„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Adrian Mikołajczak
Analizowanie struktury układu regulacji i charakterystyk
regulatorów 731[01].Z1.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
prof. PŁ dr hab. inż. Krzysztof Pacholski
mgr inż. Jerzy Kozłowicz
Opracowanie redakcyjne:
mgr inż. Adrian Mikołajczak
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 731[01].Z1.01
„Analizowanie struktury układu regulacji i charakterystyk regulatorów”, zawartego
w modułowym programie nauczania dla zawodu mechanik automatyki przemysłowej
i urządzeń precyzyjnych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
3
2.
5
3.
6
4.
Wprowadzenie
Wymagania wstępne
Cele kształcenia
Materiał nauczania
7
4.1. Właściwości układów regulacji automatycznej
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
10
4.1.3. Ćwiczenia
10
4.1.4. Sprawdzian postępów
12
4.2. Charakterystyka statyczna układu regulacji
13
4.2.1. Materiał nauczania
13
4.2.2. Pytania sprawdzające
14
4.2.3. Ćwiczenia
14
4.2.4. Sprawdzian postępów
17
4.3. Charakterystyki dynamiczne członów układu regulacji
18
4.3.1. Materiał nauczania
18
4.3.2. Pytania sprawdzające
22
4.3.3. Ćwiczenia
22
4.3.4. Sprawdzian postępów
25
4.4. Przebiegi przejściowe układów regulacji
26
4.4.1. Materiał nauczania
26
4.4.2. Pytania sprawdzające
29
4.4.3. Ćwiczenia
30
4.4.4. Sprawdzian postępów
31
4.5. Dobór nastaw regulatorów
32
4.5.1. Materiał nauczania
32
4.5.2. Pytania sprawdzające
37
4.5.3. Ćwiczenia
37
4.5.4. Sprawdzian postępów
39
5.
Sprawdzian osiągnięć
40
6.
Literatura
46

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy na temat analizowania struktury
układu regulacji i charakterystyk regulatorów.
W poradniku zamieszczono:
−
wymagania wstępne, czyli wykaz umiejętności, jakie powinieneś umieć przed
przystąpieniem do nauki,
−
cele kształcenia, jakie powinieneś osiągnąć w czasie zajęć edukacyjnych tej jednostki
modułowej,
−
materiał nauczania – czyli wiadomości teoretyczne dotyczące właściwości elementów
i układów regulacji, wyznaczania charakterystyk statycznych i dynamicznych,
właściwości regulatorów wraz z metodami doboru ich nastaw,
−
zestawy pytań, które pomogą Ci sprawdzić, czy opanowałeś podane treści nauczania,
−
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć. Zaliczenie testu potwierdzi opanowanie materiału całej jednostki
modułowej,
−
wykaz literatury uzupełniającej.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
731[01].Z1
Podstawy regulacji
i wykorzystanie techniki
komputerowej w automatyce
731[01].Z1.01
Analizowanie struktury układu
regulacji i charakterystyk
regulatorów
731[01].Z1.02
Stosowanie sterowników
i komputerów w automatyce

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
korzystać z różnych źródeł informacji,
−
stosować jednostki układu SI,
−
przeliczać jednostki,
−
posługiwać się podstawowymi pojęciami związanymi z wykresem funkcji,
−
użytkować komputer,
−
wykonywać pomiary przemysłowe,
−
badać układy elektryczne i elektroniczne,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3.
CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
zdefiniować podstawowe pojęcia związane z układem regulacji,
−
wyjaśnić pojęcie sprzężenia zwrotnego i jego wpływ na proces regulacji,
−
odczytać schematy blokowe automatyki,
−
rozróżnić symbole członów automatyki,
−
wyznaczyć wielkości opisujące charakterystykę statyczną członu automatyki,
−
określić metody wyznaczania charakterystyk dynamicznych członów,
−
objaśnić cechy blokowego systemu automatyki,
−
rozpoznać charakterystyki różnych regulatorów,
−
scharakteryzować typy układów regulacji,
−
określić na podstawie charakterystyk statycznych i dynamicznych: wzmocnienie,
nieczułość, stałą czasową,
−
określić stabilność układu regulacji,
−
zastosować metody doboru nastaw regulatora.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Właściwości układów regulacji automatycznej
4.1.1. Materiał nauczania
Sterowaniem nazywa się oddziaływanie na dany obiekt, w sposób zamierzony, mający
doprowadzić do spełnienia określonego celu. Sterowanie dzielimy na:
−
ręczne
−
realizowane przez człowieka z ewentualnym pomocniczym udziałem urządzeń,
−
automatyczne
−
realizowane przez urządzenia bez bezpośredniego udziału człowieka.
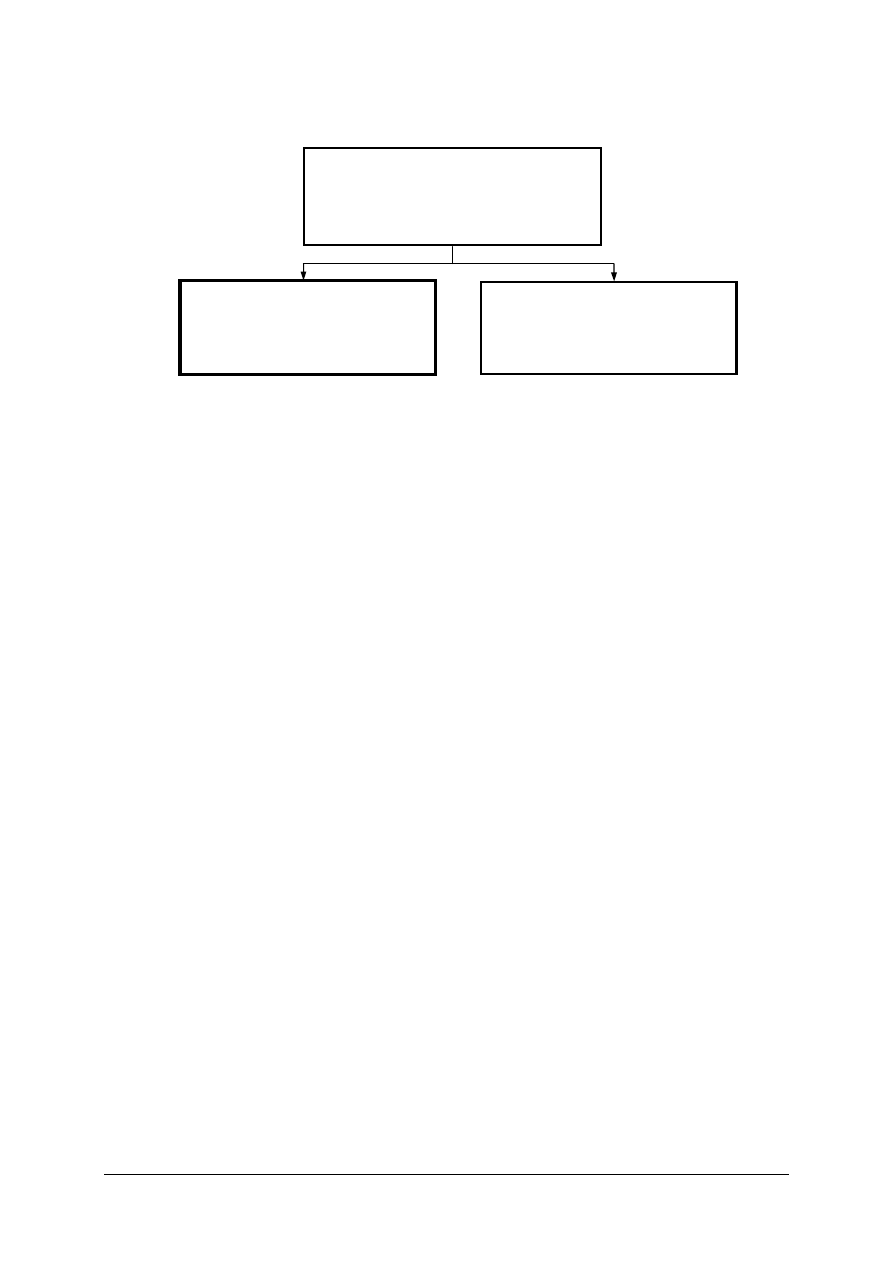
Rozróżniamy dwa podstawowe układy sterowania:
−
układ otwarty – urządzenie sterujące nie otrzymuje informacji o aktualnej wartości
wielkości sterowanej (rys. 1),
−
układ zamknięty – urządzenie sterujące otrzymuje informację o aktualnej wartości
wielkości regulowanej, to znaczy obiekt oddziaływuje na urządzenie sterujące (rys. 2).
Rys. 1. Układ otwarty sterowania (x – wielkość sterująca, y – wielkość
sterowana, z – zakłócenie) [opracowanie własne]
Rys. 2. Układ zamknięty sterowania – regulacja (x – wielkość sterująca, y – wielkość
regulowana, z – zakłócenie) [opracowanie własne]
Obiekt, na który wywiera się oddziaływanie sterujące, nazywa się obiektem sterowanym.
Urządzeniem sterującym jest ta część układu, która przez element wykonawczy oddziaływuje
na obiekt sterowania. W skład urządzenia sterującego wchodzą urządzenia wejścia (na
przykład łączniki, przyciski, czujniki), człony realizujące funkcje logiczne i urządzenia
wyjścia (przekaźniki, styczniki, tranzystory mocy, tyrystory, zawory). Czynniki o charakterze
przypadkowym, niezamierzonym, niekontrolowanym, utrudniające sterowanie, nazywa się
zakłóceniami.
Regulacja jest to sterowanie ze sprzężeniem zwrotnym. Sprzężeniem zwrotnym
nazywamy oddziaływanie wsteczne (zwrotne) wielkości regulowanej na wielkość regulującą,
które powinno być tak dobrane, by przeciwdziałało zmianom wielkości regulowanej
(na przykład pod wpływem zwiększenia temperatury w obiekcie urządzenie sterujące
zmniejsza dopływ energii, co powoduje spadek temperatury). Oddziaływanie takie nazywamy
ujemnym sprzężeniem zwrotnym
−
charakteryzuje wszystkie układy regulacji.
W celu łatwiejszego i szybszego zrozumienia działania układu regulacji automatycznej
można przedstawić go za pomocą schematu blokowego. Taki schemat buduje
się po wydzieleniu poszczególnych elementów lub podzespołów składowych układu
i narysowaniu ich w postaci odrębnych bloków połączonych ze sobą zgodnie ze spełnianymi
zadaniami. Oddziaływanie jednych podzespołów lub elementów układu na drugie jest
Urządzenie
sterujące
Obiekt
z
x
y
Urządzenie
sterujące
Obiekt
z
x
y
kierunek przepływu informacji
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
przedstawione na schemacie blokowym przez odpowiednie połączenia bloków i pokazanie
za pomocą strzałek kierunku przepływu informacji. Bloki rysuje się w postaci prostokątów
umieszczając wewnątrz dodatkowe informacje dotyczące ich właściwości (na przykład
zależności matematyczne lub charakterystyki graficzne). Należy pamiętać, że podział na bloki
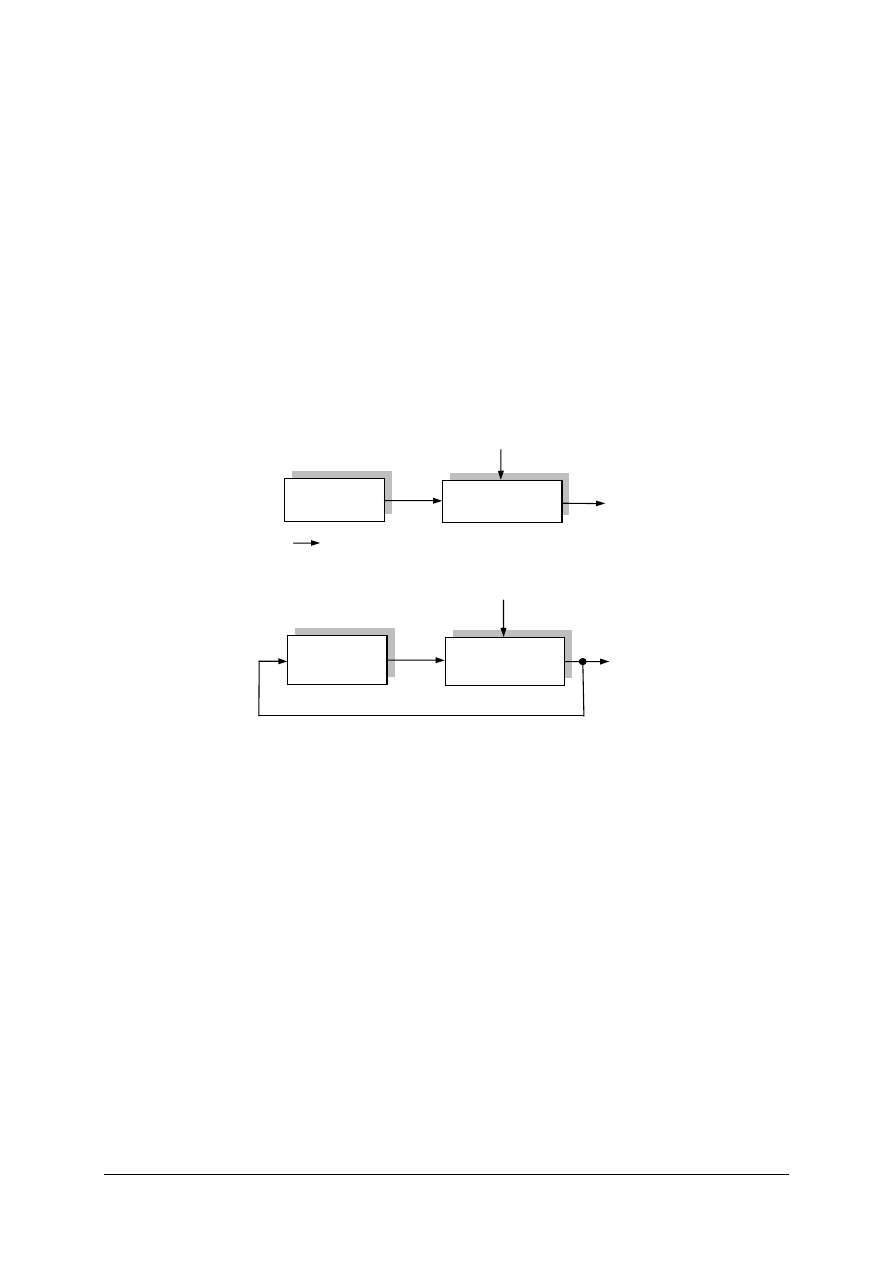
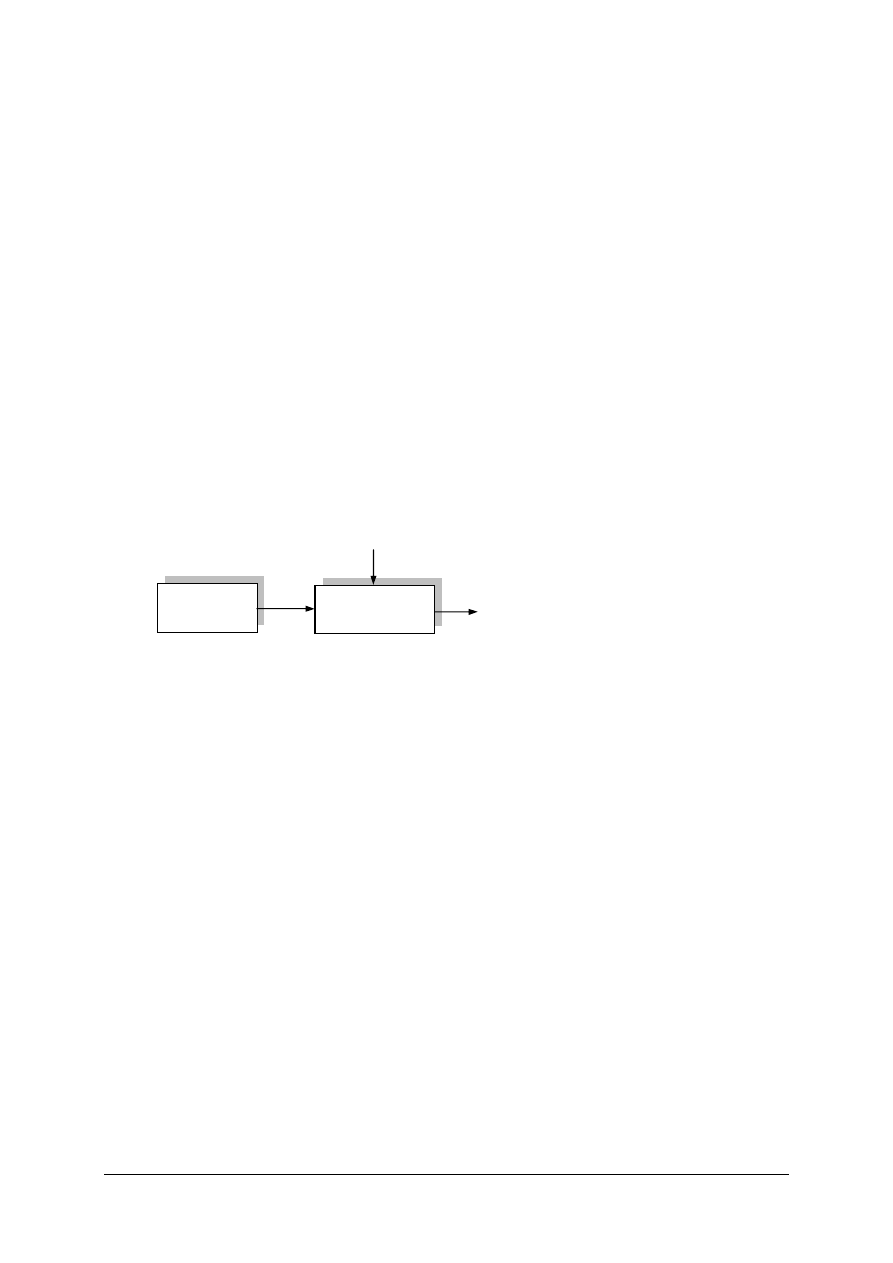
nie musi odpowiadać podziałowi na urządzenia. Podstawowymi członami układu regulacji są
obiekt regulacji oraz regulator (rys. 3).
Rys. 3. Ogólny schemat blokowy układu regulacji; opracowano na podstawie [2, s. 78]
Regulatorem nazywamy urządzenie, którego zadaniem jest porównanie wartości
rzeczywistej z wartością zadaną i wytworzenie sygnału oddziałującego na obiekt w taki
sposób, aby różnicę między wartością rzeczywistą a wartością zadaną sprowadzić do zera
(w praktyce często zadajnik wartości zadanej jest częścią regulatora).
Wielkości wejściowe obiektu są to wielkości fizyczne (informacje), za pomocą których
otoczenie oddziaływuje na obiekt, natomiast wielkości wyjściowe obiektu są to wielkości,
za pomocą których obiekt oddziaływuje na otoczenie lub są to informacje o przebiegu
procesów zachodzących w obiekcie (rys. 4).
Rys. 4. Obiekt sterowany
Gdy w układzie występuje dodawanie lub odejmowanie sygnałów trzeba na schemacie
blokowym umieszczać węzły sumujące. Zaznacza się na nich za pomocą znaków (+) i (–)
w jaki sposób otrzymuje się sygnał wyjściowy z tego węzła, będący algebraiczną sumą
sygnałów dochodzących do niego (rys. 5).
Rys. 5. Węzeł sumujący (
y
x
0
−
=
ε
)
Jeżeli dany sygnał działa na więcej bloków niż jeden, umieszcza się na schemacie
blokowym węzeł informacyjny. Charakteryzuje się on tym, że każdy sygnał wyjściowy
jest równy sygnałowi wejściowemu (rys. 6).
Rys. 6. Węzeł informacyjny
we
wy
Obiekt
Regulator
Obiekt
z
x
–
+
x
0
±
ε
y
y
y
y
y
x
0
±
ε
+
–
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
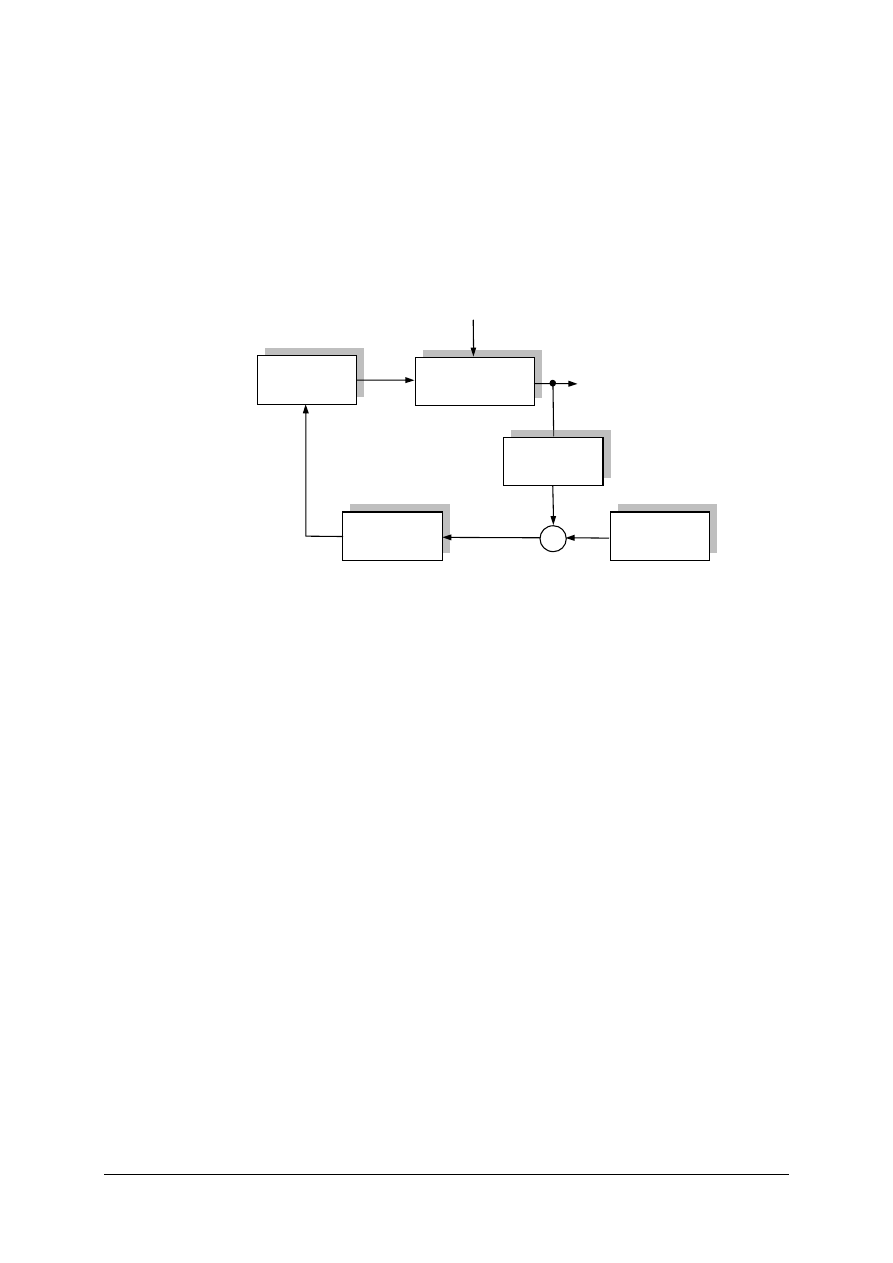
Porównując schemat z rysunku 3 oraz schemat z rysunku 7 można dodatkowo
wyodrębnić:
−
urządzenie pomiarowe, które mierzy wartość wielkości regulowanej. Sygnał z tego
urządzenia informuje układ regulacji o aktualnej wartości wielkości regulowanej.
