Zestaw VI. Zadania przykładowe.
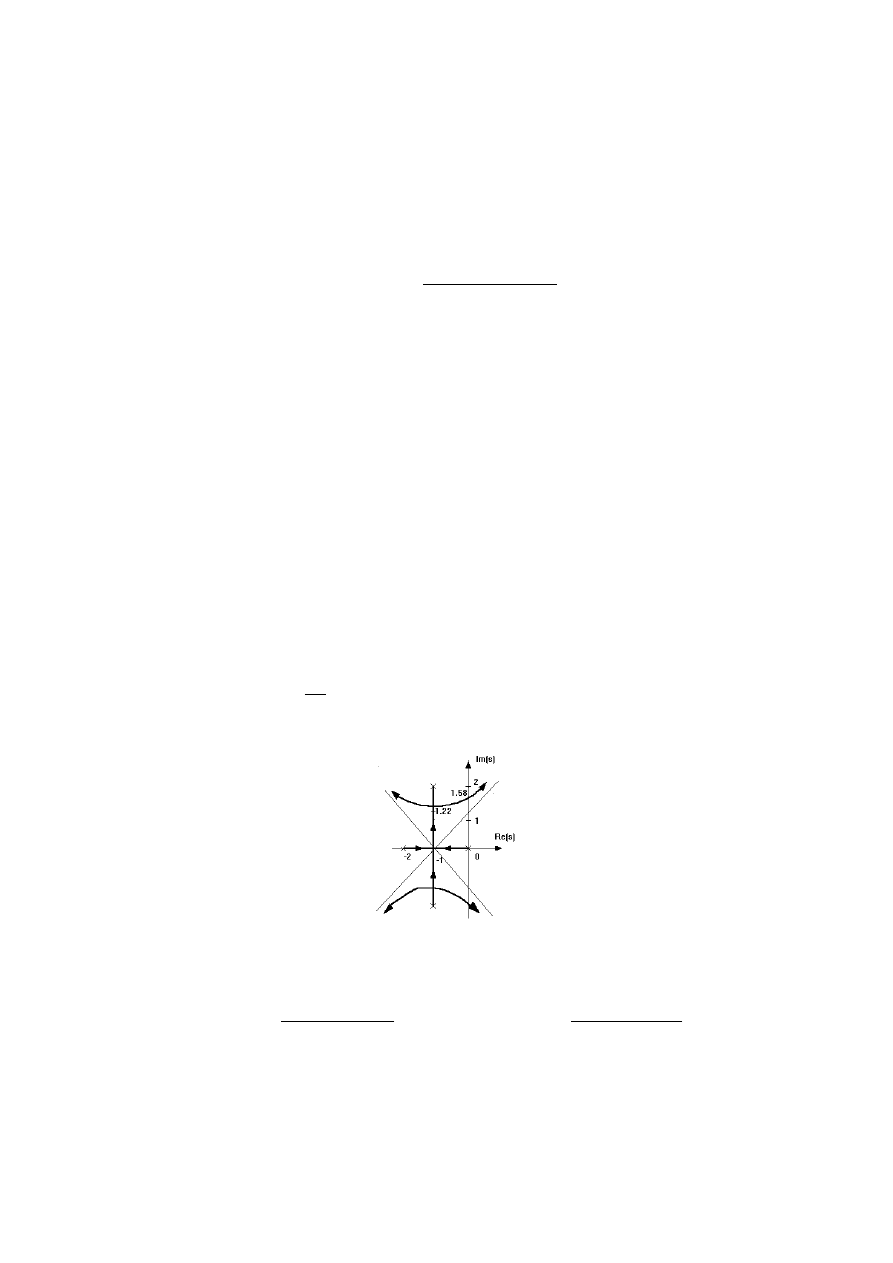
1. Wykre
ślić linie pierwiastkowe względem k dla :
G
s
k
s s
s
otw
( )
(
)[(
)
]
=
+
+
+
1
2
1
4
2
Rozwi
ązanie :
-Bieguny : p=0,-2,-1
±
j2,
-Asymptoty :
δ
a
= −
1,
φ
a
=
− −
45 135 45 135
,
,
o
-K
ąty wyjścia : dla -1+j2
→
= −
φ
wy
90
o
dla -1-j2
→
=
φ
wy
90
o
-Przeci
ęcie osi Im(s): mianownik układu zamkniętego ma postać: s
s
s
s
k
4
3
2
4
9
10
0
+
+
+
+ =
,
wstawiaj
ąc s= j
ω
otrzymuje si
ę:
ω
ω
ω
ω
o
o
o
o
k
4
3
9
0
4
10
0
−
+ =
−
+
=
,
sk
ąd k=0,
ω
o
=
1 58
,
- Pierwiastki wielokrotne:
−
=
dk
ds
0, daje równ. 4
12
18
10
0
3
2
s
s
s
+
+
+ =
, którego pierwiastki s
ą: -
1, -1
±
j1.22.
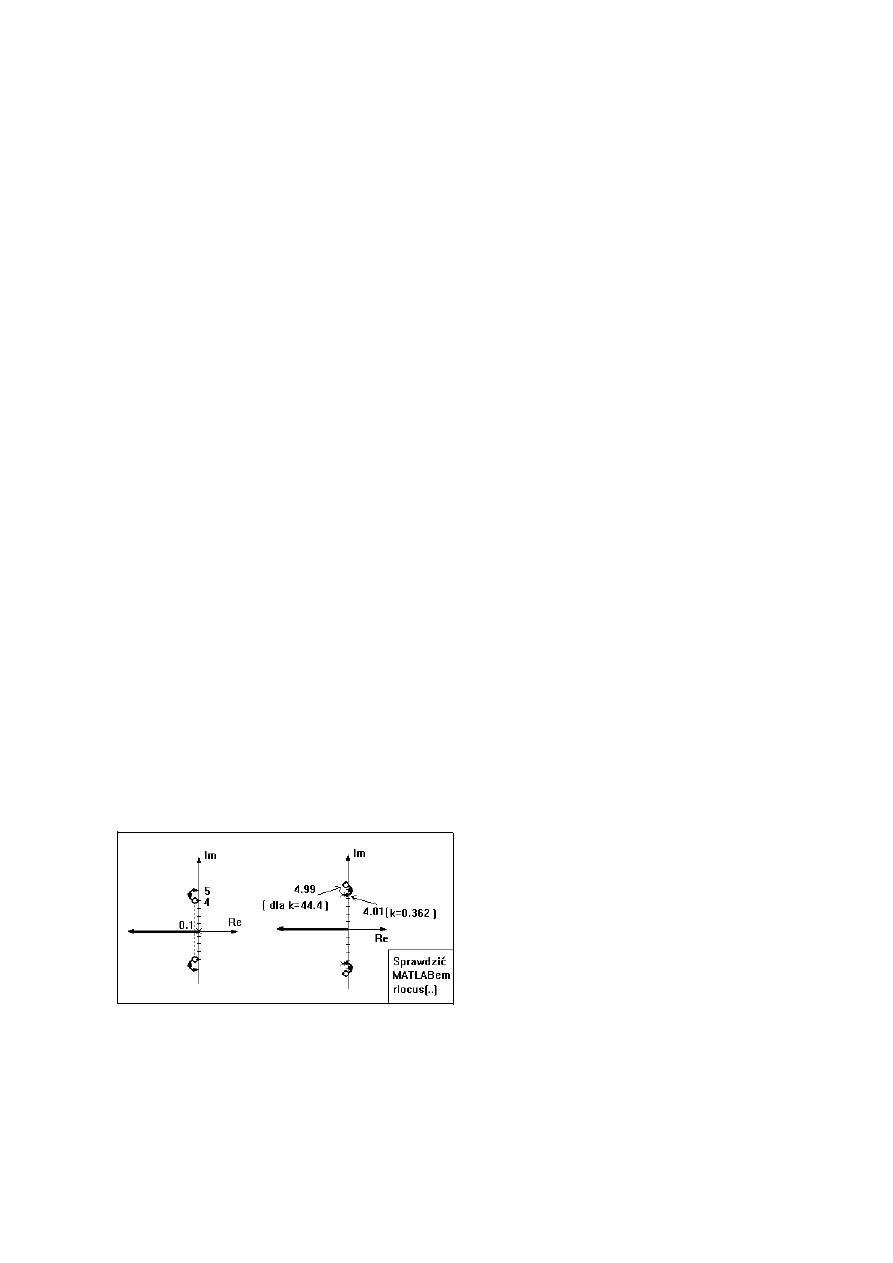
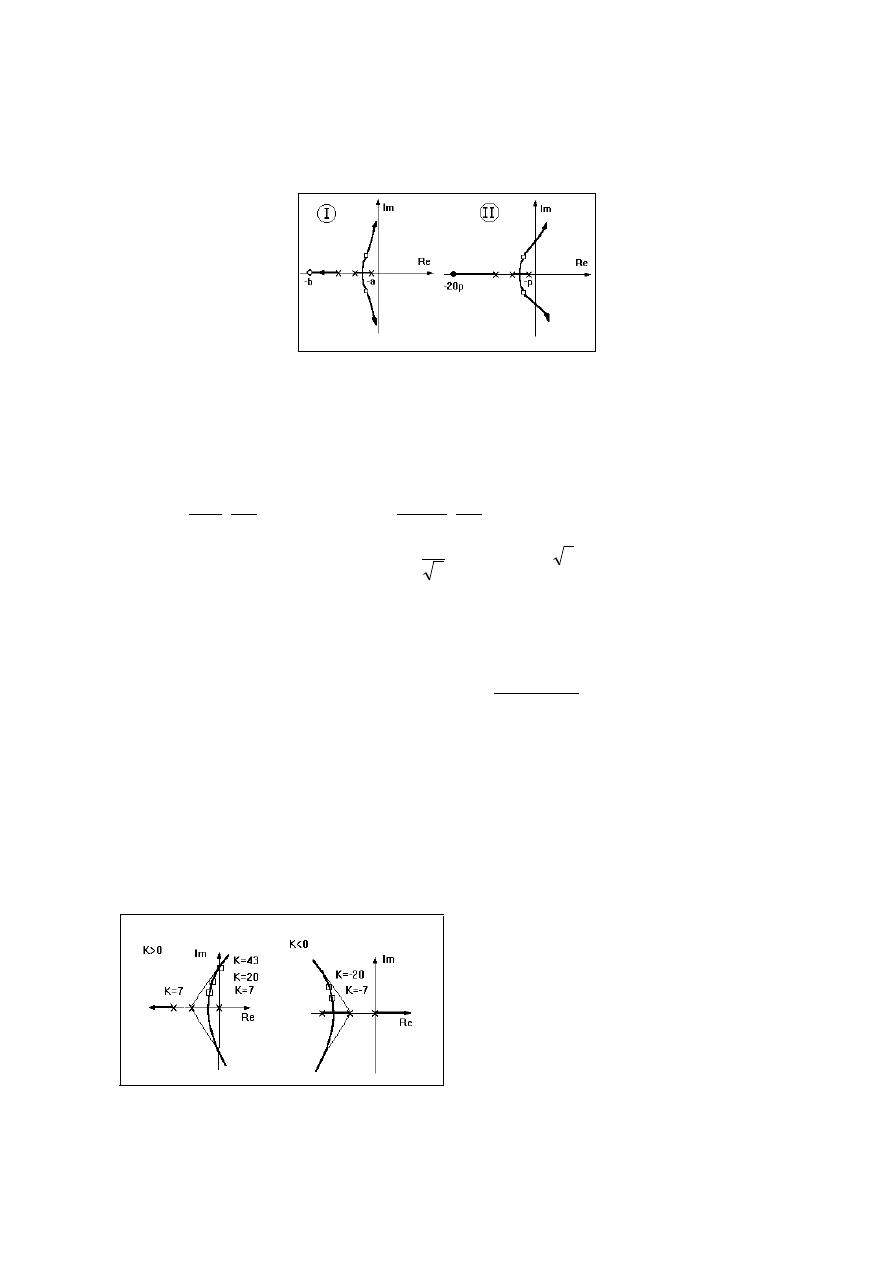
2. Naszkicuj,linie pierwiastkowe nast
ępujących dwu transmitancji :
G s
k
s
s s
1
2
2
0 1
16
0 1
25
( )
(
. )
[(
. )
]
=
+
+
+
+
, G
s
k
s
s s
2
2
2
0 1
25
0 1
16
( )
(
. )
[(
. )
]
=
+
+
+
+
gdzie zamieniono wyra
żenia w liczniku i mianowniku.
