
Wprowadzenie
do algebry wektorów
Wektory:
-wartość liczbowa = długość, moduł (skalar, dodatni)
-kierunek i zwrot
-operacje dodawania - reguła równoległoboku
Symbolika:
wektor:
a, r, a, r
moduł wektora (długość): a, r, a , r , a , r
repr.graficzna
(w skali)
wektory swobodne kolinearne, komplanarne
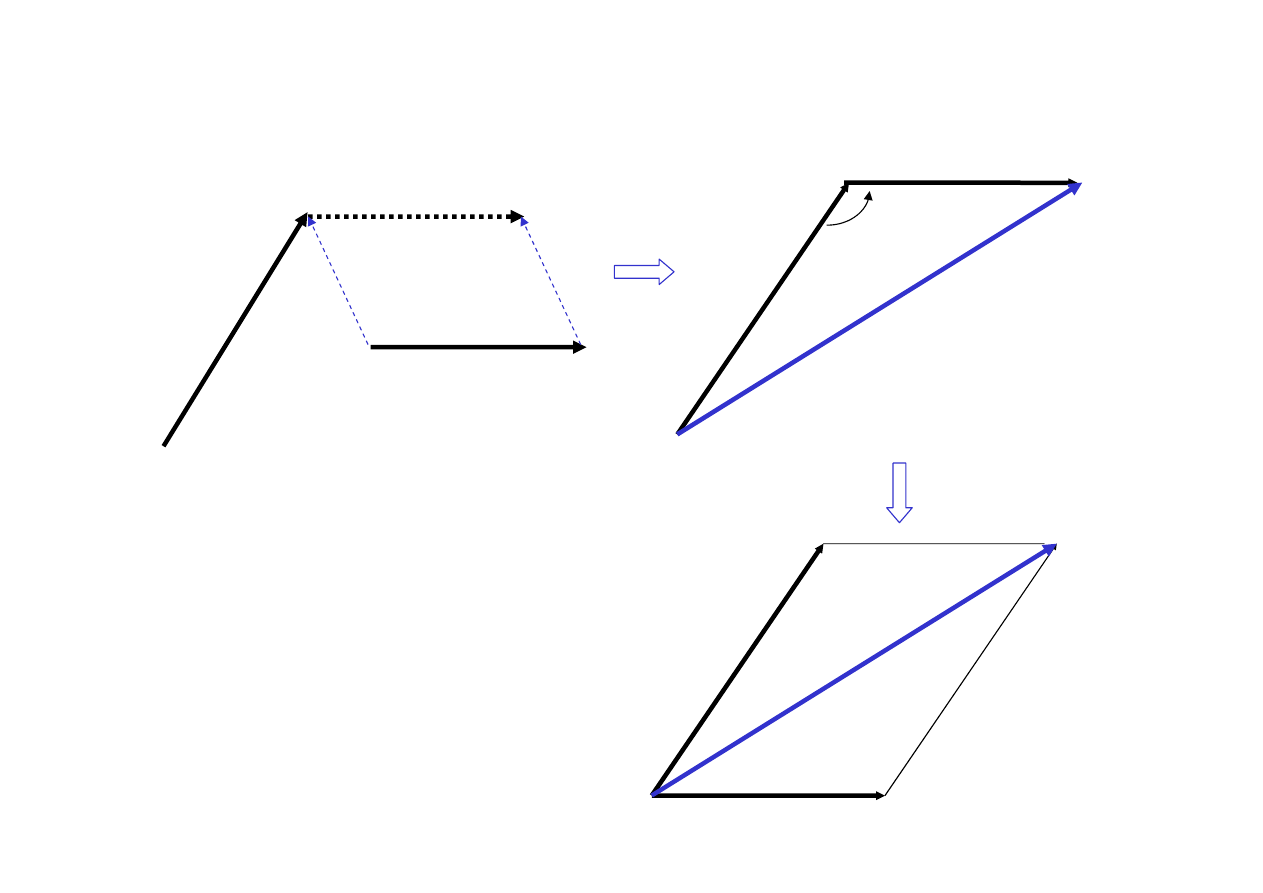
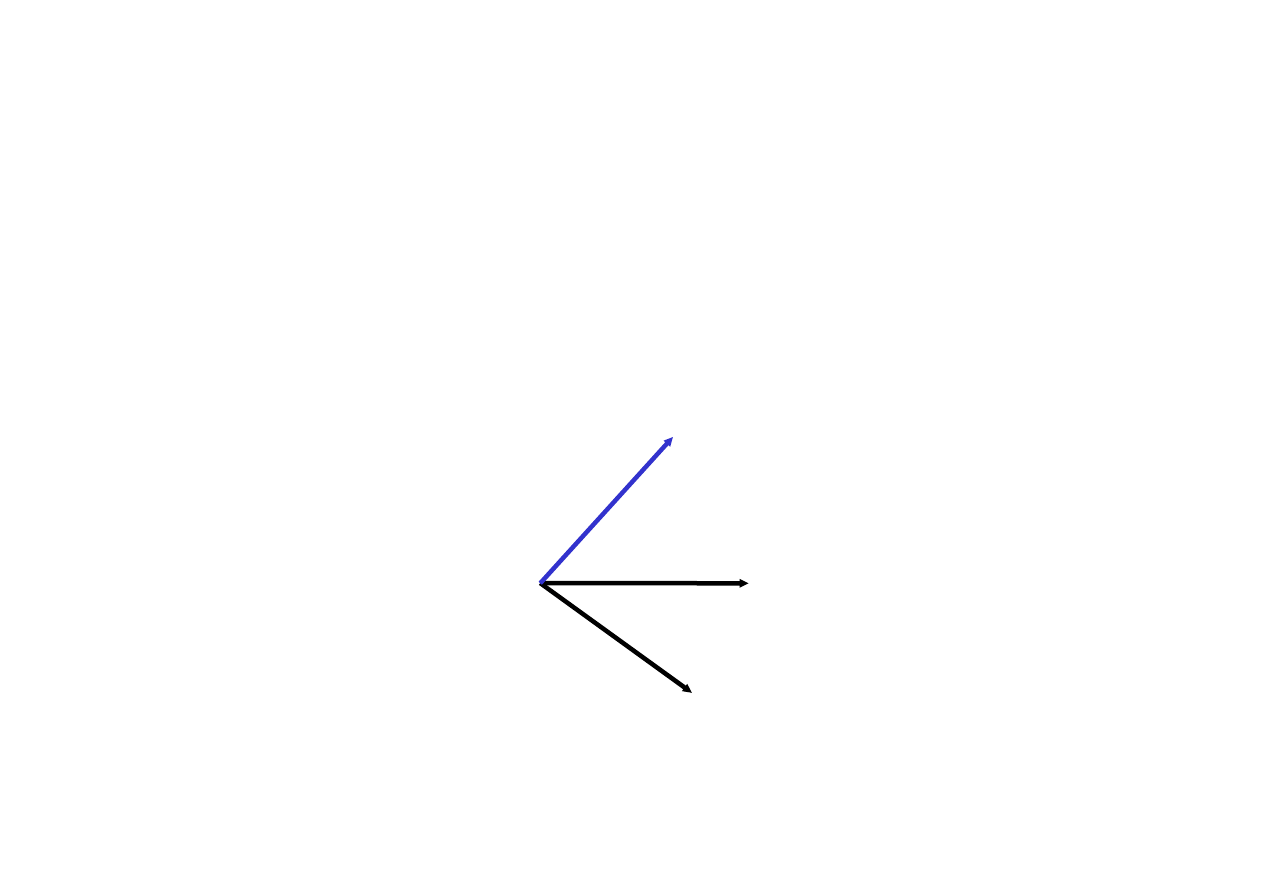
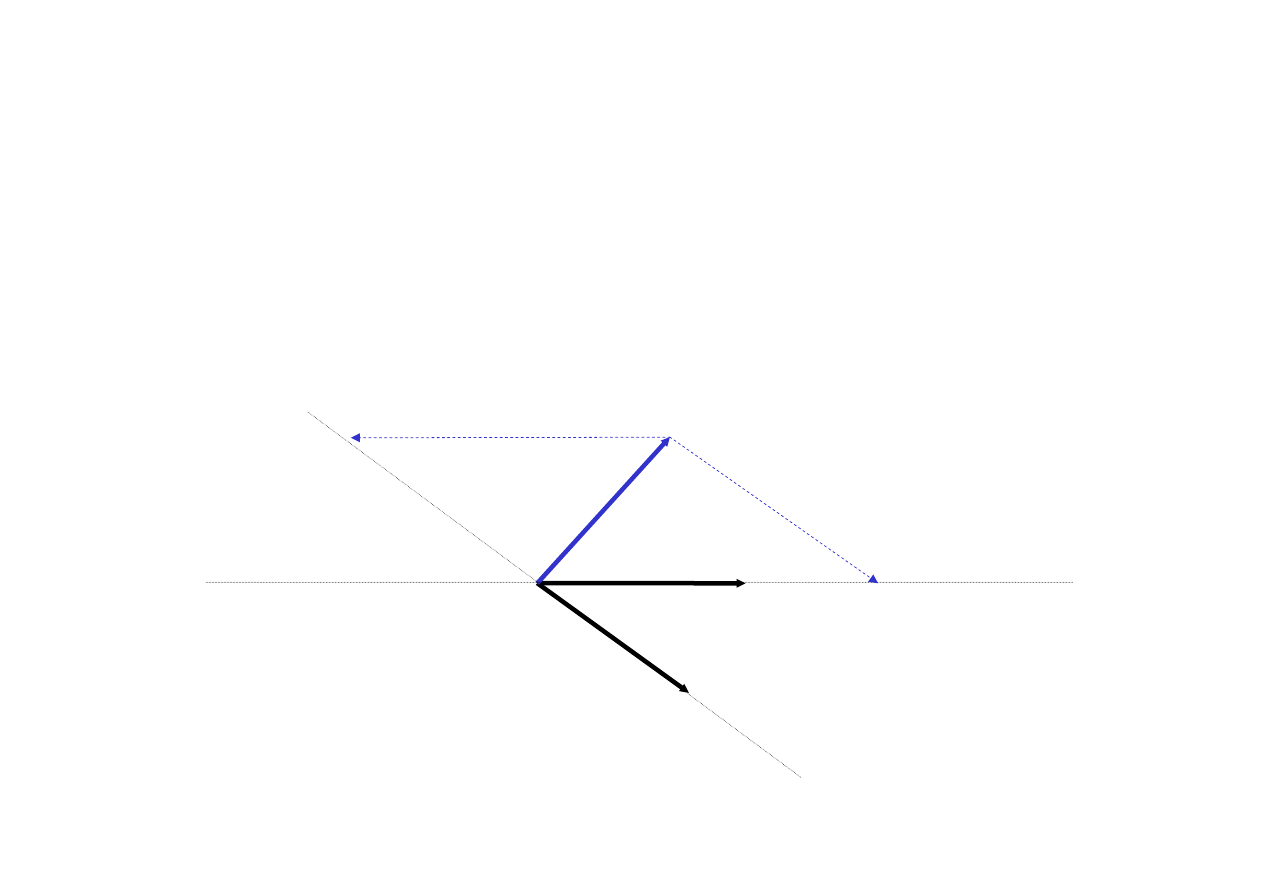
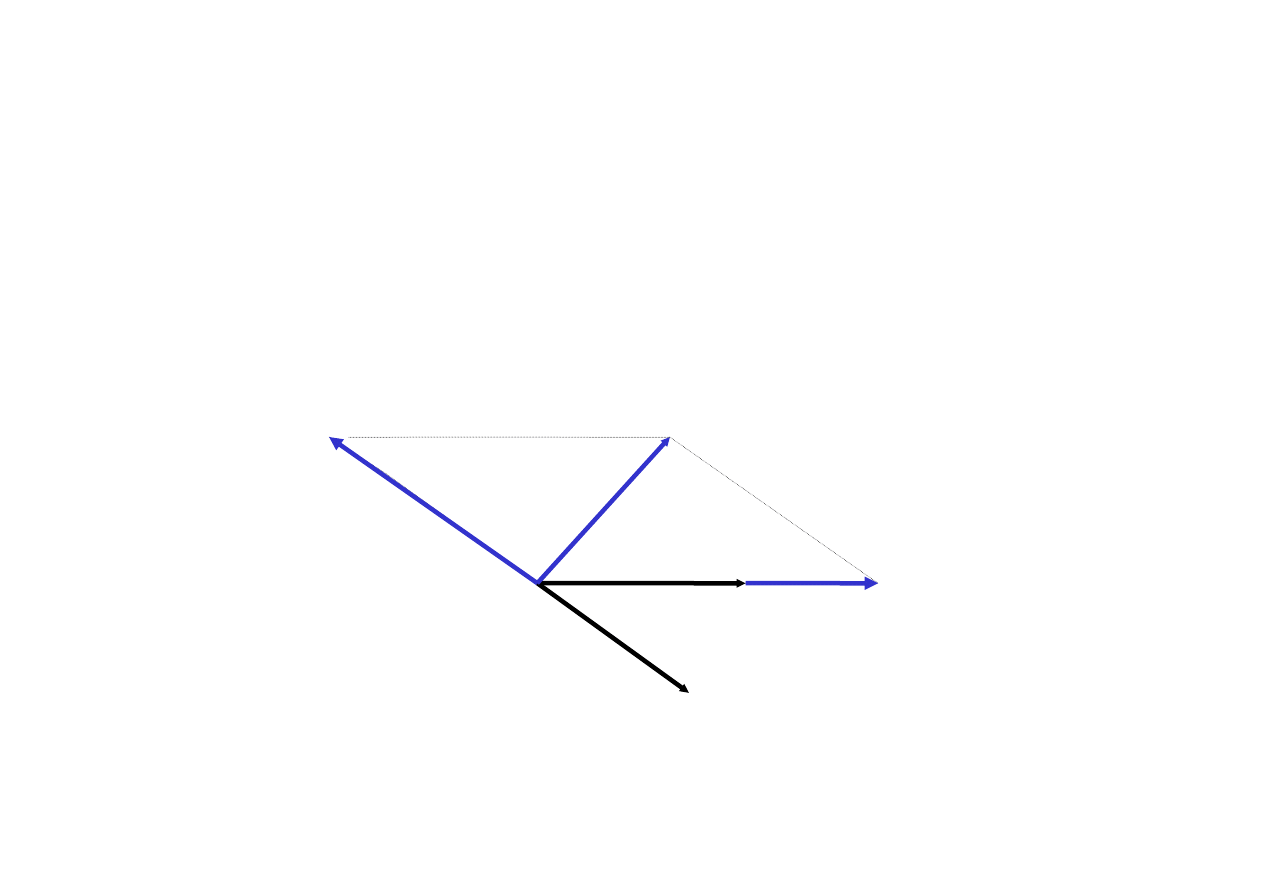
Dodawanie wektorów
a
b
a+b
a
b
a
b
a+b
lub
czyli długość sumy dwóch wektorów
a i b, tj. wektora (a+b) wynosi
