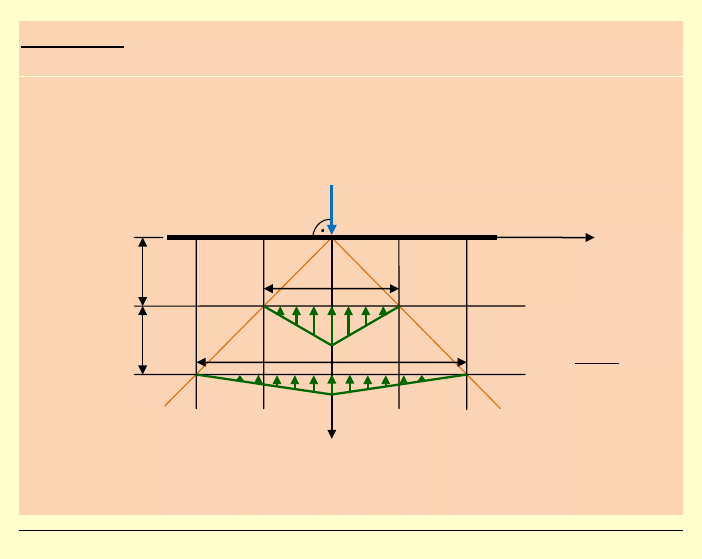
Dyskusja!
1) Przybliżenia rozkładów naprężeń
a)
rozkład trójkątny:
(
przybliżenie po stronie bezpiecznej)
1
x
R
P
2
x
R
R
−
2R
−
2R
+
R
+
1, 0
0, 5
P
g R
×
⋅
2R
4R
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
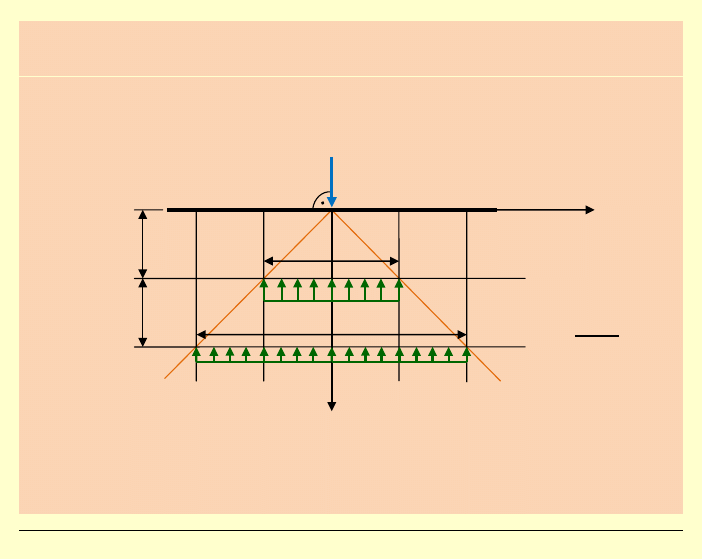
16
b)
rozkład równomierny:
(
przybliżenie po stronie niebezpiecznej, ale z użytecznym wynikiem)
1
x
R
P
2
x
R
R
−
2R
−
2R
+
R
+
0, 5
0, 25
P
g R
×
⋅
2R
4R
J. Górski, M. Skowronek,
M. Gołota, K. Winkelmann • Teoria sprężystości i plastyczności – Ćwicz. 6 • KMBiM WILiŚ PG
17
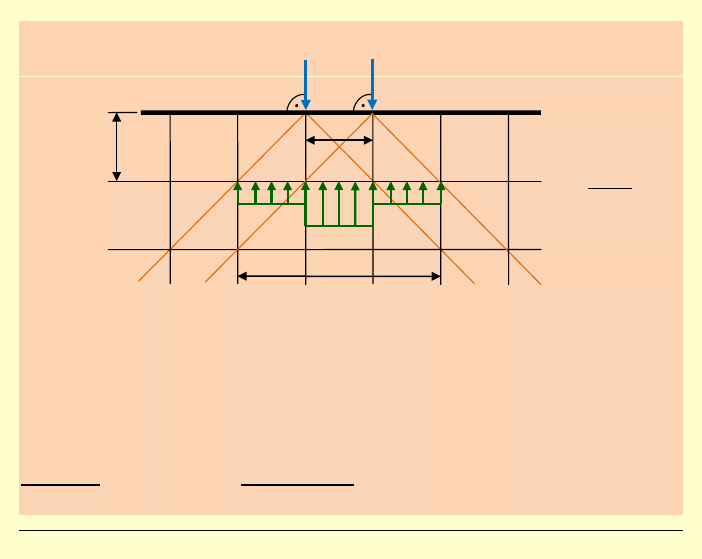
2) Superpozycja stanów
naprężenia, przykładowo:
3) Zastosowania praktyczne:
→ otwory montażowe w ścianie (poza strefą naprężeń)
→ można obliczyć wysokość, od której w ścianie obciążonej siłami
skupionymi użyty materiał może być słabszy
Uwaga: Wzory na
naprężenia dla tarcz obciążonych siłami
skupionymi (PSN) są słuszne również dla PSO!
R
R
P
P
3R
0, 5
0, 5
1, 0
P
g R
×
⋅
Document Outline
Wyszukiwarka
Podobne podstrony:
34) TSiP 2010 11 ćw13
25) TSiP 2010 11 ćw07
30) TSiP 2010 11 ćw09
35) TSiP 2010 11 ćw11
36) TSiP 2010 11 ćw12
31) TSiP 2010 11 ćw10
29) TSiP 2010 11 ćw08
37) TSiP 2010 11 ćw14
34) TSiP 2010 11 ćw13
25) TSiP 2010 11 ćw07
30) TSiP 2010 11 ćw09
więcej podobnych podstron