Urządzenie pomiarowe składa się z czujnika pomiarowego mierzącego wielkość
podlegającą
regulacji
(np.
temperaturę) oraz
z
przetwornika
pomiarowego
przetwarzającego informację z czujnika na wielkość fizyczną dogodną do wykorzystania
w układzie regulacji,
−
urządzenie wykonawcze, za pośrednictwem którego regulator oddziaływuje na przebieg
procesu technologicznego (zawory, silniki, zasuwy, pompy, siłowniki, elektromagnesy).
Rys. 7.
Szczegółowy schemat blokowy układu regulacji [opracowanie własne]
Sygnałem nazywamy przebieg dowolnej wielkości fizycznej występującej w procesie
regulacji. Podstawowe sygnały występujące w układach regulacji to: sygnał sterujący
(nastawiający) x, sygnał zakłócający z, sygnał regulowany y, sygnał wartości zadanej x
o
oraz
sygnał uchybu (błędu) ε. Uchyb ε jest to różnica między zadaną, a rzeczywistą wartością
regulowaną. W zależności od postaci sygnałów występujących w układzie regulacji można
wyróżnić sygnały:
−
analogowe, które przyjmują dowolną wartość z zakresu ograniczonego górną i dolną
wartością graniczną. Każda wartość sygnału analogowego oznacza konkretną informację,
−
cyfrowe, które przedstawiają stany poszczególnych elementów oraz oddziaływują
na człony realizujące określone funkcje logiczne.
W zależności od sposobu przetwarzania i wykorzystania sygnałów rozróżnia się układy
sterowania:
−
sekwencyjnego, w którym poszczególne czynności sterujące odbywają się krok po kroku,
a przejście do następnego uzależnione jest od realizacji poprzedniego (lub upłynięcia
określonego czasu),
−
kombinacyjnego, gdzie sygnał sterujący jest logicznym powiązaniem kilku sygnałów.
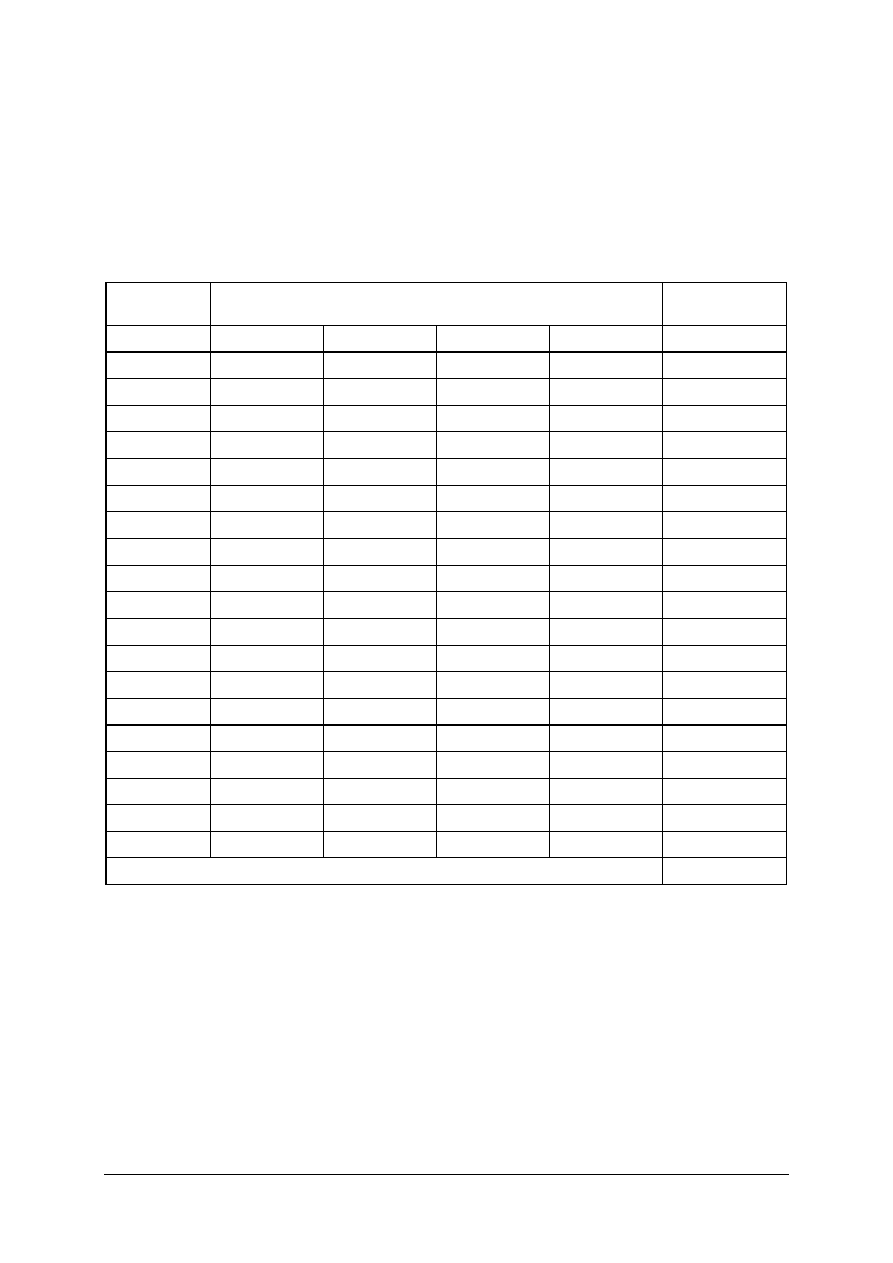
W celu zapewnienia możliwości łączenia bloków ze sobą i przekazywania informacji
między nimi wymagane jest ujednolicenie (standaryzacja) sygnałów tak, aby sygnały
wyjściowe i wejściowe wszystkich bloków były identyczne (tabela 1).
Urządzenie
wykonawcze
Obiekt
z
x
Regulator
–
+
±
ε
Urządzenie
pomiarowe
y
Zadajnik x
o
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
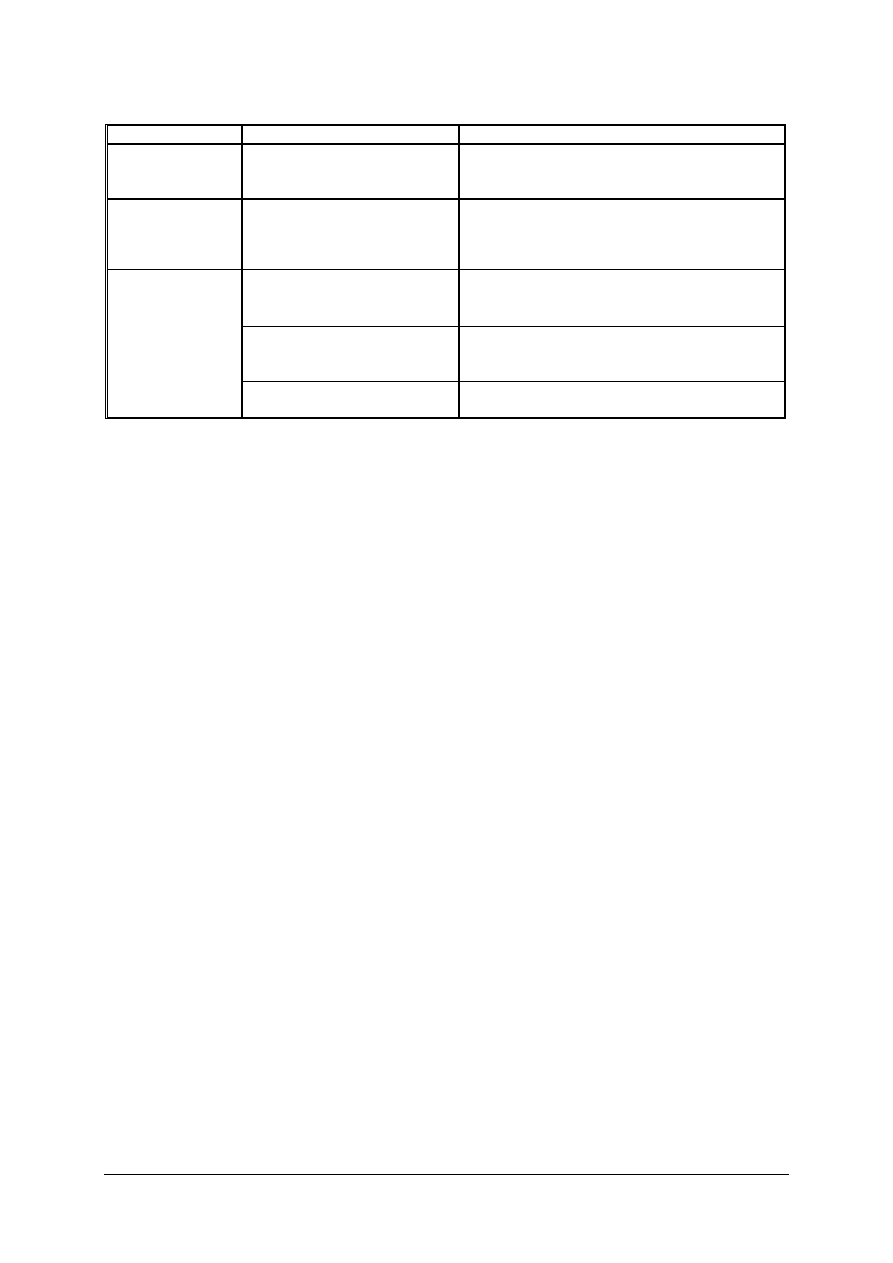
Tabela 1. Sygnały standardowe występujące w układach regulacji; opracowano na podstawie [6, s. 12]
Rodzaj sygnału
Wielkość fizyczna
Wartość lub zakres zmian wartości sygnału
pneumatyczny
ciśnienie powietrza
do 3,0kPa
20
÷
100kPa
600kPa
hydrauliczny
ciśnienie oleju
1,0MPa
6,0MPa
10,0MPa
16,0MPa
natężenie prądu stałego
0
÷
5mA
0
÷
20mA
4
÷
20mA
napięcie prądu stałego
0
÷
5V
0
÷
10V
0
÷±
10V
elektryczny
napięcie prądu przemiennego
230V
400V
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest sterowanie ręczne i sterowanie automatyczne?
2. Czym się różni układ otwarty od zamkniętego?
3. Co to jest sprzężenie zwrotne?
4. Jakie znasz sygnały w układach regulacji?
5. Jakie znasz rodzaje węzłów?
6. Jakie zadanie spełnia urządzenie pomiarowe?
7. Do czego wykorzystujemy urządzenie wykonawcze?
8. Czym charakteryzuje się sygnał analogowy?
9. W jaki sposób odbywa się sterowanie sekwencyjne?
10. Co to jest sygnał standardowy?
4.1.3. Ćwiczenia
Ćwiczenie 1
Określ przykłady sterowania ręcznego i sterowania automatycznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeprowadzić analizę proponowanych przykładów,
2) przyporządkować
przykładowe
typy
sterowania
do
poszczególnych
grup
(ręczne/automatyczne),
3) narysować schematy układów sterowania,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
–
arkusze papieru formatu A4,
–
linijka, ołówek.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
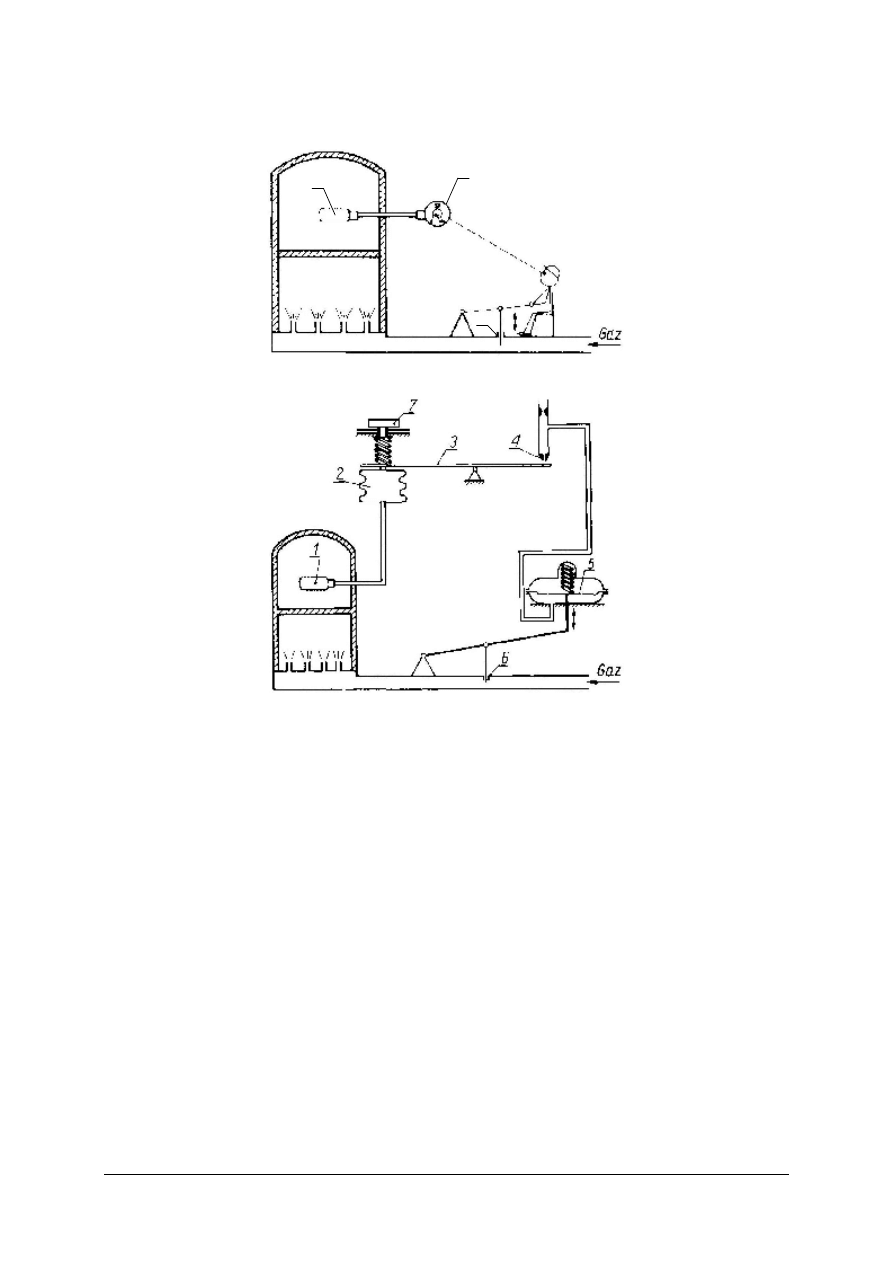
Ćwiczenie 2
Scharakteryzuj typy układów sterowania przedstawione na rysunkach.
Rys. nr 1 do ćwiczenia 2 [1, s. 10]
Rys. nr 2 do ćwiczenia 2 [1, s. 11]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować z zespole działanie układów sterowania przedstawionych na rysunkach,
2) sformułować i uzasadnić wnioski.
Wyposażenie stanowiska pracy:
–
arkusze papieru formatu A4.
1–termometr,
2–mieszek sprężysty,
3–dźwignia,
4–dysza,
5–siłownik
membranowy,
6–zawór,
7–śruba do
nastawiania
1–termometr,
2–wskaźnik
temperatury,
3–zawór
1
2
3
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
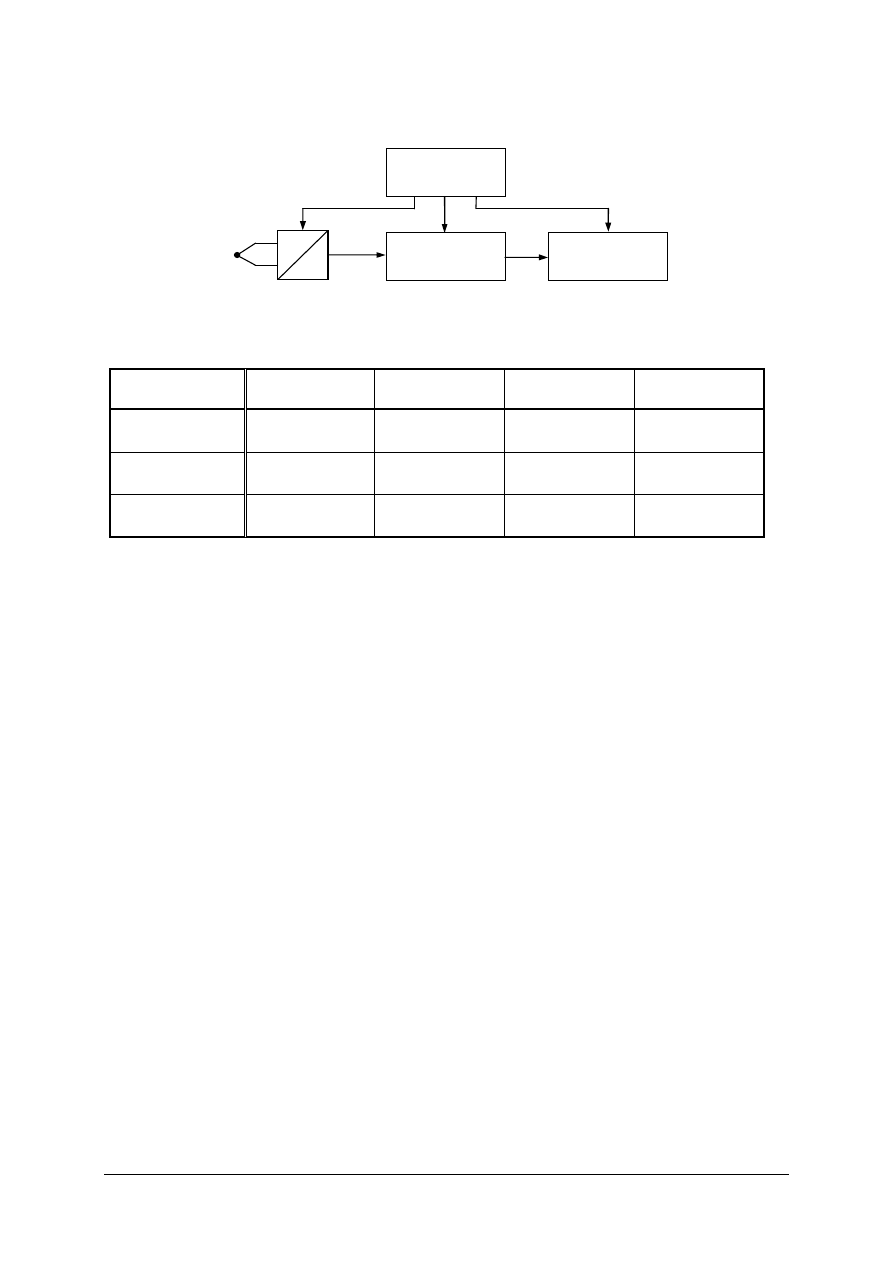
Ćwiczenie 3
Określ możliwości współpracy urządzeń w układzie regulacji.
Rys. do ćwiczenia 3 [opracowanie własne]
Tabela do ćwiczenia 3
Urządzenie
Napięcie
zasilania
Sygnał
wejściowy
Sygnał
wyjściowy
W zależności od ilości urządzeń tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować zasadę działania układu regulacji,
2) odszukać w katalogach odpowiednie urządzenia,
3) zestawić w tabeli parametry urządzeń,
4) potwierdzić możliwość współpracy,
5) opracować wnioski.
Wyposażenie stanowiska pracy:
–
katalogi urządzeń i elementów automatyki,
–
arkusze papieru formatu A4,
–
linijka, ołówek.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
rozróżnić sterowanie ręczne od sterowania automatycznego?
2)
określić różnice pomiędzy otwartym i zamkniętym układem
sterowania?
3)
dokonać analizy układu regulacji?
4)
skorzystać z katalogu urządzeń automatyki?
5)
dopasować elementy (urządzenia) układu sterowania?
T
Regulato
r
Zasilacz
I
Element
wykonawczy
Przetworni
k
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4.2. Charakterystyka statyczna układu regulacji
4.2.1. Materiał nauczania
W układzie statycznym wielkości wyjściowe zależą tylko od aktualnych wartości sygnału
wejściowego. Charakterystyką statyczną nazywamy zależność wielkości wyjściowej elementu
lub układu od wielkości wejściowej w stanie ustalonym. Poszczególnym wartościom sygnału
wejściowego x odpowiadają pewne wartości sygnału wyjściowego y. Sygnały elementu
znajdującego się w stanie ustalonym pozostają na stałym poziomie (x oraz y nie zmieniają
się w czasie). Układy takie nazywa się też bezinercyjnymi. Charakterystykę statyczną
elementu wyznacza się doświadczalnie lub analitycznie.
