REGUALTORY PID, WSKAŹNIKI JAKOŚCI
Projektując układy sterowania, w szczególności liniowe, staramy się, aby zaprojektowany
układ sterowania był stabilny i posiadał pewne dodatkowe własności, np. miał odpowiedni
zapas stabilności, miał podane wartości parametrów jakości statycznej i dynamicznej itd.
W wielu wypadkach powyższe warunki można spełnić włączając w strukturę
sterowania dodatkowe układy pomocnicze, między innymi regulatory.
1.
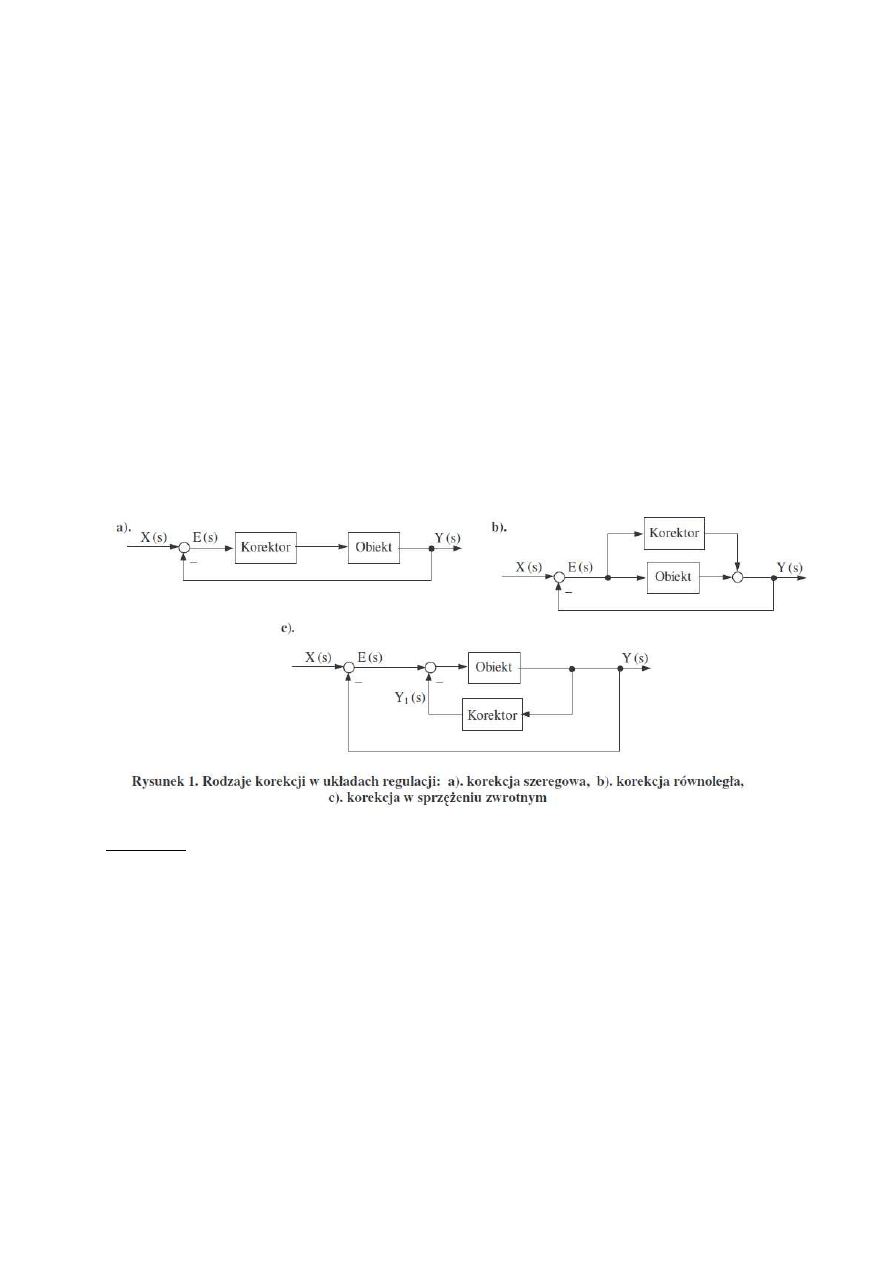
Podstawowe rodzaje korekcji
Chcąc uzyskać odpowiednie zmiany transmitancji układu regulacji można stosować
następujące rodzaje korekcji:
-
korekcja szeregowa – polega na wałczeniu w dogodnym miejscu do pętli układu
regulacji, szeregowo, wybranego członu korekcyjnego,
-
korekcja polegająca na utworzeniu dodatkowych pętli wokół jednego lub kilku
członów układu:
• korekcja równoległa,
• korekcja w sprzężeniu zwrotnym
Regulatory – szeregowe człony korekcyjne, w których możliwe jest wielokrotne nastawienie
jednego lub kilku parametrów. Głównym zadaniem regulatora, jak zresztą każdego
urządzenia sterującego, jest wytwarzanie w oparciu o sygnał uchybu sterowania e(t), sygnału
sterującego obiektem regulacji m(t), w sposób zapewniający jego zachowanie zgodnie z
przyjętymi wymaganiami.
Działanie regulatorów oparte jest o przetwarzanie sygnału uchybu z wykorzystaniem trzech
elementarnych operacji: wzmocnienia – operacja P, całkowania – operacja I oraz
różniczkowania – operacja D. Ogólna struktura tak działających regulatorów została
przedstawiona na Rysunku 2.