(a+b)
2
= a
2
+b
2
– 2cos(a,b)
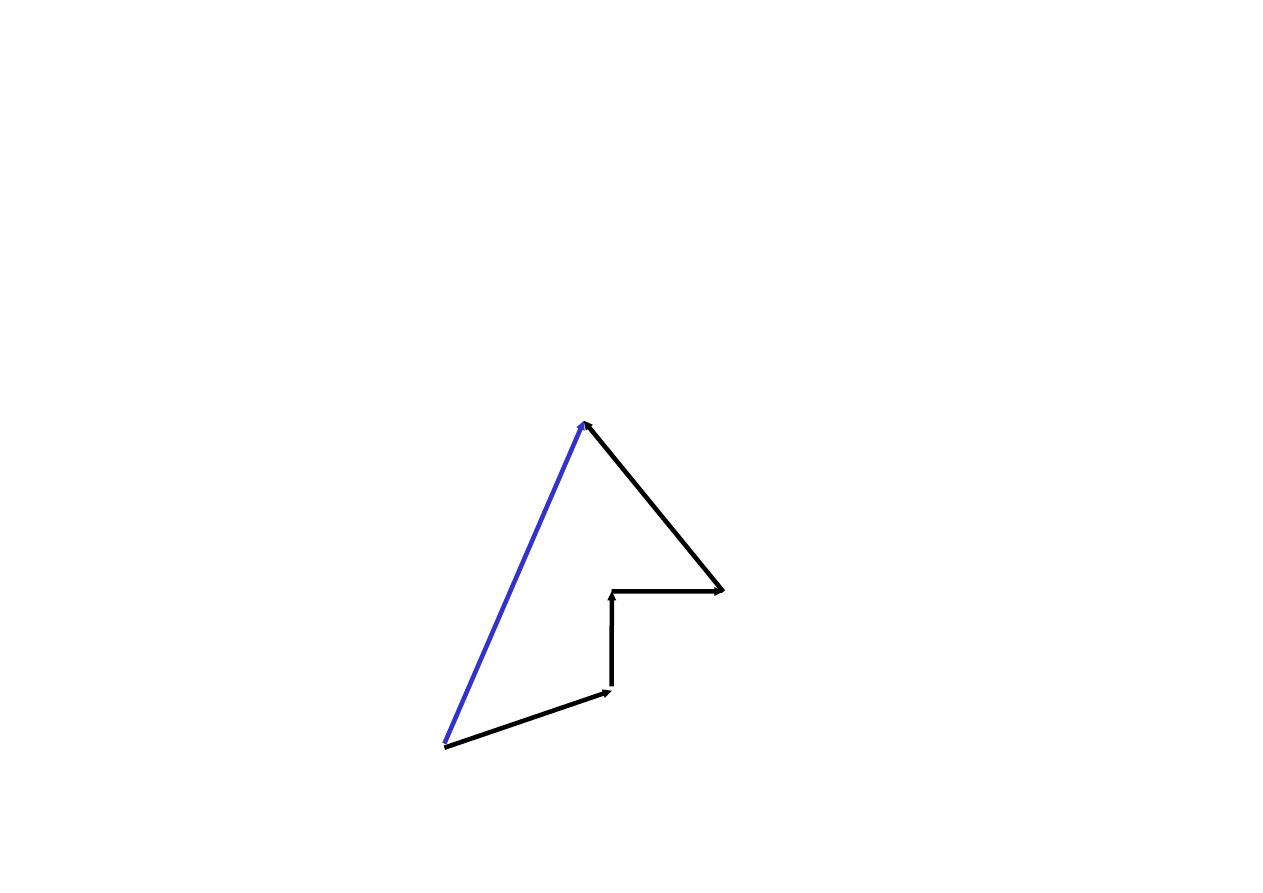
Operacje na wektorach
Dodawanie wielu wektorów
Σ
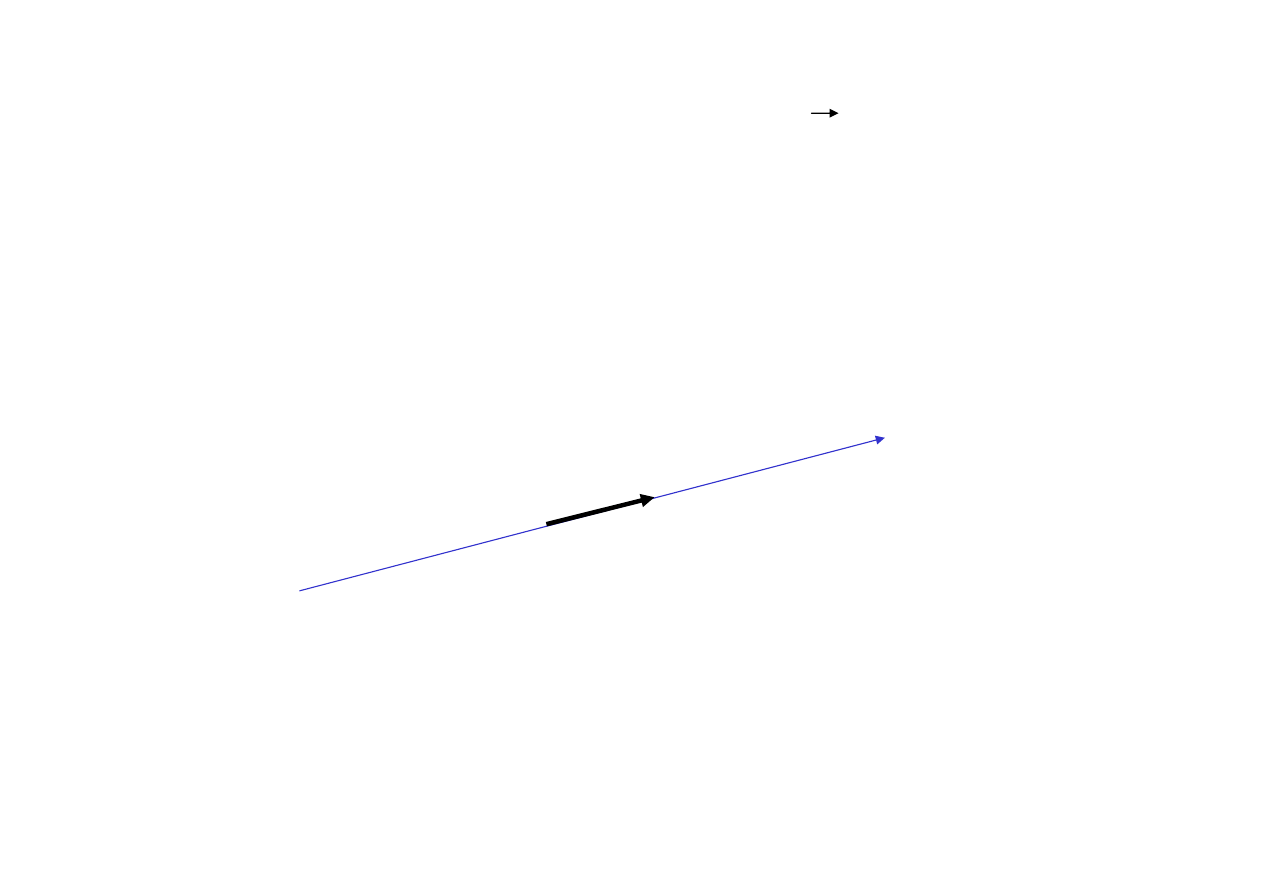
Mnożenie wektora r przez skalar k
= wektor p :
p= k r
kierunek i zwrot zachowane,
moduł (długość) zmieniona k-krotnie
Wersor e
a
wektora a (osi):
|e
a
| = e
a
= 1
a = a e
a
Odejmowanie wektorów
a - b = a + (- b)
e
a
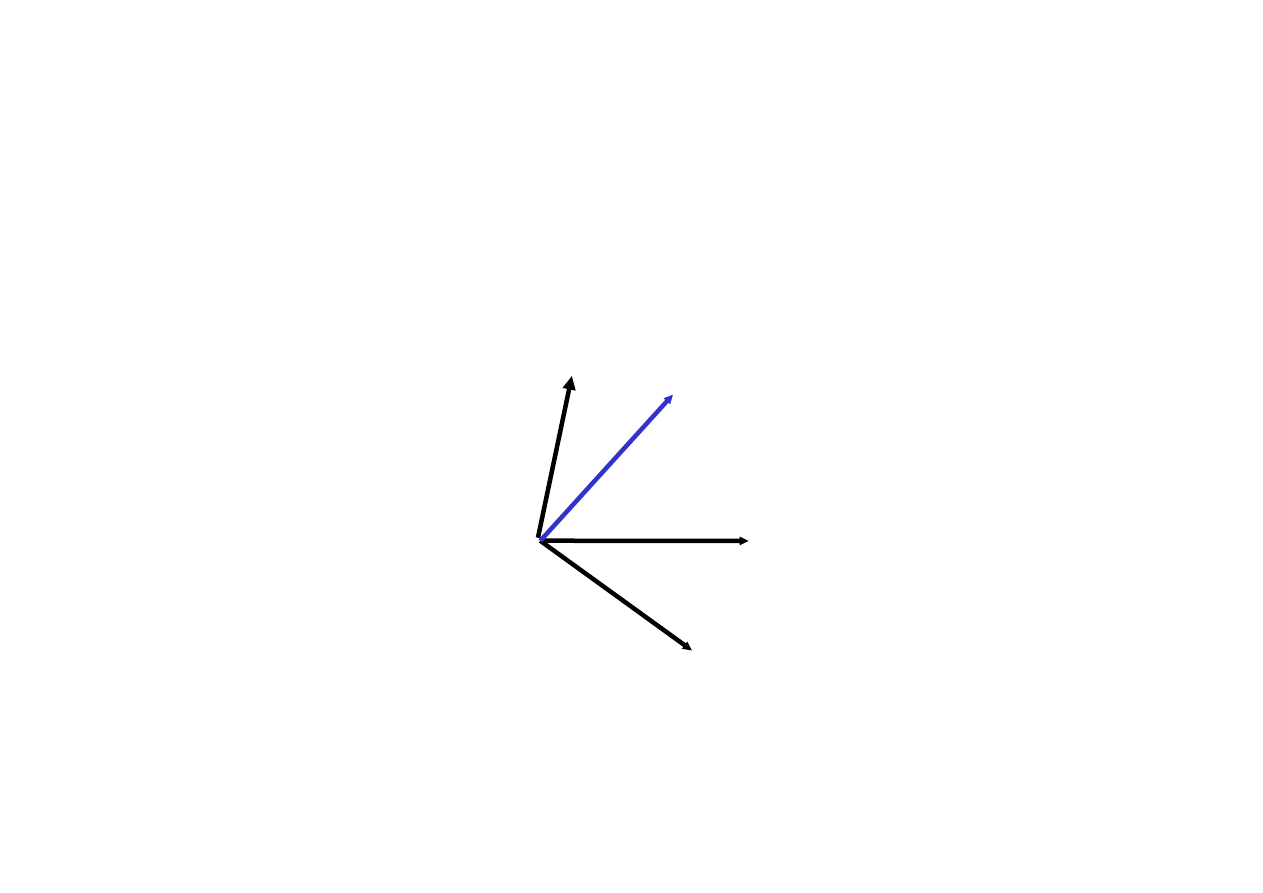
Liniowa zależność wektorów (niekolinearnych):
trzy dowolne wektory komplanarne a,b,c
spełniają zależność:
c= k a + p b,
c
a
