AGH Laboratorium Teorii Sterowania |
Grupa 8
|
||||
wydział EAIiE |
rok akademicki 2001/2002 |
rok studiów II |
|
||
Temat : Układ sterowania prędkością obrotową silnika obcowzbudnego prądu stałego.
|
|||||
data wykonania 20.03.2002 |
data zaliczenia 27.03.2002 |
ocena
|
|||
1. Wstęp
Celem ćwiczenia jest zapoznanie się z budową i zasadą działania układu do sterowania prędkością obrotową silnika prądu stałego. Szczególną uwagę przykłada się do analitycznego opisu działania układu biorąc pod uwagę aspekty dotyczące automatyki i sterowania tzn. na zależności przyczynowo skutkowe pomiędzy najważniejszymi wielkościami fizycznymi opisujących obiekt. W kategoriach automatyki opisywana jest również ogólna budowa, czyli struktura układu.
Rozważany układ pod względem struktury może być określony jako :
otwarty układ sterowania,
zamkniętym układem sterowania - układ automatycznej regulacji (UAR).
2) Schemat i opis działania układu :
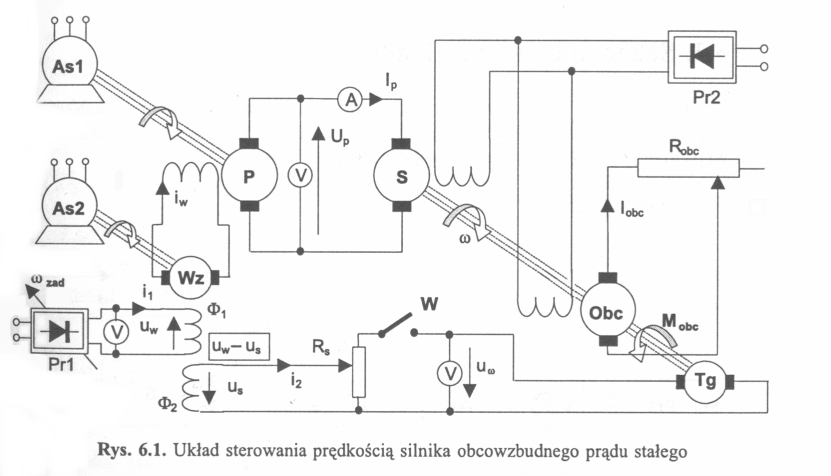
Schemat ideowy połączeń przedstawiono powyżej.
Przedmiotem regulacji jest tutaj silnik (S), który sterowany jest prądem prądnicy (P). Prądnica (P) natomiast, napędzana jest przez silnik indukcyjny (As1) i zasilana przez wzbudnicę (Wz), która w rzeczywistości jest zwykłą prądnicą z tym że wzbudzaną z dwóch niezależnych uzwojeń. Gdy wyłącznik W jest otwarty układ jest układem otwartym i prądnica (Wz) wzbudzana jest jedynie strumieniem pochodzącym od napięcia uw, którego wartość regulujemy za pomocą prostownika (Pr1). Gdy zamkniemy wyłącznik W w drugim uzwojeniu indukuje się strumień pochodzący od napięcia us i wtedy prądnica (Wz) wzbudzana jest sumą algebraiczną obydwu strumieni (zamknięty układ sterowania).
Ponieważ działanie układu otwartego opiera się na następującym procesie : zmiana uw → zmiana strumienia φ1 → zmiana prądu iw → zmiana napięcia up silnika → zmiana prędkości obrotowej silnika (wszystko dzieje się w wyniku oddziaływań prądów i pół magnetycznych wzbudnicy (Wz), prądnicy (P) i silnika (S). Widzimy więc, że prędkość obrotowa silnika jest proporcjonalna do napięcia uw, a więc zadając określoną jego wartość wymuszamy określoną prędkość obrotową.
W układzie zamkniętym prędkość ta jest zależna od sumy algebraicznej napięć uw i us a wzbudnica (Wz) pełni w tym układzie funkcję sumatora tych sygnałów. Układ rezystorów służy do regulacji prądu obciążenia, (które można kontrolować obserwując wartość prądu ip silnika. Prądnica (Obc) pełni w układzie rolę obciążenia mechanicznego dla silnika. Prądnica tachometryczna (Tg) umieszczona jest w torze sprzężenia i odpowiada za wartość napięcia us (napięcie te jest proporcjonalne do obrotów przekazywanych do tachometru przez połączenie mechaniczne od silnika). Rezystor Rs służy do płynnej regulacji wartości sprzężenia (możemy je regulować od zera - układ zamknięty, do ustalonej wartości - układ zamknięty). Układ będzie spełniał swoje zadanie (stałej wartości prędkości kątowej) jedynie w przypadku zastosowania ujemnego sprzężenia zwrotnego. Zatem tak należy podłączyć zaciski uzwojeń wzbudzających wzbudnicę (Wz) aby zachodziła zależność: uw - us.
3) Schemat Blokowy Układu
Zadajnik (Pr1) - Napięcie nastawcze uw prędkość obrotową silnika. Jest członem proporcjonalnym, które można przedstawić jako
uw=k1 ωzad
Gdzie : k - stała zadajnika
Dzielnik napięcia (Rs) i Tachoprądnica (Tg) - człony o bezinercyjnym działaniu proporcjonalnym o ogólnym zapisie us=k2k3 ω
Współczynniki k2 i k3 określają wzmocnienie toru sprzężenia zwrotnego, a tym samym wielkość sprzężenia zwrotnego.