2
Rozwi
ązanie :
- Bieguny i zera : 0, -0.1
±
j4, - 0.1
±
j5 ( le
żą w pobliżu ),
- Asympta:
φ
a
=
180
o
- K
ąty: G s
1
( )
→
biegun: -0.1+j5,
φ
wy
≅
180
o
(wyj
ście na lewo),
zero: -0.1+j4,
φ
we
≅
180
o
( wej
ście z lewej ),
Uwaga :
k
ąty wektorów (-0.1+j4), (-0.1+j5) sa bliskie 90
o
ze wzgledu na niewielk
ą część
rzeczywist
ą.
-K
ąty G
2
(s)
→
biegun: -0.1+j4,
φ
wy
≅
0
o
(wyj
ście w prawo)
zero: -0.1+j5,
φ
we
≅
0
o
(wej
ście z prawej),
-Przeci
ęcie
Im:
G
1
(s)
→
mianownik
układu
zamkni
ętego
ma
posta
ć:
s
k
s
k
s
k
3
2
0 2
0 2
25 01
16 01
+
+
+
+
+
⋅
(
. )
( .
.
)
.
Kontrola, czy przeci
ęcie możliwe dla k>o; Hurwitz (Routh) daje :
(
. )( .
.
)
.
k
k
k
+
+
−
⋅ >
0 2 0 2
25 01
16 01
0
→
0 2
9 04
5 0
0
2
.
.
.
k
k
+
+
>
co nie mo
że być spełnione dla k>0. Zatem nie ma przecięcia.
G s
2
( )
→
s
k
s
k
s
k
3
2
0 2
0 2
16 01
25 01
0
+ +
+
+
+
⋅ =
(
. )
( .
.
)
.
Hurwitz: 0 2
8 96
3 2
0
2
.
.
.
k
k
−
+
>
→
k
kr
,
.
1
44 4
=
,
k
kr
,
.
2
0 362
=
.
S
ą więc dwa przecięcia. Podstawiając s=j
ω
i k
kr
do mianownika dostaje si
ę
ω
01
4 99
,
.
=
,
ω
0 2
4 01
,
.
=
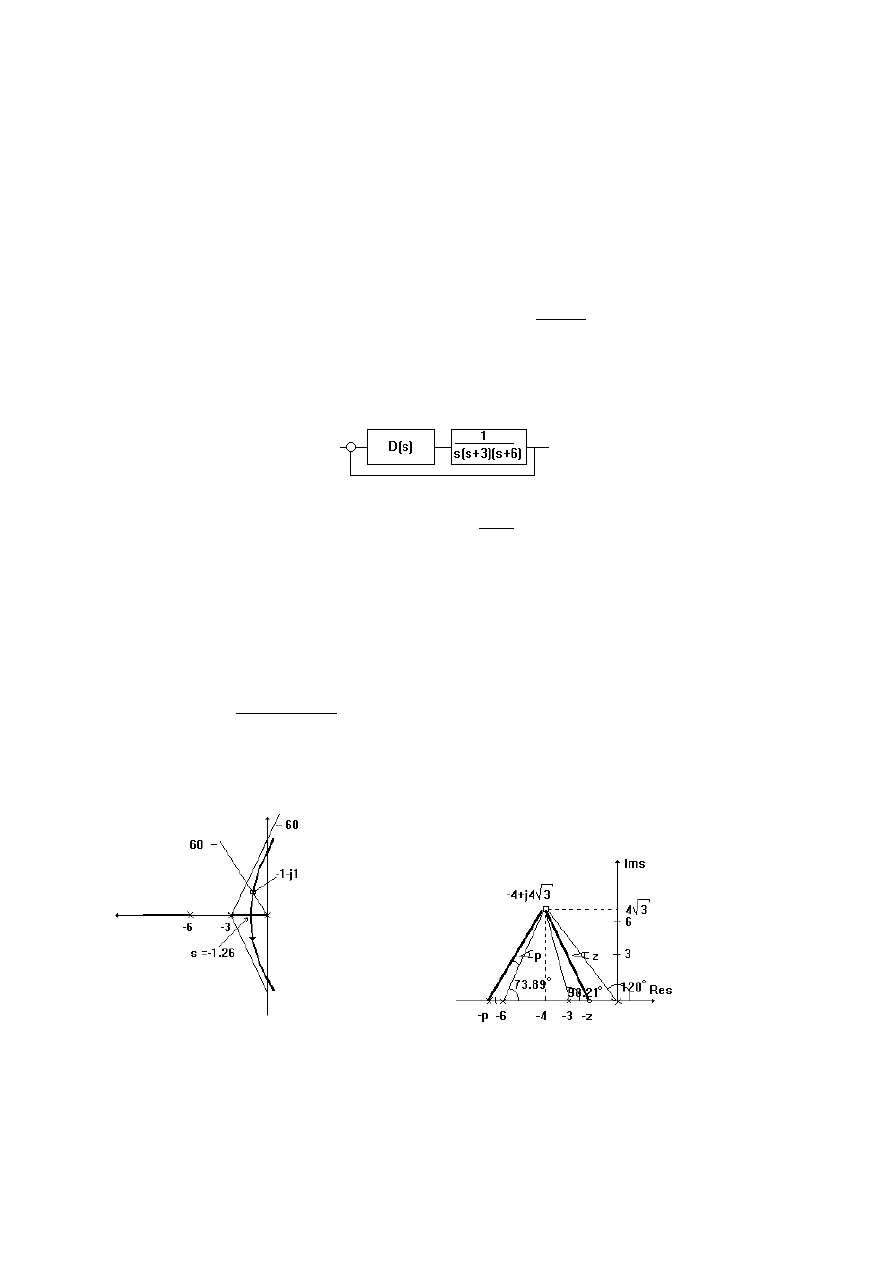
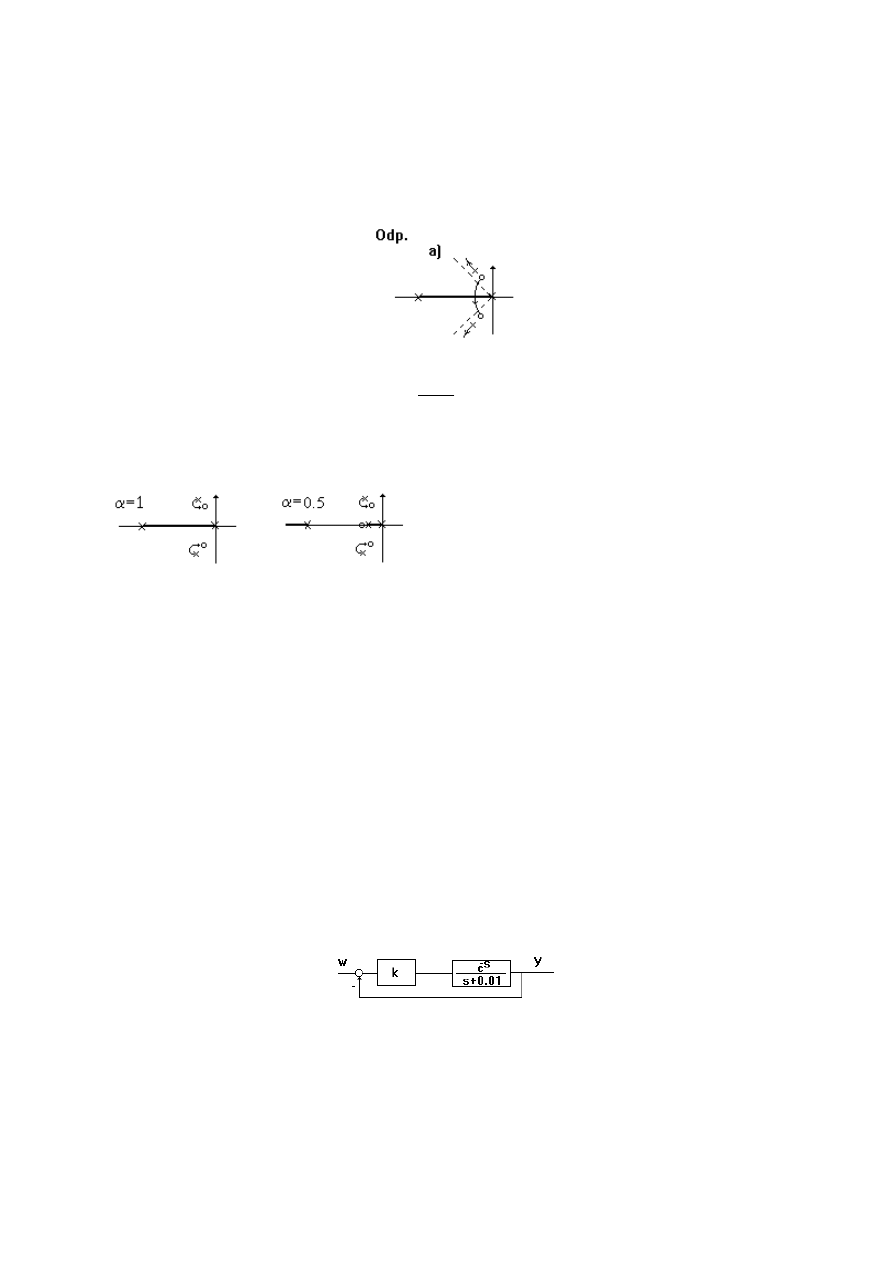
3.Dany jest serwomechanizm jak na rysunku.