b
Liniowa zależność wektorów (niekolinearnych):
trzy dowolne wektory komplanarne a,b,c
spełniają zależność:
c= k a + p b,
c
a
b
Liniowa zależność wektorów (niekolinearnych):
trzy dowolne wektory komplanarne a,b,c
spełniają zależność:
c= k a + p b,
c
a
b
pb
ka
k<0
Liniowa zależność wektorów (niekomplanarnych):
podobnie dowolny wektor d można wyrazić
za pomocą kombinacji liniowej trzech innych:
d = k a + p b + s c
c
a
b
d
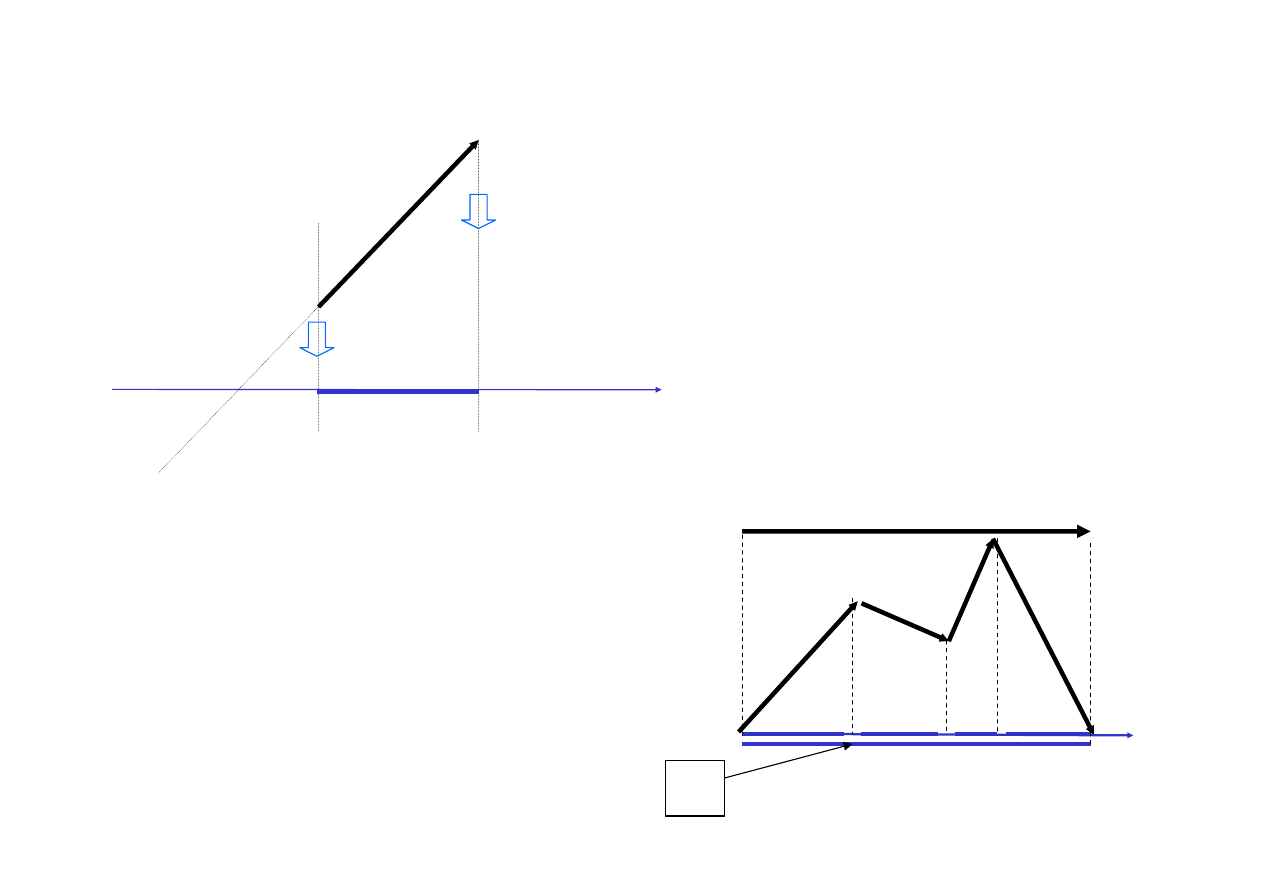
Rzut prostopadły
a
l
wektora
a na oś l
Rzut
b
l
sumy wektorów
b
l
= b
1l
+ b
2l
+b
3l
+....
