
Spis treści
WYMIEŃ I OPISZ OBCIĄŻENIA WYSTĘPUJĄCE KONSTRUKCJI KADŁUBA ..................................... 3
WYMIEŃ I OPISZ SIŁY WEW. WYSTĘPUJĄCE W KONSTRUKCJI KADŁUBA .................................... 4
RODZAJE KOROZJI
Pod względem mechanizmu fizyko – chemicznego:
1. korozja chemiczna (utlenianie metalu) - zachodzi wskutek bezpośredniej reakcji chemicznej metalu z
otaczającym środowiskiem, której nie towarzyszy przepływ prądu elektrycznego.
2. korozja elektrochemiczna - zachodzi w roztworach elektrolitu oraz w atmosferze. Procesowi niszczenia materiału towarzyszy
lokalny przepływ prądu elektrycznego wskutek pracy obecnych na powierzchni metalu mikro – lub makroogniw korozyjnych.
Ze względu na charakter zniszczeń powodowanych przez korozję:
3. korozja równomierna – najbardziej powszechna forma występowania korozji ogólnej czyli korozji rozprzestrzenionej na całej
powierzchni metalu. Charakteryzuje się prawie jednolitym niszczeniem powierzchni.
4. korozja wżerowa – jedna z najniebezpieczniejszych form korozji miejscowej, czyli korozji lokalizowanej w
niektórych określonych miejscach powierzchni metalu. Przebiegając na niewielkich, niezbyt rozległych obszarach powierzchni
jednocześnie rozwija się znacznie w głąb materiału, tworząc tzw. wżery. Powoduje to istotne osłabienie lokalne konstrukcji
wskutek kilku do kilkunastokrotnie większej głębokości wżerów, od głębokości równomiernych ubytków korozyjnych na
pozostałych częściach powierzchni.
5. korozja punktowa – jedna z odmian wżerowej. Średnica zaatakowanych miejsc sięga 0,2 do 1 mm. Rozwijając się w głąb
metalu zniszczenia mogą z biegiem czasu spowodować rozszczelnienie zaatakowanego elementu.
6. korozja selektywna – występująca w stopach, prowadzi do znacznego obniżenia własności wytrzymałościowych metalu.
Składnikowo – selektywna charakteryzuje się wybiórczym roztwarzaniem jednego ze składników stopu.

7. korozja międzykrystaliczna – prowadzi do niszczenia materiału wzdłuż granic kryształów. Charakterystycznym objawem jest
znaczne pogorszenie własności mechanicznych metalu mimo jego pozornie nie zmienionego wyglądu.
8. korozja powierzchniowa – rozwija się w metalu równolegle do jego powierzchni i prowadzi do obserwowanego
niejednokrotnie pęcznienia lub rozwarstwiania się metalu.
9. korozja śródkrystaliczna – przejawia się wstępowaniem rys przebiegających poprzez ziarna metalu.
METODY OCHRONY PRZED KOROZJĄ
1. Ochrona za pomocą powłok malarskich: warunkami stosowania tej metody jest dobra przyczepność powłoki do metalu i jej
wysoka szczelność. Spełnienie tych warunków zależy od rodzaju i jakości nakładanych farb i od stanu powierzchni metalu.
Metody przygotowania powierzchni stalowych:
1) Czyszczenie ręczne i mechaniczne.
2) Piaskowanie i śrutowanie przy użyciu aparatów ciśnieniowych i bezpyłowych (odsysanie pyłu).
3) Trawienie w kwasach – usuwanie zgorzeliny oraz rdzy przez zanurzenie blach lub profili w kwasie o
odpowiednim stężeniu.
4) Czyszczenie płomieniowe – płomieniem tlenowo – acetylenowym. Ogrzanie powierzchni palnikiem, a następnie
dokładne szczotkowanie. Słaba skuteczność w usuwaniu zgorzeliny, wysoki koszt.
5) Czyszczenie elektrołukowe – ogrzewanie powierzchni metalu łukiem elektrycznym przy jednoczesnym mechanicznym
usuwaniu zanieczyszczeń i zgorzeliny, odłączonej wskutek nagłych zmian temperatury.
Farby okrętowe:
a) Farby gruntowe do ochrony czasowej.
b) Farby do części podwodnej kadłubów okrętowych – stosowane do ochrony zewnętrznego poszycia od korozji i od
porastania. Ochrona przed korozją części podwodnej jest trudna ze względu na dużą agresywność wody morskiej i trudności w
dokonywaniu remontów, odbywających się w dość długich odstępach czasu na doku.
c) Farby wodnicowe – stosowane w pasie zmiennego zanurzenia w obszarze dużego zagrożenia korozyjnego z powodu
oddziaływania silnie natlenionej wody morskiej i działania atmosfery.
d) Farby nadwodne – służą do malowania poszycia kadłuba powyżej pasa wodnicowego, nadbudówek, masztów, pokryw oraz
zrębnic lukowych. Znajdują także zastosowanie do malowania wewnętrznych powierzchni.
e) Farby zbiornikowe – wykazujące właściwości farb podwodnych, a ponadto odporność na działanie produktów naftowych,
nietoksyczność przy zastosowaniu do zbiornika wody pitnej, olejów jadalnych i innych środków spożywczych, odporność na
krótkotrwałe działanie pary wodnej lub alkaliów.
f) Farby różne i masy:
farby pokładowe: konserwacja pokładu i nadanie mu właściwości przeciwślizgowych,
farby do malowania chłodni i ładowni ryb,
emalie kabinowe,
emalie maszynowe,
masy do uszczelniania pokładów.
Technologia prac malarskich:
1. Przy użyciu pędzli,
2. przy użyciu wałków,
3. przy użyciu pistoletów:
a) o natrysku konwencjonalnym za pomocą sprężonego powietrza,
b) o natrysku hydrodynamicznym.
Kontrola jakości prac malarskich:
Ocena powłok malarskich polega na kontroli następujących własności:
1. Stopień wyschnięcia,
2. Przyczepność,
3. Ewentualna obecność takich wad jak: zacieki, zmarszczenia, ospowatość, nierównomierność pokrycia,
4. Grubość powłoki (elkometr magnetyczny).
2. Ochrona za pomocą powłok metalowych i nieorganicznych.
Przygotowanie powierzchni pod powłoki nieorganiczne i metalowe – występują różne metody w
zależności od sposobu nakładania danej powłoki ochronnej:
trawienie w kwasie siarkowym lub roztworze wodorotlenku sodowego,
piaskowanie.
Powłoki metalowe do ochrony:
części podwodnej – przy użyciu powłok cynkowych i aluminiowych,
elementów wyposażenia statku – przy użyciu powłok cynkowych, aluminiowych i kadmowych,
elementy armatury ,przyrządów, urządzeń i instalacji elektrycznych – przy użyciu powłok cynkowych, kadmowych, srebrnych.
