Sprawozdanie ,,M13”
MARCIN DYRKA
|
ĆWICZENIE ,,M13” WYZNACZANIE WSPÓŁCZYNNIKA SPRĘŻYSTOŚCI ORAZ STAŁEJ TŁUMIENIA DRGAŃ MECHANICZNYCH
|
||
FIZYKA I ROK
|
OCENA Z KOLOKWIUM |
OCENA ZE SPRAWOZDANIA |
OCENA KOŃCOWA |
DR S. TKACZYK |
|
|
|
I.WSTĘP TEORETYCZNY
Ciało stałe może podlegać działaniu różnych sił doznając przy tym różnego rodzaju odkształceń. Pod wpływem sił rozciągających ciało wydłuża się a pod wpływem takich sił jak skręcanie i uginanie, ulega złożonym deformacjom. W zależności od wielkości siły odkształcającej i rodzaju ciała, ciało może ulegać odkształceniom przejściowym lub trwałym. Jeżeli po usunięciu siły odkształcającej ciało powraca do rozmiarów początkowych - odkształcenie nazywamy sprężystym. Spostrzeżenia te po raz pierwszy zostały sformułowane przez Roberta Hooke'a (1635 - 1703) następująco:
Wielkość odkształceń sprężystych jest wprost proporcjonalna do wielkości sił odkształcających.
Rodzaje odkształceń:
odkształcenia objętościowe występuje wówczas gdy na powierzchnię ciała
działa wszędzie ciśnienie (naprężenie przeciwdziałające oddalaniu się molekuł). Wtedy bowiem nie zmienia się kształt ciała, lecz zmieniają się jego rozmiary. Ze zmianą rozmiarów związana jest zmiana objętości. Zmiana objętości przy tych samych siłach zewnętrznych jest tym większa, im większa jest objętość tego ciała. Miarę odkształcenia ciała jest, zatem nie zmiana objętości ∆V, bo każda jednostka objętości zmienia się jednakowo, lecz zmiana objętości przypadająca na jednostkę objętości pierwotnej, a więc stosunek ∆V do V, oznaczamy literą θ
θ = ![]()
i nazywamy rozszerzeniem lub skróceniem objętościowym właściwym. Według prawa Hooke'a θ i ciśnienie na powierzchnię p są wielkościami proporcjonalnymi.
p ≈ θ
Zatem stosunek tych dwóch wielkości ![]()
jest stały. Jest on miarą wielkości nasyconej, modułem sprężystości objętościowej lub modułem ściśliwości. Moduł ściśliwości wyraża się w takich samych jednostkach jak ciśnienie i oznaczamy literą K.
![]()
, skąd p = - Kθ
Znak minus z faktu, że p jest wielkością dodatnią, a θ ujemną (gdyż przyrost ΔV jest ujemny).
odkształcenie postaciowe występuje wówczas, gdy na ciało działa ciśnienie
styczne np. sześcian o nieruchomej podstawie pod wpływem ciśnienie stycznego działającego na górną jego część odkształci się w równoległościan. Miarą odkształcenia jest, zatem ![]()
. Ponieważ kąt α jest bardzo mały można przyjąć: tgα ≈ α. Wysokość równoległościanu po odkształceniu w przybliżeniu jest równa wysokości sześcianu. Następuje, zatem tylko zmiana kształtu bez zmiany objętości. Zgodnie z prawem Hooke'a ciśnienie styczne ![]()
i odkształcenie są wielkościami proporcjonalnymi: ![]()
, zatem stosunek ![]()
jest stały i oznaczony literą G.
![]()
Stałą G wywierającą właściwości sprężyste materiału nazywa się modułem sprężystości postaciowej. Im większy jest moduł sprężystości postaciowej, tym bardziej trudniej jest zmienić kształt ciała. Ponieważ α jest liczbą bezwymiarową to moduł G ma wymiar ciśnienia.
