1
Wykład - dynamika
Geometria mas. Dynamika układu
punktów materialnych
Masowy moment bezwładności
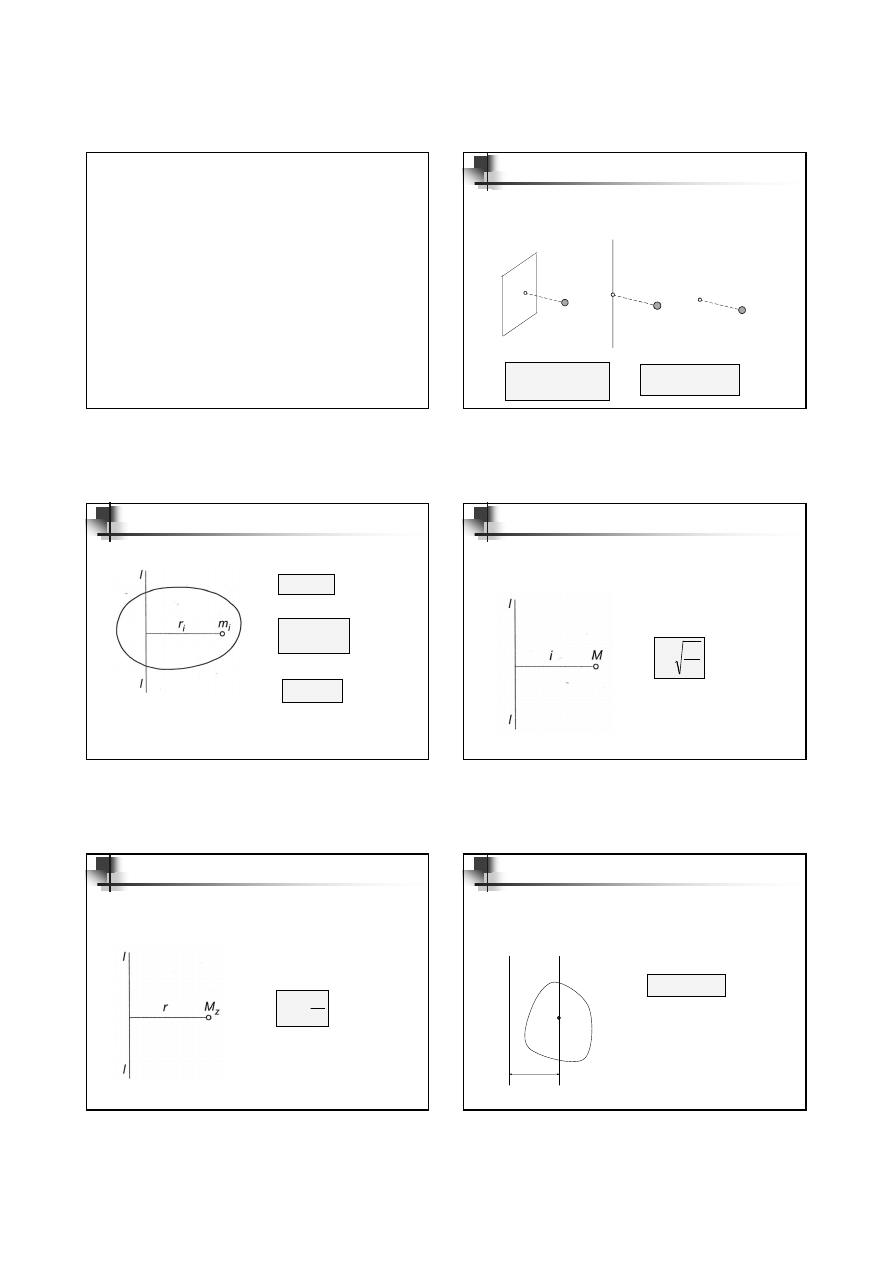
Masowym momentem bezwładności J punktu materialnego względem
bieguna, osi lub płaszczyzny nazywamy skalarną wielkość, równą
iloczynowi masy punktu i kwadratu odległości tego punktu od tego
bieguna, osi lub płaszczyzny.