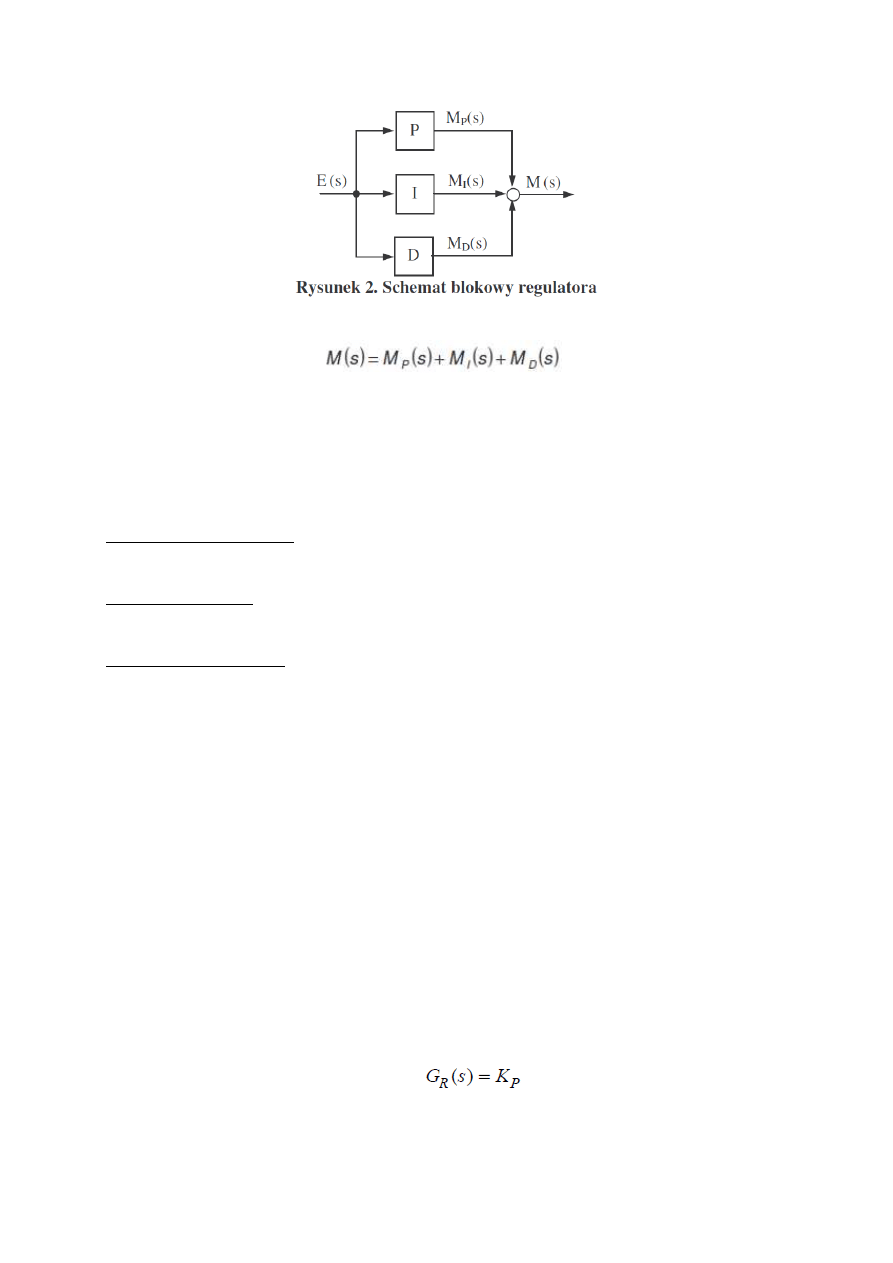
Sygnał wyjściowy z regulatora jest postaci:
gdzie:
M
p
(s)
– składowa proporcjonalna do uchybu regulacji wytwarzana przez blok P,
M
i
(s)
– składowa całkująca proporcjonalna do całki uchybu regulacji wytwarzana przez blok
I,
M
d
(s)
– składowa różniczkująca proporcjonalna do pochodnej uchybu regulacji wytwarzana
przez blok D.
Działanie proporcjonalne:
Działanie to zmniejsza uchyb regulacji w stanie ustalonym, nieznacznie wpływa na skrócenie
czasu regulacji (zwiększa prędkość odpowiedzi) i zwiększa przeregulowanie.
Działanie całkujące:
Działanie to sprowadza uchyb regulacji w stanie ustalonym do zera, wpływa na wydłużenie
czasu regulacji i zwiększa przeregulowanie
Działanie różniczkujące:
Działanie to nie wpływa na uchyb regulacji w stanie ustalonym, wpływa na skrócenie czasu
regulacji i zmniejsza przeregulowanie.
Ze względu na wykorzystanie poszczególnych składowych w sygnale generowanym przez
regulator, praktyczne zastosowanie znalazły następujące rodzaje regulatorów:
-
proporcjonalny P,
-
proporcjonalno - całkujący PI,
-
proporcjonalno - różniczkujący PD,
-
proporcjonalno – całkująco - różniczkujący PID.
Regulator całkujący I nie znalazł zastosowania, ponieważ jego obecność w układzie regulacji
pogarsza właściwości dynamiczne tego układu.
Regulator różniczkujący D nie jest stosowany, ponieważ jego obecność w układzie regulacji
ogranicza się tylko do przebiegów przejściowych.
Rodzaje regulatorów:
Najczęściej wykorzystywane w praktyce regulatory to :
-
Proporcjonalny P
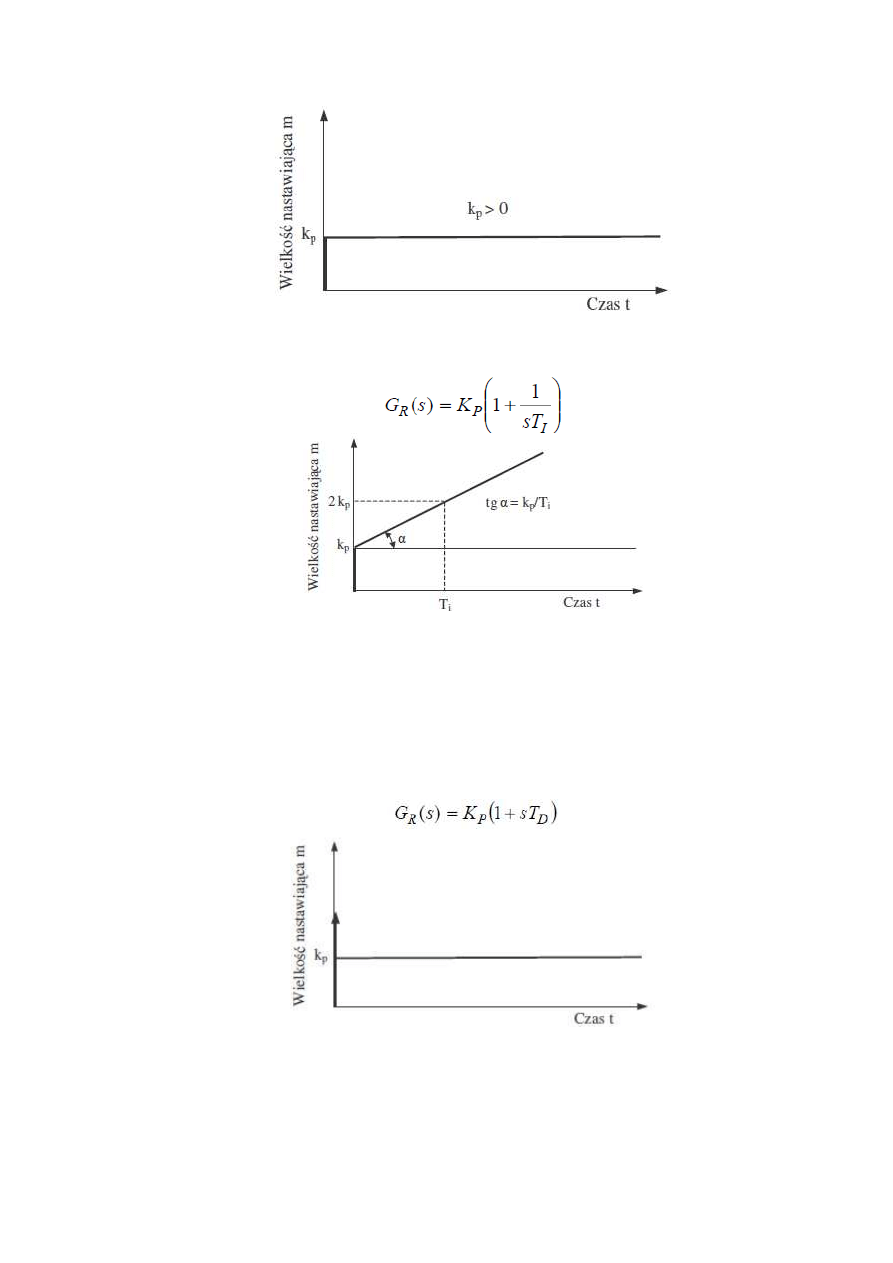
Rys.3 Charakterystyka skokowa regulatora P
-
Proporcjonalno - całkujący PI,
Rys.4 Charakterystyka skokowa regulatora PI
T
i
- czas zdwojenia - czas potrzebny na to, aby przy skokowym wymuszeniu podanym na
wejście regulatora PI, część sygnału wyjściowego tego regulatora, wywołana całkowaniem,
stała się równa drugiej części sygnału wyjściowego wywołanej działaniem proporcjonalnym,
dzięki czemu sumaryczny sygnał wyjściowy z regulatora staje się po czasie
T
i
dwukrotnie
większy niż w chwili początkowej.