b
1
b
1
a
l
a
l
ϕ
a
l
= a cos
ϕ
przy czym rzut ma znak (+)
gdy kąt |
ϕ
|<½
π
i znak (-) gdy |
ϕ
|>½
π
(jak cos
ϕ
)
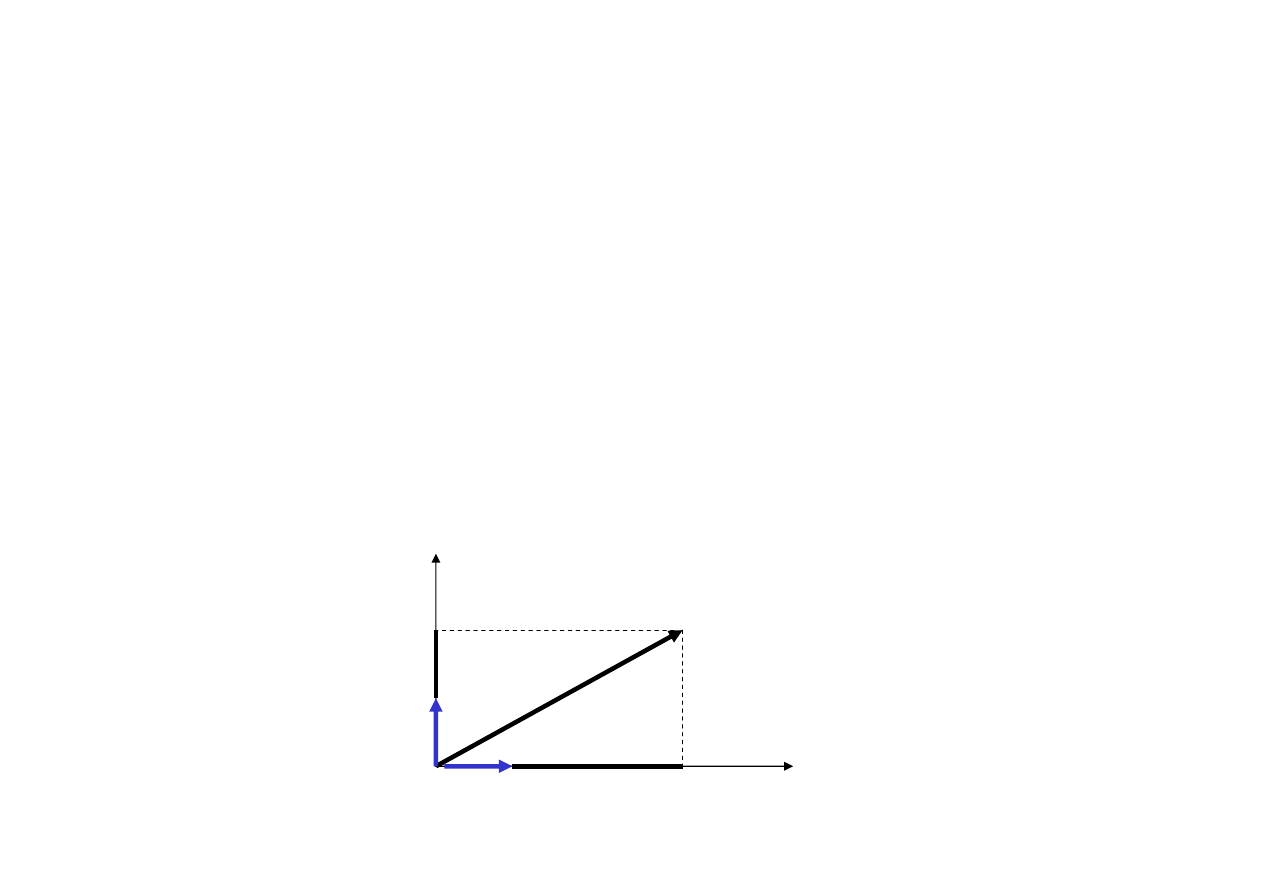
Osie układu prostokątnego (kartezjańskiego)
wersory
e
x
, e
y
, e
z
(baza)
dowolny wektor
a = a
x
e
x
+ a
y
e
y
+ a
z
e
z
,
rzuty prostopadłe - składowe wektora a
a
x
= x
,
a
y
= y
,
a
z
= z,
a
2
= x
2
+ y
2
+ z
2
y
x
e
y
e
x
a
x
a
y
a

Ponieważ rzut b
l
sumy wektorów
b
l
= b
1l
+ b
2l
+b
3l
+....
równa się sumie rzutów poszczególnych składowych,
to także dla składowych ortonormalnych (kartezjańskich):
jeśli
a = a
x
e
x
+ a
y
e
y
+ a
z
e
z
,
b = b
x
e
x
+ b
y
e
y
+ b
z
e
z
,
to
a+b = (
a
x
+
b
x
)
e
x
+ (a
y
+
b
y
)
e
y
+ (a
z
+
b
z
)
e
z

Iloczyn skalarny wektorów
a b = ab cos
ϕ
podobnie, w zapisie kartezjańskim
a b = a
x
b
x
+ a
y
b
y
+ a
z
b
z
= b a
skalar!
;
inv(obr)
[stąd np. długość |(a+b)|
2
= |a|
2
+ |b|
2
– 2ab]
Iloczyn wektorowy wektorów
a x b = (ab sin
ϕ) n ,
n - wersor normalny do a i b
a, b, n tworzą układ prawoskrętny
w zapisie kartezjańskim e
x
, e
y
, e
z
a x b = a
x ,
a
y ,
a
z
b
x
, b