[
]
2
m
kg
J
⋅
2
r
m
J
l
⋅
=
r
m
r
m
r
m
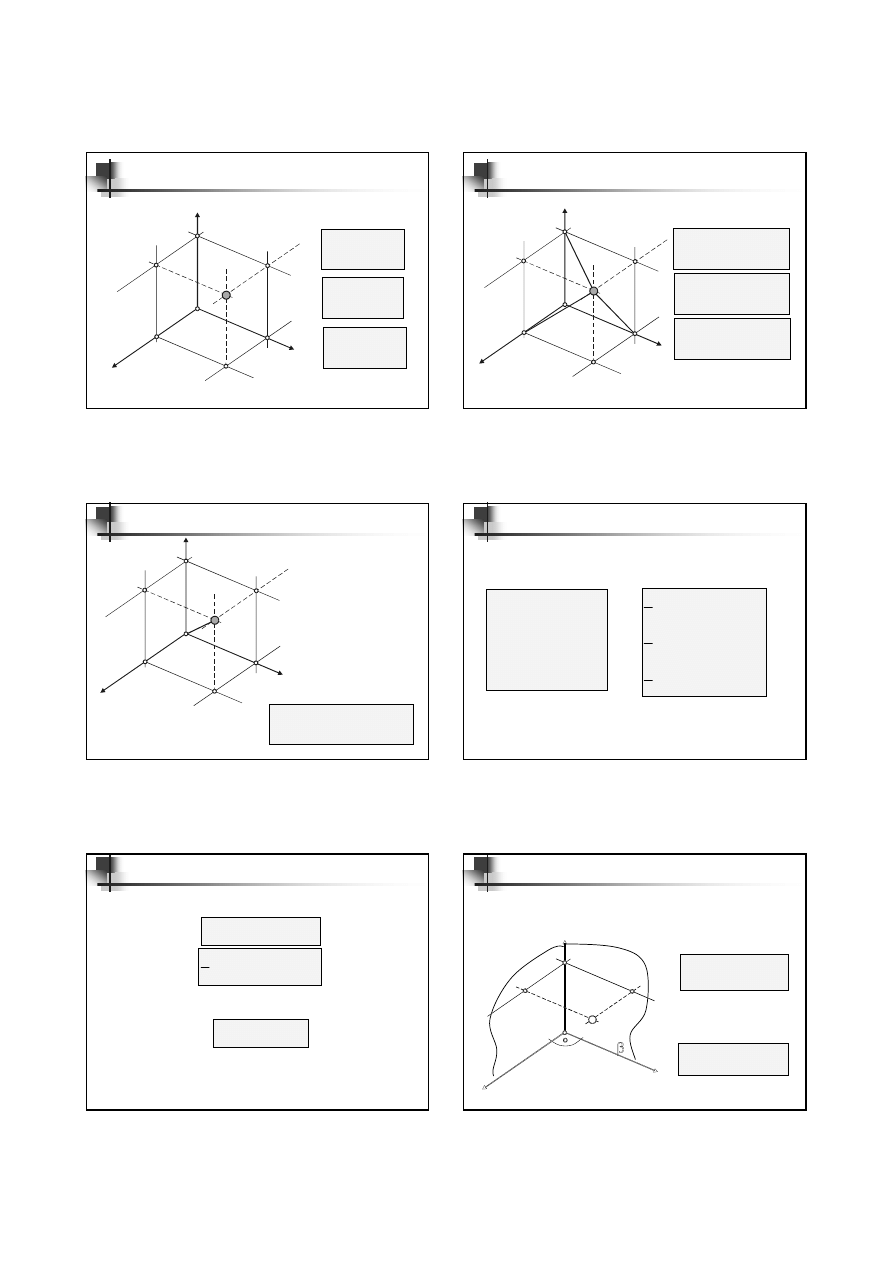
Masowy moment bezwładności
Dla punktu materialnego
∑
=
⋅
=
n
i
i
i
l
r
m
J
1
2
∫
=
dm
r
J
l
2
2
r
m
J
l
⋅
=
Dla układu punktów materialnych
Dla ciała materialnego
