
Materiały przygotowane i zebrane przez Matysa
1
1.
Co to jest para kinematyczna?
Para kinematyczna to ruchome połączenie dwóch ogniw
2.
Od czego zależy klasa pary kinematycznej?
Zależy od odebranych stopni swobody. Przy czym
Numer klasy = liczba odebranych stopni swobody
3.
Jak określić stopień ruchliwości łańcucha kinematycznego?
Należy skorzystać ze wzoru:
gdzie:
N - liczba ogniw łańcucha kinematycznego,
ω
=
∑
- liczbą par kinematycznych klasy i-tej
Stopień ruchliwości łańcucha po utwierdzeniu go w podłożu określony jest zależnością:
4.
Co to są kosinusy kierunkowe?
Kosinusami kierunkowymi nazywamy rzuty wersorów osi układu lokalnego na osie układu globalnego. Kosinusy
kierunkowe określają kierunek wektora.
5.
Podaj długość wektora jednorodnego |[4 2 4 6]|
√
6.
Jaka jest struktura operatora przekształcenia jednorodnego będącego złożeniem obrotu
i przesunięcia?
[
[ ] [ ]
[ ]
]
Gdzie: [ ] [
] – macierz obrotu [ ] [
] [ ] [ ]
7.
Jak wyznaczyć przekształcenie odwrotne do przekształcenia z poprzedniego pytania?.
[
[ ]
[ ]
[ ]
[ ]
]
8.
Ile zmiennych określa położenie układu współrzędnych względem innego układu, jeśli są
one usytuowane względem siebie zgodnie z zasadami Denavita -Hartenberga? Naszkicuj
rysunek i zaznacz te zmienne.
Są 4 zmienne:
- obrót układu o kąt
- translacja o odcinek d
- translacja o długość a ( x
i-1
pokrywa się z x
i
)
- obrót układu wokół x
i
o kąt
α
9.
Jak znaleźć prędkość kątową i-tego ogniwa manipulatora, znając prędkość kątową
ogniwa poprzedniego oraz niezbędne prędkości węzłowe?
̇
– prędkość kątowa i-tego węzła
– prędkość kątowa(i minus poprzedniego) węzła
– oś poprzednia względem osi i-tej
̇
– prędkość węzłowa i-tego węzła
i
– deskryptor {1 – dla pary obrotowej 0 – dla pary przesuwnej}
Materiały przygotowane i zebrane przez Matysa
2
10. Jak zależy wektor wszystkich prędkości końcówki technologicznej manipulatora od
prędkości węzłowych?
*
+ ̇
[
*
(
)+
]
11. Jak zależy wektor wszystkich przyśpieszeń końcówki technologicznej manipulatora od
wielkości węzłowych?
*
+ [
̇
̇]
̇ ̇ ̈
12. Zapisz ogólną postać modelu dynamiki manipulatora
̈ ̇ ̇
Gdzie: ̇ ̈ – położenie, prędkość, przyspieszenie D(q) – Macierz Grawitacji