y
, b
z
Uwaga:
a x b = - b x a
Pochodna wektora
a(t) = a
x
(t) e
x
+ a
y
(t) e
y
+ a
z
(t) e
z
:
da/dt = (da
x
/dt) e
x
+ (da
y
/dt) e
y
+ (da
z
/dt) e
z
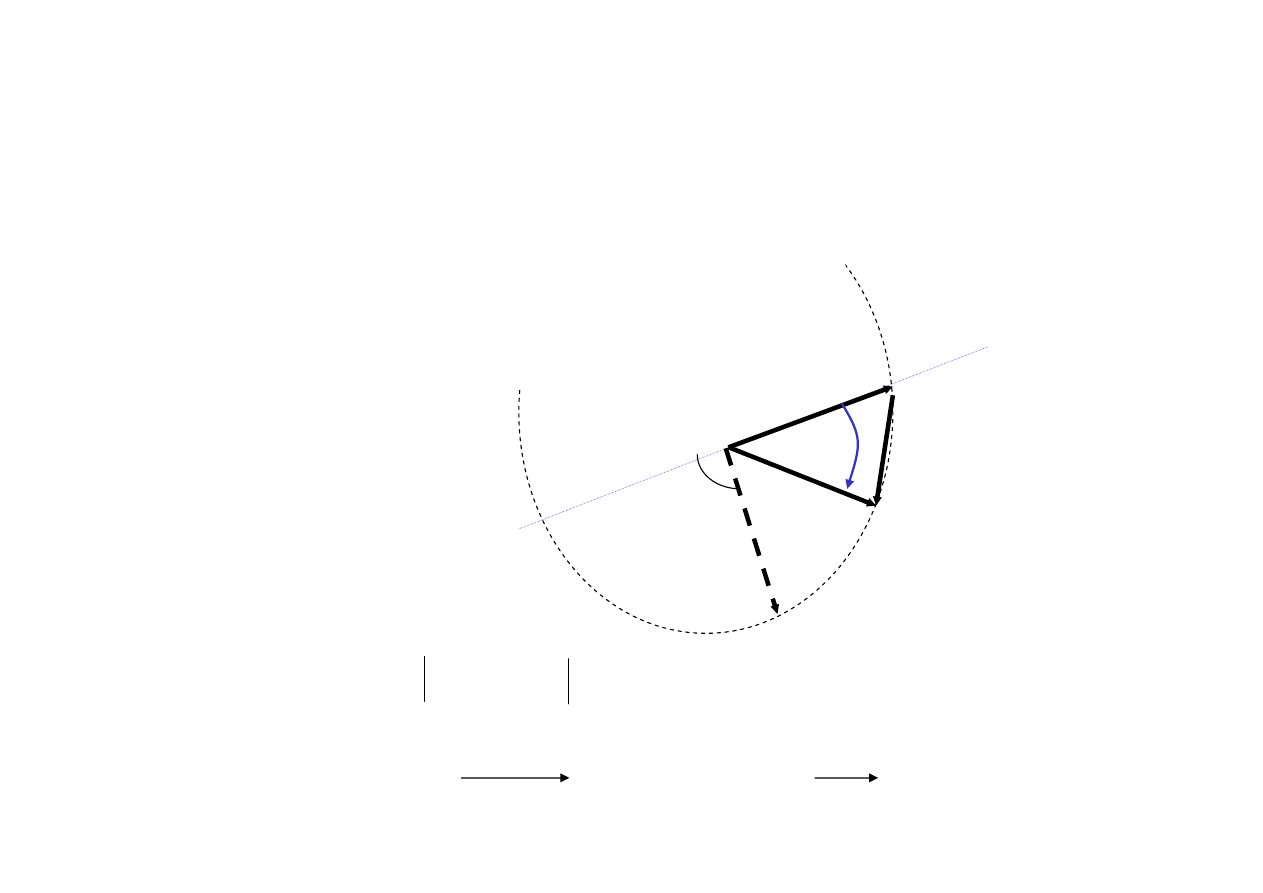
Pochodna wersora e
a
(t)
d{
e
a
(t
)} / dt
d {e
a
(t)} = d
ϕ
|e
a
(t)
|
= d
ϕ
1
d {
e
a
(t
)} / dt = (
d
ϕ/dt
)
e
⊥
(t)
e
a
(t)
e
a
(t+Δt)
Δ
e
a
(t)
e
⊥
(t)
Δϕ
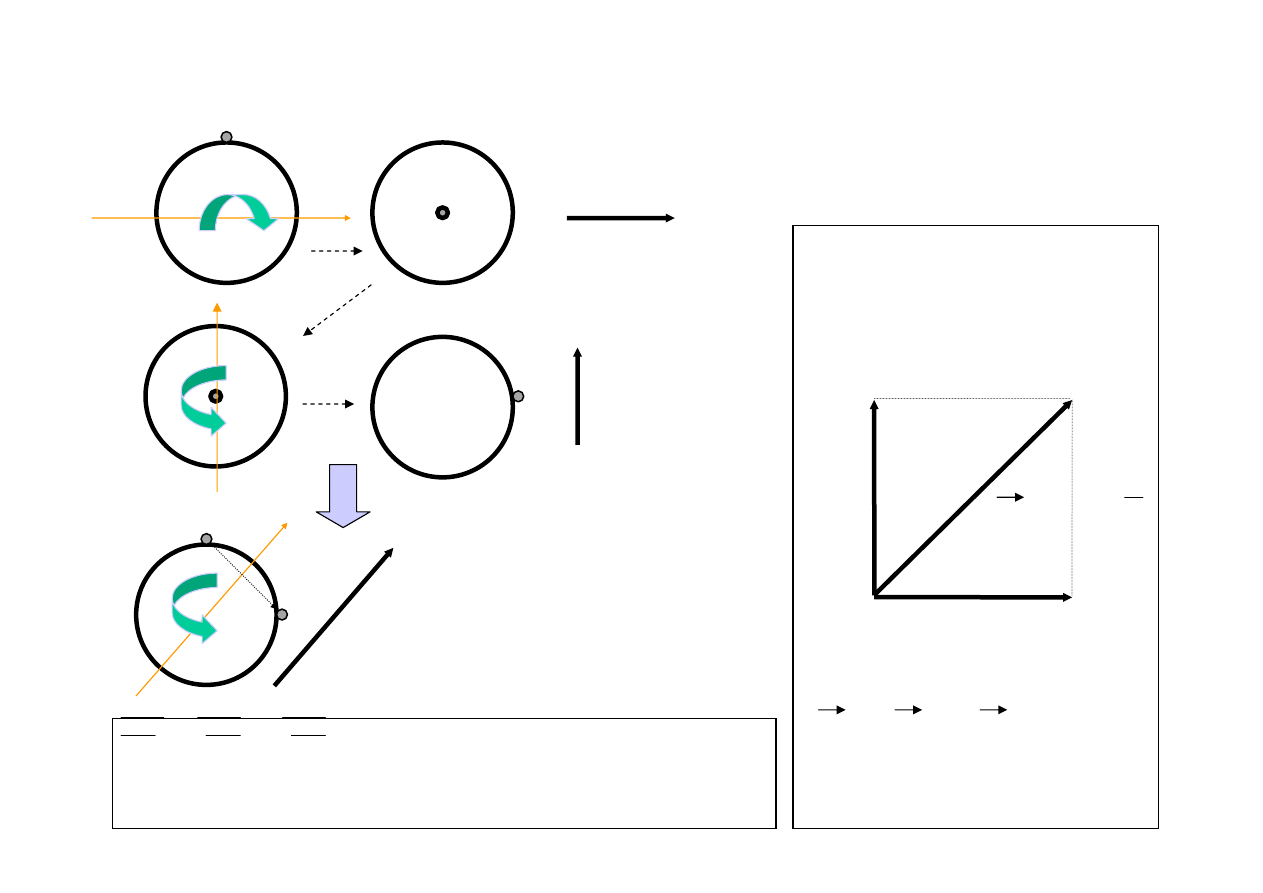
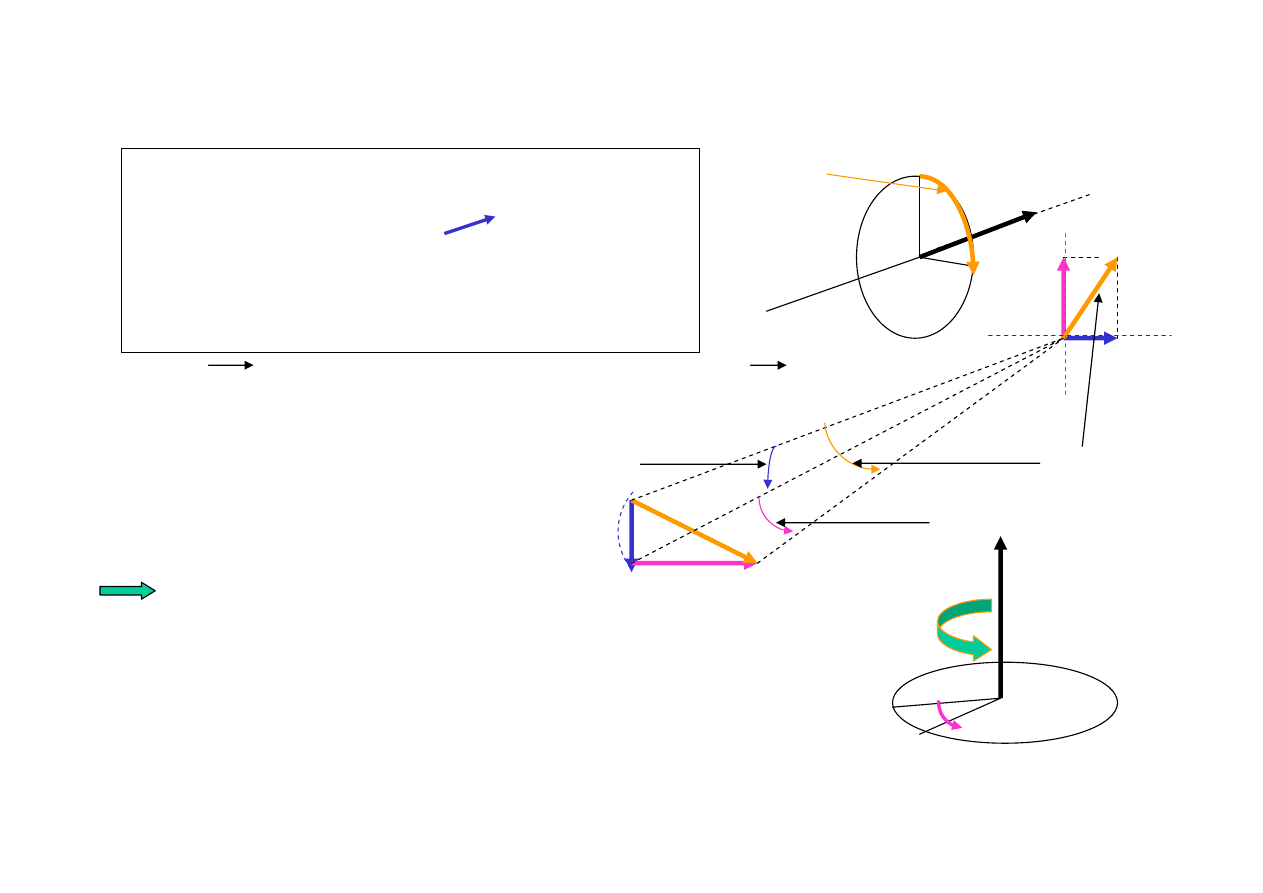
Obroty
ϕ
1
+
ϕ
2
=
ϕ
3
,
(kierunki jak dla wektorów
|
ϕ
1
|+|
ϕ
2
| = |
ϕ
3
|
(ale moduły:
π/2+π/2=π)
|
ϕ
1
|=
π/2
reprezentacja
|
ϕ
2
|=
π/2
|
ϕ
3
|=
π
π/2
π/2
|
ϕ
3
|=
π/√2
Dla wektorów,
z metody
równoległoboku :
ϕ
1
+
ϕ
2
=
ϕ
3
|
ϕ
1
|
2
+|
ϕ
2
|
2
= |
ϕ
3
|
2
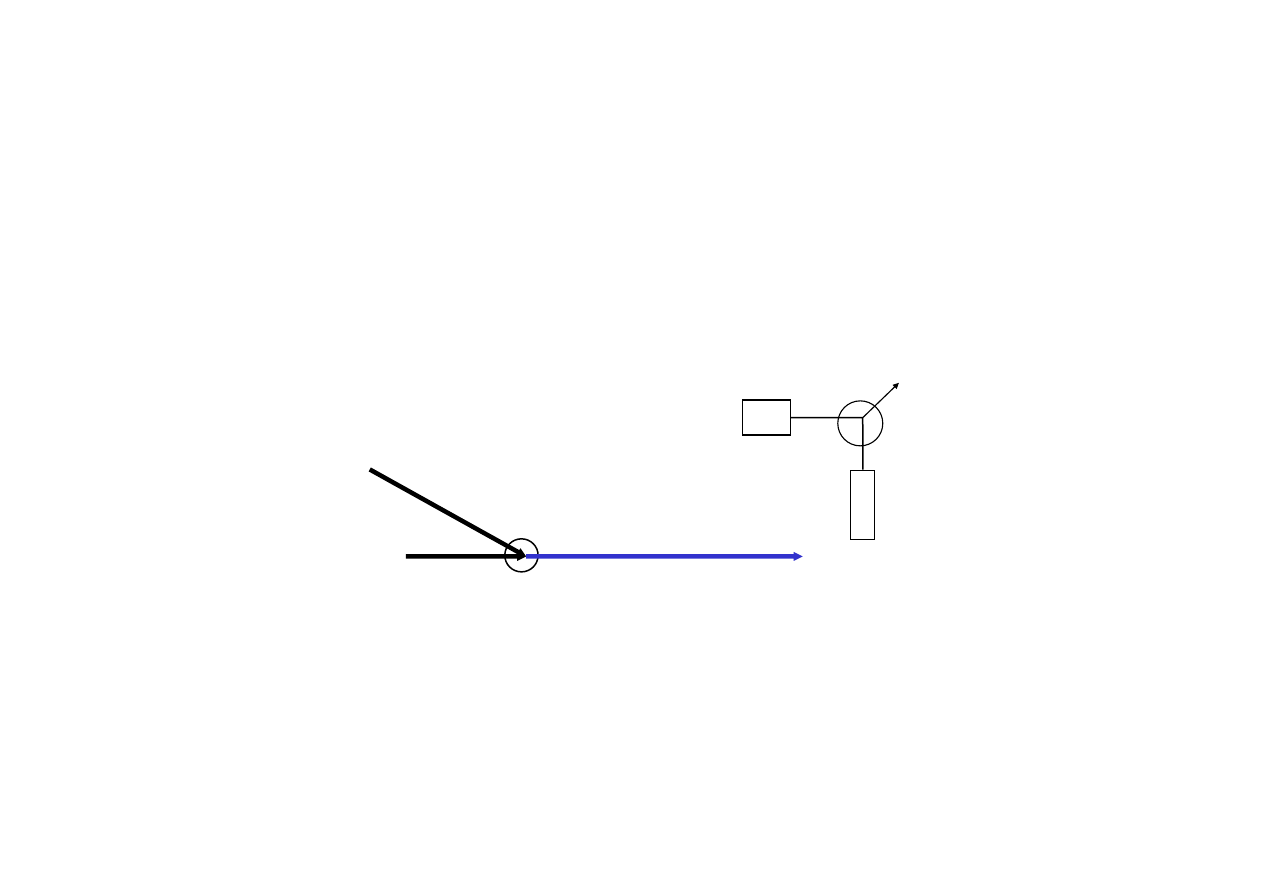
Nie-wektorowe
natężenie prądu I
–
wartość, kierunek i zwrot
węzeł
I
2
I
1
I
3
= I
1
+ I
2
R
1
R
2
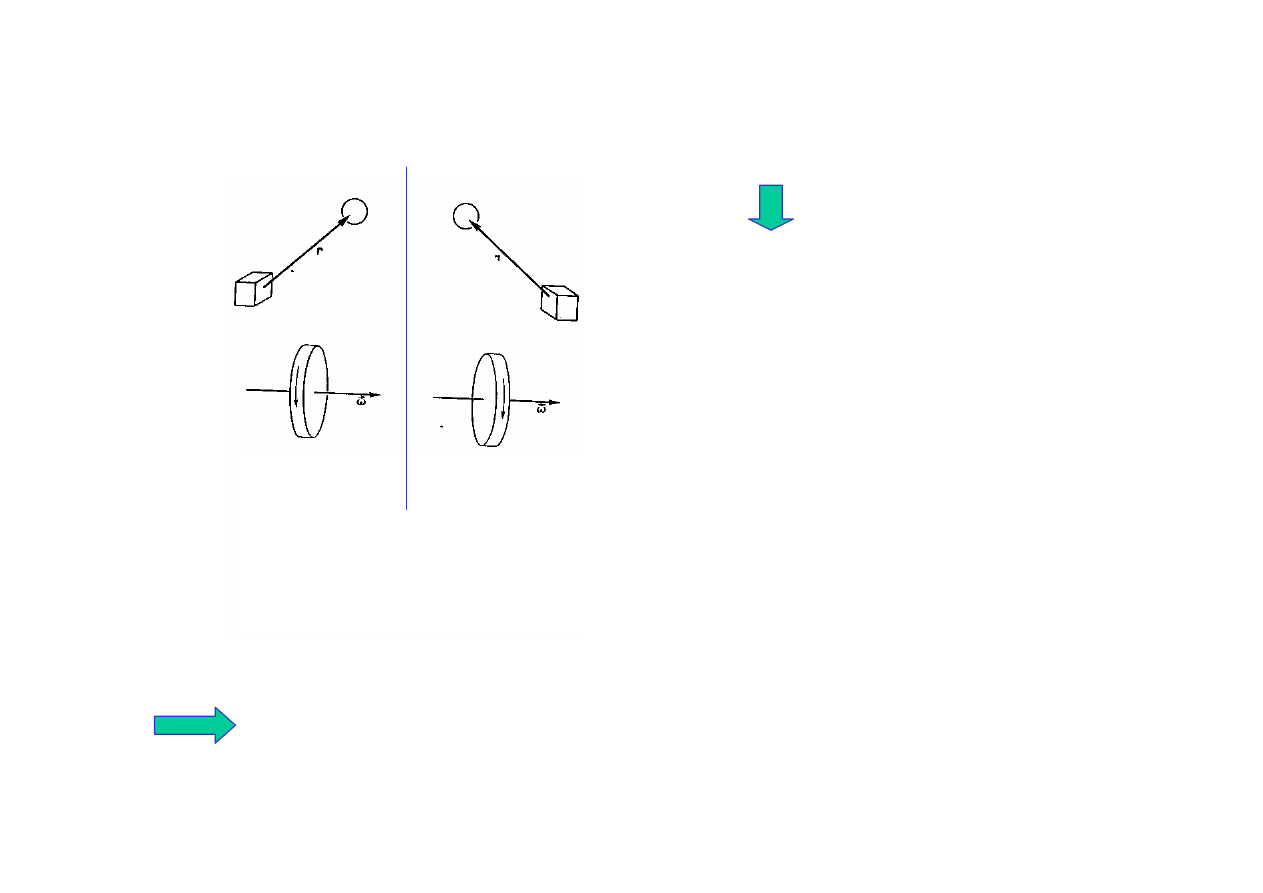
Wektory osiowe i biegunowe (pseudowektory)
wektory (biegunowe)
niezmiennicze
pseudowektory (wektory osiowe)
zmiana znaku (odwrócenie)
Iloczyn wektorowy wektorów biegunowych
z powodu
