Temat ćwiczenia:
Badanie symulacyjnych układów regulacji - w dziedzinie czasu.
Cel ćwiczenia:
Zapoznanie się ze sposobami realizacji układów automatycznej regulacji w postaci bloków programu symulacyjnego, analiza badanego układu, dobór właściwego regulatora.
Narzędzia pomiarowe:
W ćwiczeniu wykorzystano pakiet symulacyjny Matlab we współpracy z komputerem PC i drukarką.
Opis ćwiczenia:
Należało zaprojektować układ automatycznej regulacji - regulator dwustanowy z przekaźnikiem i wzmacniaczami, służący do regulacji temperatury w pewnym procesie przemysłowym.
Dane zadania:
ϑZ = 92°C - temperatura zadana
ϑo = +25°C - temperatura otoczenia
az =
- napięcie wejściowe
Grzejnik:
UN = 220V
ϑN = 440°C
T = 160s
Czujnik temperatury (termopara): miedź - konstantan
Układ zaprojektowany:
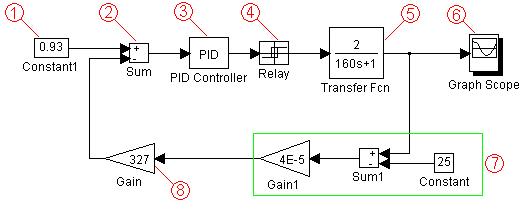
Opis układu:
wejściowe napięcie az odniesione do temperatury zadanej 93°C
węzeł sumacyjny
regulator PID
przekaźnik
obiekt pierwszego rzędu symulujący zastosowany grzejnik
wirtualny oscyloskop rejestrujący
układ symulujący termoparę
Napięcie wyjściowe z termopary jest proporcjonalne do różnicy temperatur (zadanej i otoczenia). Na wyjściu wzmacniacza Gain1 otrzymujemy napięcie proporcjonalne do temperatury
. W dalszym torze sprzężenia zwrotnego w celu wzmocnienia sygnału trzeba zastosować wzmacniacz Gain, którego współczynnik wzmocnienia wyznacza się na podstawie obliczeń.
wzmacniacz sygnału
Przebieg symulacji:
Dobory nastaw parametrów układu |
|||||
Nr wykresu: |
Regulator |
Wzmacniacz |
Uwagi: |
||
|
P |
I |
D |
Gain |
- |
|
|||||
1 |
6 |
0 |
0 |
327 |
Optymalne nastawy |
2 |
6 |
0 |
0 |
450 |
Ocena wpływu nastaw wzmacniacza Gain |
3 |
6 |
0 |
0 |
1000 |
|
4 |
6 |
0 |
0 |
100 |
|
5 |
1 |
0 |
0 |
100 |
Ocena wpływu nastaw członu proporcjonalnego regulatora PID |
6 |
100 |
0 |
0 |
100 |
|
7 |
1 |
0 |
0 |
327 |
|
8 |
100 |
0 |
0 |
327 |
|
9 |
6 |
1 |
1 |
327 |
Ocena wpływu członu całkującego i różniczkującego regulatora PID |
10 |
6 |
0,1 |
0,1 |
327 |
|
11 |
6 |
10 |
0,1 |
327 |
|
12 |
6 |
0,5 |
0,5 |
327 |
|
Podczas wszystkich pomiarów ustawienia przekaźnika były następujące:
Input for on: 0,3
Input for off: 0,1
Output when on: 220
Output when off: 0
Symulację przeprowadzono wykorzystując metodę: Runge - Kutta 3Wnioski:
Po przeprowadzeniu ćwiczenia i wykreśleniu wymaganych charakterystyk można wysunąć następujące wnioski.
W celu zapewnienia regulacji procesu utrzymywania stałej temperatury zaproponowano układ pokazany powyżej. Podczas analizy układu automatycznej regulacji przeanalizowano kilka przypadków ustawień parametrów zastosowanych elementów, wyniki przedstawiono w powyższej tabeli.
Optymalne działanie układu uzyskano dla regulatora PID z aktywnym członem proporcjonalnym, natomiast człon różniczkujący i całkujący był nieaktywny. Wzmocnienie wzmacniacza Gain w pętli sprzężenia zwrotnego zmniejszono nieco w stosunku do wartości wyznaczonej teoretycznie.
Badając wpływ wzmocnienia Gain przy stałych parametrach regulatora PID sporządzono wykresy nr 2, 3, 4. Można zauważyć, że wzrost wzmocnienia powoduje obniżenie wartości ustalonej, trzykrotne zmniejszenie wzmocnienia powoduje ponad 2,5 krotny wzrost wartości ustalonej.
W kolejnych punktach (5-8) prześledzono wpływ części proporcjonalnej regulatora PID na układ. Zwiększenie członu P powoduje prawie całkowity zanik oscylacji wprowadzanych przez przekaźnik, natomiast zmniejszenie tej wartości powoduje istotne zwiększenie oscylacji.
Dokonując oceny wpływu członu różniczkującego i całkującego regulatora PID (wykresy: 9-12) można ogólnie powiedzieć, iż uaktywnienie tych członów powoduje pogorszenie jakości regulacji. W przypadku 9 i 11 pojawiają się istotne przeregulowania, które mają charakter zanikający co świadczy o zachowanej stabilności układu.
Wyszukiwarka
Podobne podstrony:
CZAS WOLNY(1)
Czas w kulturze ped czasu wolnego
czas
czas pracy maszynistówa bezpieczenstwo kolejowe KTS
Czas przyszły
Czas nie istnieje, to iluzja – twierdzą (niektórzy) fizycy cz 2
Gately, Ed Cena i Czas zarys metod analizy technicznej
Nadszedł czas, by Michnik nauczył się żyć w demokracji
Dla wyznawcow Chrystusa nastaje coraz trudniejszy czas, ► Dokumenty
Czas wolny, pedagogika
Lekcja 5 Czas Past Simple, lekcje
Umowa na czas wykonania określonej pracy, administracja, prawo pracy, Semestr II
Przedświąteczny rachunek sumienia, Bałagan - czas posprzątać i poukładać
Blessing in disguise(1), Fanfiction, Blessing in disguise zawieszony na czas nie określony, Doc
socjologia - czas w społeczeństwie, Socjologia ogólna
Franz Stanzel - Sytuacja narracyjna i epicki czas przeszły, Kulturoznawstwo, literaturoznawstwo
Podziękowanie dla siostry katechetki od dzieci pierwszokomunijnych, Bałagan - czas posprzątać i pouk
więcej podobnych podstron