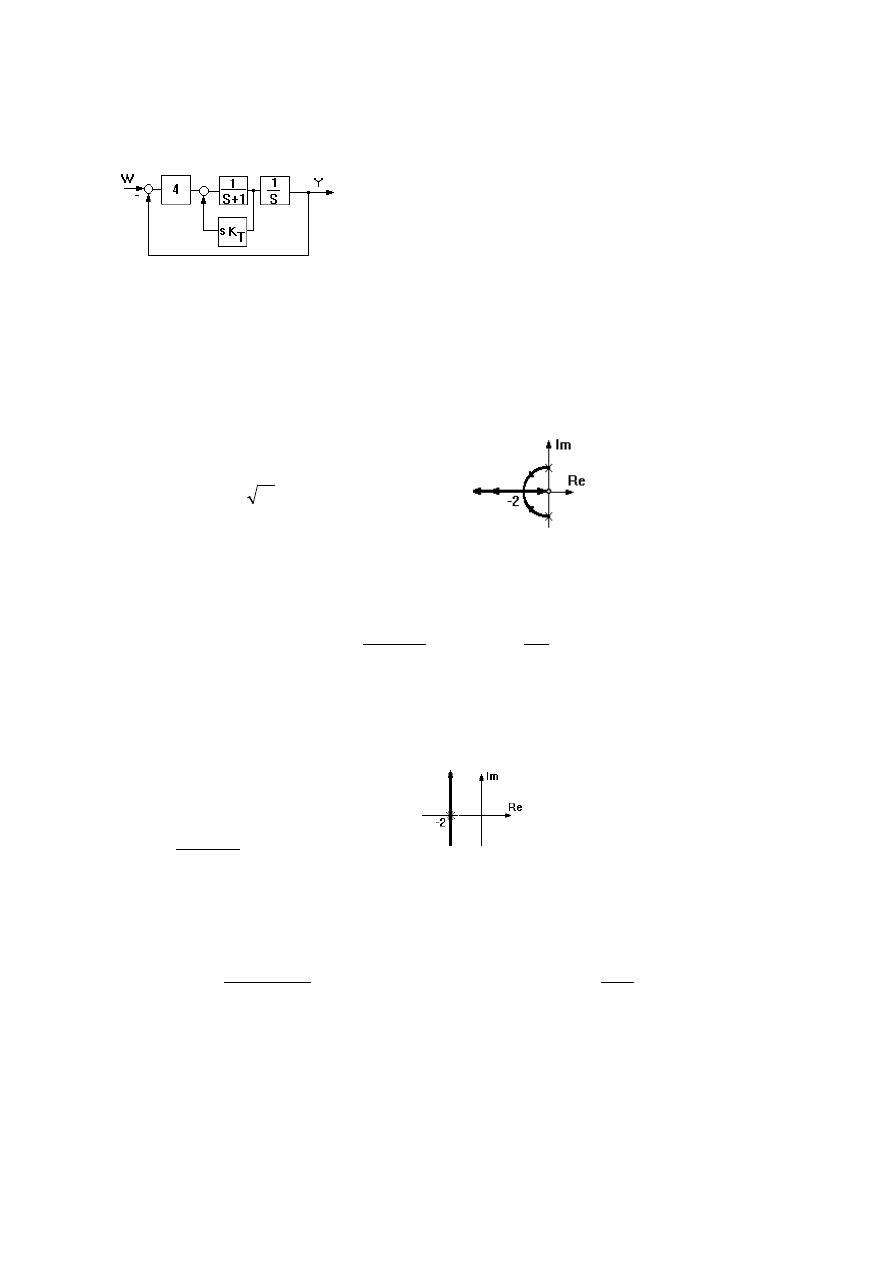
3
a).Wykre
ślić linie pierwiastkowe względem K
T
b) Wyznaczy
ć K
T
, które zapewnia przebiegi aperiodyczne kr-
ytyczne. Ile wyniesie wtedy czas regulacji (z dokł.1% ).
c) Rozpoczynaj
ąc od K
T
okre
ślonego w (b), sporządzić z ko-
lei wykres lini pierwiastkowych wzgl
ędem
∆
K , gdzie k=k+
∆
K (tor główny).
d) Dla jakiego
∆
K układ zamkni
ęty miałby biegun w -2+j2 (45
°
)?.
Rozwi
ązanie:
a) Mianownik układu zamkni
ętego:
s
s
K s
T
2
4
0
+ + +
=
-Bieguny: -0.5 (
)
1
15
±
j
, zero- 0
-Wykres jest półokr
ęgiem o promieniu 2.
b)
,
dla punktu rozwidlenia.
c)
Mianownik:
s
s
K
s
s
s
K
2
2
4
3
4
4
0
+ + +
+ = + + +
=
∆
∆
,
-Bieguny: -2 (podwójny), zero-brak,
-Punkt rozwidlenia: -2
-Wykres-linie pionowe(rys.)
d)
∆
K
s
s
s
j
= − + +
=
=− +
2
2
2
4
1
4
/
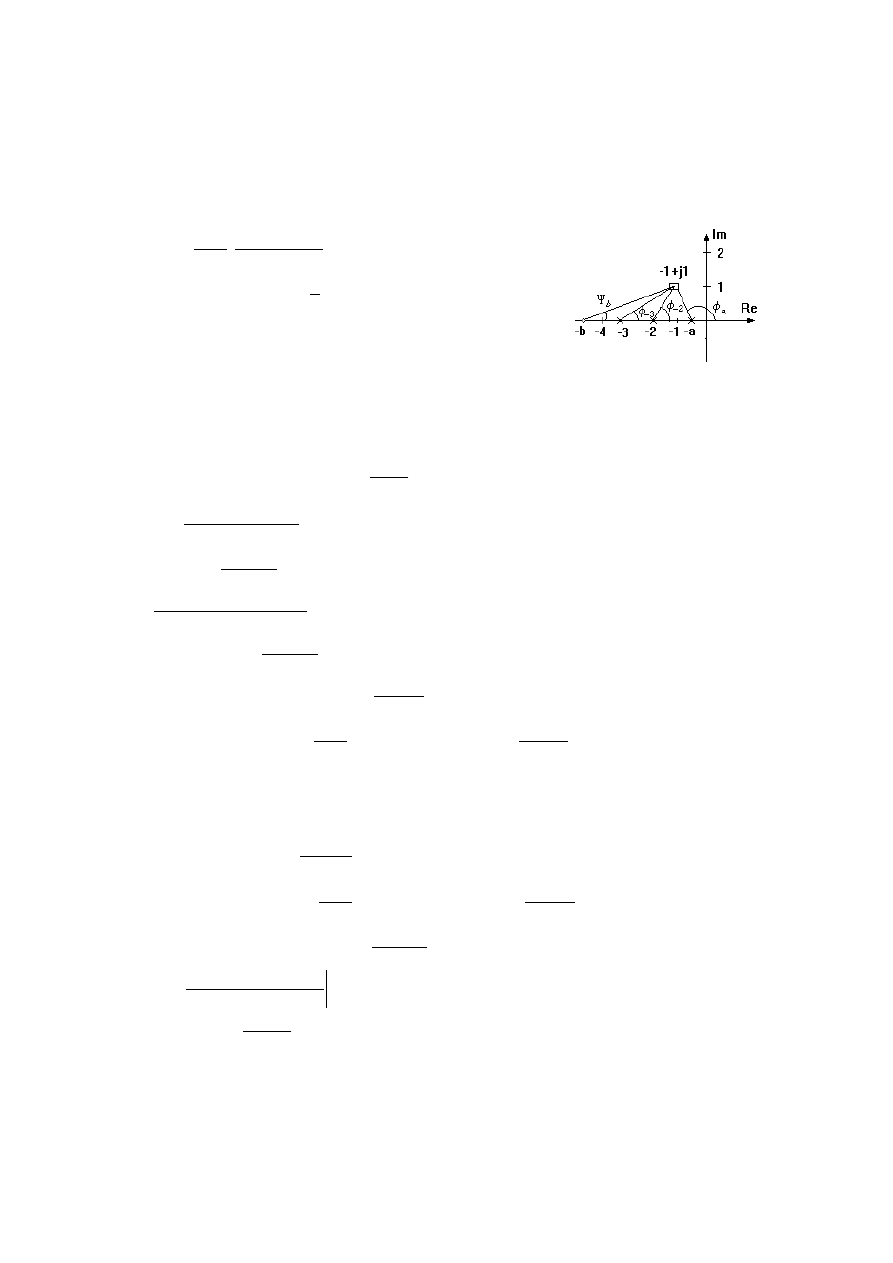
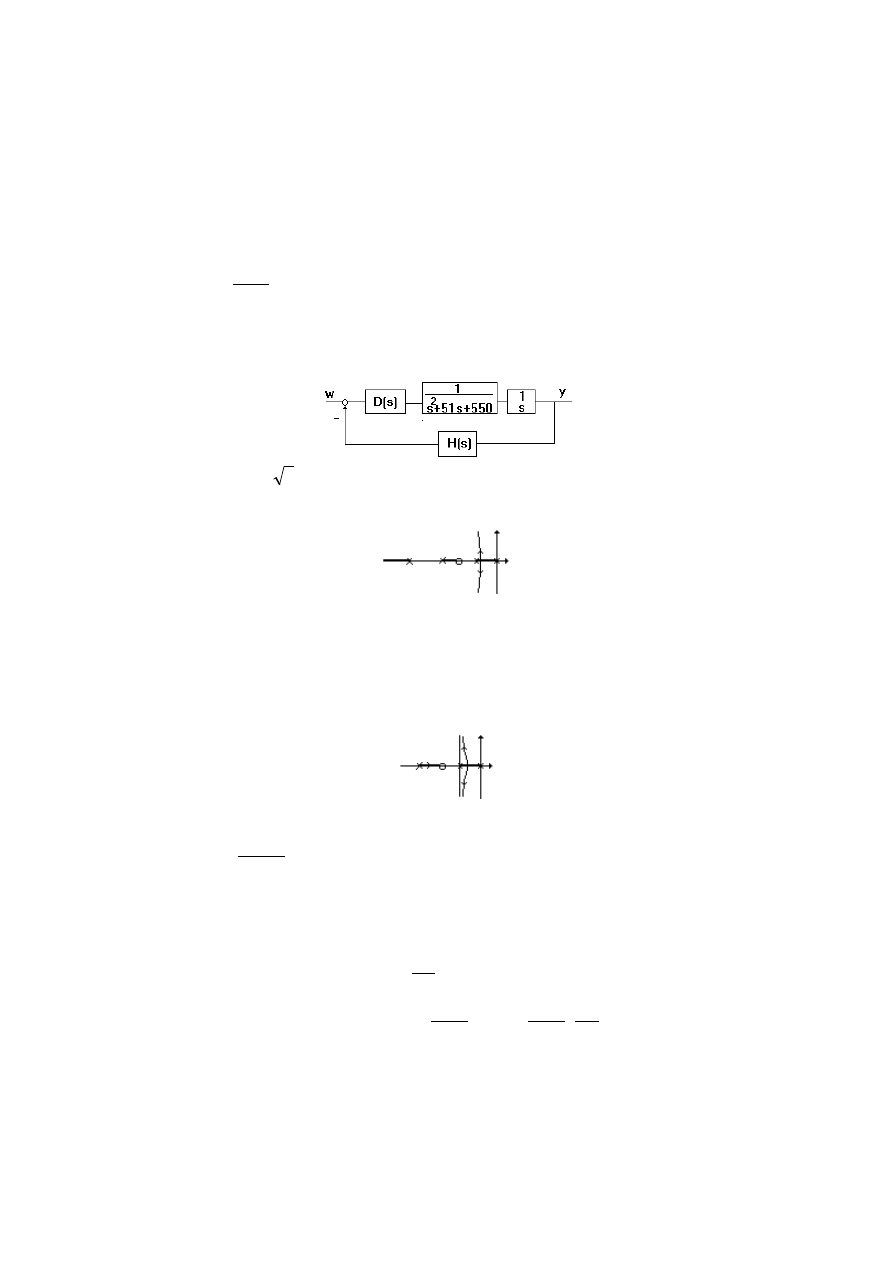
4. Niech G s
s
s
0
1
2
3
( )
(
)(
)
=
+
+
(obiekt). Dobra
ć kompensator D s K
s b
s a
( )
=
+
+
aby bieguny układu
zamkni
ętego znalazły się w punkcie s= -1-j1 ( , %
. )
45
4 3
o
P
=
.Jak wygladaj
ą wtedy linie
pierwiastkowe?.
K
s
s
s
T
s
= − + +
=
=−
2
2
4
3
/
;t
r
≅
=
4 6
2
2 3
.
. (1%)
4
Rozwiazanie:
G
s
K
s b
s a
s
s
otw
( )
(
)(
)
=
+
+
⋅
+
+
1
2
3
-K
ąty:
φ
−
=
2
45
o
,
φ
−
=
=
3
1
2
26 56
arctg
.
o
,
-Warunek fazy: -< G
a
b
= + +
+
−
=
−
−
φ
φ
φ
2
3
180
Ψ
o
-Powinny zachodzi
ć warunki:
φ
a
〉150
o
,
Ψ
b
〈26 56
.
o
aby w D(s)
było a>o, b>0, kompensator opó
źniający("lag").
I wariant - niezale
żne a,b.
Niech np.
Ψ
b
=
15
o
Wtedy b
tg
=
+ =
1
15
1 4 73
o
.
, oraz
φ
φ
φ
a
b
=
+
+
+
=
−
−
180
123 44
2
3
Ψ
.
o
,
st
ąd a
tg
= −
−
=
1
1
180 123 44
0 34
(
.
)
.
,
Zatem D s
K
s
s
( )