Blok (Wz) - wzbudnica
W każdym z dwóch uzwojeń wzbudzenia prądnicy - wzbudnicy Wz płynie prąd, powstaje więc strumień magnetyczny. Wypadkowy strumień indukuje w wirującym tworniku (As2) napięcie, które zasila uzwojenie wzbudzenia prądnicy (P). W uzwojeniu tym płynie prąd iw .
Przyjmując, że strumienie magnetyczne uzwojeń wzbudzenia φ1 φ2 są proporcjonalne do odpowiednich prądów i1 i2 ,oznacza linearyzację charakterystyki magnesowania. Wypadkowy strumień magnetyczny φw=φ1+φ2 jest przyczyną indukowania się w obwodach twornika wzbudnicy (Wz) siły elektromotorycznej. Pod jej wpływem w obwodzie prądnicy (P) płynie prąd iw, który traktujemy jako sygnał wyjściowy (Wz).
Prądnica (P)
Prądnicę sterującą traktujemy jako liniowy człon proporcjonalny przetwarzający prąd iw na Up (napięcie na zaciskach prądnicy)
Up=kp iw
Silnik (S)
Prędkość obrotową silnika ω i pobierany ze źródła zasilającego prąd Ip potraktowano jako sygnały wyjściowe. Jako wymuszenie przyjęto napięcie zasilające Up i moment obciążenia Mobc . Z tego wynika, że silnik jest widziany jako obiekt o 2 sygnałach wejściowych i 2 wyjściowych.
Można to zapisać jako :
gdzie:
Rz, Lz - przeniesiona do silnika zastępcza rezystancja i indukcyjność obwodu prądnicy
Es , M.s - siła elektromotoryczna i moment elektryczny silnika
Obciążenie mechaniczne silnika - prądnica (Obc)
Moment mechaniczny, którym obciążony jest silnik (S) wytwarzany przez obcowzbudną prądnice prądu stałego. Moment ten jest proporcjonalny do prądu Iobc płynącego w obwodzie prądnicy.
gdzie:
,
więc :
k4,k5 - stałe
Eobc - napięcie na zaciskach prądnicy obciążającej
Robc - rezystancja obciążenia
Układ obciążenia jest układem nieliniwym.
Dane pomiarowe.
Charakterystyka pomiarowa zależności ω(uω) dla silnika nie obciążonego
Układ otwarty :
ω
|
uw
|
10 |
0 |
60 |
0,5 |
200 |
1 |
420 |
1,5 |
560 |
2 |
800 |
3 |
Układ zamknięty :
ω
|
uw
|
0 |
0,6 |
200 |
2 |
360 |
3 |
460 |
4 |
700 |
6 |
880 |
8 |
Wnioski :
Można zauważyć, że przy układzie otwartym (bez sprzężenia zwrotnego) wał silnika obraca się dla napięcia wymuszającego uω = 0. Są to tzw. szczątki magnetyczne w układzie napędowym. Charakterystyka jest bardziej stroma, silnik uzyskuje szybciej maksymalna (badaną) prędkość przy niższym napięciu sterującym.
Charakterystyka dla układu ze sprzężeniem zwrotnym wolniej narasta, maksymalna prędkość jest uzyskiwana przy dużo wyższym napięciu sterowania.
Na charakterystyce dynamicznej odczytanej na oscyloskopie widzimy, że czas rozruchu silnika wynosi około 4 sekund.
Charakterystyka pomiarowa zależności prędkości obrotowej w funkcji obciążenia Mobc.
Można zauważyć, że obciążenie silnika w stanie ustalonym jest proporcjonalne do prądu silnika.
więc wykonam charakterystykę ω(IP).
Układ otwarty :
ω
|
IP
|
880 |
1,5 |
720 |
5,5 |
600 |
10 |
440 |
16 |
280 |
21,5 |
Układ zamknięty :
ω
|
IP
|
360 |
6 |
680 |
11 |
|
15 |
Wnioski :
Na podstawie przedstawionych powyżej charakterystyk można zauważyć, że układzie otwartym zwiększając Ip - obciążenie, prędkość obrotowa silnika maleje. Układ sterowania nie jest w stanie utrzymać zdanej prędkości.
Charakterystyka układu ze sprzężeniem zwrotnym jest narastająca. Świadczy to o tym, że pomimo zwiększania obciążenia silnika, układ regulacji stara się przywrócić zadaną wcześniej prędkość obrotową silnika. Widoczna jest tzw. samoregulacja układu.
Jeżeli chodzi o własności dynamiczne układu zamkniętego, to czas odpowiedzi silnika na zadany skok jednostkowy wynosi około 2 sekund (odczytany z wykresu na oscyloskopie). Stopniem sprzężenia można regulować powstałe przeregulowania (oscylacje) przy dochodzeniu do stanu ustalonego.
1
Wyszukiwarka
Podobne podstrony:
silniki prądu stałego
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
04 Zabezpieczenia silnikówid 5252 ppt
SILNIKI GRAFICZNE W GRACH KOMPUTEROWYCH
SILNIKI
Prezentacja OP silniki
silnik pradu stalego
Silnik rotacyjny, a silnik tłokowy
A3 Silnik indukcyjny pierscieniowy program
KODY USTEREK EOBD SILNIK ES9J4S (XFX)
Lokalizacja elementów silnika 1 4i TU3MC
Model silnika pradu stalego id Nieznany
bmw E38 E39 rozladowany akumulator halas z komory silnika
Opis silnikow krokowych id 3370 Nieznany
Napędy i silniki elektryczne
Badanie silnika pradu stałego
Przegląd układu tłokowo – korbowego silnika MAN B&W – L 2330 H
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
5 Montaż i demontaż rączki pokrywy silnika
2006 03 Sterowanie PWM silnikami DC większej mocy
więcej podobnych podstron