
28.05.2012
Sprawozdanie
Cykl 3 temat 3
„Dobór nastaw regulatora PID”
Grupa C5
Grupa ćwiczeniowa C2
Celiński Patryk
Drzewiecki Dominik
Gembicki Jacek
Kozak Marta
Słabik Ewa
Walczak Justyna
Warda Paulina
Wprowadzenie
Dobór nastaw regulatorów ma na celu optymalizację pracy układu automatycznej regulacji.
Metody określania nastaw:
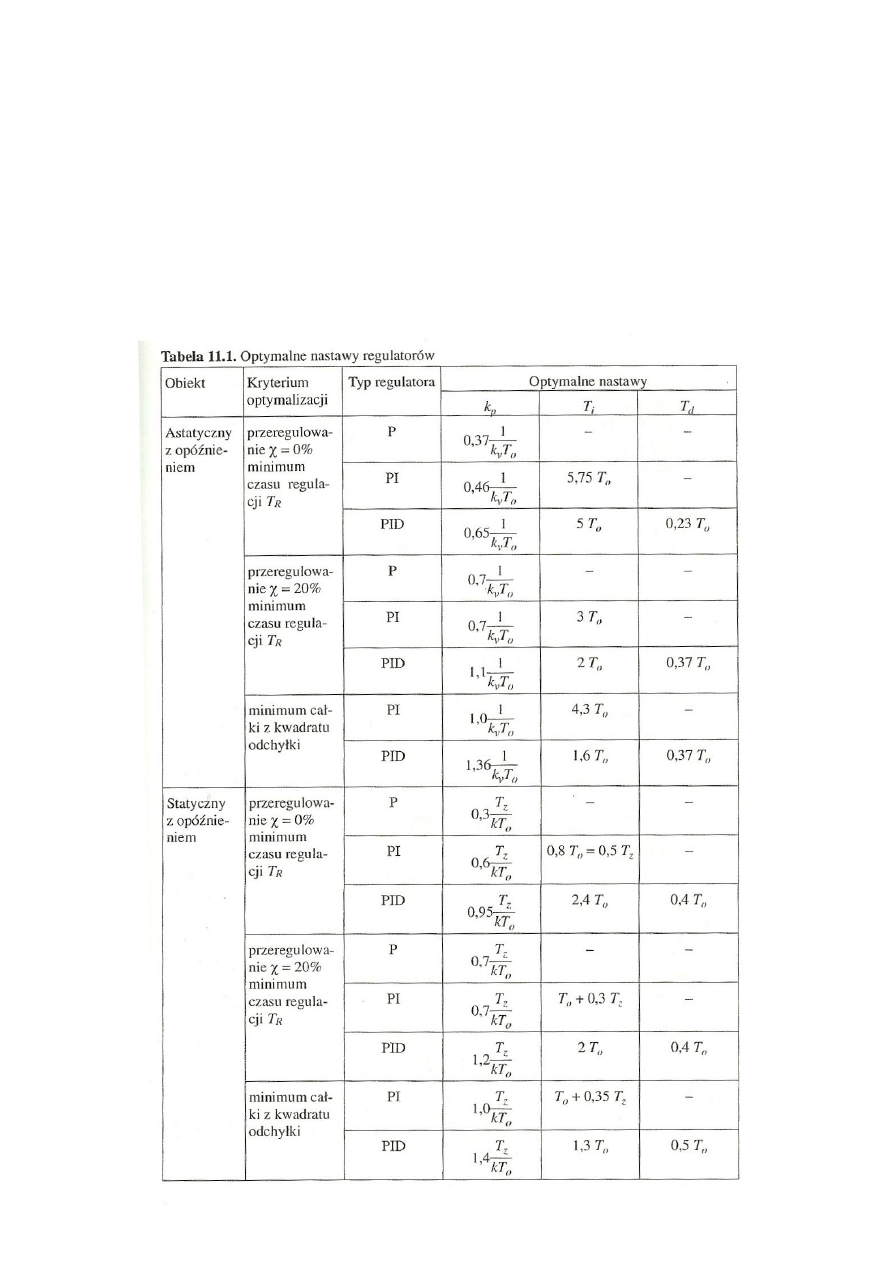
1) Na podstawie pomiarów parametrów charakterystyki skokowej.
Metoda polega na obliczeniu parametrów odpowiedzi skokowej obiektu i doborze nastawy
zgodnie z założonym przebiegiem regulacji wg poniższego zestawienia.

2) Metoda Zieglera i Nicholsa
Polega na przeprowadzeniu następującej procedury:
- regulator zainstalowany w układzie nastawić na działanie P, i zwiększać stopniowo
współczynnik wzmocnienia Kp aż do granicy stabilności.
