Roboty przemysłowe
KRIM, AGH w Krakowie
1
Katedra Robotyki i Mechatroniki
Akademia Górniczo-Hutnicza w Krakowie
Wojciech Lisowski
3-4
Wymagania, kryteria oceny, parametry i charakterystyki
manipulatorów robotów przemysłowych
Roboty Przemysłowe
Roboty przemysłowe
KRIM, AGH w Krakowie
2
Zagadnienia:
Wymagania stawiane robotom manipulacyjnym
Kryteria oceny robotów manipulacyjnych
Klasyfikacja parametrów i charakterystyk robotów
manipulacyjnych
Ruchliwość łańcucha kinematycznego
manipulatora a liczba stopni swobody efektora
Przyczyny powstawania błędów pozycjonowania
Dokładność a powtarzalność pozycjonowania
Udźwig nominalny
Drgania własne manipulatorów
Roboty przemysłowe
KRIM, AGH w Krakowie
3
Wprowadzenie
Manipulacyjny robot przemysłowy został zaprojektowany i
zastosowany na skutek rozwoju obrabiarek i systemów obróbkowych
NC/CNC.
Pierwsze zastosowania robotów manipulacyjnych – to często obsługa
obrabiarek NC, pras lub paletyzacja (czynności manipulacyjne).
Pierwsze roboty były projektowane wg zasad projektowania urządzeń
NC
.
SPECYFIKA OBRABIAREK:
PRECYZJA osiągana przez dużą SZTYWNOŚĆ -> DUŻA MASA
ruch Z USTALONĄ PRĘDKOŚCIĄ i USTALONYM
ZAKRESEM OBCIĄŻEŃ DYNAMICZNYCH
większa część masy NIERUCHOMA

Roboty przemysłowe
KRIM, AGH w Krakowie
4
SPECYFIKA ROBOTA MANIPULACYJNEGO
PRECYZJA osiągana biernie przez dużą SZTYWNOŚĆ -> ale DUŻA
MASA niedopuszczalna, lub czynnie przez odpowiedni algorytm
sterowania ruchem manipulatora
PRECYZJA może być polepszona poprzez ZMNIEJSZENIE V
MAX
,
A
MAX
ruch ze ZMIENNĄ PRĘDKOŚCIĄ, ZATRZYMANIA, NAWROTY
wymagana szybka ODPOWIEDŹ DYNAMICZNA - MASA/
BEZWŁADNOŚĆ OGRANICZONA
EKSTREMALNE OBCIĄŻENIA występują tylko w pewnych
odcinkach cyklu pracy, tylko w pewnych z klasy możliwych do
wykonania operacji technologicznych
OBCIĄŻENIA DYNAMICZNE mogą być zmniejszone poprzez
ZMNIEJSZENIE V
MAX
, A
MAX
większa część masy RUCHOMA

Roboty przemysłowe
KRIM, AGH w Krakowie
5
W rezultacie ROBOT zaprojektowany jako URZĄDZENIE NC był:
• CIĘŻKI
• WOLNY
• KOSZTOWNY
co powodowało, że nie dawał się efektywnie zastosować w operacjach:
MONTAŻU
OBRÓBKI
INSPEKCJI

Roboty przemysłowe
KRIM, AGH w Krakowie
6
WYMAGANIA STAWIANE ROBOTOM
A - WYMAGANIA KINEMATYCZNE I DYNAMICZNE:
• duża prędkość ruchu efektora
• duże przyspieszenie ruchu efektora
• duże obciążenie robocze
B - WYMAGANIA DOKŁADNOŚCIOWE
• duża precyzja pozycjonowania efektora
• duża precyzja śledzenia toru ruchu przez efektor
C - WYMAGANIA EKONOMICZNE
• materiałooszczędność konstrukcji robota
• energooszczędność pracy robota
• niezawodność
• niskie koszty obsługi
Roboty przemysłowe
KRIM, AGH w Krakowie
7
KRYTERIA OCENY ROBOTÓW
KRYT
SZTYWNOSC
MASA BEZWLADNOSC
1
=
/
Ocena części mechanicznej robota - manipulatora
Ocena napędów manipulatora robota
KRYT
MOC NAPEDU
MASA NAPEDU
2
=
_
_
Ocena robota jako całości: manipulatora, napędu i układu
sterowania ruchem efektora
KRYT
MASA BEZWLADNOSC OBCIAZENIA ROBOCZEGO
MASA BEZWLADNOSC MANIPULATORA
3
=
/
_
_
/
_
Roboty przemysłowe
KRIM, AGH w Krakowie
8
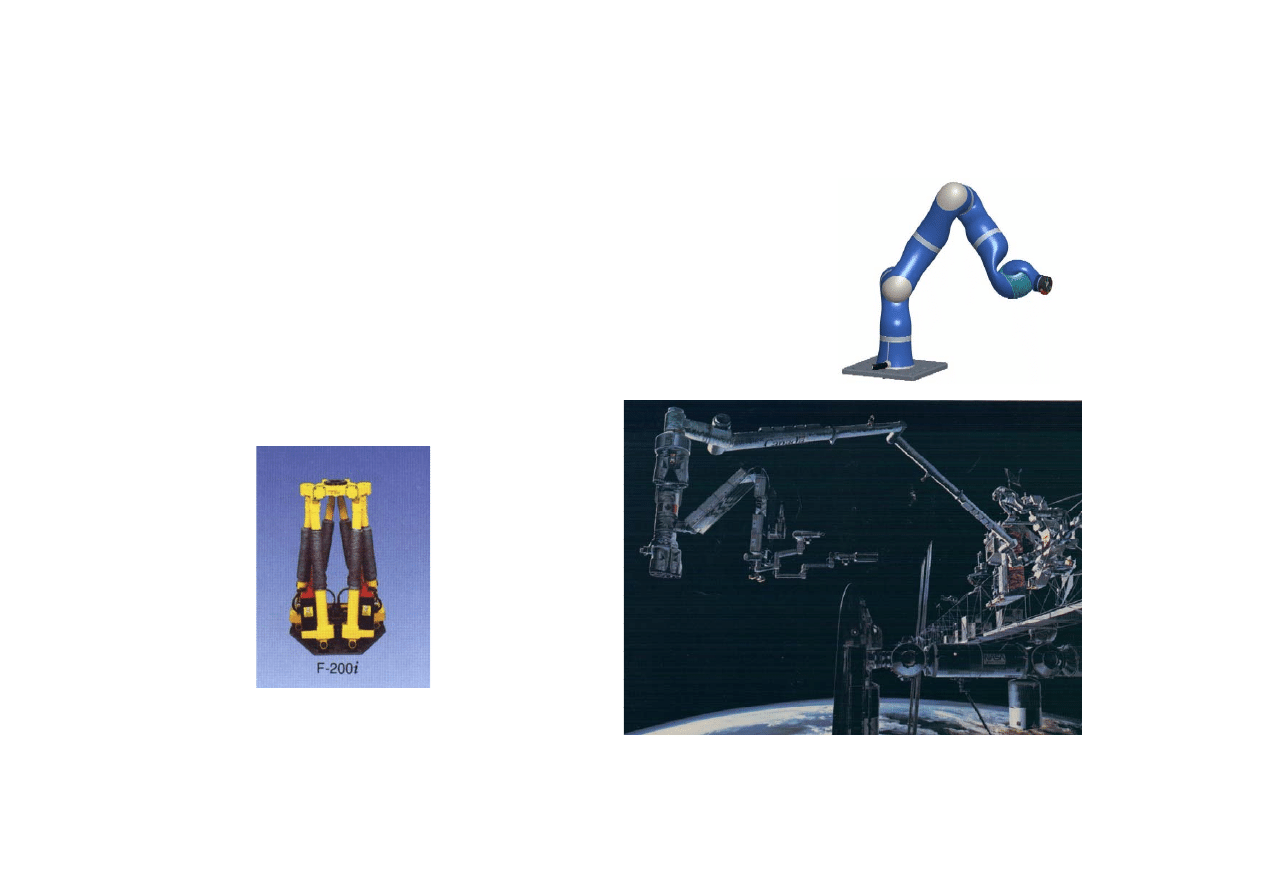
Zakres wartości KRYT
3
dla robotów manipulacyjnych: 0.03 - 0.15
IRb 6
0.04
PUMA 560
0.06
Adept 3 (SCARA)
0.12
(DLR LWR III)
Fanuc F-200i (platforma) 0.52
DLR LWR III 1.15
SRMS (450 kg) 60.00
Człowiek
0.20
(SRMS – Fjeld)
(Fanuc F200i)

Roboty przemysłowe
KRIM, AGH w Krakowie
9
Parametry i charakterystyki robotów
Parametry funkcjonalne
Parametry eksploatacyjne
Parametry obsługi
Parametry układu sterowania i nadzorowania pracy robota
Parametry układu zasilania
Parametry mechaniczne

Roboty przemysłowe
KRIM, AGH w Krakowie
10
PARAMETRY FUNKCJONALNE
Zakres zastosowań (operacje, chwytaki, narzędzia)
Programowanie, sterowanie i nadzorowanie pracy (system
operacyjny, języki programowania, interfejs graficzny I/O)
Integracja ze stanowiskiem (układy sensoryczne)
PARAMETRY EKSPLOATACYJNE
Niezawodność
Trwałość
Wymogi konserwacji i serwis
Efektywność działania systemu diagnostycznego.
Efektywność ekonomiczna (koszty: zakupu, instalacji,
oprogramowania, eksploatacji, serwisu)

Roboty przemysłowe
KRIM, AGH w Krakowie
11
PARAMETRY OBSŁUGI
:
Bezpieczeństwo
użytkownika (stop bezpieczeństwa, zamknięcie PR.)
manipulatora (zabezpieczenie przed nieuprawnionym użyciem,
wrażliwość na błędy operatora)
operacji technologicznej (utrata zasilania, wrażliwość na zmiany
temperatury, wilgotności powietrza, pole elektromagnetyczne,
zanieczyszczenia)
Ergonomia
PARAMETRY UKŁADU STEROWANIA
I NADZOROWANIA PRACY ROBOTA
architektura, skala integracji, implementacja, algorytmy, integracja
PARAMETRY UKŁADU ZASILANIA
źródło energii, wzmacniacz mocy (modulacja i dystrybucja energii),
moc, napięcie i natężenie prądu, różnica ciśnień i natężenie przepływu
Roboty przemysłowe
KRIM, AGH w Krakowie
12
MECHANICZNE PARAMETRY I CHARAKTERYSTYKI
MANIPULATORÓW ROBOTÓW
GEOMETRYCZNE
KINEMATYCZNE
DYNAMICZNE
Problemy:
brak ścisłych definicji części z parametrów, co utrudnia porównywanie
manipulatorów - normy:
ISO 9283 'Manipulating industrial robots - Performance criteria and
related test methods'
PN-EN 29283 Roboty przemysłowe. Metody badania charakterystyk
funkcjonalnych
obie aktualnie obejmują tylko część parametrów
większość parametrów jest powiązana ze sobą
parametry osiągają różne wartości w różnych obszarach PR.