Wydłużenie następuje wówczas, gdy na pręt o przekroju A i długości L0 działa siła rozciągająca F, na pręt działa wówczas ciągnienie:![]()
, pod wpływem, którego długość powiększy się o ΔL. Gdyby siła F była siłą ściskającą, długość pręta o tyleż by się zmniejszyła. Stosunek ![]()
jest miara wielkości i nazywa się wydłużeniem właściwym lub skróceniem właściwym, (gdy ΔL jest ujemne). Przy rozciąganiu pręta długość jego rośnie. Jednocześnie wymiary poprzeczne jego zmniejszają się. Według prawa Hooke'a ![]()
.
(σ jest zatem proporcjonalne do ε). Zatem stosunek tych dwóch wielkości jest stały. Jest on miarą własności sprężystych materiału wykonanego przy rozciąganiu. Oznacza się go literą E i nazywa modułem Younga:
![]()
, skąd ![]()
Ruch drgający - to ruch punktu materialnego, w którym siła działająca na ciało jest proporcjonalna do wychylenia x od położenia równowagi i przeciwnie skierowana do tego wychylenia:
Fs = -kx
k - stała proporcjonalności
Minus odpowiada przeciwnie zwrotowi siły względem wychylenia. Przykładem takiej siły jest siła wywołana przez sprężynę podlegającą prawu Hooke'a (wówczas jest stałą sprężystości). Zgodnie z drugą zasadą dynamiki Newtona.:
Fs = ma
ma = -kx/m
a = - ω2x
ω - częstość kołowa
Równanie to wyraża zależność między przyspieszeniem a i wychyleniem x. W związku z tym, że przyspieszenie jest drugą pochodną drogi przebytej przez ciało względem czasu t, można napisać równanie:
![]()
Jest to równanie ruchu kołowego, którego rozwiązaniem jest następująca zależność:
x = Asin(ωt + φ)
A - amplituda drgań harmonicznych
φ - przesunięcie fazy
Po obliczeniu pierwszej i drugiej pochodnej względem osi x, otrzymam wartość prędkości i przyspieszenia w rozpatrywanym ruchu:
![]()
![]()
Drgania tłumione - to drgania ciała, które odbywają się w ośrodku materialnym (gaz, ciecz), to wskutek występowania siły oporu ośrodka tzw. siły tłumionej, drgania zanikają. Nie zależnie od natury ośrodka siła tłumiąca Ft jest proporcjonalna do prędkości, jeśli prędkość ta jest niewielka.
![]()
Współczynnik proporcjonalności b nazywa się współczynnikiem oporu. Znak minus uwzględnia fakt, że siła Ft jest zawsze skierowana przeciwnie do kierunku ruchu.
Uwzględniając działanie siły tłumiącej można dla drgań tłumionych, zgodnie z trzecią zasadą Newtona napisać:
Fs + Ft = ma
![]()
Jest to różniczkowe równanie drgań tłumionych punktu materialnego. Rozwiązaniem tego równania jest funkcja:
x = A0e-βtcos(ω1t + φ)
![]()
- stała tłumienia
![]()
- pulsacja drgań tłumionych
Wskutek działania siły tłumiącej:
- amplituda drgań maleje z upływem czasy według zależności: A = A0e-βt
- pulsacja drgań jest mniejsza niż dla drgań swobodnych: ![]()
Wielkością charakteryzującą drgania tłumione jest tzw. logarytmiczny dekrement tłumienia. Jest to logarytm naturalny dwóch amplitud w chwilach t i t + T. Oznaczając logarytmiczny dekrement tłumienia literą δ piszemy:
II.CZĘŚĆ PRAKTYCZNA
1.)
Dokonuję pomiaru współczynnika sprężystości na podstawie prawa Hooke'a:

![]()
- odkształcenie
![]()
- moduł Younga
F2 - siła obciążająca
Fs - siła sprężystości
A - przekrój poprzeczny
Poprzez porównanie wzorów otrzymuję:

Wstawiam za wyrażenie stojące przy x literkę k i otrzymuję wzór na siłę zewnętrzną:
F2 = kx
W związku z tym, że siła sprężystości ma taką samą wartość jak siła obciążająca, lecz przeciwny zwrot możemy napisać:
Fs = - kx
Następnie przechodzę do czynności pomiarowych mających na celu
wyznaczenie masy poszczególnych obciążników, położenia równowagi oraz ich wydłużenia. Otrzymane wyniki przedstawiłem w tabeli nr.1
Tab. 1
L.p |
m0 [kg] |
m [kg] |
x0 [mm] |
x [cm] |
xn [cm] |
xn [m] |
F2n [N] |
1 |
0,2 |
0,0488 |
152 |
157,5 |
5,5 |
0,055 |
0,488 |
2 |
0,2 |
0,0507 |
152 |
162 |
10 |
0,1 |
0,507 |
3 |
0,2 |
0,0516 |
152 |
167,7 |
15,7 |
0,157 |
0,516 |
4 |
0,2 |
0,0518 |
152 |
174,4 |
22,4 |
0,224 |
0,518 |
5 |
0,2 |
0,050 |
152 |
181 |
29 |
0,29 |
0,5 |
n - numer obciążnika
Wyznaczam wydłużenie xn dla poszczególnych obciążników:
x1 = xn1 - x0 = 157,5 - 152 = 5,5 cm = 0,055 m
x2 = xn2 - x0 = 162 - 152 = 10 cm = 0,1 m
x3 = xn3 - x0 = 167,7 - 152 = 15,7 cm = 0,157 m
x4 = xn4 - x0 = 174,4 - 152 = 22,4 cm = 0,224 m
x5 = xn5 - x0 = 181 - 152 = 29 cm = 0,29 m
Wyznaczam siłę obciążającą F2n dla poszczególnych obciążników:
g = 9,81 m/s2 ≈ 10 m/s2
F21 = m1 · g = 0,0488 · 10 = 0,488 N
F22 = m2 · g = 0,0507 · 10 = 0,507 N
F23 = m3 · g = 0,0516 · 10 = 0,516 N
F24 = m4 · g = 0,0518 · 10 = 0,518 N
F25 = m5 · g = 0,050 · 10 = 0,5 N
Wyznaczam niepewności pomiarowe dla poszczególnych wartości:
∆n = ∆n0 = 100 mg = 0,0001 kg
m0 = (0,02 ![]()
0,0001) kg
m1 = (0,0488 ![]()
0,0001) kg
m2 = (0,0507 ![]()
0,0001) kg
m3 = (0,0516 ![]()
0,0001) kg
m4 = (0,0518 ![]()
0,000) kg
m5 = (0,05 ![]()
0,0001) kg
Wyznaczam niepewność dla wydłużenia xk:
xn = x - x0 ∆x0 = 1 mm = 0,001 m
xn= f(x,x0) ∆x = 1 mm = 0,001 m
∆xn = 
∆xn = ![]()
∆xn = 0,001 + 0,001 = 0,002 m
xn1 = (0,0055![]()
0,002) m
xn1 = (0,01![]()
0,002) m
xn1 = (0,015![]()
0,002) m
xn1 = (0,0224![]()
0,002) m
xn1 = (0,029![]()
0,002) m
Wyznaczam niepewność dla siły obciążającej F2:
F2 = m · g
F2 = f(m)
![]()
F2 = 10 · 0,0001 = 0,001 N
F21 = (0,488![]()
0,001) N
F22 = (0,507![]()
0,001) N
F23 = (0,516![]()
0,001) N
F24 = (0,518![]()
0,001) N
F25 = (0,5![]()
0,001) N
Wyznaczam współczynnik k metodą regresji liniowej, korzystając z zależności x od przyłożonej siły obciążającej F2:
F2 = - kx
![]()
y - ax + b
Do tego celu posłużę się specjalnie zaprojektowaną tabelą nr. 2
Tab. 2
L.p |
xi F2[N] |
yi xn[m] |
xiyi |
xi2 |
yi2 |
1 |
0,488 |
0,0055 |
0,002684 |
0,238144 |
0,00003025 |
2 |
0,507 |
0,01 |
0,00507 |
0,257049 |
0,0001 |
3 |
0,516 |
0,0157 |
0,0079599 |
0,266256 |
0,00024649 |
4 |
0,518 |
0,0224 |
0,0116032 |
0,268324 |
0,00050176 |
5 |
0,5 |
0,029 |
0,0145 |
0,25 |
0,000841 |
|
2,529 |
0,0826 |
0,04182 |
1,27977 |
0,00172 |
W celu wyznaczenia współczynnika sprężystości k, muszę wyznaczyć współczynnik a metodą regresji liniowej:
![]()
Wyznaczam współczynniki a i b:

Wyznaczam współczynnik k:
![]()
Aby wyznaczyć niepewność dla współczynnika sprężystości k, trzeba wyznaczyć niepewność współczynnika a metodą regresji liniowej:
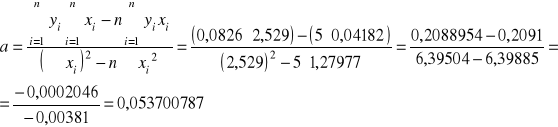
Wyznaczam niepewność dla współczynnika a:
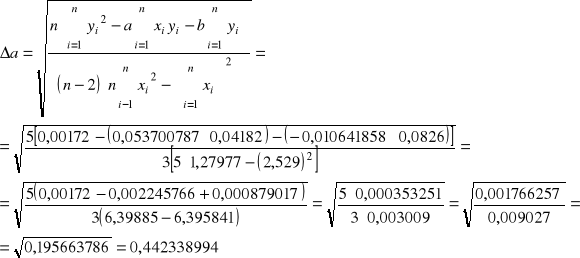
![]()
![]()
![]()
Wyznaczam niepewność dla współczynnika sprężystości k:
![]()
![]()
![]()
![]()
![]()
![]()
Wykonuję obliczenia, które są niezbędne do wykonania zależności wydłużenia x od przyłożonej siły F2
Wyznaczam niepewność dla współczynnika b:

![]()
![]()
![]()
Wyznaczam równanie prostej teoretycznej:
y = ax + b
y = 0,053700787x -0,010641858
Wyznaczam przykładowe punkty należące do prostej teoretycznej:
x = F2
dla x = 0,488 ; (0,0488 ; - 0,00540066)
dla x = 0,0516 ; (0,516 ; - 0,005250298)
dla x = 0,050 ; (0,50 ; - 0,00533622)
Wyznaczam równania prostych ograniczających, które wyznaczają niepewność prostej teoretycznej:
y1 = (a + ∆a)x + b + ∆b y2 = (a - ∆a)x + b - ∆b
y1 = 0,496039781 x + 0,009167081 y2 = -0,388638207x +0,001474777
Wyznaczam przykładowe punkty należące do prostych ograniczających:
y1:
dla x = 0,0488 y1 = 0,033373822 (0,0488 ; 0,033373822)
dla x = 0,0516 y1 = 0,034762733 (0,0516 ; 0,034762733)
dla x = 0,0500 y1 = 0,03396907 (0,0500 ; 0,03396907)
y2:
dla x = 0,0488 y2 = - 0,017490767 (0,0488 ; - 0,017490767)
dla x = 0,0516 y2 = - 0,018578954 (0,0516 ; - 0,018578954)
dla x = 0,0500 y2 = - 0,017957133 (0,0500 ; - 0,017957133)
2.)
Wyznaczam logarytmiczny dekrement tłumienia δ i stałej tłumienia β metodą
drgań mechanicznych:
Wyznaczanie stałej tłumienia β, a tym samym współczynnika tłumienia (b = 2βn), odbywa się na podstawie związku pomiędzy logarytmicznym dekrementem tłumienia δ, a stałą tłumienia β oraz okresu drgań układu drgającego T.

Zanotowane podczas przeprowadzenia doświadczenia wyniki zamieściłem w tabeli nr. 3
Tab. 3
L.p |
x0 [cm] |
x0 - 10 [cm] |
x1 [cm] |
x2 [cm] |
x3 [cm] |
x4 [cm] |
4T [s] |
T [s] |
1 |
159,5 |
149,5 |
164,5 |
154 |
160,5 |
166,6 |
3,3 |
0,825 |
2 |
163 |
153 |
172 |
158 |
162 |
164 |
2,9 |
0,725 |
3 |
169,5 |
159,5 |
175 |
164 |
171 |
166 |
3,2 |
0,8 |
4 |
177,5 |
167,5 |
182,1 |
172,4 |
179,1 |
174,3 |
4,3 |
1,075 |
5 |
182,3 |
172,3 |
186,2 |
172,1 |
176,4 |
174,3 |
5,1 |
1,275 |
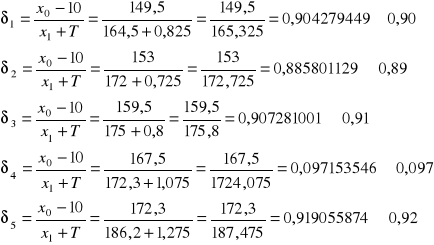
Wyznaczam logarytmiczny dekrement tłumienia δ, biorąc pod uwagę fakt, że jego wartość jest równa logarytmowi naturalnemu stosunku dwóch kolejno następujących po sobie amplitud:
![]()
xn - wychylenie w chwili t
xn+1 - kolejne wychylenie w chwili t + T
Wyznaczam niepewność pomiarową dla logarytmicznego dekrementu tłumienia δ:
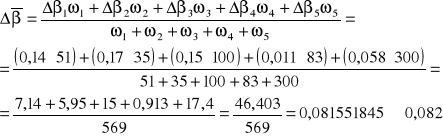
W związku z tym, że niepewności logarytmicznego dekrementu tłumienia są różne obliczam jego średnią ważoną:

Obliczam niepewność średniej ważonej:

![]()
![]()
![]()
Obliczam stałą tłumienia ze wzoru:
![]()
Obliczam niepewność dla okresu T:

Wyznaczam niepewność dla stałej tłumienia β:
![]()