Metody pokrywania:
metoda ogniowa, polegająca na zanurzeniu do roztopionego metalu,
metoda galwaniczna (armatory, przyrządów, drobne elementy wyposażenia),
metoda natryskowa.
Powłoki nieorganiczne powłoki otrzymane wskutek reakcji metalu z odpowiednimi związkami chemicznymi przy wytwarzaniu
trudno rozpuszczalnej soli lub tlenku tegoż metalu. Metody to:
fosforowanie,
chromianowanie,
chemiczne utlenianie : czernienie żelaza, oksydowanie aluminium i jego stopów, czernienie miedzi i jego stopów.
3. Ochrona elektrochemiczna.

Metody ochrony elektrochemicznej są jedną z najbardziej skutecznych form zabezpieczania metali przed korozją, przy ich
użytkowaniu w warunkach stałego zanurzenia w roztworach elektrolitów. Przy pierwszym podziale rozróżnia się:
ochronę anodową,
ochronę katodową.
Ochrona anodowa polega na anodowej polaryzacji konstrukcji i nie jest dotychczas stosowana w przemyśle okrętowym stosuje
się ją do ochrony aparatury chemicznej.
Ochrona katodowa wykorzystująca zjawisko polaryzacji katodowej jest szeroko stosowana poprzez szereg swoich wariantów do
ochrony i ich wyposażenia.
W jej obrębie dokonuje się dalszego podziału wg użytego źródła prądu na:
ochronę za pomocą zewnętrznego źródła prądu,
- z regulacją automatyczną,
- z regulacją ręczną.
ochronę za pomocą anod galwanicznych,
ochrona drenażowa.
4. Inne metody ochrony przeciwkorozyjnej:
a) Powłoki z tworzyw sztucznych (polimerów) nakładane zwykle metodą natryskową ( płomieniową lub bezpłomieniową),
b) Za pomocą olejów i smarów – na czas transportu silników lub innych maszyn,
c) Konserwacja bezsmarowa – zanurzenie w kąpieli przeciwkorozyjnej typu W – 5,
d) Powłoki zdzieralne z tworzyw sztucznych,
e) Obniżenie wilgotności powietrza w zbiorniku lub zmniejszenie dostępu tlenu.
Metody te są stosowane do ochrony zbiorników rozładowanych lub też do ochrony części powierzchni zbiornika
znajdującego się na produktem naftowym. Metoda:
Poprzez obniżenie wilgotności powietrza, które można dokonać dwoma sposobami: przez wtłaczanie do zbiorników powietrza o
niskiej wilgotności lub przez wtłaczanie gorącego powietrza o nieregularnej wilgotności,
Poprzez zmniejszenie zawartości tlenu w zbiorniku
f) zastosowanie inhibitorów.
WYMIEŃ I OPISZ SIŁ ZEW. DZIAŁAJĄCE NA STATEK
Siły zewnętrzne działające na statek możemy podzielić ze względu na sposób ich oddziaływania na elementy konstrukcji, na
następujące:
1. siły powierzchniowe dzielą się na :
aeromechaniczne, które z uwagi na sposób oddziaływania tej siły dzielą się na:
aerostatyczne (nie zależą od czasu),
aerodynamiczne (zależą od czasu, różnicy ciśnień, przejawiają się w postaci wiatrowania. Dzielą się one na:
średnie (średni moment przechylający, moment obracający, siła dryfu, siła dodatkowego oporu),
zmienne.
Hydromechaniczne, które dzielą się na:
Hydrostatyczne (siły wyporu siły przywracające – odpowiadają za powrót statku do początkowego stanu równowagi, moment
prostujący),
Hydrodynamiczne, które przedstawia się na dwa sposoby:
siły guasistatyczne,
siły jawne dynamiczne, które dzielą się na:
— radiacyjne,
— wymuszające.
2. siły masowe (są związane z ciężarem ładunku), dzielą się na:
siły ciężkości ładunków, kadłuba, zapasów działające w sposób statyczny,
siły bezwładności tych ciężarów występujące przy niejednostajnych ruchach statku (dynamiczne).
3. siły skupione (działające na wybrane części) – do tych sił zalicza się : napór pędnika, siła trzymania kotwicy, siła podparcia na
mieliźnie.
WYMIEŃ I OPISZ OBCIĄŻENIA WYSTĘPUJĄCE KONSTRUKCJI KADŁUBA
Kadłub statku podczas budowy i eksploatacji jest poddawany różnorodnym obciążeniom wywołanym przez siły zewnętrzne,
wśród których wyróżniamy:
Obciążenia statyczne występujące w wyniku działania sił statycznych,
Obciążenia dynamiczne występujące w następstwie działań sił dynamicznych.
Dzielą się na:
Obciążenia dynamiczne – wolnozmienne – są najtrudniejsze do opisania; występują w trakcie eksploatacji statku i wynikają z
działania środowiska morskiego na statek (falowanie), takie obciążenia przestawia się w postaci funkcji losowej.
Obciążenia dynamiczne – szybkozmienne – są wywołane drganiami i wibracjami kadłuba oraz układu napędowego statku.
Powstają w wyniku slemingu – część dziobowa statku uderza o falę, w wyniku pracy urządzeń na statku, silnika agregatu.
Określenie pełnego stanu obciążenia jest zagadnieniem bardzo skomplikowanym. Większość stanu obciążeń występuje w trakcie
eksploatacji statku na morzu, dotyczy to szczególnie obciążeń dynamicznych. Analiza obciążeń dynamicznych jest najbardziej
skomplikowana. Wielkość i zakres występowania tych obciążeń nie zawsze jest do końca znany. Dlatego w wypadkach, gdy
model dynamiczny jest nieznany, stosuje się przede wszystkim statyczne modele obciążenia, a gdy jest to konieczne uwzględnia
się dodatkowo obciążenia dynamiczne, przez zastosowanie odpowiednich współczynników. Gdy tych czynników jest wiele, w
takich przypadkach uwzględnia się obliczenia znormalizowane (projektowe): obciążenia hydrostatyczne kadłuba na wodzie
spokojnej, lub na fali standardowej, obciążenia pokładu po zalaniu go obliczeniową warstwą wody, obciążenia od naporu wiatru,
masy lodu na pokładzie.
W analizach wytrzymałościowych obciążenia te mogą być traktowane jako:
Obciążenia lokalne – działające na wybrane części kadłuba statku, obciążenia dna ładowni ładunkiem obciążenia pokładu –
ładunek na pokładzie, np. kontenery,
Obciążenia ogólne – działające na kadłub, traktowane jako całość, wykorzystuje się model obliczeniowy, analogiczny do
modelu wykorzystywanego do obliczenia wytrzymałości belki sprężystej.