umownego wyboru skrętności układu (przestrzeni)
jest
wektorem osiowym
w operacji odbicia ulega odwróceniu (zmiana znaku)
odbicie zwierciadlane
Kinematyka punktu materialnego
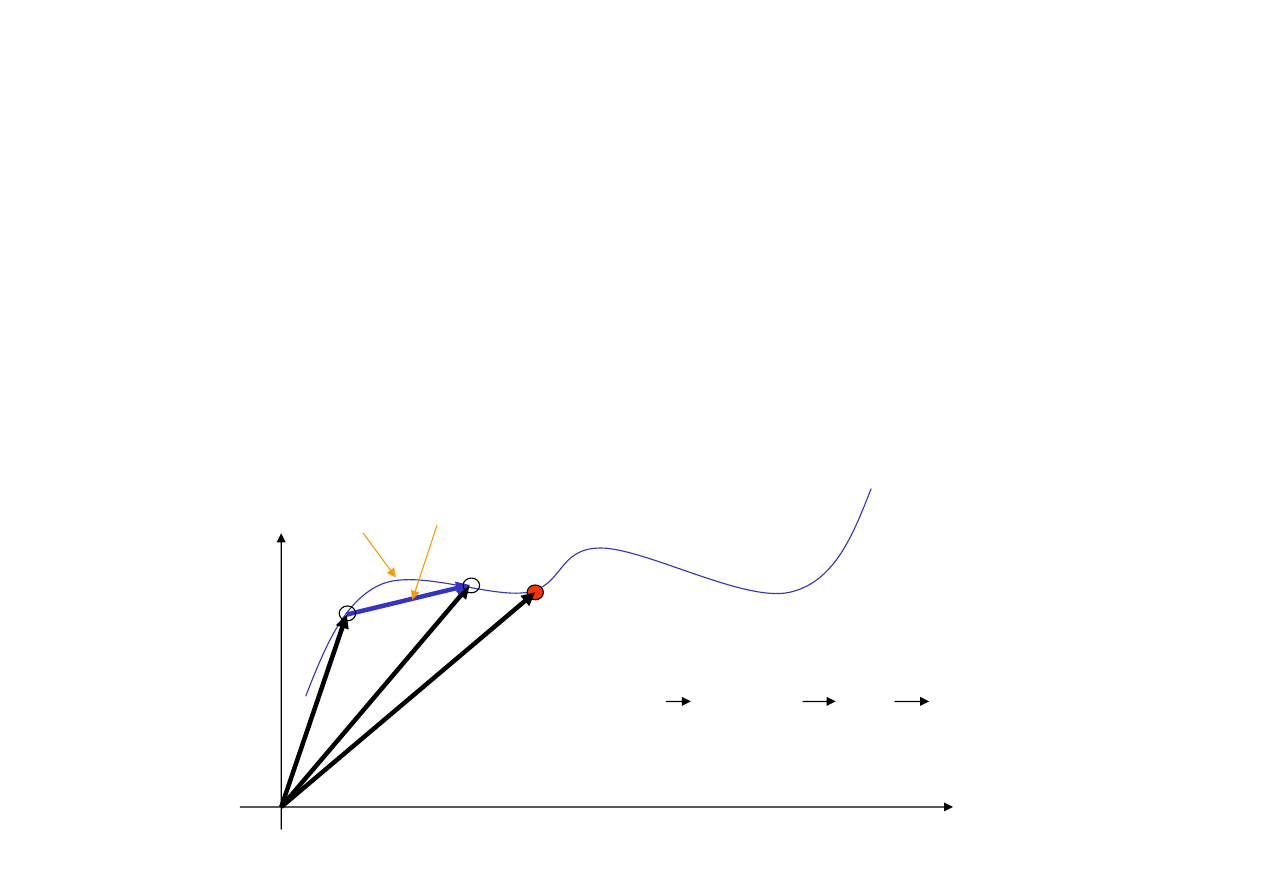
Pojęcia i definicje
Tor : linia, po której porusza się punkt materialny (zbiór geometryczny
punktów w których znajduje się poruszające się ciało – punkt - w
kolejnych czasach )
Droga s
12
- odległość między punktami 1,2 wzdłuż toru
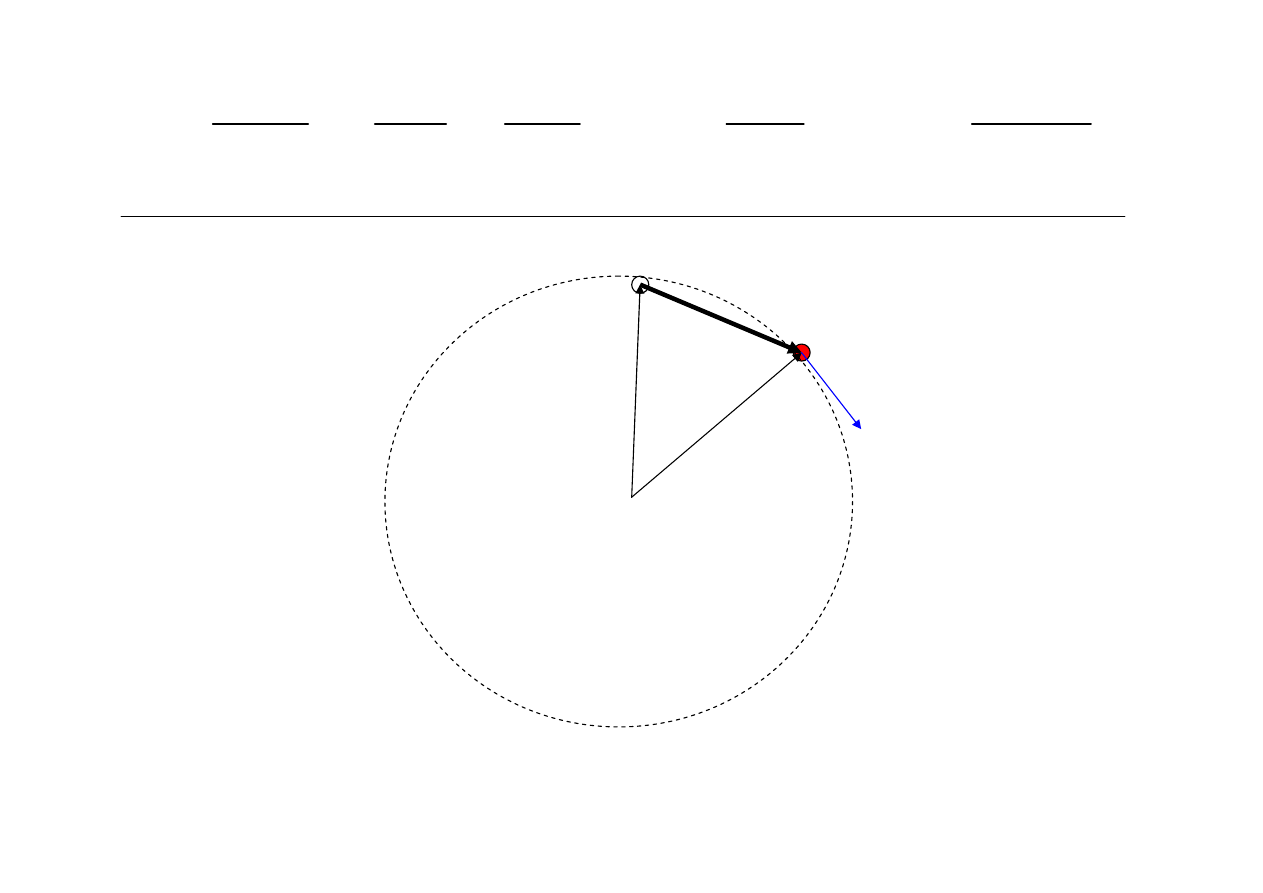
Przemieszczenie
Δr
12
: wektor o początku w punkcie 1 i końcu
w punkcie 2,
Δr
12
=
r
2
- r
1
dla
Δt
0,
Δs Δr ds=dr
s
12
Δr
12
y
x
r
1
r
2
1
2
3
r
3
Równanie toru w układzie odniesienia (Oxyz) to
wzajemny,
niezależny od czasu
związek współrzędnych
przestrzennych :
f (x,y,z) = F
Równanie ruchu: zależność czasowa położenia ciała,
np. promień wodzący jako funkcja czasu - r(t) (w układzie Oxyz):
r(t) = r
x
(t) e
x
+ r
y
(t) e
y
+ r
z
(t) e
z
,
lub w postaci parametrycznej:
x
p
= x(t)
y
p
= y(t)
z
p
= z(t)
Parametry ruchu:
prędkość
(szybkość) v = |v| = |dr/dt| = |dr|/dt = ds/dt
(
v
≠ s/t !
