1
Automatyka i sterowanie
Część III
Zestaw ilustracji do wykładu „Automatyka i sterowanie”
kurs 10 godz. dla studiów magisterskich uzupełniających
opracował dr inż. Grzegorz Rogacki
2
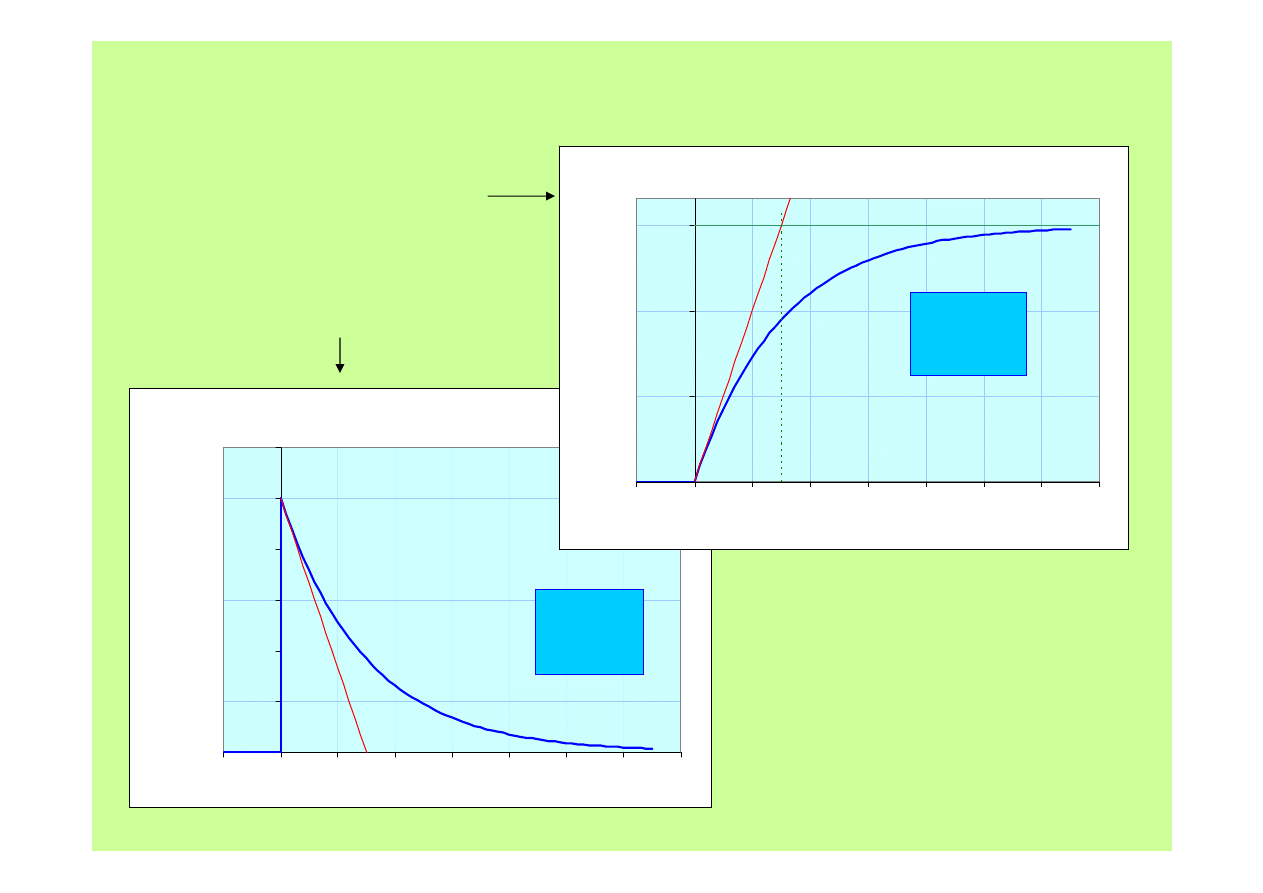
Odpowiedzi członu inercyjnego I-go rzędu
Skok 1(t)
0
0.1
0.2
0.3
0.4
0.5
0.6
-1
0
1
2
3
4
5
6
7
K = 0.75
T = 1.5
y(
t)
0
0.25
0.5
0.75
-1
0
1
2
3
4
5
6
7
K = 0.75
T = 1.5
y(
t)
Impuls Diraca
3
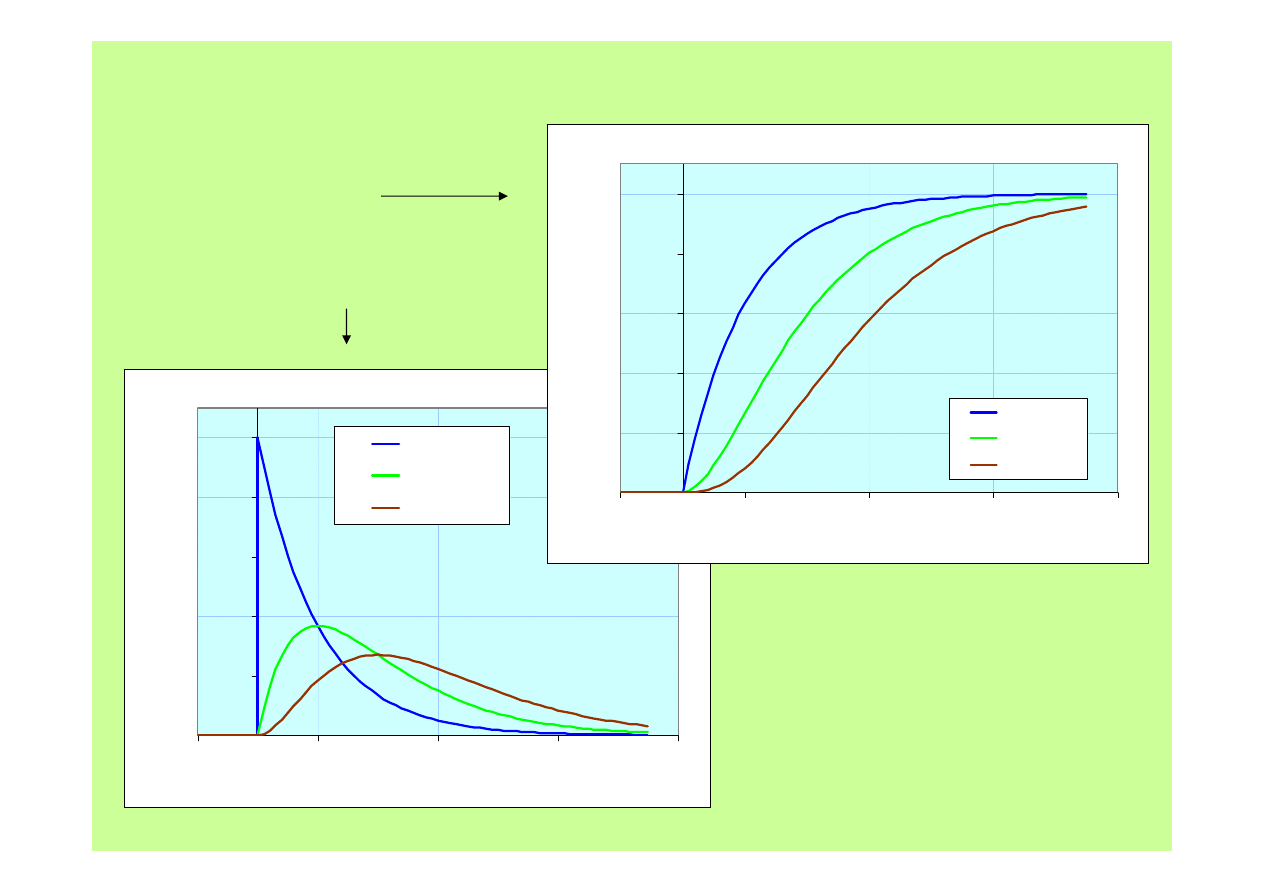
Odpowiedzi członów wyższych rzędów
0.0
0.2
0.4
0.6
0.8
1.0
-1
1
3
5
7
czas
I-szy rząd
II-gi
III-ci
0
0.2
0.4
0.6
0.8
1
-1
1
3
5
7
czas
I-szy rząd
II-gi
III-ci
Skok 1(t)
Impuls Diraca
4
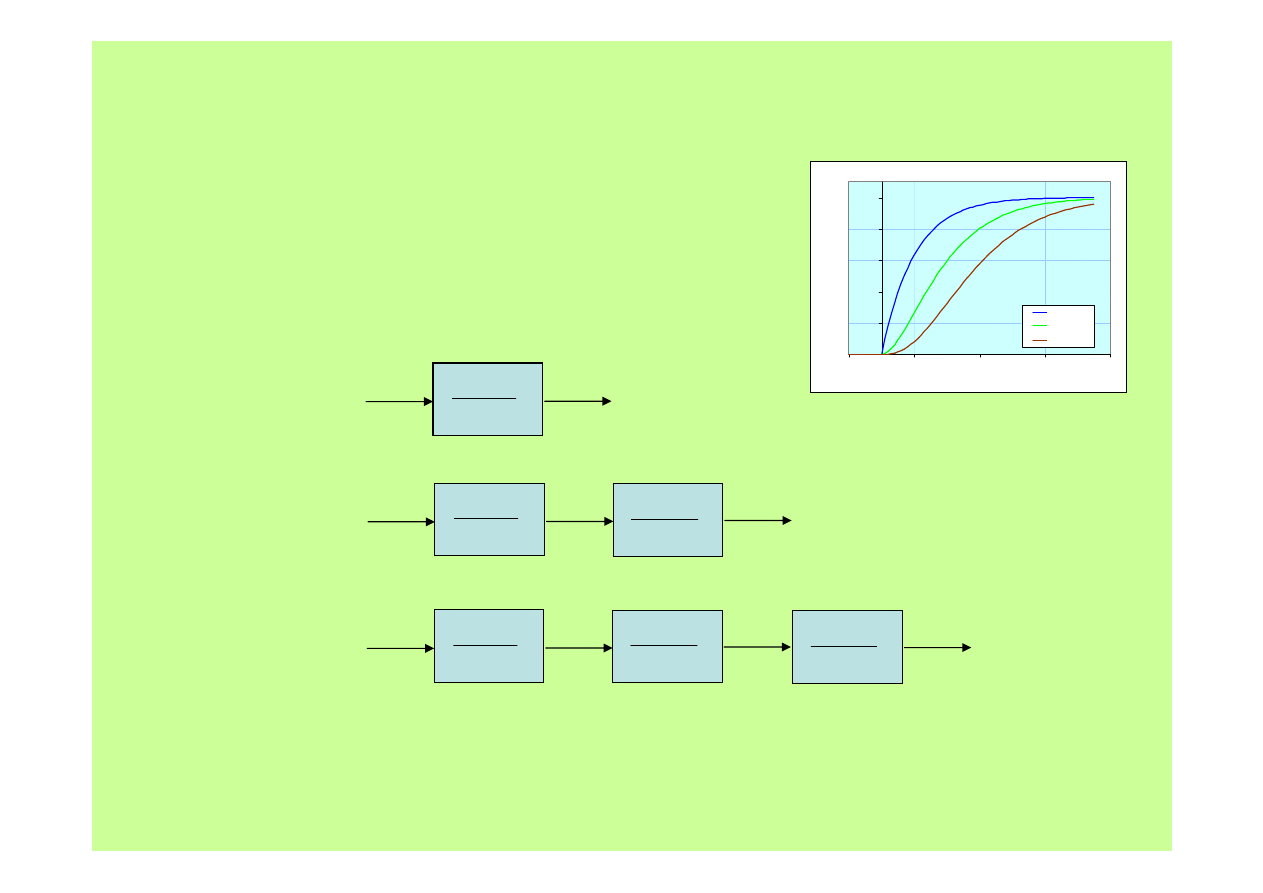
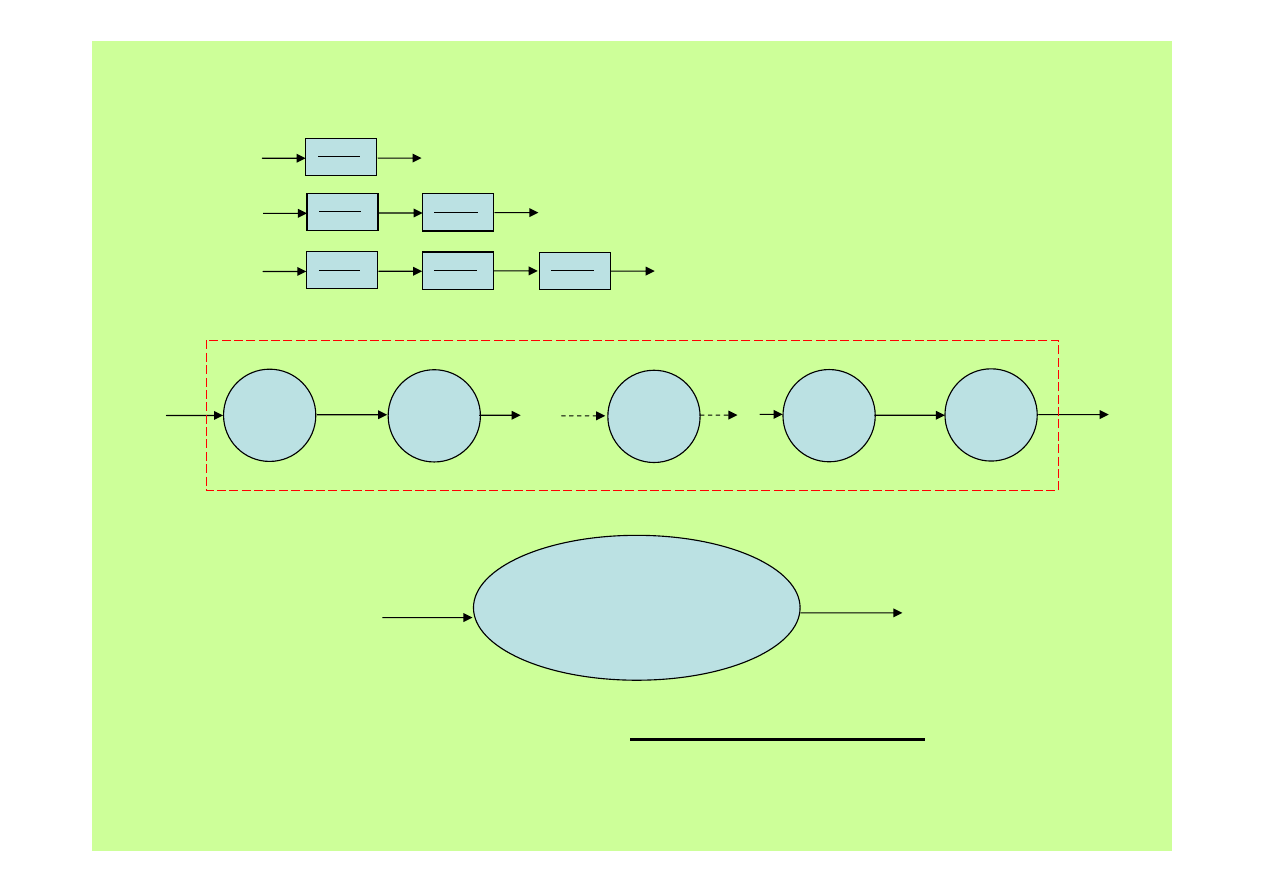
Obiekty złożone
0
0.2
0.4
0.6
0.8
1
-1
1
3
5
7
czas
I-szy rząd
II-gi
III-ci
X
Y
1
1
1
+
s
T
K
I-szy rząd
X
Y
Y
2
1
1
1
1
+
s
T
K
1
2
2
+
s
T
K
II-gi rząd
X
Y
Y
2
Y
3
1
1
1
1
+
s
T
K
1
2
2
+
s
T
K
1
3
3
+
s
T
K
III-ci rząd
5
Obiekty złożone – układ szeregowy
X
Y
1
1
+
s
T
K
I-szy rząd
X
Y
1
1
1
+
s
T
K
1
2
+
s
T
K
Y
2
II-gi rząd
X
Y
1
1
1
+
s
T
K
1
2
+
s
T
K
Y
2
1
3
+
s
T
K
Y
3
III-ci rząd
G
1
G
2
G
i
G
N-1
G
N
Y
X
∏
=
N
i
i
G
1
Y
X
Transmitancja układu szeregowego bez oddziaływania wstecz jest iloczynem
transmitancji elementów tego szeregu.