Wyróżniamy wytrzymałość lokalną i ogólną, na które ma wpływ siła ciężkości i ładunku. Efektem oddziaływania obciążeń na
kadłub statku są siły wewnętrzne, w wyniku których mamy siły tnące i gnące.
WYMIEŃ I OPISZ SIŁY WEW. WYSTĘPUJĄCE W KONSTRUKCJI KADŁUBA
Siły wewnętrzne-Statek jest obiektem nieskończenie sztywnym tzn. zachowującym swój kształt przy działaniu sił zewnętrznych,
w ograniczonej wartości. Po przekroczeniu pewnego poziomu tych sił, naprężenie w materiale konstrukcyjnym statku, przekracza
wartości graniczne i statek ulegnie trwałemu odkształceniu, niszczeniu.
Wewnątrz elementów konstrukcyjnych statku występują siły spójności między cząsteczkami materiału, wypadkowe tych sił to siły
wewnętrzne.
W konstrukcji przyjęto, że siły wewnętrzne nazywa się tą część sił międzycząsteczkowych, która stanowi reakcję na działanie sił
zewnętrznych.
Przy rozpatrywaniu wytrzymałości ogólnej kadłuba siły wewnętrzne określa się dla przekrojów poprzecznych kadłuba statku. Dla
dowolnego przekroju poprzecznego można je zapisać jako uogólnione siły (wyznaczyć siły z momentu sił), które należy przyłożyć
w tym przekroju zamiast usuniętej części kadłuba by druga jego część pozostawała w równowadze.
Px – siła osiowa w kierunku normalnym do powierzchni,
Ty · Tz - siły styczne (siły tnące)
Mx – moment w płaszczyźnie przekroju (moment skręcający)
Mg, Mz – momenty zginające
Spośród wszystkich sił wewnętrznych analizy w aspekcie ogólnej wytrzymałości statku bierze się pod uwagę:
- siły tnące Tz (Shear Force),
- moment zginający Mg (Mg – bending Moment),
- moment skręcający Mx (Ms – Torsional Moment).
Te siły i momenty zależą od ładunku. Efektem oddziaływania sił wewnętrznych są naprężenia.
Naprężenie.
Naprężenia konstrukcyjne zależą od sił wewnętrzny oraz od kształtu i geometrii przekrojów wręgowych. Wyróżniamy naprężenia:
- styczne τ (tał),
- normalne (sigma)
Te naprężenia są miarą wytrzymałości kadłuba.
τ = Us / W0 [Pa], gdzie:
W0 – osiowy wskaźnik wytrzymałości kadłuba zależny od kształtu wręgu (wzdłuż osi x)
σ = Uy / Wy [Pa],
gdzie:
Wy – wskaźnik przekroju obliczony względem osi Y
Naprężenia są miarą sztywności kadłuba.
Konstrukcja statku musi być tak zaprojektowana i statek musi być tak załadowany, aby te naprężenia nie przekroczyły wartości
dopuszczalnej. Te wartości dopuszczalne zależą od właściwości materiału. Przekroczenie dopuszczalnych natężeń spowoduje
nieodwracalne zniszczenie materiału, a tym samym konstrukcji statku.
τ ≤ τ dopuszczalne
σ < σ dopuszczalne
W oparciu o dopuszczalne naprężenia jest możliwe wyznaczenie dopuszczalnych sił wewnętrznych i wtedy kontrola
wytrzymałości może być realizowana w oparciu o obliczone siły wewnętrzne.
PRZEDSTAW PROCEDURĘ OBLICZANIA SIŁ TNĄCYCH I MOMENTÓW ZGINAJĄCYCH DLA STATKU NA WODZIE
SPOKOJNEJ
Spośród wszystkich sił zewnętrznych działających na statek w tym modelu obliczeniowym, uwzględnia się jedynie statyczne
wartości siły ciężkości i wyporu.
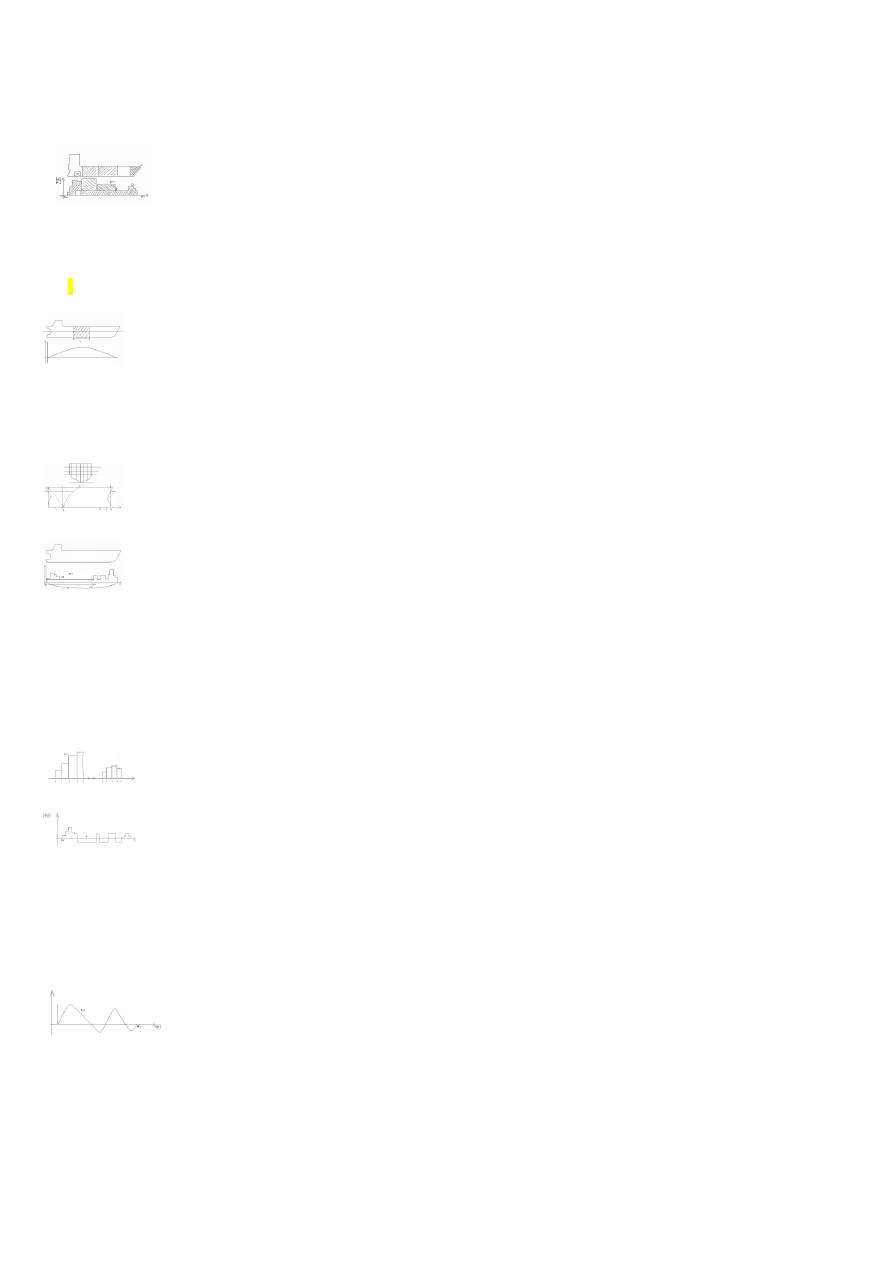
W analizie wytrzymałości wzdłużnej uwzględnia się rozkłady tych sił po długości statku. Te rozkłady przedstawia się w postaci:
rozkładu ciężaru kadłuba p(x) – „krzywa ciężaru”,
rozkładu wyporu W(x) – „krzywa wyporu”.