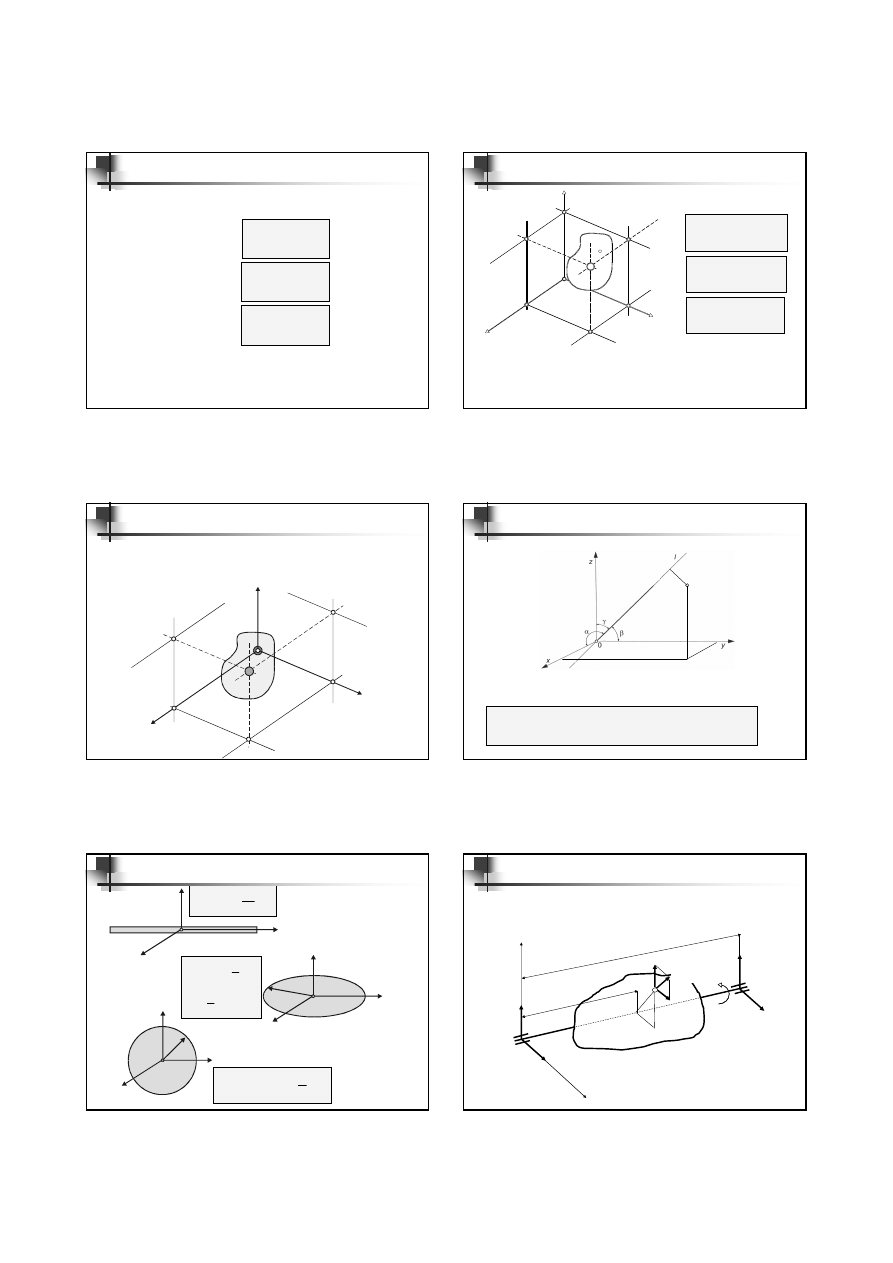
Promień bezwładności
Jeżeli ciało sztywne o masie M ma moment bezwładności J
l
względem
prostęj l-l, to możemy znaleźć taką odległość od osi, że punkt materialny o
masie M będzie miał ten sam moment bezwładności J
l
.
