
Tomasz Zarębski
Politechnika Szczecińska
Instytut Elektrotechniki
ul. Sikorskiego 37
70-313 Szczecin
SPOSÓB REGULACJI GŁĘBINOWYCH SILNIKÓW INDUKCYJNYCH
ZASILANYCH Z ALTERNATYWNYCH ŹRÓDEŁ ENERGII
1. Wprowadzenie
Silniki głębinowe mają szerokie zastosowanie w układach napędowych pomp
odśrodkowych. Układy takie są stosowane przede wszystkim w przemyśle wydobywczym
zarówno do osuszania wyrobisk górniczych z wód gruntowych (szyby w kopalniach węgla
kamiennego, odkrywki węgla brunatnego) jak i do wydobywania ropy naftowej [3]. Spotyka
się je również w studniach głębinowych oraz w miejskich zakładach wodociągowych.
Zdarzają się również bardzo specyficzne zastosowania tych silników, jak na przykład
wydobycie płynnej siarki, przepompownie różnego rodzaju zanieczyszczeń itp.
Wynika stąd, że silniki głębinowe są stosowane przede wszystkim do wydobycia
wody oraz ropy naftowej. Ze względu na specyfikę występowania złóż obu tych surowców
ich konstrukcja jest różna.
Silniki pomp ropy naftowej pracują w ekstremalnych warunkach. Tak np. przy
wydobywaniu ropy naftowej spod dna morskiego na głębokości 2000 m poddawane są one
ciśnieniu cieczy w odwiercie dochodzącemu do 20 MPa. Pompowana ropa naftowa często ma
właściwości ścierne wywołane zawartością piasku z dna wokół pokładu. Ponadto, w
pompowanej cieczy mogą się znajdować wtrącenia stałe, które mogą spowodować nagły
wzrost obciążenia silnika. Natomiast wtrącenia gazowe mogą być przyczyną nagłego
zmniejszenia obciążenia.
Silniki napędowe pomp wodnych pracują w nieco lepszych warunkach, a ponadto na
mniejszych głębokościach. W przypadku zastosowania takich napędów w studniach

głębinowych wymagana jest regulacja ich wydatku. W pompowanej wodzie, zwłaszcza w
przypadku osuszania wyrobisk górniczych, również mogą znajdować się różne zawiesiny,
części stałe, wtrącenia gazowe oraz substancje chemicznie aktywne.
Silniki tego typu, ze względu na możliwe zastosowania, mogą pracować w miejscach
odległych od energetyki zawodowej. Takie sytuacje mają najczęściej miejsce w przypadku
indywidualnych użytkowników posiadających własne niekonwencjonalne elektrownie,
baterie słoneczne lub elektrownie wiatrowe, o niewielkich mocach. Jak powszechnie
wiadomo, najcięższym stanem pracy silnika indukcyjnego jest jego rozruch. Dlatego w takich
przypadkach należy tak dobrać układ sterujący jego pracą, aby przy ograniczonej mocy źródła
zasilania możliwy był jego rozruch.
Silniki głębinowe pracują z reguły w pionowych odwiertach. Ze względu na pracę na
dużych głębokościach w szybach o średnicy niewiele większej od średnicy silnika. Dla
uzyskania odpowiedniej mocy silnika należy zwiększyć jego długość. Zasilanie odbywa się
poprzez odwiert. Również poprzez odwiert doprowadza się przewody stanowiące kanały
informacyjne o stanie pracy silnika.
Silniki z długim wałem są podatne na powstawanie drgań skrętnych oraz ugięcia. Co
może być przyczyną występowania zjawiska tarcia wału o stojan [1].