a) krzywa ciężaru.
Rozkład ciężaru statku składa się z :
rozkład ciężaru statku pustego,
rozkładu ciężaru ładunku,
rozkładu ciężaru zapasu,
inne ciężary.
Rozkład ciężaru statku pustego jest opracowywany przez biuro konstrukcyjne stoczni i zapisany w informacji wytrzymałości dla
kapitana statku, np.: 100kN/10m = 10 Kn/m
∫ p(x) dx = P
P - ciężar
Następnie nanosi się pozostałe ciężary:
b) krzywa wyporu
Ilustruje ona rozkład działania siły wyporu wyposażenia statku.
W = Vt • k • ς • g
W / l = Vc • k • ς • g
Fwv
W(x) = FWx (x) • k • ς • g [kN/m]
W(x) = FWx (x) • 1 • γ [T/m]
1 γ [T/m²]
Pola powierzchni wrężnic zależą od statku.
Pola powierzchni wręgów odczytuje się ze skali Bonjean’a.
Skala umożliwia zobrazowanie krzywych pól wrężnic. W oparciu o nią oblicza się krzywą wyporu i objętości podwodzia.
Xg – środek wyporu,
Xb – odcięta środka wyporu
Xb = Xg
Warunki równowagi:
P = W → ∫p(x)dx = ∫w(x)dx
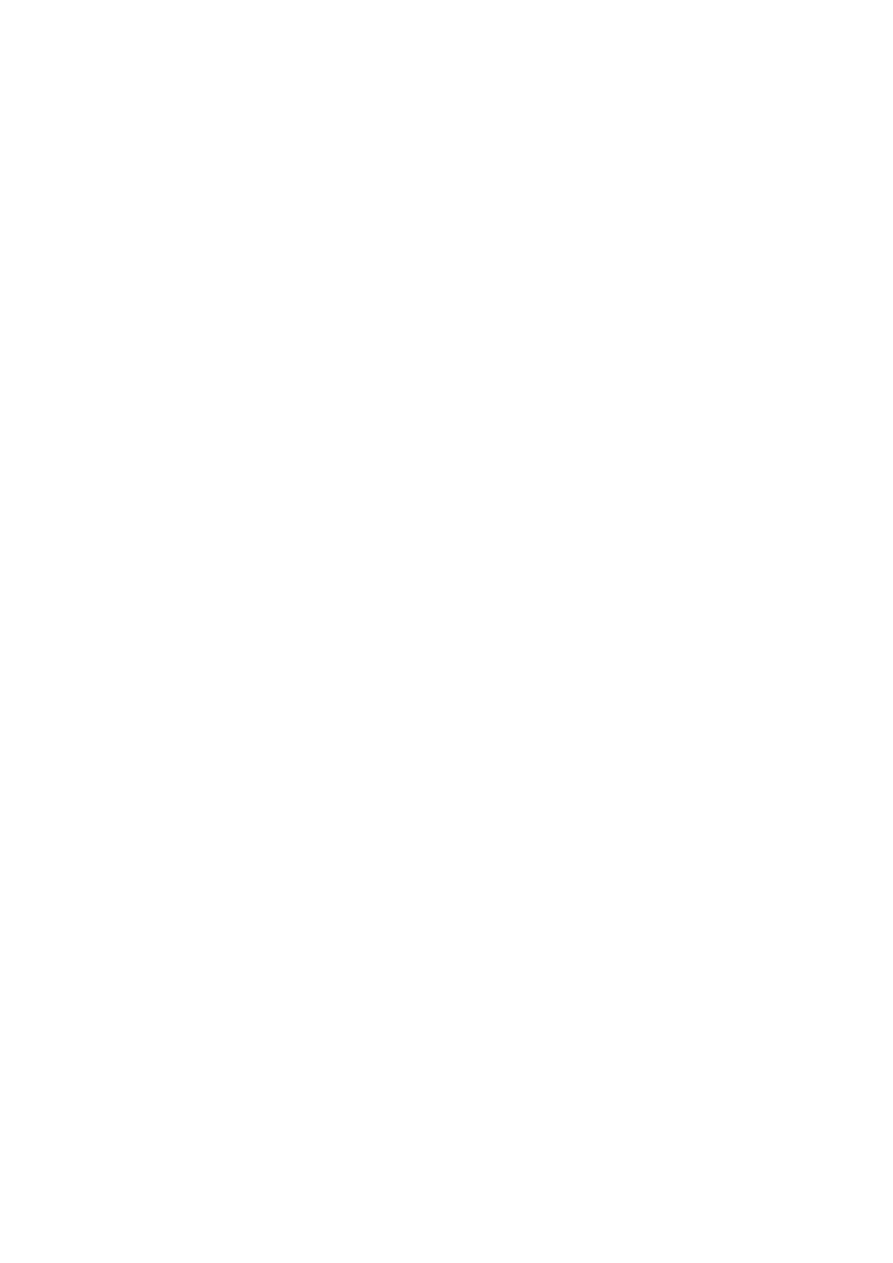
g(x) = p(x) + w(x)
g(x) – krzywa obciążeń
∫g(x)dx = T (α) T (α) - siła tnąca
∫T(x)dx = 0
Krzywa sił tnących wartości ekstremalnych osiąga w punktach, w których siła obciążeń zmienia swój znak. Takimi miejscami na
statku są grodzie poprzeczne, które rozdzielają nierównomiernie zapełnione przedziały ( w sytuacjach ekstremalnych przedział
pusty i pełny). Z uwagi na to, że siły tnące są największe na grodziach, dlatego w tych miejscach skraca się ich dopuszczalne
wartości.