6
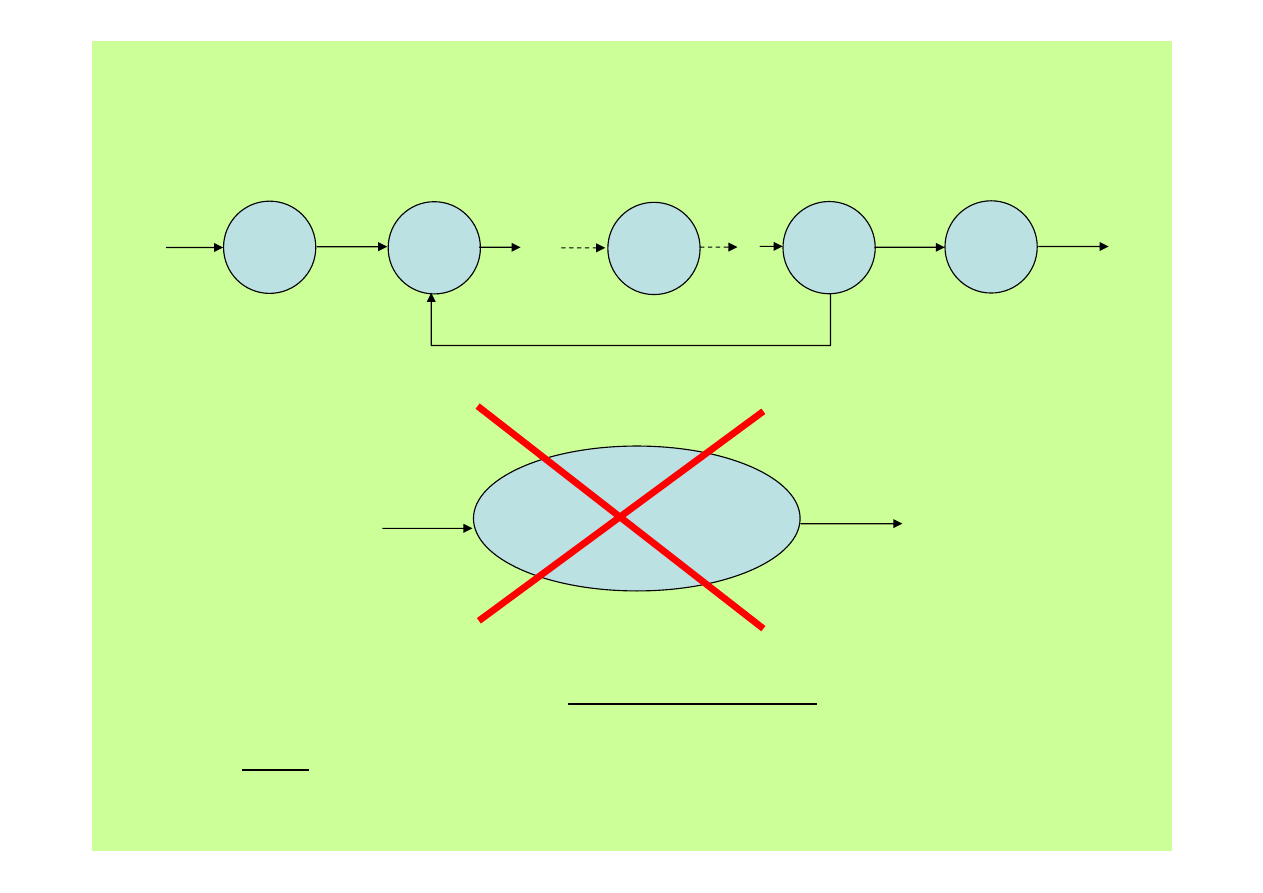
Obiekty złożone
G
1
G
2
G
i
G
N-1
G
N
Y
X
∏
=
N
i
i
G
1
Y
X
Jeśli w układzie występuje oddziaływanie wstecz to zagadnienie trzeba
analizować indywidualnie w zależności od natury tego oddziaływania i nie istnieje
żadna formuła na transmitancję.
szkoda!
7
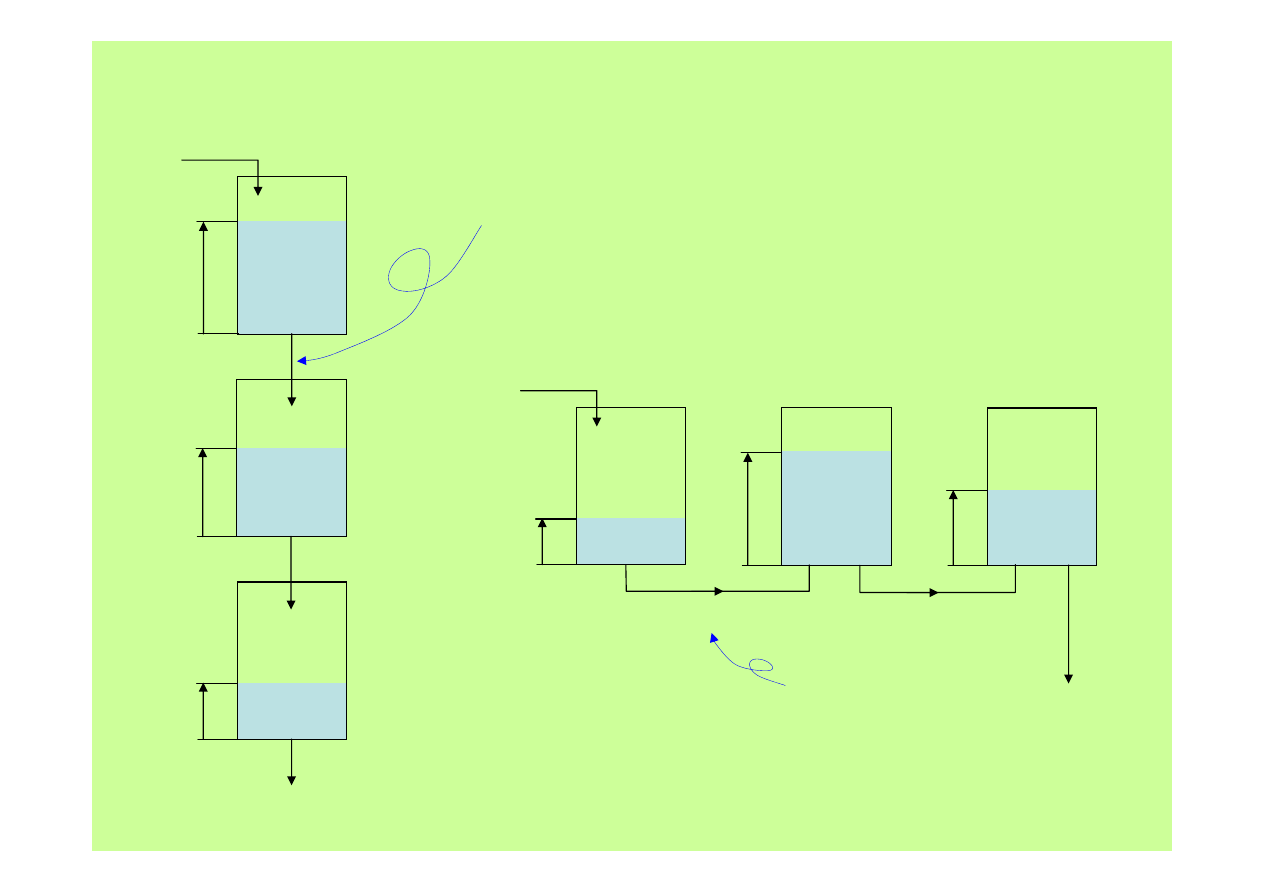
Obiekty złożone - przykład
Q
0
h
1
Q
1
Q
0
h
2
Q
2
Q
3
h
2
h
3
h
1
Q
2
Q
1
1
1
1
h
k
Q
=
(
)
2
1
12
1
h
h
k
Q
−
=
nie ma oddziaływania wst
ecz
jest oddzia
ływanie
wstecz
Q
3
h
3
8
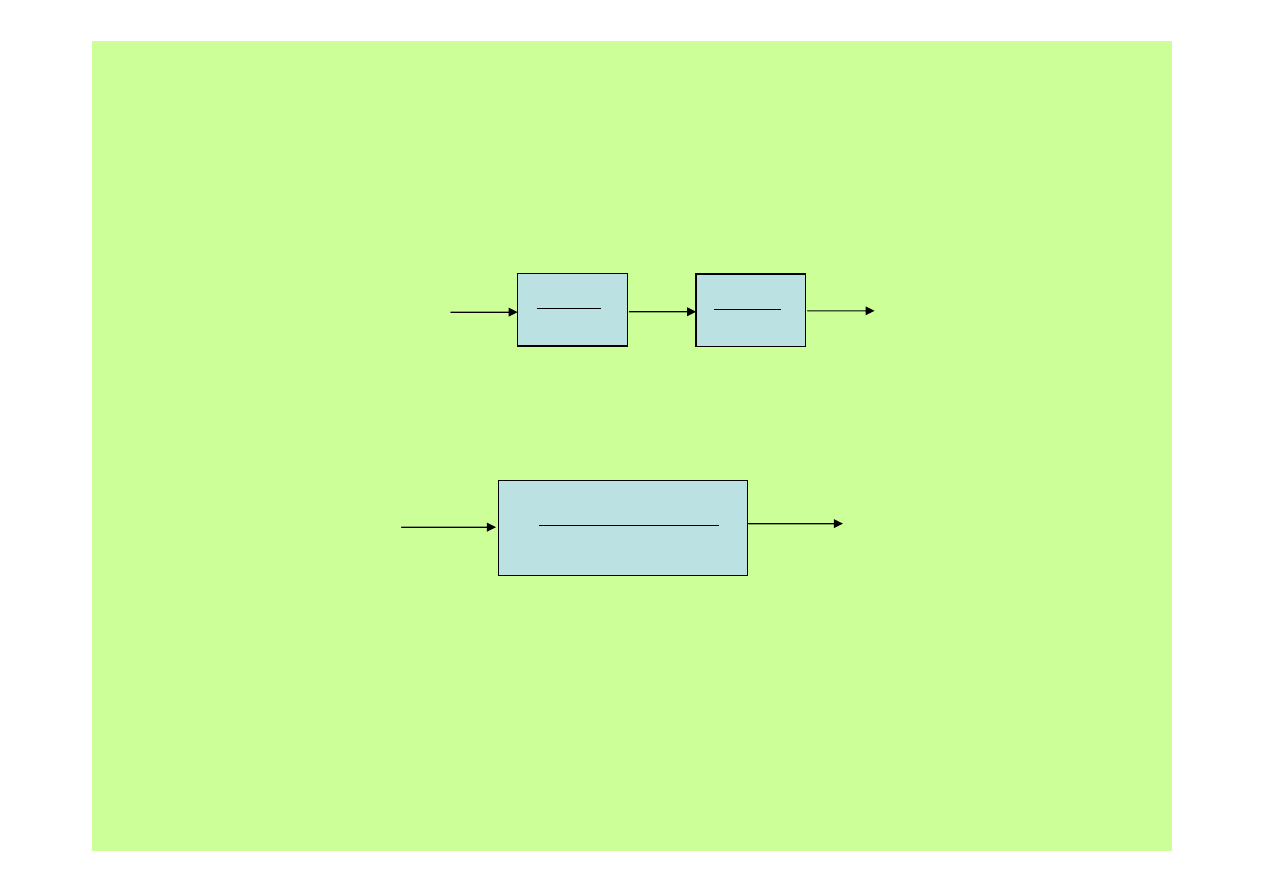
Człon inercyjny II- go rzędu
X
Y
Y
2
1
1
1
1
+
s
T
K
1
2
2
+
s
T
K
II-gi rząd
(
)(
)
1
1
2
1
+
+
s
T
s
T
K
Y
X
Człon inercyjny II-go rzędu ma dwie stałe czasowe (T
1
, T
2
)
i współczynnik wzmocnienia K.
9
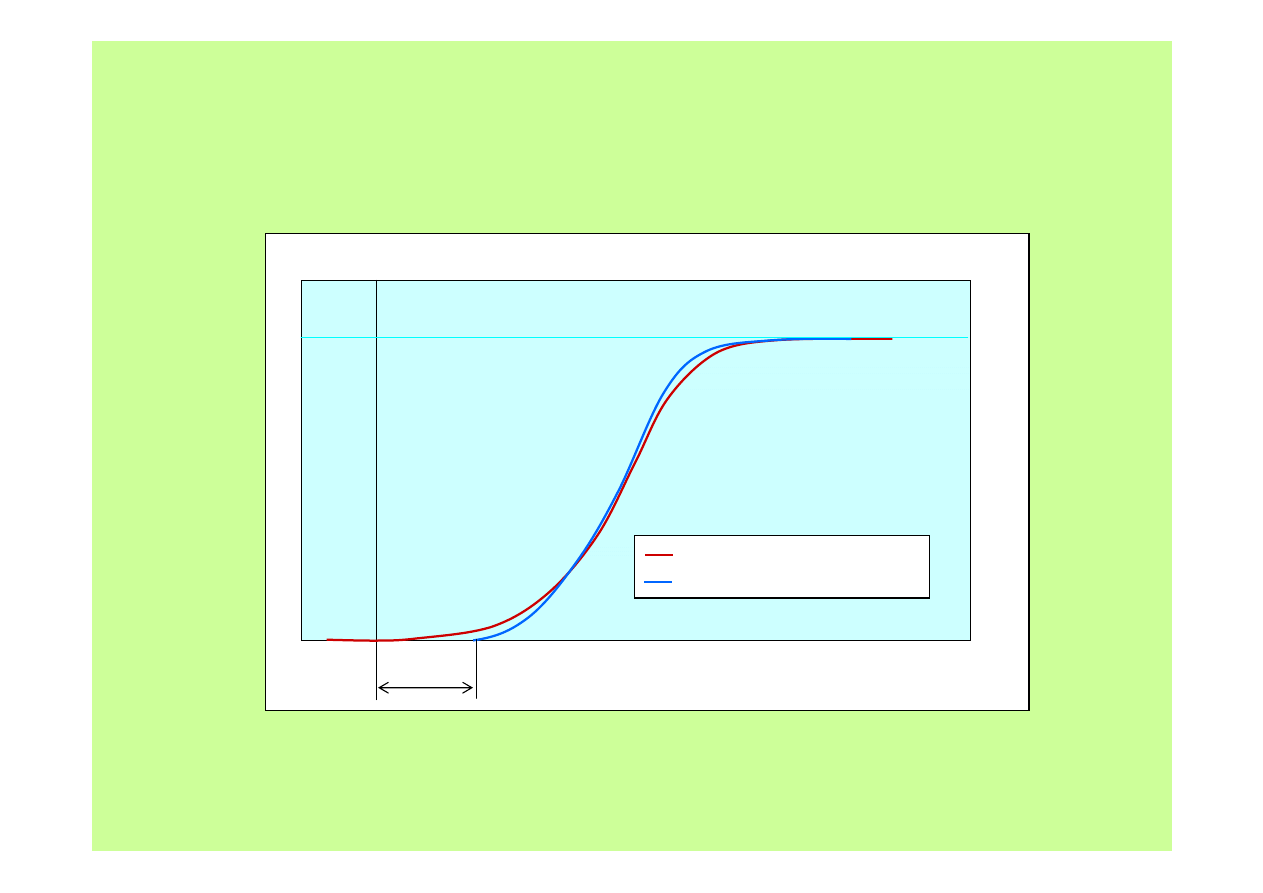
Odpowiedzi obiektów rzeczywistych
T
0
sygnał rzeczywisty
przybliżenie
czas
jak uwzględnić matematycznie opó
źnienie?