-
Proporcjonalno - różniczkujący PD,
Rys.5 Charakterystyka skokowa regulatora PD
T
d
– czas wyprzedzania - czas potrzebny na to, aby przy liniowo narastającym wymuszeniu
podanym na wejście regulatora PD, sygnał związany z działaniem proporcjonalnym zrównał
się z sygnałem pochodzącym od działania różniczkującego.
-
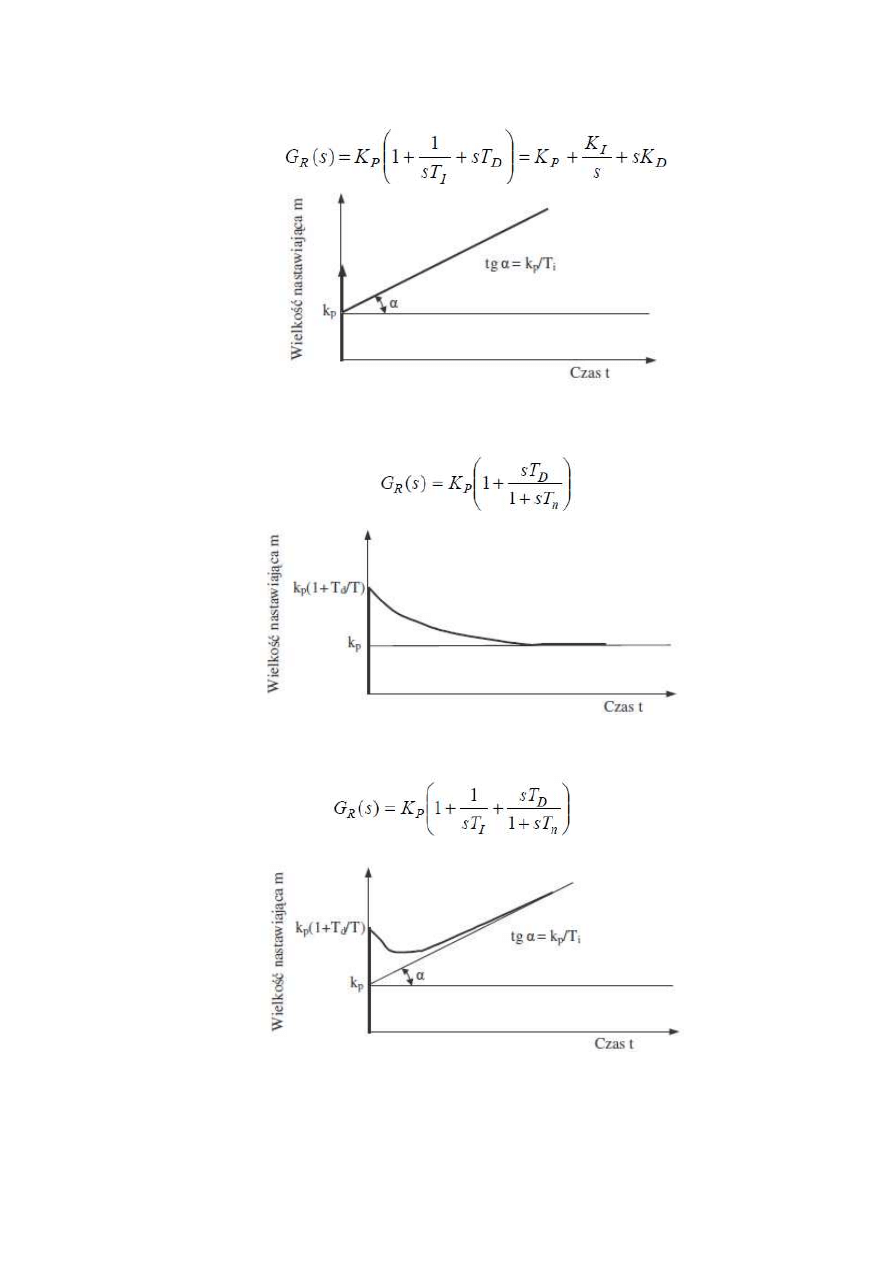
Proporcjonalno – całkująco - różniczkujący PID.
Rys.6 Charakterystyka skokowa regulatora PID
-
Regulator PD z realnym członem różniczkującym
Rys.7 Charakterystyka skokowa regulatora PID
-
Regulator PID z realnym członem różniczkującym
Rys.8 Charakterystyka skokowa regulatora PID
2.