Odległość i będzie określona równaniem Mi
2
=J
l
, skąd:
M
J
i
l
=
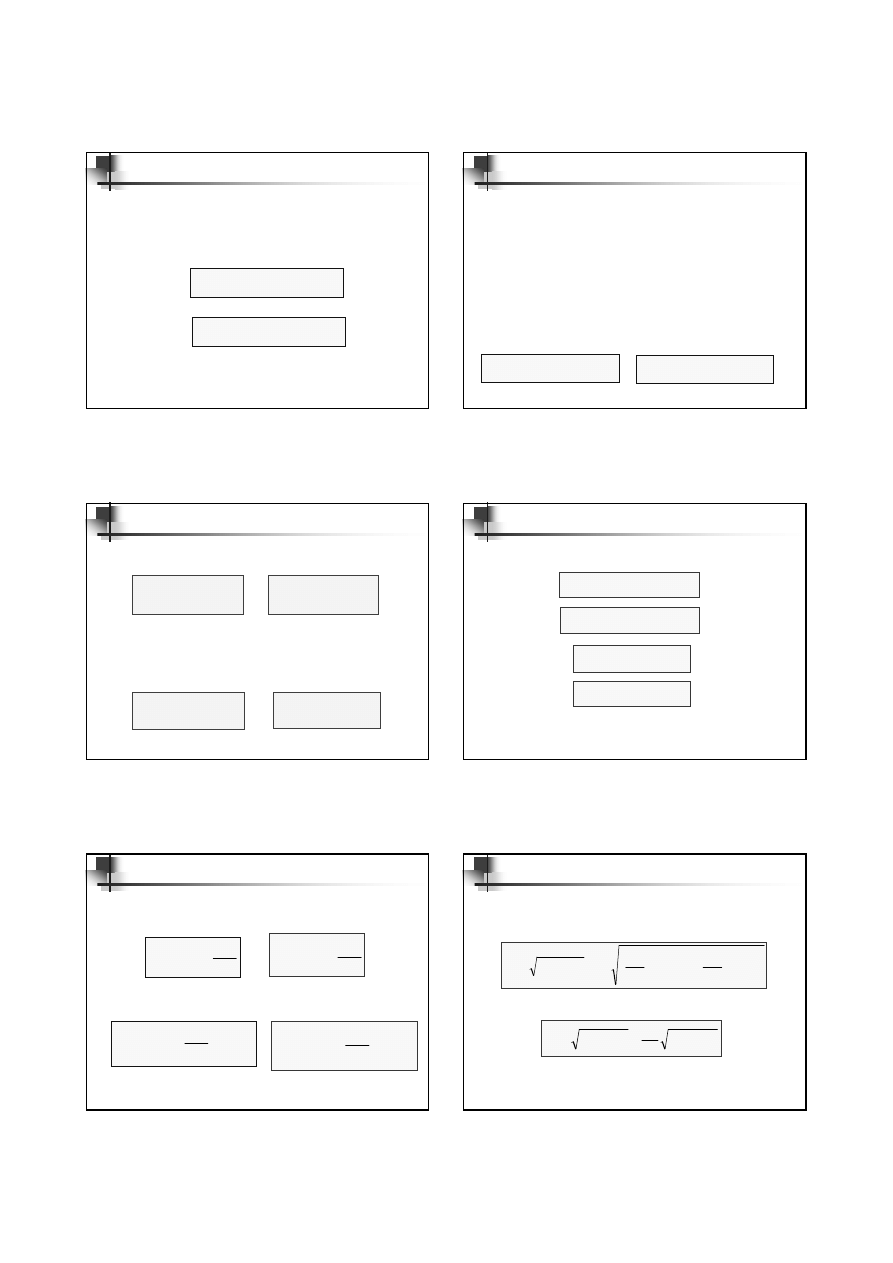
Masa zredukowana
Masą zredukowaną bryły na odległość nazywamy taką masę M, skupioną
w punkcie O odległym od prostej l-l, której moment bezwładności
względem prostej l-l jest równy momentowi bezwładności bryły względem
tej prostej.