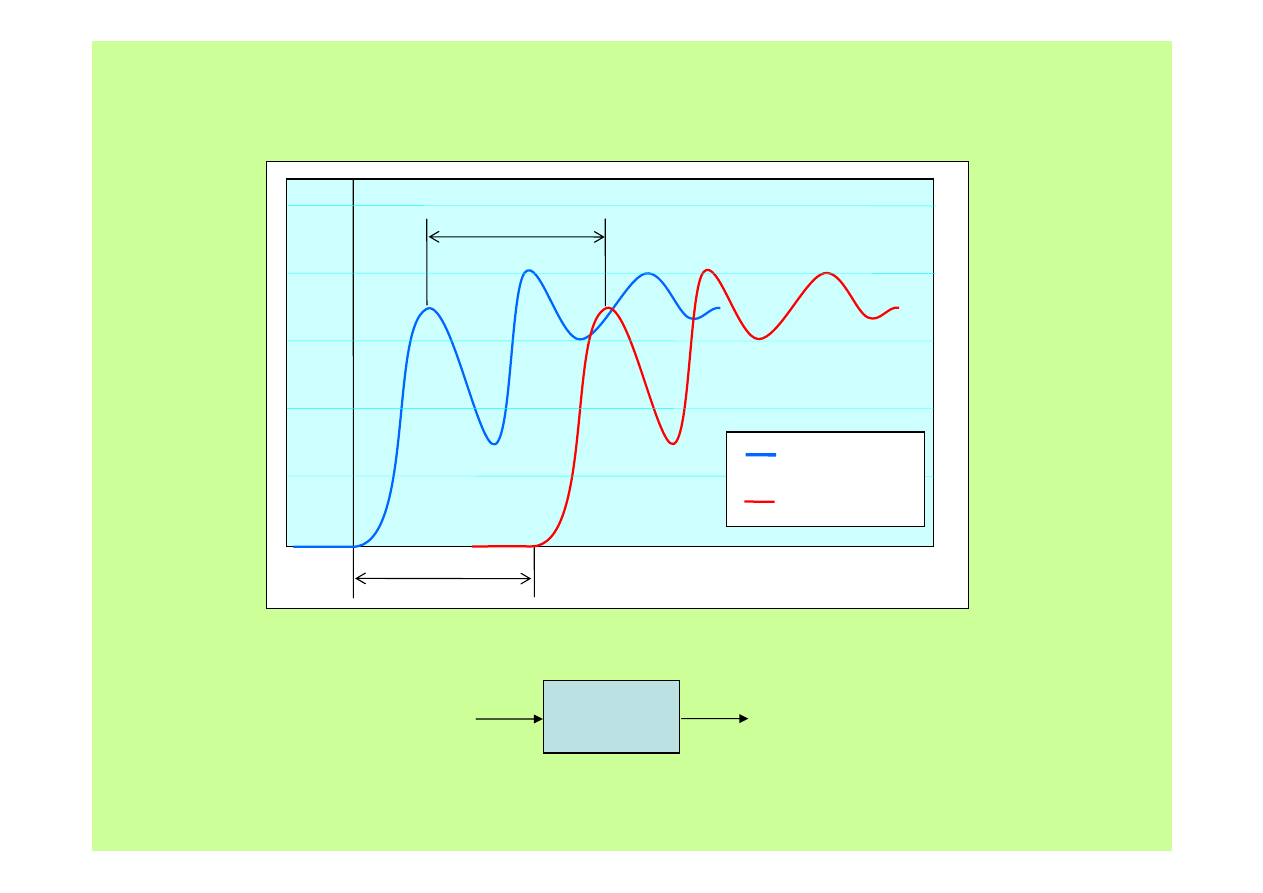
10
Człon opóźniający
T
0
czas
L
T
0
)
(t
f
y
=
)
(
0
T
t
f
y
−
=
X
Y
)
exp(
0
s
T
−
11
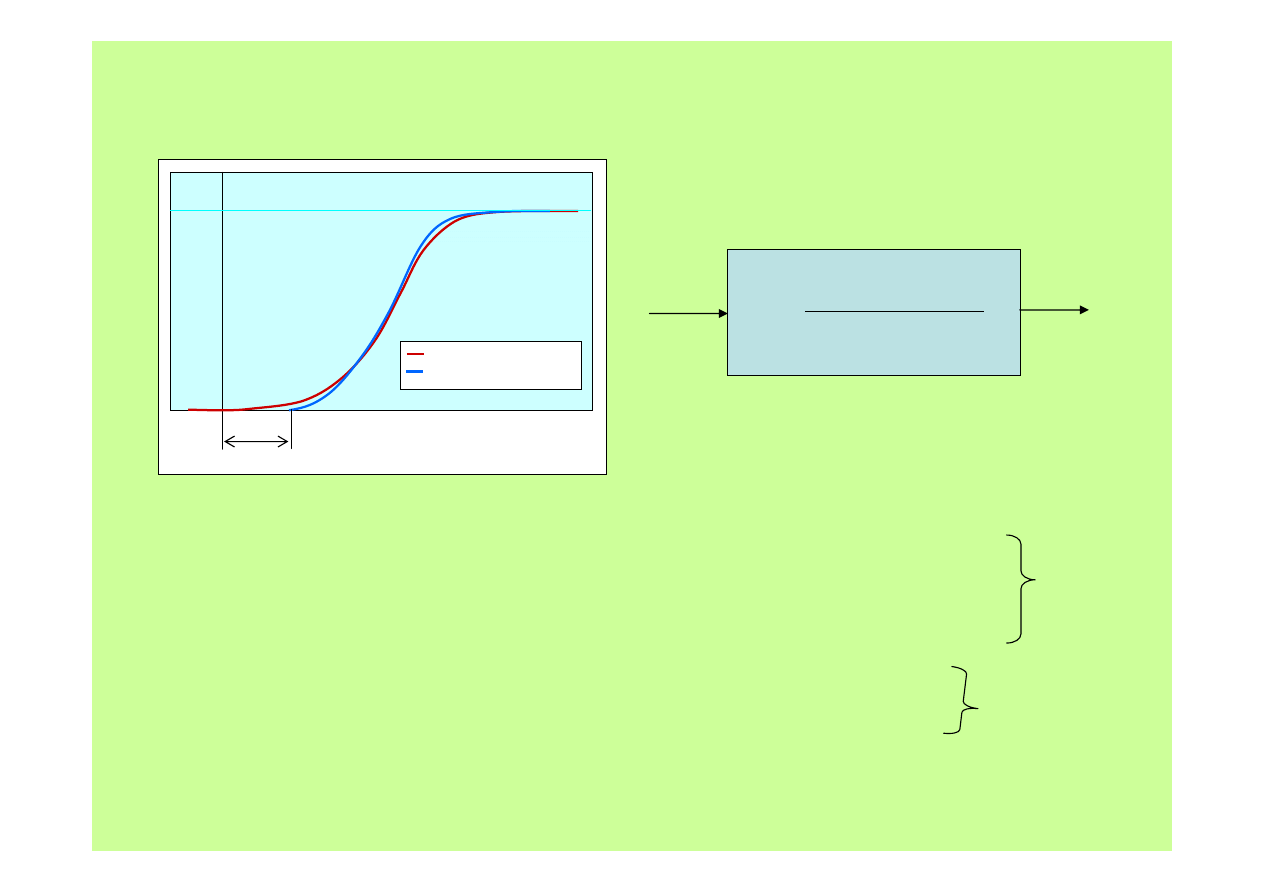
Odpowiedzi obiektów rzeczywistych
T
0
sygnał rzeczywisty
przybliżenie
czas
(
)(
)
1
1
)
exp(
2
1
0
+
+
−
s
T
s
T
s
T
K
Y
X
• W wielu przypadkach odpowiedź układu rzeczywistego daje się przybliżyć
odpowiedzią członu inercyjnego II-go rzędu z opóźnieniem.
• Do opisu dynamiki obiektu „wystarczą” wtedy trzy stałe czasowe: T
0
, T
1
, T
2
.
• Trzeba oczywiście umieć je wyznaczyć.
• Wyznaczanie stałych dla obiektów nazywamy
identyfikacją.
dob
rze
nie
dob
rze
12
Sterowanie, regulacja,
automatyka
(Process Control)
13
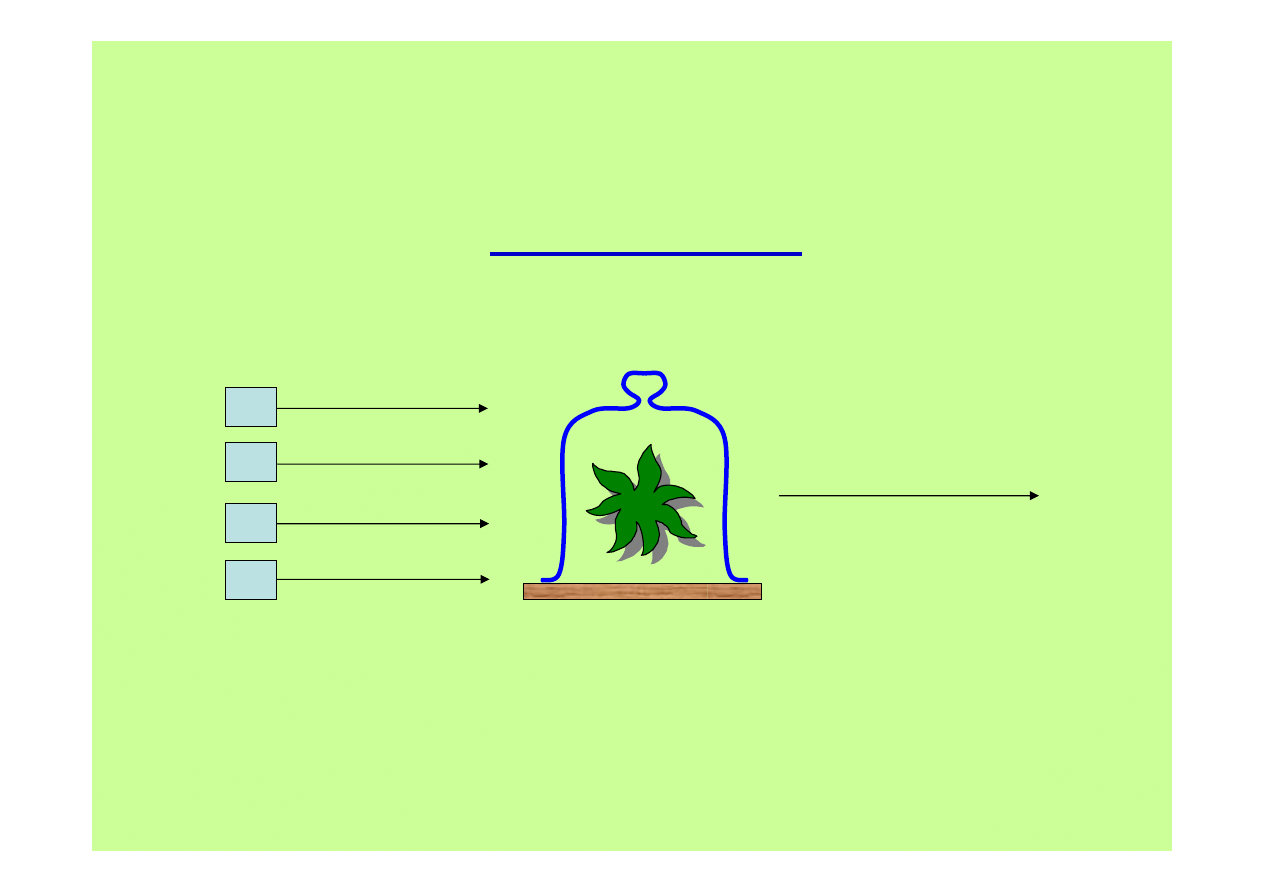
Strategie regulacji
A. Sterowanie w układzie otwartym
wilgotność
temperatura
oświetlenie
NPK
ϕ
R
C
R
°
L
R
X
R
zgodny z normą UE
14
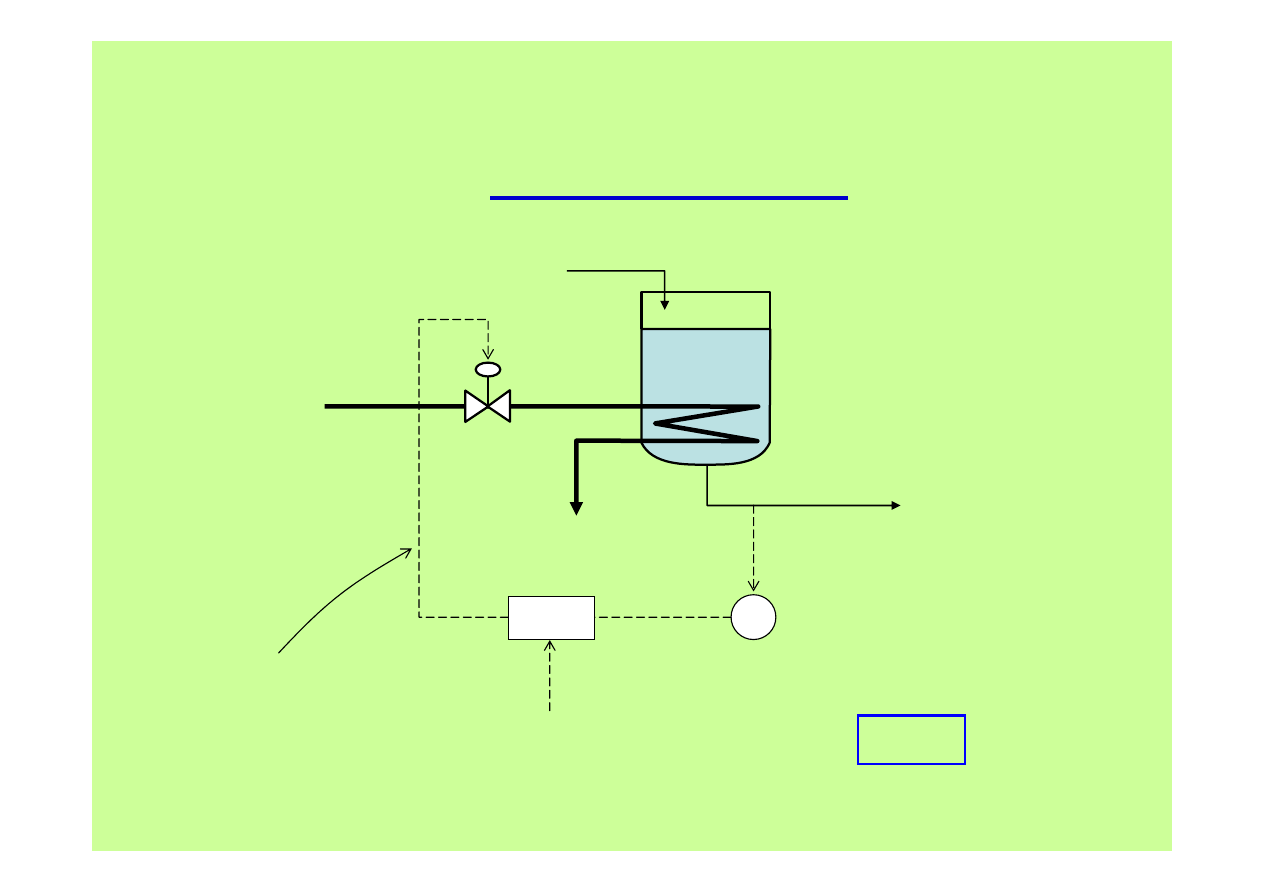
Strategie regulacji
B. Sterowanie w układzie zamkniętym
IN
Q
ϑ
,
OUT
ϑ
R
ϑ
z
ϑ
para
grzejna
z
out
ϑ
ϑ
−
to jest to
„słynne
”
sprzężen
ie zwrotn
e
Uchyb regulacji:
15
Strategie regulacji
A. Sterowanie w układzie otwartym
B. Sterowanie w układzie zamkniętym
Obie stra
tegie są
możliwe
niezależn
ie, czy re
gulacja j
est
ręczna c
zy autom
atyczna.