Roboty przemysłowe
KRIM, AGH w Krakowie
13
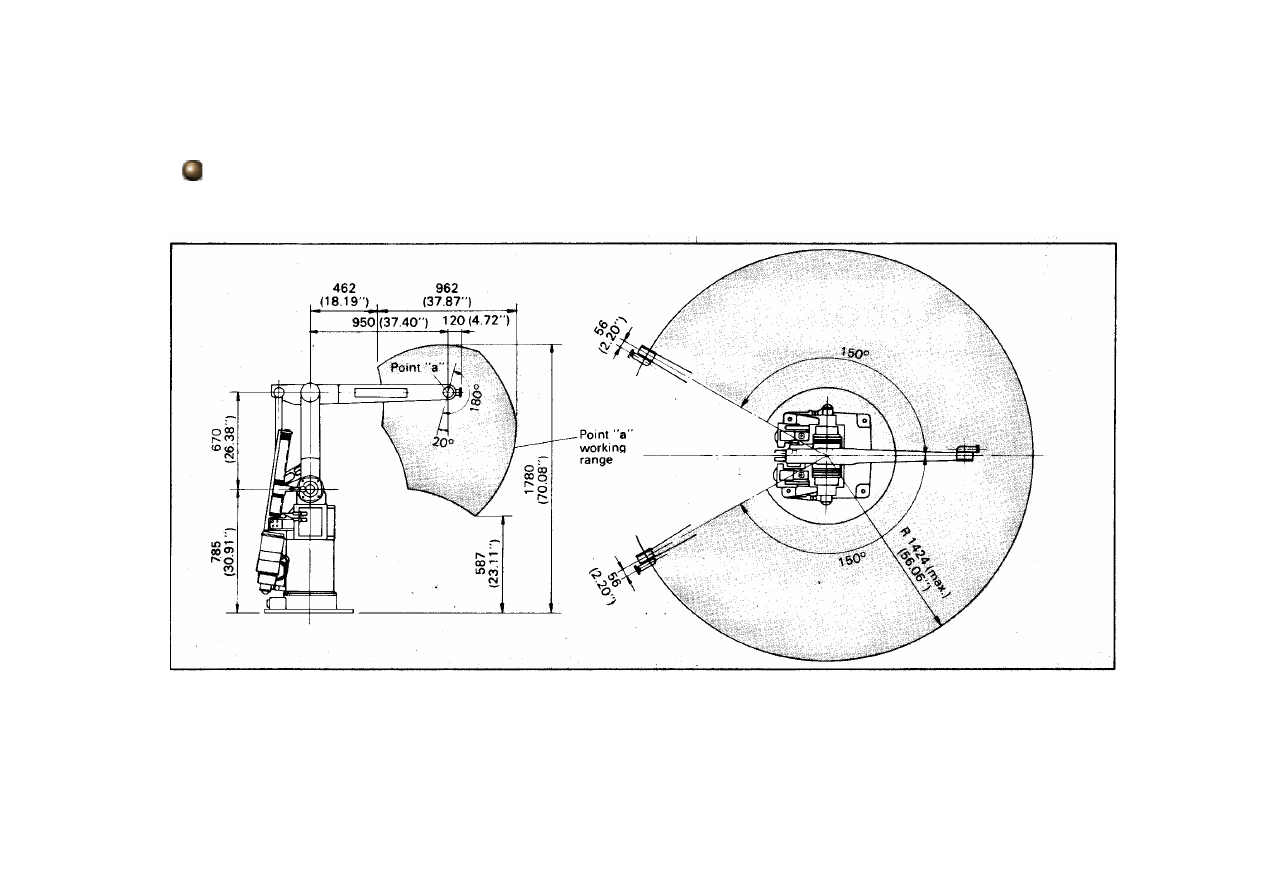
PARAMETRY GEOMETRYCZNE - PRZESTRZEŃ ROBOCZA
STRUKTURA MANIPULATORA
ZAKRESY RUCHÓW
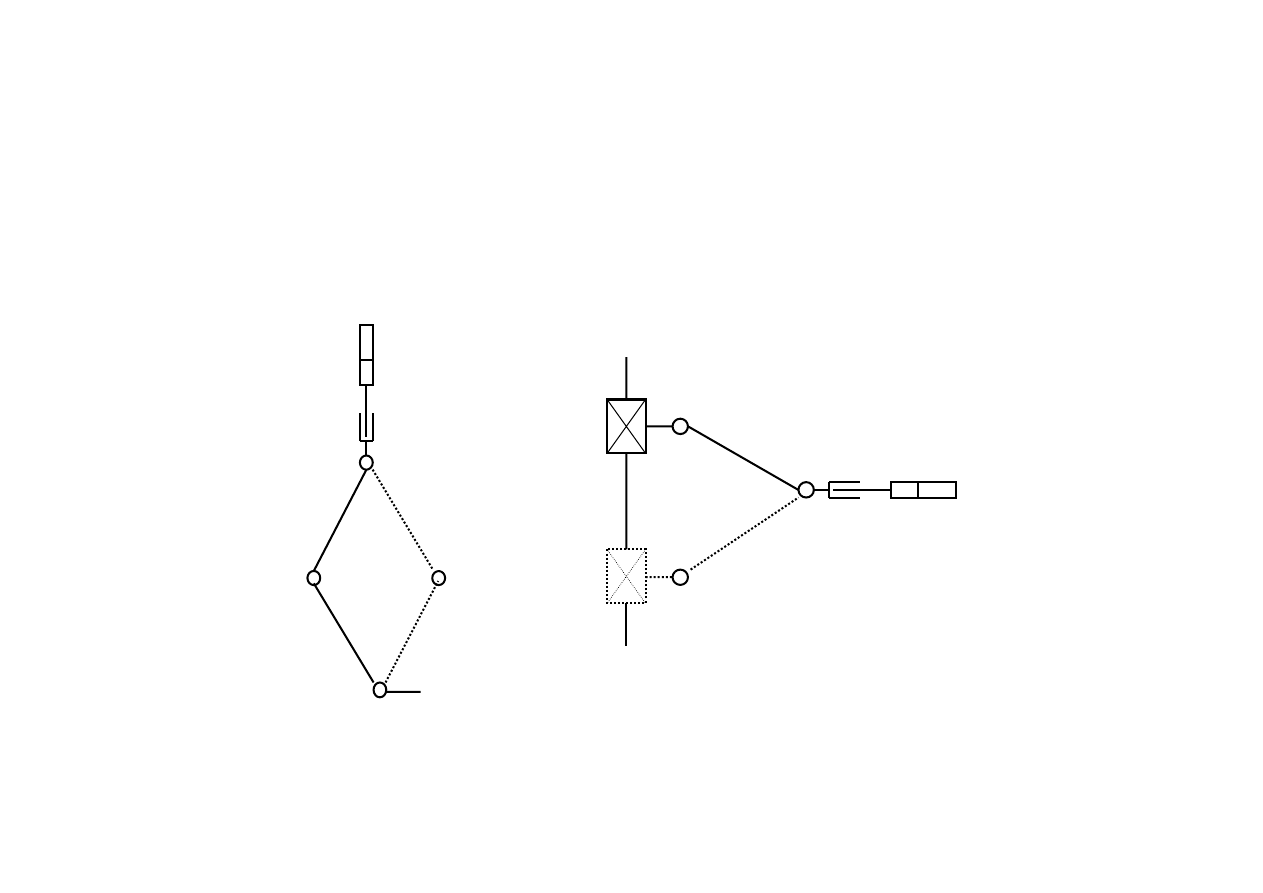
RUCHLIWOŚĆ ŁAŃCUCHA KINEMATYCZNEGO
MANIPULATORA
LICZBA STOPNI SWOBODY EFEKTORA
NIEJEDNOZNACZNOŚCI GEOMETRYCZNE

Roboty przemysłowe
KRIM, AGH w Krakowie
14
Przestrzeń Robocza to zbiór pozycji (położeń i orientacji) efektora/
kołnierza kiści, które może on osiągnąć.
STRUKTURA MANIPULATORA
sposób wzajemnego połączenia ruchowego ze sobą kolejnych członów
manipulatora
Cechy:
człony czynne i bierne
manipulator tworzy łańcuch kinematyczny o 2 końcach (podstawa –
efektor) otwarty lub zamknięty
zmienny przestrzenny układ członów w czasie pracy manipulatora

Roboty przemysłowe
KRIM, AGH w Krakowie
15
RUCHLIWOŚĆ ŁAŃCUCHA KINEMATYCZNEGO
MANIPULATORA (DOM)
DOM
n
iP
i
i
n
=
−
=
∑
6
1
Ruchliwość określa liczbę napędów konieczną do nadania
jednoznacznego ruchu mechanizmowi.
LICZBA STOPNI SWOBODY EFEKTORA (DOF)
Liczba niezależnych współrzędnych opisujących położenie i
orientację efektora jako bryły w przestrzeni 3D.
Bryła swobodna w przestrzeni 3D ma 6 DOF
Roboty przemysłowe
KRIM, AGH w Krakowie
16
ZAKRESY RUCHÓW
zakresy ruchów względnych członów w przestrzeni współrzędnych
złączowych
Yaskawa Motoman Model L3W
Roboty przemysłowe
KRIM, AGH w Krakowie
17
w przestrzeni kartezjańskiej
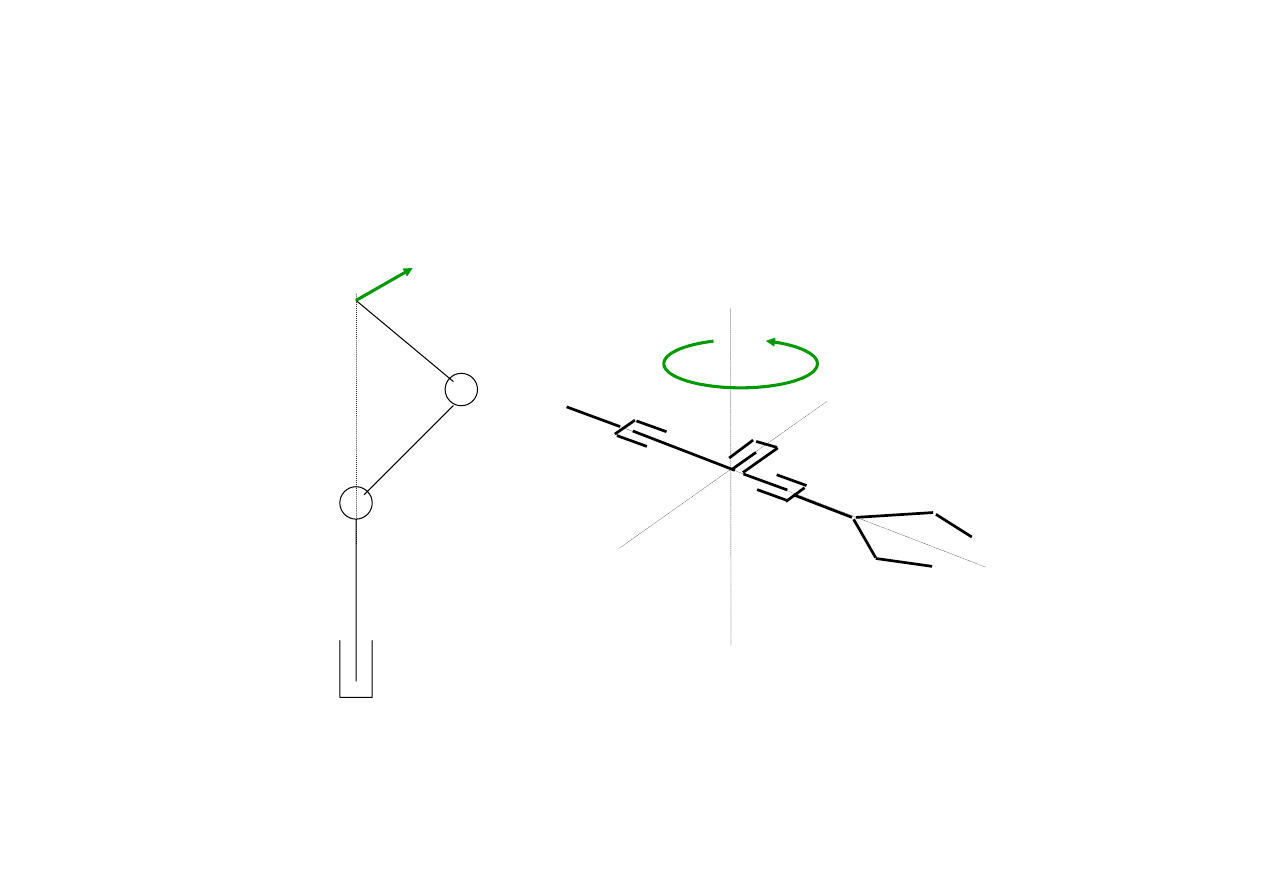
kształt
objętość
współczynnik manewrowości (kąt serwisu)
S
=
θ
π
4
θ jest kątem bryłowym ograniczającym możliwe do przyjęcia orientacje
w danym punkcie PR.