M(q) – Macierz Bezwładności T(q) – Macierz tarcia
C(q. ̇) – Macierz sił odśrodkowych i Coriolisa F + u – siły działające na układ
13. Jak siły i momenty w układzie końcówki manipulatora zależą od momentów (i sił)
węzłowych?
[
]
[
]
[
]
Fx,Fy,Fz - składowe sił działające na końcówce
nx, ny, nz - składowe momentów działające na końcówkę
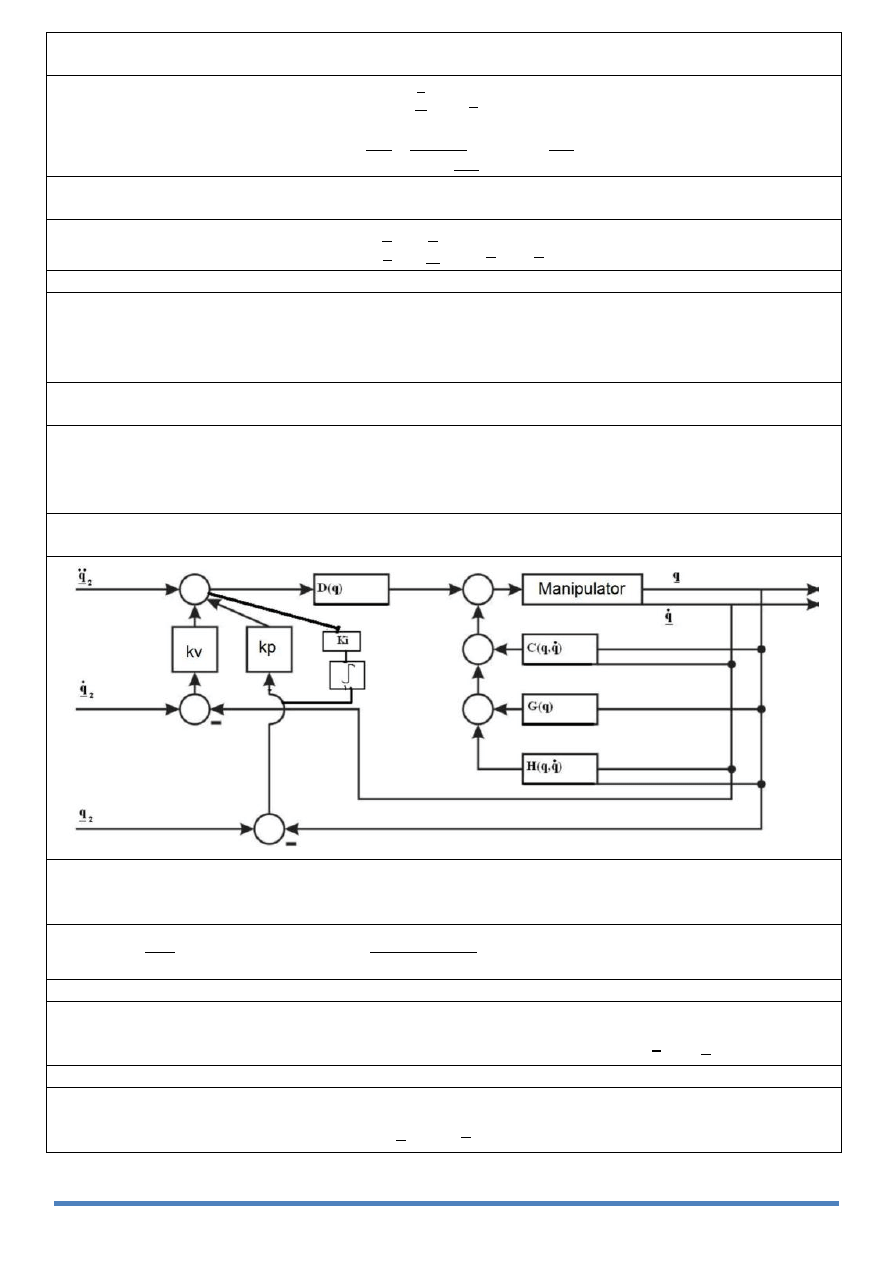
14. Naszkicuj ogólny schemat układu sterowania manipulatora z obliczanym momentem i
linearyzującym sprzężeniem zwrotnym.
15. Podaj transmitancję pomiędzy napięciem sterującym (netto, tzn. po odliczeniu siły
przeciw elektromotorycznej) silnika obcowzbudnego prądu stałego a momentem
rozwijanym przez ten silnik w węźle manipulatora.
16. Co to znaczy rozwiązać proste zadanie kinematyki manipulatora?
Rozwiązać zadanie proste kinematyki manipulatora to wyznaczyć położenie i orientację końcówki
technologicznej w przestrzeni roboczej, gdy znane są współrzędne konfiguracyjne.
17. Co to znaczy rozwiązać odwrotne zadanie kinematyki manipulatora?
Zadanie odwrotne to zadanie o sterowaniu i polega na wyznaczeniu współrzędnych kinematycznych na
podstawie trajektorii.
Wyszukiwarka
Podobne podstrony:
egzamin 2007, II rok, II rok CM UMK, Giełdy, 2 rok, II rok, giełdy od Nura, fizjo, egzamin, New fold
egzaminy 2007
egzamin 2007 08
pytania z testowe z egzaminów 2007 2008, Prywatne, FIZJOLOGIA od LILI, pytania
Egzamin 2007, materiały medycyna SUM, patofizjologia, egzamin
matma egzamin 2007, uczelnia, matematyka finansowa
Instytucje i pojecia prawa administracyjnego egzamin 2007-2008, pliki zamawiane, edukacja
Egzamin 2007(1), patomorfologia TESTY
nowecz egzaminu 2007, geomechanika - stosy III
egzamin 2 2007 wraz z rozwiazania, chemia organiczna
EGZ 2010, PYTANIA EGZAMINACYJNE 2007/2008
botanika egzamin 2007 185, Science ^^, Farmacja, 1 rok, Botanika, egzamin
egzamin 2007 zestaw 1 i 2
3114 tematy,na,egzamin,2007 CRC-9ABA6E52
egzamin 2007 01 30
Histologia - egzamin 2007-08, LEKARSKO-DENTYSTYCZNY GUMED, I ROK, Histologia, Giełda
AP egzamin 2007- kilka uwag, TESTY
Patofizjologia - egzamin - 2007, Studia, Patofizjologia, Testy, Egzamin
więcej podobnych podstron