Warunki pracy silników głębinowych napędzających pompy oraz specyficzna ich
konstrukcja stwarzają szereg ograniczeń, które należy uwzględnić przy rozpatrywaniu
zagadnień rozruchu. Z ograniczeń tych należy wymienić:
• niekontrolowane pulsacje momentu obciążenia, które deformują teoretyczną
charakterystykę mechaniczną pompy,
• czas rozruchu jest uwarunkowany momentem bezwładności układu, tłumieniem
wibracji oraz obciążeniem; tłumienie wibracji w pompie zależy od cech pompowanej
cieczy,
• trwania rozruchu powinien być możliwie krótki, by zapewnić szybkie przechodzenie
przez prędkość odpowiadającą rezonansowi mechanicznemu układu silnik - pompa,
• w skrajnym przypadku przy bardzo trudnym rozruchu powinna istnieć możliwość
forsowania napięcia w celu zwiększenia momentu rozruchowego,
Ostatnie ograniczenie dotyczy rozruchu silników po dłuższych postojach. Podczas
rozruchu może pojawić się dodatkowy moment oporowy wynikający z działania cieczy, w
której jest zanurzony układ silnik – pompa. W tym przypadku dla dokonania rozruchu
niezbędne jest forsowanie napięcia.

2. Regulacja rozruchu silników pomp głębinowych
Najtrudniejszą sprawą podczas rozruchu jest przejście przez prędkość rezonansu
mechanicznego. Z tego względu należy tak projektować układ rozruchowy, aby przejście
przez tę prędkość odbywało się możliwie najkrócej. Ponadto znaczny prąd rozruchowy jest
przyczyną dużych obciążeń cieplnych, które mogą w dużym stopniu obniżyć trwałość silnika.
W celu zminimalizowania tych obciążeń celowe jest przeprowadzanie rozruchu przy
stałym przyspieszeniu. Ponieważ w czasie trwania rozruchu zawsze występują pulsacje
momentu obciążenia, co powoduje, że wartość chwilowa przyspieszenia zmienia się, można
mówić tylko o zachowaniu warunku średniej wartości przyspieszenia.
Jakość rozruchu w dużej mierze zależy od przyjętego algorytmu sterowania układem
rozruchowym. Biorąc jednak pod uwagę aktualne możliwości sterowania należy szukać
rozwiązań kompromisowych. Muszą one z jednej strony spełnić sprzeczne wymagania
dotyczące odpowiedniej regulacji momentu silnika, a z drugiej – ograniczenia prądu
rozruchowego. Powstaje więc zagadnienie dotyczące wyboru kryteriów przy opracowaniu
algorytmu sterowania rozruchem, przy równoczesnym uwzględnieniu ograniczonej z natury
ilości kanałów informacyjnych.
Z powyższego wynika, że dla uwzględnienia wymienionych warunków rozruchu
należy:
• utrzymywać stałą średnią wartość przyśpieszenia poprzez odpowiednią regulację
momentu maksymalnego,
• ograniczyć nagrzewanie silnika.
3. Równoczesna regulacja napięcia i częstotliwości
Przy rozpatrywaniu rozruchu spełniającego wyżej wymienione warunki zakładamy, że
istnieje możliwość regulacji częstotliwości oraz napięcia zasilającego silnik. Przez zmianę
częstotliwości możemy wpływać na wartość poślizgu krytycznego.
Jako czas rozruchu
τ
r
przyjmujemy czas liczony od początku rozruchu (s = 1) do
chwili osiągnięcia przez silnik poślizgu krytycznego (s = s
k
). Przedział ten (0
< τ < τ
r
)
stanowi 90
÷ 95 % całkowitego czasu do osiągnięcia przez układ silnik-pompa prędkości
ustalonej. W czasie 0 -
τ
r
występują największe przeciążenia prądowe.
W związku z określonym wyżej czasem rozruchu τ
r
możemy opracować taki algorytm
zmiany częstotliwości f(τ) w przedziale 0 -
τ
r
, aby silnik rozwijał moment maksymalny.
Wartość tego momentu wynika z założonego przyspieszenia. Zależy ono od rodzaju silnika,
głębokości na której ma pracować i innych czynników decydujących p warunkach jego pracy.
Wymaganą wartość momentu uzyskuje się poprzez regulacje napięcia zasilającego.