.
.
=
+
+
4 73
0 34
.
K
s
s
s
s
s
j
= − +
+
+
+
=
=− −
(
.
)(
)(
)
.
/
.
0 34
2
3
4 73
0 9812
1
1
Wynik: D s
s
s
( )
.
.
.
=
+
+
0 9812
4 73
0 34
II Wariant - typowe a, b, np. D s
K
s
p
s
p
( )
=
+
+
10
("lag").
-Warunek fazy: [
(
)]
.
(
)
180
1
1
45
26 56
1
10
1
o
o
o
−
−
+
+
−
−
=
arctg
p
arctg
p
180
o
Równanie to nale
ży rozwiazać iteracyjnie poszukując p. (MATLAB). Okazuje się jednak,że dla p
∈
(o,1) lewa strona nie przekracza 175,
świadcząc o niedostatecznym, rozsunięciu p i 10p.
-Niech wi
ęc teraz D s K
s
p
s
p
( )
=
+
+
20
(20 krotnie rozsuni
ęcie).
Warunek fazy [
(
)]
.
(
)
180
1
1
45
26 56
1
20
1
o
o
o
−
−
+
+
−
−
=
arctg
p
arctg
p
180
o
. Po kilku próbach
otrzymuje si
ę: p=0.55, czyli D s K
s
s
( )
.
=
+
+
11
0 55
Teraz
K
s
s
s
s
s
j
= − +
+
+
+
=
=− +
(
.
) (
) (
)
.
0 55
2
3
11
0 354
1
1
Wynik:
D s
s
s
( )
.
.
=
+
+
0 354
11
0 55
Linie pierwiastkowe:
5
Wnioski
-Wariant I jest "bezpieczniejszy" ze wzgl
ędu na mniejsze zagrożenie niestabilnością.
-Projektowanie prowadzi si
ę często metodą kolejnych prób, jak w wariancie II.
-Instrukcja MATLABa obliczania fazy ma posta
ć:
180
1
1
180
45 26 56
1
20
1
180
−
−
⋅
+ +
−
−
⋅
a
p
a
p
tan [
.
tan
]
Π
Π
-Punktowi S=-1+j1 odpowiadaj
ą:
ξ =
≅
1
2
0 707
.
,
ω
n
=
2 ,
t
r
=
4 6
. (dla 1%), P%=4.3
5. Transmitancja układu otwatego ma posta
ć:
G
s
K
s s
s
otw
( )
(
)(
)
=
+
+
1
2
4
.
Sporz
ądź wykresy lini pierwiastkowych dla (a) k>0, (b) k<0 Gdzie leżą pierwiastki układu
zamkni
ętego dla:(a)U=7,20, (b) k=-7,-20.
Rozwi
ązanie:
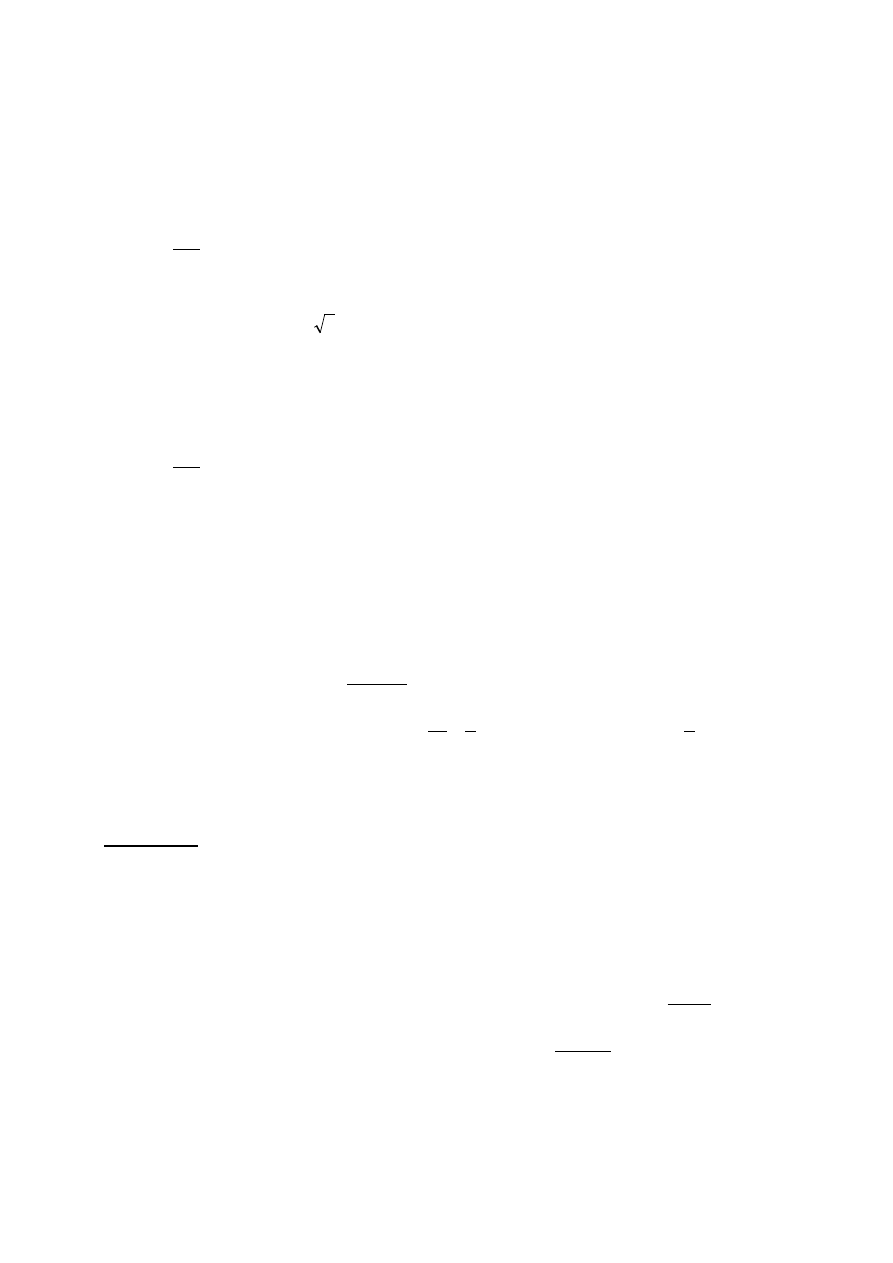
6
-Bieguny:p=0,-2,-4, Zera:nie ma
(a) k>0:
φ
a
= ±
60 180
o
o
,
,
σ
a
= −
2
,
−
= →
+
+ = → = −
dK
dS
s
s
s
b
0
3
12
8
0
0 845
2
.
