Momentem siły P względem punktu 0 nazywamy iloczyn wektorowy tej siły przez promień - wektor łączący 0 z dowolnym punktem na linii działania tej siły.
Prawa tarcia Coulomba i Morena:
Siła tarcia nie zależy od wielkości stykających się powierzchni, a jedynie od ich rodzaju
Wielkość siły tarcia waha się od 0 do tzw. wartości granicznej Tg, która jest proporcjonalna do nacisku normalnego N cięzaru na podłogę.
W przypadku, gdy ciało ślizga się po pewnej powierzchni, siła tarcia jest skierowana zawsze przeciwnie do kierunku ruchu, wielkość jej zaś niie zależy w przybliżeniu od prędkości poślizgu
TARCIE KINETYCZNE
QGR=μG; TMAX=μT; 0≤Q≤ QGR; 0≤T≤TGR
![]()
tgϕgr= TGR/N=μN/N=μ ; ϕgr=arctgμ ; 0≤ϕ≤ϕGR
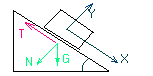
Tarcie na równi pochyłej
Suma PX=0 Gsinα-T=0
Suma PY=0 N-Gcosα=0
TMAX=μT; TMAX= Gsinαmax; tgαmax=μ
αmax=arctgμ warunek samohamowalności równi
Tarcie przy toczeniu
QR=NT f- współ. tarcia przy toczeniu
NfMax=MT moment tarcia przy toczeniu
0≤ MT≤QR=Nf
Mo=Σa=1nMa - moment główny układu sił
S=Σk=1nPk - wektor główny układu sił
M01=M0-r×s - wzór Bosma (moment siły S względem bieguna O gdzie r = OO1)
MO1•S= MOS=k=const Iloczyn momentu głównego względem dowolnego punktu ciała i wektora głównego układu jest równy iloczynowi mom. gł. układu względem bieguna redukcji O i jest stały = k.
S jest pierwszym niezmiennikiem układu sił.
k - parametr układu jest drugim niezmiennikiem układu sił.
Warunki równowagi płaskiego układu sił M.O=0 S=0
Moment statyczny względem osi lub płaszczyzny przechodzącej przez środek ciężkości jest zawsze równy 0.
Moment statyczny nie zmieni się, jeżeli zamiast części układu wprowadzimy punkt materialny o masie równej masie danej części leżący w środku ciężkości tej części masy.
Ruch płaski - ruch, w którym wszystkie punkty ciała poruszają się w płaszczyznach równoległych do pewnej płaszczyzny zwanej płaszczyzną kierującą.
xm= xm(t) ym= ym(t) ϕ=ϕ(t)
xa=xm+ξcosϕ-ηsinϕ
ya=ym+ξsinϕ+ηcosϕ
Prędkość dowolnego punktu w ruchu płaskim jest sumą geometryczną prędkości ruchu postępowego i prędkości ruchu obrotowego dookoła obranego bieguna.
1. Polega na tym, że znane są równania ruchu punktu, należy określić siły, które ten ruch wywołują.
{pogrubiona czcionka to wektor}
r=r(t)
r=x(t)i+y(t)j+z(t)k
x"(t)=ax
y"(t)=ay
z"(t)=az
Px(t)=mx"(t)
Py(t)=my"(t)
Pz(t)=mz"(t)
|P|=![]()
2. Polega na tym, że znane są siły działające na punkt materialny P, a szukane są wielkości x=x(t). y=y(t), z=z(t)
P=P(r,r',...,t)
Px=P(x,y,z,...,t)
Py=P(x,y,z,...,t)
Pz=P(x,y,z,...,t)
Zasada równoważności pracy i energii kinetycznej: Skończony przyrost energii kinetycznej układu mechanicznego ciał materialnych z położenia o konfiguracji elementów A do położenia o konfiguracji elementów B jest równy sumie prac całkowitych układów sił zewnętrznych i zewnętrznych na tym przemieszczeniu
mVB2/2 - mVA2/2 = LAB ; EkB - EkA = LAB
Przyrost Ek w czasie od t1 do t2 jest równy pracy wykonanej przez siłę działającą na punkt materialny w tym samym czasie.
Twierdzenie Steinera - moment bezwładności względem dowolnej osi jest równy momentowi osi równoległej i przechodzącej przez środek masy układu powiększonemu o iloczyn masy całkowitej i kwadratu odległości między tymi osiami. I = I0 + md2
Twierdzenie Königa - energia kinetyczna ciała sztywnego równa się sumie energii kinetycznej ruchu postępowego całej masy skupionej w środku masy oraz energii kinetycznej ruchu obrotowego ciała sztywnego dookoła osi przechodzącej przez środek masy.
Wyszukiwarka
Podobne podstrony:
Moment siły względem punktu, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
2 4 Moment wektora względem punktu
4 MOMENT SIŁY WZGLĘDEM PUNKTU MOMENT GŁÓWNY UKŁADU SIŁ
4 MOMENT SIŁY WZGLĘDEM PUNKTU MOMENT GŁÓWNY UKŁADU SIŁ 2
moment siły względem osi
Kąt ścięgnowo kostny i jego rola na rozwijany moment siły
iloczyn skalarny iloczyn wektorowy
Cwiczenia iloczyn wektorowy
Cwiczenia iloczyn wektorowy
Moment sił względem osi
Inne materiały, man-twierdzenie sin i cos oraz iloczyn wektorów, a/sinα=b/sinβ=c/sinγ=2R - tw
bloki stale-ruchome-moment sily, Fizyka
Biomechanika - zadania - Moment Siły, UJK.Fizjoterapia, - Notatki - Rok I -, Biomechanika, Zadania z
Iloczyn wektorowy
Iloczyn wektorowy i biegun
Więzy moment siły układ sił i ich podział, Statystyka
więcej podobnych podstron