Model matematyczny układu statycznego wyrażamy za pomocą równań algebraicznych
wiążących wartości zmiennych w dowolnych chwilach – w wyniku rozwiązania równania
otrzymujemy określoną wartość, bądź przedstawia się je graficznie w postaci charakterystyki
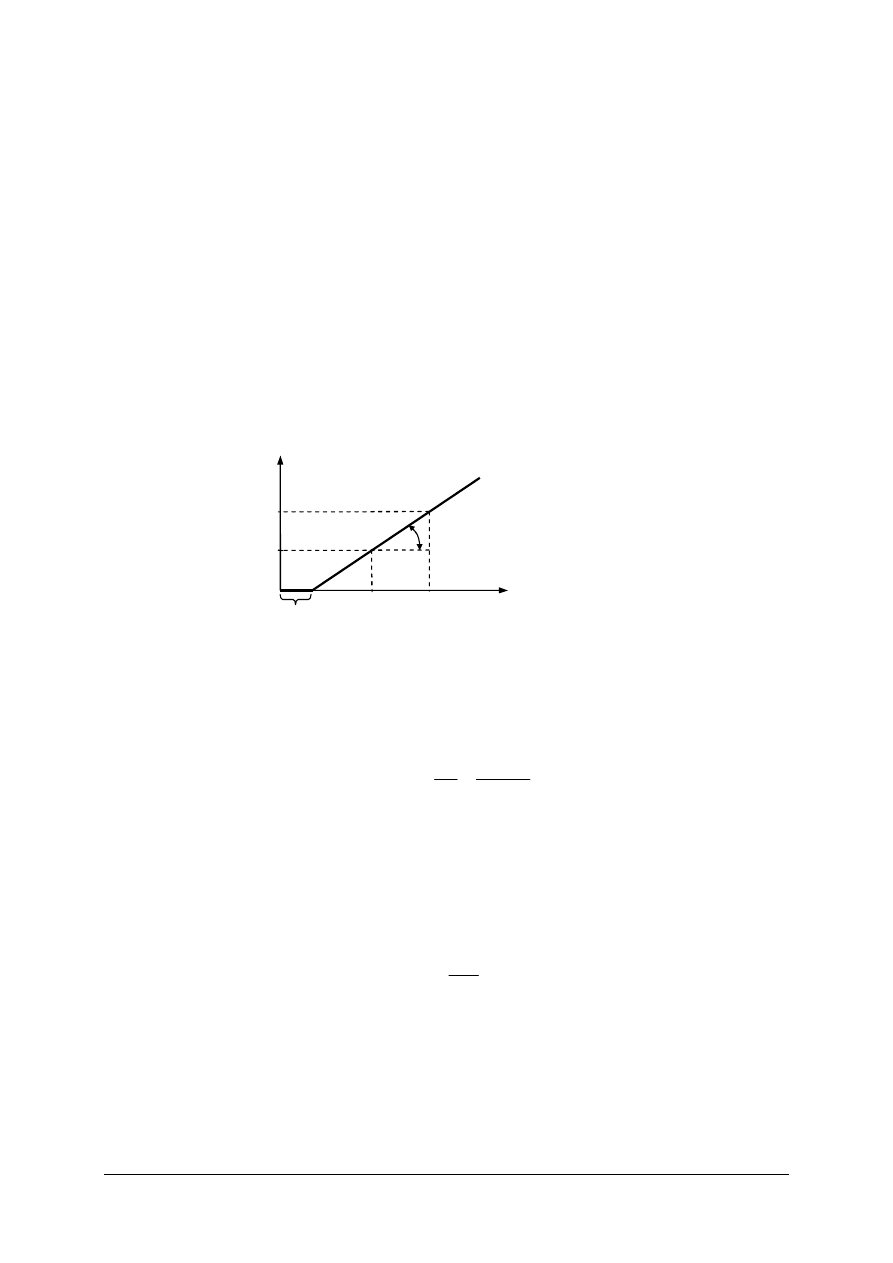
statycznej. Charakterystyka statyczna członu jest linią prostą, gdy istnieje proporcjonalność
między zmianami sygnału wyjściowego y i zmianami sygnału wejściowego x (rys. 8).
Rys. 8. Charakterystyka statyczna liniowa [opracowanie własne]
Współczynnikiem wzmocnienia k nazywa się stosunek przyrostu sygnału wyjściowego
y
∆
uzyskany przy zmianie przyrostu sygnału wejściowego
x
∆
, określonych w stanie
ustalonym. Należy pamiętać, że wzmocnienie nie jest wielkością bezwymiarową.
1
2
1
2
x
x
y
y
x
y
tg
k
−
−
=
∆
∆
=
α
=
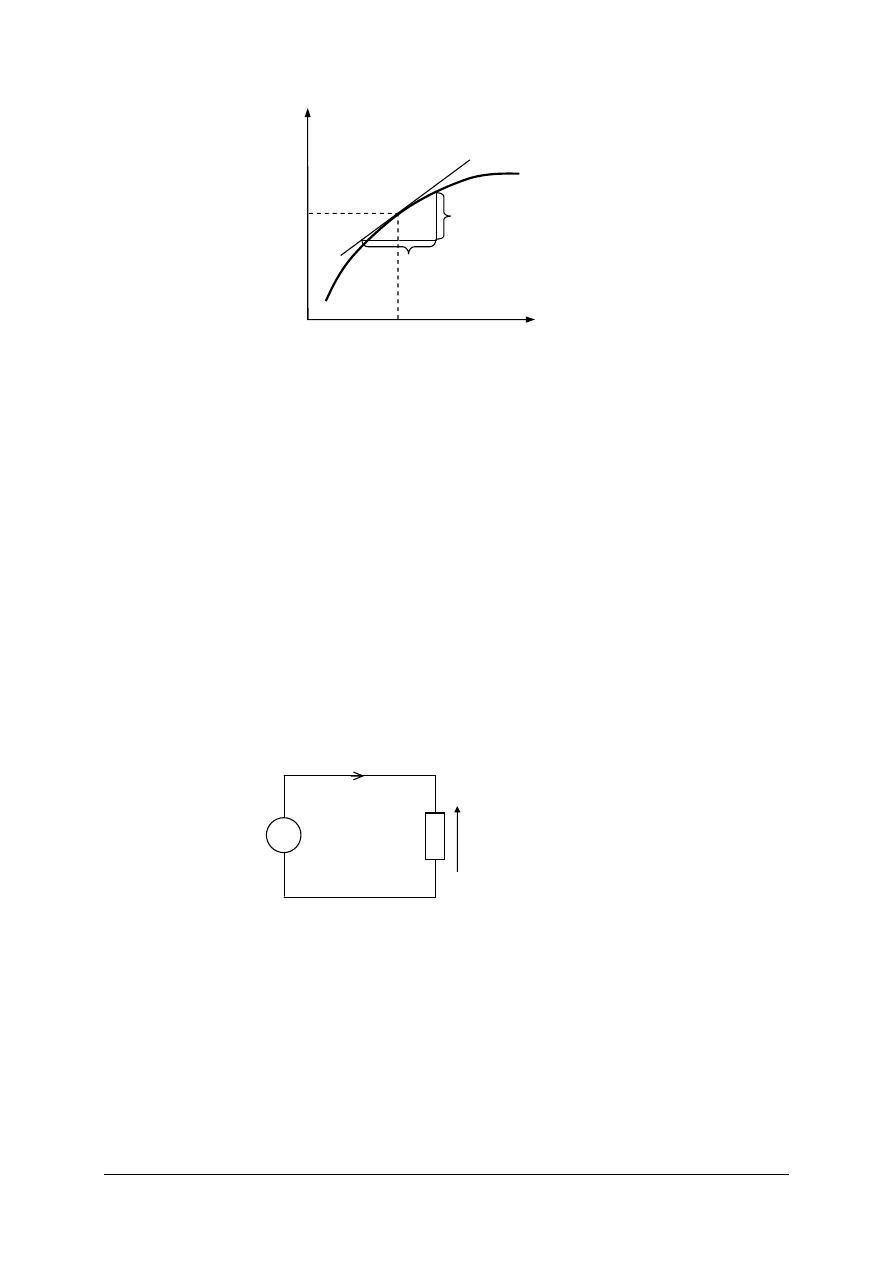
W rzeczywistości wiele członów układu regulacji ma charakterystyki statyczne
nieliniowe. Linearyzacją charakterystyki nazywamy zastąpienie charakterystyki nieliniowej
odcinkiem linii prostej. Proces ten przeprowadza się dla wybranego otoczenia punktu
charakterystyki, zwanego punktem pracy. W celu dokonania linearyzacji należy w tym
punkcie narysować styczną do krzywej, a następnie wyznaczyć wzmocnienie zastępcze
k
1
(rys. 9).
1
1
1
x
y
k
∆
∆
=
Linearyzując charakterystykę otrzymujemy wartość współczynnika wzmocnienia
jedynie w niewielkim otoczeniu punktu pracy. Jeżeli linearyzacja zostanie przeprowadzona
dla zbyt dużego otoczenia punktu pracy to należy spodziewać się wystąpienia błędów.
Jednym z typowych rodzajów nieliniowości charakterystyk statycznych jest strefa
nieczułości, w której zakres zmian sygnału sterującego nie wywołuje zmian sygnału
wyjściowego (rys. 8).
0
x
1
x
2
x
y
1
y
2
y
strefa
nieczułości
α
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
Rys. 9. Linearyzacja charakterystyki nieliniowej w otoczeniu punktu pracy [opracowanie
własne]
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zależności określa charakterystyka statyczna?
2. W jaki sposób wyznaczamy charakterystykę statyczną?
3. Czym charakteryzuje się element liniowy?
4. Co określa współczynnik wzmocnienia?
5. W jakim celu stosujemy linearyzację charakterystyki?
6. W jaki sposób przeprowadzamy linearyzację charakterystyki?
7. Czym charakteryzuje się strefa nieczułości?
4.2.3. Ćwiczenia
Ćwiczenie 1
Korzystając ze schematu ideowego wykreśl przebieg napięcia i przebieg prądu
na rezystorze.
Rys. do ćwiczenia 1 [opracowanie własne]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować działanie układu przedstawionego na schemacie,
2) zwiększając napięcie U narysować przebieg prądu I
R
w funkcji napięcia U
R
,
3) dokonać analizy otrzymanej charakterystyki,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
–
arkusze papieru formatu A4,
–
komputer z oprogramowaniem do symulacji działania układów elektronicznych.
U
R
I
R
U
R
0
x
1
x
y
1
y
∆
x
1
∆
y
1
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
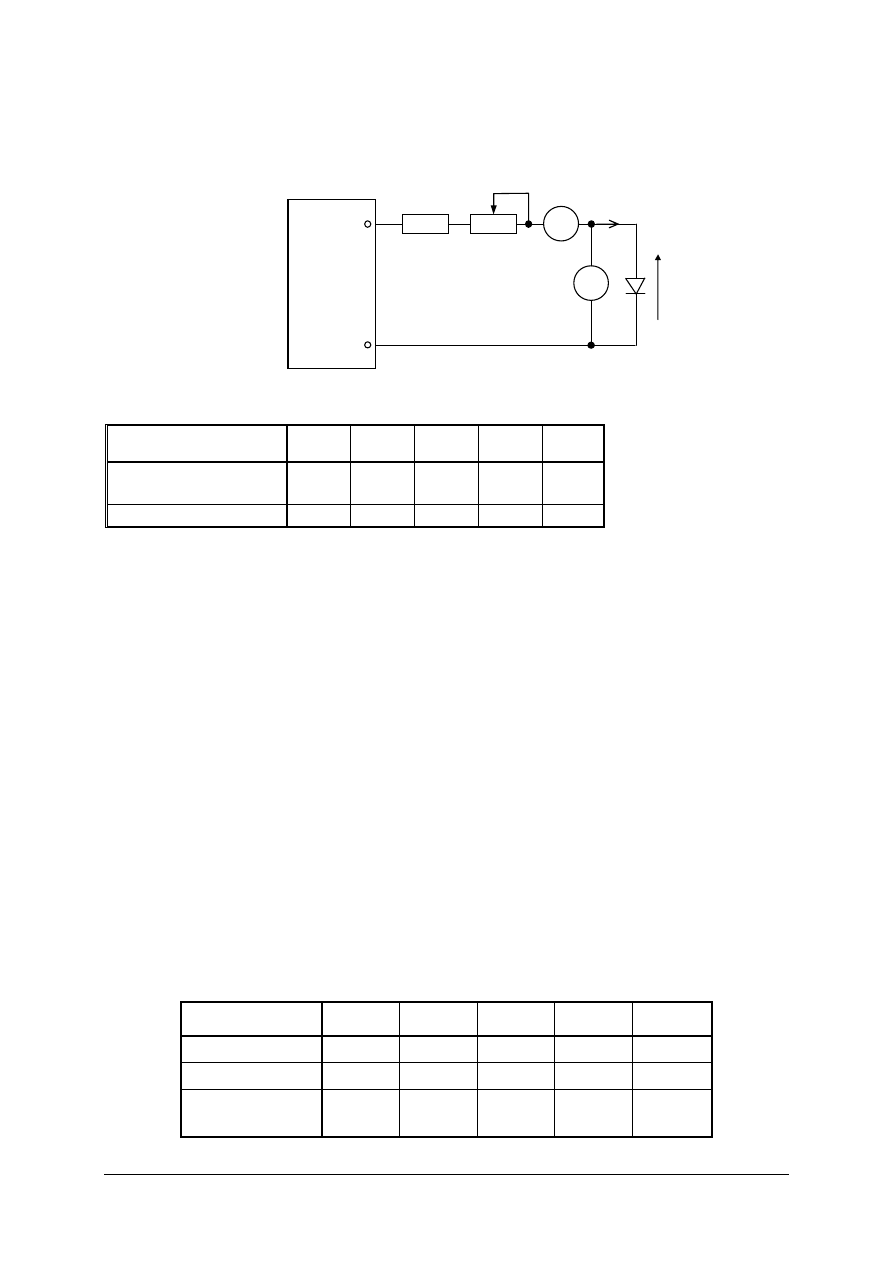
Ćwiczenie 2
Wyznacz charakterystykę statyczną diody prostowniczej w kierunku przewodzenia
( )
d
d
U
f
I
=
. Wyniki pomiarów zapisz w tabeli.
Rys. do ćwiczenia 2 [opracowanie własne]
Tabela do ćwiczenia 2
Nr pomiaru
1
2
3
4
5
Wartość napięcia U
d
[V]
Wartość prądu I
d
[mA]
W zależności od ilości pomiarów tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zmieniając potencjometrem wartość rezystancji zmierzyć wartość napięcia i prądu,
2) wykreślić charakterystykę diody w kierunku przewodzenia,
3) dokonać analizy otrzymanej charakterystyki,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
–
stanowisko do badania diody prostowniczej,
–
arkusze papieru formatu A4,
–
komputer z oprogramowaniem zawierającym arkusz kalkulacyjny w celu wykreślenia
charakterystyki diody.
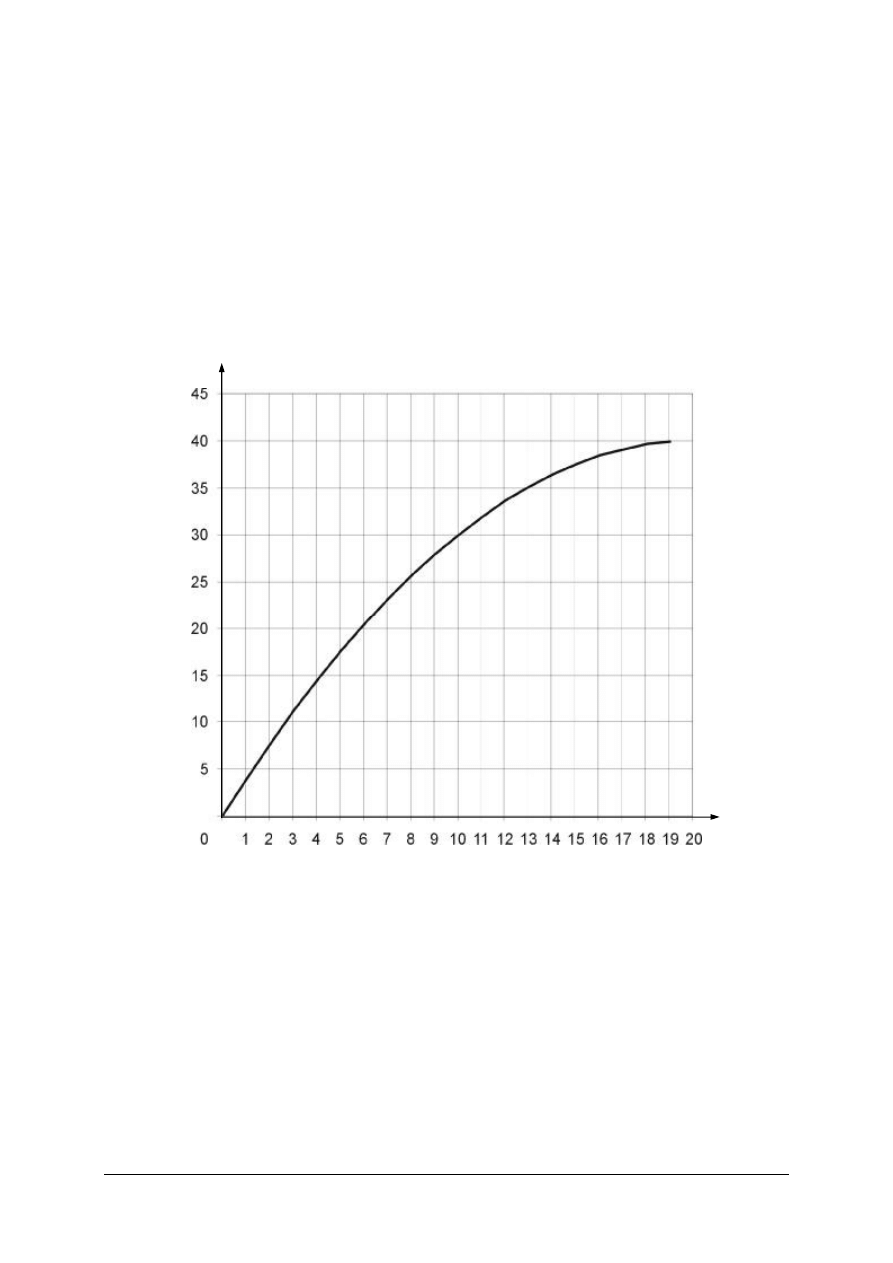
Ćwiczenie 3
Dokonaj linearyzacji przedstawionej na rysunku charakterystyki nieliniowej, a następnie
oblicz wzmocnienie zastępcze wokół wybranych punktów pracy. Wyniki obliczeń umieść
w tabeli.
Tabela do ćwiczenia 3
punkt pracy
A
B
C
D
E
i
x
∆
i
y
∆
wzmocnienie
zastępcze
i
k
U
d
I
d
D
V
mA
Zasilacz
5V
+
–
43
Ω
10k
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
gdzie
...
,
C
,
B
,
A
i
=
Odpowiednio do liczby punktów pracy tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wykreślić styczne dla założonych punktów pracy,
2) wyznaczyć
i
x
∆
oraz
i
y
∆
,
3) obliczyć wzmocnienie zastępcze
i
k ,
4) dokonać analizy otrzymanych wyników,
5) opracować wnioski.
Rys. do ćwiczenia 3 [opracowanie własne]
Wyposażenie stanowiska pracy:
−
arkusze papieru formatu A4,
−
ołówek, linijka,
–
kalkulator.
y
x

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wykreślić charakterystykę statyczną?
2)
dokonać linearyzacji charakterystyki nieliniowej?
3)
obliczyć wzmocnienie w wybranym punkcie pracy?
4)
dokonać analizy otrzymanych charakterystyk?
5)
dokonać analizy otrzymanych wyników?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.3. Charakterystyki dynamiczne członów układu regulacji
4.3.1. Materiał nauczania
W układzie dynamicznym wielkości wyjściowe zależą nie tylko od aktualnych wartości
wejściowych, ale również od zachowania się układu w okresie poprzedzającym daną chwilę.
Charakterystyka dynamiczna opisuje zależność sygnału wyjściowego od wejściowego
w funkcji czasu.
Charakterystyki dynamiczne przedstawiają również zachowanie się członów w stanach
nieustalonych, przy zmieniających się wartościach sygnałów wejściowych i wyjściowych.
Model matematyczny układu dynamicznego przedstawia się za pomocą równań
różniczkowych. Rozwiązania równań różniczkowych nie można przedstawić jako jednej
liczby. Są to zawsze funkcje czasu, które przyjmują nieskończenie wiele wartości. Zależności
matematyczne określające właściwości dynamiczne członów nazywamy transmitancjami
i oznaczamy literą „G” (są one odpowiednikiem impedancji w elektronice). Wyznaczenie
równań wymaga znajomości matematyki wyższej, dlatego w niniejszym poradniku
ograniczono się do zdefiniowania i przedstawienia graficznego właściwości członów
dynamicznych. Do wyrażenia właściwości dynamicznych oprócz równań różniczkowych
używamy wymuszeń (sygnałów wejściowych) standardowych przedstawionych w tabeli 2.
Człon jest to najmniejsza komórka, którą można opisać właściwą dla niej funkcją
przejścia (od jednego do drugiego stanu ustalonego). Z członów budujemy elementy.