2
r
J
M
l
z
=
Twierdzenie Steinera
Moment bezwładności ciała sztywnego względem pewnej osi
jest równy momentowi ciała względem prostej równoległej
przechodzącej przez środek masy powiększonemu o iloczyn
masy ciała i kwadratu odległości między osiami.
2
md
J
J
s
l
+
=
l
S
d
m
J
l
– moment bezwładności względem osi l,
J
s
– moment bezwładności względem osi
przechodzącej przez pkt. S,
m – masa ciala,
d – odleglość między osiami
2
Momenty bezwładności względem płaszczyzn
układu współrzędnych
∑
=
=
n
i
i
i
xy
z
m
J
1
2
∑
=
=
n
i
i
i
yz
x
m
J
1
2
∑
=
=
n
i
i
i
zx
y
m
J
1
2
x
x
z
z
m
y
y
i
i
i
i
Dla układu punktów materialnych
Momenty bezwładności względem osi układu
współrzędnych
∑
=
+
=
n
i
i
i
i
x
z
y
m
J
1
2
2
)
(
∑
=
+
=
n
i
i
i
i
y
z
x
m
J
1
2
2
)
(
∑
=
+
=
n
i
i
i
i
z
y
x
m
J
1
2
2
)
(
x
x
z
z
m
y
y
i
i
i
i
Dla układu punktów materialnych
Moment bezwładności względem bieguna
∑
=
+
+
=
n
i
i
i
i
i
O
z
y
x
m
J
1
2
2
2
)
(
x
O
x
z
z
m
y
y
i
i
i
i
Dla układu punktów materialnych
Zależności między momentami bezwładności
z
zx
yz
y
xy
yz
x
xy
zx
J
J
J
J
J
J
J
J
J
=
+
=
+
=
+
zx
y
x
z
yz
x
z
y
xy
z
y
x
J
J
J
J
J
J
J
J
J
J
J
J
=
−
+
=
−
+
=
−
+
)
(
2
1
)
(
2
1
)
(
2
1
Zależności między momentami bezwładności
O
zx
yz
xy
J
J
J
J
=
+
+
w płaskim układzie współrzędnych
O
z
y
x
J
J
J
J
=
+
+
)
(
2
1
O
y
x
J
J
J
=
+
Momentem dewiacji punktu materialnego względem dwóch
wzajemnie prostopadłych płaszczyzn
α
i
β
nazywamy iloczyn
masy punktu materialnego i jego odległości od danych płaszczyzn.
Moment dewiacji (odśrodkowy)
'
i
i
i
r
r
m
D
=
αβ
]
[
2
kgm
D
αβ
dm
r
r
D
∫
⋅
=
'
αβ
Dla bryły
i
r
i
r’
α
m
i
i
r
i
3
Momenty dewiacji w układzie kartezjańskim
∑
=
=
n
i
i
i
i
yz
z
y
m
D
1
∑
=
=
n
i
i
i
i
zx
x
z
m
D
1
∑
=
=
n
i
i
i
i
xy
y
x
m
D
1
Płaszczyzny zx oraz yz
Płaszczyzny zx oraz xy
Płaszczyzny yz oraz xy
Główne osie bezwładności
Trzy wzajemnie prostopadłe osie x, y, z poprowadzone z punktu O
wyznaczające trzy wzajemnie prostopadłe płaszczyzny xy, yz, zx względem
których momenty odśrodkowe układu punktów materialnych (bryły
sztywnej) są równe zeru, nazywamy głównymi osiami bezwładności.