- W stanie wzbudzonych oscylacji układu zmierzyć okres Tosc oraz współczynnik
wzmocnienia Kp kryt, przy którym wystąpiły oscylacje.
- zależnie od regulatora należy przyjąć:
Dla P:Kp= 0,5 Kp kryt
Dla PI: Kp= 0,45 Kp kryt; Ti= 0,85T osc
Dla PID: Kp= 0,6 Kp kryt; Ti= 0,5 Tosc; Td= 0,12 Tosc
Cel ćwiczenia
Celem ćwiczenia było poznanie sposobów doboru nastaw regulatorów według reguł
Zieglera-Nicholsa oraz na podstawie charakterystyk dynamicznych obiektu.
Podczas ćwiczeń wykorzystano ze stanowiska badawczego wyposażonego w model suszarki,
panel członów inercyjnych, panel zakłócenia skokowego i panel regulatora. Regulator
nastawiono na działanie proporcjonalne, ustawiono wartość zadaną równą 52st. C,
wprowadzono zakłócenie skokowe zmieniając współczynnik wzmocnienia co widać na
wydrukach z odpowiedziami skokowymi układu.
Wariant 1 – Kp= 1,78 Wariant 4 – Kp= 18,78
Wariant 2 – Kp= 4,78 Wariant 5 – Kp=38,78
Wariant 3 – Kp= 8,78
Układ doprowadzono do granicy stabilności. Zmierzono okres oscylacji= 60s, i współczynnik
Kp= 38,78. Następnie obliczono:
Kp= 23,27; Ti= 0,5*60= 30; Td= 0,12*60= 7,2
Następnie zastosowano obliczone nastawy.

Wnioski:
Regulator pracujący proporcjonalnie:
- im mniejszy był współczynnik wzmocnienia Kp tym większa była odchyłka regulacji e stat i
błąd ststyczny
- Wraz ze zwiększaniem wartości Kp szybciej następowała zmiana temperatury, ale
zwiększały się też wahania wartości temperatury przed osiągnięciem wartości zadanej. Przy
najwyższych wartościach Kp występowało też przeregulowanie.
- Wartość mocy grzałki była proporcjonalna do wartości współczynnika Kp. Przy
najmniejszej wartości współczynnika (Kp=1,78) Odchyłka statyczna (e stat
1
) była na tyle
duża, że temperatura nie ustabilizowała się na wartości zadanej temperatury, tylko na nieco
mniejszym poziomie.
- Po nastawieniu współczynnika wzmocnienia na Kp=4,78 początkowa moc grzałki
dochodziła do 85%, potem spadała i na koniec stabilizowała się dosyć szybko i suszarka
szybko osiągnęła wartość zadaną (z niewielką odchyłką).
- W przypadkach, gdy współczynnik wzmocnienia wynosił 8,78 i więcej początkowa moc
grzałki wzrastała gwałtownie do osiągnięcia pułapu 100%, następnie w wyniku
przeregulowania spadała do 0% aby na koniec ustabilizować się bądź oscylować w
niewielkim przedziale.
- Podczas pracy przy współczynniku Kp=38,78 zaobserwowano wyraźne niegasnące
oscylacje. Nastąpił punkt krytyczny, na podstawie którego należało wyznaczyć nastawy.
Regulator pracujący całkująco- różniczkująco-proporcjonalnie:
- Po zastosowaniu obliczonych nastaw temperatura suszarki szybko osiągnęła wartość
zadaną, odchyłka statyczna e stat była równa 0. Początkowa moc grzałki nie osiągnęła
100%, nie było więc znacznego przeregulowania, ale po stabilizacji temperatury można było
zarejestrować niekorzystne wahania mocy grzałki.
Wyszukiwarka
Podobne podstrony:
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ CHARAKTERYSTYK SKOKOWYCH
DOBÓR NASTAW REGULATORÓW TYPU PID METODĄ ZIEGLERA NICHOLSA
09 Dobór rodzaju i nastaw regulatorów PID
Banas Chrabaszcz zaoczne Dobor nastaw regulatorów
05 Dobor nastaw regulatora w ko Nieznany (2)
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Dobór parametrów regulatora PID – symulacja komputerowa
Dobór nastaw regulatorów
Dobór nastaw regulatorów
Dobór nastaw regulatora
syposz,podstawy automatyki, DOBÓR NASTAW REGULATORÓW
15 dobor nastaw regulatoraid 16127 ppt
888 banas chrabaszcz zaoczne dobor nastaw regulatorow, szkoła PŚK, Automatyzacja
Metody przybliz onego doboru nastaw regulatoro w PID
nastawa regulatora pid, Studia, Automatyka
Dobór parametrów regulatora PID – symulacja komputerowa
Objawy złych nastaw regulatora PID
6 Dobór nastaw regulatorów
więcej podobnych podstron