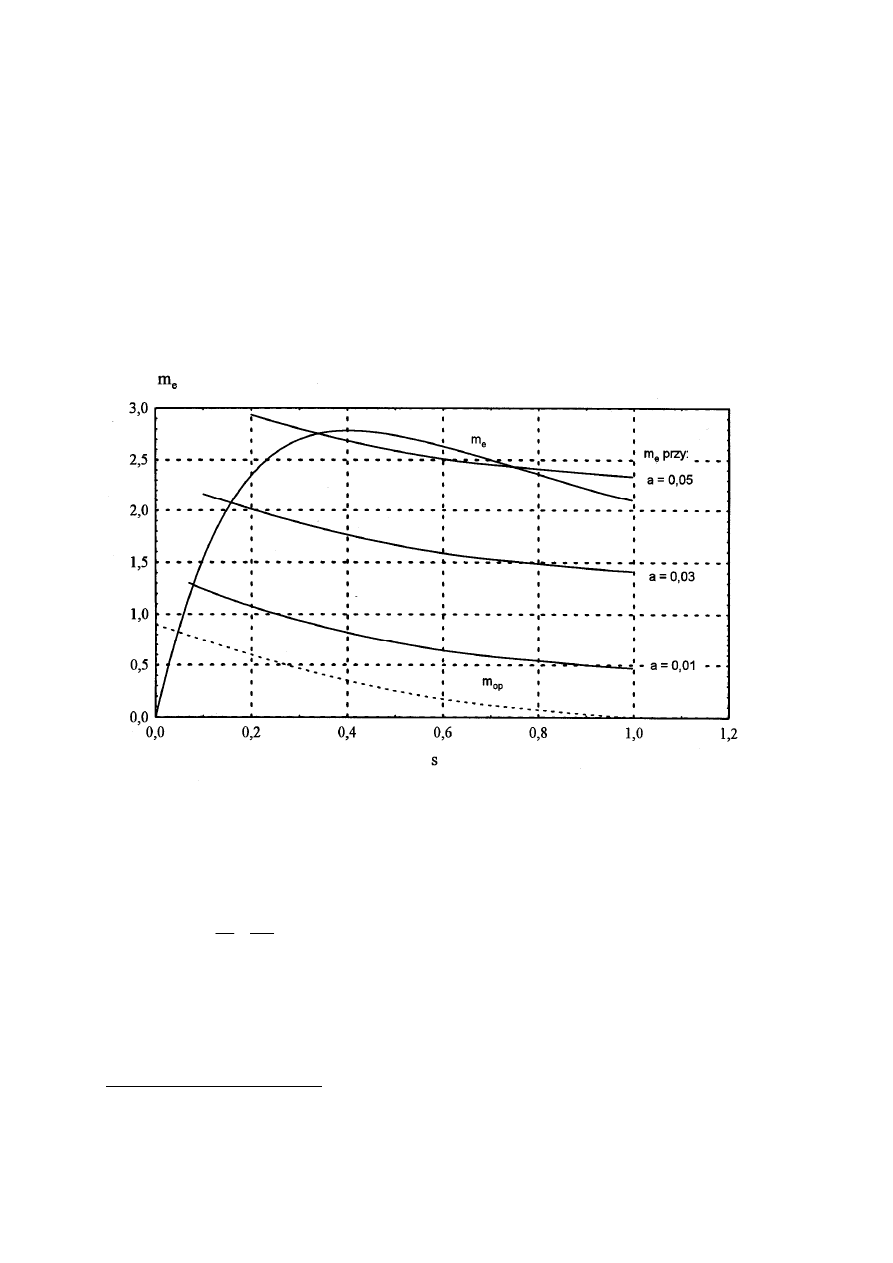
Na rysunku 1 przedstawiono obliczone charakterystyki m = f(s) silnika
uwzględniające powyższe warunki. W tym przypadku przyspieszenie 0,05 odpowiada
praktycznie rozruchowi bezpośredniemu.
Rys. 1. Przykładowy przebieg teoretycznych (1) charakterystyk momentu silnika i momentu oporow-
ego przy różnych wartościach założonego względnego przyspieszenia (a = 0,01; 0,03 i 0,05)
Ruch układu silnik-pompa w wartościach względnych opisuje zależność (1):
)
m
m
(
H
1
d
ds
e
op
j
−
=
τ
(1)
1
Obliczenia przeprowadzono dla typowego silnika głębinowego o następujących danych
znamionowych: typ SG-Me 18/33; P
n
=33 kW; U
n
=380V; I
n
=75,5 A; n
n
=2860 obr/min;
cosφ
n
=0,81; η
n
=0,82; I
r
/I
n
= 5,8; M
r
/M
n
= 2,2.
gdzie:
0
0
s
ω
ω
ω
−
=
- poślizg ;
pM
J
H
2
0
j
ω
=
- stała bezwładności mas wirujących, ω
0
– prędkość
synchroniczna,
0
n
n
p
I
U
3
M
ω
=
– moment odniesienia, p – liczba par biegunów, m
e
- moment
elektromagnetyczny, m
op
- moment oporowy.