0
1
=
=
∑
=
n
i
i
i
i
xy
y
x
m
D
0
1
=
=
∑
=
n
i
i
i
i
yz
z
y
m
D
0
1
=
=
∑
=
n
i
i
i
i
zx
x
z
m
D
x
x
z
z
m
y
y
S
O
S
ś
rodek masy
i
i
i
i
Główne centralne osie bezwładności
x
x
z
z
m
y
y
O=S
S
ś
rodek masy
i
i
i
i
Jeżeli punkt O jest środkiem masy rozpatrywanego układu
punktów materialnych (bryły sztywnej), to osie te nazywamy
głównymi centralnymi osiami bezwładności.
Transformacja obrotowa momentu bezwładności
moment bezwładności ciała względem prostej, której położenie w układzie
współrzędnych Oxyz określają kąty , , .
α
β
γ
α
γ
γ
β
β
α
γ
β
α
cos
cos
2
cos
cos
2
cos
cos
2
cos
cos
cos
2
2
2
zx
yz
xy
z
y
x
l
D
D
D
J
J
J
J
−
−
−
−
+
+
=
i
ρ
x
i
y
i
z
i
m
i
Masowe momenty bezwładności
y
y
y
x
x
l,m
m,r
m,r
x
z
z
z
r
r
pr
ę
t
tarcza
kula
2
12
1
ml
J
J
z
y
=
=
2
2
2
1
4
1
mr
J
mr
J
J
z
y
x
=
=
=
2
5
2
mr
J
J
J
z
y
x
=
=
=
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
Na rysunku zostało przedstawione ciało sztywne obracające się z prędkością kątową
ω
= const
dm
x
2
ω
dm
h
2
ω
dm
y
2
ω
z
x
y
Ay
R
Ax
R
By
R
Bx
R
l
x
y
dm
A
ω
B
4
∫
=
+
+
0
2
xdm
R
R
Bx
Ax
ω
∫
=
+
+
0
2
ydm
R
R
By
Ay
ω
Równania rzutów na osie x i y przybierają następującą postać
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
∫
=
−
−
0
2
xzdm
l
R
Bx
ω
∫
=
−
−
0
2
yzdm
l
R
By
ω
Biorąc pod uwagę to, że momenty względem osi Ax i Ay
elementarnej siły odśrodkowej wynoszą odpowiednio:
-ω²yzdm
oraz
ω
²xzdm
przyrównując kolejno do zera sumy momentów sił względem
wspomnianej osi, otrzymujemy:
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
∫
=
c
mx
xdm
∫
=
c
my
ydm
∫
=
yz
D
yzdm
∫
=
xz
D
xzdm
W równaniach momentów, występują całki, które równe są momentom
odśrodkowym:
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
Równaniom równowagi można nadać następującą postać
0
2
=
+
+
c
Bx
Ax
mx
R
R
ω
0
2
=
+
+
c
By
Ay
my
R
R
ω
0
2
=
−
−
yz
By
D
l
R
ω
0
2
=
−
−
xz
Bx
D
l
R
ω
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
Z powyższych równań znajdujemy
l
D
R
xz
Bx
2
ω
−
=
l
D
R
yz
By
2
ω
−
=
−
−
=
c
xz
Ax
mx
l
D
R
2
ω
−
−
=
c
yz
Ay
my
l
D
R
2
ω
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
2
2
2
2
2
−
+
−
=
+
=
c
yz
c
xz
Ay
Ax
A
my
l
D
mx
l
D
R
R
R
ω
2
2
2
2
2
yz
xz
By
Bx
A
D
D
l
R
R
R
+
=
+
=
ω
Wartości bezwzględne reakcji dynamicznych łożysk możemy zatem zapisać:
REAKCJE DYNAMICZNE ŁOśYSK OSI OBROTU
5
Środek masy
Środkiem masy układu nazywa się punkt
geometryczny S, którego promień-wektor
r
s
wyznacza się wg wzoru:
M
r
m
r