Roboty przemysłowe
KRIM, AGH w Krakowie
18
NIEJEDNOZNACZNOŚCI GEOMETRYCZNE
Problem uzyskiwania pozycji w więcej niż w jednym
wzajemnym ustawieniu członów (skończona liczba).
DOF=DOM cecha struktury RR, RP
Roboty przemysłowe
KRIM, AGH w Krakowie
19
Problem uzyskiwania pozycji w nieograniczonej liczbie wzajemnych
ustawień członów jako wynik struktury manipulatora.
DOM>DOF manipulatory nadmiarowe (redundantne)
IA 20 Motoman
7 DOM manipulator
Roboty przemysłowe
KRIM, AGH w Krakowie
20
Problem uzyskiwania pozycji w nieograniczonej liczbie
wzajemnych ustawień członów na skutek degeneracji PR.
DOM=DOF pozycje osobliwe
v =0
ω=0
Roboty przemysłowe
KRIM, AGH w Krakowie
21
PARAMETRY GEOMETRYCZNE - CHARAKTERYSTYKI
DOKŁADNOŚCIOWE
DOKŁADNOŚĆ I POWTARZALNOŚĆ:
•
POZYCJONOWANIA
•
ŚLEDZENIA TORU RUCHU
obejmują położenie i orientację
Roboty przemysłowe
KRIM, AGH w Krakowie
22
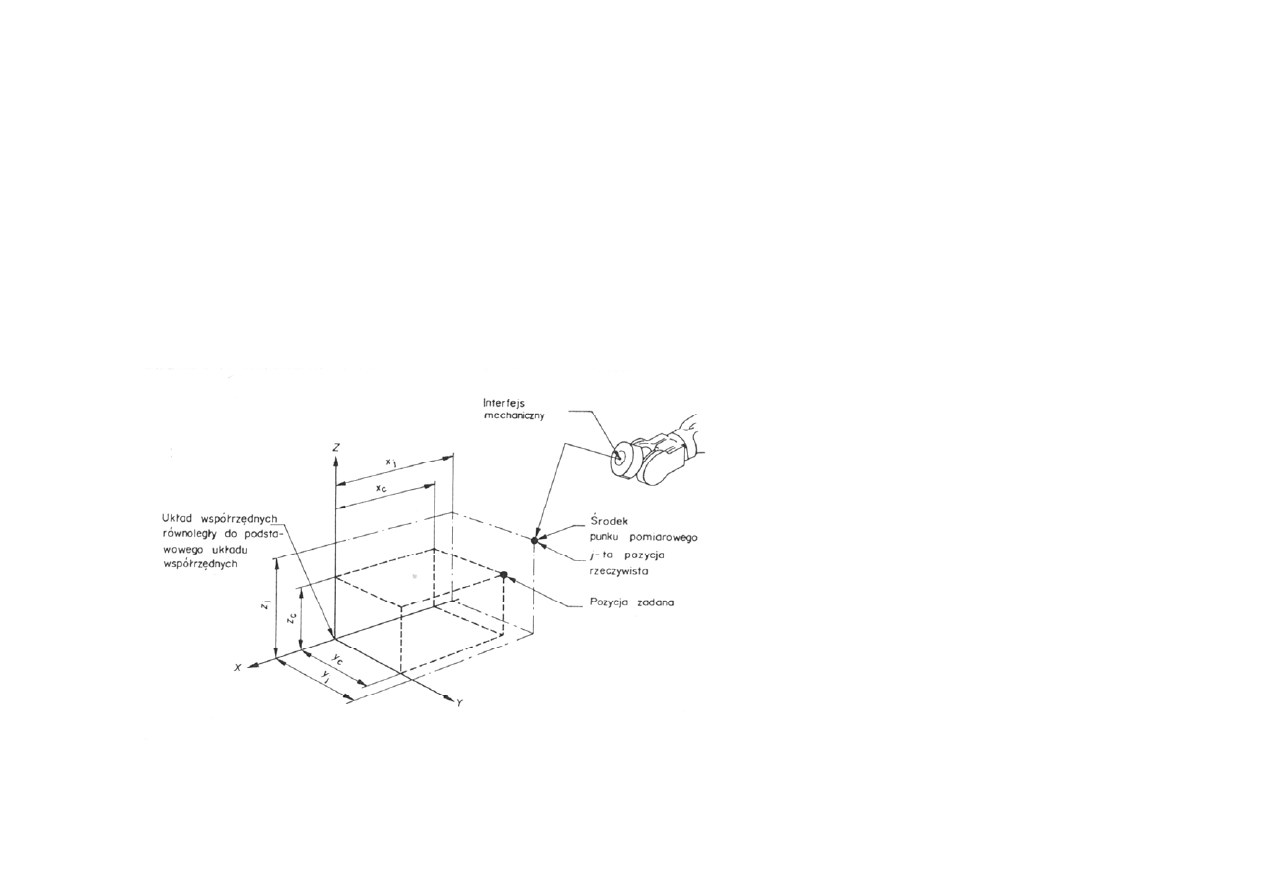
DOKŁADNOŚĆ I POWTARZALNOŚĆ POZYCJONOWANIA
pozycja=położenie+orientacja
DOKŁADNOŚĆ: różnica między wielkością zadaną a średnią
krzywej dystrybucji osiągniętej wielkości dla liczby prób n->
∞
POWTARZALNOŚĆ: szerokość krzywej dystrybucji
Programowanie:
- przez uczenie
- bezpośrednie
pozycja zadana i osiągnięta
(rzeczywista)
Roboty przemysłowe
KRIM, AGH w Krakowie
23
Na błędy pozycjonowania wpływ mają:
sterowanie (algorytm, implementacja, sterownik)
precyzja i adekwatność modelu geometrycznego
błędy, tolerancje wymiarów i położenia