Podstawowymi członami dynamicznymi są (odpowiedzi uzyskano podając na wejście skok
jednostkowy przy zerowych warunkach początkowych, tabela 2):
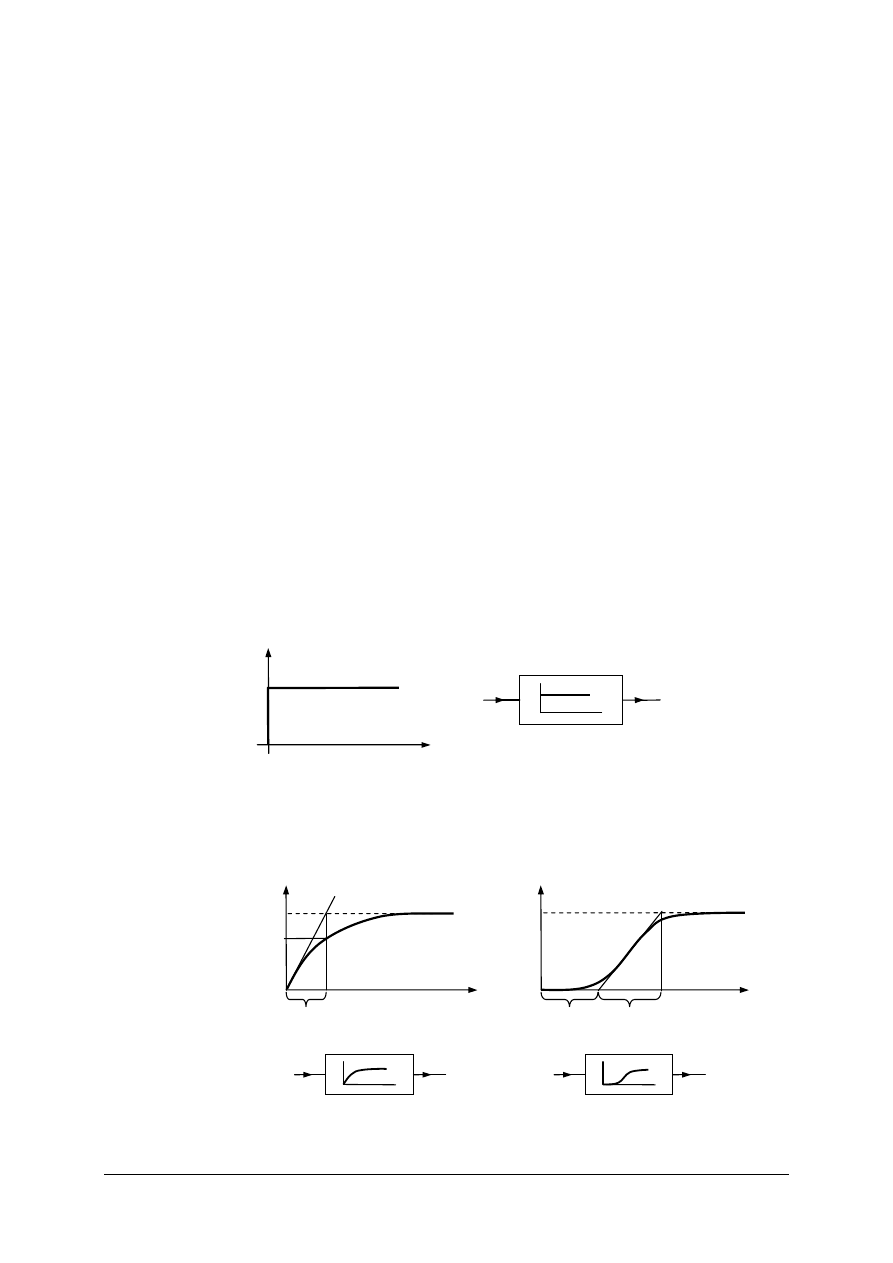
1. Człon proporcjonalny (rys. 10). Wielkość wyjściowa przyjmuje wartość proporcjonalną
do wielkości wejściowej. Człon charakteryzuje się bezinercyjnością (stała czasowa
0
T
=
) oraz brakiem opóźnienia (
0
T
o
=
).
Rys. 10. Człon proporcjonalny: a) odpowiedź skokowa, b) oznaczenie symboliczne [opracowanie własne]
2. Człon inercyjny (rys. 11).
Rys. 11. Człon inercyjny: odpowiedź skokowa: a) I rzędu, b) II i wyższego rzędu; c)
oznaczeniesymboliczne I rzędu, d) oznaczenie symboliczne II i wyższego rzędu
[opracowanie własne]
t
y
b)
T
o
t
y
0,632
a)
T
1
T
d)
c)
x
y
x
y
0
0
1
y
t
0
a)
b)
x
y
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Wielkość wyjściowa narasta stopniowo od momentu zmiany wielkości wejściowej.
Ustalenie nowej wartości y następuje po czasie T dla inercji I rzędu oraz po czasie
o
T
T
+
dla
inercyjności II i wyższego rzędu (układ statyczny ma rząd inercji równy 0). Szybkość zmian
zmiennej wyjściowej charakteryzowana jest przez stałą czasową T. Im większa jest wartość
stałej czasowej, tym wolniej nadąża wielkość wyjściowa za wejściową. Stała czasowa
omawianego członu jest to czas, po którym sygnał wyjściowy w odpowiedzi na wymuszenie
skokowe sygnału wejściowego osiągnie wartość 63,2% stanu ustalonego. Stałą czasową
T wyznaczamy graficznie przez wykreślenie stycznej do krzywej odpowiedzi czasowej. T
o
to
czas, w którym wielkość regulowana nie ulega zmianie.
Tabela 2. Wymuszenia standardowe [6, s.28]
Nazwa wymuszenia
Wykres wymuszenia
Postać
analityczna
wymuszenia
Skok
jednostkowy
(funkcja
Heaviside’a)
( )
≥
<
=
0
t
,
1
0
t
,
0
t
x
Wymuszenie
skokowe o dowolnej
wartości
( )
≥
<
=
0
t
,
x
0
t
,
0
t
x
st
Wymuszenie
impulsowe (funkcja
Diraca)
( )
>
=
∞
<
=
0
t
,
0
0
t
,
0
t
,
0
t
x
Wymuszenie liniowe
narastające
( )
≤
>
=
0
t
,
0
0
t
,
at
t
x
Wymuszenie
paraboliczne
( )
≤
>
=
0
t
,
0
0
t
,
at
t
x
2
x
t
0
x
t
0
x
t
0
x
t
1
0
x
t
x
st
0
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
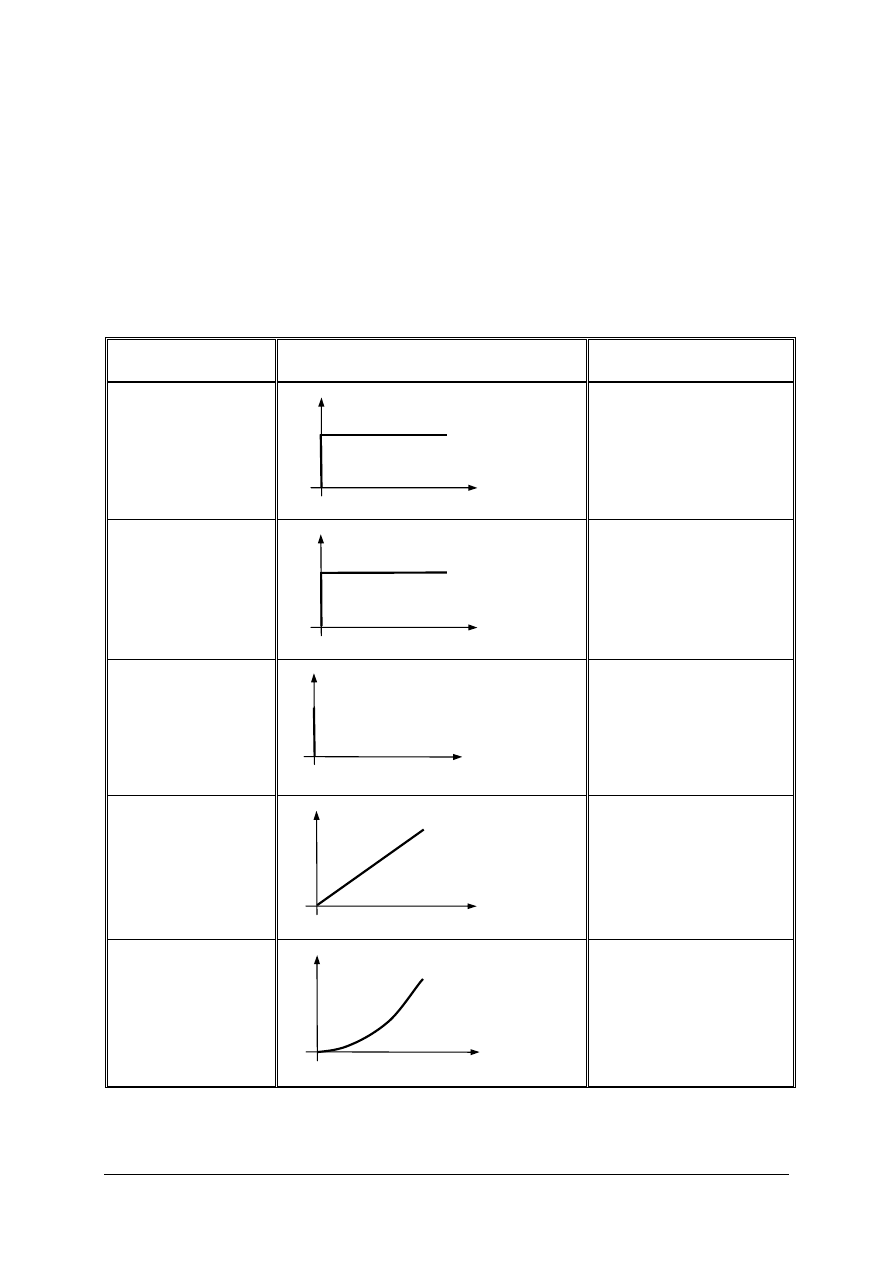
3. Człon całkujący (rys. 12). Wartość wielkości wyjściowej będzie narastać tak długo,
jak długo trwa sygnał wejściowy, a prędkość narastania wielkości y będzie tym większa
im większa będzie wartość x.
Rys. 12. Człon całkujący: a) odpowiedź skokowa, b), c) oznaczenie symboliczne [opracowanie własne]
T
i
−
stała czasowa całkowania (czas zdwojenia, czas izodromu). Jest to czas, po którym
sygnał
wyjściowy
połączonych
członów
proporcjonalnego
i
całkującego
lub proporcjonalnego i całkującego oraz różniczkującego osiąga podwójną wartość działania
proporcjonalnego.
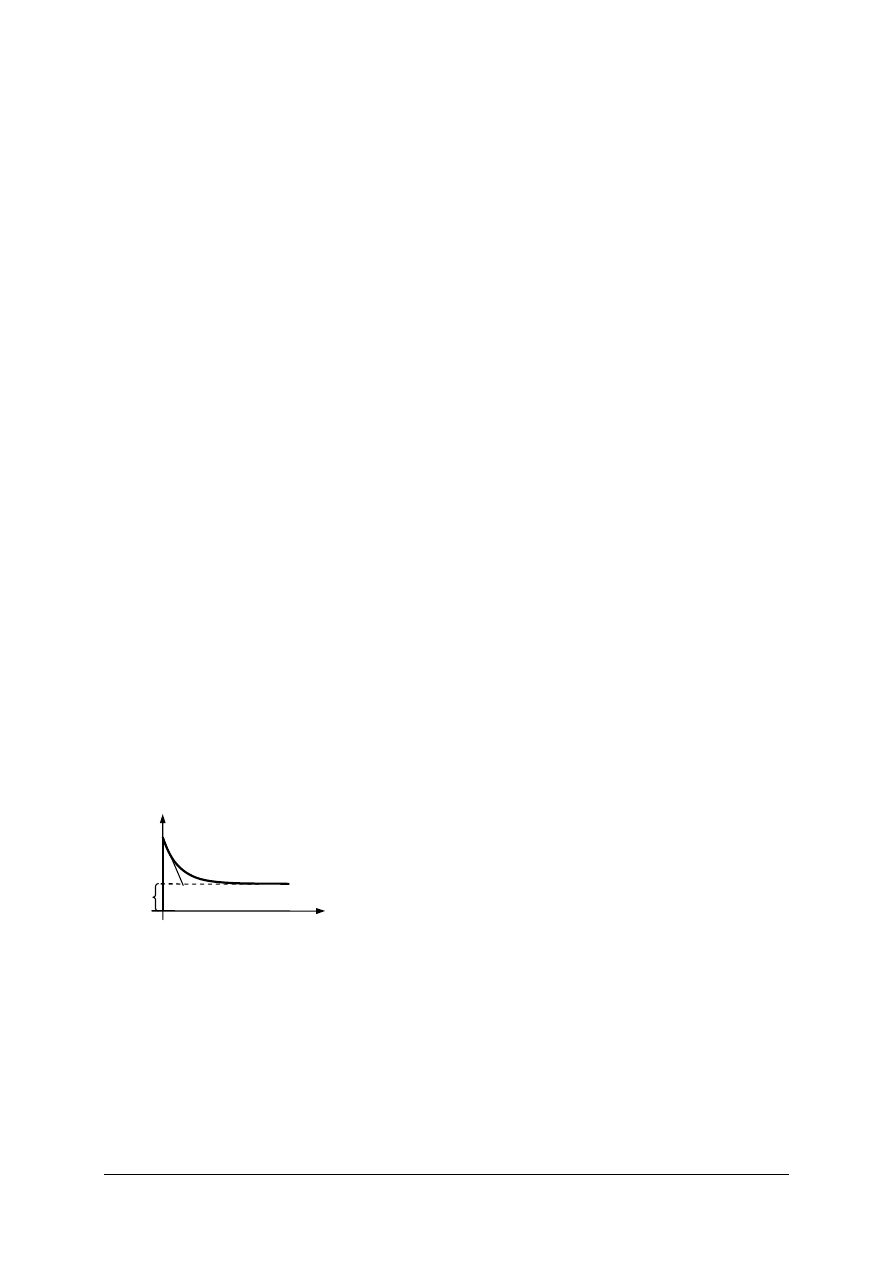
4. Człon różniczkujący (rys. 13). Wielkość wyjściowa uzależniona jest od prędkości zmian
wielkości wejściowej.
Rys. 13. Człon różniczkujący: a) odpowiedź skokowa, b), c) oznaczenie symboliczne [opracowanie własne]
T
d
−
stała czasowa różniczkowania (czas wyprzedzenia). Jest to czas, po którym liniowo
narastający sygnał wejściowy staje się równy sygnałowi wyjściowemu członu
różniczkującego.
−
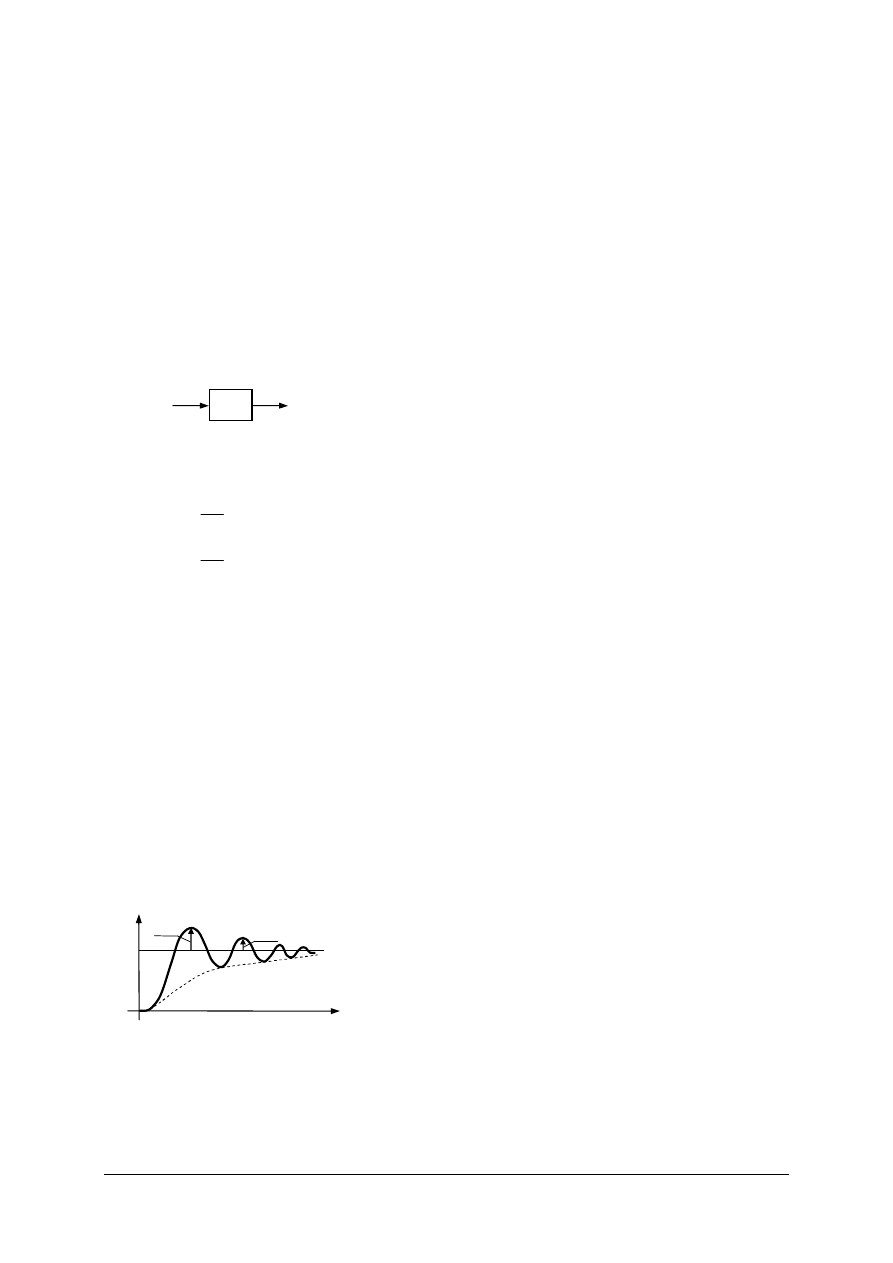
Człon oscylacyjny (rys. 14). Tłumienie odpowiedzi członu oscylacyjnego określa
współczynnik tłumienia
ξ
, który wyznaczamy z zależności:
1
A
2
A
=
ξ
Rys. 14. Człon oscylacyjny: a) odpowiedź skokowa, b) oznaczenie symboliczne [opracowanie własne]
y
t
0
a)
b)
A1
A2
x
y
y
t
0
T
d
a)
b)
x
y
dt
d
T
d
c)
x
y
y
t
0
T
i
a)
b)
x
y
∫
dt
T
1
i
1
c)
x
y
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Wartości stałych czasowych mają podstawowe znaczenie przy projektowaniu układów
sterowania automatycznego.
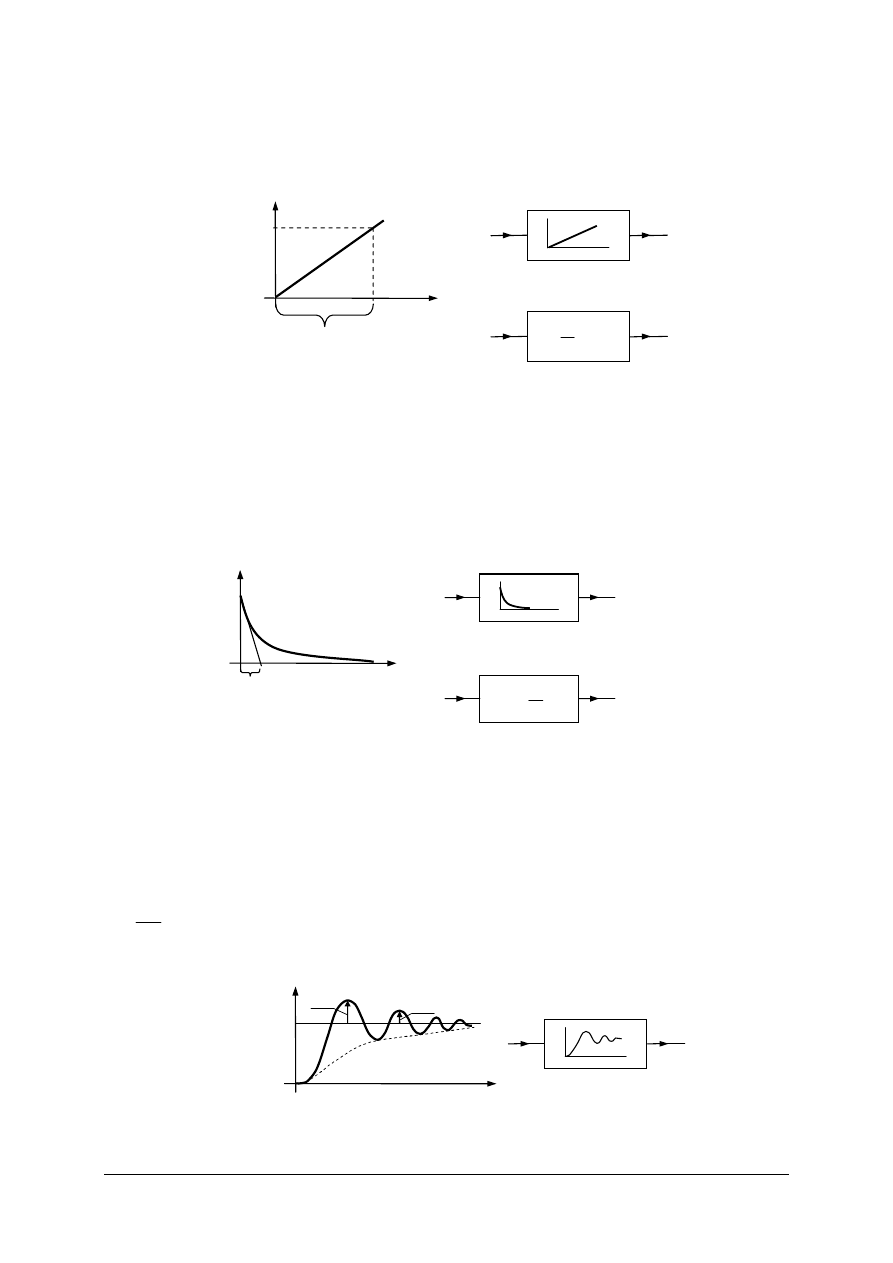
Właściwości dynamiczne członów można wyznaczać nie tylko przy pomocy odpowiedzi
na wymuszenia standardowe, lecz również za pomocą charakterystyk częstotliwościowych
określających zależności odpowiedzi członu na podanie na wejście funkcji harmonicznej –
sinusoidy (rys. 15). Na rysunku 15b można zaobserwować, że wyjście członu charakteryzuje
się identyczną pulsacją (częstotliwością kątową)
ω
, różną amplitudą
( )
ω
2
A
i jest przesunięte
w fazie o kąt
( )
ω
ϕ
. Amplituda sygnału wyjściowego, a także kąt przesunięcia fazowego
zależą od częstotliwości drgań f, ponieważ
f
2
π
=
ω
.
Rys. 15.
Przebieg sygnałów: a) wejściowego i b) wyjściowego przy wyznaczaniu
charakterystyk częstotliwościowych elementów automatyki; opracowano na
podstawie [6, s. 30]
Parametrami charakteryzującymi właściwości elementu są:
−
współczynnik wzmocnienia amplitudy (stosunek amplitudy odpowiedzi do amplitudy
wymuszenia)
( )
( )
( )
ω
ω
=
ω
1
2
A
A
A
−
przesunięcie fazowe pomiędzy sygnałem wyjściowym i wejściowym
( )
( )
( )
ω
ω
∆
π
=
ω
ϕ
T
T
2
gdzie:
T
−
okres, to jest najmniejszy przedział czasu, po którym powtarza się wartość funkcji,
T
∆
−
przesunięcie.