Wskaźniki jakości określane na podstawie odpowiedzi skokowej
Charakter przebiegów przejściowych w liniowych układach sterowania bardzo często
jest badany po podaniu funkcji skokowej (jednostkowej) 1(t) na wejście układu. Wówczas
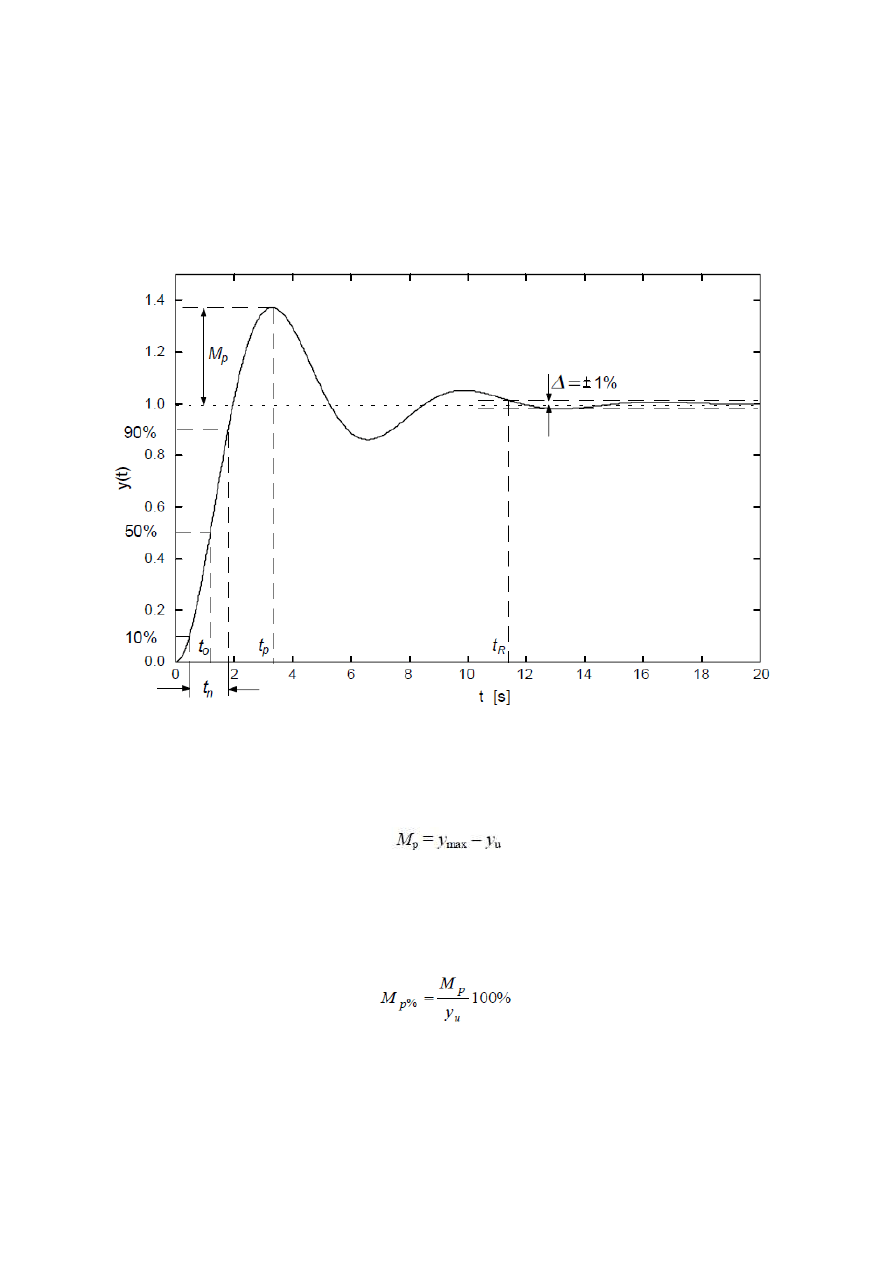
odpowiedź układu sterowania nazywana jest odpowiedzią skokową. Na rysunku 9
przedstawiona została typowa odpowiedź skokowa liniowego układu II rzędu.
Rys.9 Odpowiedź skokowa liniowego układu II rzędu
Na podstawie tej odpowiedzi definiowane są
następujące wskaźniki jakości charakteryzujące liniowe
uk
ł
ady sterowania w dziedzinie czasu:
1. Maksymalne przeregulowanie M
p
gdzie:
y(t)
−
odpowiedź
skokowa uk
ł
adu,
y
max
−
maksymalna wartość
y(t),
y
u
−
wartość
y(t) w stanie ustalonym (y
u
δ
y
max
).
Maksymalne przeregulowanie często określane jest jako procentowy udzia
ł
końcowej wartości
odpowiedzi skokowej
Maksymalne przeregulowanie bardzo często wykorzystywane jest do pomiaru stabilności względnej
układu sterowania. Układ z bardzo dużym przeregulowanie jest zazwyczaj niepożądany. Na etapie
projektowania układu zazwyczaj określa się wartość tego przeregulowania. Odpowiedź skokowa
układu z rysunku 2 pokazuje, że maksymalne przeregulowanie pojawia się przy pierwszym
przeregulowaniu. W pewnych układach maksymalne przeregulowanie może pojawiać się w jednym z
następnych pików i jest tak wówczas gdy transmitancja układu posiada nieparzystą liczbę zer w
prawej półpłaszczyźnie i mogą się wówczas pojawiać pierwsze przeregulowanie przy wartościach
ujemnych.
2. Czas opóźnienia
t
o
definiowany jako czas po którym odpowiedź skokowa osiąga 50% swojej
wartości końcowej. Pokazane jest to na rysunku 2.
3. Czas narastania
t
n
definiowany jest jako czas potrzebny do wzrostu odpowiedzi skokowej układu
od 10% do 90% wartości ustalonej.
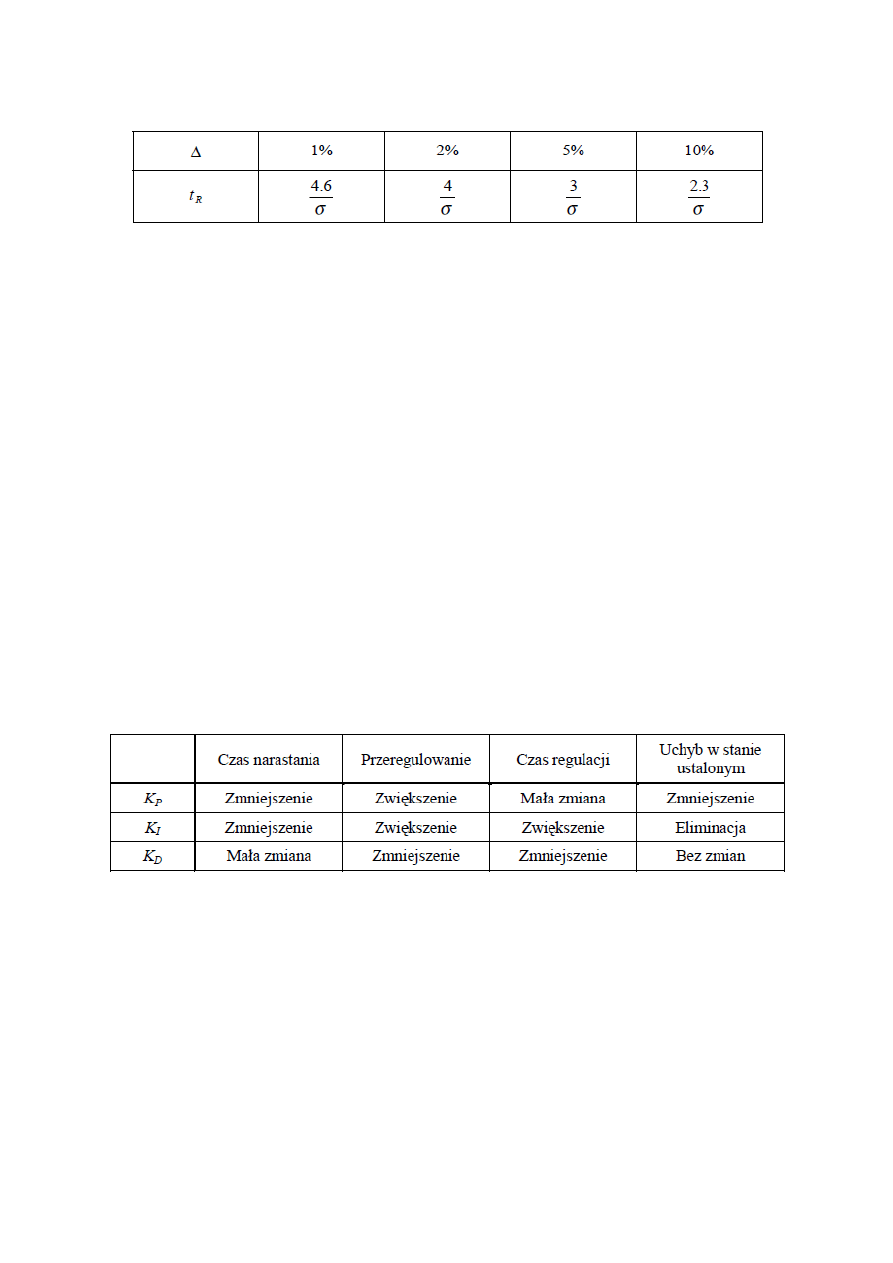
4. Czas ustalania (regulacji)
t
R
definiowany jako czas potrzebny do tego aby przejściowa odpowiedź
skokowa znalazła się i pozostała w pewnej określonej strefie dokładności ( ±1%, ± 2%, itd.,
patrz tabela 1) od wartości ustalonej. Najczęściej jest to 5% wartości ustalonej.