n
i
i
i
s
∑
=
=
1
x
y
z
1
r
2
r
n
r
S
S
r
Momenty statyczne
Momentem statycznym układu punktów materialnych
względem płaszczyzny nazywamy sumę iloczynów mas
punktów układu przez odległości od tej płaszczyzny
,
,
,
1
1
1
∑
∑
∑
=
=
=
=
=
=
n
i
i
i
xy
n
i
i
i
zx
n
i
i
i
yz
z
m
M
y
m
M
x
m
M
x
y
z
1
r
2
r
n
r
S
S
r
Zasada ruchu środka masy
Zasada ruchu środka masy:
Ś
rodek masy porusza się jak swobodny punkt materialny o masie
równej masie całego układu pod działaniem sumy geometrycznej
sił czynnych i reakcji.
Zasada zachowania ruchu środka masy
Jeżeli suma geometryczna sił czynnych i reakcji jest równa zeru, to środek
masy pozostaje w spoczynku lub porusza się ruchem jednostajnym
prostoliniowym (jeżeli miał początkową prędkość).
∑
∑
=
=
+
=
n
i
m
j
j
i
s
R
F
a
M
1
1
M – masa układu,
F
i
– siła czynna
R
j
- reakcja
Równania ruchu środka masy
Równanie poniższe określają ruch środka masy (dynamiczne równania ruchu
ś
rodka masy)
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
+
=
+
=
+
=
n
i
m
j
jz
iz
s
n
i
m
j
jy
iy
s
n
i
m
j
jx
ix
s
R
F
z
M
R
F
y
M
R
F
x
M
1
1
1
1
1
1
&
&
&
&
&
&
Pęd układu punktów materialnych
Pęd ogólny układu punktów materialnych równa się pędowi
całej masy układu skupionej w jego środku masy
∑
=
=
=
n
i
i
i
s
m
v
M
p
1
ν
Pochodna względem czasu wektora ogólnego układu
punktów materialnych jest równa wektorowi głównemu sił
zewnętrznych, działających na dany układ
∑
=
=
i
F
p
dt
p
d
&
Zasada równoważności pędu i impulsu
Przyrost
wektora
pędu
układu
punktów
materialnych w określonym przedziale czasu jest
równy sumie impulsów sił zewnętrznych działających
na układ
dt
F
p
p
t
t
∫
=
−
2
1
1
2
S
p
p
=
−
1
2
6
Kręt układu punktów materialnych
Kręt ogólny układu punktów materialnych względem
obranego bieguna nazwiemy sumę geometryczną
poszczególnych wektorów krętu
∑
∑
=
=
×
=
=
n
i
i
i
i
n
i
o
i
o
m
r
K
K
1
1
ν
Kręt układu punktów materialnych
Pochodna względem czasu wektora krętu ogólnego
układu punktów materialnych obliczonego
względem dowolnego bieguna jest równa
wektorowi momentu głównego sił zewnętrznych,
działających na dany układ, wyznaczonego
względem tego samego bieguna
o
o
o
M
K
dt
K
d
=
=
&
Zderzenie środkowe proste
Zderzenie środkowe proste
Zderzenie środkowe proste
Zderzenie środkowe ukośne
UDERZENIA PROSTE I ŚRODKOWE
1
O
1
v
2
O
2
v
1
O
u
2
O
u
1
O
'
1
v
2
O
'
2
v
Rozpatrzmy następujący przypadek zderzenia. Załóżmy, że kule poruszają się w
tym samym kierunku przy czym
v
1
> v
2
.