tarcie, luz i podatność mechanizmów manipulatora
czynniki otoczenia (np. temperatura)
prędkość, przyspieszenie ruchu
obciążenie robocze
Pożądana Powtarzalność Pozycjonowania i Odtwarzania Toru
Ruchu
0.025 mm przy v=5-15m/s
malowanie: v=1.5 m/s RP=
±10.0 mm
spawanie:
v=1.0 m/s RP=
±0.5 mm
uszczelnianie: v=1.5 m/s RP=
±0.5 mm
Roboty przemysłowe
KRIM, AGH w Krakowie
24
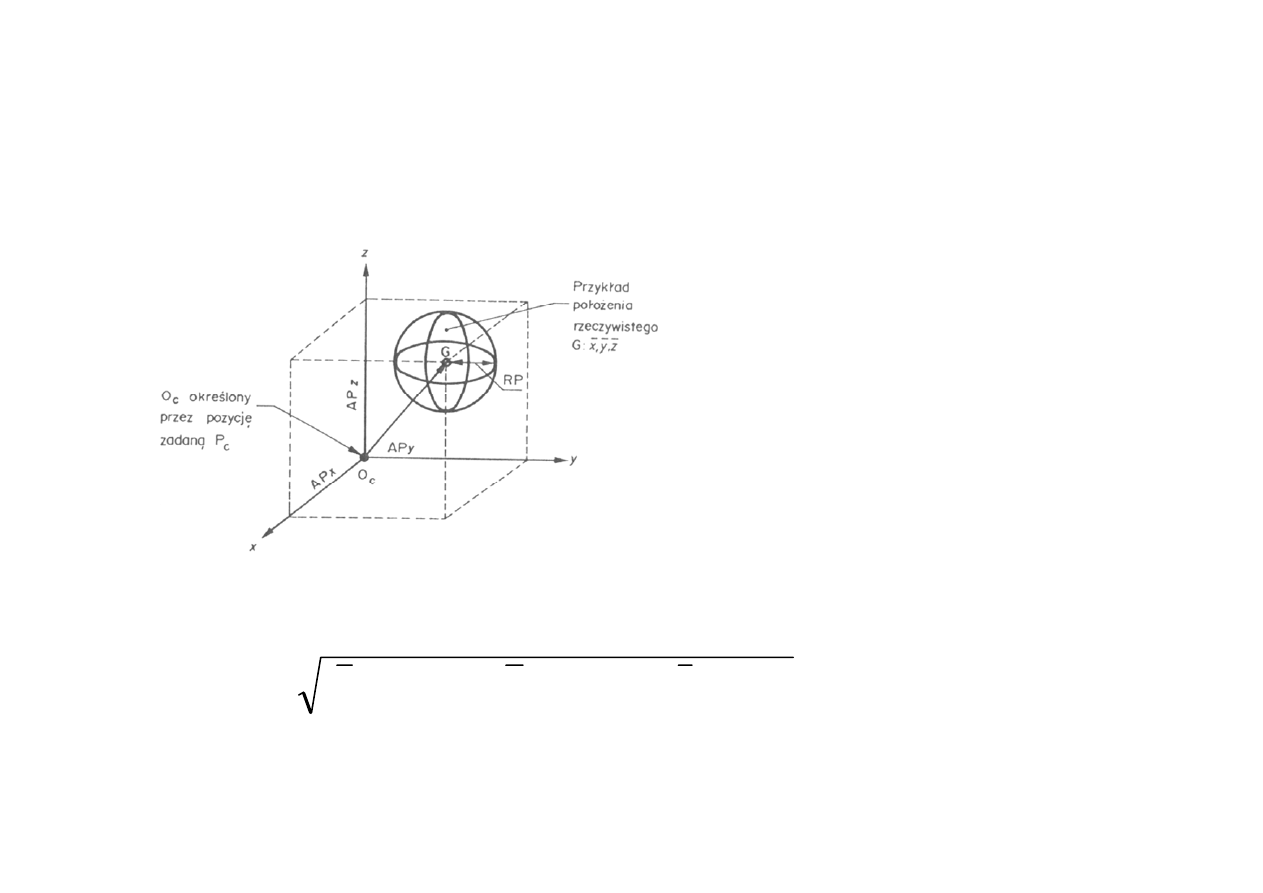
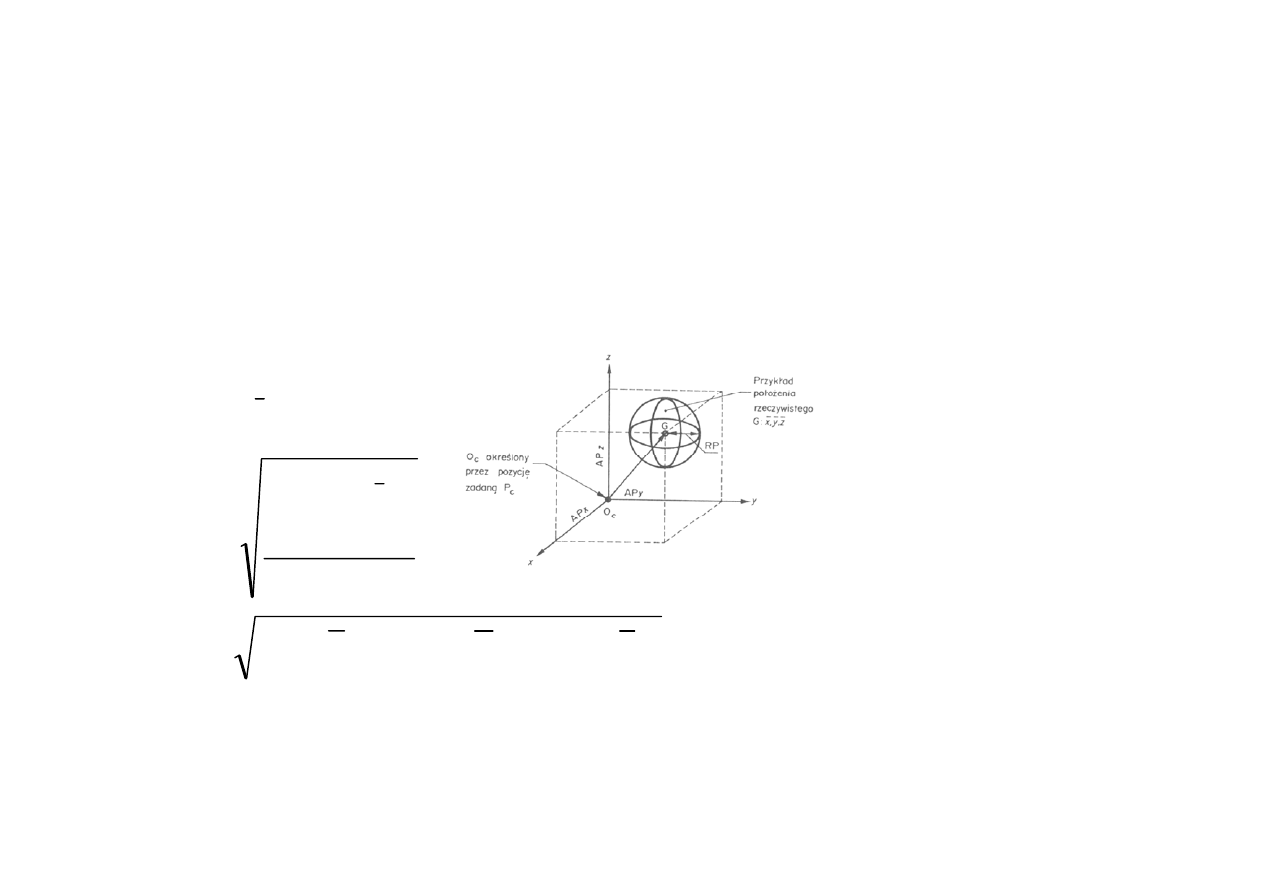
Dokładność i powtarzalność pozycjonowania jednokierunkowego
AP wg PN-EN 29283
„
Dokładność pozycjonowania
jednokierunkowego
podaje
odchyłkę między położeniem
zadanym a wartością średnią
położeń rzeczywistych przy
dochodzeniu do położenia
zadanego z tego samego
kierunku”
AP
x x
y y
z z
c
c
c
=
−
+
−
+
−
(
)
(
)
(
)
2
2
2
Ruch liniowy
Roboty przemysłowe
KRIM, AGH w Krakowie
25
AP
a a
AP
b b
AP
c c
a
c
b
c
c
c
= −
= −
= −
Orientowanie
Dokładność pozycjonowania jest istotna tylko w przypadku
zastosowania robota w operacjach: montażu, obróbki i inspekcji w
systemach CNC, gdzie nie ma możliwości zadawania pracy przez
uczenie.
Roboty przemysłowe
KRIM, AGH w Krakowie
26
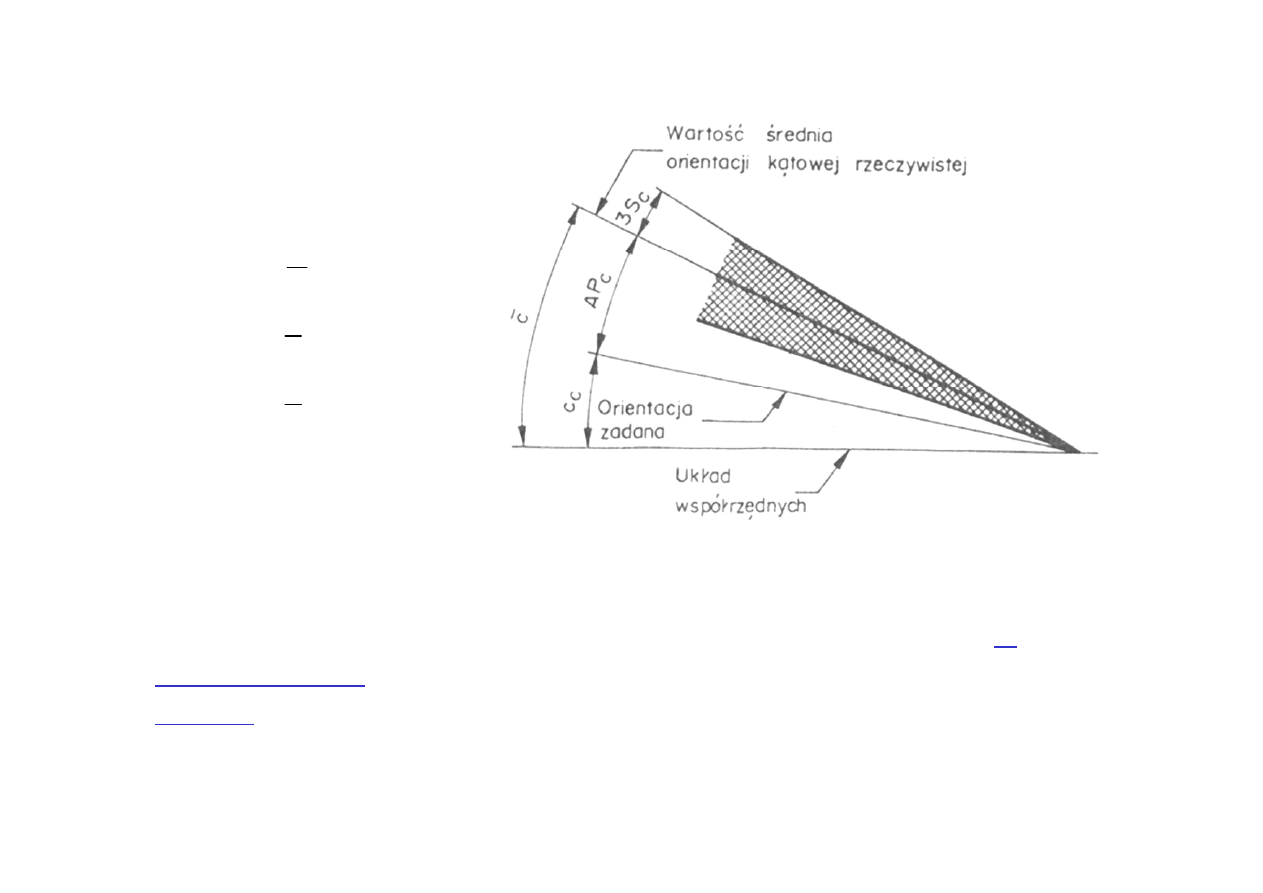
„
Powtarzalność pozycjonowania jednokierunkowego RP
jest
miarą rozrzutu położeń lub orientacji rzeczywistych uzyskanych w
wyniku n-krotnie powtarzalnego ruchu o tym samym kierunku do
położenia zadanego wg orientacji kątowej”
(
) (
) (
)
2
2
2
1
2
1
)
(
3
z
z
y
y
x
x
l
n