Moment oporowy m
op
jest w przybliżeniu proporcjonalny do kwadratu prędkości wału
ω. Zastępując prędkość przez poślizg otrzymujemy m
op
=k(1-s)
2
, (gdzie k - współczynnik
zależny od charakterystyki pompy).
Moment elektromagnetyczny w jednostkach względnych jest równy:
]
x
)
C
s
r
r
[(
C
s
r
u
m
2
2
k
2
f
2
'
1
f
2
2
e
α
α
+
⋅
+
⋅
⋅
=
(2)
gdzie: u – wartość względna napięcia, C = C
a
+j C
r
- współczynnik zespolony korygujący
uproszczenie schematu zastępczego [2],
n
f
f
=
α
- częstotliwość względna
C
C
x
r
r
r
1
1
'
1
α
−
=
.
Występujące we wzorze (2) rezystancje i reaktancje są odniesione do impedancji
znamionowej
n
n
n
I
U
Z
=
.
Poślizg s
f
określa zależność
α
αω
ω
αω
s
1
1
s
0
0
f
−
−
=
−
=
.
Jako drugi z warunków, który powinien być spełniony, jest ograniczenie ilości wydzielanego
ciepła. Wielkość strat cieplnych charakteryzuje tzw. całka cieplna
∫
=
r
0
2
1
d
i
Q
τ
τ
,
(3)
gdzie: i
1
– wartość chwilowa prądu stojana, τ
r
– czas trwania rozruchu.
Przy rozruchu o stałym przyspieszeniu moment silnika jest równy:
2
j
e
)
s
1
(
k
aH
m
−
+
=
.
(4)
Niezbędną dla spełnienia równości (2) wartość momentu m
e
otrzymamy przez
odpowiednią regulację napięcia. Wyrażenie (2) możemy przedstawić w postaci
α
f
2
2
2
e
s
r
i
m
⋅
=
.
(5)
Po przekształceniu zależności (5) możemy obliczyć prąd wirnika
2
e
2
f
e
2
r
)
s
1
(
m
r
s
m
i
+
−
=
=
α
α
.
(6)
Przy założeniu i
1
≈
i
2
= i, całka cieplna może być zastąpiona sumą iloczynów
,
określonych po podziale rozpatrywanego przedziału czasu 0
< τ < τ
τ
Δ
⋅
2
j
2
i
r
na dostatecznie małe
odcinki Δτ. Otrzymamy wtedy:
τ
Δ
Σ
⋅
=
2
j
2
i
Q
(7)
gdzie:
2
j
j
ej
2
j
2
r
)
s
1
(
m
i
+
−
=
α
;
co odpowiada momentowi w j-tym odcinku przedziału czasu 0
< τ < τ
r
m
ej
= aH + k(1-s
j
)
2
.
gdzie: s
j
= 1 – a τ
j
; τ
j
= j Δτ; j = 1, 2, 3, ...
Teoretyczny koniec rozruchu nastąpi, gdy poślizg s
j
= s
k
przy częstotliwości
znamionowej.
Jak wyżej wspomniano, przy jednoczesnej regulacji napięcia i częstotliwości silnik w
czasie rozruchu powinien rozwijać moment maksymalny przy poślizgu krytycznym
określonym zależnością (8)
2
2
k
2
1
2
fk
x
'
r
C
r
s
α
+
=
.
(8)
Wyrażając poślizg krytyczny przez prędkość kątową wirnika otrzymamy
)
x
'
r
C
r
1
(
2
2
k
2
1
2
α
α
ω
+
−
=
.