16
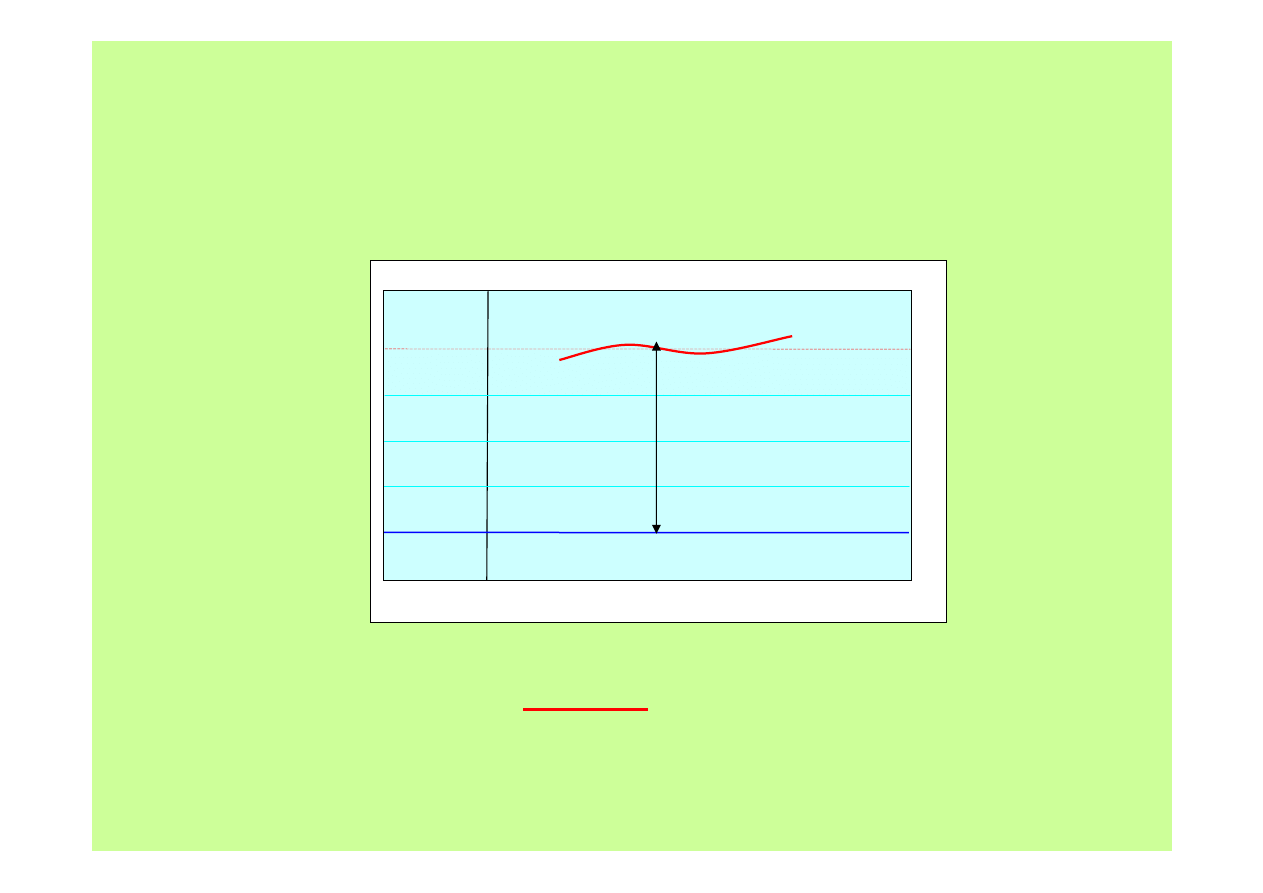
Regulacja – dobroć regulacji
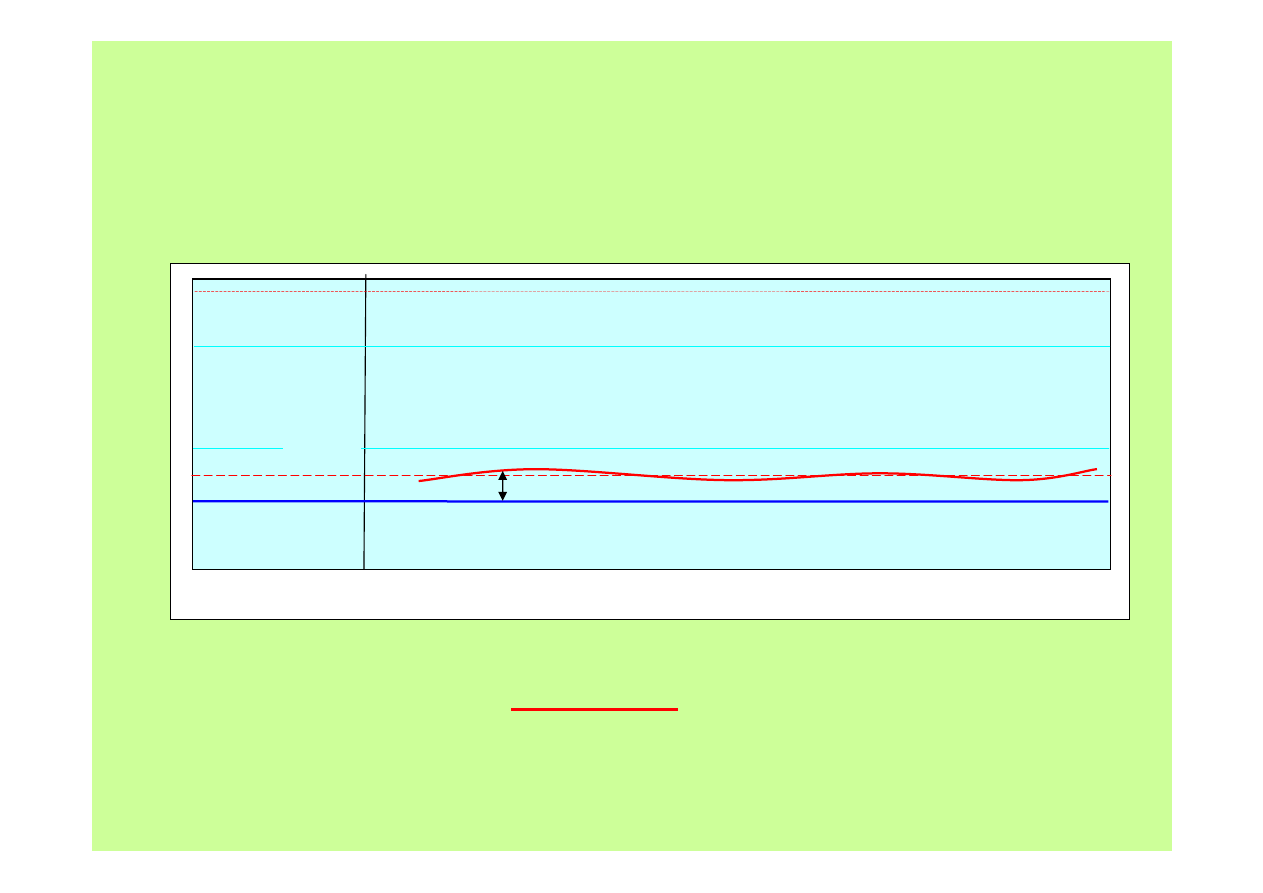
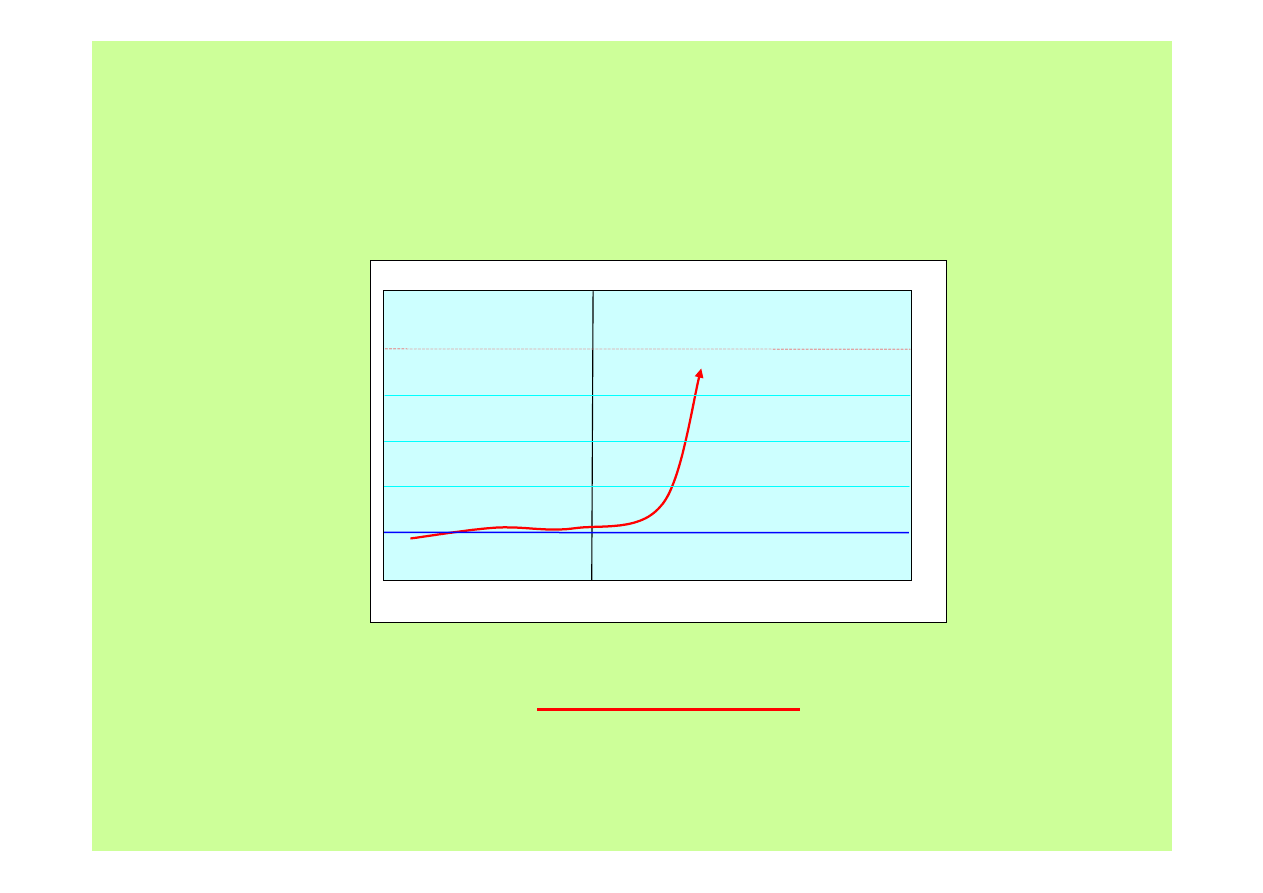
Kiedy jest źle? Kiedy trzeba interweniować?
czas
36,6°C
42°
∆X
∆
X
uchyb
1. Gdy dany parametr
znacznie
odbiega od wartości zadanej.
17
Regulacja – dobroć regulacji
Kiedy jest źle? Kiedy trzeba interweniować?
czas
36,6°C
42°
37,5°
∆X
∆
X
uchyb
2. Gdy dany parametr
chronicznie
odbiega od wartości zadanej
choć uchyb nie jest duży.
18
Regulacja – dobroć regulacji
Kiedy jest źle? Kiedy trzeba interweniować?
czas
36,6°C
42°
∆
X
uchyb
rośnie
3. Gdy dany parametr
gwałtownie ucieka
od wartości zadanej.
19
Metody regulacji
1. Gdy dany parametr znacznie odbiega od wartości zadanej.
2. Gdy dany parametr chronicznie odbiega od wartości zadanej.
3. Gdy dany parametr gwałtownie ucieka od wartości zadanej.
1. Współmiernie do uchybu.
2. Współmiernie do całki uchybu.
3. Współmiernie do pochodnej uchybu.
20
Metody regulacji
1. Współmiernie (proporcjonalnie) do uchybu.
2. Współmiernie do całki uchybu.
3. Współmiernie do pochodnej uchybu.
proporcja
proportio
P
całkowity
integer
I
różnica (pochodna)
differentia
D
nikt mni
e nie ucz
yl łaciny!
21
Metody regulacji
1. regulacja proporcjonalna
P
2. regulacja całkująca
I
3. regulacja różniczkująca
D
aha, r
egula
tor PI
D
mam
coś t
akieg
o
w mo
im Fe
rrari
Wszystkie
trzy metody
są ciągle m
ożliwe
niezależnie
, czy regulac
ja jest ręcz
na czy
automatyc
zna.
22
Metody regulacji
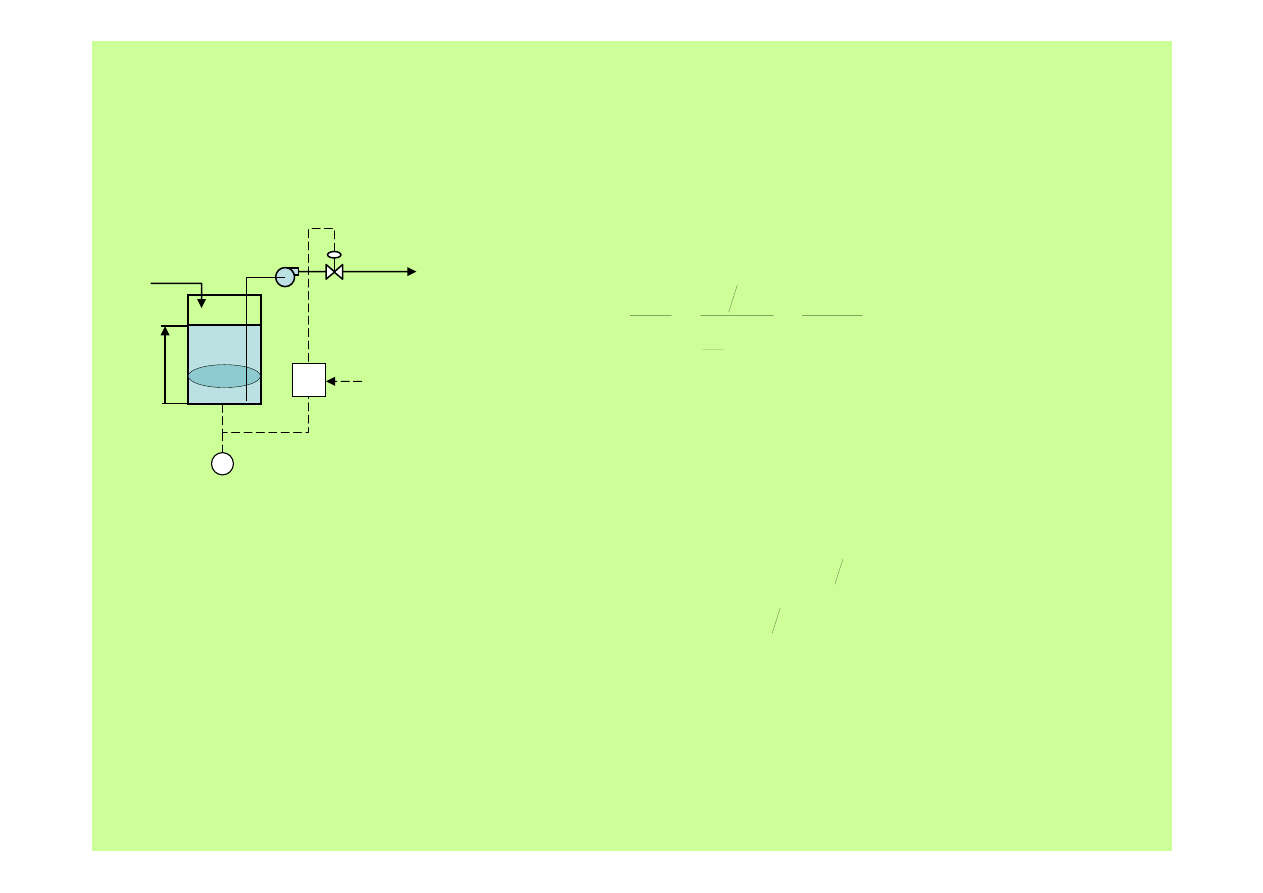
1. Regulacja proporcjonalna zbiornika magazynującego
Q
OUT
Q
IN
A
V
h
R
(
)
z
OUT
h
h
k
Q
−
⋅
=
h
h
z
matematyczny
zapis
działania regul
acji
proporcjonalnej
23
Metody regulacji
1. Regulacja proporcjonalna …
1. Bilans cieczy
OUT
IN
Q
Q
dt
dh
A
−
=
Q
OUT
Q
IN
h
A
V
h
R
2. Plus działanie regulatora
(
)
z
IN
h
h
k
Q
dt
dh
A
−
−
=
h
z
3. Definiujemy uchyb
∆
h -
uchyb
z
h
h
h
−
≡
∆
4. Zakładamy, że dla
t
= 0 układ był „w porządku” czyli
ciecz w zbiorniku była na poziomie zadanym
0
,
,
0
=
∆
=
=
h
h
h
t
z
24
Metody regulacji
1. Regulacja proporcjonalna …
5. Wracamy do równania z punktu 2
Q
IN
A
V
Q
OUT
h
R
h
z
h
k
Q
dt
h
d
A
IN
∆
⋅
−
=
∆
0
,
0
=
∆
=
h
t
h
6. Stosujemy przekształcenia Laplace’a
h
k
Q
h
As
IN
∆
⋅
−
=
∆
7. Obliczamy stosunek
IN
Q
h
∆
k
As
Q
h
IN
+
=
∆
1
gdzieś ju
z to widz
ieliśmy
25
Metody regulacji
1. Regulacja proporcjonalna …
8. No pewnie!
Q
IN
A
V
Q
OUT
h
R
h
z
1
1
1
+
=
+
=
∆
Ts
K
s
k
A
k
Q
h
IN
1. Zbiornik magazynujący (całkujący) z regulacją proporcjonalną
poziomu cieczy ma dynamikę członu inercyjnego I-go rzędu.
2. Stała czasowa tego członu wynosi .
3. Wzmocnienie członu wynosi .
4.
A – przekrój zbiornika; k – wzmocnienie regulacji P.
k
A
k
1
h
26
Metody regulacji
1. Regulacja proporcjonalna …
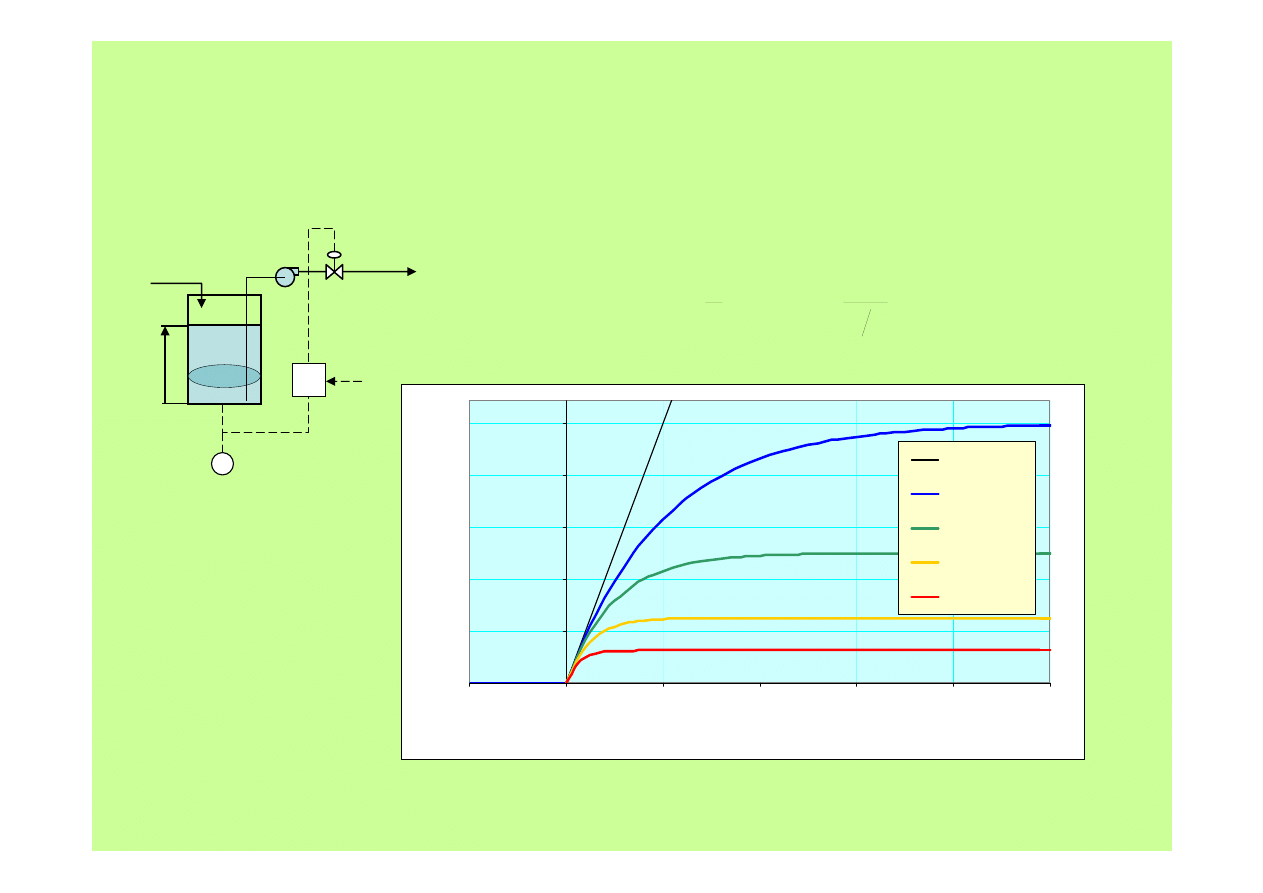
8. Odpowiedź czasowa na skok Q
IN
= 1(t)
Q
IN
A
V
Q
OUT
h
R
h
z
( )
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
⋅
=
∆
k
A
t
k
Q
t
h
IN
exp
1
1
0.0
0.2
0.4
0.6
0.8
1.0
-1
0
1
2
3
4
5
czas
uc
hy
b
bez regulacji
k = 1
k = 2
k = 4
k = 8
h
bez regul
acji – ka
tastrofa!