Na podstawie powyższych parametrów rysowane są charakterystyki, które również
określają własności dynamiczne członów. Wykres stosunku amplitud
( )
ω
A
w funkcji
częstotliwości
ω
nosi nazwę amplitudowej charakterystyki częstotliwościowej, natomiast
wykres przesunięcia fazowego
( )
ω
ϕ
nazywa się fazową charakterystyką częstotliwościową.
x
0
T
A
1
(
ω
)
t
y
0
T
A
2
(
ω
)
t
∆
T
a)
b)
ω
π
=
=
2
f
1
T
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zależności przedstawia charakterystyka dynamiczna?
2. W jakim celu używamy wymuszeń standardowych?
3. Jakie parametry charakteryzują człon proporcjonalny?
4. Jakie parametry charakteryzują człon inercyjny?
5. Jakie parametry charakteryzują człon całkujący?
6. Jakie zależności przedstawiają charakterystyki częstotliwościowe?
4.3.3. Ćwiczenia
Ćwiczenie 1
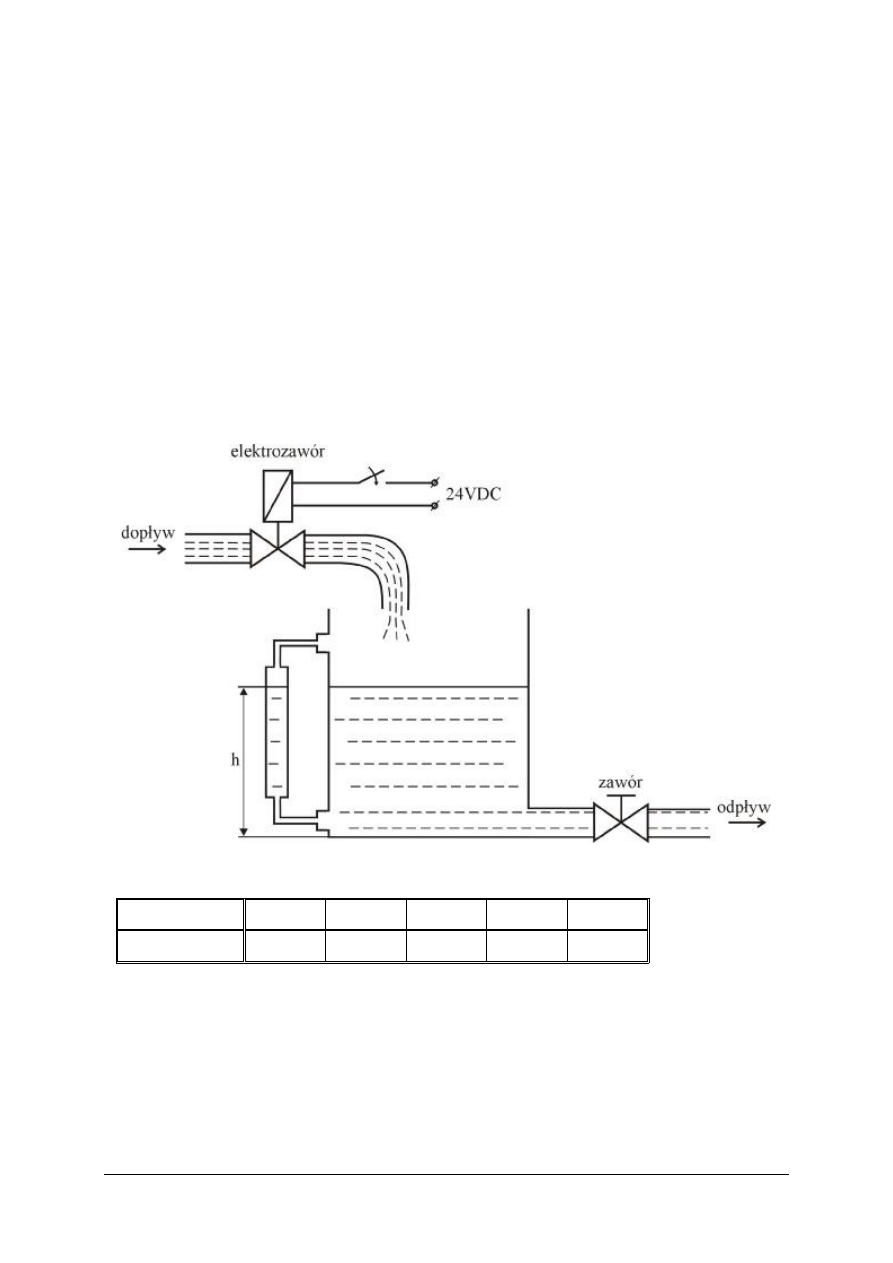
Wyznacz charakterystykę dynamiczną zbiornika z odpływem regulowanym. Wyniki
pomiarów umieść w tabeli.
Rys. do ćwiczenia 1 [opracowanie własne]
Tabela do ćwiczenia 1
Czas t [s]
Poziom h [mm]
W zależności od liczby pomiarów tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć układ zasilania elektrozaworu,
2) podłączyć układ zasilania wody,
3) wykreślić charakterystyki zbiornika
( )
t
f
h
=
dla trzech różnych wartości otwarcia zaworu
odpływowego,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
4) wyznaczyć stałe czasowe T,
5) dokonać analizy wyznaczonych charakterystyk,
6) opracować wnioski.
Wyposażenie stanowiska pracy:
−
zbiornik otwarty z regulowanym odpływem,
−
arkusze papieru formatu A4,
−
komputer z oprogramowaniem zawierającym arkusz kalkulacyjny w celu wykreślenia
charakterystyki zbiornika.
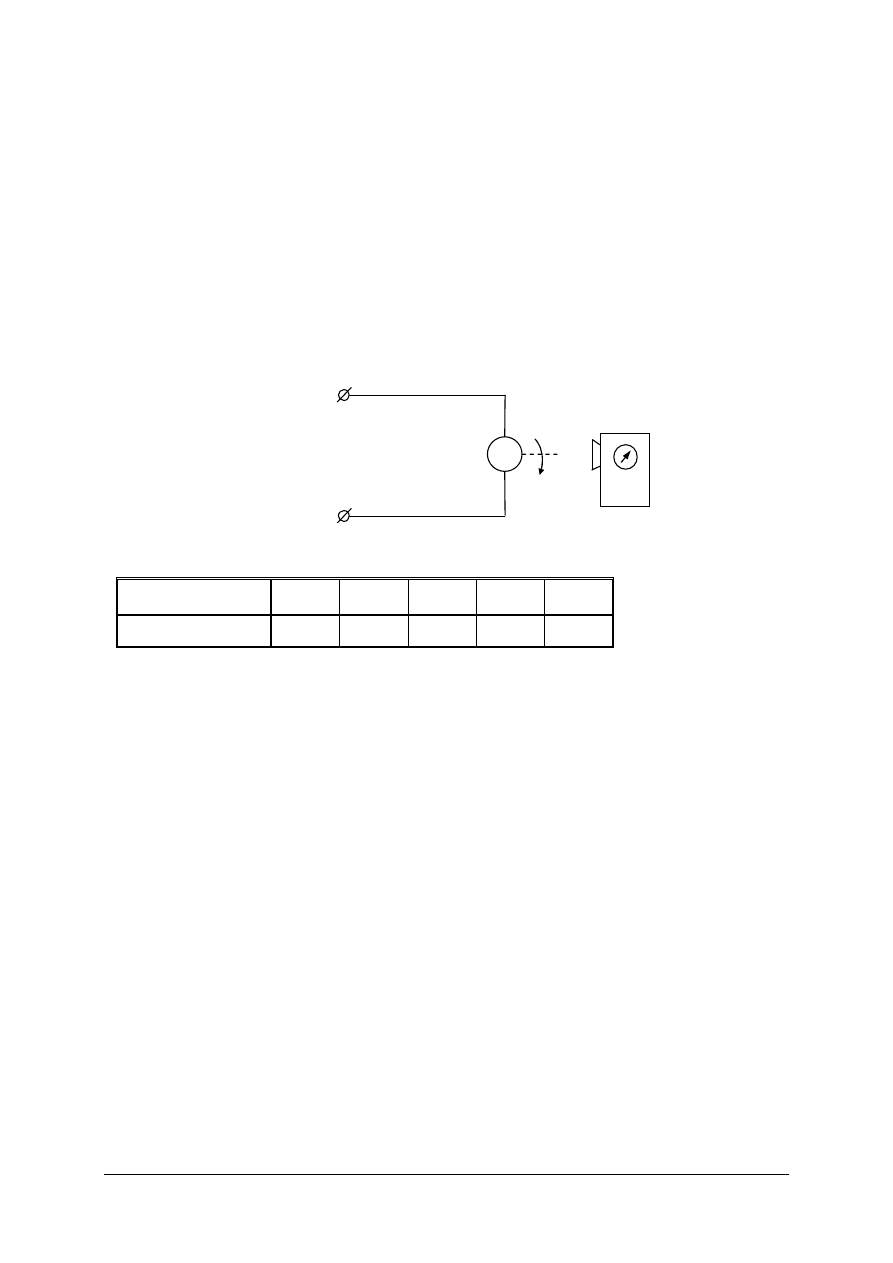
Ćwiczenie 2
Wyznacz przebieg czasowy prędkości kątowej
ω
wirnika silnika prądu stałego w trakcie
rozruchu. Wyniki pomiarów umieść w tabeli.
Rys. do ćwiczenia 2 [opracowanie własne]
Tabela do ćwiczenia 2
Czas t [s]
1 (4V) 2 (5V)
3 (6V)
Prędkość
ω
[rad/s]
Odpowiednio do liczby pomiarów tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć układ zasilania silnika,
2) zmieniając napięcie w przedziale 4
÷
12VDC dokonać pomiaru prędkości kątowej silnika
stroboskopem,
3) wykreślić charakterystykę prędkości kątowej silnika
( )
t
f
=
ω
,
4) wyznaczyć stałą czasową T,
5) dokonać analizy otrzymanej charakterystyki,
6) opracować wnioski.
Wyposażenie stanowiska pracy:
−
stanowisko do badania silnika prądu stałego,
−
arkusze papieru formatu A4,
−
komputer z oprogramowaniem zawierającym arkusz kalkulacyjny w celu wykreślenia
charakterystyki prędkości kątowej.
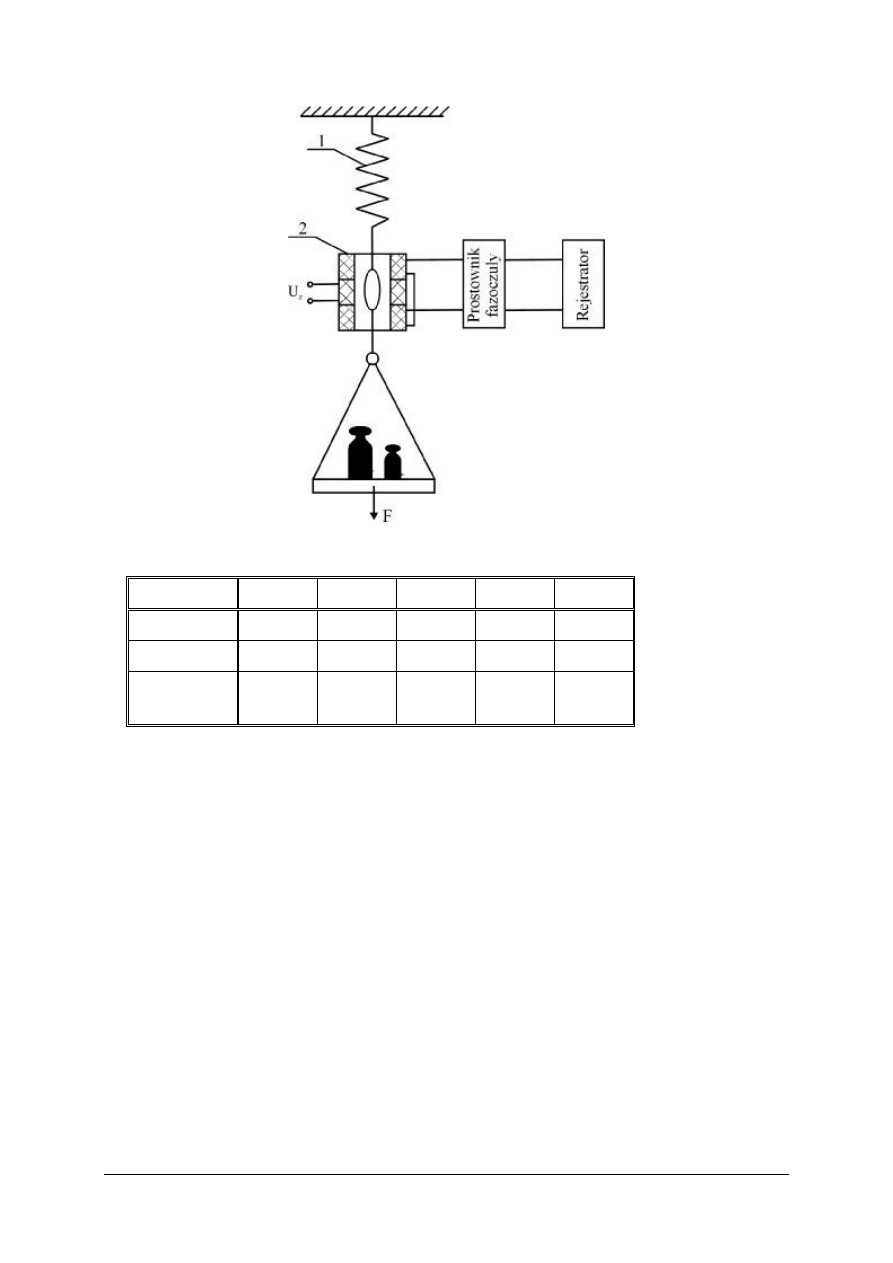
Ćwiczenie 3
Wyznacz współczynnik tłumienia
ξ
elementu sprężystego. Sygnałem wejściowym
jest obciążenie, a sygnałem wyjściowym oscylacje sprężyny. Wyniki pomiarów umieść
w tabeli.
ω
M
+
–
4
÷
12VDC
stroboskop
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Rys. do ćwiczenia 3: 1) sprężyna, 2) czujnik indukcyjny różnicowy [opracowanie własne]
Tabela do ćwiczenia 3
ciężar [kg]
A1 [mm]
A2 [mm]
współczynnik
tłumienia
ξ
W zależności od ilości ciężarków tabelę poszerzamy o dalsze rubryki.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zwiększać ciężar na szalce,
2) obserwować zmiany na rejestratorze,
3) wyznaczyć współczynnik tłumienia
ξ
,
4) dokonać analizy otrzymanych wyników,
5) opracować wnioski.
Wyposażenie stanowiska pracy:
—
stanowisko pomiarowe do wyznaczania współczynnika tłumienia,
—
arkusze papieru formatu A4,
—
kalkulator.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
przeanalizować działanie układu dynamicznego?
2)
wykreślić charakterystykę dynamiczną układu?
3)
wyznaczyć stałą czasową T członu inercyjnego?
4)
obliczyć współczynnik tłumienia
ξ
członu oscylacyjnego?
5)
dokonać analizy otrzymanych charakterystyk dynamicznych?
6)
dokonać analizy otrzymanych wyników?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
4.4. Przebiegi przejściowe układów regulacji
4.4.1. Materiał nauczania
Ze względu na przebieg zmian wielkości zadanej układy automatycznej regulacji dzieli
się na:
−
układy regulacji stałowartościowej, których funkcją jest utrzymanie na stałym poziomie
wartości wielkości regulowanej niezależnie od działających zakłóceń. Wartość zadana
regulacji stałowartościowej nie zmienia się w czasie,
−
układy regulacji nadążnej, które powinny zapewnić zmianę wartości wielkości
regulowanej w zależności od bieżącej wartości wielkości zadanej, zwanej wielkością
wiodącą. Zmian wartości zadanej w czasie nie da się przewidzieć,
−
układy regulacji programowej, w którym wartość zadana zmienia się w czasie, według
przygotowanego wcześniej programu,
−
układy regulacji ekstremalnej, których algorytm działania polega na utrzymaniu
maksymalnej lub minimalnej wartości wielkości regulowanej w zależności od aktualnie
występujących zakłóceń,
−
układy regulacji adaptacyjnej zawierają urządzenia, które w przypadku zmian
właściwości obiektu lub oddziaływań zewnętrznych dostosowują sterowanie gwarantując
prawidłową realizację działania układu.
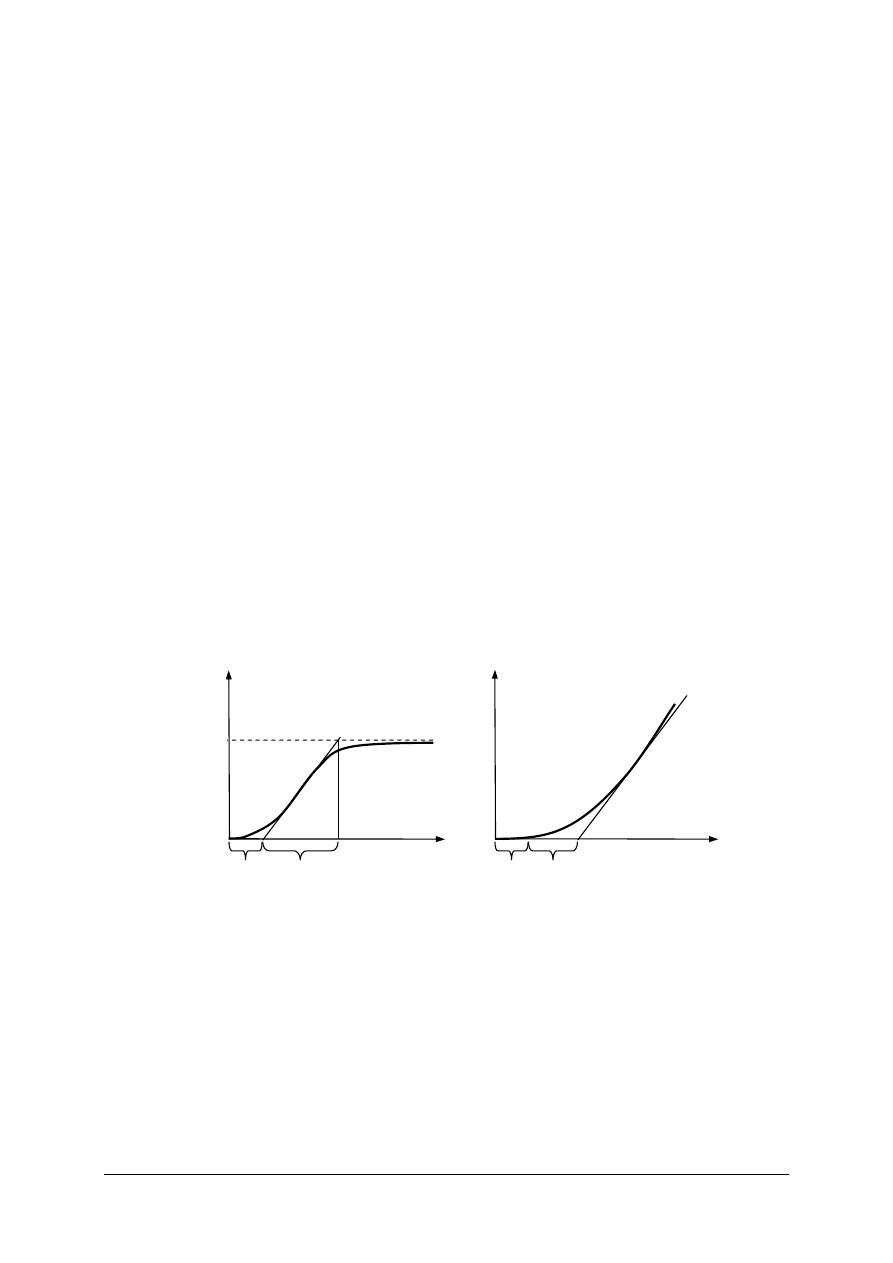
Ze względu na przebieg odpowiedzi na wymuszenie skokowe obiekty dzieli się na:
−
statyczne (z samowyrównaniem), w których wielkość sterowana y osiąga stan ustalony
w układzie otwartym sterowania bez użycia regulatora (rys. 16a),
−
astatyczne (bez samowyrównania), w których wielkość regulowana nie może osiągnąć
stanu ustalonego bez pomocy regulatora (rys. 16b).
Rys. 16.
