Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
1 z 6
INSTRUKCJA DO ĆWICZENIA 11.
PRZEDMIOT: Zajęcia praktyczne w pracowni urządzeń mechatronicznych.
TEMAT: Regulowanie nastaw regulatora na podstawie krytycznego nastawienia
regulatora PID wg Zieglera i Nicholsa.
Cel ćwiczenia: Zapoznanie się z budową regulatora PID, przeprowadzenie nastaw regulatora
PID metodą Zieglera – Nicholsa.
Imię
Nazwisko
Grupa
Rok szkolny
OCENA:
1. Wprowadzenie.
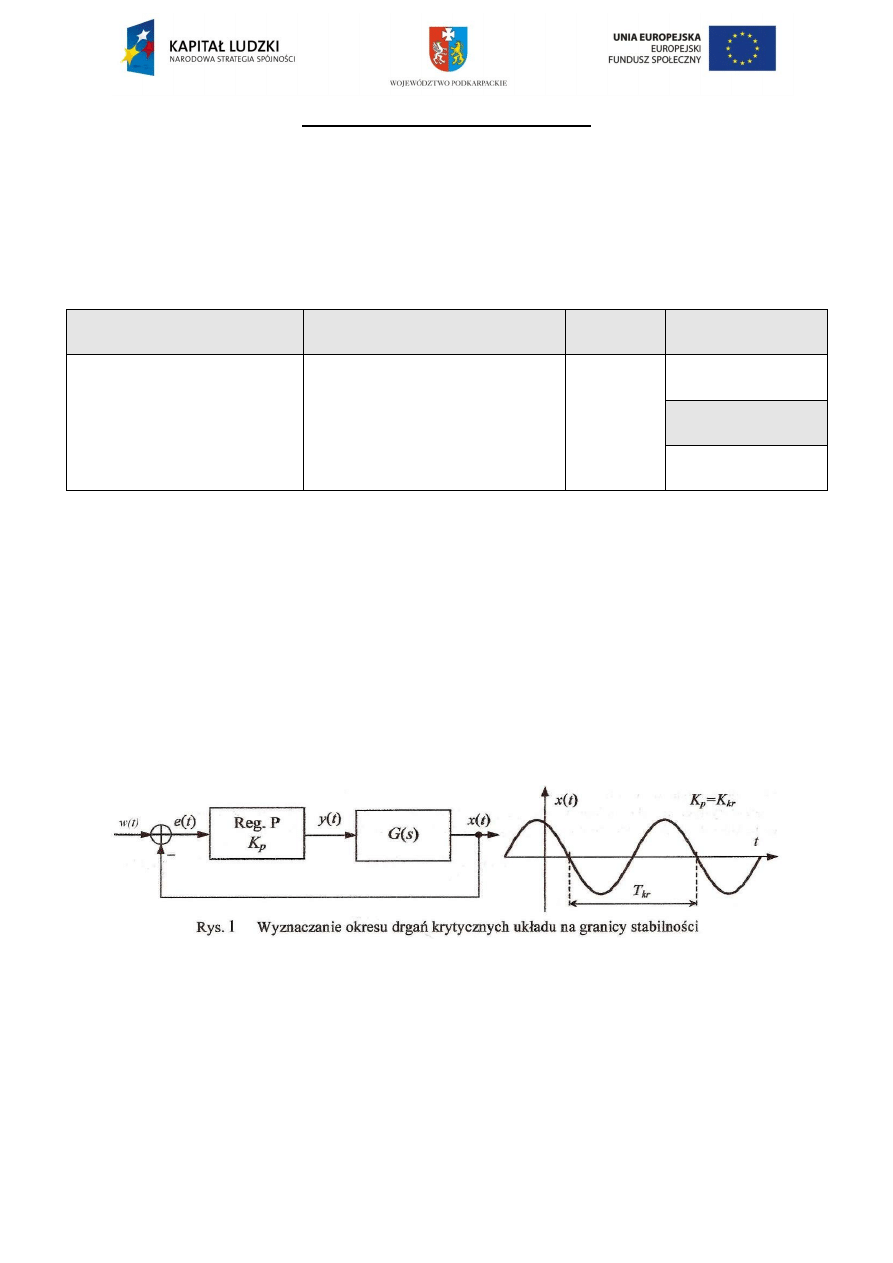
Metoda nastaw regulatora PID według Zieglera - Nicholsa polega na
określeniu pewnych parametrów układu automatycznej regulacji, które można w
prosty sposób wyznaczyć doświadczalnie. Pełna znajomość modelu obiektu nie
jest potrzebna.