27
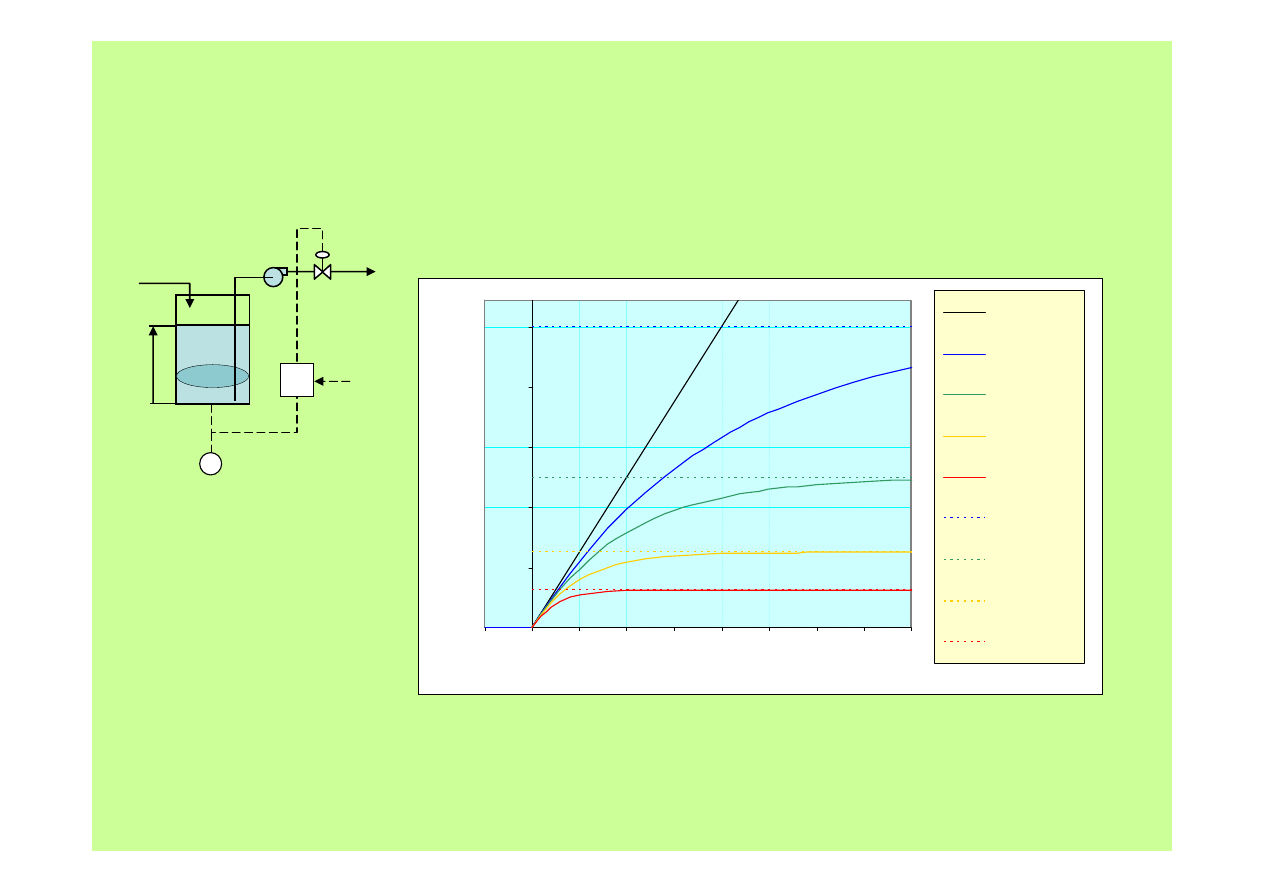
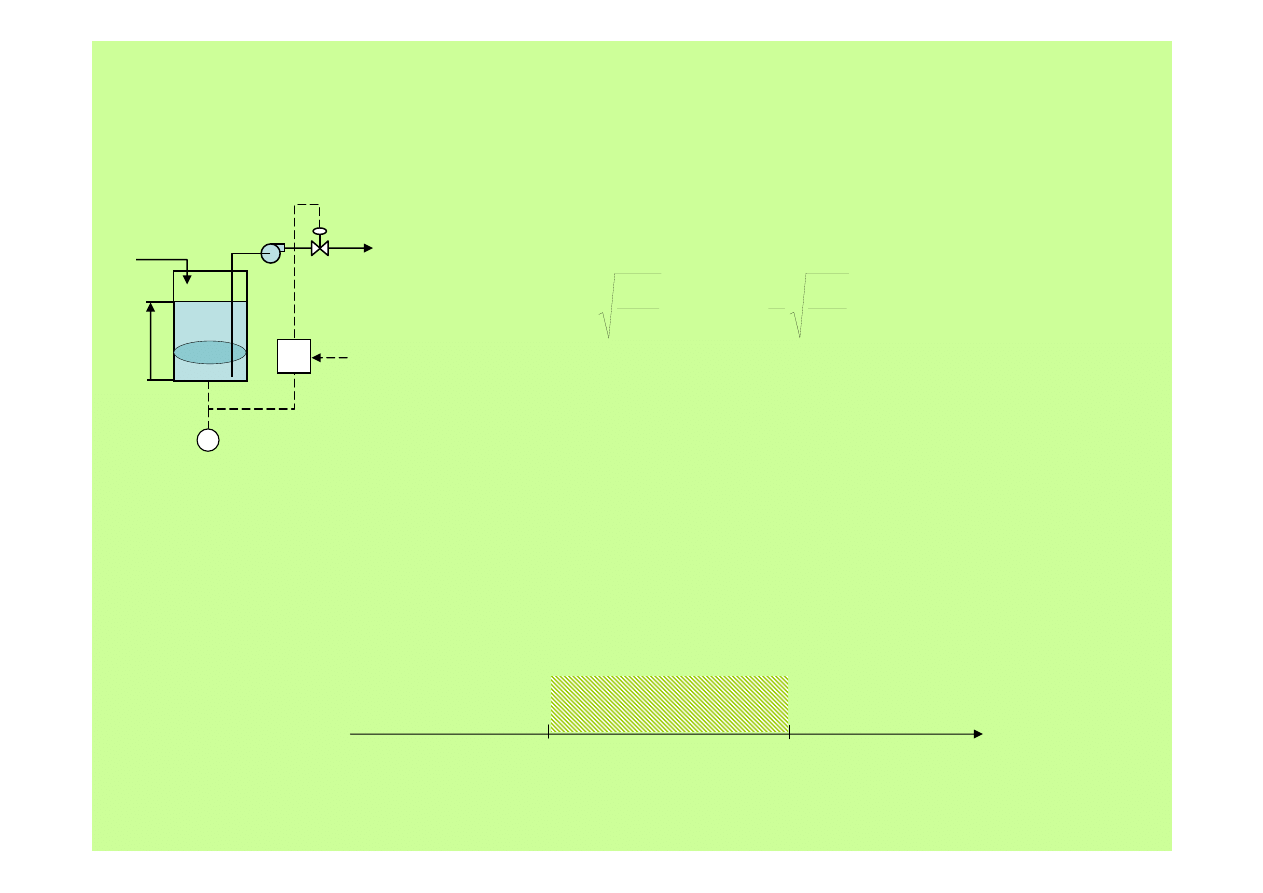
Metody regulacji
1. Regulacja proporcjonalna …
Q
IN
A
V
Q
OUT
h
R
h
z
0.0
0.2
0.4
0.6
0.8
1.0
-0.25
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
czas
uc
hy
b
bez regulacji
k = 1
k = 2
k = 4
k = 8
uchyb k = 1
k = 2
k = 4
k = 8
h
gdy k rośnie cor
az szybciej doch
odzimy do
stanu ustaloneg
o – maleje sta
ła czasowa T
28
Metody regulacji
1. Regulacja proporcjonalna zbiornika magazynującego
Q
IN
A
V
Q
OUT
h
R
h
z
tu z
adac
k =
∞
Czy nie wystarczyłby zatem regulator
proporcjonalny z bardzo dużym
(„nieskończonym”) wzmocnieniem?
h
Nie!
Gdyż wzmocnieniu uległyby również nie uwzględnione
w teorii zakłócenie (szumy) i rzeczywisty obiekt z taką
regulacją stałby się NIESTABILNY!
29
Metody regulacji
2. Regulacja
PI
zbiornika magazynującego
Q
OUT
Q
IN
A
V
h
R
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∆
+
∆
⋅
=
∫
t
I
OUT
hdt
T
h
k
Q
0
1
matematyczny
zapis
działania regul
acji PI
h
h
z
30
Metody regulacji
2. Regulacja PI zbiornika magazynującego
OUT
IN
Q
Q
dt
h
d
A
−
=
∆
1. Do bilansu cieczy
Q
IN
A
V
Q
OUT
h
R
h
z
h
2. Wstawiamy wzór na działanie regulatora PI
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∆
+
∆
⋅
−
=
∆
∫
t
I
IN
hdt
T
h
k
Q
dt
h
d
A
0
1
0
,
0
=
∆
=
h
t
3. Poddajemy równanie transformacji Laplace’a
h
s
T
k
h
k
Q
h
As
I
IN
∆
−
∆
⋅
−
=
∆
1
31
Metody regulacji
2. Regulacja PI zbiornika magazynującego
4. Porządkujemy
Q
IN
A
V
Q
OUT
h
R
h
z
IN
I
Q
s
T
k
k
As
h
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
∆
h
IN
Q
h /
∆
5. Wyliczamy
s
T
k
k
As
Q
h
I
IN
+
+
=
∆
1
(
)
1
2
+
+
=
∆
s
T
s
k
A
T
s
k
T
Q
h
I
I
I
IN
Otrzymany wynik oznacza, że rozpatrywany układ posiada dynamikę członu
drugiego rzędu – bez przymiotnika „inercyjny”.
O jego zachowaniu decydują wartości stojące przy s
2
i s.
32
Metody regulacji
2. Regulacja PI zbiornika magazynującego
Q
IN
A
V
Q
OUT
h
R
h
z
6. Aby korzystać z tablic transformacji Laplace’a
musimy otrzymanemu wyrażeniu nadać postać:
1
2
2
2
+
+
=
∆
s
T
s
T
Ks
Q
h
IN
ξ
h
lub
2
2
2
n
n
n
IN
s
s
s
K
Q
h
ω
ξ
ω
ω
+
+
=
∆
gdzie:
T
n
1
≡
ω
33
Metody regulacji
2. Regulacja PI zbiornika magazynującego
Q
IN
A
V
Q
OUT
h
R
h
z
7. W tym przypadku jest to możliwe, gdy:
A
k
T
k
A
T
T
I
I
2
1
;
=
=
ξ
h
T
-
stała czasowa
-
pulsacja własna
-
współczynnik tłumienia
n
ω
ξ
T
(zamiennie z ) decyduje o szybkości reakcji układu („żwawość”, „refleks”).
decyduje, czy w układzie wystąpią drgania czy nie.
ξ
n
ω
ξ
drgania
niestabilność
inercja
0
1
34
Metody regulacji
2. Regulacja PI zbiornika magazynującego – odpowiedź na skok Q
IN
= 1(t)
Q
IN
A
V
Q
OUT
h
R
h
z
A
k
T
k
A
T
T
I
I
2
1
;
=
=
ξ
-0.5
-0.3
-0.1
0.1
0.3
0.5
0.7
-1
0
1
2
3
4
5
6
7
8
9
10
czas
uc
hy
b
0.2
0.4
0.8
1.6
3.2
T = const
ξ
h
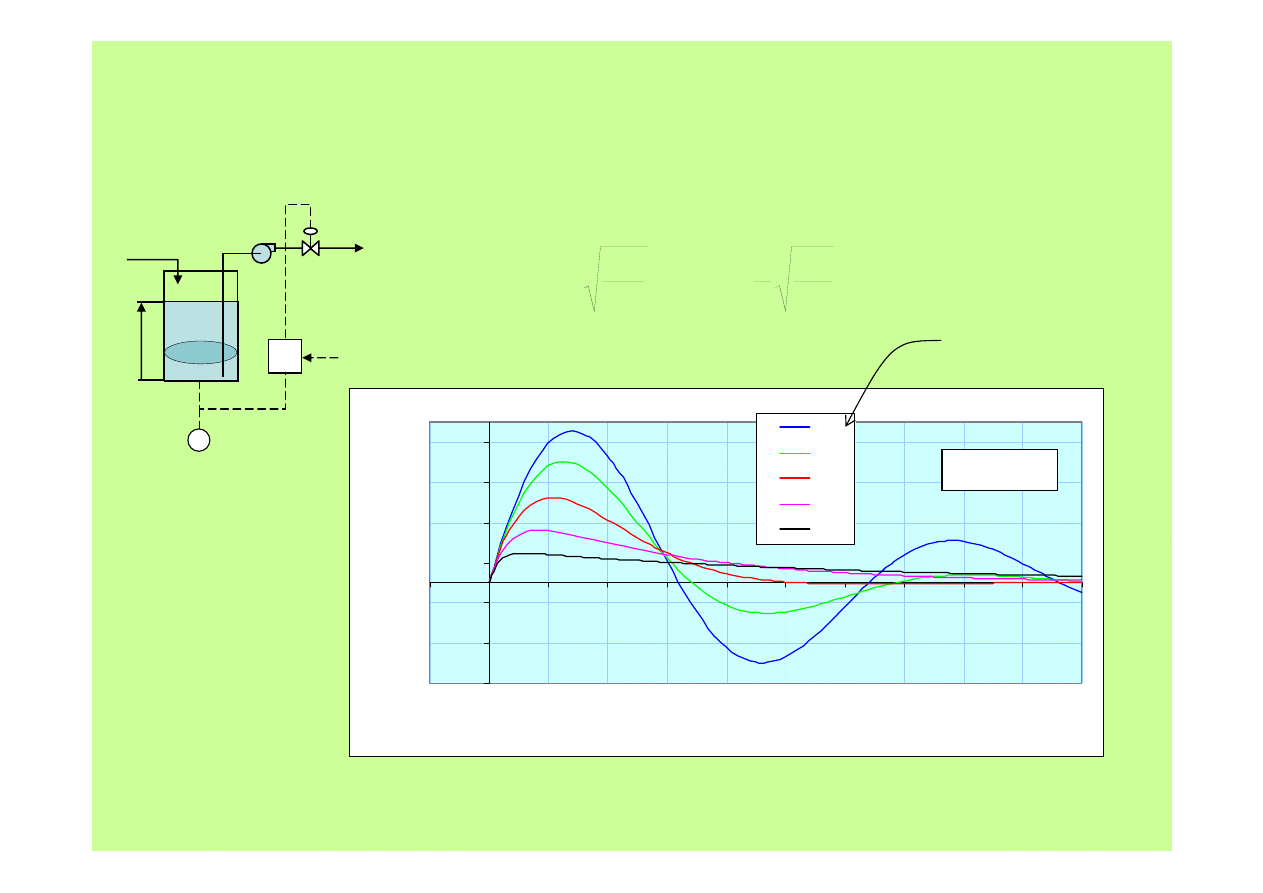
35
Metody regulacji
2. Regulacja PI zbiornika magazynującego – odpowiedź na skok Q
IN
= 1(t)
Q
IN
A
V
Q
OUT
h
R
h
z
A
k
T
k
A
T
T
I
I
2
1
;
=
=
ξ
-0.5
-0.3
-0.1
0.1
0.3
0.5
0.7
-1
0
1
2
3
4
5
6
7
8
9
10
czas
u
c
hy
b
0.25
0.5
1
2
4
T
4
.