Granica stabilno
ści: s
s
s k
3
2
6
8
0
+
+ + =
k
kryt
=
48,
ω
kryt
=
≅
2 2
2 83
.
Pierw. dla k=7
→ +
+ + =
s
s
s
k
3
2
6
8
0
roots(...)=-0.7054
±
j1.9198
(b) k>0:
φ
a
= ±
120 0
o
o
,
,
σ
a
= −
2
−
=
dK
dS
0
→
= −
S
b
3 155
.
k= -7
→
+
+ −
=
roots s
s
s
([
])
.
3
2
6
8
7
0 5891, -3.2946
±
1.0138
k= -20
→
roots(...)=1.2012, -3.6006
±
j1.9198
(Zwró
ć uwagę na symetrię wykresów względem środka ciężkości symptot
σ
a
)
(MATLAB :k=:-1:-50; r=rlocus(l,m,k) plot(r,'*') ).
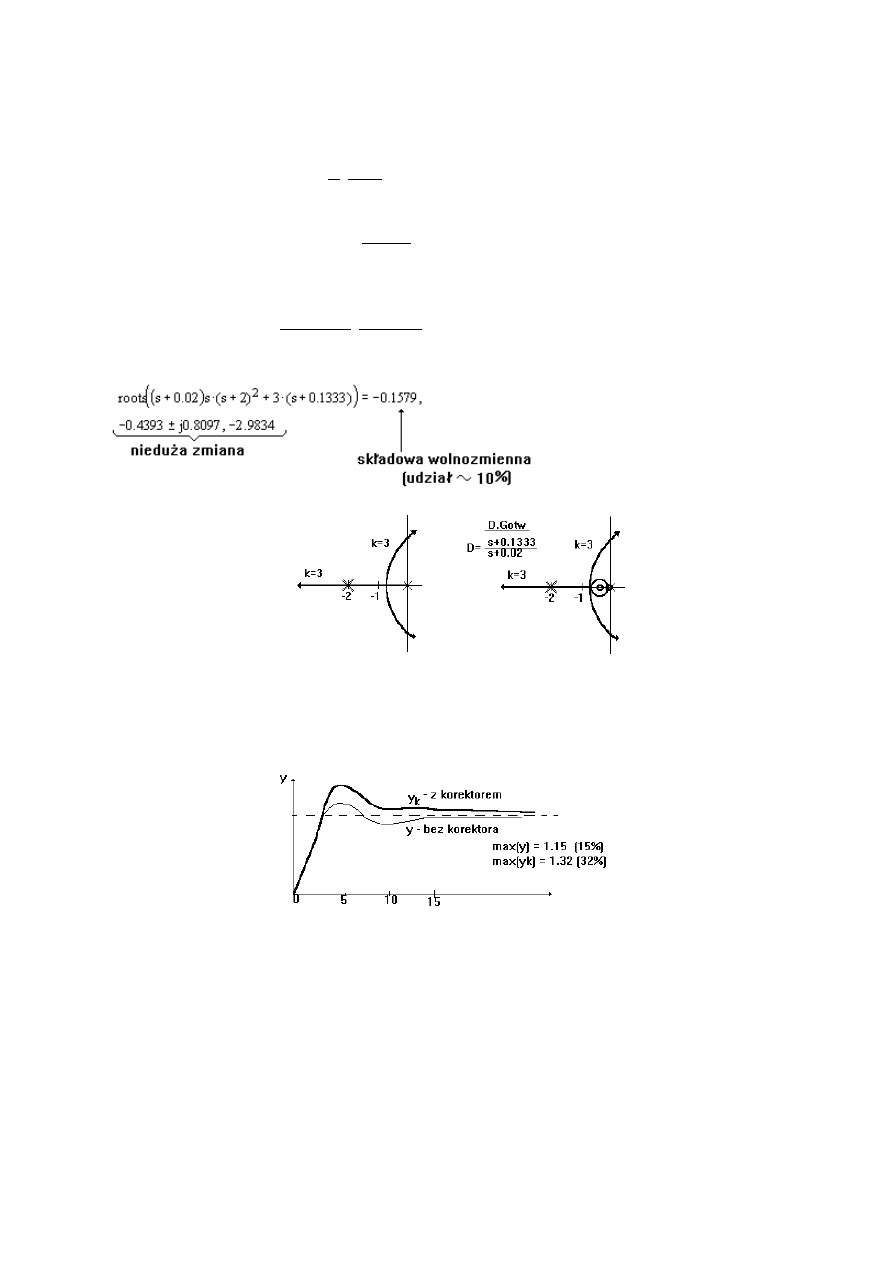
6. Układ o transmitancji G
s
s
otw
( )
(
)
=
+
3
2 2
2
ma zadowalaj
ące przebiegi dynamiczne, ale zbyt
du
ży uchyb dla wymuszeń liniowych, tzn. e
k
v
=
= ≅
1
4
3
1 33
.
, K
s G
s
v
s
otw
=
⋅
=
→
lim
( )
0
3
4
. Nie
naruszaj
ąc istotnie przebiegów spowodować, aby uchyb e zmalał do wartości 0.2 K
v
'
=
5 poda
ć
odpowied
ź skokową i liniową (MATLAB).
Rozwi
ązanie.
Układ pierwotny - pierwiastki :
- mianownik :
s
s
s
3
2
4
4
3
0
+
+ + =
±
roots(...) = -0.5
j0.866 , - 3
Uchyb e mo
żna zredukować dodając korektor opóźniający ( " lag " ). Aby nie naruszyć
odpowiedzi , korektor powinien mie
ć biegun i zero blisko układu. Niech D s
s z
s p
o
o
( )
= +
+
gdzie np. po=0.02 (100 razy mniej niż Z w Gotw ) czyli D s
s z
s
o
( )
.
= +
+
0 02
. Powinno zachodzi
ć
7
k
s D s G
s
z
v
s
otw
o
'
lim
( )
( )
.
= =
⋅
⋅
= ⋅
→
5
3
4 0 02
0
sk
ąd :
zo = 0.1333 , Teraz
Uwaga : można byłoby też
wybrać najpierw zo , np. 0.1,
a potem wyliczyć po jako
0.015
G
s
s
s s
otw
'
.
.
(
)
= ⋅ +
+
⋅
+
3
0 1333
0 02
1
2
2
MATLAB:
* Linie pierwiastkowe tworzy instrukcja rlocus(...)
* Odpowiedzi skokowe tworzy instrukcja step(...)
* Odpowied
ź liniową otrzymuje się dopisując 0 na końcu mianownika układu
zamkni
ętego (mz) i stosując funkcję step (...), tj.