Te cztery powyższe wskaźniki umożliwiają bezpośredni pomiar charakterystyk przejściowych
układu sterowania na podstawie odpowiedzi skokowej. Wskaźniki te są łatwe do określenia
na pomierzonej charakterystyce odpowiedzi skokowej, natomiast trudno jest je wyprowadzić
analitycznie za wyjątkiem układów, których rząd jest mniejszy od trzeciego.
3.
Wzory aproksymujące czasowe wskaźniki jakości
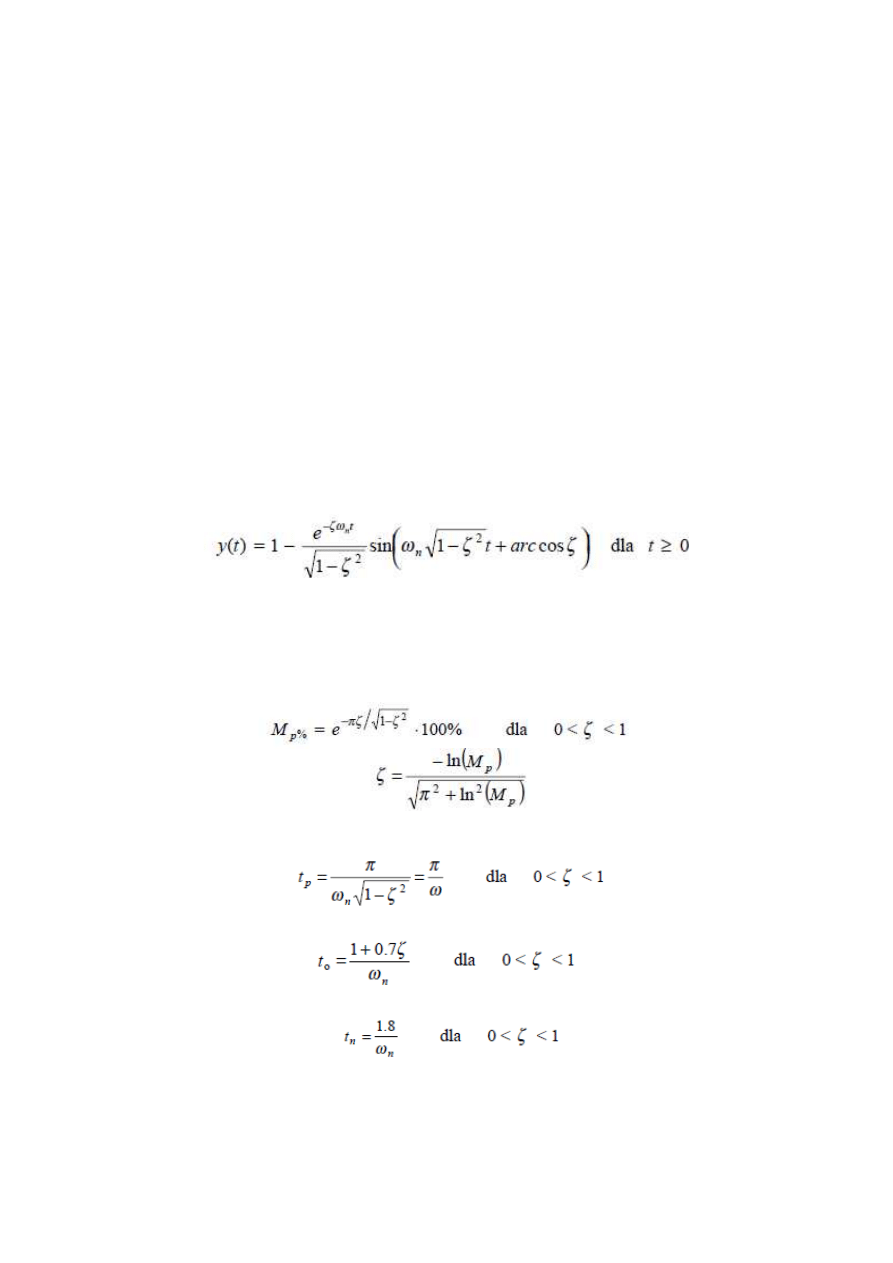
Jednostkowa odpowiedź skokowa wyznaczona z odwrotnej transformaty Laplace'a
transmitancji
opisana jest wzorem
Na podstawie odpowiednich przekształceń wzoru analitycznego (5) opisującego
odpowiedź skokową układu II rzędu możliwe jest określenie wzorów pozwalających na
zaprojektowanie układu II rzędu spełniającego odpowiednie wymagania. Poniżej znajdują się
wzory aproksymujące czasowe wskaźniki jakości układu II rzędu:
-
amplituda maksymalnego przeregulowania wyrażona procentowo
-
chwila czasu t
p
w której pojawia się maksymalne przeregulowanie
-
czas opóźnienia t
o
-
czas narastania t
n
Gdzie
ξ – współczynnik tłumienia
ω
n
– częstotliwość drgań własnych
σ - ω
n *
ξ
-
czas ustalania t
R
(regulacji) według tabeli
4.
Dobór nastaw regulatora
W praktycznych zastosowaniach, regulator PID strojony jest w układzie regulacji w którym
akurat jest zastosowany. Reguły strojenia w skrócie można streścić następująco:
1. Ustalenie wartości Kp celem uzyskania wymaganej prędkości odpowiedzi.
Zwiększanie wzmocnienia proporcjonalnego zwiększa prędkość odpowiedzi i
redukuje uchyb w stanie ustalonym.
2. Dobór sterowania całkującego 1 TI celem osiągnięcia pożądanej jakości w stanie
ustalonym (może zaistnieć konieczność skorygowania wartości wzmocnienia Kp).
Zwiększanie działania całkującego 1 TI pogarsza stabilność, ale służy do
likwidacji uchybu w stanie ustalonym.
