
14.05.2012
Sprawozdanie
Cykl 3 temat 2:
„Badanie układu regulacji ciągłej”
Grupa C5
Grupa ćwiczeniowa 2
Celiński Patryk
Drzewiecki Dominik
Gembicki Jacek
Kozak Marta
Słabik Ewa
Walczak Justyna
Warda Paulina
Wprowadzenie
Celem ćwiczenia było zbadanie kompleksowego układu automatycznej regulacji ciągłej - dokonywania jego
rozruchu, przeanalizowania właściwości dynamicznych, efektywności pracy.
Obiektem regulacji był zbiornik z wodą z możliwością swobodnego wypływu i załączenia opóźnienia. Gdy
umożliwiano swobodny wypływ obiekt miał zdolność do samowyrównywania – gdy pompa doprowadzi do
zbiornika więcej wody w jednostce czasu, to natężenie wypływającej wody w odpływie zwiększy się, aby
odzyskać poziom równowagi. Obiekt ten jest wtedy statyczny i jest członem inercyjnym I rzędu . Gdy zawór
jest zamknięty, wypływ ze zbiornika wymuszony jest pompą. Po uzyskaniu odpowiedniego poziomu wody
pompa przestanie pracować. Obiekt taki jest astatyczny i jest członem całkującym.
W skład instalacji obiektowej wchodził:
- pneumatyczny przetwornik pomiarowy badający poziom cieczy (złożony z sondy bąbelkującej, regulatora
małych przepływów i przetwornika średnich ciśnień)
- urządzenie wykonawcze (siłownik pneumatyczny membranowy z ustawnikiem pozycyjnym, a także zawór
regulacyjny)
- zbiorniki: pomiarowy dwukomorowy oraz magazynujący z układem napełniania i opróżniania.
Częścią centralną układu regulacji były panele funkcjonalne:
- regulator pneumatyczny (PRP)
- rejestrator pneumatyczny (PRR)
- panel sygnalizacji alarmu i sterowania (PSA)
Poziom cieczy miał być utrzymywany na stałej żądanej wysokości wprowadzonej z zadajnika do regulatora.
Układ zasilany był elektrycznie (220V/24V) i pneumatycznie (140 kPa).
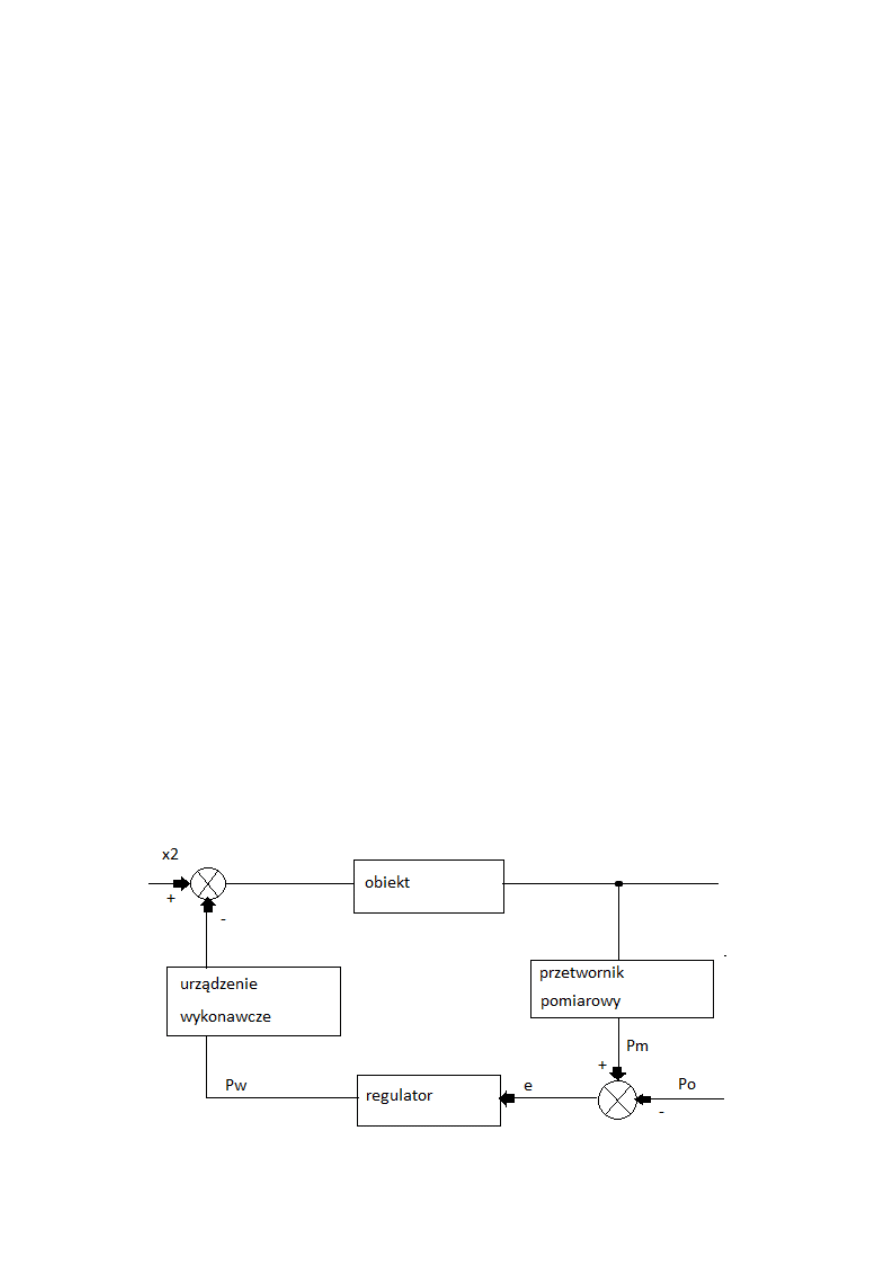
Struktura ogólna układu automatycznej regulacji

Przebieg ćwiczenia
Analizowano odpowiedzi skokowe układu regulacji w różnych kombinacjach wypływu i opóźnienia dla
wartości zadanej równej 60% całkowitego poziomu wody w zbiorniku.