0
=
ξ
h
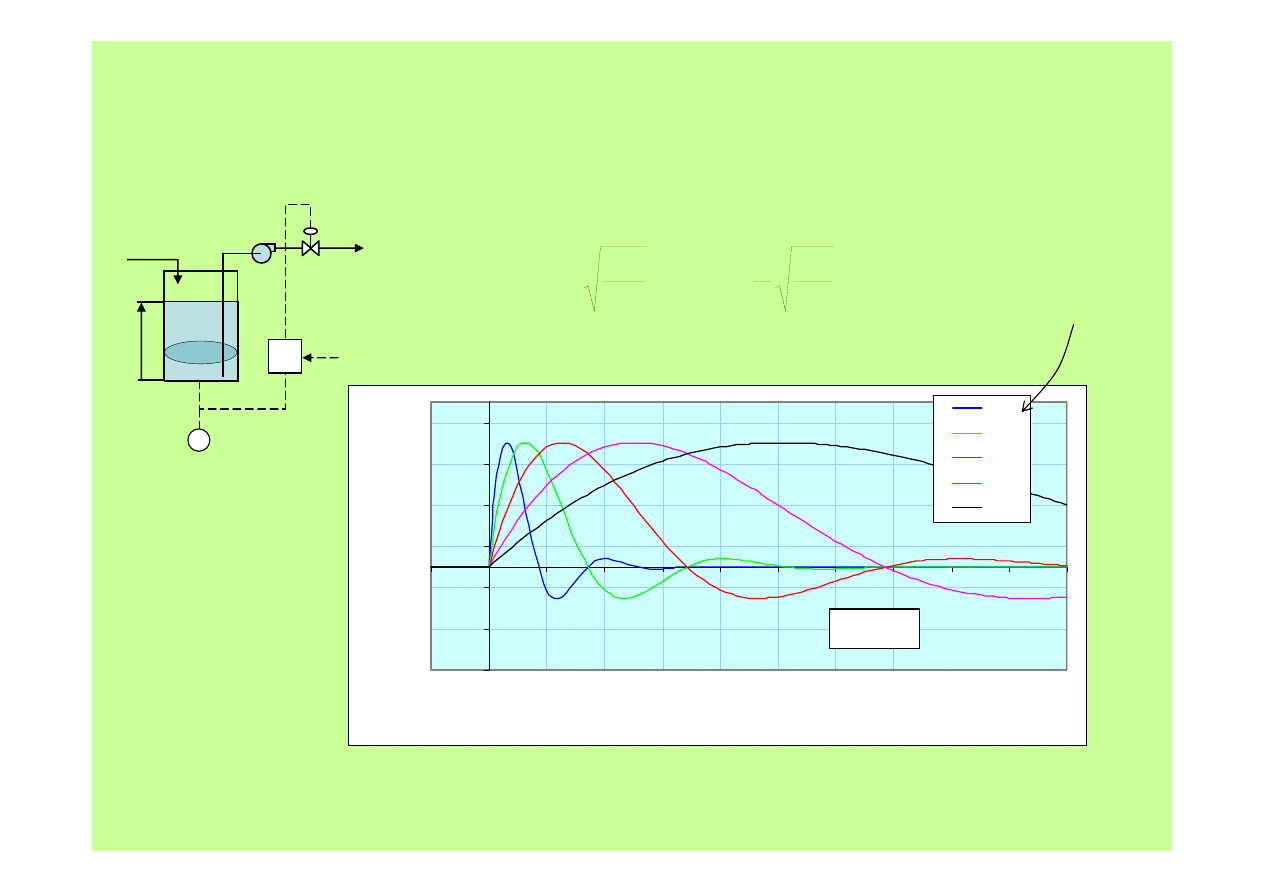
36
Metody regulacji
2. Regulacja PI zbiornika magazynującego
Q
OUT
Q
IN
A
V
h
R
h
h
z
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∆
+
∆
⋅
=
∫
t
I
OUT
hdt
T
h
k
Q
0
1
Dobór nas
taw k i T
I
regulatora
nosi nazw
ę
strojenia
i jest w du
żej mierze
sztuką.
37
Metody regulacji
2. Regulacja
PID
zbiornika magazynującego
Q
OUT
Q
IN
A
V
h
R
h
h
z
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∆
+
∆
+
∆
⋅
=
∫
t
D
I
OUT
dt
h
d
T
hdt
T
h
k
Q
0
1
matematyczny
zapis
działania regul
acji PID
38
Metody regulacji
2. Regulacja
PID
zbiornika magazynującego
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
∆
−
=
∆
s
kT
s
T
k
k
h
Q
h
As
D
I
IN
Q
IN
A
V
Q
OUT
h
R
h
z
(
)
IN
D
I
Q
s
A
kT
s
T
k
k
h
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
+
∆
h
(
)
s
A
kT
s
T
k
k
Q
h
D
I
IN
+
+
+
=
∆
1
(
)
(
)
1
2
+
+
+
=
∆
s
T
s
k
A
kT
T
s
k
T
Q
h
I
D
I
I
IN
Nie warto
dalej przek
ształca
ć
Stwierdzamy (z pewnym zdziwieniem), że wprowadzenie różniczkowania
do regulacji nie przynosi
jakościowej
zmiany – szykuje się też II-gi rząd, tylko
trochę inny!
39
Metody regulacji
2. Regulacja
PID
zbiornika magazynującego
Q
IN
A
V
Q
OUT
h
R
h