Odpowiedź skokowa: a) obiektu statycznego, b) obiektu astatycznego;
opracowano na podstawie [4, s. 91, 6, s. 40]
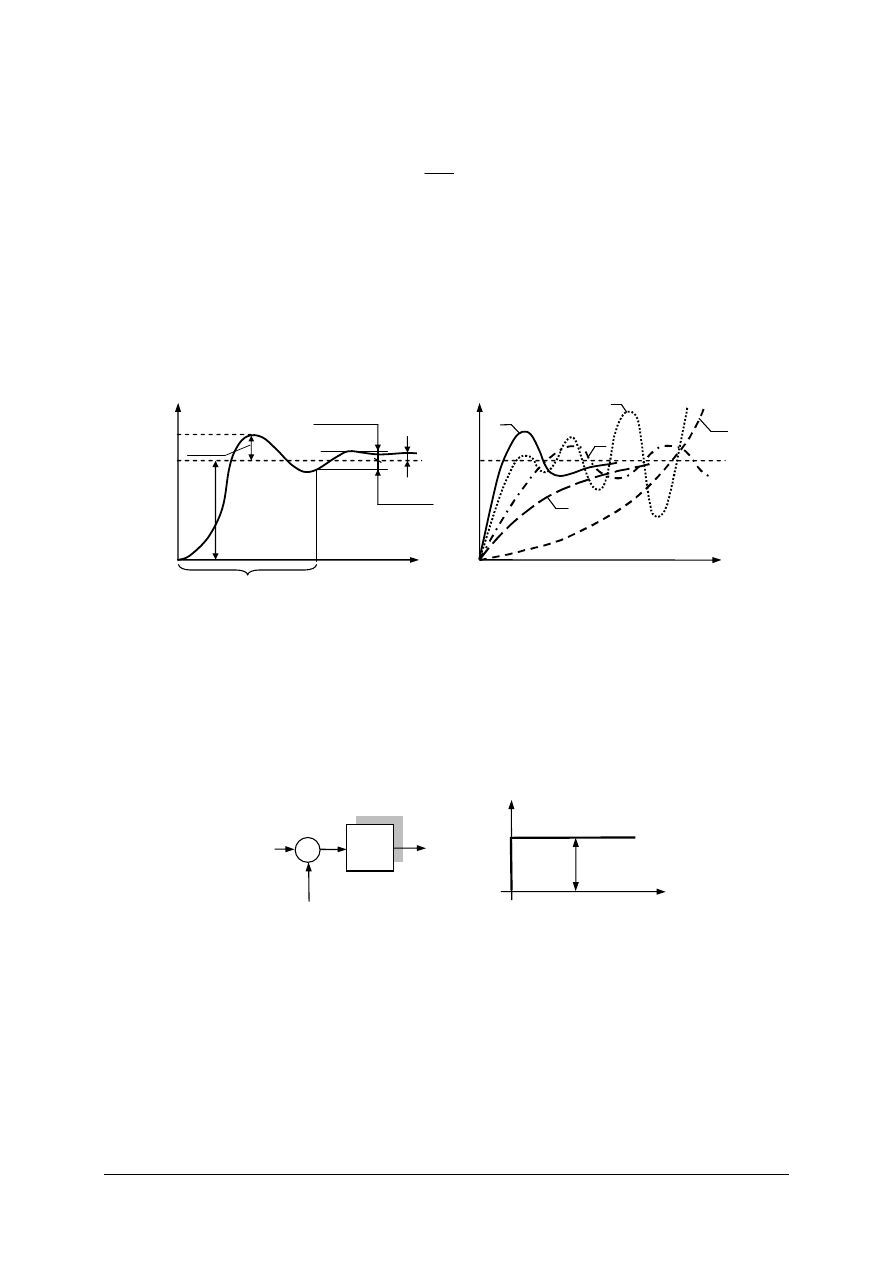
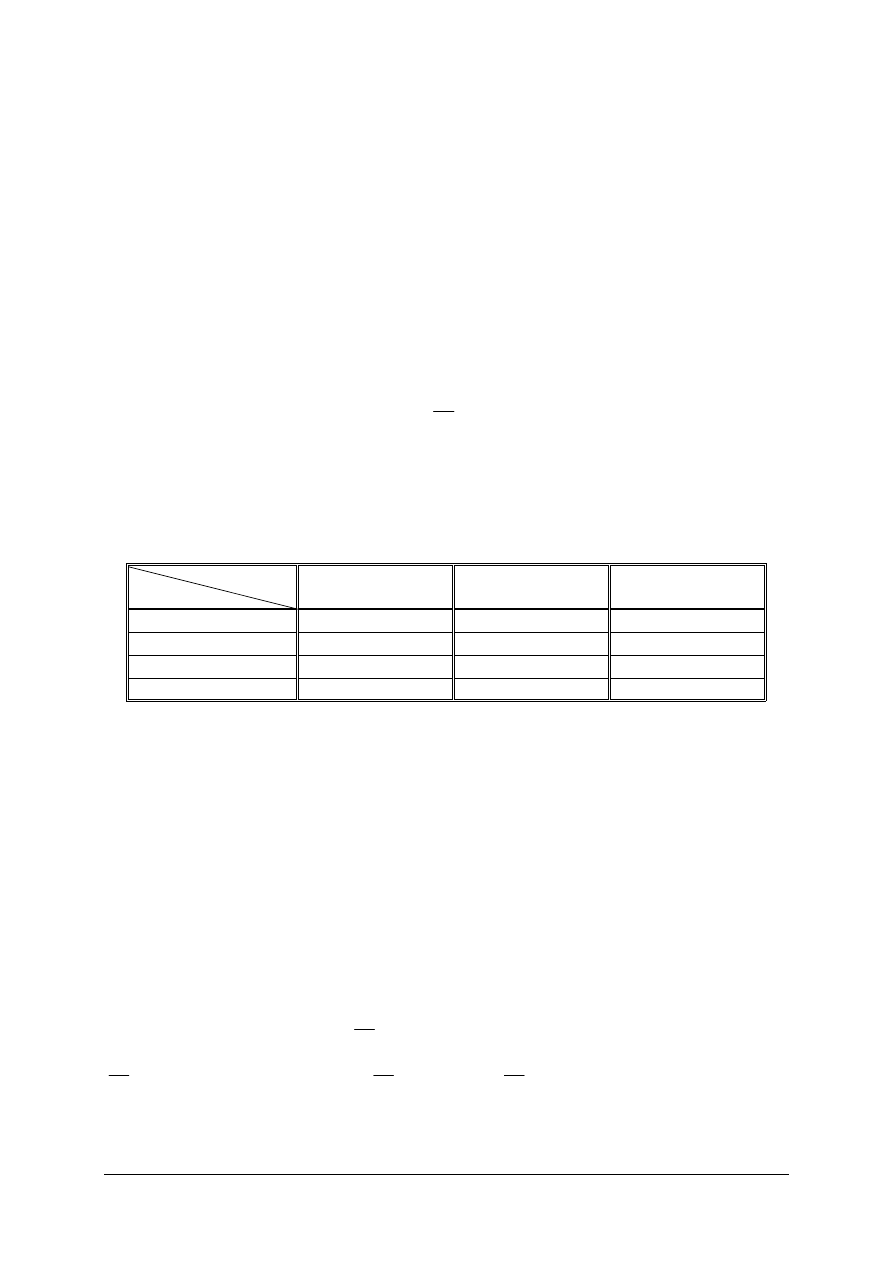
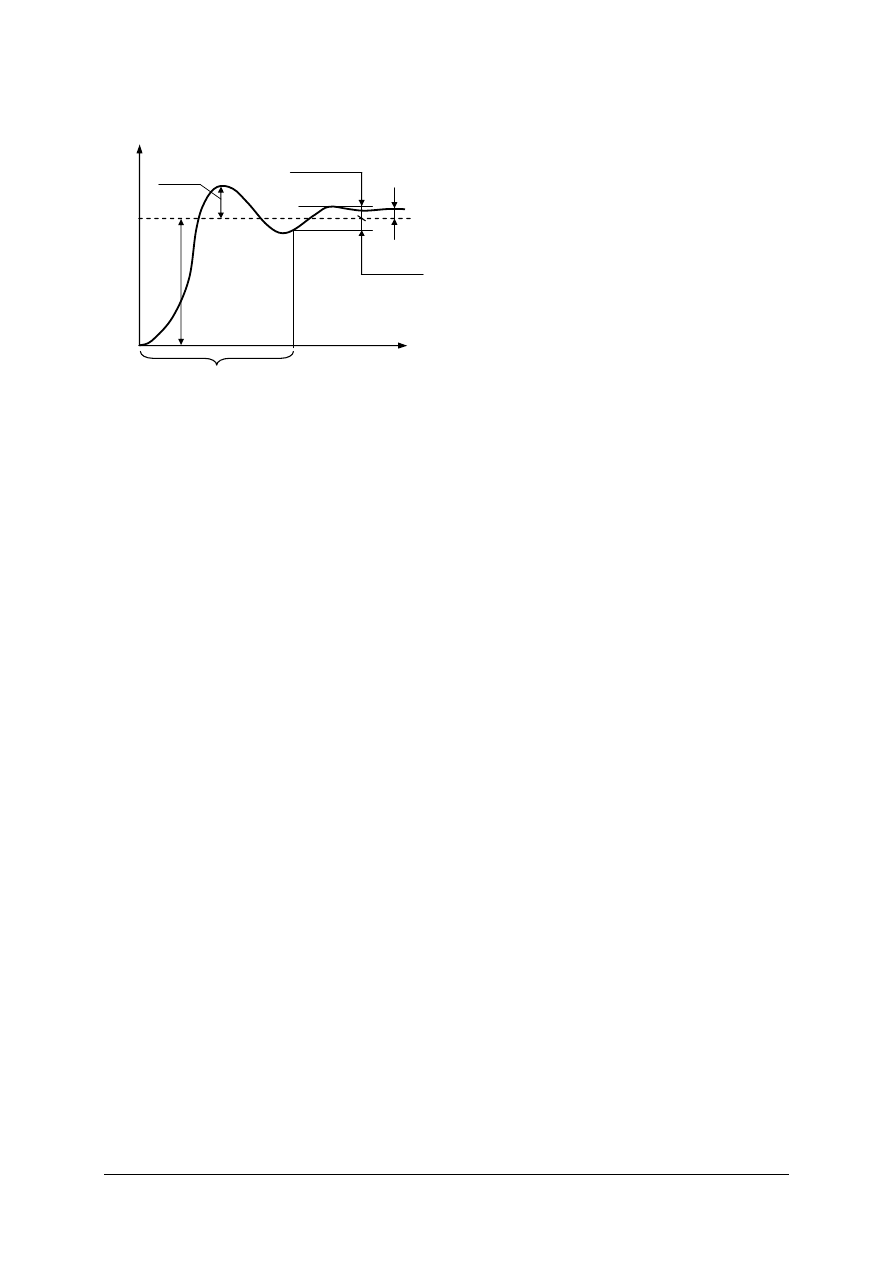
Cechami charakteryzującymi właściwości dynamiczne układów regulacji w odniesieniu
do przebiegu przejściowego wielkości regulowanej są:
−
uchyb (błąd) statyczny
ε
ust
– maksymalna różnica między wartością bieżącą a wartością
zadaną lub założoną sygnału wyjściowego obiektu w stanie ustalonym (rys. 17a),
−
czas regulacji T
u
– jest to czas, jaki upływa od momentu podania na wejście układu
wymuszenia skokowego aż do chwili, od której różnica między wielkością regulowaną
a jej wartością ustaloną nie przekracza
±
5%
∆
y (rys. 17a),
b)
a)
t
t
y
T
o
gdzie: k
o
−
wzmocnienie obiektu, T
c
−
stała czasowa całkowania obiektu
k
o
y
T
o
T
c
T
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
−
przeregulowanie
χ
– stosunek odchylenia maksymalnego do odchylenia w stanie
ustalonym (rys. 17a),
%
100
y
y
1
∆
∆
=
χ
gdzie:
1
y
∆
−
odchylenie maksymalne
y
∆
−
odchylenie w stanie ustalonym
−
stabilność – cecha układu regulacji charakteryzująca się tym, że układ wytrącony ze stanu
równowagi przez wymuszenie lub zakłócenie wraca do tego stanu po ustaniu
wymuszenia lub zakłócenia. Na rysunku 17b przedstawiono przebiegi wielkości
regulowanej układów stabilnych (A, B), będących na granicy stabilności
(C) i niestabilnych (D, E).
Rys. 17. Ilustracja pojęć: a) czasu regulacji, uchybu statycznego
i przeregulowania
χ
, b) stabilności; opracowano na podstawie [6,
s. 48, 3, s. 82]
Różnorodność obiektów, pod względem ich właściwości dynamicznych, wymaga
stosowania regulatorów o zróżnicowanych charakterystykach. Rozróżnia się następujące typy
regulatorów przemysłowych:
−
typu P (proporcjonalny, rys. 18). Charakteryzuje się tym, że wartość sygnału
wyjściowego jest proporcjonalna do wartości uchybu regulacji (sygnału wejściowego).
Rys. 18. Regulator proporcjonalny P: a) schemat blokowy, b) odpowiedź skokowa [opracowanie własne]
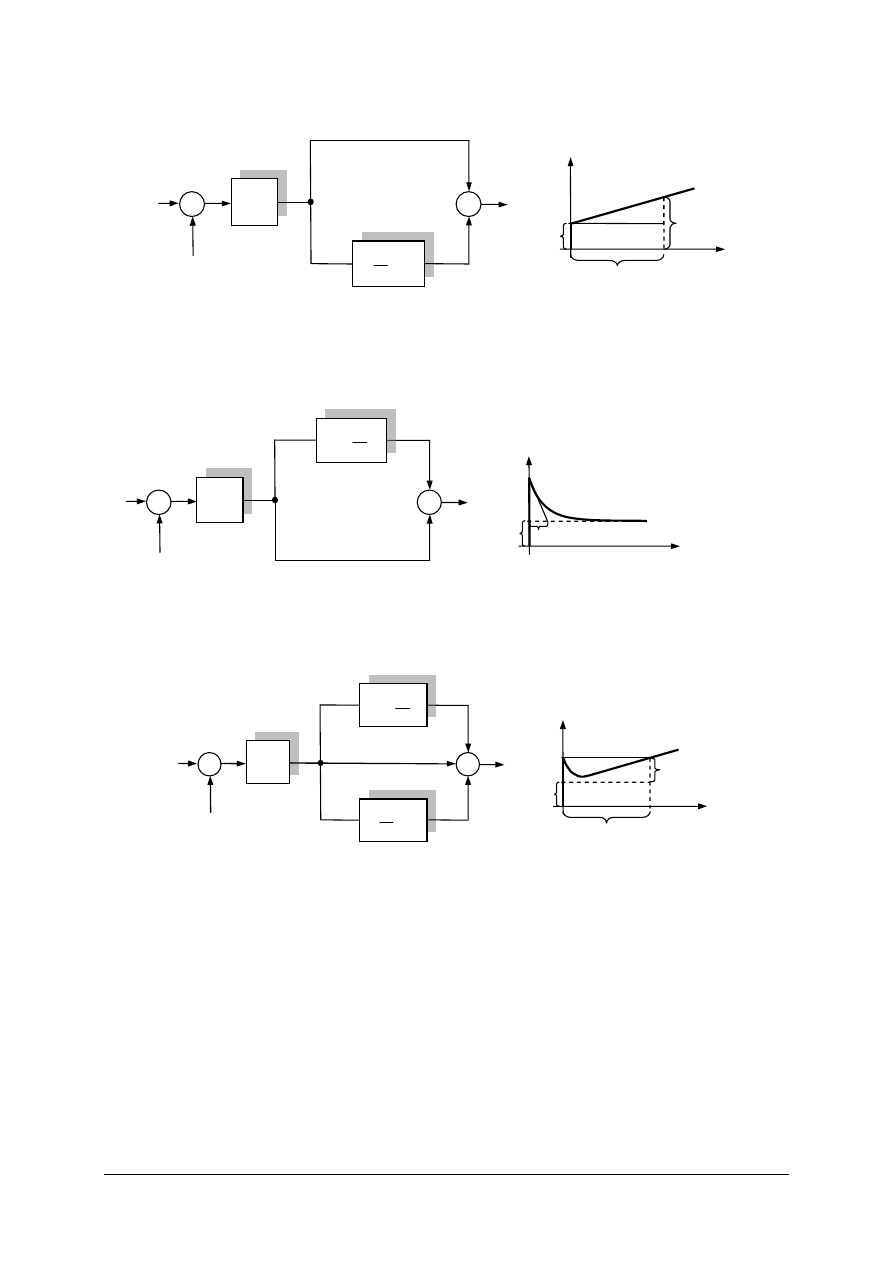
−
typu PI (proporcjonalno–całkujący, rys. 19). Charakteryzuje się tym, że sygnał
wyjściowy jest sumą działania proporcjonalnego i całkującego.
k
p
x
–
+
x
0
±
ε
y
a)
b)
y
t
0
k
p
ε
gdzie: k
p
−
wzmocnienie regulatora
∆
y
y
–5%
∆
y
+5%
∆
y
T
u
0
∆
y
1
y
a)
b)
t
t
ε
ust
A
B
C
D
E
y
ust
y
max
y
ust
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Rys. 19.
Regulator proporcjonalno–całkujący PI: a) schemat
blokowy, b) odpowiedź skokowa; opracowano na
podstawie [1, s. 168]
−
typu PD (proporcjonalny–różniczkujący, rys. 20). Charakteryzuje się tym, że wartość
sygnału wyjściowego jest proporcjonalna do prędkości zmian uchybu regulacji.
Rys. 20. Regulator
proporcjonalno–różniczkujący
PD:
a) schemat
blokowy, b) odpowiedź skokowa [opracowanie własne]
−
typu PID (proporcjonalno–całkująco–różniczkujący, rys. 21). Jest to regulator złożony
z trzech podstawowych członów: proporcjonalnego, różniczkującego i całkującego.
Rys. 21. Regulator proporcjonalno–różniczkująco–całkujący PID: a) schemat
blokowy, b) odpowiedź skokowa; opracowano na podstawie [1, s. 171]
Regulatory są wykonywane jako elektryczne, pneumatyczne i hydrauliczne.
k
p
∫
dt
T
1
i
x
–
+
x
0
±
ε
y
+
+
y
t
0
T
i
a)
b)
k
p
ε
2k
p
ε
t
k
p
x
–
+
x
0
±
ε
y
+
+
y
0
a)
b)
k
p
ε
dt
d
T
d
T
d
k
p
∫
dt
T
1
i
x –
+
x
0
±
ε
y
+
+
y
t
0
T
i
a)
b)
k
p
ε
dt
d
T
d
k
p
ε
+
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
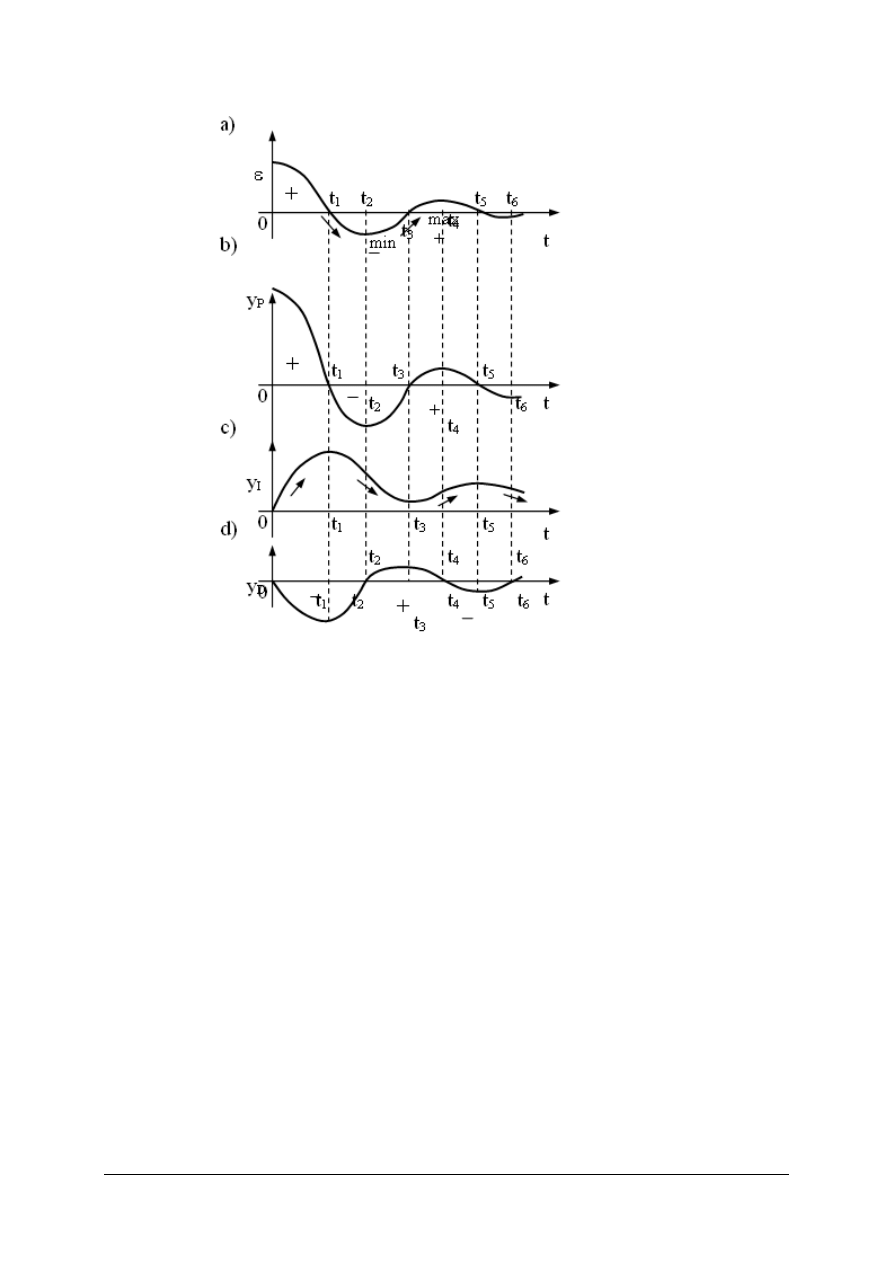
Rys. 22. Działanie członów formujących sygnał sterujący regulatora: a) przykładowy przebieg
sygnału wejściowego i odpowiadające mu przebiegi sygnałów wyjściowych członów,
b) proporcjonalnego, c) całkującego, d) różniczkującego; opracowano na podstawie
[3, s. 78]
Na rysunku 22 przedstawiono zależność sygnału wyjściowego od sygnału wejściowego
członów wchodzących w skład regulatorów; człon proporcjonalny działa jak wzmacniacz
(rys. 22b), człon całkujący wytwarza sygnał narastający, gdy sygnał wejściowy uchybu
jest dodatni lub malejący, gdy sygnał wejściowy jest ujemny (rys. 22c). Człon różniczkujący
gwarantuje sygnał dodatni w przypadku, gdy sygnał wejściowy narasta, lub ujemny,
gdy sygnał wejściowy maleje (rys. 22d).
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Czym charakteryzuje się układ regulacji stałowartościowej?
2. Czym charakteryzuje się układ regulacji nadążnej?
3. Czym charakteryzuje się układ regulacji programowej?
4. Czym charakteryzuje się układ regulacji ekstremalnej?
5. Czym charakteryzuje się układ regulacji adaptacyjnej?
6. W jaki sposób obliczamy przeregulowanie?
7. W jaki sposób wyznaczamy stałą czasową?
8. Po czym poznać, że układ jest stabilny?
9. Jakie znasz typy regulatorów przemysłowych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
4.4.3. Ćwiczenia
Ćwiczenie 1
Do opisanych przykładów dopasuj typy układów regulacji.
Tabela do ćwiczenia 1
Przykład zastosowania
Typ układu regulacji
regulacja poziomu cieczy w zbiorniku przeciwpożarowym
stałowartościowa
sterowanie pralki automatycznej
nadążna
regulacja temperatury w piecu
ekstremalna
sterowanie radarem
programowa
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dopasować typ układu regulacji,
2) przeprowadzić analizę wyboru,
3) opracować wnioski.
Wyposażenie stanowiska pracy:
–
arkusze papieru formatu A4.