Wariant 1 – Kp= 1,2 bez opóźnienia odpływ otwarty
Wariant 2 – Kp= 5,2 bez opóźnienia odpływ otwarty
Wariant 3 – Kp= 11,2 bez opóźnienia odpływ otwarty
Wariant 4 – Kp= 1,2 bez opóźnienia odpływ zamknięty
Wariant 5 – Kp= 5,2 bez opóźnienia odpływ zamknięty
Wariant 6 – Kp= 11,2 bez opóźnienia odpływ zamknięty
Wariant 7a – Kp= 1,2 z opóźnieniem odpływ otwarty
Wariant 7b – Kp= 1,2 z opóźnieniem otwarty dodatkowo drugi odpływ, potem zamknięty
Wariant 8 – Kp= 5,2 z opóźnieniem odpływ otwarty
Wariant 9 – Kp= 11,2 z opóźnieniem odpływ otwarty
Wariant 10 – Kp= 1,2 z opóźnieniem zamknięty odpływ
Wariant 11 – Kp= 5,2
z opóźnieniem zamknięty odpływ
Wariant 12 – Kp=11,2
z opóźnieniem zamknięty odpływ
Analizowano obiekty regulacji typu inercyjnego i całkującego o znacznej stałej czasowej i dopuszczano
niewielką odchyłkę, dlatego zastosowano regulator typu P.
Obliczenia
A) Obiekt inercyjny I rzędu G(s)=
Regulator typu P G(s)= Kp
Ti = 10 s Kp = 1,2 / 5,2 / 11,2
Td= 0 s Kob = 1,6
Wartość przeregulowania x = (Ep1/Ep0)*100%
Zakres proporcjonalności Xp=
*100%
Odchyłka regulacji eu =
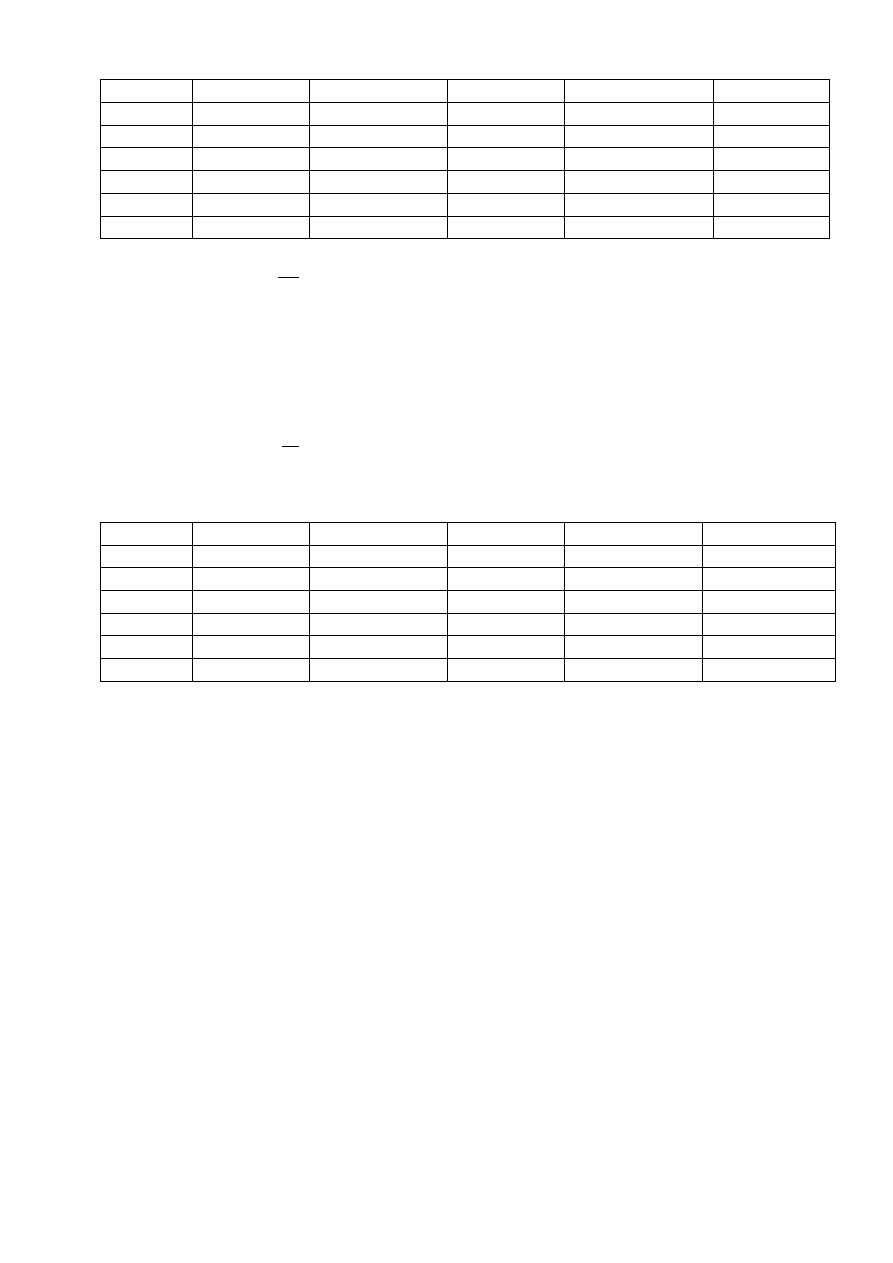
X [%]
eu
Xp
t. opóźnienia
Tr
Wariant 1 21,6
9,07
83
-
190
Wariant 2 5
1,025
19,23
-
75
Wariant 3 0
0
9,82
-
45
Wariant 7 41,6
17,52
83
8s
49
Wariant 8 5
1,025
19,23
8s
45
Wariant 9 33,3
0,39
9,82
8s
-
B) Obiekt całkujący G(s)=
Regulator typu P G(s)= Kp
Ti = 10 s Kp = 1,2 / 5,2 / 11,2
Td= 0 s Kob = 1,6
Zakres proporcjonalności Xp=
*100%
Odchyłka regulacji eu= 0
eu
Xp
x
t. opóźnienia
Tr
Wariant 4
0
83
0
-
25
Wariant 5
0
19,23
0
-
13
Wariant 6
0
9,82
0
-
35
Wariant 10
0
83
0
8s
35
Wariant 11
0
19,23
0
8s
35
Wariant 12
0
9,82
0
8s
35
Wnioski:
- Gdy obiekt przyjmuje odpowiedź statyczną (inercyjną I rzędu) odchyłka regulacji jest wprost
proporcjonalna do wartości wymuszenia skokowego i odwrotnie proporcjonalna do współczynnika
wzmocnienia.