Metoda ta, nazywana również metodą opartą na wskaźnikach wzmocnienia
krytycznego, opiera się na znajomości parametrów układu znajdującego się na granicy
stabilności. Parametry te są wyznaczane w następujący sposób: w układzie zamkniętym z
regulatorem typu P zwiększa się współczynnik K
p
dopóki w odpowiedzi skokowej nie
zaobserwuje się drgań niegasnących. W takim stanie należy zanotować wartość
wzmocnienia krytycznego regulatora K
p
= K
r
oraz zmierzyć okres drgań krytycznych T
kr
.
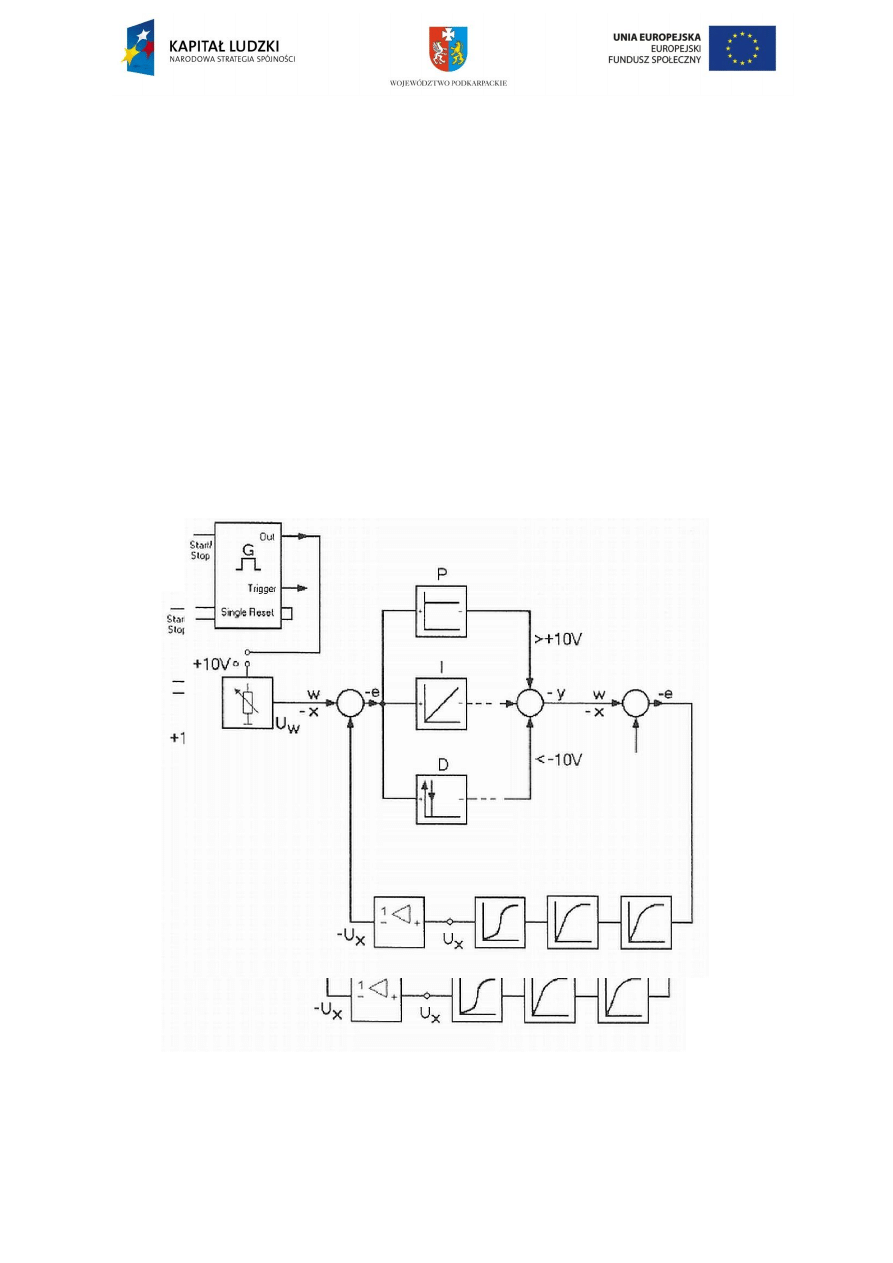
Metoda optymalizacji wg Zieglera i Nicholsa wyjaśniona zostanie na przykładzie
symulowanego obiektu regulacji z pięcioma połączonymi jedna opcją za drugą stałymi
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
2 z 6
czasowymi. I.G. Ziegler i N.B. Nichols znaleźli metodę do optymalizacji dla przypadku,
gdy w obwodzie regulacyjnym nie da się zmierzyć odpowiedzi skokowej. Wyszli oni z
założenia:
1.obwód regulacyjny jest kompletny,
2. obiekt regulacyjny wyższego rzędu może charakteryzować się zachowaniem P-T
1
-T
x
3. regulator może być użyty jako regulator P,
4. obwód regulacyjny może pracować na granicy stabilności.
Obiekt regulacji z zachowaniem P-T1-Tx występuje np. wtedy, gdy istnieje
nominalny czas opóźnienia, dla pomiarów realizowanie jest przez to pięć członów P-T1 ze
zróżnicowanymi stałymi czasowymi.