3. Dodanie sterowania różniczkującego celem zredukowania przeregulowań i
poprawy czasu regulacji. Zwiększanie stałej różniczkowania poprawia stabilność i
służy do tłumienia oscylacji
Sterowanie proporcjonalne z nastawą KP ma wpływ na zmniejszanie czasu narastania i będzie
zmniejszało uchyb w stanie ustalonym, lecz nigdy nie będzie go eliminowało. Sterowanie
całkujące z nastawą KI ma wpływ na eliminowanie uchybu w stanie ustalonym, lecz pogarsza
odpowiedź w stanie przejściowym. Sterowanie różniczkujące z nastawą KD ma wpływ na
zwiększenie stabilności układu, zmniejszając przeregulowanie i poprawiając odpowiedź
przejściową. Wpływ nastawy każdego sterowania KP, KD oraz KI na układ zamknięty
zebrany został w tabeli pokazanej poniżej
Związki te nie zawsze są dokładnie takie jak podane w tabeli, faktycznie zmiana jednej z tych
zmiennych może powodować zmianę pozostałych. Z tego powodu tabela ta powinna być
używana jako odniesienie przy określaniu wartości KP, KI oraz KD.
Przy strojeniu regulatora PID dla danego układu należy wykonać następujące kroki w celu
uzyskania pożądanej odpowiedzi :
1. Wyznaczenie odpowiedzi układu regulacji z obiektem, ale bez regulatora i określenie co
powinno zostać poprawione;
2. Dodanie sterowania proporcjonalnego w celu poprawienia czasu narastania i zmniejszenia
uchybu w stanie ustalonym;
3. Dodanie sterowania różniczkującego w celu poprawienia przeregulowania;
4. Dodanie sterowania całkującego w celu wyeliminowania uchybu w stanie ustalonym;
5. Dostrojenie każdej z nastaw KP, TI oraz TD aż uzyska się pożądaną odpowiedź całego
układu.
Zawsze można posiłkować się tabelą pokazaną w tym opracowaniu, aby odszukać na jakie
wielkości charakterystyczne wpływają poszczególne sterowania. Nie jest konieczne
zastosowanie wszystkich trzech elementów regulatora (proporcjonalnego, różniczkującego,
oraz całkującego) w pojedynczym układzie. Dla przykładu, jeśli regulator PI daje
wystarczającą odpowiedź, wówczas nie ma potrzeby stosowania regulatora różniczkującego
w układzie. Należy stosować możliwie najprostszy regulator.
Dla każdego procesu istnieje możliwość ścisłej analizy teoretycznej układów sterowania,
która pozwala na dowolne wyznaczenie właściwości projektowanego układu, metodyka taka
nie jest jednak przydatna w praktyce, gdyż w tym przypadku przy dobieraniu nastaw
regulatorów bardzo rzadko dysponuje się dokładnymi danymi dotyczącymi obiektu. Zadanie
doboru nastaw regulatorów polega na takim ustaleniu wartości parametrów, aby otrzymać
zadowalające działanie układu sterowania.
Pomiary własności dynamicznych obiektów regulacji metodą skoku jednostkowego
Optymalne nastawy regulatorów opracowywane są zazwyczaj w postaci tabel, wykresów,
wzorów empirycznych zwykle dla obiektów podzielonych na dwie klasy: obiekty statyczne i
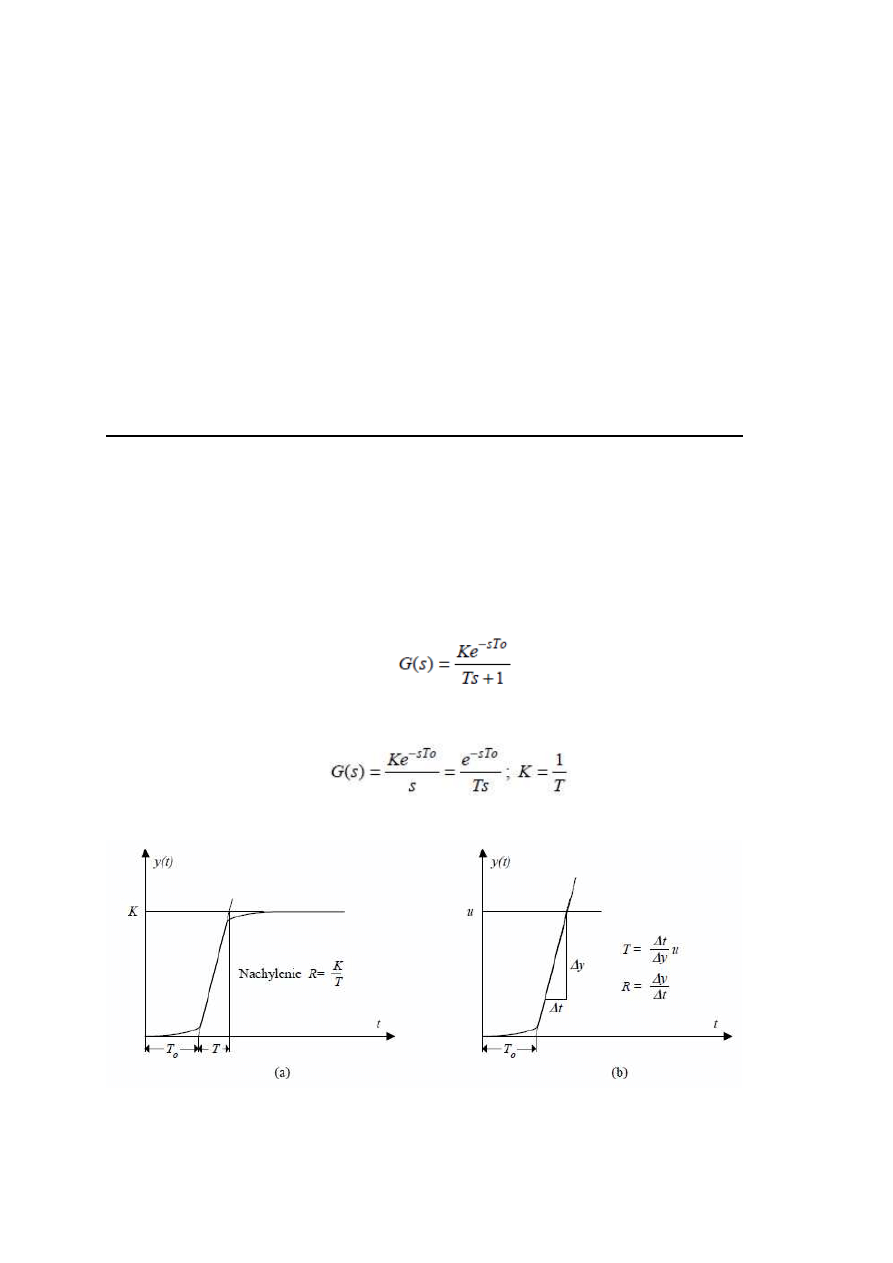
obiekty astatyczne, których charakterystyki aproksymuje się następującymi transmitancjami :
-
obiekty statyczne - czyli takie, w których wielkość sterowana (regulowana) „y”
osiąga stan ustalony w otwartym układzie sterowania (bez pomocy
regulatora).W obiektach tych po pewnym czasie od zaistnienia zmiany
wielkości wejściowej na wyjście samoczynnie ustala się nowa wartość:
-
obiekty astatyczne - czyli takie, w których wielkość sterowana „y” nie może
osiągnąć stanu ustalonego bez pomocy regulatora:
Sposób wyznaczania parametrów modelu K, T, To odwzorowującego obiekt na podstawie
odpowiedzi na skok jednostkowy pokazano na rysunku
Rys. 10. Sposób określania parametrów K, T, T
0
na podstawie odpowiedzi skokowej
(jednostkowej) dla (a) obiektu statycznego, (b) obiektu astatycznego
(1)
(2)
Gdzie
K – zastępczy współczynnik proporcjonalności obiektu
T
0
– zastępcze opóźnienie obiektu
T – zastępcza stała czasowa obiektu
Metody doboru nastaw regulatorów według zasad Zieglera-Nicholsa
Na bazie obserwacji eksperymentalnych strategii strojenia regulatorów PID w procesach
przemysłowych, Ziegler i Nichols zaproponowali dwie metody doboru nastaw. Metody te
wymagają pomiaru odpowiedzi układu i są powszechnie stosowane dla układów typu 0
najczęściej spotykanych w układach sterowania (np. sterowanie poziomem, temperaturą,
ciśnieniem, przepływem, itd.). Metody doboru nastaw opracowane przez Zieglera i Nicholsa
opierająca się odpowiedzi skokowej i możliwe są do zastosowania w tych układach w których
odpowiedź skokowa układu otwartego jest bez przeregulowań tak jak ta pokazana na rysunku
a. Ziegler i Nichols opracowali dwie metody strojenia regulatorów dla takich modeli.