W związku z powyższym, że niepewności stałej tłumienia są różne, obliczam ich średnią ważoną:
![]()
Obliczam niepewność średniej ważonej:
![]()
![]()
s
![]()
Wyznaczam współczynnik tłumienia b, ze wzoru:
b = 2βmc
b1 = 2β1(m0 + m1) = 2 · 1,1(0,02+0,0488) = 2,2 · 0,00688 = 0,015136 ≈ 0,015![]()
b2 = 2β2(m0 + m1 + m2) = 2 · 1,2(0,02 + 0,0488 + 0,0507) = 2,4 · 0,1195 = 0,2868 ≈ 0,29![]()
b3 = 2β3(m0 + m1 + m2 + m3) = 2 · 1,1(0,02 + 0,0488 + 0,0507 + 0,0516) = 2,2 · 0,1711 = = 0,37642 ≈ 0,38![]()
b4 = 2β4(m0 + m1 + m2 + m3 + m4) = 2 · 0,011(0,02 + 0,0488 + 0,0507 + 0,0516 + 0,0518) =
= 0,022 · 0,1713 = 0,0037686 ≈ 0,0038![]()
b5 = 2β5(m0 + m1 + m2 + m3 + m4 + m5) = 2 · 0,058(0,02 + 0,0488 + 0,0507 + 0,0516 +
+ 0,0518 + 0,050) = 0,116 · 0,2213 = 0,0256708 ≈ 0,026![]()
Wyznaczam niepewność pomiarową dla masy mc = m0 + m:
![]()
![]()
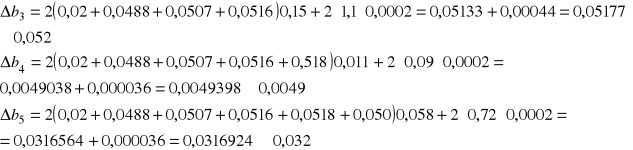
Wyznaczam niepewność pomiarową dla współczynnika tłumienia b dla poszczególnych obciążników:
b = 2βmc

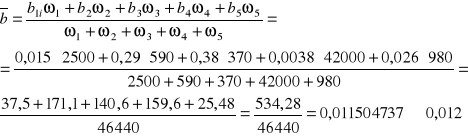
W związku z tym, że niepewności współczynnika b są różne, obliczam jego średnią ważoną:
![]()

Obliczam średnią niepewność średniej ważonej:
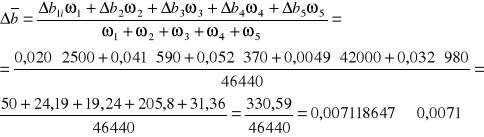
![]()
![]()
![]()
Wnioski:
Celem doświadczenia było wyznaczanie współczynnika sprężystości oraz stałej tłumienia drgań mechanicznych. Wyniki doświadczenia, które przeprowadziłem są obarczone błędem spowodowanym niedokładnością przyrządów użytych w doświadczeniu.
1
Wyszukiwarka
Podobne podstrony:
Sprawozdanie M7w, Studia, Pracownie, I pracownia
Sprawozdanie 49, Studia, Pracownie, I pracownia, 49 Charakterystyka tranzystora, Waldek
Sprawozdanie 59, Studia, Pracownie, I pracownia, 59 Rezonans elektromagnetyczny, Waldek
Sprawozdanie 60, Studia, Pracownie, I pracownia, 60 Wyznaczanie współczynnika załamania światła ciał
Sprawozdanie 70, Studia, Pracownie, I pracownia, 70 Wyznaczanie stałej Plancka z charakterystyk opty
Sprawozdanie 55, Studia, Pracownie, I pracownia, 55 Wyznaczanie składowej poziomej magnetyzmu ziemi,
Sprawozdanie C7w, Studia, Pracownie, I pracownia
sprawozdanie e4, Studia, Pracownie, I pracownia
201 sprawozdanie-fizyka, Studia Politechnika Poznańska, Semestr II, I pracownia fizyczna, LABORKI WS
pomoc1, Studia, Pracownie, I pracownia, moje sprawozdania
Badanie wahadła skrętnego, Studia, Pracownie, I pracownia, 7 Badanie drgań wahadła skrętnego {torsyj
24 - oddane 21.04.2010, Studia, Pracownie, I pracownia, 24 Wyznaczenie mechanicznego równoważnika ci
Wstęp 59, Studia, Pracownie, I pracownia, 59 Rezonans elektromagnetyczny, Waldek
m5 NP, Studia, Pracownie, I pracownia
Sprawozdanie03, Politechnika, Statystyka, pracownia, Od pawła, paweł
OSCYLOSK, Studia, Pracownie, I pracownia, 51 Pomiary oscyloskopowe, Ludwikowski
Wstęp teoretyczny 32, Studia, Pracownie, I pracownia
więcej podobnych podstron