Doprowadzanie obwodu regulacyjnego do granicy stabilności oznacza, że
wzmocnienie regulatora P w takim stopniu zostaje podwyższone, aż obwód regulacyjny
wykonuje stabilne drgania własne i tym samym pracuje jako oscylator.
Obiekt regulacji składa się z członu P-T3, do którego podłączone są jeszcze dwa
człony P-T
1
. oba mają stałą czasową T~ 0.05s: wtyczka na 0.01s a potencjometr w pozycji
pośredniej. Terowanie programowe trzeba nastawić dla wszystkich pomiarów na długość
cyklu T=50ms.
Rys. 2 Układ pomiarowy do optymalizacji nastaw regulatora.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
3 z 6
2. Ćwiczenia.
2.1. Parametry obiektu regulacji.
Zbudować kompletny obwód regulacyjny. Jako regulator posłuży nam najpierw
regulator P z małym wzmocnieniem np. z K
P
= 5. Wybieramy wartość żądaną U
w
= 4V. Za
pomocą oscyloskopu odczytujemy przebiegi U
w
i U
x
. Podwyższać współczynnik
proporcjonalności K
P
regulatora P tak, aż wyraźnie będzie można rozpoznać, że obwód
regulacyjny wykonuje stabilne drgania własne. Wtedy nastawione zostało krytyczne
wzmocnienie regulatora KPk. Proszę ustalić długość cyklu Tk tych drgań własnych i
nanieść obie wartości do tabeli 1.
Tabela 2 zawiera obliczenia Zieglera i Nicholsa dla poszczególnych typów
regulatorów. Obliczyć wartości regulatora i wpisać bezpośrednio do tabeli.
Zwrócić uwagę przy sterowaniu, czy wtyczka RESET i gniazdka SINGLE są
otwarte!!