(9)
Określenie względnej częstotliwości α dla każdej chwilowej wartości prędkości ω w
wygodnej dla analitycznego badania postaci jest bardzo uciążliwe. Dlatego założono, że r
1
<<
x
k
. Otrzymamy wtedy:
)
s
1
(
x
C
r
x
C
r
k
2
k
2
−
+
=
+
=
ω
α
.
(10)
Korzystając z (6) i (10) otrzymamy wyrażenie na prąd wirnika
k
e
2
x
C
m
i
=
.
(11)
W tym przypadku prąd wirnika wynika z założonego przyspieszenia i jest regulowany
w czasie rozruchu przez zmianę napięcia.
Na rysunku 2 przedstawiono obliczone na podstawie (7) przebiegi całki cieplnej w
zależności od przyspieszenia. Krzywa 1 stanowi przebieg rozruchu przy regulacji napięcia i
stałej częstotliwości, a krzywa 2 przy regulacji napięcia i częstotliwości według przyjętego
algorytmu.
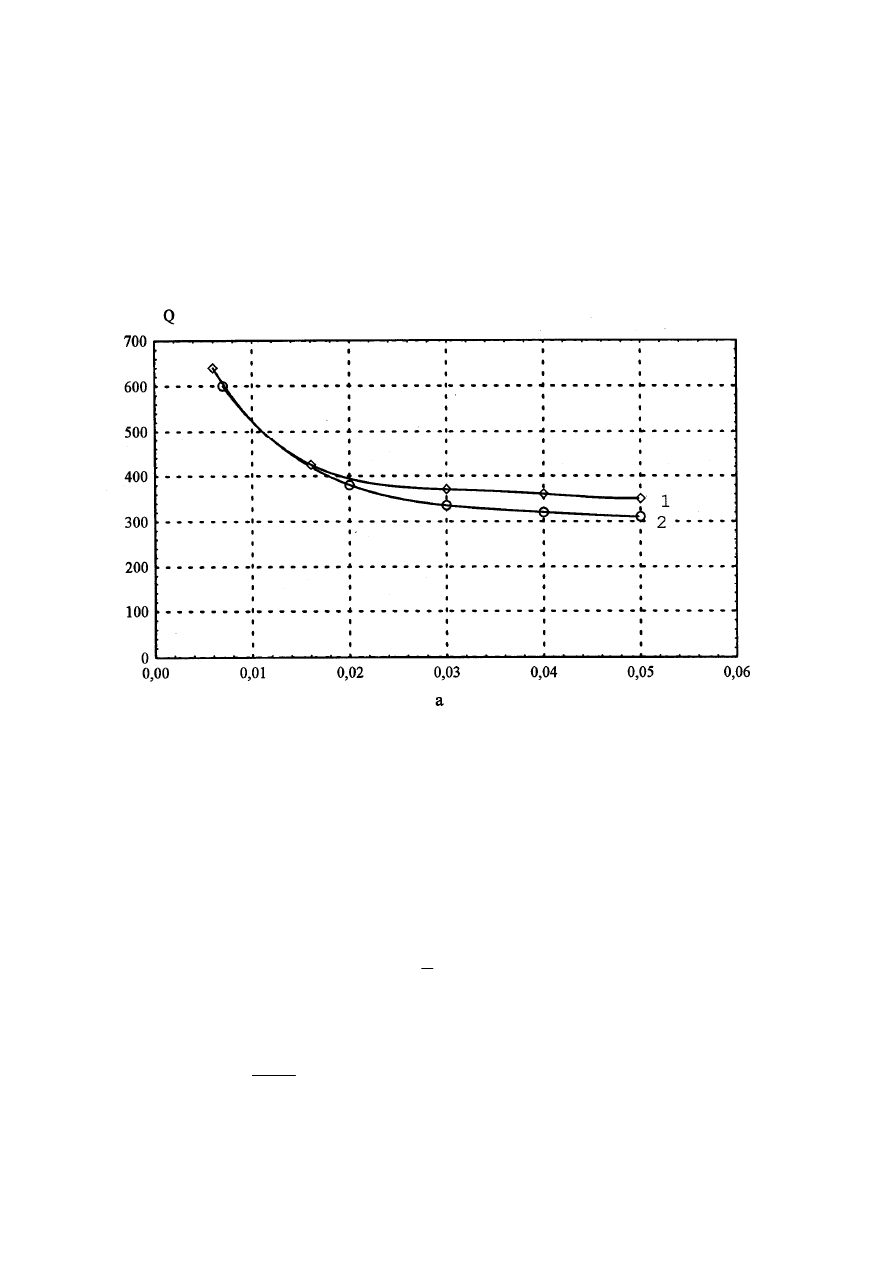
Z przebiegów tych wynika, ze funkcja cieplna osiąga mniejszą wartość przy
jednoczesnej regulacji napięcia i częstotliwości. Należy podkreślić, że dla przyspieszeń a >
0,3. funkcja Q(a) pozostaje praktycznie stała.