l
l
S
S
l
RP
j
j
j
j
n
j
j
l
l
−
+
−
+
−
=
−
−
=
+
=
∑
=
położenie
orientacja
RP
S
RP
S
RP
S
a
a
b
b
c
c
= ±
= ±
= ±
3
3
3
Roboty przemysłowe
KRIM, AGH w Krakowie
27
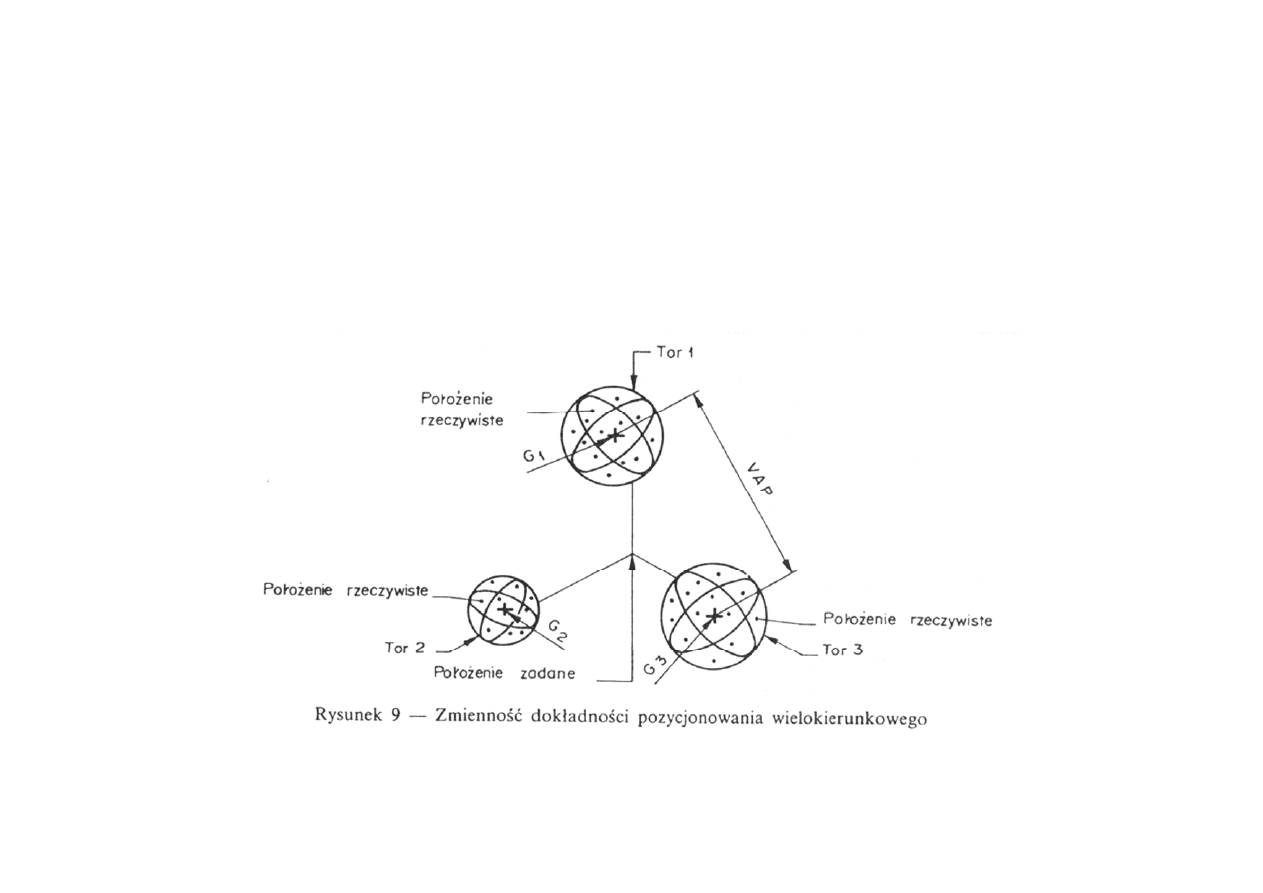
Zmienność dokładności pozycjonowania wielokierunkowego vAP
„ ... wyraża maksymalną odległość między różnymi średnimi
położeniami rzeczywistymi osiąganymi podczas dochodzenia do tego
samego położenia zadanego n-krotnie z 3 wzajemnie prostopadłych
kierunków”
Roboty przemysłowe
KRIM, AGH w Krakowie
28
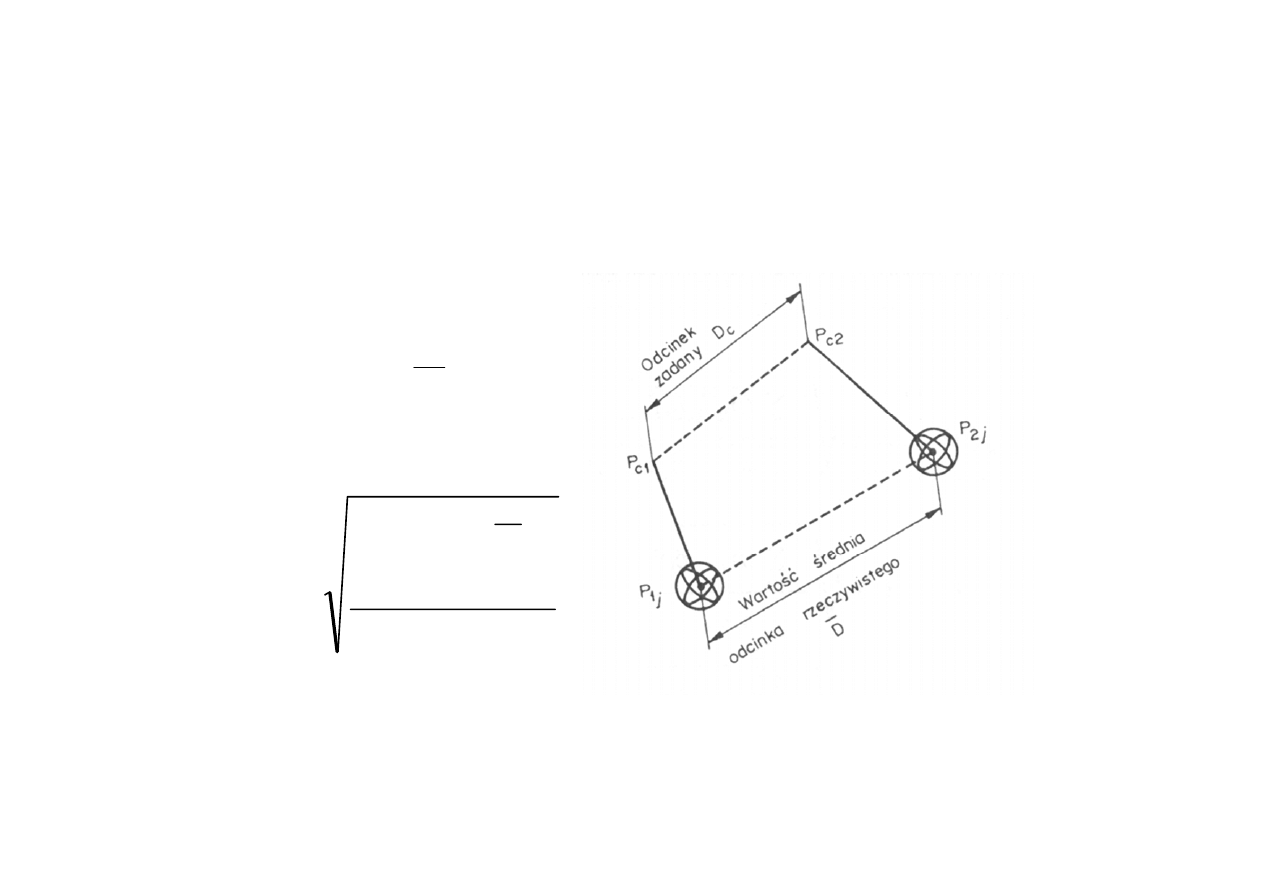
Dokładność AD i Powtarzalność RD odwzorowania odcinka
AD
D
D
c
=
−
„... określa odchyłkę pozycjonowania liniowego lub orientacji
kątowej między zadanym położeniem odcinka i średnią wartością
jego położeń rzeczywistych.”
RD
D
D
n
j
j
n
= ±
−
−
=
∑
3
1
2
1
(
)

Roboty przemysłowe
KRIM, AGH w Krakowie
29
Pełzanie charakterystyk pozycjonowania: dAP, dRP
dAP - dokładności pozycjonowania jednokierunkowego AP
AP
a
, AP
b
, AP
c
dRP – powtarzalności pozycjonowania jednokierunkowego RP
RP
a
, RP
b
, RP
c
„ ... jest miarą rozrzutu tej dokładności w określonym czasie.”
Roboty przemysłowe
KRIM, AGH w Krakowie
30
Charakterystyki odwzorowania toru
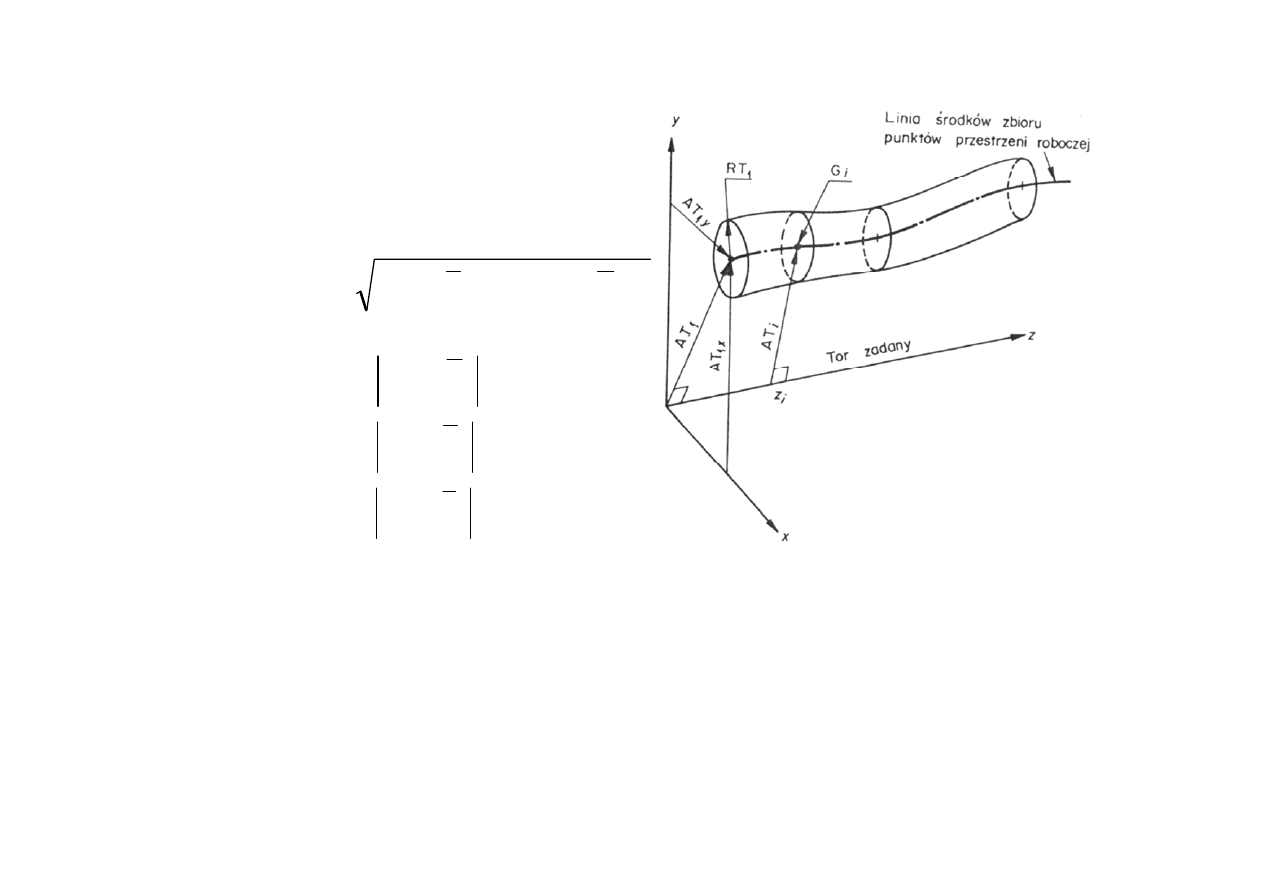
Tor liniowy
Dokładność odwzorowania toru AT
„ ... zdolność robota do dokładnego przemieszczania jego
interfejsu mechanicznego wzdłuż zadanego toru n-razy w tym
samym kierunku i n-razy w kierunku przeciwnym.”