'
2
2
'
1
1
2
2
1
1
v
m
v
m
v
m
v
m
+
=
+
Dla układu mo
ż
na napisa
ć
równanie p
ę
du
Okres pierwszy rozpoczyna si
ę
z chwila zetkni
ę
cia si
ę
uderzaj
ą
cych kul i trwa dopóki pr
ę
dko
ś
ci kul nie wyrównaj
ą
si
ę
, czyli nie osi
ą
gn
ą
pewnej wspólnej pr
ę
dko
ś
ci oznaczonej
na rysunku przez u.
UDERZENIA PROSTE I ŚRODKOWE
Przebieg uderzenia mo
ż
emy podzieli
ć
na dwa okresy:
1
O
1
v
2
O
2
v
1
O
u
2
O
u
Z chwil
ą
wyrównania si
ę
pr
ę
dko
ś
ci rozpoczyna si
ę
drugi
okres uderzenia, podczas którego lokalne odkształcenia kul
stopniowo malej
ą
, a co za tym idzie, malej
ą
równie
ż
siły
wzajemnego oddziaływania obu kul.
UDERZENIA PROSTE I ŚRODKOWE
Przebieg uderzenia mo
ż
emy podzieli
ć
na dwa okresy:
1
O
u
2
O
u
1
O
'
1
v
2
O
'
2
v
7
Z powyższych równań można wyznaczyć wspólna prędkość obu
kul na końcu rozważanego okresu
(
)
2
2
1
1
2
1
1
v
m
v
m
m
m
u
+
+
=
UDERZENIA PROSTE I ŚRODKOWE
S’, S’’ to odpowiednio impulsy siły z któr
ą
w pierwszym i
drugim okresie uderzenia oddziałuje kule na siebie
∫
−
=
−
=
−
'
''
1
'
1
1
τ
τ
S
Fdt
u
m
v
m
∫
=
=
−
'
''
2
'
2
2
τ
τ
S
Fdt
u
m
v
m
Z hipotezy Poissona przyjmujemy
ż
e :
'
''
kS
S
=
UDERZENIA PROSTE I ŚRODKOWE
k oznacza pewien stały współczynnik wyznaczony na
podstawie doświadczeń i zwany współczynnikiem
restytucji.
UDERZENIA
1
2
'
1
'
2
v
v
v
v
k
−
−
−
=
Wg hipotezy Newtona
Wartości współczynnika restytucji dla ciał wykonanych
z tego samego materiału:
•Drewno
k=0,26
•Stal
k=0,56
•śeliwo
k=0,66
•Szkło
k=0,94
•Ołów
k=0,20
UDERZENIA
Wyszukiwarka
Podobne podstrony:
MD wykl 06 id 290158 Nieznany
LsciA gi z wykL,adAlw id 10118 Nieznany
MD wykl 08 id 290160 Nieznany
MD wykl 07 id 290159 Nieznany
MD wykl 03 id 290155 Nieznany
MD wykl 10 id 290163 Nieznany
MD wykl 06 id 290158 Nieznany
LsciA gi z wykL,adAlw id 10118 Nieznany
7 Wykl 7 str 4 tab 1 N 5 id 612 Nieznany (2)
PIF2 2007 Wykl 09 Dzienne id 35 Nieznany
automatyka wykl 1 id 73377 Nieznany
AnZmien wykl id 66671 Nieznany (2)
KartyKontr wykl id 232888 Nieznany
MB powtorka DYN sem V id 289772 Nieznany
owi wykl od sikory id 342878 Nieznany
7 Wykl 7 str 4 tab 1 N 5 id 612 Nieznany (2)
PIF2 2007 Wykl 09 Dzienne id 35 Nieznany
automatyka wykl 1 id 73377 Nieznany
więcej podobnych podstron