Metoda bazująca na odpowiedzi skokowej
Ziegler i Nichols zauważyli, że odpowiedź skokowa większości układów sterowania ma
kształt podobny do tego z rysunku 10a. Krzywa ta może być otrzymana z danych
eksperymentalnych lub symulacji dynamicznej obiektu. Krzywa o kształcie S jest
charakterystyczna dla układów wyższych rzędów.
Transmitancja (1) aproksymuje układy wyższych rzędów prostym układem I rzędu z
dodatkowym opóźnieniem To wyrażonym w sekundach. Stałe w równaniu (1) mogą być
określone z odpowiedzi skokowej procesu. Jeśli styczna narysowana jest w punkcie
przegięcia krzywej odpowiedzi, wówczas nachylenie linii jest wyznaczane ze wzoru R=K/T, a
przecięcie stycznej z osią czasu określa czas opóźnienia To
.
W pierwszej metodzie wybór parametrów regulatora opiera się na współczynniku zanikania
równym w przybliżeniu 0.25. Oznacza to, że dominująca składowa przejściowa zanika do
jednej czwartej swojej wartości maksymalnej po jednym okresie oscylacji (rys. 11a). Takie
zanikanie odpowiada współczynnikowi ζ = 0.21 w układzie II rzędu i wartość ta ustalona
została na zasadzie kompromisu pomiędzy szybką odpowiedzią i wystarczającym zapasem
stabilności.
Autorzy symulowali równania dla różnych układów na komputerze analogowym i stroili
parametry regulatorów, aż uzyskali odpowiedzi przejściowe zanikające do 25% poprzedniej
wartości w jednym okresie. Metoda Zieglera-Nicholsa bazująca na odpowiedzi skokowej daje
dobre rezultaty gdy spełniony jest następujący warunek:
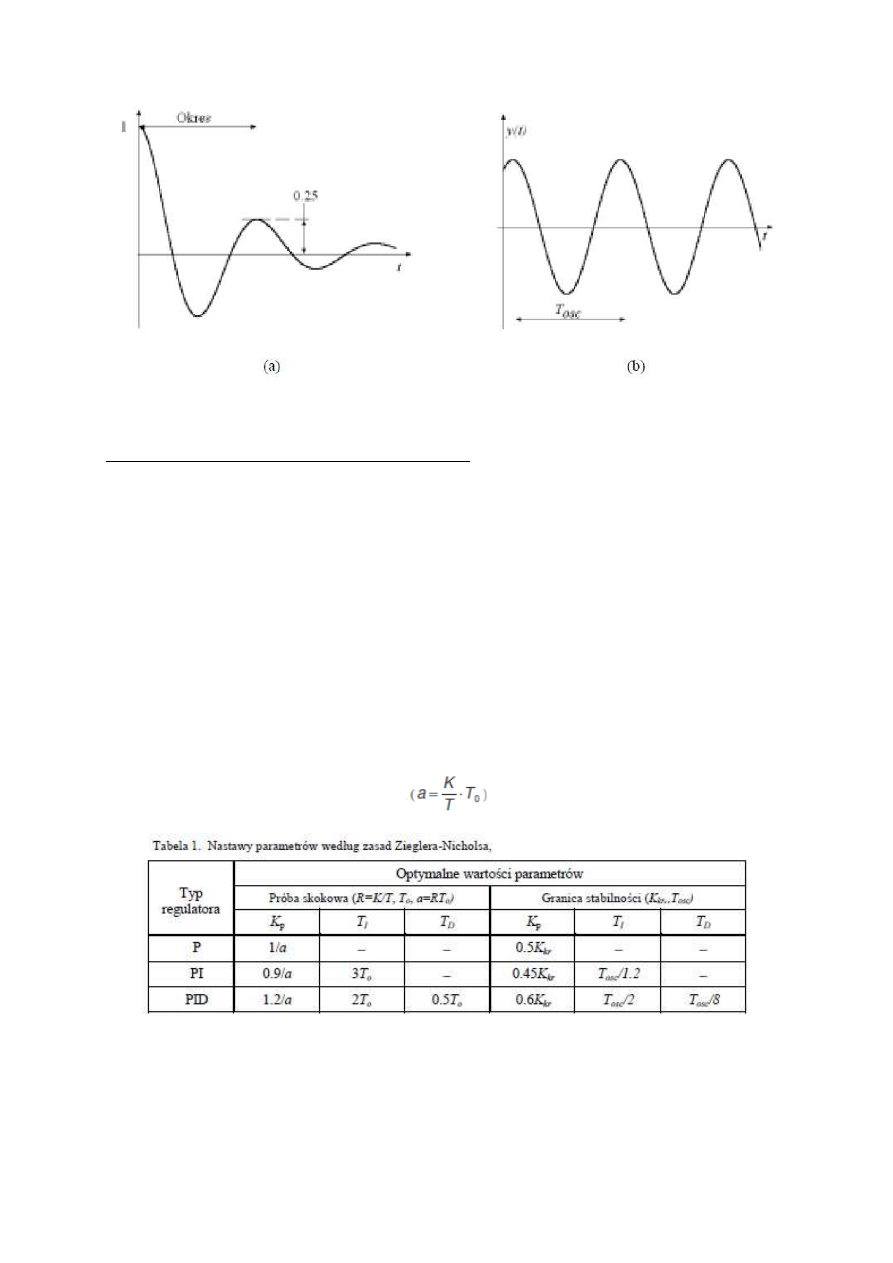
Rys. 13. Przebiegi czasowe (a) kwadratowy współczynnik zanikania, (b) układ na granicy
stabilności
Metoda z wyznaczaniem wzmocnienia krytycznego
W praktyce inżynierskiej zdarza się, że transmitancja obiektu regulacji nie jest znana i nie ma
możliwości jej wyznaczenia, a mimo to regulator należy zastosować i dobrać jego nastawy.