Wynika stąd, że bardziej korzystny jest rozruch przy jednoczesnej regulacji napięcia i
częstotliwości.
Rys. 2. Przebieg całki cieplnej: 1- regulacja napięcia przy f = const, 2 – jednoczesna regulacja napięcia
i częstotliwości.
Przy załączeniu do sieci silnika na założoną wartość napięcia oprócz prądów
okresowych, odpowiadających stanowi ustalonemu, pojawiają się wymuszone składowe
aperiodyczne, zanikające wykładniczo w czasie. Przybliżonej ich oceny można dokonać
poprzez sumowanie funkcji Q obliczonej w wyżej podany sposób i całkowej wielkości
∫
∞
τ
=
0
2
1
'
d
I
Q
, gdzie
a
T
t
1
s
1
e
I
I
−
=
=
(12)
gdzie: I
s=1
– wartość skuteczna okresowej składowej prądu I
1
przy s = 1
2
1
k
a
r
r
x
T
+
≅
– stała czasowa zanikania prądu I
1
.
Po określeniu całki w (12) mamy
2
T
I
'
Q
a
2
1
s
=
=
.
Należy zwrócić uwagę, że wraz ze zmniejszeniem zadanego przyspieszenia zmniejsza
się maksymalny prąd I
m
, odpowiadający w danym przypadku chwili (
τ = 0) po włączeniu
silnika do sieci zasilającej. Ilustruje to rys.3, na którym krzywa 1 przedstawia zmianę
wartości skutecznej składowej periodycznej prądu sieci I
p
przy
τ = 0 i różnych wartościach
przyspieszenia a = - ds/d
τ.
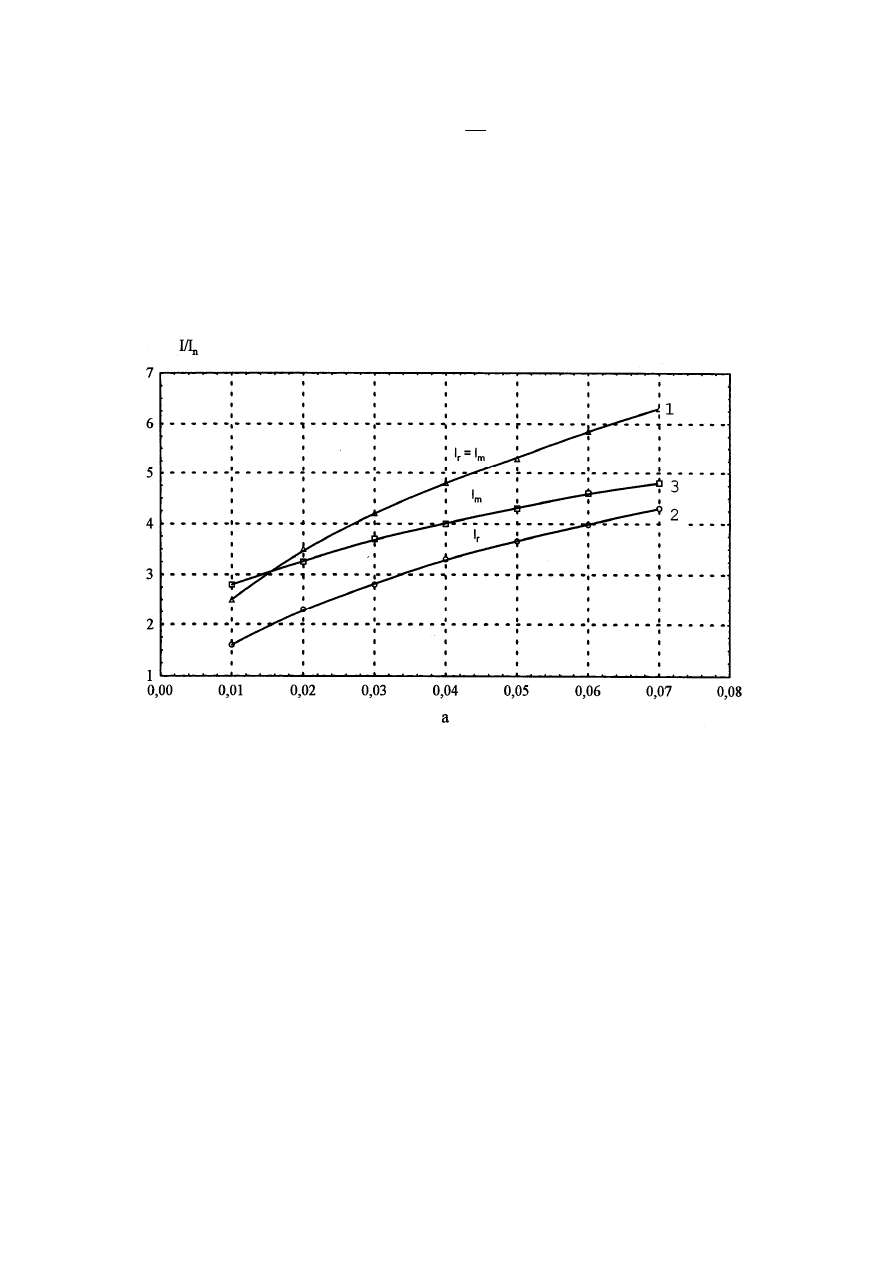
Rys. 3. Zmiana prądów rozruchowego i maksymalnego przy zadanym przyspieszeniu: 1- regulacja
napięcia przy f = const, 2,3 – jednoczesna regulacja napięcia i częstotliwości.
Podsumowując, z punktu widzenia minimalizacji funkcji cieplnej Q, najkorzystniejszy