)
w układzie Oxyz :
v = v
x
e
x
+ v
y
e
y
+ v
z
e
z
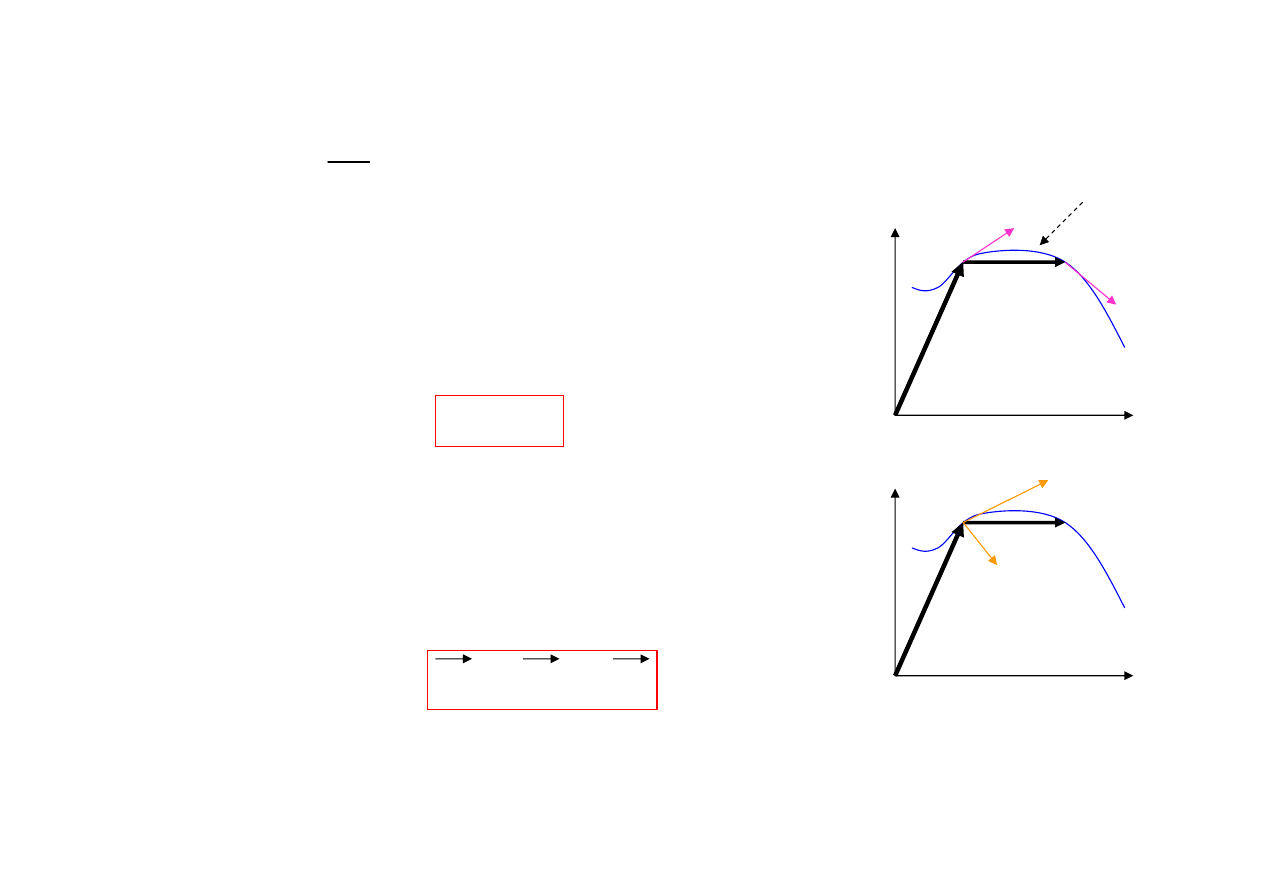
w odniesieniu do toru: v = v
τ
przyspieszenie
a = dv/dt = dr
2
/dt
2
w układzie Oxyz : a = a
x
e
x
+ a
y
e
y
+ a
z
e
z
w odniesieniu do toru a = a
τ
τ + a
n
n
a
τ
= dv/dt,
a
n
= v
2
/
ρ
τ
r(t)
dr
ds
r(t)
a
n
a
t
dr
dt
r
d
v
r
r =
s
Δr
|v|
v
≠ s/t !
n
dt
s
d
v
a
n
dt
d
v
a
dt
d
v
dt
v
d
dt
v
d
a
t
t
r
r
r
r
r
r
r
r
)
/
(
)
(
)
(
)
(
)
(
ρ
τ
ϕ
τ
τ
τ
τ
+
+
+
=
+
=
=
s
Δr
r
s
Δr
r
s
Δr
r
s
Δr
r
v = |dr|/dt
ale
v
≠ s/t !
v
≠ Δr /t !
Relacje odwrotne
t
2
t
2
Δr
12
=
∫ v(t) dt,
s
12
=
∫ v(t) dt,
t
1
t
1
v
śr
=
<v> = s
12
/t
12
ale nie
:
∫
−
=
2
1
)
(
1
1
2
t
t
śr
dt
t
v
t
t
v
∫
=
2
1
)
(
)
(
t
t
dt
t
a
t
v
r
r
n
v
v
v
v
n
śr
....
2
1
+
+
≠
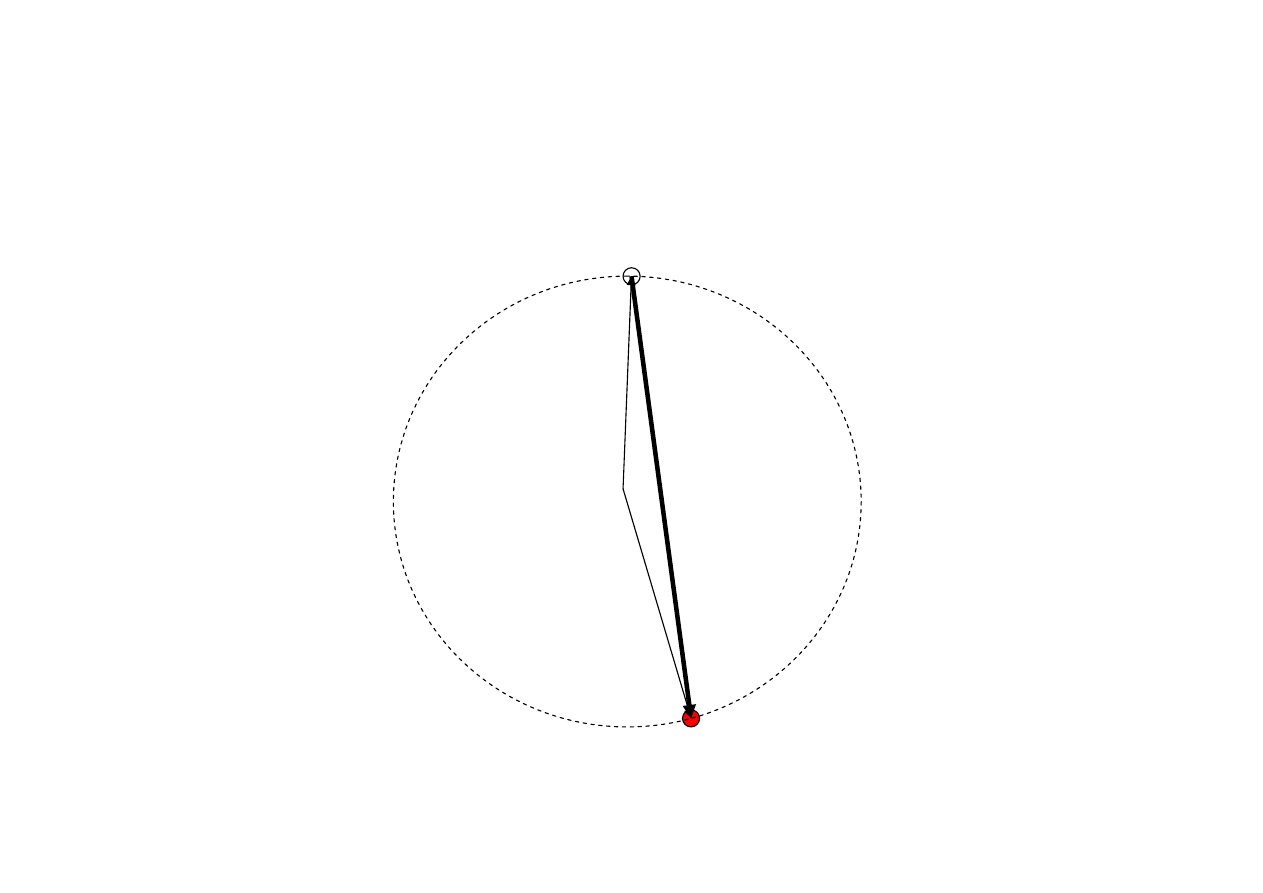
Parametry ruchu obrotowego
W ruchu obrotowym każdy punkt ciała porusza się po okręgu
Definicja
drogi kątowej
ϕ:
ϕ = s/r;
więc droga liniowa
s = r
ϕ
Porównanie parametrów ruchu liniowego i obrotowego
droga: s =
ϕ
r, prędkość: v =
ω
r, przyspieszenie: a
t
=
α
r
związki skalarne !