Mg (α) = ∫T(x)dx = - ∫T(x)dx
Przedstaw procedurę oceny wytrzymałości ogólnej i lokalnej kadłuba w aspekcie załadunku statku
Kontrola Wytrzymałości kadłuba przebiega schematycznie:
Sprawdzenie wytrzymałości kadłuba planuje się przed załadunkiem statku i opracowuje się sekwencję załadunku statku
bezpieczną pod kątem wytrzymałości ogólnej i lokalnej.

Procedura załadunku składa się z kilku etapów:
Dopuszczalne wartości sił wewnętrznych oblicza się w oparciu o przepisy klasyfikacyjne i umieszcza się w dokumentacji statku.
Obliczenia wytrzymałości przeprowadza się w dwóch etapach eksploatacyjnych:
W porcie (port condition),
W morzu (seagoing conditio).
Wartości sił wewnętrznych w obu tych stanach są obliczane według identycznego modelu statku na wodzie spokojnej. To jest taki
model, w którym bierze się pod uwagę statyczne wartości sił ciężkości i wyporu bez uwzględnienia falowania.
Natomiast wpływ falowania określa się jedynie w dopuszczalnych siłach wewnętrznych. Oznacza to konieczność rozdzielenia
wartości dopuszczalnych sił wewnętrznych na dwie grupy kryteriów:
Wartości dopuszczalne sił wewnętrznych w porcie,
Wartości dopuszczalne sił wewnętrznych w morzu.
To uproszczenie wynika ze zbyt skomplikowanego wyznaczania sił wewnętrznych w warunkach rzeczywistego falowania na
morzu.
Opisz konstrukcję i zasadę działania kotwicy z poprzeczką i kotwicy patentowej.
Halla – najpowszechniejsza (patentowa, bezpoprzeczkowa), K = 3 – 5, kąt odchylenia ramion 45˚, ramiona odlewane ze staliwa,
trzony kute, masa ramion co najmniej 60% masy kotwicy, spotykane wielkości 50 – 20 000 kg, dla statku o nośności 50 000 t –
ok. 10 t. Zaletą kotwicy Halla jest łatwość umieszczenia w kluzie i gotowość do natychmiastowego użycia.
O zwiększonej sile trzymania – Matrosowa, Danfortha, AC 14, Stokesa, LWT, Union bhp itd. O współczynniku siły trzymania
co najmniej dwukrotnie większym niż kotwica Halla o tej samej masie, K = 10 – 50. Wielkości ograniczone ze względu na
wytężenie konstrukcji charakteryzującej się cieńszymi przekrojami i rozłożystymi kształtami. Spotykane wielkości 20 – 1500 kg.
Przepisy Instytucji Klasyfikacyjnej pozwalają przy zastosowaniu kotwic o zwiększonej sile trzymania na zmniejszenie masy
kotwicy jedynie o 25% w stosunku do masy wymaganej dla danego statku kotwicy Halla ze względu na konieczność zachowania
odpowiedniego kalibru i tym samym masy łańcucha dla właściwego zachowania się statku przy postoju na kotwicy. Stosowane
przede wszystkim na mniejszych statkach.
Opisz konstrukcję łańcucha kotwicznego.
Zalecany stosunek długości łańcucha do głębokości kotwiczenia wynosi 5 – 8 co, przy długości łańcucha wymaganego przez PRS
dla największych statków wynoszącej do 350 m, określa głębokość kotwiczenia na 40 – 60 m. Łańcuchy wykonywane są ze stali:
1.
O zwykłej wytrzymałości – R
e
= 305 – 490 Mpa (do kalibru 132 mm).
2.
O podwyższonej wytrzymałości – R
e
= 490 – 690 Mpa (do kalibru 152 mm).
3.
O wysokiej wytrzymałości – R
e
>690 Mpa (od kalibru 20,5 mm).
Skład łańcucha kotwicznego:
- przęsło kotwiczne,
- przęsła pośrednie (długość 25 – 27,5 m) – ich ilość zależna od długości łańcucha,
- przęsło komorowe
Podstawowy element – ogniwo zwykłe rozpórkowe dla D > 15 mm (bezrozpórkowe dla mniejszych). Poza tym:
- ogniwa duże rozpórkowe,
- ogniwo końcowe,
- szakla pośrednia lub łącznik Kentera,
- krętlik – w przęśle kotwicznym, zabezpieczający łańcuch przed skręceniem,
- szakle końcowe – na końcach łańcucha.
D- kaliber łańcucha to średnica pręta z którego zostało zrobione ogniwo zwykłe.
Oznakowanie łańcucha – maluje się za złączami kolejnych przęseł na biało ilość ogniw odpowiadającą ilości przęseł w stronę
kotwicy (plus opaski z drutu benclowego). Nowoczesne wciągarki – licznik wydanego łańcucha.
3.Rodzaje i konstrukcja wciągarek kotwiczno-cumowniczych.
1. Z poziomym wałem (kąt opasania koła łańcuchowego115 - 120˚).
-
Jednołańcuchowe (jeden silnik napędza jedno koło łańcuchowe),
-
Dwułańcuchowe (jeden silnik napędza dwa koła łańcuchowe).
2. Z pionowym wałem – kabestany kotwiczno-cumownicze (kąt opasania 150 - 180˚). Silnik i przekładnia znajduje się pod
pokładem.
Wybór zależy od wielkości statku, kształtów burty w obrębie wylotów kluz i pozostającego do dyspozycji miejsca.
Napęd, niegdyś parowy, obecnie najczęściej elektryczny, bywa też hydrauliczny.
Elementy składowe elektrycznej wciągarki kotwicznej:
- silnik napędowy,
- przekładnia mechaniczna (ślimakowa, koła zębate lub kombinacja obu),
- wał koła łańcuchowego (z kołem łańcuchowym i sprzęgłem pozwalającym na rozłączenie koła łańcuchowego od napędu),
- hamulec taśmowy opasany na walcowej powierzchni przy kole łańcuchowym,
- głowica cumownicza (nie zawsze), mocowana na wale koła łańcuchowego lub niezależnym.

- Wyposażenie wciągarki obejmuje ponadto kolumienkę sterowniczą oraz skrzynkę stycznikową (umieszczoną w
pomieszczeniu zamkniętym statku).
Wciągarka kotwiczna może być wykorzystywana do celów cumowniczych, lecz coraz częściej zespół do opuszczania i
podnoszenia kotwicy instalowany jest jako przystawka do właściwej wciągarki cumowniczej.
Koło łańcuchowe posiada specjalny kształt z odpowiednimi występami – gniazdami. Przy większym kącie opasania liczba
tych gniazd może być mniejsza (mniejsza średnica koła). Łańcuch w każdym położeniu musi zaczepiać co najmniej o dwa
występy. Koło łańcuchowe musi mieć minimum 5 gniazd.