jest rozruch bezpośredni, w przybliżeniu odpowiadający dla rozpatrywanych napędów
warunkowi a = 0,06
÷ 0,07. W związku z tym, zmniejszenie przyspieszenia wirnika do
wartości 0,02
÷ 0,04 mało wpływa na wielkość Q (rys.2), chociaż prądy rozruchowe i
momenty udarowe w tej sytuacji zmniejszają się 1,5
÷ 2 razy (rys.3). Dalsze zmniejszenie
parametru a powoduje szybki wzrost funkcji cieplnej Q, dlatego przy realizacji płynnego
rozruchu pomp głębinowych rozpatrywanego typu, wartość przyspieszenia należy ograniczyć
od dołu a
≥ 0.02 ÷ 0.03.
Wyniki obliczeń wartości skutecznej prądu stojana z pominięciem wpływu
składowych aperiodycznych przy równoczesnej regulacji napięcia i częstotliwości pokazują
krzywe 2 i 3 na rys. 3. Przy obliczeniach tak dobrano wartości chwilowe napięcia
zasilającego, aby silnik pracował przez cały czas trwania rozruchu przy poślizgu krytycznym.
Właściwości otrzymanych funkcji niewiele się różnią od wcześniej otrzymanych, gdy
zmieniało się napięcie przy stałej znamionowej częstotliwości.
Zmiana częstotliwości wg opisanego algorytmu pozwala dodatkowo obniżyć wartość
udarowej składowej okresowej prądu przy s = 1 w przybliżeniu 1.5 raza. W tym czasie można
zaobserwować zmniejszenie maksymalnego prądu w zakresie mniejszych poślizgów, przy
czym ze zmniejszeniem parametru a różnica między prądem udarowym I
p
i maksymalnym I
m
zgodnie z rys. 24 (krzywe 2 i 3) rośnie tak, że dla a = 0,017 prąd maksymalny I
m
przy
równoczesnej regulacji napięcia i częstotliwości jest taki sam, jak w przypadku zmiany tylko
napięcia.