- Gdy obiekt przyjmuje odpowiedź astatyczną (całkującą) to odchyłki ustalone równe są zeru
niezależnie od wartości wymuszenia.
- W wariancie 7a i b po ustawieniu warunków początkowych (opóźnienie i otwarty odpływ) i
odczekaniu do momentu stabilizacji odpowiedzi skokowej otworzono dodatkowy zawór zakłócający
osiągniętą równowagę (zwiększający natężenie wypływu ze zbiornika). Dzięki sprzężeniu
zwrotnemu pompa została nastawiona do intensywniejszej pracy aż do osiągnięcia poziomu
zadanego.
Układ taki jest w stanie reagować na zmiany parametrów pracy – jest samowyrównywalny.
- W przypadku, gdy współczynnik wzmocnienia Kp jest wysoki, układ pracuje z opóźnieniem a
informacja o poziomie cieczy w zbiorniku nie jest odpowiednio szybko przetwarzana na sygnał
nastawczy zaworu regulacyjnego pompy, odpowiedź skokowa obiektu nie stabilizuje się, ale przez
ciągłe i szybkie zmiany sygnału naddatku pompy oscyluje wokół wartości zadanej (wariant 9)
- W wielu przypadkach regulacji ciągłej z dużą stałą czasową odchyłki statyczne nie mają znaczącego
wpływu na efekt regulacji. W takich wypadkach stosuje się regulatory typu P. W większości
wariantów (75%) spełnia on wymagania 0-5% przeregulowania przy minimalnym czasie regulacji.
Wyszukiwarka
Podobne podstrony:
Badanie ukladu regulacji id 781 Nieznany (2)
Badanie ukladu sercowo naczynio Nieznany
BADANIE UKŁADU REGULACJI DWUPOŁOŻENIOWEJ
Badanie układu sterowania z regulatorem PID
Badanie ukladu nerwowego id 781 Nieznany
L4 Układ regulacji ciągłej Badanie regulatorów
Badanie regulatorow nieliniowyc Nieznany
cw 2 - Badanie modelu transformatorowego układu regulacji napięcia - Gustav, Politechnika Lubelska,
Badanie układu sterowania z regulatorem PID
Badanie układu kostno stawowego i mięśniowego (1)
Ananatomia i fizjologia badania ukladu oddechowego u dzieci
Badania operacyjne wyklad 2 id Nieznany
więcej podobnych podstron