Prędkość podnoszenia (PRS) 9 – 12 m/min (wyjątkowo większa), w końcowej fazie podnoszenia stosuje się mniejsze
prędkości. Prędkość podnoszenia przy wciąganiu kotwicy do kluzy powinna wynosić max. 10 m/min, zaleca się nie więcej niż 7
m/min.
Uciąg określa się biorąc największą siłę w łańcuchu (przy odrywaniu kotwicy) i dodając około 20% na tarcie łańcucha
kotwicznego o kluzę, stopery itp.
Przepisy PRS wymagają takiej mocy wciągarki kotwicznej aby średnia prędkość wybierania jednego łańcucha była nie
mniejsza niż 9 m/min (0,15 m/s), przy sile uciągu nie mniejszej niż P = 36,8 – 46,6D
2
[N], w zależności od kategorii łańcucha.
D[mm] – kaliber.
Wymaga się aby napęd wciągarki przy unieruchomionym łańcuchu powodował siłę uciągu nie mniejszą niż 2P.
Wciągarka powinna posiadać sprzęgło rozłączne zainstalowane pomiędzy kołem łańcuchowym a wałem napędowym.
Silnik elektryczny powinien posiadać samoczynnie działające hamulce unieruchamiające wał napędowy w wypadku
wyłączenia napięcia lub awarii silnika.
Koło łańcuchowe powinno być wyposażone w hamulec utrzymujący łańcuch bez poślizgu przy obciążeniu równym 45%
obciążenia zrywającego łańcuch.
Przeznaczenie i zasada działania stopera i zwalniaka łańcucha kotwicznego.
Zwalniak łańcucha kotwicznego- mechanizm do którego zamocowane jest ostatnie ogniwo łańcucha. Służy do awaryjnego
odłączenia łańcucha. Obciążenie zwalniaka = 0,2 obciążenia zrywającego łańcuch. Rodzaje:
- klinowy,
- szczękowy.
Przepisy wymagają aby łańcuch kotwiczny mógł być odłączony spoza komory z łatwo dostępnego miejsca (pokład).
Stopery lin cumowniczych – zabezpieczają linę przed ześlizgnięciem się na nabrzeże podczas zdejmowania jej z głowicy
wciągarki i obkładania na pachole (stopery linowe).
Wymień i opisz urządzenia cumownicze.
1. Liny cumownicze.
- stalowe, najczęściej sześciosplotkowe,
Według PRS liny muszą spełniać określone wymagania:
- konstrukcja liny powinna zapewnić jej elastyczność,
- dla odpowiedniej siły zrywającej – określona ilość drutów, splotów, rdzeni:
liny stalowe używane do nawijania na bębnie wciągarki cumowniczej (na wciągarkach o regulowanym naciągu) mogą mieć rdzeń
z drutu stalowego, ale liczba drutów musi wynosić nie mniej niż 216,
- do wyrobu lin używa się drutu o określonej w przepisach wytrzymałości,
- liny nie powinny rozkręcać się po zdjęciu zakończenia lin,
- druty ocynkowane i pokryte smarem chroniącym przed korozją.
Liny stalowe podlegają próbom na rozciąganie (zerwanie), skręcanie i przeginanie. Sprawdzana jest także wytrzymałość, grubość i
przyczepność powłoki cynkowej.
Lin stalowych nie wolno stosować na zbiornikowcach w obrębie zbiorników ładunkowych i na tych pokładach, na których
prowadzone są rurociągi ładunkowe.
- włókienne, skręcane lub plecione,
- wykonane z włókien, z których skręca się nitki, z nitek pokrętki (skręt w przeciwną stronę), z pokrętek linę (przeciwny skręt),
spotyka się liny trójpokrętkowe i czteropokrętkowe,
- liny plecione (jak warkocz) – mają mniejszą wytrzymałość od lin skręcanych o takim samym przekroju ale także mniejszą
rozciągliwość.
Włókna naturalne: manilowe, konopne, sizalowe, kokosowe, bawełniane (rzadko stosowane obecnie).
Włókna sztuczne: polipropylenowe, nylonowe, stylonowe – materiał musi mieć odpowiednią wytrzymałość na rozciąganie. Przy
zastosowaniu lin z tworzyw sztucznych ich wymagana przez Instytucje Klasyfikacyjne wytrzymałość jest większa niż lin z
włókien naturalnych. Według PRS siła zrywająca liny z włókien sztucznych F
s
:
F
s
= 0,16·δ
s
· F
n
8/9
[N], gdzie: F
n
– siła zrywająca liny z włókien naturalnych dobierana według wskaźnika wyposażenia z tabeli, δ
s
– średnie wydłużenie liny z włókien sztucznych w % (min. 30%).
Masa przypadająca na jednostkę długości (masa właściwa) – wskaźnik za pomocą którego porównuje się liny włókienne.

Charakterystyka liny zawiera parametry: masa właściwa, trwałość, wytrzymałość na rozciąganie, wytrzymałość na węzeł,
wytrzymałość na pętlę, elastyczność, chłonność wody, wpływ temperatury, wpływ światła słonecznego, wpływ chemikaliów,
wody morskiej, odporność na bakterie i insekty. Dla określenia tych cech istnieją odpowiednio ustalone próby.
1.
Wciągarki cumownicze - napęd elektryczny lub napęd hydrauliczny.
Na dziobie stosuje się wciągarki kotwiczne wyposażone w głowice cumownicze, wciągarki cumownicze wyposażone w dołączany
zestaw kotwiczny lub wciągarki cumownicze niezależne.
Na rufie stosuje się kabestany kotwiczno-cumownicze – do obsługi kotwicy prądowej, kabestany cumownicze – tylko głowica
cumownicza lub też wciągarki cumownicze o poziomej osi obrotu – z długim wałem, pozwalającym na wysunięcie głowicy poza
gabaryt nadbudówki.
Kabestany mogą przyjąć linę z dowolnego kierunku, wciągarki poziome wymagają użycia rolek kierujących, aby oś nabiegu liny
na bęben była prostopadła do osi obrotu wciągarki.
Prędkość wybierania liny przez wciągarki cumownicze przy nominalnym uciągu (wg PRS) max 18 m/min (o,3 m/s), a przy
wybieraniu liny nieobciążonej do 60 m/min.Po dociągnięciu statku do nabrzeża liny cumownicze zostają zamocowane do
pachołów znajdujących się na statku, o ile statek nie jest wyposażony we wciągarki o regulowanym naciągu. W przypadku
zastosowania zwykłej wciągarki, jeżeli statek zmieni położenie względem nabrzeża na skutek zwiększonego naporu wiatru lub
prądu, bądź na skutek zmiany zanurzenia przy załadunku, lub na skutek pływów, liny cumownicze należy odpowiednio luzować
lub wybierać.