4. Wnioski
Z przeprowadzonych rozważań wynikają następujące wnioski:
1. Zaproponowany sposób sterowania rozruchem silnika głębinowego, przy założeniu
utrzymywania stałej wartości przyspieszenia i ograniczenia funkcji cieplnej Q, pozwala na
poprawienie jego jakości.
2. Wraz ze zmniejszeniem napięcia i przyspieszenia rośnie czas trwania rozruchu oraz
wartość funkcji cieplnej. W zakresie przyspieszeń a > 0,03 funkcja Q(a) prawie się nie
zmienia.
3. Przy wyborze przyspieszenia poniżej wartości 0,03 obserwuje się szybki wzrost wartości
funkcji cieplnej, co ogranicza możliwość rozruchu silnika z przyspieszeniem mniejszym
niż a < 0,02.
4. Ze względu na trudne warunki pracy silnika falownik realizujący rozruch według
omówionego sposobu regulacji powinien mieć możliwie prostą budowę.
5. Przy obniżeniu przyspieszenia 2 – 2,5 raza (w porównaniu z rozruchem bezpośrednim)
wartość funkcji cieplnej rośnie o 6 – 10 %, natomiast udarowe prąd i moment są mniejsze
1,5 – 1,6 raza. Z tego punktu widzenia wydaje się celowe, by podczas rozruchu silnika
zasialnego ze źródła o ograniczonej mocy poprzez regulację napięcia ograniczyć wartość
przyspieszenia do wartości a = 0,02 – 0,03.

6. Literatura
1. Brinner T.R., Traylor F.T, Stewart R.H.: Cauves and preventium of vibration
injuced failures in submersible oil well pumping equipment. AIMH-SPE New Gricam, LA,
Sept (1982)..
2. Kowalowski H.: Maszyny i napęd elektryczny. Warszawa, PWN, (1983).
3. Зюзев А. М.: Технологический электропривод системы ТПН-АД для агрегатов
нефтегазового комплекса. Электротехника, № 8, 1998.
Streszczenie: Obserwowany w ostatnich latach wzrost zainteresowania alternatywnymi
źródłami energii spowodował, że indywidualni użytkownicy instalują tego typu urządzenia na
własnych posiadłościach. W wielu przypadkach niekonwencjonalne „domowe elektrownie”
mają stosunkowo niedużą moc. Ogranicza to w dość znaczny sposób możliwość zasilania z
nich układów napędowych z silnikami indukcyjnymi, które mają znaczny prąd rozruchowy.
W referacie zaproponowano sposób regulacji silników głębinowych indukcyjnych
wykorzystanych do napędu pomp odśrodkowych. Przedstawiony sposób regulacji tego typu
napędów pozwala na forsowanie napięcia podczas rozruchu oraz w znaczny sposób obniża
wartość początkową prądu rozruchowego. Przeprowadzono również analizę napędu pod
kątem wydzielanego przez napęd ciepła w czasie rozruchu. Wykazano, że przyjęty sposób
regulacji poprawia właściwości napędu również w tym zakresie. Omówiony sposób regulacji
może być wykorzystany do wszystkich napędów z silnikami indukcyjnymi.
Document Outline
Wyszukiwarka
Podobne podstrony:
Ks Tomasz Kraj artykul o IVF
STEFANquot JEDEN Z WYKLETYCHquot artykul dr Tomasza Labuszewskiego
Artykuł Tomasza Roli dot twórczości Andrzeja Trzebińskiego
Skansen żeki Pilcy w Tomaszowie Mazowieckim
dodatkowy artykul 2
ARTYKUL
laboratorium artykul 2010 01 28 Nieznany
Fizjologia snu Artykul
energoefekt artykul transmisja danych GPRS NiS[1]
Komunikacja interpersonalna Artykul 4 id 243558
artykul profilaktyka cz2 id 695 Nieznany (2)
kryteria oceny podręczników artykuł
Artykul (2015 International Jou Nieznany
ARTYKUL Mieszanki niezwiazane na podbud
artykul bromy id 69542 (2)
archetypy w reklamie artykul ma Nieznany (2)
Medyczny artykuł naukowy Zasady dobrej praktyki publikacyjnej [J E Zejda]
więcej podobnych podstron