mzl = conv( mz , [1 0] )
yl = step( lz , mzl , t )
wspólne wykresy :
8
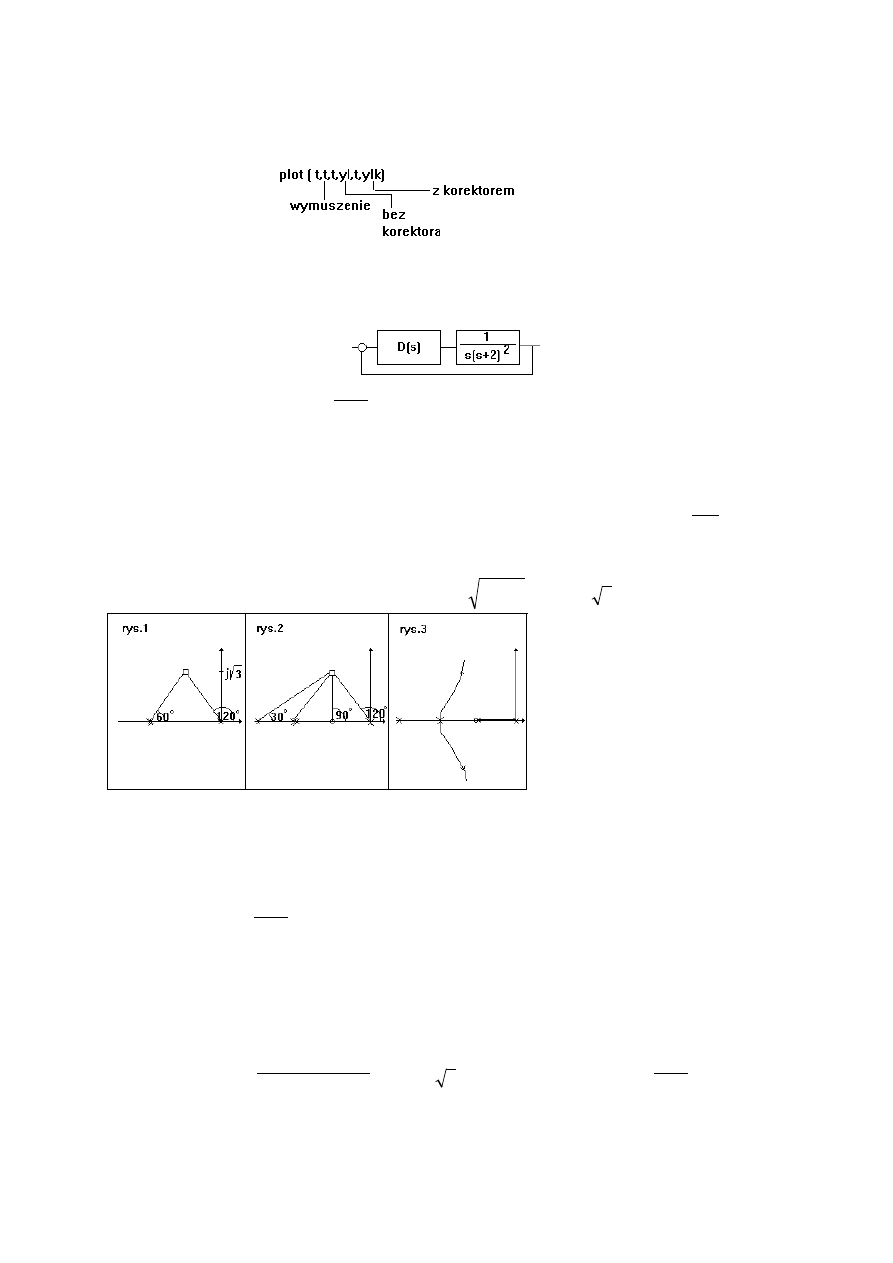
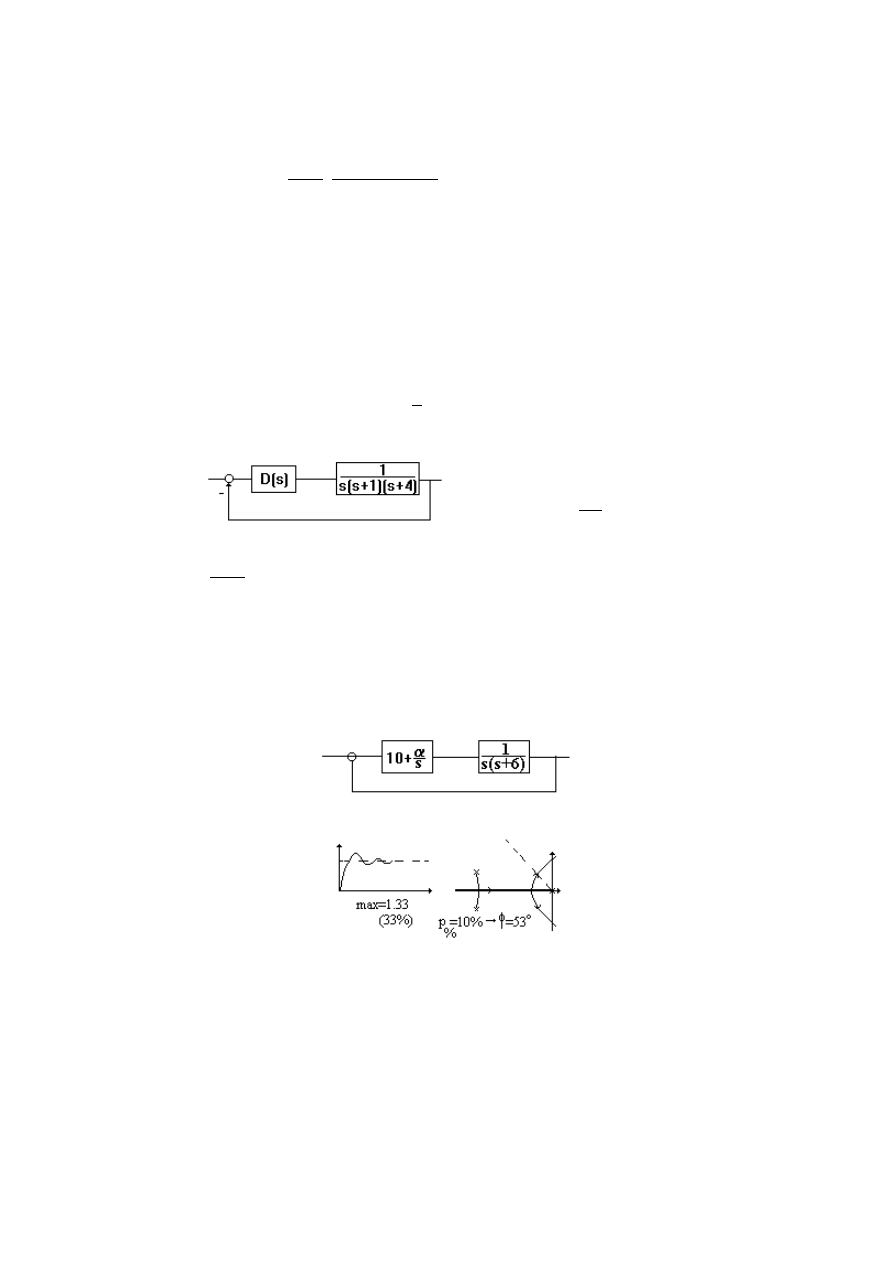
7.Układ automatyki ma posta
ć jak na rysunku.
Dobra
ć kompensator D s
k
s
z
s
p
( )
,
=
+
+
aby w układzie zamkni
ętym przeregulowanie było
mniejsze od 20%,a czas narastania mniejszy od jednej sekundy .
Rozwi
ązanie: Biorąc p%=16.3 <20% pozostaniemy przy
ξ
=0.5.Poniewa
ż tn
n
≅
<
1 8
1
.
ω
,
mo
żna więc przyjąć
ω
n
=
2 .
Bieguny układu zamkni
ętego :sb
j
j
= −
±
−
= − ±
ξ ω
ω
ξ
n
n
3
1
2
1
<
= ⋅
G
s
D G
ob
ob
(
)
) = -180 ( G
otw
o
, to<D= + 60o. Mo
żna to uzyskać
bior
ąc np :D s
k
s
s
( )
=
+
+
1
4
,czyli korektor przy
śpieszający (" lead ") - rys.2 (biegun i zero
wybrano dla uproszczenia obliczania k
ątów ).
Wzmocnienie :k
s s
s
s
= −
+
+
+
=
(
) (
)
2 2
4
1
16
s =-1+ j 3
, czyli D s
s
s
( )
=
+
+
16
1
4
9
Sprawdzenie linii pierwiastkowych -rys.3
roots([s(s+2)2 (s+4) + 16(s+1)]) =-0.76 ,
− ±
1
1 732
j .
,-5.25
Uwaga. Mo
żna byłoby też wybrać korektor postaci D s
k
s
z
s
z
( )
=
+
+
10
, ale obliczenia k
ątów
byłyby bardziej zawiłe.
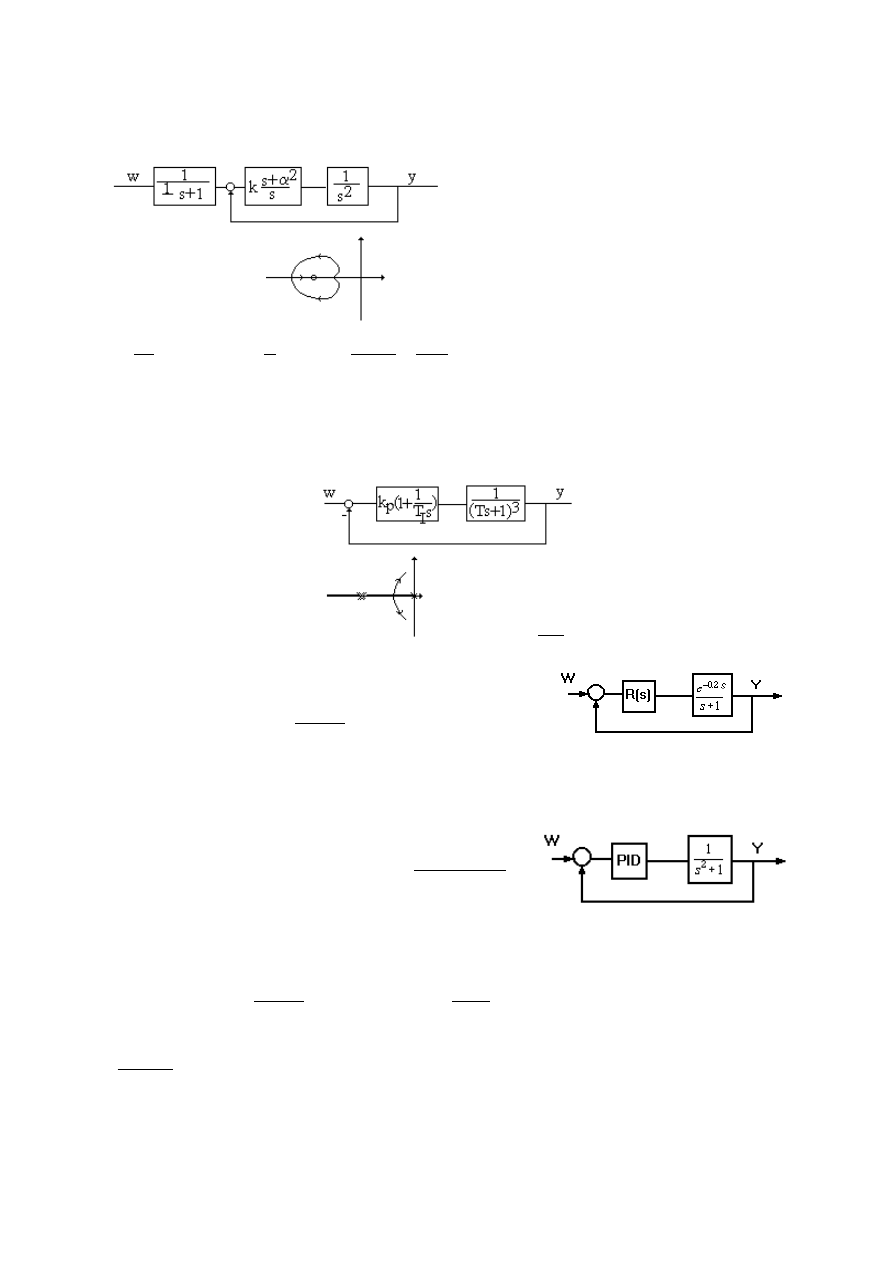
8.Dany jest serwomechanizm jak na rysunku.
Kompensator jest I pierwszego rz
ędu tj. D s
k
s
z
s
p
( )
=
+
+
a) Zaproponuj kompensator dla nast
ępujących danych:
p
s
%
%
.
)
≤
≤
≤ −
20
5
1
, t
, e
( wymuszenie liniowe
r
u
b)Wymaganie co do czasu regulacji zmieniono na t r
s
≤
1 25
.
Jaki kompensator teraz wybrałby
ś?
a) Niech k G(s)=k
1
3
6
s s
s
(
)(
)
+
+
Linie pierwiastkowe pokazano na rysunku
Rozwi
ązanie:
10
a)Niech
ξ
φ
=
=
0 5
16 3
.
. ),
( p%
wtedy = 60
o
.Bior
ąc s=-1+j1.73(matlab) przecięcie z linią
pierwiastkow
ą),z warunku modułu otrzymuje się k
G s s
=
=
1
28
( )
. , Wtedy t r
=
=
4 6
1
4 6
.