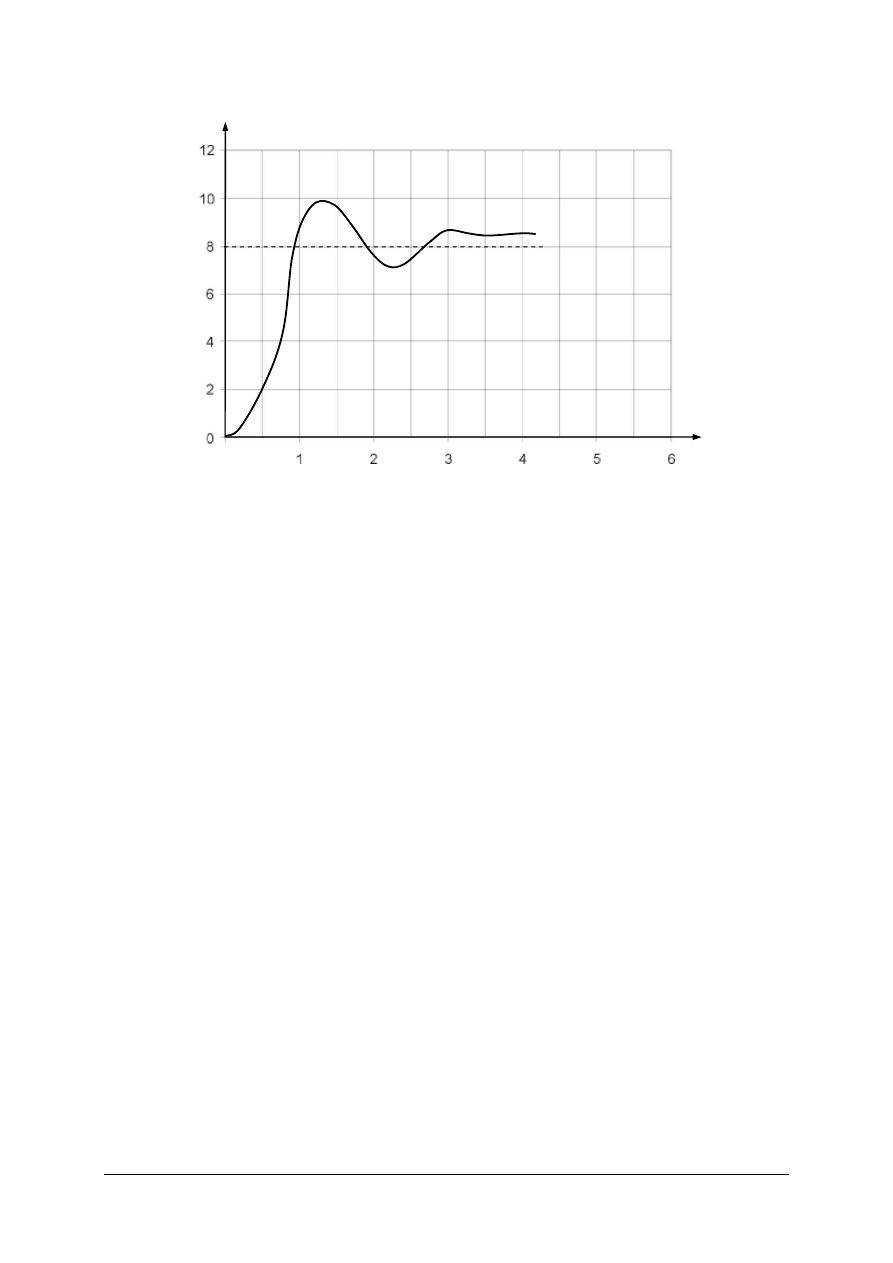
Ćwiczenie 2
Wyznacz wielkości odchyleń zmiennej regulowanej y od jej wartości początkowej.
Oblicz przeregulowanie
χ
oraz wyznacz czas regulacji T
u
.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wykreślić odchylenia,
2) wyznaczyć
1
p
∆
, p
∆
oraz czas regulacji T
u
,
3) obliczyć przeregulowanie
χ
,
4) dokonać analizy otrzymanych wyników,
5) opracować wnioski.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. do ćwiczenia 2 [opracowanie własne]
Wyposażenie stanowiska pracy:
−
arkusze papieru formatu A4,
−
ołówek, linijka,
–
kalkulator.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić typ układu regulacji?
2)
wyznaczyć wielkości odchyleń zmiennej regulowanej y?
3)
wyznaczyć czas regulacji T
u
z przebiegu oscylacyjnego?
4)
obliczyć przeregulowanie
χ
z przebiegu oscylacyjnego?
5)
dokonać analizy wyników obliczeń?
t [s]
p [kPa]
y
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
4.5. Dobór nastaw regulatorów
4.5.1. Materiał nauczania
W rozdziale 4.4.1. poznałeś już właściwości typowych regulatorów przemysłowych.
Dobór nastaw regulatora stanowi jeden z etapów kształtowania właściwości dynamicznych
układów regulacji automatycznej. Do wyznaczenia nastaw potrzebna będzie jeszcze opis
budowy regulatora. W regulatorach wartość poszczególnych parametrów nastawiamy za
pomocą pokręteł zaopatrzonych w podziałki lub przyciski. Należy pamiętać, że nie wszystkie
regulatory mają możliwości nastaw, ponieważ rodzaj nastaw przypisany jest właściwościom
poszczególnych regulatorów (tabela 3):
−
x
p
– zakres proporcjonalności regulatora. Jest to odwrotność wzmocnienia k
p
wyrażona
w procentach,
%
100
k
1
x
p
p
=
−
T
i
– czas zdwojenia (izodromu). Jest to czas, po którym sygnał wyjściowy z regulatora
typu PI osiąga (po wymuszeniu skokowym) dwukrotnie większą wartość
niż w regulatorze typu P w stosunku do wartości początkowej,
−
T
d
– czas wyprzedzenia. Określa właściwości członu różniczkującego regulatora.
Tabela 3. Możliwości nastaw regulatorów przemysłowych
x
p
T
i
T
d
P
+
−
−
PI
+
+
−
PD
+
−
+
PID
+
+
+
Istnieje wiele metod doboru nastaw regulatora. Jedną z możliwości jest określanie nastaw
według cech przebiegu przejściowego przy wymuszeniu skokowym. Cechy przebiegu uchybu
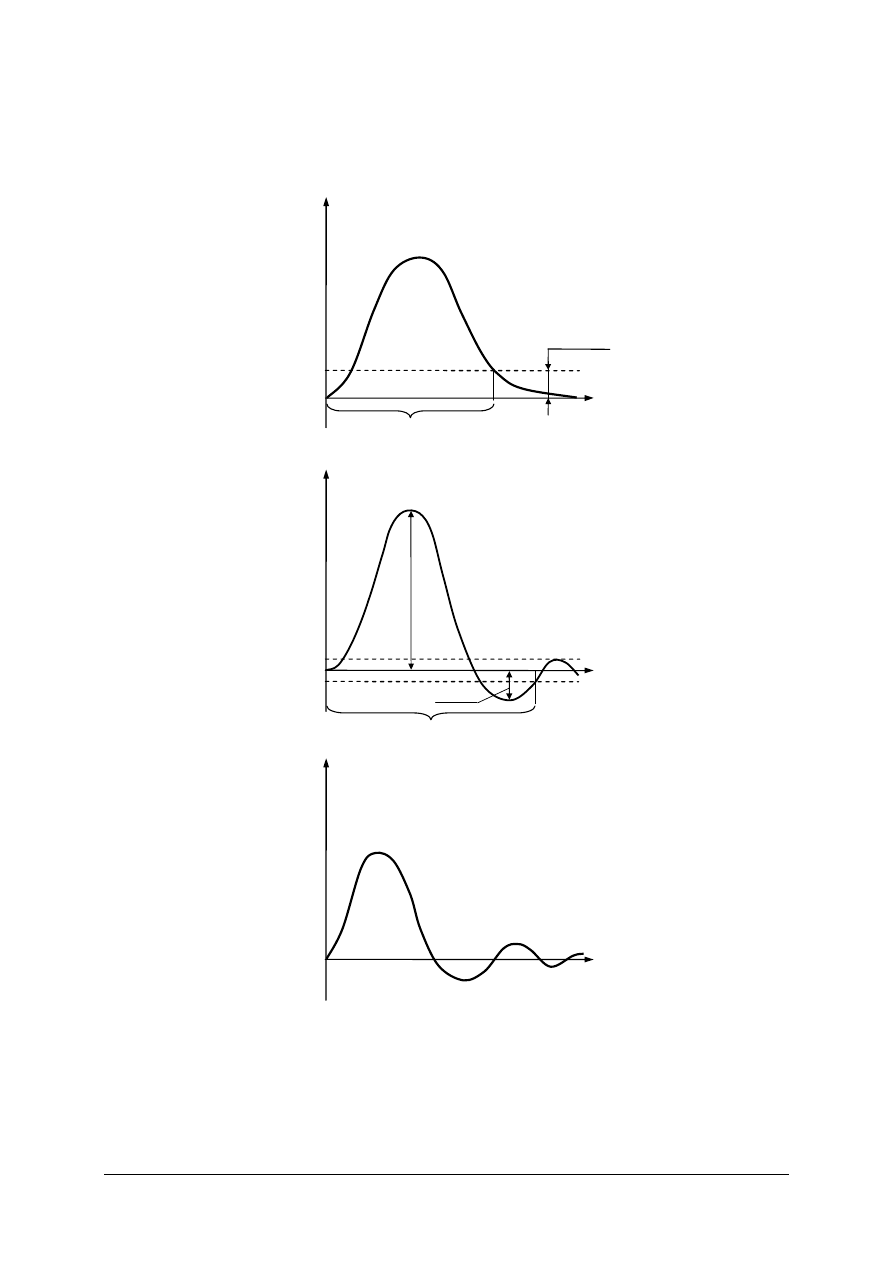
mogą być określone według wymagań stawianym układom regulacji:
−
prędkość działania (rys. 23a),
−
wartość przeregulowań (rys. 23b),
−
uchyb ustalony (rys. 23c).
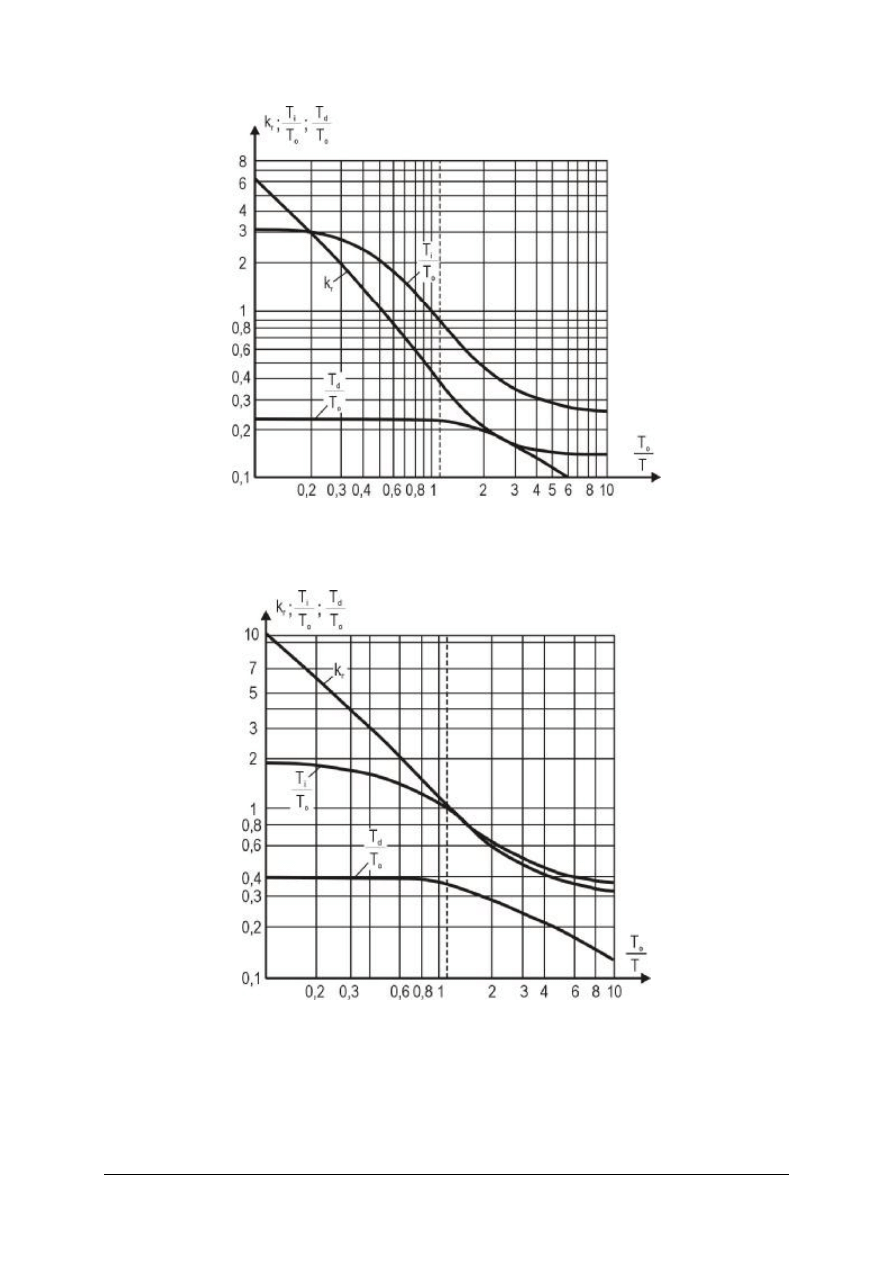
Nastawy określa się na podstawie nomogramów, które są opracowywane dla
następujących typów obiektów regulowanych:
−
obiektu statycznego,
−
obiektu astatycznego.
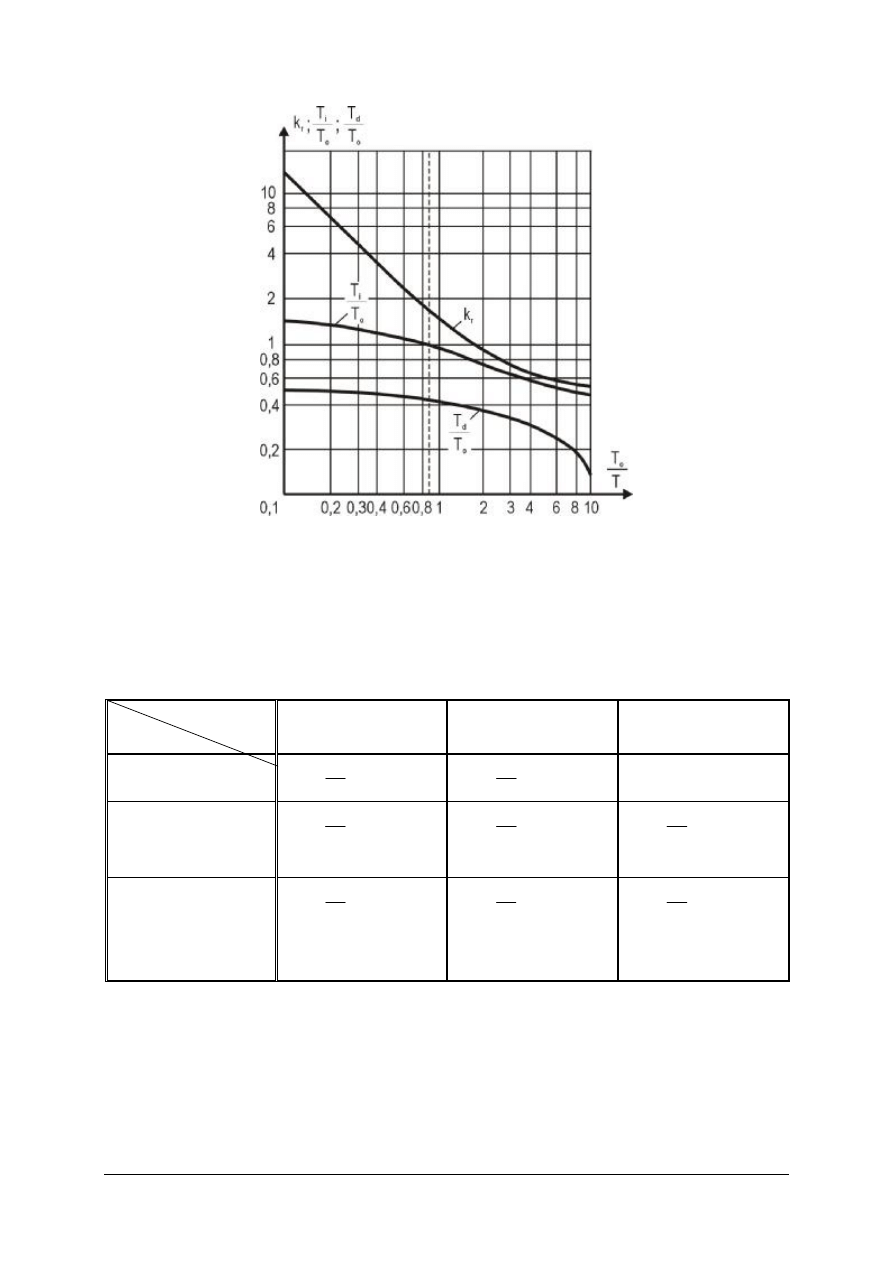
Na rysunkach 24
÷
26 przedstawiono optymalne nastawy dla regulatora typu PID dla
obiektów statycznych. Poniżej przedstawiono przykładowy sposób wyznaczania nastaw
z nomogramu. Posiadając wartości liczbowe
s
8
,
0
T
o
=
i
s
2
T
=
obliczamy wskaźnik
podatności regulacyjnej obiektu
4
,
0
T
T
o
=
. Następnie z nomogramu (rys. 24) dla wartości
4
,
0
T
T
o
=
odczytujemy:
5
,
1
k
r
=
;
45
,
2
T
T
o
i
=
oraz
23
,
0
T
T
o
d
=
. Uwzględniając odczytane
nastawa
regulator
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
wartości oraz
o
p
r
k
k
k
⋅
=
(gdzie
5
k
o
=
) obliczamy:
%
333
x
3
,
0
k
p
p
=
⇒
=
;
s
96
,
1
T
i
=
;
s
18
,
0
T
d
=
.
Rys. 23.
Kryteria optymalności nastaw regulatorów: a) przebieg aperiodyczny z minimalnym
czasem T
u
, b) przebieg oscylacyjny z przeregulowaniem 20% i minimum czasu T
u
,
c) przebieg oscylacyjny z wartością minimalną całki kwadratu uchybu; opracowano na
podstawie [4, s. 90]
ε
5%
ε
T
u
0
a)
t
ε
1
ε
T
u
0
b)
t
5%
ε
ε
2
ε
0
c)
t
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 24. Optymalne nastawy regulatora PID według kryterium przebiegu
aperiodycznego z minimalnym czasem T
u
; opracowano na podstawie
[4, s 92]
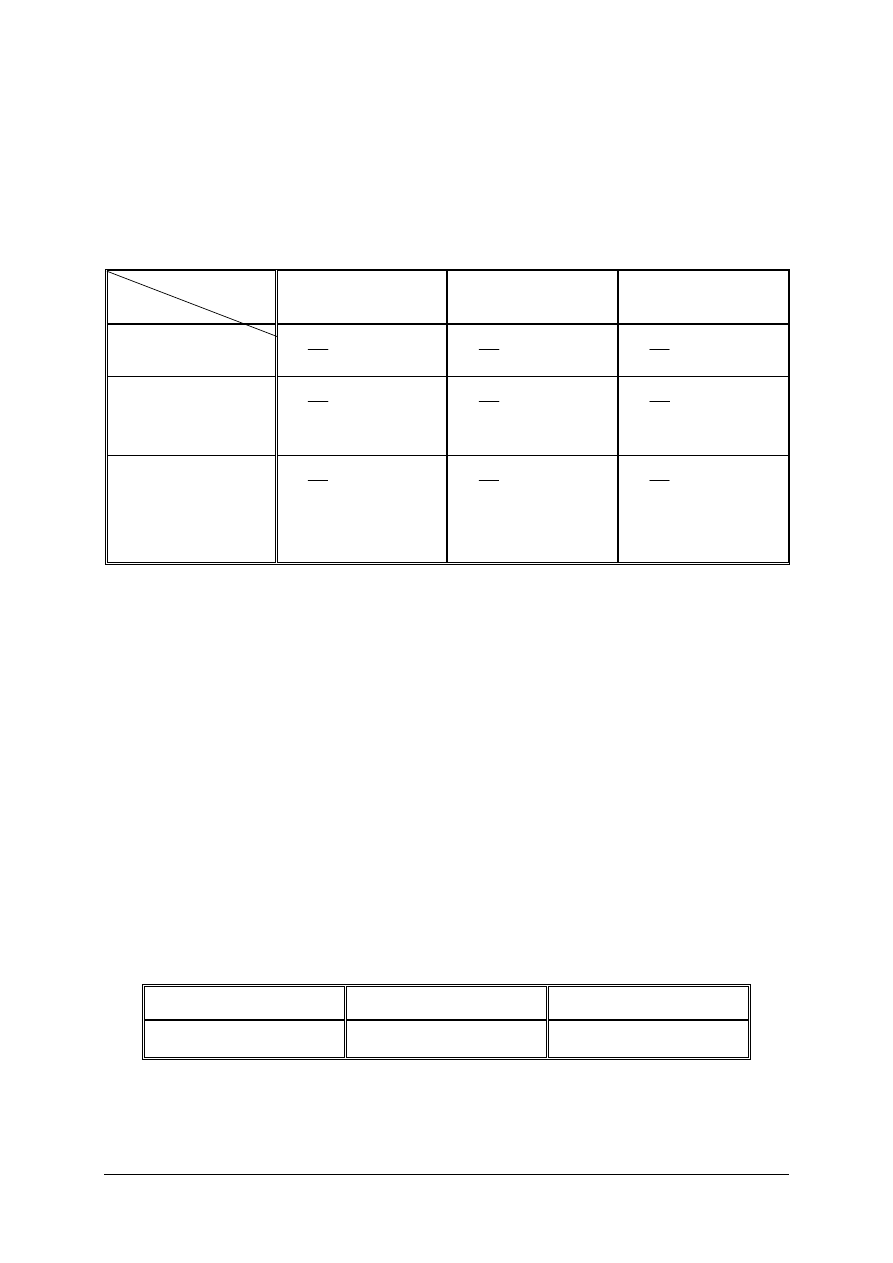
Rys. 25. Optymalne nastawy regulatora PID według kryterium przebiegu oscylacyjnego
z przeregulowaniem 20% i minimum czasu T
u
; opracowano na podstawie
[4, s. 92]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
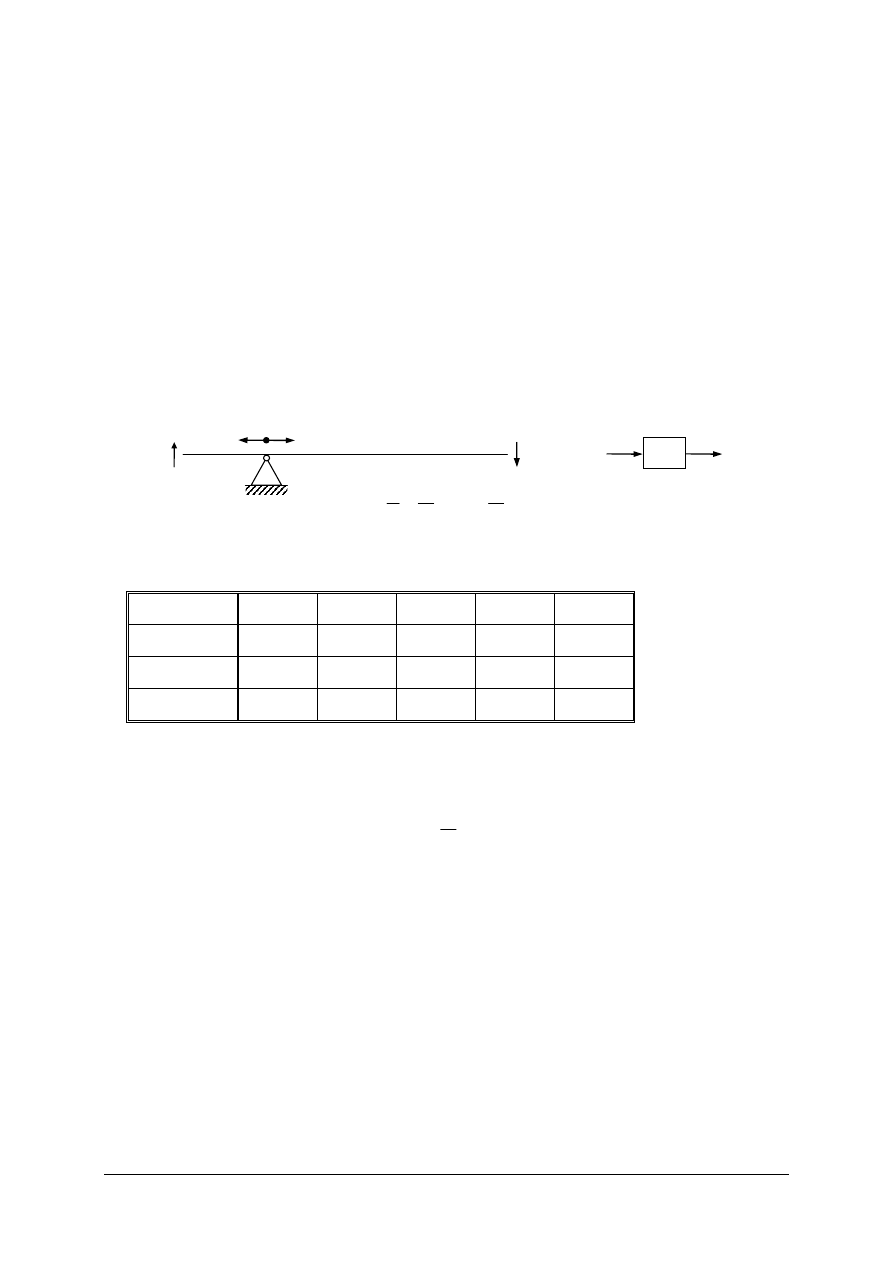
Rys. 26. Optymalne nastawy regulatora PID według kryterium
minimum całki kwadratu uchybu; opracowano na
podstawie [4, s. 92]
Drugą z metod, przy znanych charakterystykach dynamicznych obiektu, jest obliczanie
nastaw regulatorów korzystając ze wzorów zestawionych w tabeli 4 dla obiektu statycznego
oraz w tabeli 5 dla obiektu astatycznego.