Wciągarka o regulowanym naciągu samoczynnie dokonuje tych czynności w zakresie wybranych nastaw siły uciągu, który jest
inny dla springów, a inny dla brestów. Maksymalny uciąg wciągarki nie może być większy niż 1/3 minimalnej wytrzymałości liny
na rozerwanie, a hamulec wciągarki powinien być tak dobrany, aby utrzymywał naciąg liny odpowiadający 80% wytrzymałości
liny na rozerwanie.
2.
Pachoły – do zamocowywania liny po zdjęciu z wciągarki. Pojedyncze krzyżowe. Podwójne proste, krzyżowe i ukośne.
3.
Przewłoki – do kierowania liny ze statku na nabrzeże. Wargowe, wargowo-rolkowe, rolkowe (jedno-, dwu-, trzy-,
czterorolkowe, z poziomą rolką zabezpieczającą, z rolkami walcowymi)
4.
Kluzy cumownicze- kierują linę ze statku w dowolnym kierunku.
- Wolnostojące i montowane w nadburciu.
- Stałe i otwierane.
- Owalne i okrągłe.
- Uniwersalne z rolkami prowadzącymi.
5.
Rolki kierujące – kierują linę na bęben wciągarki pod kątem prostym do jego osi obrotu.
6.
Stopery lin cumowniczych – zabezpieczają linę przed ześlizgnięciem się na nabrzeże podczas zdejmowania jej z głowicy
wciągarki i obkładania na pachole (stopery linowe).
7.
Bębny linowe, gretingi – do magazynowania lin.
Opisz typowe konstrukcje żurawi bomowych lekkich i ciężkich
żurawie bomowe – dźwigowe urządzenia przeładunkowe utrzymujące i przemieszczające ładunek za pomocą bomu i
systemu lin oraz bloków zamocowanych do masztów, kolumn, pokładów itp.,
Osprzęt zdejmowalny – bloki, haki, łańcuchy, szakle, krętliki, ściągacze i inne części zamocowane do ustrojów ładunkowych, lin
lub do innych części za pomocą połączeń rozłącznych z wyjątkiem części osprzętu stałego (zaczepów topenantowych, łożysk
bomów, krążków wewnętrznych bomów).
- lekkie – o udźwigu pojedynczego bomu do 10 t, montowane parami, ich podstawowym rodzajem pracy jest praca bomami
sprzężonymi, podstawowe elementy to maszt lub kolumna, system olinowania:
- topenanta – wysięg bomu (kąt nachylenia),
- rener – lina ładunkowa- podnoszenie ładunku,
- gaje – obrót bomem (sztender + talia)
- profender – stosowany do unieruchomienia bomu przy pracy bomami sprzężonymi.
Specjalne układy olinowania lekkich żurawii bomowych:
a) Ebela. Odpowiedni układ gai umożliwia samoczynne podnoszenie się noku bomu w płaszczyźnie pionowej przy przekroczeniu
określonego naciągu w renerze powodującego wzrost naciągu w gai. Podniesienie trwa tak długo dopóki nie zmniejszy się naciąg
renera (np. przez opuszczenie podnoszonego ciężaru).
b) Farrela. Dzięki zamocowaniu gai w jednej poprzecznej linii z łożyskami bomów, nok bomu jest przemieszczany w pionowej
płaszczyźnie równoległej do płaszczyzny symetrii statku.
- ciężkie – o udźwigu ponad 10 t, montowane i pracujące jako pojedyncze; mogą występować przy lekkich żurawiach – udźwig
do 50 t lub niezależnie, dla ładowni przeznaczonych wyłącznie do ciężkich ładunków – udźwig nawet do 300 t.
Cechy charakterystyczne ciężkich żurawi bomowych:
- są montowane i pracują wyłącznie pojedyńczo,
- są montowane w łożyskach pokładowych w P.S.
- mogą pracować z obu burt,
- talie zarówno w układzie renera jak i topenanty,
- jeżeli posiadają gaje, to są wyposażone we wciągarki gajowe,
- układy dwutopenantowe, eliminujące gaje,
- zmiana wysięgu bomu również pod obciążeniem.
Rodzaje ciężkich żurawii bomowych:
1. Z tradycyjnym układem olinowania – wodzone gajami (typu: Norwinch, Hatlapa).
2. Dwutopenantowe – bez gai (Stulckena, Wella, Hallena, MO-SLEWING).
a) Stulckena. Niektóre żurawie bomowe mogą obsługiwać dwie sąsiednie ładownie – warunek – olinowanie pozwala na
przerzucenie bomu znad jednej ładowni nad drugą. Ciężki żuraw bomowy Stulckena służy do przeładunku najcięższych
ładunków.
- bom umieszczony pomiędzy dwoma rozchylonymi masztami,
- układ dwutopenantowy,
- zaczepy bloków topenant umieszczone na obrotowych uchwytach,
- łożysko pokładowe o specjalnej konstrukcji
- w układzie renera talia podwójna i co za tym idzie dwie wciągarki ładunkowe.
b) Wella, układ dwutopenantowy, jedna wciągarka ładunkowa i dwie topenantowe dwubębnowe.
- A - do zmiany nachylenia bomu,
- B - do przemieszcenia (obrotu) bomu w poziomie,
Obrót i zmiana wysięgu tylko pod obciążeniem. Nie zachodzi konieczność synchronizacji dwu wciagarek.
Bom z olinowaniem Wella może być zastosowany przy maszcie o typowej klasycznej konstrukcji.
c) Hallena – rozwiązanie opiera się również na olinowaniu z podwójną topenantą.
Na skutek możliwości poziomego przesuwania się punktów zaczepienia bloków topenanty umieszczonych na zawiasowych
wspornikach uzyskuje się korzystniejsze położenie tych punktów przy przemieszczaniu bomów w płaszczyźnie poziomej. Inne
rozwiązania żurawia Hallena umożliwiają poziome przesunięcie pięty bomu w poprzek statku co daje podobne efekty.
d)MO-SLEWING – dwie zaczepione do nadburcia topenanty przechodzą przez bloki umieszczone na noku bomu i bloki
umieszczone na topie masztu. Takie rozwiązanie daje zwiększony kąt obrotu na burtę.
W jaki sposób wyznacza się wskaźnik wyposażenia.
Zakres i wielkość wyposażenia kotwicznego określa się według przepisów IK (PRS) na podstawie wskaźnika wyposażenia
określonego zależnością:
N
c
= D
2/3
+ 2Bh + 0,1A, gdzie:
D[t] – wyporność statku przy zanurzeniu do letniej wodnicy ładunkowej,
B[m] – szerokość statku,
h [m] – rzeczywista wysokość zmierzona od letniej wodnicy ładunkowej do górnej krawędzi najwyższej nadbudowy szerszej niż
0.25B,
A[m
2
] – pole bocznego rzutu kadłuba powyżej letniej wodnicy ładunkowej oraz nadbudówek o szerokości większej niż 0.25B w
obrębie długości L, nadburcia i zrębnice o wysokości powyżej 1.5m traktuje się jako nadbudowę.