(
) (
)
2
2
1
max
i
ci
i
ci
n
i
y
y
x
x
AT
−
+
−
=
=
i
ci
n
i
c
i
ci
n
i
b
i
ci
n
i
a
c
c
AT
b
b
AT
a
a
AT
−
=
−
=
−
=
=
=
=
1
1
1
max
max
max
Roboty przemysłowe
KRIM, AGH w Krakowie
31
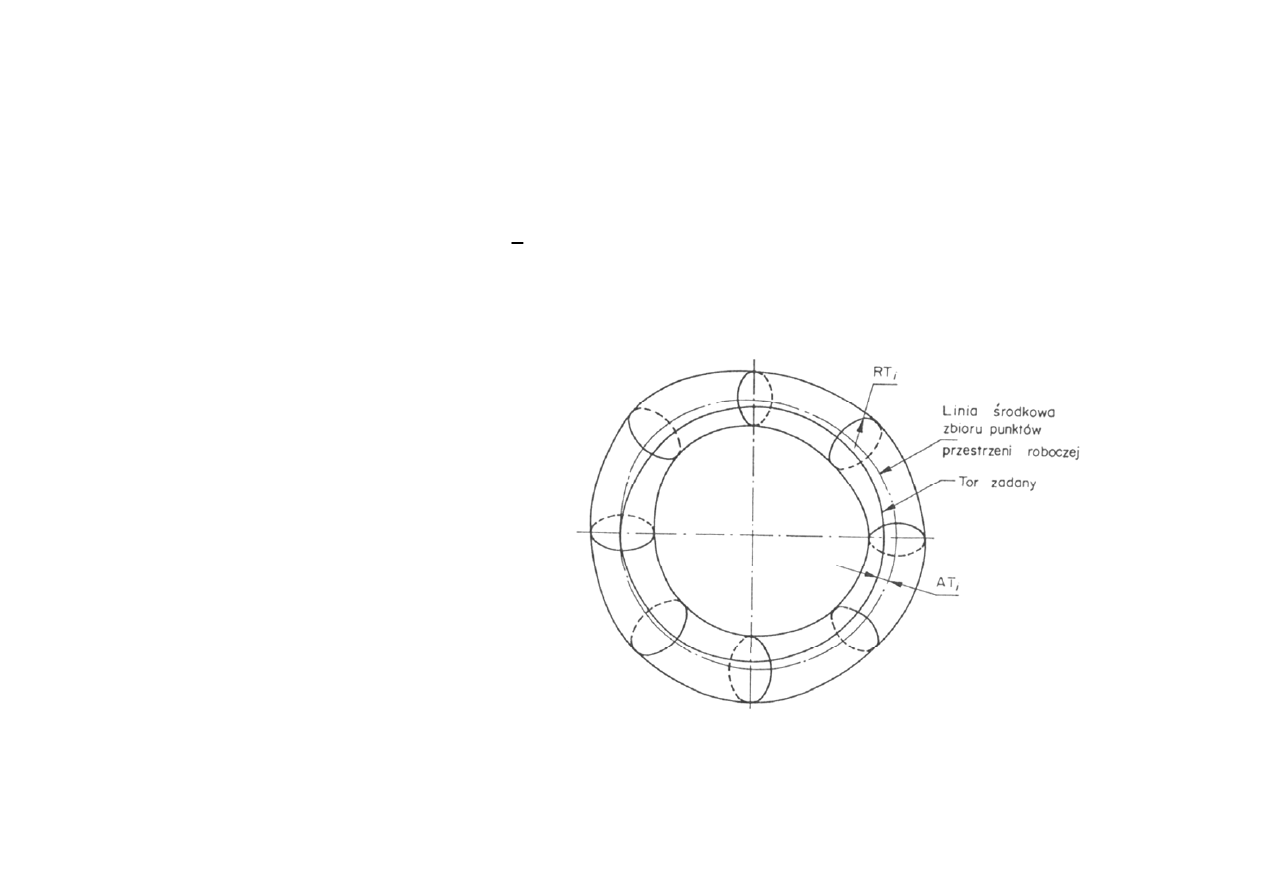
Tor kołowy
Powtarzalność odwzorowania toru RT
RT
i
m l
S
i
li
=
=
+
max(
... )[
]
1
3
]
3
)[
..
1
max(
]
3
)[
..
1
max(
]
3
)[
..
1
max(
ci
c
bi
b
ai
a
S
m
i
RT
S
m
i
RT
S
m
i
RT
=
=
=
=
=
=
„ ... jest miarą rozrzutu torów rzeczywistych, przy n-krotnym
odwzorowaniu zadanego toru.”
Roboty przemysłowe
KRIM, AGH w Krakowie
32
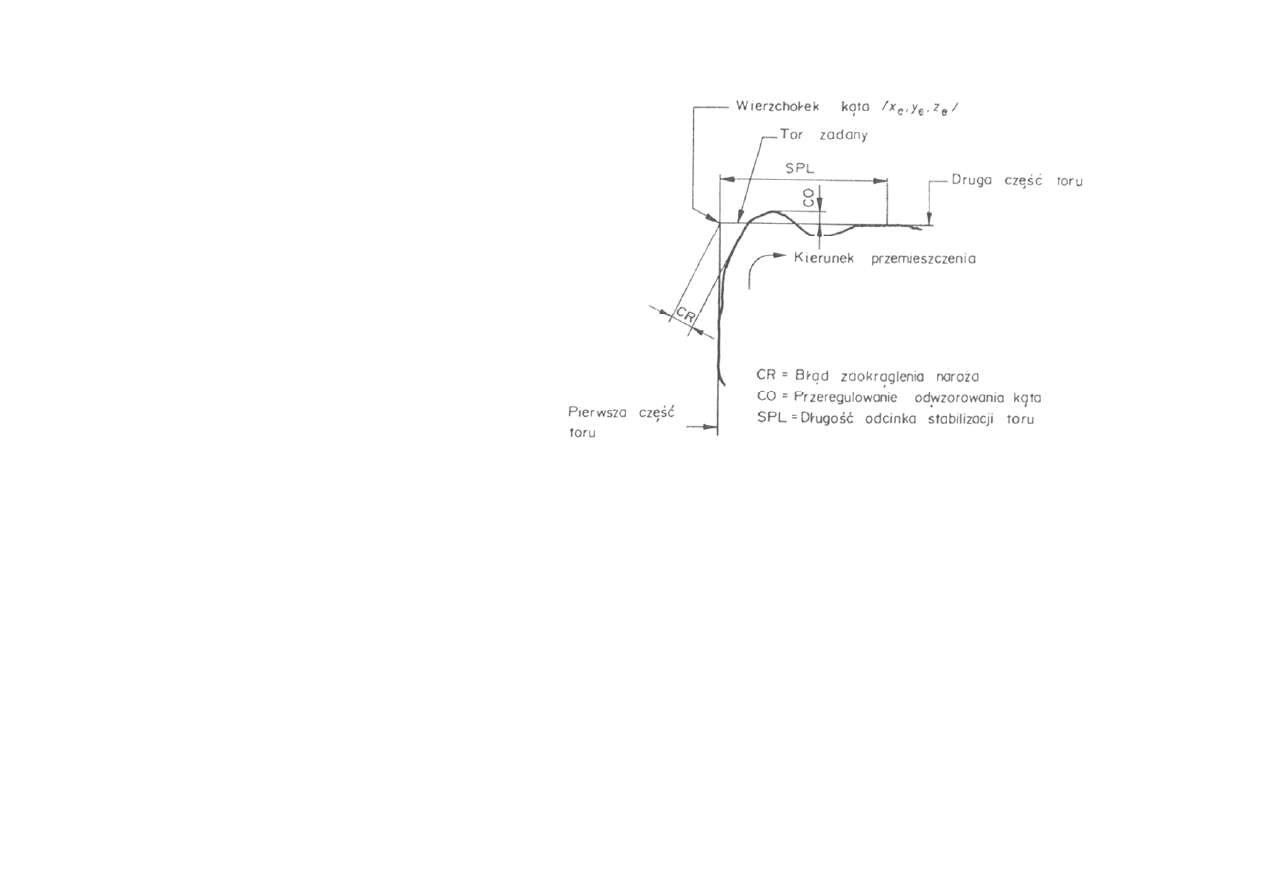
Odchyłki odwzorowania kąta
CR – błąd zaokrąglenia naroża
–
„ ... minimalna odległość
między wierzchołkiem kąta a
torem rzeczywistym.”
Tor – 2 linie prostopadłe
CO - Przeregulowanie
odwzorowania kąta –
„ ...
największa odchyłka
położenia toru rzeczywistego
od toru zadanego, ... na
drugim odcinku toru.”
SPL – Długość odcinka stabilizacji toru –
„ ... odległość od
wierzchołka kąta do punktu leżącego na drugiej części toru
zadanego, od którego charakterystyki dokładności i powtarzalności
odwzorowania toru mieszczą się w określonych granicach.”
CO>0

Roboty przemysłowe
KRIM, AGH w Krakowie
33
Określenie AT i RT dla toru prostoliniowego lub kołowego pozwala
na dekompozycję oceny odwzorowania toru ruchu na błąd położenia i
błąd prędkości. W przypadku rzeczywistej trajektorii błędy te są
zależne.
Dokładność pozycjonowania (2
÷15 mm) i dokładność odtwarzania toru
(do 200 mm) ruchu standardowych robotów jest bardzo zła, szczególnie
dla dużych prędkości i przyspieszeń ruchu.
Techniki polepszania charakterystyk dokładnościowych dla zadanych
wymagań kinematycznych i dynamicznych:
kalibracja bezwzględna manipulatora
zastosowanie manipulatorów elastycznych strukturalnie wraz
z odpowiednim układem sterowania
sterowanie z siłowym sprzężeniem zwrotnym w operacji montażu
i inspekcji
Roboty przemysłowe
KRIM, AGH w Krakowie
34
PARAMETRY KINEMATYCZNE MANIPULATORA -
SZYBKOBIEŻNOŚĆ
PRĘDKOŚĆ RUCHU
PRZYSPIESZENIE RUCHU
CZAS POZYCJONOWANIA
CZAS TRWANIA CYKLU
Roboty przemysłowe
KRIM, AGH w Krakowie
35
Producenci zazwyczaj podają maksymalne prędkości pojedynczych
ruchów.
Prędkość i przyspieszenie ruchu
Zwiększenie przyspieszenia ruchu powoduje powstawanie
drganiowych procesów przejściowych, które mogą wydłużyć czas
pozycjonowania.
Ograniczenie przyspieszenia ruchu powoduje zmniejszenie
efektywnej prędkości ruchu w ograniczonym zakresie ruchu.