Tabela 4. Wzory do obliczania nastaw dla regulatorów współpracujących z obiektami statycznymi; opracowano
na podstawie [2, s. 154]
przebiegu
aperiodycznego
z min. T
u
przebiegu oscylacyjnego
z
%
20
=
χ
i min. T
u
min.
całki
kwadratu
uchybu
P
9
,
0
T
T
k
k
o
o
p
=
7
,
0
T
T
k
k
o
o
p
=
PI
T
5
,
0
T
8
,
0
T
6
,
0
T
T
k
k
o
i
o
o
p
+
=
=
T
3
,
0
T
T
7
,
0
T
T
k
k
o
i
o
o
p
+
=
=
T
3
,
0
T
T
1
T
T
k
k
o
i
o
o
p
+
=
=
PID
o
d
o
i
o
o
p
T
4
,
0
T
T
4
,
2
T
95
,
0
T
T
k
k
=
=
=
o
d
o
i
o
o
p
T
4
,
0
T
T
2
T
2
,
1
T
T
k
k
=
=
=
o
d
o
i
o
o
p
T
5
,
0
T
T
3
,
1
T
4
,
1
T
T
k
k
=
=
=
W przypadku, gdy nieznana jest charakterystyka dynamiczna obiektu nastawy dobiera
się metodą opracowaną przez Zieglera i Nicholsa. W celu określenia wartości wzmocnienia
krytycznego k
kryt
oraz okresu oscylacji T
kryt
należy przeprowadzić następujące czynności
(regulator musi być połączony z obiektem):
−
w przypadku regulatora PID wyłączyć działanie części całkującej (nastawić
∞
→
i
T
)
oraz części różniczkującej (nastawić
0
T
d
=
),
kryterium
regulator
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
−
zwiększając stopniowo wzmocnienie regulatora k
p
doprowadzić układ do granicy
stabilności (uzyskać przebieg wielkości regulowanej oscylacyjny o stałej amplitudzie),
−
zanotować wartość k
p
i oznaczyć jako k
kryt
,
−
z otrzymanego przebiegu wielkości regulowanej (lub za pomocą stopera) określić okres
oscylacji T
kryt
.
Tabela 5. Wzory do obliczania nastaw dla regulatorów współpracujących z obiektami astatycznymi;
opracowano na podstawie [2, s. 154]
przebiegu
aperiodycznego
z min. T
u
przebiegu oscylacyjnego
z
%
20
=
χ
i min. T
u
min.
całki
kwadratu
uchybu
P
5
,
0
T
T
k
c
o
p
=
7
,
0
T
T
k
c
o
p
=
1
T
T
k
c
o
p
=
PI
o
i
c
o
p
T
5
T
5
,
0
T
T
k
=
=
o
i
c
o
p
T
3
T
7
,
0
T
T
k
=
=
o
i
c
o
p
T
3
,
4
T
1
T
T
k
=
=
PID
o
d
o
i
c
o
p
T
23
,
0
T
T
5
T
65
,
0
T
T
k
=
=
=
o
d
o
i
c
o
p
T
37
,
0
T
T
2
T
1
,
1
T
T
k
=
=
=
o
d
o
i
c
o
p
T
5
,
0
T
T
6
,
1
T
3
,
1
T
T
k
=
=
=
W zależności od typu stosowanego regulatora należy obliczyć nastawy według
następujących wzorów:
−
dla regulatora typu P
kryt
p
k
5
,
0
k
=
−
dla regulatora typu PI
kryt
p
k
45
,
0
k
=
kryt
i
T
75
,
0
T
=
−
dla regulatora typu PID
kryt
p
k
6
,
0
k
=
kryt
i
T
5
,
0
T
=
kryt
d
T
12
,
0
T
=
Przy wyborze tej metody należy zwrócić uwagę, czy względy technologiczne pozwalają
na doprowadzenie układu do granicy stabilności, co praktycznie nie zawsze jest dopuszczalne.
Regulatory mają ograniczony zakres nastaw. Typowe wartości nastaw w regulatorach
przemysłowych zebrano w tabeli 6.
Tabela 6. Typowe wartości nastaw w regulatorach przemysłowych
x
p
T
i
T
d
500
÷
1%
(kp=0,2
÷
100)
0,1
÷
30min
0,05
÷
20min
kryterium
regulator
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz nastawy regulatora?
2. W jaki sposób obliczamy zakres proporcjonalności x
p
?
3. Jakie występują kombinacje nastaw w różnych typach regulatorów?
4. Jakie są kryteria optymalności nastaw regulatorów?
5. Jakie znasz metody doboru nastaw regulatorów?
6. Jakie typowe wartości nastaw występują w regulatorach przemysłowych?
4.5.3. Ćwiczenia
Ćwiczenie 1
Wyznacz zakres proporcjonalności x
p
dla dźwigni regulatora pływakowego
przedstawionej na rysunku.
Rys. do ćwiczenia 1; opracowano na podstawie [8, s. 34]
Tabela do ćwiczenia 1
l
1
[cm]
20
25
50
50
100
l
2
[cm]
100
75
50
100
100
k
p
[cm/cm]
x
p
[%]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wyznaczyć wzmocnienie regulatora
1
2
p
l
l
k
=
,
2) obliczyć zakres proporcjonalności x
p
,
3) dokonać analizy otrzymanych wyników,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
−
arkusze papieru formatu A4,
−
ołówek, linijka,
−
kalkulator.
x
y
l
1
l
2
y
x
x
l
l
y
l
l
y
x
1
2
2
1
=
→
=
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
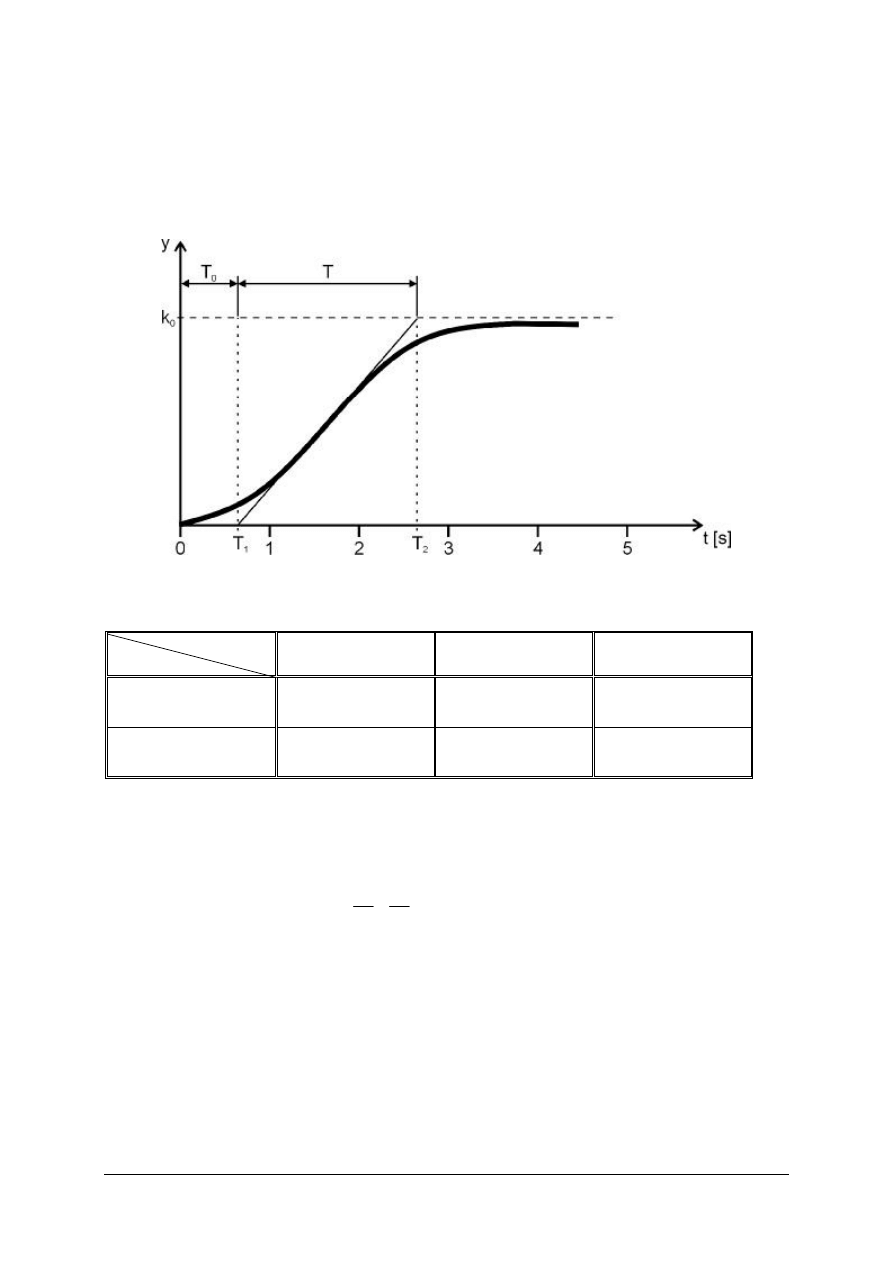
Ćwiczenie 2
Znając charakterystykę skokową obiektu, mając dane
s
T
6
,
0
1
=
,
s
T
8
,
2
2
=
i
7
k
o
=
dobierz
nastawy regulatora PID wg kryterium:
−
przeregulowanie co najwyżej 20% (rys. 25 poradnika),
−
minimum całki z kwadratu uchybu (rys. 26 poradnika).
Rys. do ćwiczenia 2; opracowano na podstawie [6, s. 95]
Tabela do ćwiczenia 2
x
p
T
i
T
d
przeregulowanie co
najwyżej 20%
minimum całki
z kwadratu uchybu
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) z charakterystyki skokowej wyznaczyć czas opóźnienia T
o
oraz stałą czasową T,
2) z nomogramów odczytać: k
r
,
o
i
T
T
,
o
d
T
T
,
3) uwzględniając odczytane wartości oraz
o
p
r
k
k
k
⋅
=
obliczyć nastawy,
4) wyniki przedstawić w tabeli,
5) dokonać analizy otrzymanych wyników,
6) opracować wnioski.
Wyposażenie stanowiska pracy:
–
arkusze papieru formatu A4,
–
ołówek, linijka,
–
kalkulator.
nastawy
kryterium

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Ćwiczenie 3
Określ wartości nastaw dla regulatora typu PID korzystając z reguł Zieglera
−
Nicholsa
przy wzmocnieniu
6
,
0
k
kryt
=
oraz okresie oscylacji
s
kryt
T
4
,
3
=
.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odszukać zależności matematyczne,
2) uwzględniając wartości obliczyć nastawy,
3) dokonać analizy otrzymanych wyników,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
−
arkusze papieru formatu A4,
–
kalkulator.
Ćwiczenie 4
Obiekt statyczny regulacji o parametrach:
V
/
C
1
k
o
o
=
,
s
10
T
o
=
i
s
100
T
=
poddano
regulacji za pomocą regulatora PID. Wyznacz nastawy dla kryterium przeregulowanie
co najwyżej 20%.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odszukać w tabeli odpowiednie wzory,
2) uwzględniając wartości obliczyć nastawy,
3) dokonać analizy otrzymanych wyników,
4) opracować wnioski.
Wyposażenie stanowiska pracy:
–
tablica z wzorami do obliczeń,
−
arkusze papieru formatu A4,
−
ołówek, linijka,
–
kalkulator.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyznaczyć zakres proporcjonalności?
2)
dobrać nastawy regulatora PID według różnych kryteriów?
3)
dobrać nastawy regulatora PID wg reguły Zieglera–Nicholsa?
4)
dokonać analizy otrzymanych wartości nastaw?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem
a następnie ponownie zakreślić odpowiedź prawidłową.
5. Zadania wymagają prostych obliczeń, które powinieneś wykonać przed wskazaniem
poprawnego wyniku.
6. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawdziwa.
7. Pracuj samodzielnie, gdyż tylko wówczas będziesz miał satysfakcję z wykonanego
zadania.
8. Jeśli udzielanie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny.
9. Na rozwiązanie testu masz 25 minut.
Powodzenia!
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
ZESTAW ZADAŃ TESTOWYCH
1. Sterowanie automatyczne realizowane jest
a) bezpośrednio przez człowieka.
b) bezpośrednio przez urządzenia bez udziału człowieka.
c) bezpośrednio przez urządzenia i człowieka.
d) krok po kroku.
2. Uchyb ε wyznaczamy z różnicy
a) sygnału sterującego i zakłóceń.
b) sygnału wartości zadanej i sygnał uchybu.
c) zadanej i rzeczywistej wartości wielkości regulowanej.
d) sygnału zakłócającego i wartości zadanej.
3. Stałą czasową różniczkowania oznaczamy symbolem
a) T
i
.
b) T
d
.
c) x
p
.
d) k
p
.
4. Na rysunku przedstawiono
a) układ otwarty sterowania.
b) strukturę regulatora.
c) układ zamknięty sterowania.
d) strukturę urządzenia pomiarowego.
5. Węzeł sumujący
a) mnoży i dzieli sygnały.
b) dodaje i odejmuje sygnały.
c) porównuje sygnały.
d) przetwarza sygnał na inną wielkość fizyczną.
6. W sterowaniu sekwencyjnym
a) sygnał sterujący powstaje z powiązania logicznego sygnałów.
b) następuje linearyzacja charakterystyki.
c) nie występuje opóźnienie.
d) czynności odbywają się krok po kroku.
7. Standardowy sygnał prądowy to
a) 0–5 A.
b) 4–20 mA.
c) 0–10 mA.
d) 0–15 mA.
Urządzen
ie
Obiekt
z
x
y
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
8. W układzie statycznym wielkości wyjściowe zależą
a) od zmiany temperatury podczas mierzenia.
b) od wzmocnienia zastępczego.
c) od aktualnych wartości wejściowych.
d) nie tylko od aktualnych wartości wejściowych.
9. Charakterystyka statyczna jest liniowa
a) jeżeli istnieje proporcjonalność między sygnałami wyjścia a wejścia obiektu.
b) jeżeli występuje opóźnienie.
c) jeżeli można wyznaczyć wzmocnienie.
d) jeżeli zastosujemy odpowiedni regulator.
10. Współczynnik wzmocnienia wyznaczymy z zależności
a)
y
x
k
∆
+
∆
=
.
b)
x
y
k
∆
−
∆
=
.
c)
x
y
k
∆
∆
=
.
d)
y
x
k
∆
∆
=
.
11. Współczynnik wzmocnienia ma wymiar jednostkowy
a) w określonym przedziale wartości.
b) nigdy.
c) czasami.
d) zawsze.
12. W członie inercyjnym przy skokowej zmianie sygnału wejściowego po czasie równym
stałej czasowej T sygnał wyjściowy będzie miał wartość
a) 63,2% wartości ustalonej.
b) 75,5% wartości ustalonej.
c) 50,0% wartości ustalonej.
d) 95,1% wartości ustalonej.
13. Jeżeli
10
1
A
=
oraz
5
2
A
=
to współczynnik tłumienia
ξ
wynosi
a) 0,25.
b) 50.
c) 0,5.
d) 2.
y
t
0
A1
A2
y
x
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
14. Charakterystyki częstotliwościowe obiektu wyznaczane są za pomocą
a) przebiegu piłokształtnego.
b) przebiegu sinusoidalnego.
c) przebiegu trójkątnego.
d) przebiegu liniowo narastającego.
15. W układzie regulacji nadążnej
a) następuje zmiany algorytmu sterowania.
b) wartość zadana zmienia się w czasie według ściśle określonego programu.
c) wartość zadana zmienia się w czasie w sposób niedający się przewidzieć.
d) wartość zadana jest stała.
16. Urządzenie sterujące
a) oddziaływuje na obiekt sterowania.
b) wytwarza sygnał błędu regulacji.
c) mierzy wartość wielkości regulowanej.
d) porównuje wartość rzeczywistą z wartością zadaną.
17. Nastawami regulatora typu PI są
a)
p
x ,
i
T .
b)
p
x ,
d
T .
c)
p
x ,
i
T ,
d
T .
d)
i
T ,
d
T .
18. Regułę Zieglera–Nicholsa doboru nastaw regulatorów stosujemy, gd
a) jesteśmy w stanie przewidzieć zachowanie obiektu.
b) charakterystyka dynamiczna obiektu jest znana.
c) proces technologiczny nie wymaga stosowania drogiego sprzętu.
d) charakterystyka dynamiczna obiektu jest nieznana.
19. Przedstawiona odpowiedź skokowa jest odpowiedzią regulatora typu
a) PI.
b) P.
c) PD.
d) PID.
y
t
0
k
p
ε
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
20. Z przedstawionej odpowiedzi skokowej nie wyznaczymy
a) czasu regulacji.
b) przeregulowania.
c) czasu zdwojenia.
d) błędu statycznego.
∆
y
y
–5%
∆
y
+5%
∆
y
T
u
0
∆
y
1
t
ε
ust
y
us
t
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Analizowanie struktury układu regulacji i charakterystyk regulatorów
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
6. LITERATURA
1. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, W–wa 1997
2. Markowski A., Kostro J., Lewandowski A.: Automatyka w pytaniach i odpowiedziach.
WNT, W–wa 1979
3. Płoszajski G.: Automatyka. WSiP, W–wa 1995
4. Pochopień B.: Automatyka przemysłowa dla elektroników. WSiP, W–wa 1976
5. Schmid D.(red.): Mechatronika. REA, 2002
6. Siemieniako F., Gawrysiak M.: Automatyka i robotyka. WSiP, W–wa 1996
Wyszukiwarka
Podobne podstrony:
09 Analizowanie struktury układu regulacji
Analizowanie struktury układu regulacji i charakterystyk regulatorów
Analizowanie struktury układu regulacji i charakterystyk regulatorów
Analiza nieliniowego układu automatycznej regulacji - dwupołożeniowa regulacja temperatury(1) , Cel
Analiza podstawowych członów układu regulacji
struktura układu lokalnego
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
ESTYMACJA STATYSTYCZNA duża próba i analiza struktury, Semestr II, Statystyka matematyczna
ESTYMACJA STATYSTYCZNA2 duża próba i analiza struktury(2), Semestr II, Statystyka matematyczna
L2 PAA Modelowanie układu regulacji automatycznej z wykorzystaniem pakietu MATLAB Simulink(1)
Analiza struktury id 61534 Nieznany (2)
Struktura układu nerwowego, Prywatne, Studia, Fizjologia
zadanie o analizie struktury, statystyka i demografia-Hnatyszyn-Dzikowska ćwiczenia
19 Odprzęganie we wy, struktura układu, dynamika zerowa
Analiza struktury i dynamiki
Przemiennik? DC Wpływ parametrów układu regulacji na pracę napędu prądu stałego
Analiza struktury 2
analiza struktury odp
statystytka analiza struktury, A Egzamin zawodowy TECHNIK EKONOMISTA!
więcej podobnych podstron