Wówczas można wykorzystać drugą zasadę Zieglera-Nicholsa pozwalającą dobrać nastawy
regulatora bez znajomości transmitancji obiektu. Z zasady tej wynika następujący tok
postępowania:
-
regulator zainstalowany przy obiekcie należy nastawić na działanie proporcjonalne P
i zwiększać stopniowo współczynnik wzmocnienia k
p
regulatora dochodząc do
granicy stabilności
-
w stanie wzbudzonych oscylacji należy zmierzyć ich okres T
osc
oraz współczynnik
wzmocnienia k
p
=k
kr
, przy którym powstały oscylacje
-
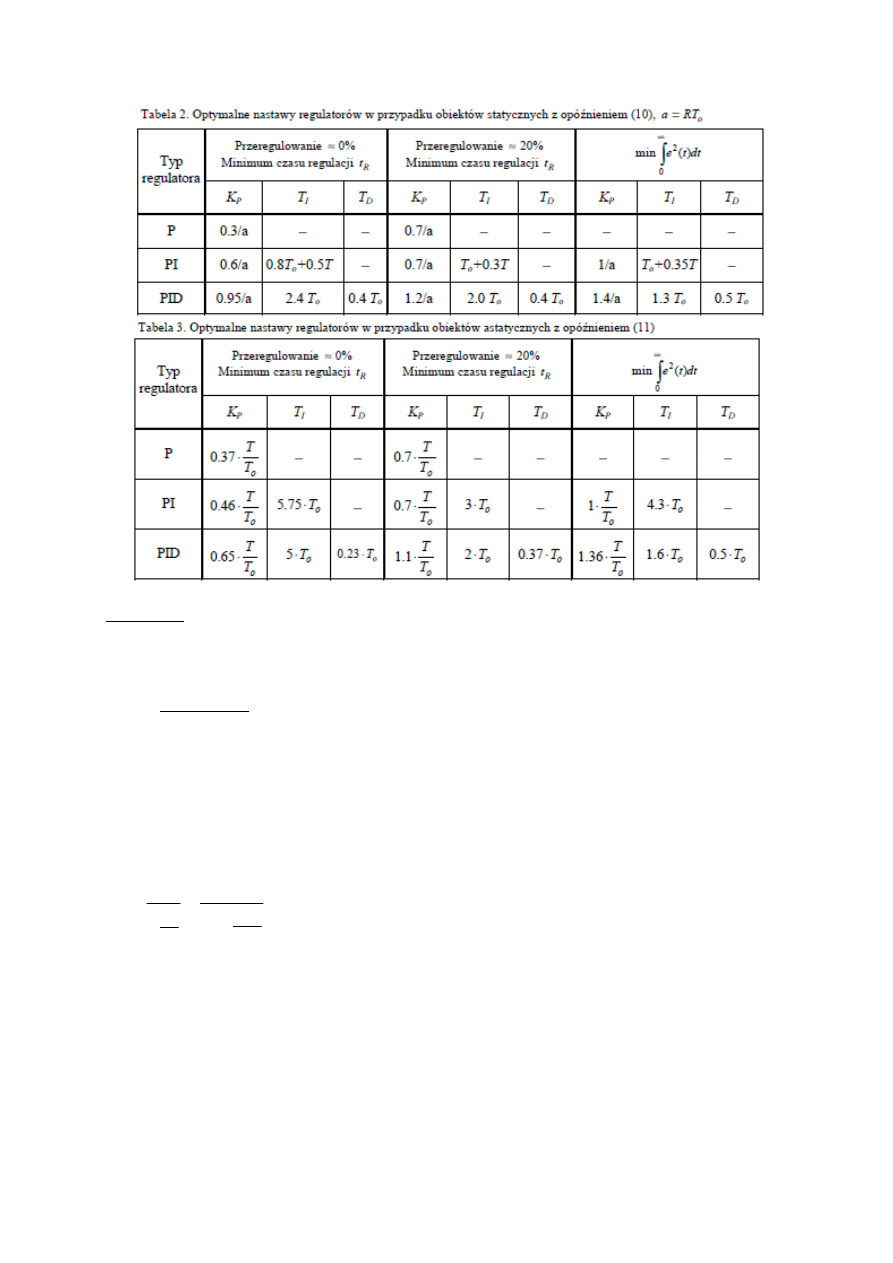
zależnie od typu regulatora należy przyjąć parametry z tabeli 1.
Oczywiście, podana zasada tu nie zapewnia optymalnych nastaw regulatora, a pozwala
jedynie dobrać nastawy, przy których układ regulacji może poprawnie działać.
Przykład 1
Obiektem regulacji jest komora grzejna o transmitancji :
( )
(
)
s
T
s
T
A
C
k
sT
sT
k
s
G
o
o
300
15
/
5
,
0
1
exp
0
=
=
=
+
−
=
Obliczyć optymalne nastawy regulatora PID współpracującego z tym obiektem, tak aby przy
20% przeregulowaniu przebiegu przejściowego czas regulacji t
r
był minimalny.
Korzystamy z tabeli 3 – kryterium 20% przeregulowania i minimum czasu regulacji t
r
. Z
tabeli otrzymujemy :
s
s
T
T
s
s
T
T
C
A
T
T
k
k
o
d
o
i
o
o
p
6
15
4
,
0
4
,
0
30
15
2
2
/
48
300
15
5
,
0
2
,
1
2
,
1
=
⋅
=
=
=
⋅
=
=
=
⋅
=
=
Wyszukiwarka
Podobne podstrony:
Instrukcja do ćw 11 Regulowanie nastaw regulatora na podstawie krytycznego nastawienia regulatora P
REGULACJA PID , Energetyka, sem5, sem5, met.ZN
BADANIE STATYCZNYCH I DYNAMICZNYCH WŁAŚCIWOŚCI REGULATORÓW PID
04Nastawy regulatora PID
REGULATOR PID, SGGW Technika Rolnicza i Leśna, Automatyka, Sprawozdania
Badanie układu sterowania z regulatorem PID
INSTRUKCJA REGULACJI NIEZALEśNEGO SPRZĘGŁA WŁĄCZANIA WOM W (2)
Regulator PID Cool
Regulator PID (2)
DOBÓR NASTAW REGULATORA PID
automaty-sprawko-pid, Temat ćwiczenia: REGULATORY PID
Regulator Pid
H Juszka i in Sterowanie logiczne z regulacja PID
PID-B, regulatory PID:
Ćw 6 Regulacja PID
Dobór parametrów regulatora PID – symulacja komputerowa
Instrukcja regulator przep
więcej podobnych podstron