.
co odpowiada wymaganiom (5).Natomiast
e
K
s k G s
u
v
s
=
=
=
⋅ ⋅ ⋅
=
⋅
=
→
1
9
14
28
1
3 6
14
9
0
( K
v
lim
( )
)
,jest
zbyt du
że.
Nale
ży więc dodać korektor opóźniający ("lag"), czyli składnik
s
z
s
p
+
+
, gdzie p<<3.
Niech np. p=0.01 .Wymagane Kv wynosi:
1
0 1
10
0 01
.
.
.
=
⋅
, czyli 10 =
14
9
z = 0. 0643
z
Zatem
D( z) = 28
s + 0.0643
s + 0.01
b) t r
n
Poniewaz
, wiec sb
=
≤
→
≥
=
=
= − +
4 6
1 25
3 08
4
0 5
4
4 3
.
.
.
.
.
.
.
ξω
ξω
ξω
ξ
n
n
Niech
j
Potrzebny jest kompensator przy
śpieszający tzn. z <p ,który przesunie bieguny w lewo
− <
+
+
=
+
+
=
28
3
4
120
98 21
73 89
292 1
s s
s
o
o
o
(
)(
)
.
.
.
Biegun "p" i zero "z" nale
ży wybrać tak aby zachował warunek 292.1o +< p -< z =180o
< z - < p =112.1o
Niech np.z=0.6 ,czyli < z = 116.1o .Wtedy < p 4.0o ,czyli p= 100
Teraz k
s s
s
s
s
= −
+
+
+
+
(
)(
)(
)
.
3
6
100
0 6
/s
j
= − +
=
4
4 3
5160
Sprawdzenie Kv lims
→ ⋅ ⋅
0 s 5160
s + o.6
s(s + 3)(s + 5)(s + 100)
=1.68<10
Nale
ży więc dodać jeszcze korektor opóźniający
s
z o
s
p o
+
+
.Bior
ąc jak w (a) po=0.01
mamy10
1 68
0 01
0 06
=
⇒
=
.
.
.
zo
zo
,a wi
ęc wynik łączny
D z
s
s
s
s
( )
.
.
.
=
+
+
⋅ +
+
5160
0 6
100
0 06
0 01
Uwaga:. Przypadek (b) mo
żna również rozwiązać metodą eliminacji biegunów i zer biorąc
D z
k
s
s
s
p
s
p
( )
(
)(
)
(
)(
)
=
+
+
+
+
3
6
1
2
,wtedy
G otw s
k
s s
p
s
p
G otw s
( )
(
)(
)
( )
=
+
+
1
1
2
lub
=
1
s(s + p)2
dla uproszczenia
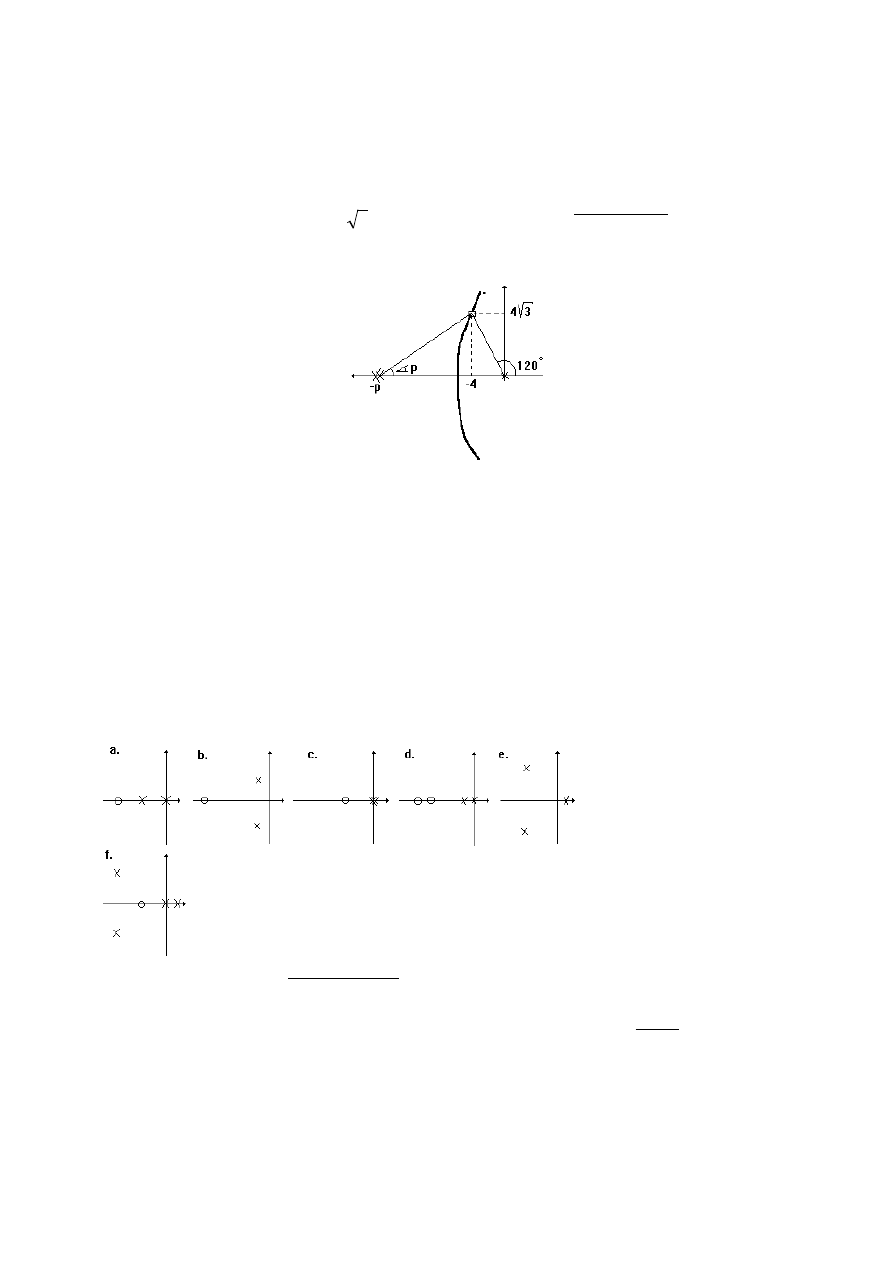
11
− <
=
+ < =
⇒
< =
G otw
o
p
o
p
o
120
2
180
30 . Zatem
p=16,
k
s s
= −
+
=
(
)
16 2
1536
-4+ j4 3
D z
s
s
s
( )
(
)(
)
(
)
=
+
+
+
1536
3
6
16 2
rys.
Zestaw VI. Zadania domowe.
1.Naszkicuj linie pierwiastkowe (orientacyjnie) dla nast
ępujących położeń biegunów i zer,
zaznaczaj
ąc asymptoty,kąty wejścia/wyjścia.
1.
2.Dane jest Gotw s
k
s
s s
s
( )
(
)(
)
=
+
−
+
2
1
6 2
.Czy układ zamkni
ęty nadaje się do pracy? Uzasadnij
na podstawie linii pierwiastkowych.Uzupełnij układ o kompensator D s
s
s
( )
= +
+
2
24
,który
wykazuje silne wła
ściwości różniczkujące.Jak teraz wyglądają linie?
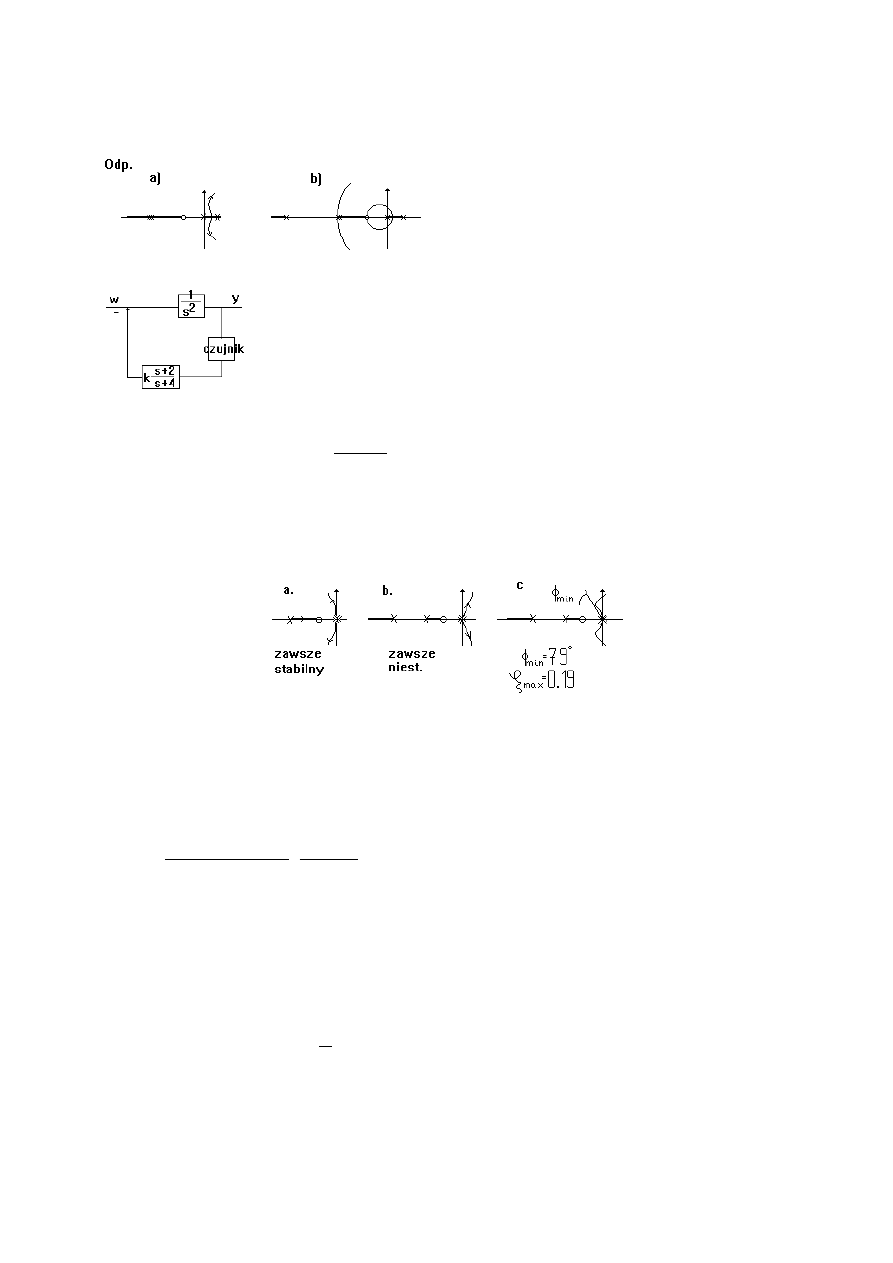
12
3.Układ sterowania rakiet
ą ma postać jak na rysunku.
a).Na podstawie linii pierwiastkowych uzasadnij,
że może on pracować
stabilnie przy doskonałych pomiarach (czujnik=1).
b).Załó
ż następnie ,że czujnik
s
=
+
1
0 1
1
.