2.2. Optymalizacja regulatora.
Dla wszystkich pomiarów długości cyklu sterowania programowego wynosi T=
50ms. Wartości regulatora należy tak nastawić, że wykraczają one poza zakres tablicy
PID, należy przekręcić nastawnik do oporu.
Pomiar nr 1 (regulator P): Kompletny obwód regulacyjny zbudowany jest wraz z
regulatorem P. Nastawić na regulatorze współczynnik przenoszenia, który został
obliczony w tabeli 2. Zmierzyć i zarejestrować odpowiedź skokową U
w
i U
x
= f(t)
(Oscylogram 1).
Pomiar nr 2 (regulator PI): powtórzyć pomiar nr 1 dla regulatora PI (Oscylogram 2).
Pomiar nr 3 (regulator PID): powtórzyć pomiar nr 1 dla regulatora PID (Oscylogram 3).
Zwrócić uwagę przy sterowaniu, czy wtyczka RESET jest włożona a gniazdka SINGLE
są otwarte!!
Tabela 1.
Krytyczne wzmocnienie regulatora
Długość cyklu drgań
KP
k
=
Tk=
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
4 z 6
Tabela 2. Wartość regulatorów wg Zieglera i Nicholsa.
Typ regulatora
K
P
Czas cofania T
n
Parametr nastawny
regulatora
Regulator P
K
P
= 0.5 x K
Pk
K
P
=
xxxx
xxxx
Regulator PI
K
P
= 0.45 x K
Pk
K
P
=
T
n
=0.85 x T
k
T
I
= Tn /
Kp Tn = T
I
=
xxxx
Regulator PID
K
P
= 0.6 x K
Pk
K
P
=
T
n
=0.85 x T
k
T
I
= Tn /
Kp Tn = T
I
=
T
v
=0.12 x T
k
T
D
= Tv x
Kp
Tv = T
D
=
3. Przebieg ćwiczenia.
- przygotowanie stanowiska do wykonania poszczególnych ćwiczeń:
- przygotowanie panelu dydaktycznego PID BOARD,
- przygotowanie przewodów łączeniowych,
- przygotowanie oscyloskopów i multimetrów, wykonanie właściwych pomiarów obiektu
regulacji „I" bez opóźnienia i z opóźnieniem
- wykonanie połączeń zgodnych ze schematem pomiarowym,
- odrysowanie oscylogramów,
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
5 z 6
4. Oscylogramy do ćwiczeń.
Projekt "Modernizacja oferty kształcenia zawodowego w powiązaniu z potrzebami lokalnego/
regionalnego rynku pracy" współfinansowany ze środków Unii Europejskiej w ramach Europejskiego
Funduszu Społecznego.
6 z 6
Wyszukiwarka
Podobne podstrony:
Instrukcja do ćw 04 Wizualizacja procesów przemysłowych na przykładzie dydaktycznego stanowiska MPS
GAKUDO YOJIN SHU Dogena Zenji Zbiór instrukcji do studiowania i praktykowania Drogi z komentarzami n
Biofizyka instrukcja do cw nr 11
Biofizyka instrukcja do cw nr 11
Instrukcja do ćw 20 Regulacja dwupołożeniowa temperatury – symulacja komputerowa
Instrukcja do ćw 20 Regulacja dwupołożeniowa temperatury – symulacja komputerowa
MSIB Instrukcja do Cw Lab krystalizacja
Instrukcja do ćw 18 Montaż i demontaż magazynu składowania MPS
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Biofizyka instrukcja do cw nr 23
Biofizyka instrukcja do cw nr 0 Nieznany (2)
instrukcje do ćw mięso, mięso
Instrukcja do ćw 15 Montaż i uruchomienie układu nawrotnego silnika indukcyjnego
Biofizyka instrukcja do cw nr 09
Biofizyka instrukcja do cw nr 03
Ćwiczenia, Instrukcja do ćwiczenia 7, Instrukcja do ćwiczenia 11:
CHROMATOGRAFIA GAZOWA instrukcja do ćw
więcej podobnych podstron