z
Rzeczyw
iście, w
wielu pr
zypadka
ch
wprowa
dzenie r
óżniczk
owania
do układ
u
regulacj
i nie pop
rawia je
j i jest b
ezcelow
e.
Ale f
ajnie
! Nie
będz
iemy
nicze
go da
lej wy
prow
adza
ć
h
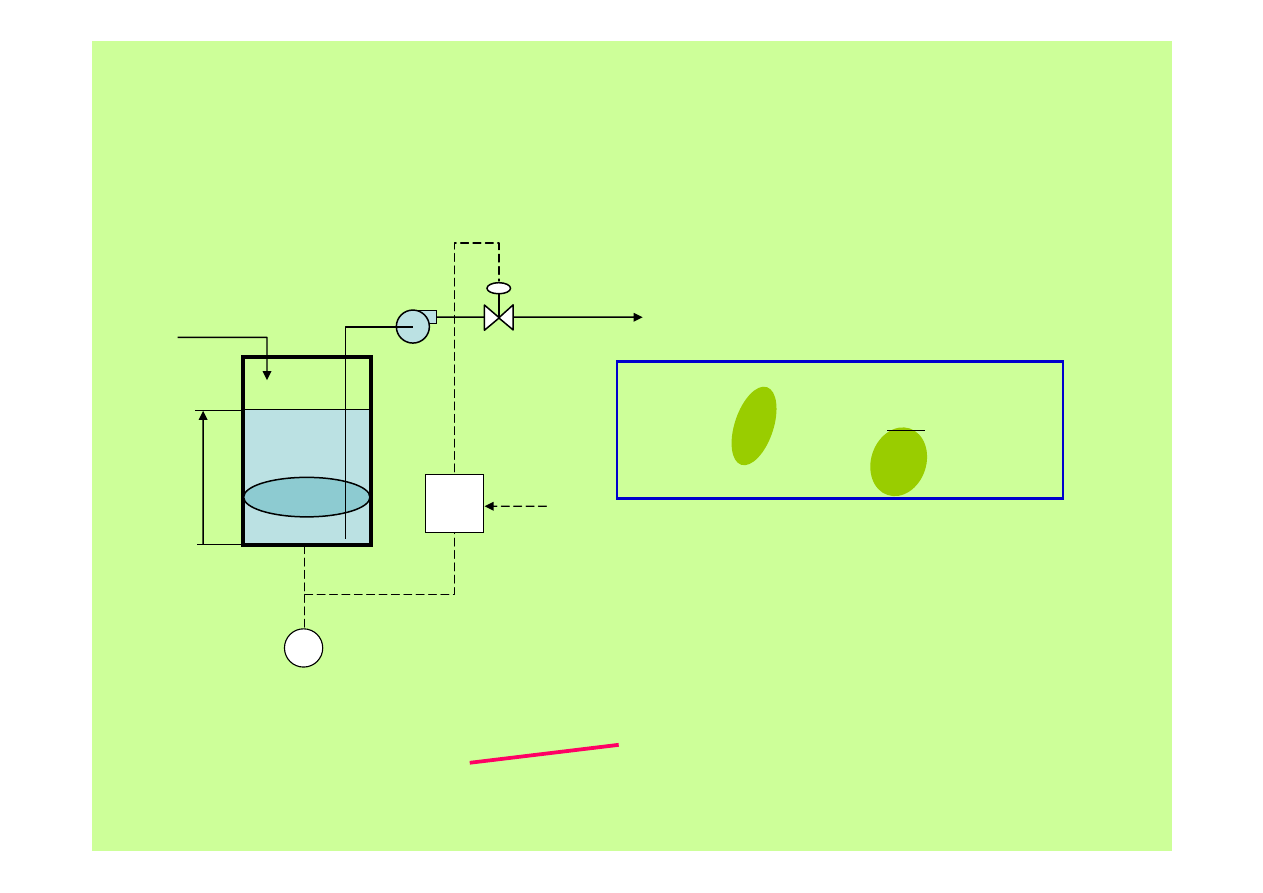
40
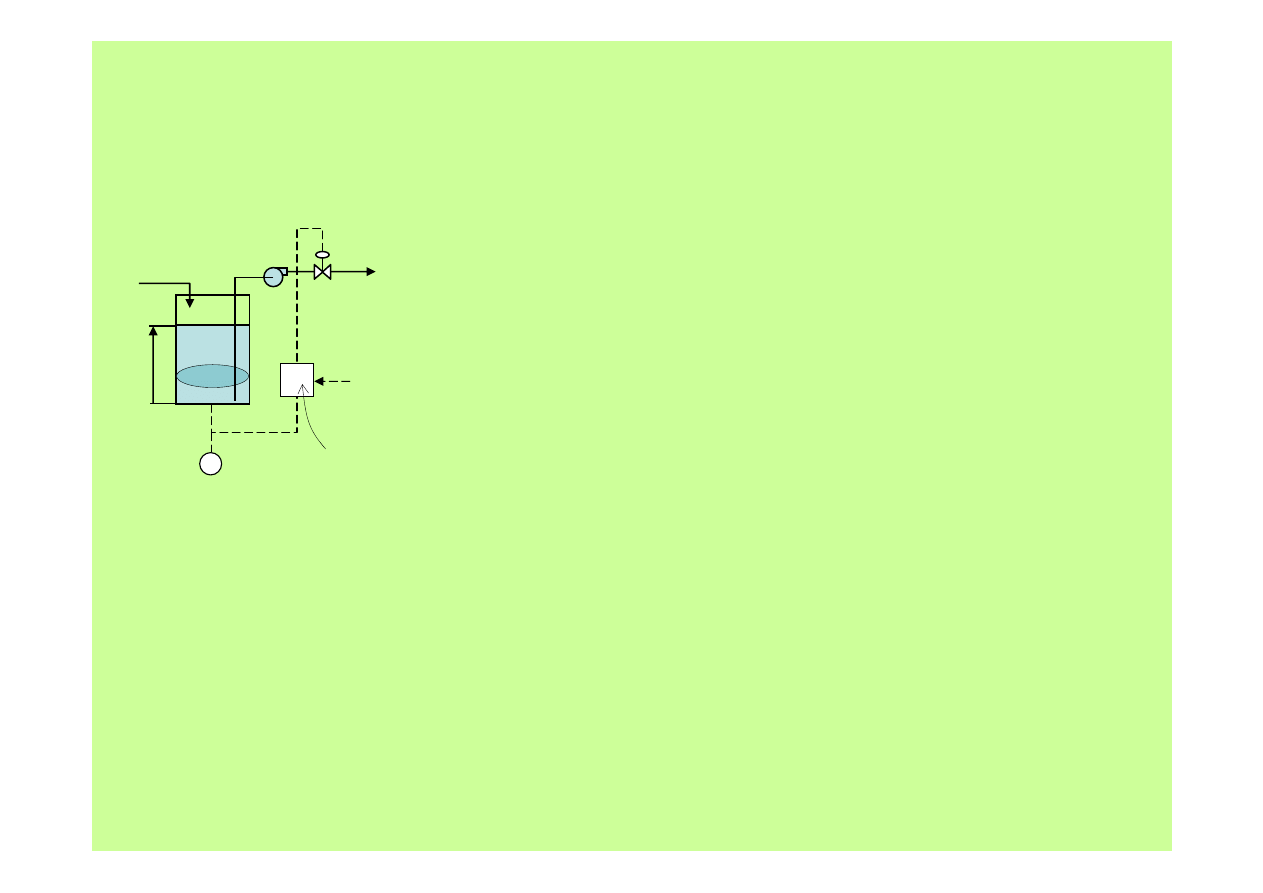
Regulacja
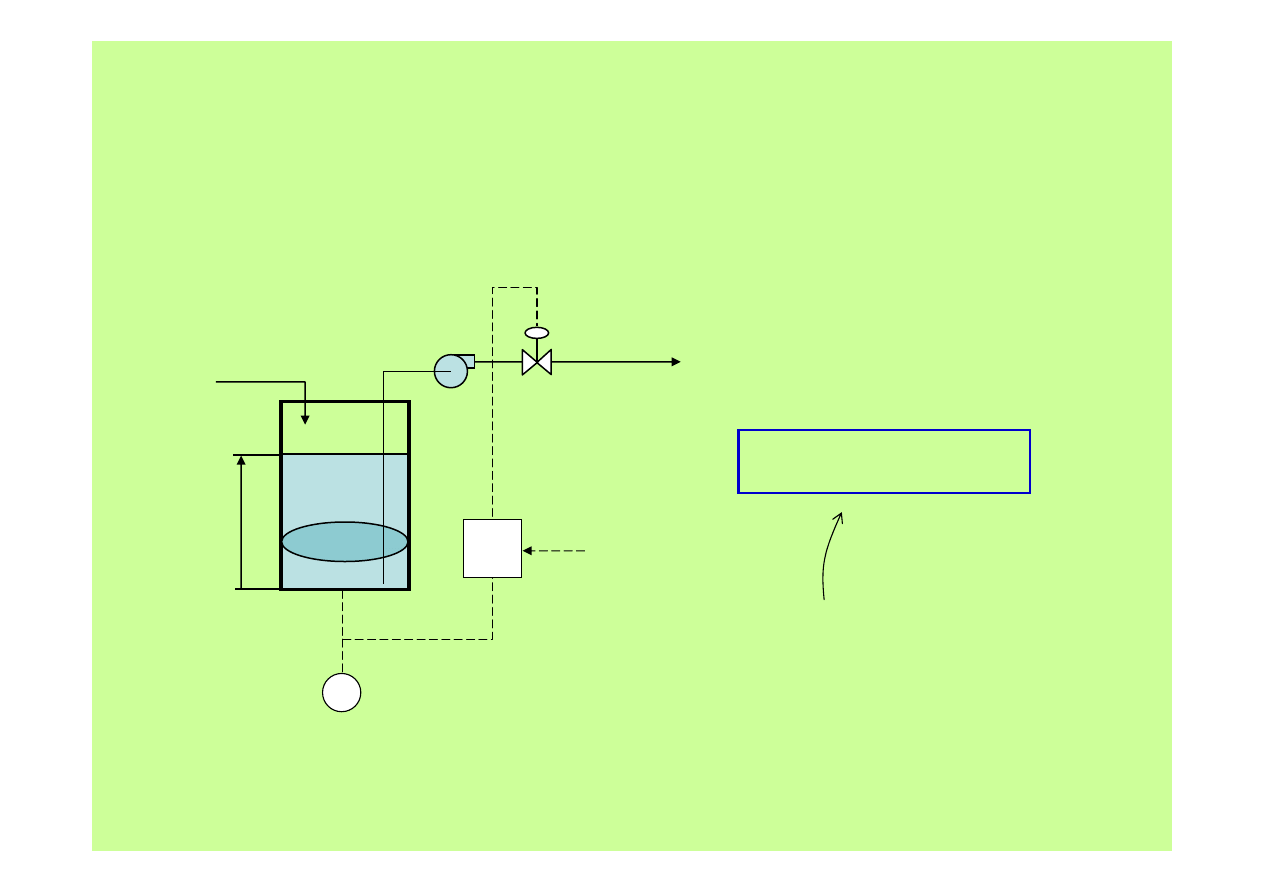
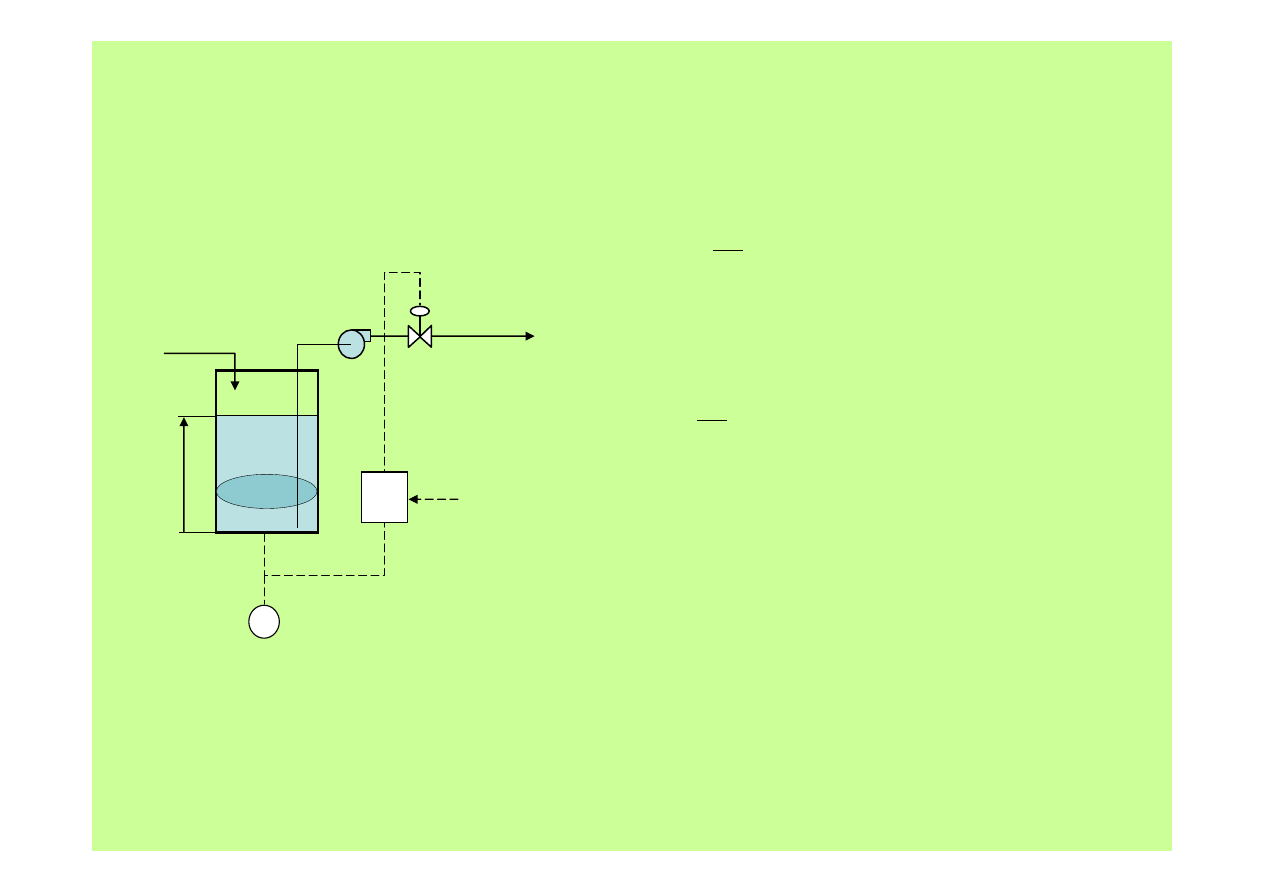
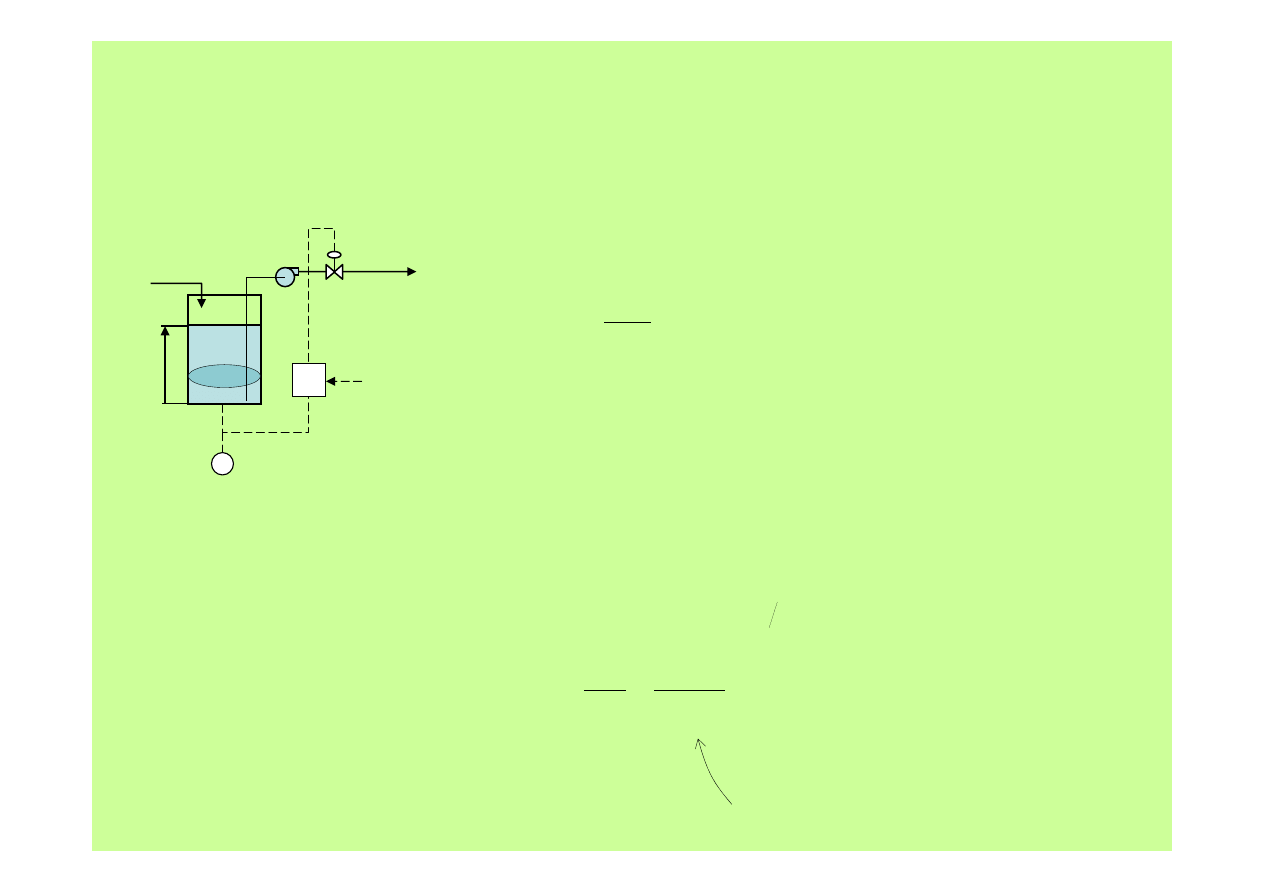
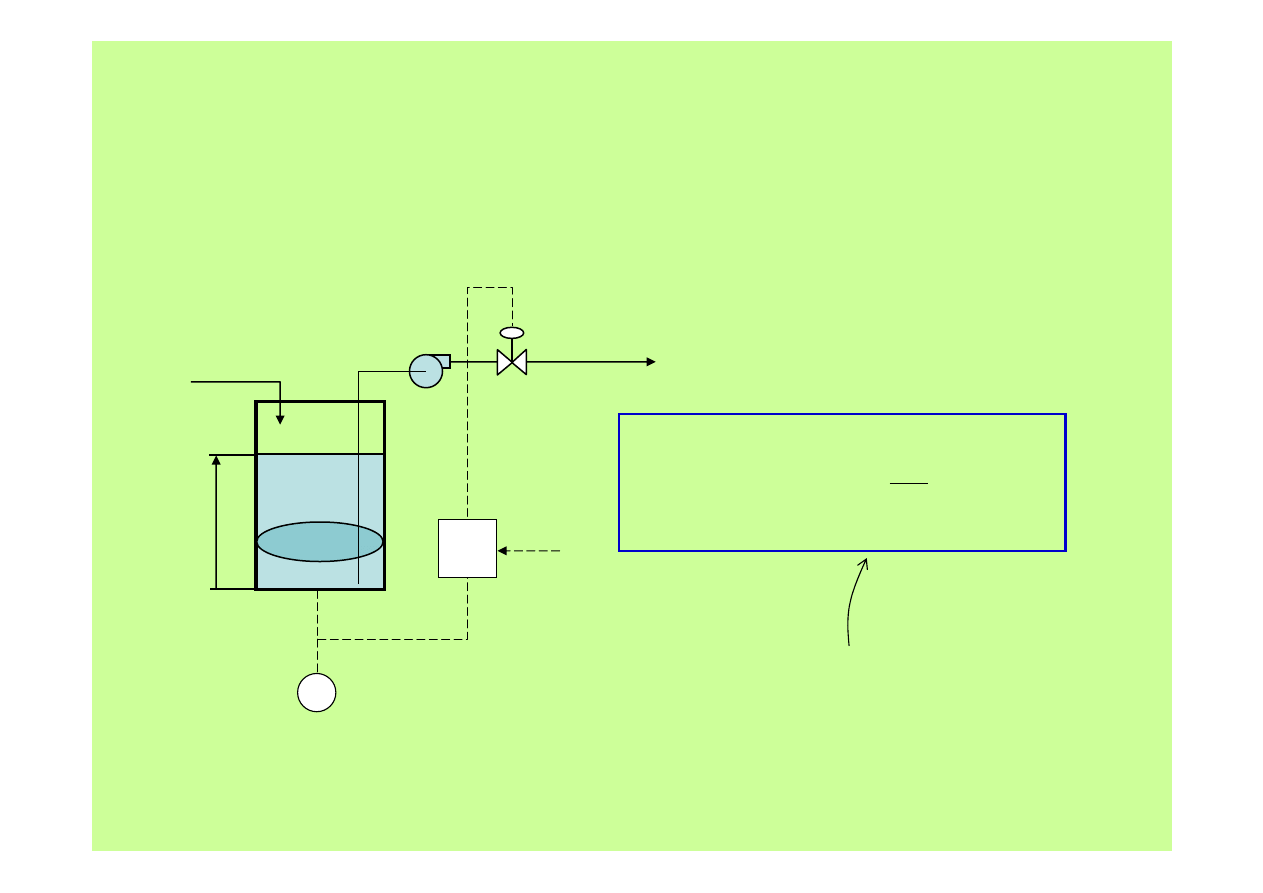
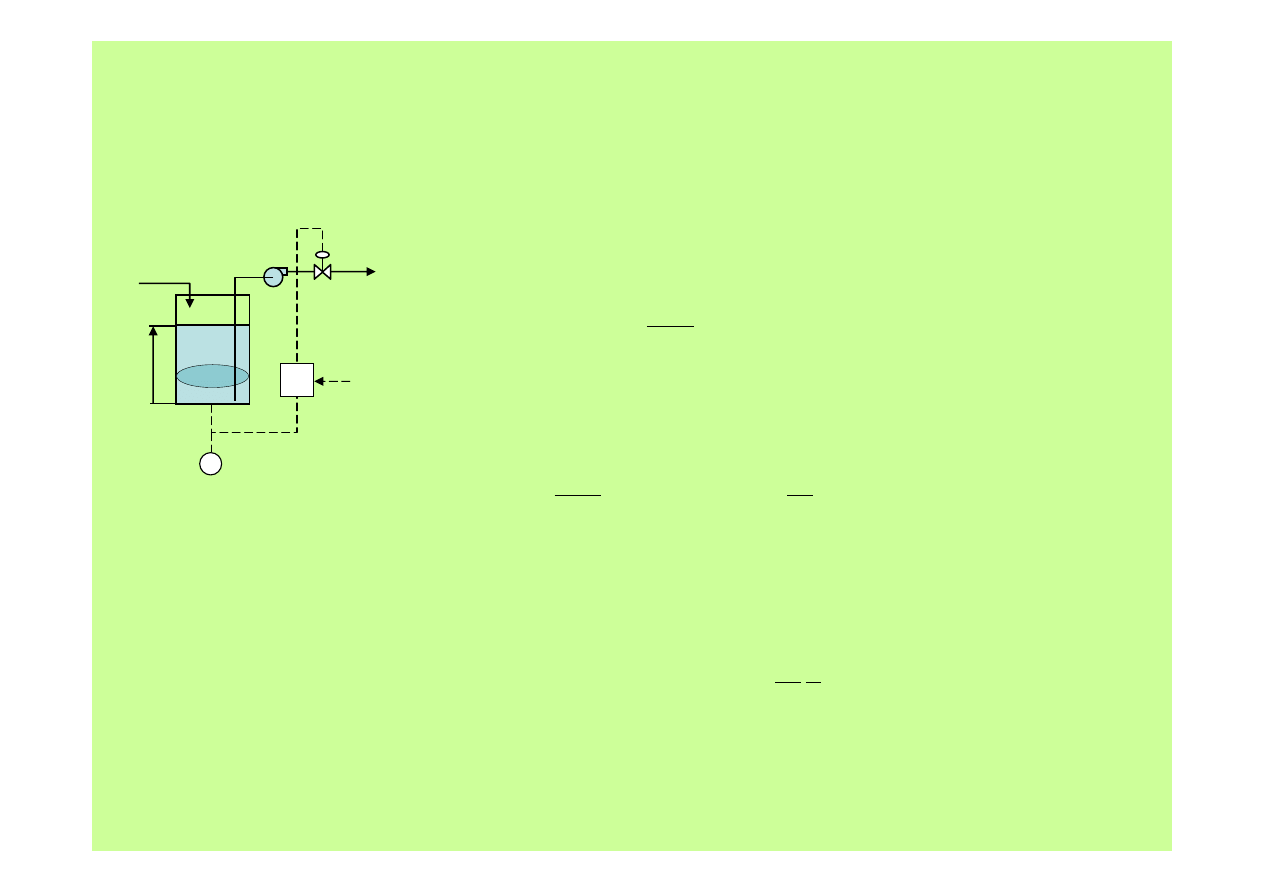
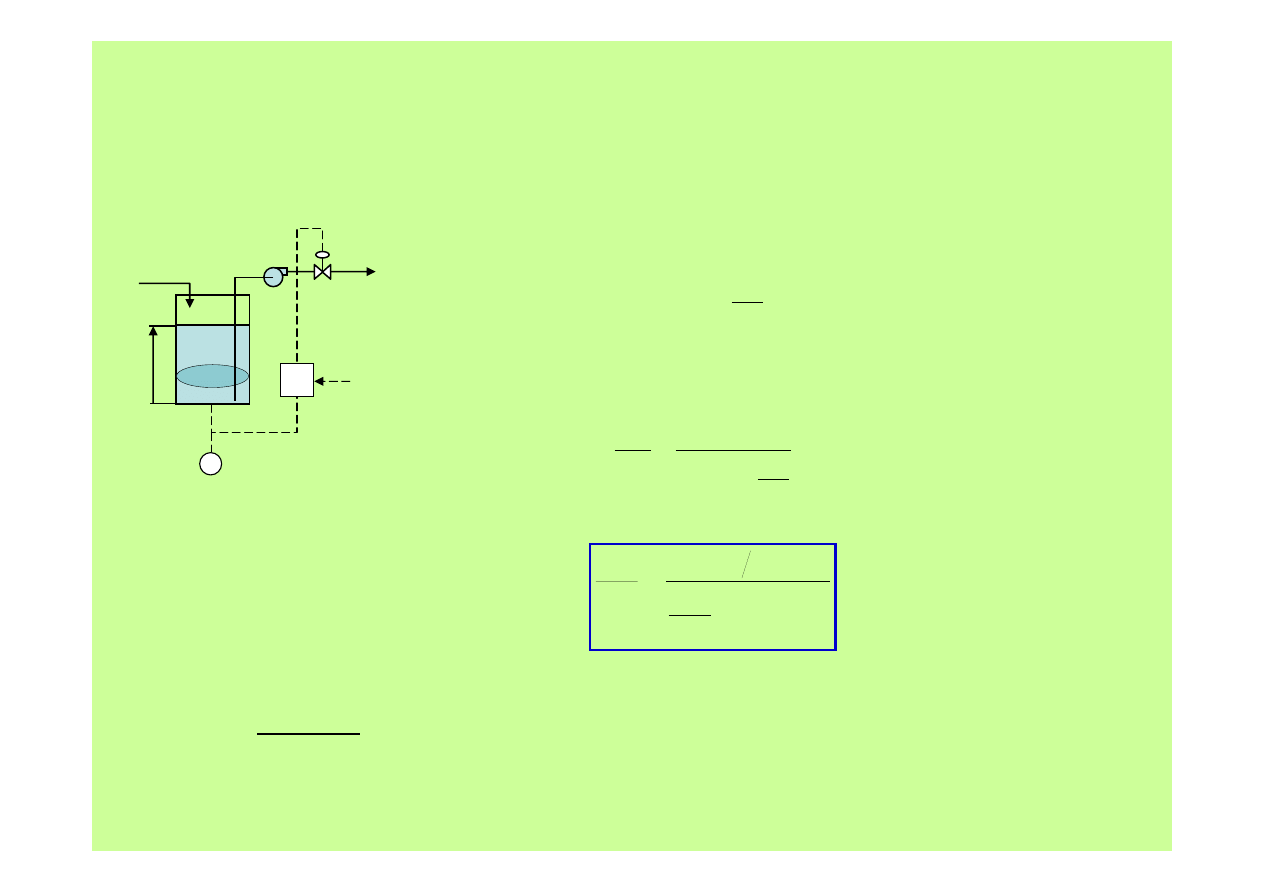
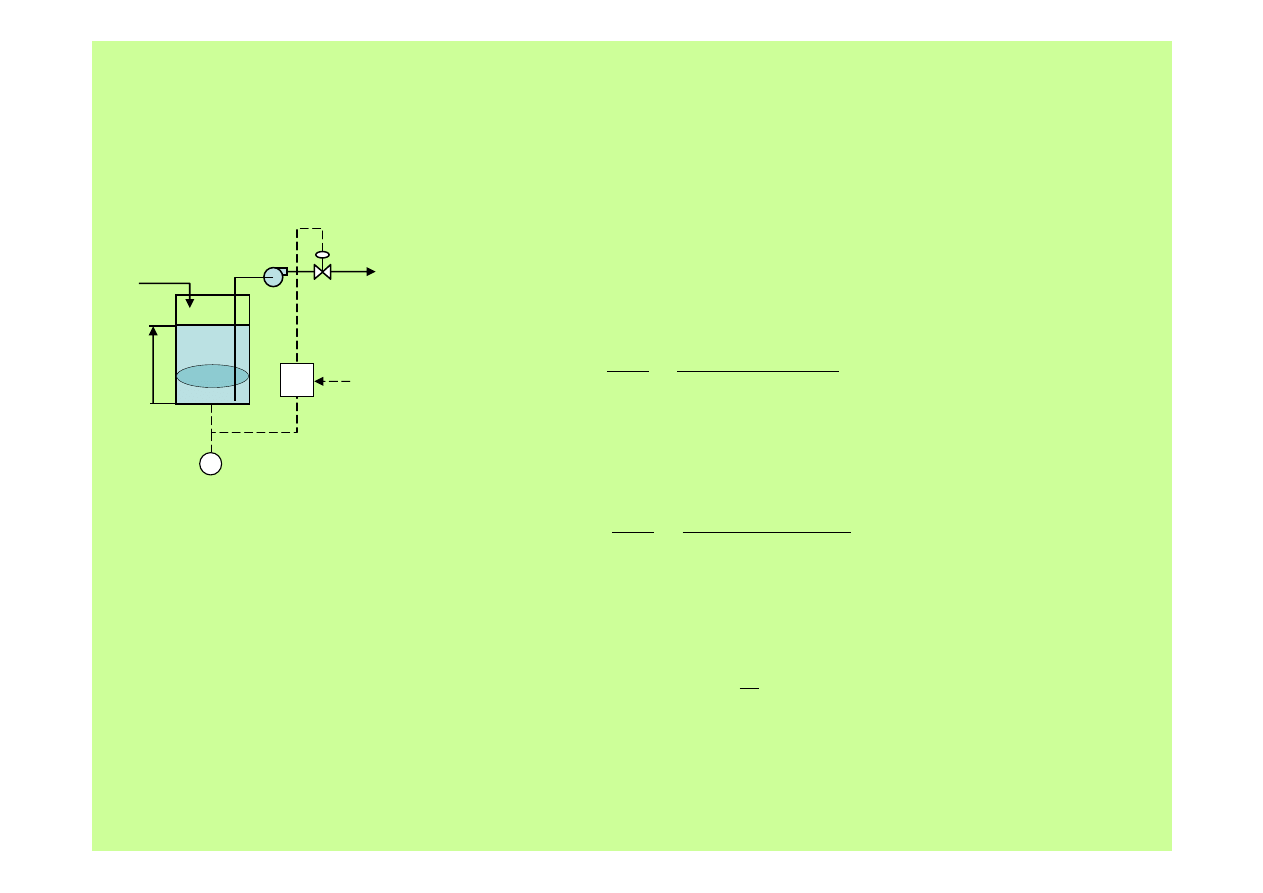
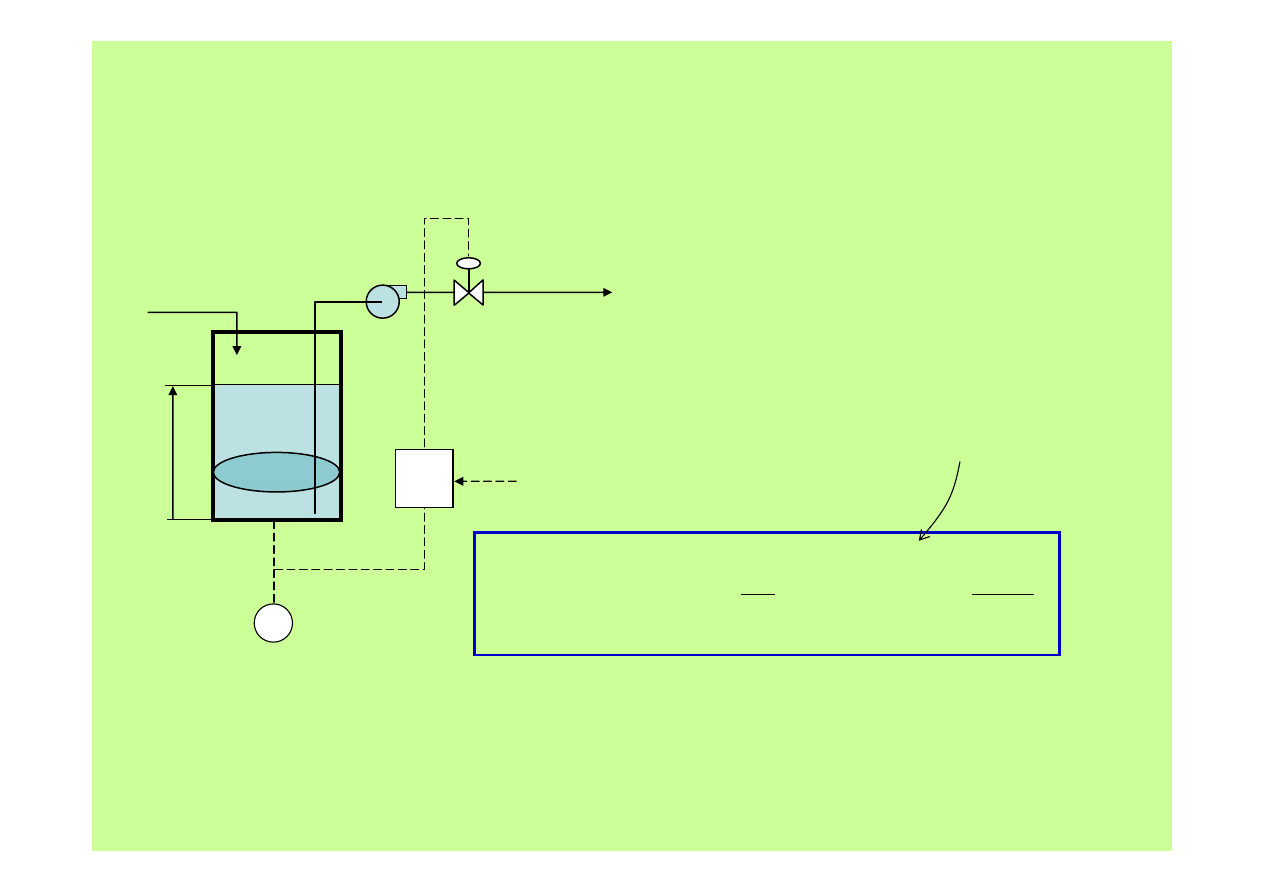
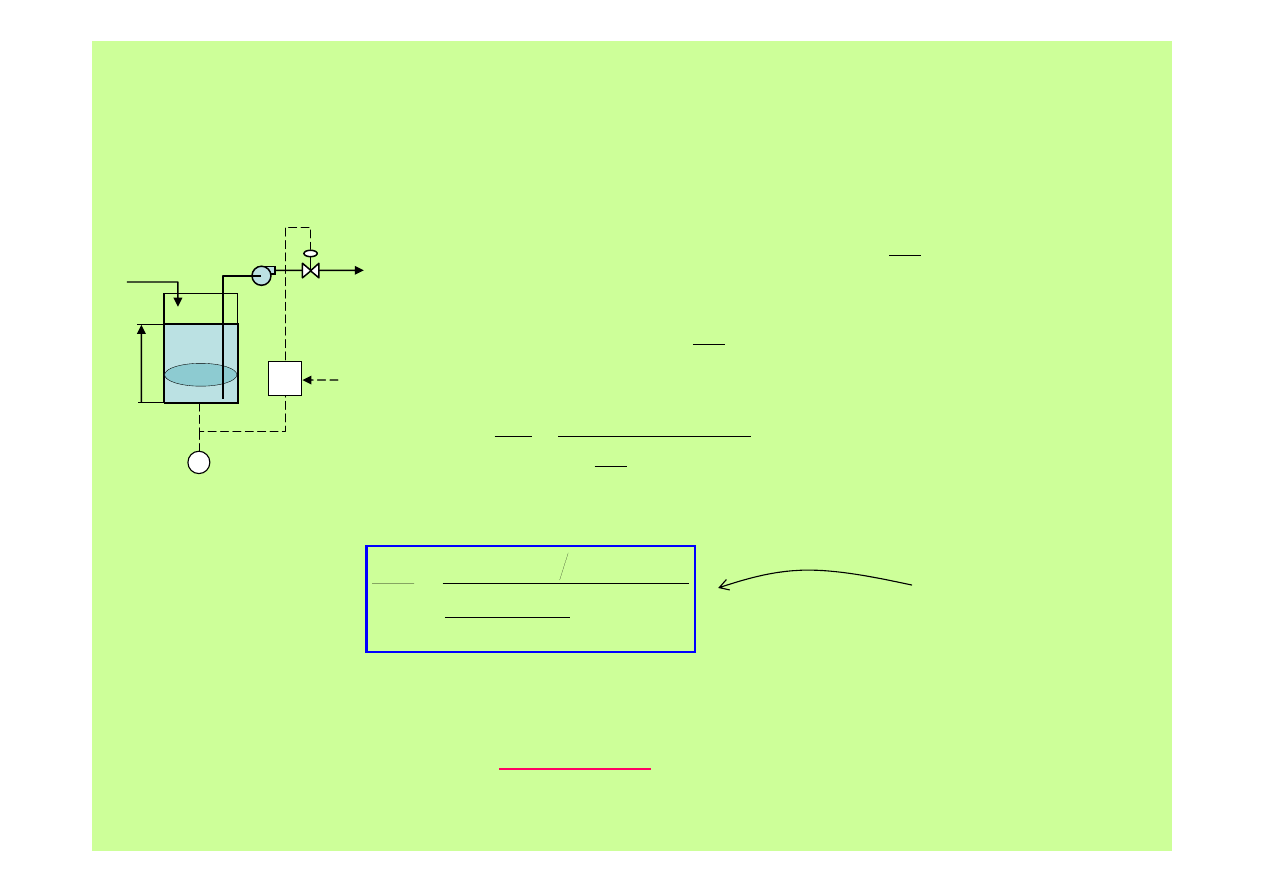
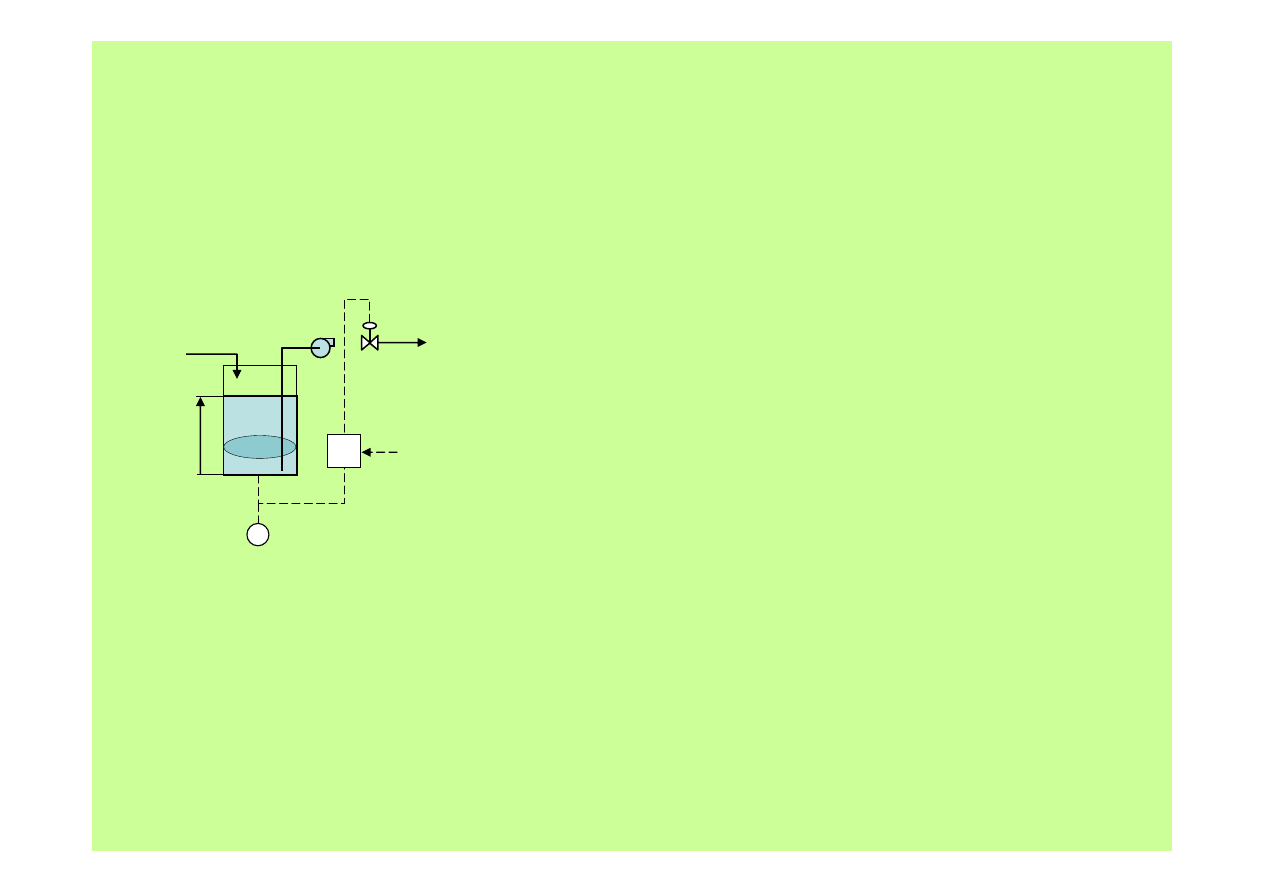
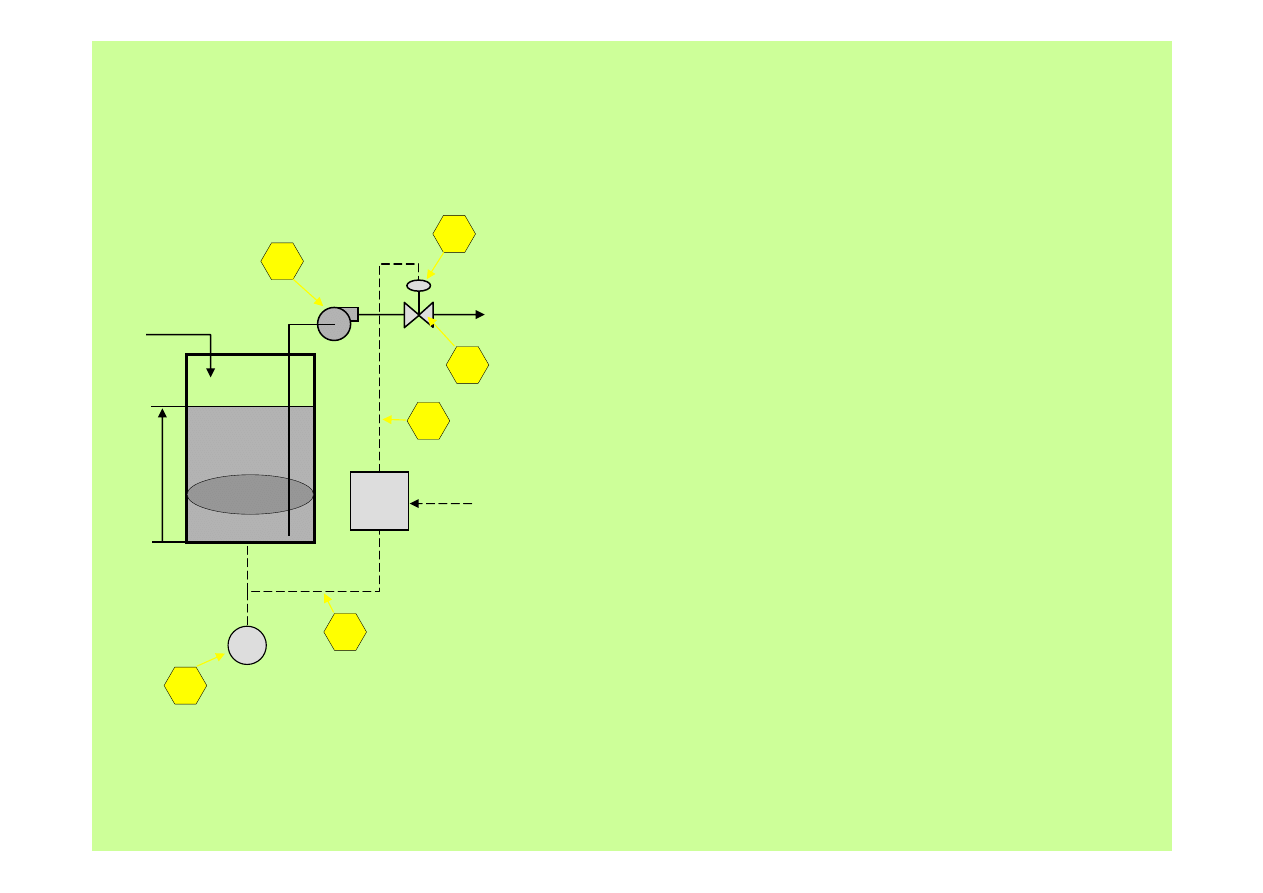
3. Trochę realizmu
1 – miernik poziomu cieczy, mierzy z określoną
dokładnością, ma własną dynamikę.
2 – linia przesyłowa z miernika do regulatora,
wprowadza szumy i może opóźniać.
3 – linia sygnału z regulatora do elementu
wykonawczego, to samo.
4 – element wykonawczy (siłownik), jako urządzenie
mechaniczne, ma własną dynamikę i zapewne
tzw. histerezę tzn. ruch „do góry” przebiega po
nieco innej drodze niż ruch „w dół”.