(dodatkowa stała czasowa).Jak teraz wygl
ądają linie
pierwiastkowe ?Spróbuj ponownie dla stałej czasowej czujnika wynosz
ącej 0.01 sek.Jakie
wymagania powinien spełnia
ć czujnik w tym układzie?
Jakie maksymalne łumienie
ξ
mo
żna uzyskać w przypadku (a)?
r=rlocus(l,m,k);
[k'=.01,r(:,3)-atan(Imag(r(:,3))/real(r(:,3)))*180/pi]
4.
Nap
ęd przewijaka taśmy magnetycznej (komputer) ma transmitancję (obiekt)
G s
s
s
s
s
s
mm ms
A
o
( )
(
.
. )
(
)(
.
)
/
=
+
+
+
+
+
15
0 9
0 8
1
11
1
2
2
(czas w milisekundach)
Nale
ży wybrać sterownik zapewniający zerowy błąd ustalony pozycjonowania, czyli I lub PI,a
zarazem taki ,który pozwoli uzyska
ć
tn
ms
ms
czas
≤
≤
≤
4
15
10
,
%(
tr
, p%
narastania , czas regulacji
, przeregulowanie
, dokladnosc
2%).
W tym celu trzeba :
a).Dla sterownika I ,tj. R s
k
s
( )
=
wykre
ślić linie pierwiastkowe i sprawdzić czy można uczynić
zado
ść wymaganiom.
13
Odp.a) Nie, jedna para pierwiastków ma I>R, czyli mo
że spowodować p% >10%
b).Powtórzy
ć to samo dla sterownika PI,
.
k
s
s
+ α
, a nast
ępnie dobrać k,
a
. Jaka b
ędzie wartość
stałej uchybu Kv
w wynikowym układzie? Wskazówka : rozpocz
ąć od
α
α
=
1 (ewent.
= 0.5)
Zero
α
bliskie pocz
ątku układu "ściąga" linie na dół.
5. Zaprojektowa
ć regulator R(s), który spełni następujące wymagania :(1) błąd ustalony
odpowiedzi na skokowe zakłócenie z(t)=1(t) nie przekraczaj
ący 4/5, (2) współczynnik tłumienia
ξ =
=
0 707
4 3
.
. ).
( p%
Korzystaj
ąc
z metody linii pierwiastkowych nale
ży:
a). wykaza
ć, że regulator P nie będzie odpowiedni,
b).wykaza
ć, że regulator PD jest odpowiedni i określić jego nastawy.
Odp:(b) PD⇒ k s
(
)
+ α
,k=2.58,
α =
1 6
.
6. Regulator P steruje obiektem z opó
źnieniem (rys.) wyznaczyć linie pierwiastkowe dla
k
∈ −∞ ∞
(
, )
stosuj
ąc aproksymację Pade II rzędu
14
7.
Serwomechanizm ma posta
ć jak na rysunku. Dla każdego z wariantów projektowania podaj
wykresy linii pierwiastkowych i zaznacz wybrane bieguny układu zamkni
ętego(s )
a). Kompensator przy
śpieszający ("lead")
H(s)=1, D s
k
a
z
s
p
( )
=
+
+
≥
, gdzie p
6z
Dane projektowania: p
t r
s
%
% ,
.
<
<
25
0 55 (przyj
ąć np. p
t r
s
%
. % ,
.
)
=
=
16 3
0 4 .Ile wynosi
wtedy Kv? (stała uchybowa)
Odp. s
j
= − +
≥
10
10 3 ( = 60o Warunek p
6z
φ
).
wymaga wyboru odpowiedniego
"z"(dostatecznie du
żego); biorąc np. z=19 otrzymuje się p=60.5 oraz k=30612.Wtedy Kv=10.6
b).Sprz
ężenie pozycyjne i tachometryczne
H(s)=1,D(s)=k .Dane jak wy
żej .Wskazówka:KT dobrać z warunku fazy jak w korektorze "lead".
Odp.s j.w. KT=0.039 k=12340 Kv=22.4 Układ (b) jest korzystniejszy niż (?a) ze względu na
wi
ększe Kv(mniejszy uchyb).
c)Kompensator opó
źniający ("lag")
H(s) =1 D s
k
s
zo
s
po
( )
,
=
+
+
=
gdzie zo 1 (15-razy mniej niż pierwszy biegun)
Dane: p%
% ,
.
.
<
=
25
0 01
eu
Uwaga : W (a) było eu=0.094 a w (b) eu=0.044
Wskazówka: Najpierw zaprojektowa
ć układ bez korektora obliczając k. Określić Kv(bez
kor.).Potem dobra
ć po ,tak aby Kv(z kor.)=
1
100
eu
=
Odp. p
k
Kv bez
zo
po
po
%
.
,
(
. ,
.
=
→ =
=
⋅
=
→
=
16 3
4677
4677
550
8 5
4677
550
100
0 85
kor.) =
15
8. Dane jest Gotw s
k
s
z
s
p
s
s
( )
(
) (
)
=
+
+
⋅
+
+
1
2 2
4
.Wybra
ć k, z, p, aby biegun układu zamkniętego
znajdował si
ę w s = -2+j3(czemu odpowiada
ξ
ω
=
=
≅
≅
0 89
2 236
2 3
0 2
.
,
.
,
. ,
. % )
czyli tr
p%
n
.Dla uproszczenia przyj
ąć z=2
Odp. k=58.5 p=6.5 ("lead")
9. Zaprojektowa
ć D(s) dla układu podanego na rysunku, tak aby:
(1) p
k kryt
%
,
.
<
≤
≤
20
1
(2) t n
sek , (3) k
1
5
(5-krotny zapas wzmocnienia w stosunku do
granicy stabilno
ści).
przyj
ąć:
t
p
n
n
n
≈
→
=
=
→ =
18
2
16 3
0 5
.
.
.
%
ω
ω
ξ
Odp: D s
k
s
b
s
a
np b
( )
.
;
=
+
+
→
=
1 wtedy k = 24, a = 4
10.
Dany jest układ z regulatorem PI (rys.)Dobra
ć
α
tak, aby przeregulowanie wynosiło
10%(
. ).
ξ =
0 6 Jak wygl
ąda odpowiedż skokowa? (MATLAB)
Odp.
α ≅
10
11.
Serwomechanizm robota przemysłowego ma schemat jak na rysunku.Dla jakiego k przebiegi
maj
ą charakter aperiodyczny krytyczny? Jak oszacujesz wtedy tr?Dobierz
α
tak, aby tr było
równe o.25s.
16
Odp.
sb= -3
α
,
k
t r
=
= −
→
=
=
→ =
27
4
3
4
4 6
0 75
6 13
24 5
α
α
α
α
α
, snajbl.
.
.
.
.
12. Czas TI regulatora PI wybrano metodą eliminacji stałej czasowej, tj.TI=T.Dobrać kp tak aby
przeregulowanie było mniejsze ni
ż 20%. Ile wyniesie czasregulacji.
Wskazówka: Dokona
ć normalizacji czasu s'=sT
Odp.
k=0.32, t r
T
=
=
4 6
0 2
23
.
.
13. Do sterowania obiektem inercyjnym z opó
źnieniem
zastowano regulator PI: k
s
s
(
)
+
1
2
, eliminuj
ęc stałą czasową.
Oblicz k daj
ące przeregulowanie mniejsze niż 20%. Jeżeli
uchyb ustalony e
u
wyst
ąpi dla wymuszenia liniowego?
Wskazówka: Zastosuj aproksymacj
ę Pade' II rzędu.
14. Rami
ę robota skierowanego ku górze jest sterowane
przez regulator PID (rys.), o transmitancji k
s
s
s
(
)(
)
+
+
α
β
.
Dobierz k , ,
α β
tak, aby przebiegi były aperiodyczne
krytyczne, a czas regulacji wynosił 0.25s Dokonaj eliminacji
stałej czasowej (
α =
1)
15. Regulator PID: k
s
s
(
)
+
1
2
steruje oscylatorem
1
1
2
s
+
. Dla jakiego k przebiegi b
ędą
aperiodyczne krytyczne? Jak zmieni si
ę czas regulacji, jeśli transmitancją regulatora będzie
k
s
s
(
)
+ α
2
?.

17
Wyszukiwarka
Podobne podstrony:
Automatyka i Robotyka przykladowe zadania z rozwiazan (2)
przykładowe zadania i rozwiazania
przykład zadania rozwiązanego -funkcja linowa, ekonomia
przykladowe zadania rozwiazania 1
Przykladowe zadania z rozwiązaniami z statystyki
przykładowe zadania z rozwiązaniami (3)
Przykładowe zadania i rozwiązania (teksty literackie)
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
Zadania Ciągi liczbowe Politechnika Poznańska PP, Automatyka i Robotyka, Analiza matematyczna
Przykladowe zadania wraz z rozwiazaniami - finanse przedsiebiorstwa, WSFIZ pawia
MatLab ROZWIĄZANA lista na koło, Automatyka i robotyka air pwr, IV SEMESTR, MATLAB, Matlab zagadnien
Zadania rachunek różniczkowy Polutechnika Poznańska PP, Automatyka i Robotyka, Analiza matematyczna
ZADANIA WERSJA POPRAWIONA, Automatyka i Robotyka, SEMESTR 5, NEMAR, Nemar stary, nemar, nemar DUŻO,
2009 przykładowe zadanie z Kol 2 rozwiązanie zad 3
zadania 17.02, Energetyka, sem5, sem5, automaty, podstawy automatyki i robotyki
więcej podobnych podstron