R1 240°/s
R2 280°/s
R3 360°/s
R4 410°/s
R5 500°/s
R6 800°/s
liniowy 1.5 m/s
Roboty przemysłowe
KRIM, AGH w Krakowie
36
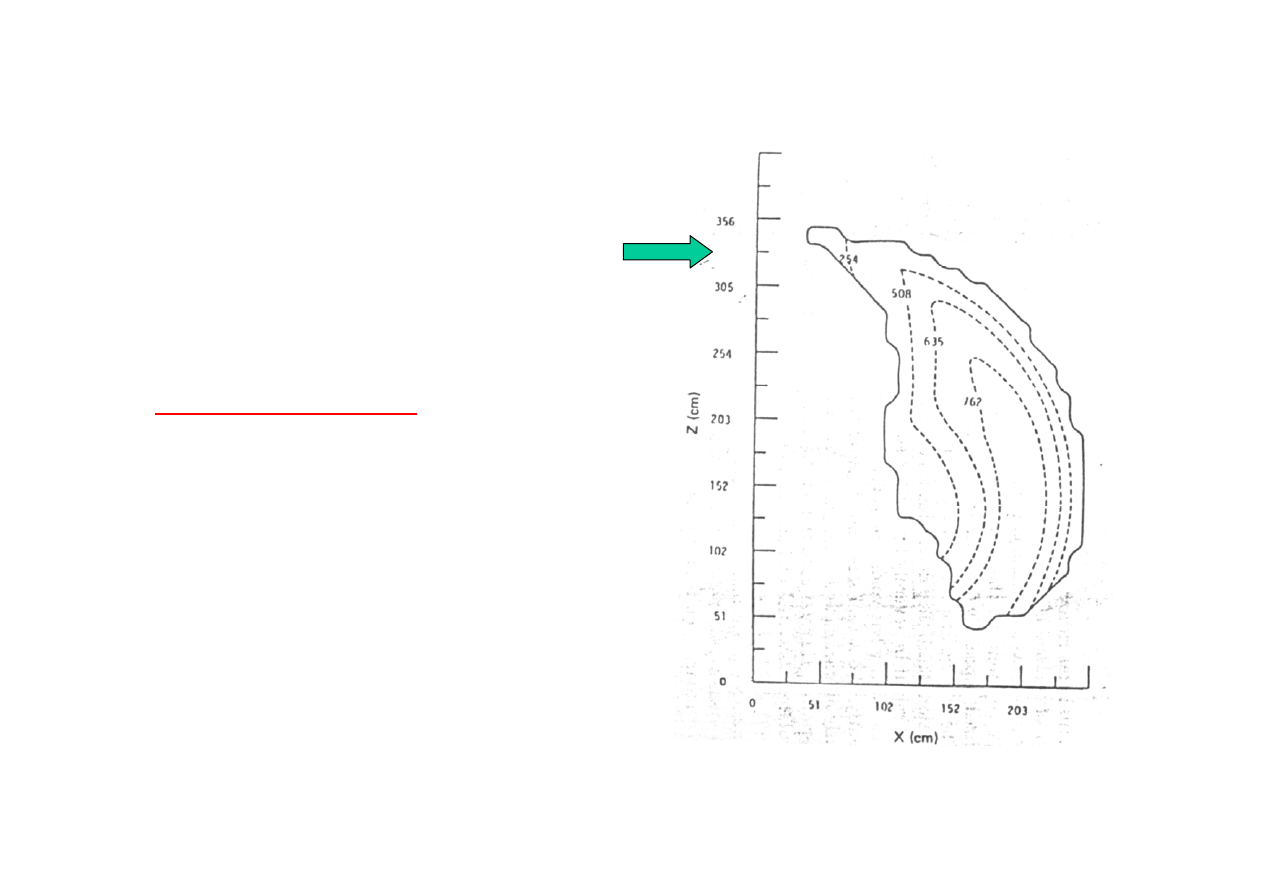
Prędkość i przyspieszenie efektora w przestrzeni roboczej
Przykład charakterystyki
maksymalnej prędkości efektora w
przekroju pionowym przestrzeni
roboczej [cm/s]
(Rivin)
Prędkość efektywna dla standardowej
drogi: stosunek długości drogi do sumy
czasu ruchu i czasu zanikania drgań.
Tym większa im większe prędkości w
złączach i im dłuższa droga w czasie
pomiaru
Tym mniejsza im większy udźwig
nominalny i zadana powtarzalność
pozycjonowania
Roboty przemysłowe
KRIM, AGH w Krakowie
37
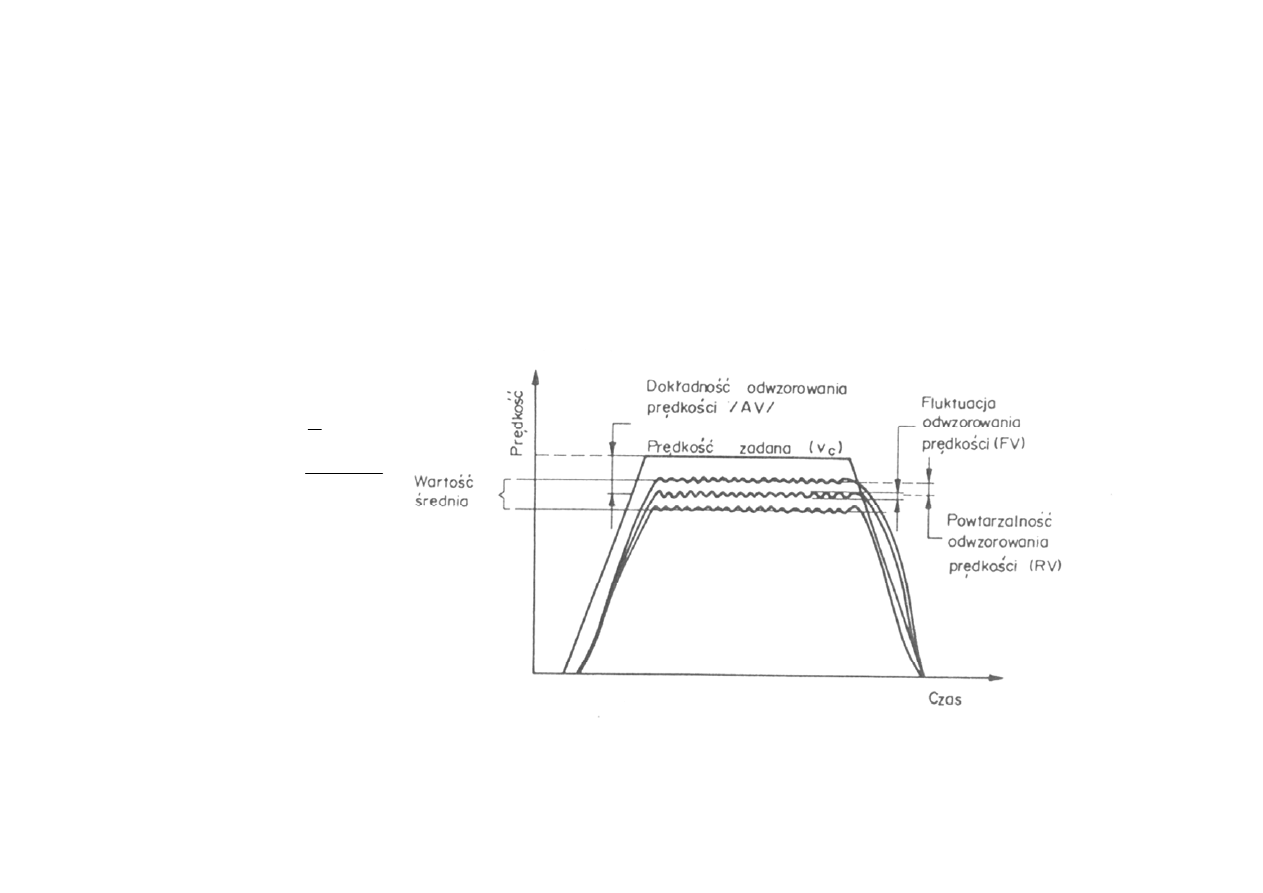
Dokładność prędkości odwzorowania toru AV
PN-EN 29283
„ ... błąd między wartością zadaną a wartością średnią rzeczywistych
prędkości osiągniętych podczas n-krotnie powtarzanych przemieszczeń
wzdłuż toru ... wyrażona w procentach wartości zadanej.”
c
c
v
v
v
AV
−
= 100
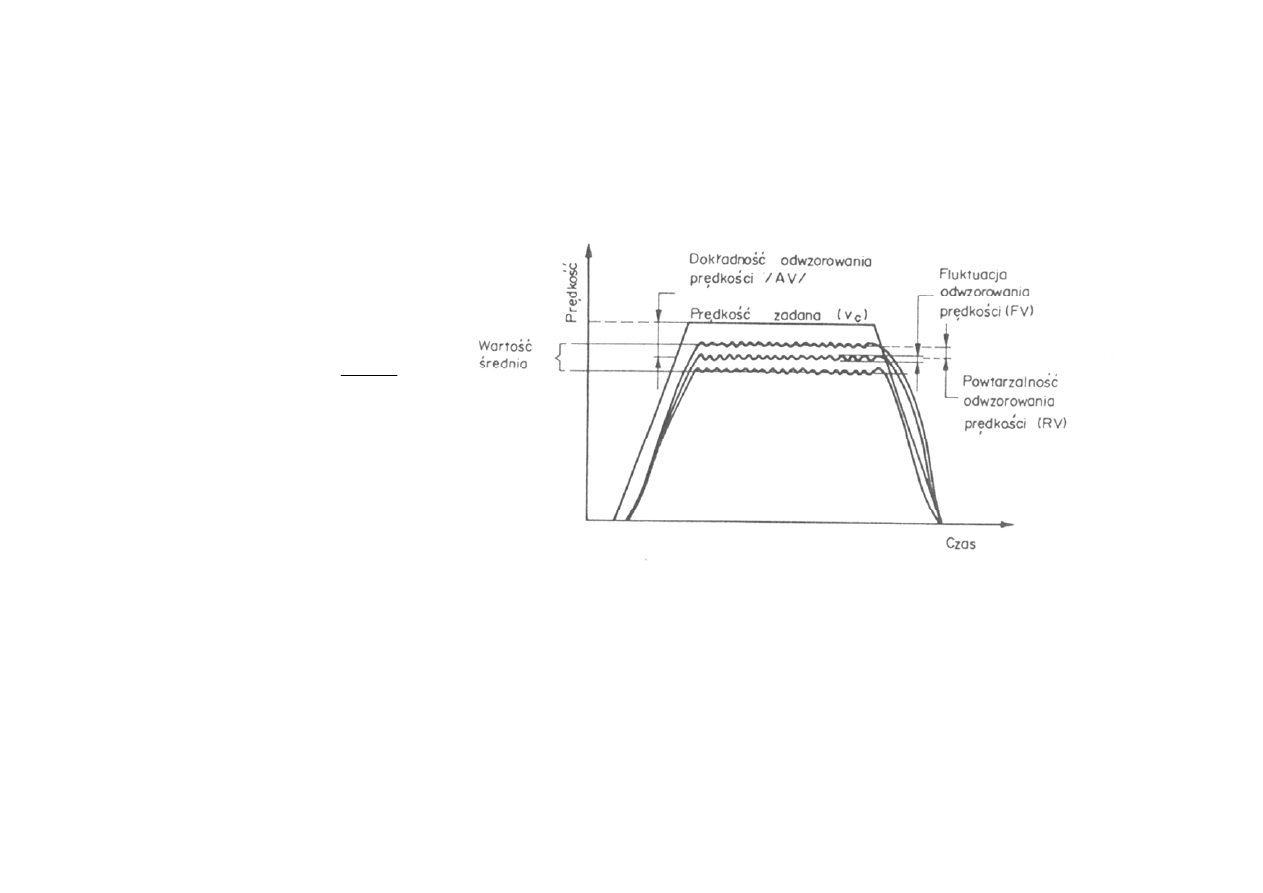
Roboty przemysłowe
KRIM, AGH w Krakowie
38
„ ... największa odchyłka prędkości uzyskanych podczas jednokrotnego
odwzorowania określonej prędkości zadanej.”