5 – zawór, nie reaguje natychmiast na ruch siłownika.
6 – pompa, nie może natychmiast dostosować się
do stanu otwarcia zaworu.
Q
IN
A
V
Q
OUT
h
R
1
2
h
h
z
3
4
5
6
Wszystko to powoduje, że
regulacja mimo
rozbudowanej teorii jest ci
ągle
sztuką
.
41
Regulacja
4. Ważna refleksja
Wszystkie pokazane tu zagadnienia obowiązują (i są tak samo
proste lub skomplikowane) niezależnie od
budowy regulatora
.
Regulator może być:
• człowiekiem
• XIX-to wiecznym mechanizmem
• XX-to wiecznym elektro-, hydro- lub pneumomechanizmem
• XXI-szo wiecznym cudem elektroniczno-cyfrowym
tzw.
awta
mat
s ma
lczik
am
Zawsze trzeba znać obiekt
poddany regulacji
oraz podjąć decyzję co do
strategii i metody
jego sterowania.
42
Podsumowanie
Dynamika i automatyka ma jeszcze wiele
nieporuszonych tu zagadnień i problemów
ale w tym kursie to już koniec.
Ufff
f…
43
Dziękuję
Do zobaczenia
na kolokwium
???!!!
…
44
Koniec cz. III ostatniej
Wyszukiwarka
Podobne podstrony:
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
analiza ryzyka bio id 61320 Nieznany
pedagogika ogolna id 353595 Nieznany
Misc3 id 302777 Nieznany
cw med 5 id 122239 Nieznany
D20031152Lj id 130579 Nieznany
mechanika 3 id 290735 Nieznany
więcej podobnych podstron