Dla obliczonego w ten sposób wskaźnika ustala się kolejno, przez odczytanie z tabeli:
1. Liczbę kotwic głównych - większość statków ma 3 kotwice – dwie w kluzach i jedną zapasową, mniejsze lub o ograniczonym
rejonie żeglugi 2 w kluzach na dziobie a jedna występuje tylko w przypadku trzeciego rejonu żeglugi i na zupełnie małych
jednostkach.
2. Masę każdej z kotwic głównych, może być zmniejszona w stosunku do ustalonej wg wskaźnika wyposażenia, jeśli
zastosowane będą kotwice o zwiększonej sile trzymania.
3. Masę kotwicy prądowej (rufowej) – gdy silne prądy, porty u ujść rzek, wg PRS na najmniejszych jednostkach.
4. Łączną długość łańcuchów kotwicznych.
5. Kaliber łańcuchów kotwicznych.
6. Długość i wytrzymałość łańcucha kotwicy prądowej (liny).
Opisz pracę sprzężoną i równoległą żurawi bomowych.
1) Sprzężona. Praca bomami sprzężonymi polega na zastosowaniu dwóch żurawii. Stosowana jest więc dla lekkich żurawi. Jest o
wiele szybsza niż pojedyncza. Bomy są unieruchomione, jeden nad ładownią a drugi nad nabrzeżem. Renery są połączone
(sprzężone). Ładunek jest przemieszczany przez odpowiednie wybieranie i luzowanie lin ładunkowych na wciągarkach. Ze
względu na przestrzenny układ sił powodujący znaczne zwiększenie sił w ustrojach żurawia (zwłaszcza siły ściskającej bom)
udźwig bomów sprzężonych wynosi od 0,4 do 0,5 udźwigu żurawia pojedynczego.
2) Równoległa. W przypadku, gdy udźwig pojedynczego bomu jest zbyt mały, możemy zastosować pracę równoległą dwoma
bomami. Oba bomy mają ustalony ten sam wysięg a trawersa zaczepiona do obu bomów powoduje równomierne rozłożenie
ciężaru ładunku na dwa żurawie, co pozwala na przeniesienie dwukrotnie większego ciężaru niż wynosi udźwig pojedynczego
bomu.
Opisz typowe konstrukcje żurawi pokładowych wysięgnikowych.
żurawie pokładowe (wysięgnikowe) - dźwigowe urządzenia przeładunkowe do utrzymywania i przenoszenia ładunku bez
systemu lin i bloków zamocowanych poza obrębem własnej konstrukcji, montowane i pracujące najczęściej pojedynczo,
podstawowe elementy to :
- kolumna na stałe związana ze statkiem,
- obrotowa platforma, na której usytuowane są pozostałe elementy żurawia (może być zamontowana na układzie jezdnym
pozwalającym na przemieszczanie się żurawia po statku),

- układ napędu obrotu – mechaniczny,
- układ zmiany wysięgu i układ podnoszenia ładunku – linowe,
- wysięgnik,
- kabina operatora (zabudowana – przeszklona).
Żurawie pokładowe dzieli się w zależności od ich możliwości przemieszczania się po statku:
1. Żurawie obrotowe stacjonarne.
2. Żurawie obrotowe samojezdne,
- poruszające się wzdłuż statku,
- poruszające się w poprzek statku,
- poruszające się wzdłuż i w poprzek statku.
Spotyka się także podwójne żurawie umieszczone na jednej platformie. W zależności od potrzeby możemy sterować jednym lub
dwoma synchronicznie z jednej kabiny.
Wysięg żurawi wysięgnikowych nie odbiega zbytnio od wysięgu żurawi bomowych i wynosi od 10 do 20 metrów, udźwig wynosi
od 3 do 25 t, jednak spotyka się także żurawie pokładowe o udźwigu do 50 t służące do przeładunku kontenerów (kolumnowe).
Międzynarodowa Organizacja Morska, IMO
(ang. International Maritime Organisation) jest organizacją
wyspecjalizowaną systemu Narodów Zjednoczonych, zajmującą się sprawami morskimi, a w szczególności bezpieczeństwem na
morzu oraz zapobieganiem zanieczyszczeniu środowiska morskiego przez statki.
IMO działa poprzez następujące organy:
Zgromadzenie
Radę
5 Komitetów
Sekretariat
Kadencja IMO trwa 2 lata, a urzędnicy nie podejmują decyzji. W skład Zgromadzenia wchodzą delegacje wszystkich krajów
członkowskich.
Towarzystwo klasyfikacyjne
– państwowa lub prywatna organizacja rzeczoznawcza zajmująca się głównie
klasyfikacjąjednostek pływających. Zwykle ma placówki i przedstawicielstwa w najważniejszych portach na całym świecie i
zatrudnia inspektorów i rzeczoznawców.
Nadzór nad nowo budowaną jednostką jest sprawowany dwuetapowo poprzez:
1. zatwierdzanie dokumentacji,
2. przegląd zasadniczy.
Istniejące jednostki pływające są poddawane przeglądom konwencyjnym oraz klasyfikacyjnym poprzez przeglądy:
1. przegląd roczny,
2. przegląd pośredni (2 lub 3 przegląd roczny od odnowienia klasy),
3. przegląd dla odnowienia klasy (5 przegląd roczny).
Do trzech największych towarzystw klasyfikacyjnych pod względem ilości statków należą, LR, DNV oraz ABS. Są to
towarzystwa tworzące tak zwaną wielką trójcę. Najbardziej renomowane towarzystwa zrzeszone są w International Association of
Classification Societies, IACS, lub zostały uznanę przez Europejską Agencję do spraw Bezpieczeństwa na Morzu, EMSA.
Wyszukiwarka
Podobne podstrony:
calosctomek id 108195 Nieznany
Calosc 4 id 108102 Nieznany
METODOLOGIA calosc id 294963 Nieznany
calosc id 108098 Nieznany
profil calosc id 394295 Nieznany
diagnostyka sem 2 calosc id 135 Nieznany
calosc 2 id 108100 Nieznany
Fizyka calosc id 177445 Nieznany
Opracowanie calosc id 338133 Nieznany
fizyka calosc 2 id 176622 Nieznany
Cw 5 Weryf calosc id 97733 Nieznany
calosctomek id 108195 Nieznany
Calosc 4 id 108102 Nieznany
D 2 calosc I,II,III id 130089 Nieznany
Calosc BD id 108184 Nieznany
calosc maszyny pomoc id 107377 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
więcej podobnych podstron