Fluktuacja prędkości odwzorowania toru FV
„ ... jest miarą rozrzutu prędkości rzeczywistych dla tej samej
prędkości zadanej.”
Powtarzalność prędkości odwzorowania toru RV
c
v
v
S
RV
3
100
±
=
PN-EN 29283
Roboty przemysłowe
KRIM, AGH w Krakowie
39
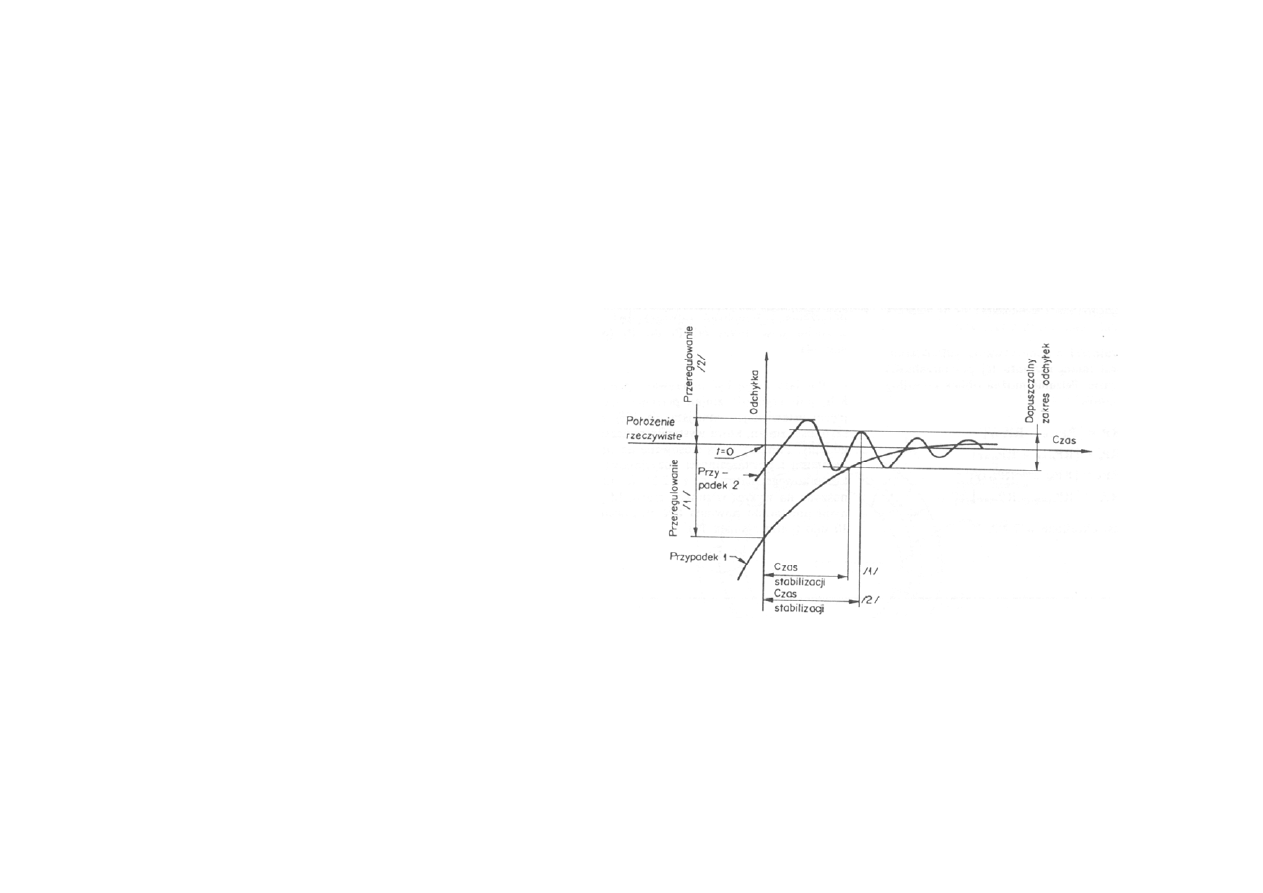
Czas stabilizacji położenia
Przeregulowanie pozycjonowania
„ ... jest przedziałem czasu, jaki upływa między chwilą, w której robot
przekazuje sygnał o rzeczywiście osiągniętym położeniu a chwilą, gdy
oscylacyjnie lub aperiodycznie tłumione ruchy jego interfejsu
mechanicznego mieszczą się w zakresie odchyłek określonym przez
producenta.”
„ ... Jest to maksymalna odchyłka
między torem dochodzenia i
położeniem rzeczywistym, badana po
przekazaniu przez robot sygnału
rzeczywiście osiągniętego położenia.”
Czas trwania cyklu pracy
Suma czasu pozycjonowania i innych operacji
PN-EN 29283
Roboty przemysłowe
KRIM, AGH w Krakowie
40
PARAMETRY DYNAMICZNE MANIPULATORA - SIŁY
UDŹWIG NOMINALNY
SIŁA UCHWYCENIA PRZEDMIOTU
SIŁY ODDZIAŁYWANIA EFEKTORA NA PR.
SIŁY NAPĘDOWE
SIŁY OPORÓW RUCHU (SPRAWNOŚĆ)
MOC MECHANICZNA
Roboty przemysłowe
KRIM, AGH w Krakowie
41
UDŹWIG NOMINALNY
Jest to:
maksymalna MASA JAKĄ MANIPULATOR może przenosić
w danym punkcie PR, obejmująca masę efektora.
MASOWY MOMENT BEZWŁADNOŚCI względem kołnierza kiści
MOMENT SIŁY CIĘŻKOŚCI EFEKTORA względem kołnierza kiści
MINIMALNĄ WARTOŚĆ masy dla całej PR.
funkcja PRĘDKOŚCI i/lub PRZYSPIESZENIA (linie stałego
udźwigu nominalnego dla stałej prędkości/przyspieszenia w
przekroju PR).
(ABB)
IRb 140
Roboty przemysłowe
KRIM, AGH w Krakowie
42
PARAMETRY DYNAMICZNE - DYNAMICZNE PARAMETRY
STRUKTURY
MASA/BEZWŁADNOŚĆ
SZTYWNOŚĆ
TŁUMIENIE
DRGANIA WŁASNE:
częstotliwości i postacie drgań własnych
.
Adept One 28.66 Hz
Roboty przemysłowe
KRIM, AGH w Krakowie
43
SZTYWNOŚĆ
Im niższa sztywność tym:
niższe wartości częstotliwości drgań własnych manipulatora
większe prawdopodobieństwo powstania drgań w czasie pracy
robota dla zadanego widma wymuszenia
dłuższy czas trwania procesów przejściowych wpływający na czas
pozycjonowania
możliwość powstawania przeregulowań
dla zadania pozycjonowania - obniżenie dokładności pozycjonowania
dla zadania śledzenia toru ruchu - duże błędy śledzenia oraz
niebezpieczeństwo powstania niestabilności ruchu
dla operacji wymagających dużej sztywności (
wiercenie, szlifowanie,
stępianie
) mała sztywność może uniemożliwić proces obróbki (
brak
skrawania, zły przebieg skrawania na skutek powstawania drgań
samowzbudnych
)
dla operacji montażu często biernie lub czynnie obniża się sztywność
by ułatwić montaż
Roboty przemysłowe
KRIM, AGH w Krakowie
44
TŁUMIENIE
Im większe tłumienie tym:
krótszy czas procesów przejściowych
mniejsze przesterowania
większa stabilność dynamiczna
MASA/BEZWŁADNOŚĆ
Przestrzenny rozkład masy manipulatora określa jego bezwładność
Im większa miara bezwładności tym wolniejsza odpowiedź
dynamiczna robota przy tym samym napędzie.
Duża masa zwiększa ciężar manipulatora, momenty sił ciężkości
oddziaływujące na strukturę i napęd manipulatora

Roboty przemysłowe
KRIM, AGH w Krakowie
45
Drgania własne analizowane są:
numerycznie przy pomocy Metody Elementów Skończonych
eksperymentalnie przy pomocy Eksperymentalnej Analizy Modalnej
.
Manipulatory powinny mieć jak największe wartości częstotliwości
drgań własnych ze względu na niekorzystny wpływ drgań wymuszonych
o dużej amplitudzie na pozycjonowanie efektora.
Zbyt niskie:
częstotliwości drgań własnych
częstotliwości próbkowania sygnałów pomiarowych
częstotliwości generacji sterowania w układach cyfrowych sterowania
mogą powodować niestabilność ruchu

Roboty przemysłowe
KRIM, AGH w Krakowie
46
UWAGA
wszystkim ruchom nieustalonym towarzyszą drgania
intensywność drgań zależy od: położenia efektora w PR., prędkości
i przyspieszenia ruchu
wartości częstotliwości drgań własnych manipulatora ulegają zmianie
w zależności od położenia efektora w PR.
Obserwuje się tendencje w dominowaniu drgań:
NISKOCZĘSTOTLIWOŚCIOWYCH STRUKTURY w czasie
zatrzymywania i ruszania
Układów Transmisji Ruchu NAPĘDÓW w czasie ruchu ustalonego.
Wyszukiwarka
Podobne podstrony:
3 4 Wymagania, kryteria oceny, parametry i charakterystyki manipulatorów
Kryteria wymagań na oceny(2)
kryteria oceny podręczników artykuł
Kryteria oceny zapisu KTG
Kryteria oceny w nauczaniu zintegrowanym klasa pierwsza(1)
Budowa i zasada działania układu pneumatycznego z?S oraz kryteria oceny
ENTROPIA SHANNONA JAKO PARAMETR CHARAKTERYZUJĄCY STAN BEZPIECZEŃSTWA
Oszacowanie parametrów charakterystyk podatnych połączeń stalowych za pomocą sieci neuro rozmytej
Kryteria oceny zajęć dydaktycznych, Materiały
Kryteria oceny rozprawki
Badanie parametrow charakteryzu Nieznany (2)
Kryteria oceny dla właściwego doboru systemowych deskowań stropowych
KOŚCIELSKA M Kliniczne kryteria oceny emocji, Pedagogika specjalna, Kościelska M
Kryteria oceny projektow w rama Nieznany
Podać podział i podstawowe parametry charakteryzujące łączniki nN
Dioda-wiad ogolne, Szkoła, Politechnika 1- 5 sem, SEM IV, Elektronika i Energoelektronika. Laborator
metr1 - część1, PARAMETRY CHARAKTERYZUJĄCE WŁAŚCIWOŚCI PRZYRZĄDÓW POMIAROWYCH: 1 Nazwa przyrządu okr
więcej podobnych podstron