droga kątowa
ϕ
Tor
droga s
prędkość kątowa
ω = d
ϕ
/dt
ω = (1/r)
ds/dt
= (1/r)
v =
Przyspieszenie kątowe
α = dω/dt = (1/r)
dv/dt
α = (1/r)
a
t
=
r
v
r
a
t
r
v
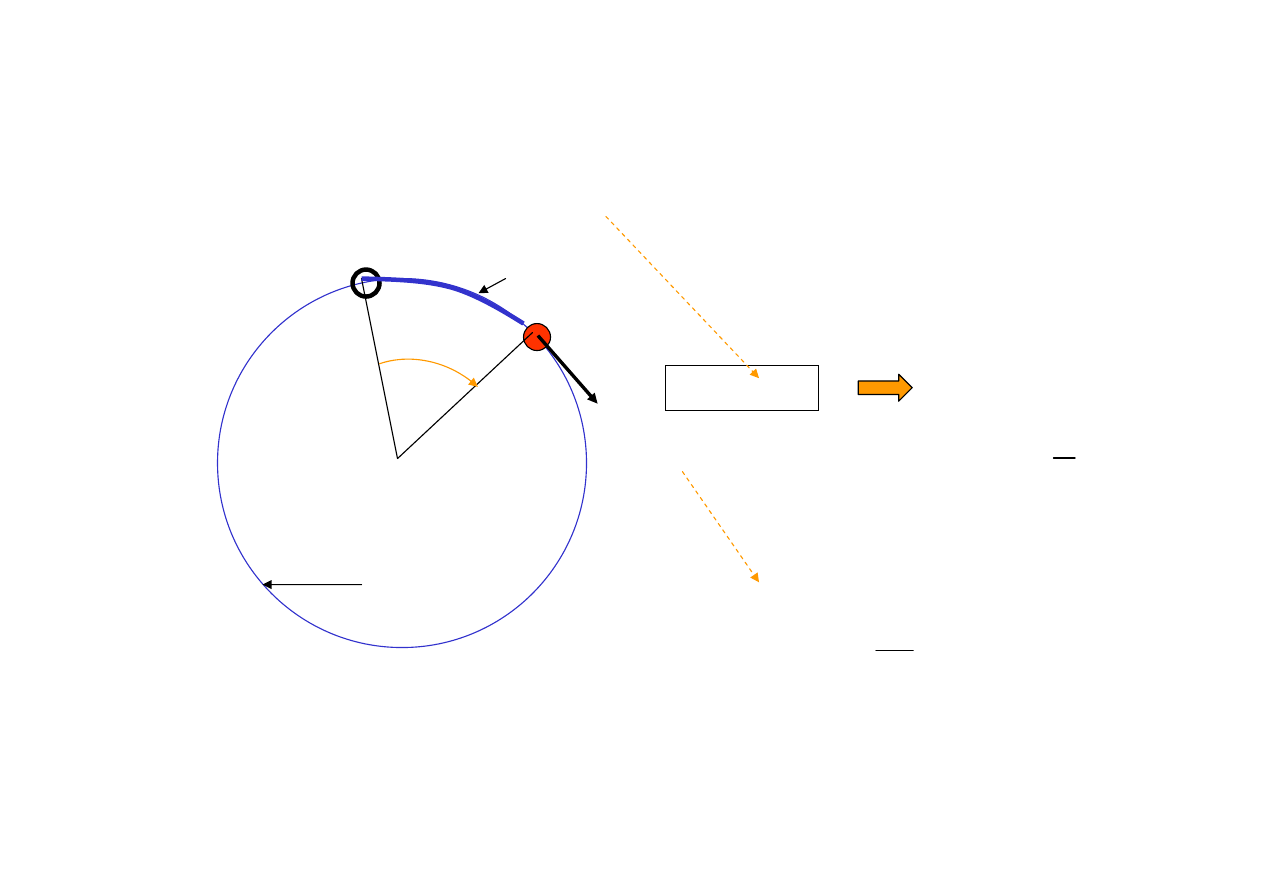
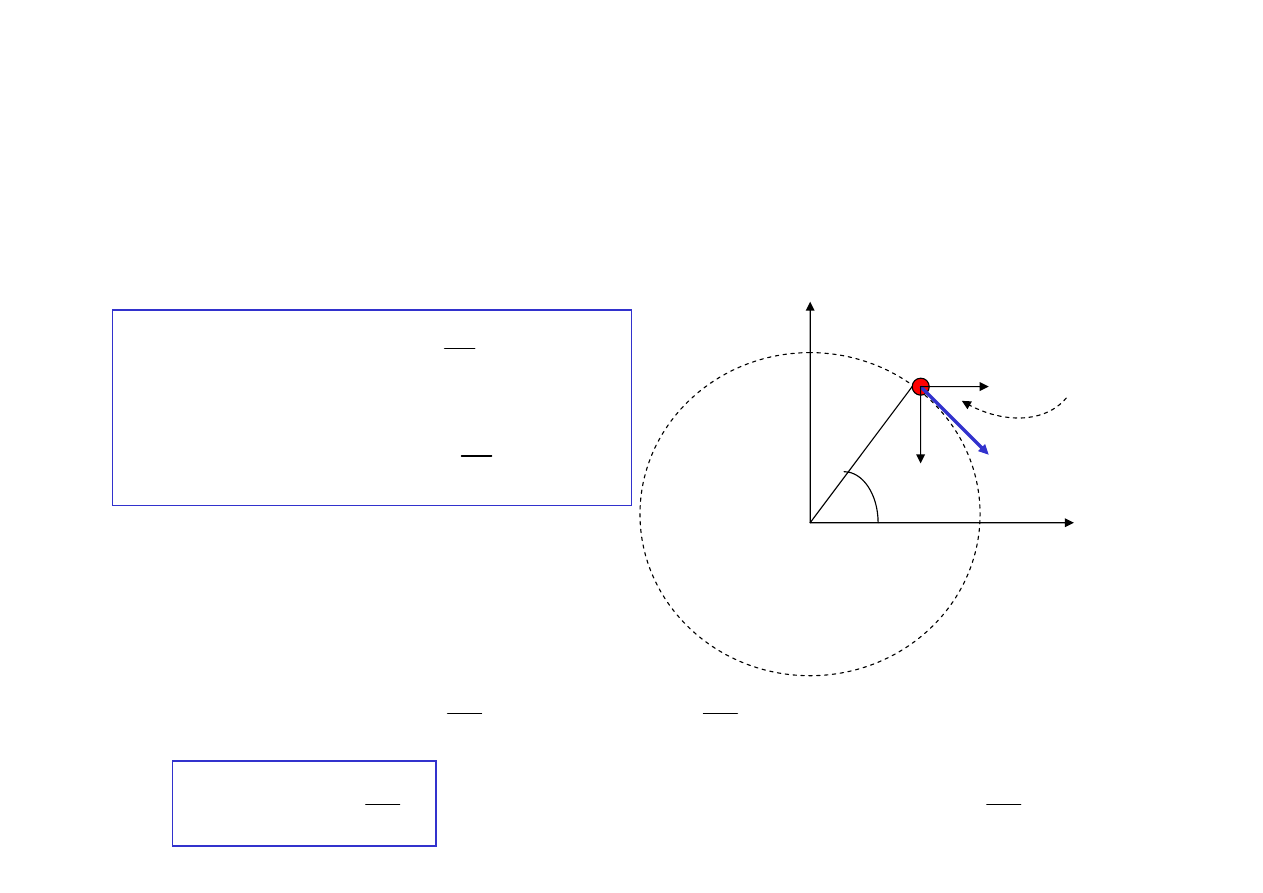
Przykład:
Ciało, porusza się po okręgu o promieniu
R
ze stałą prędkością
o wartości v = v
t
tj. ruchem jednostajnym po okręgu.
Opisać ten ruch.
Przyjąć dane: R= 0,5 m, v
t
= 5 m/s
v
t
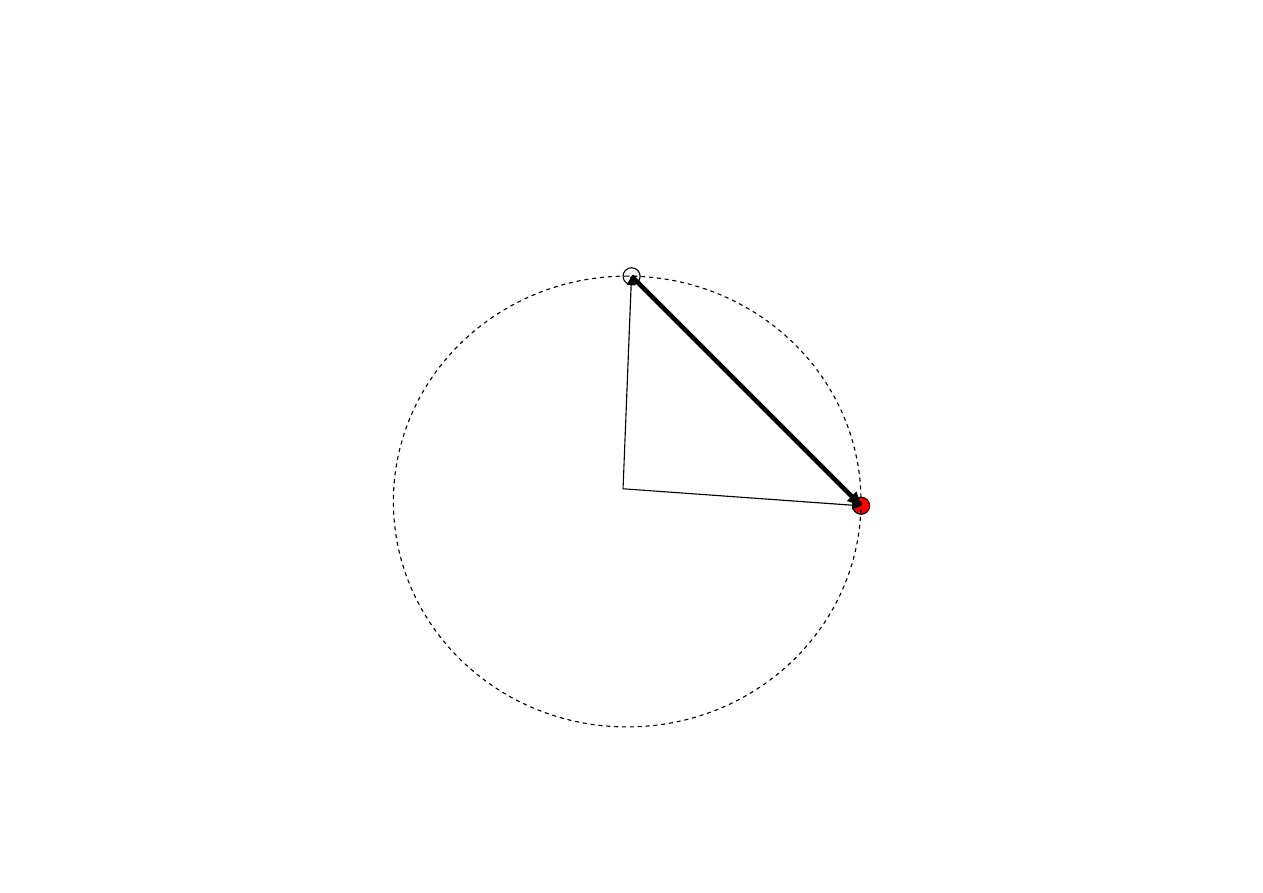
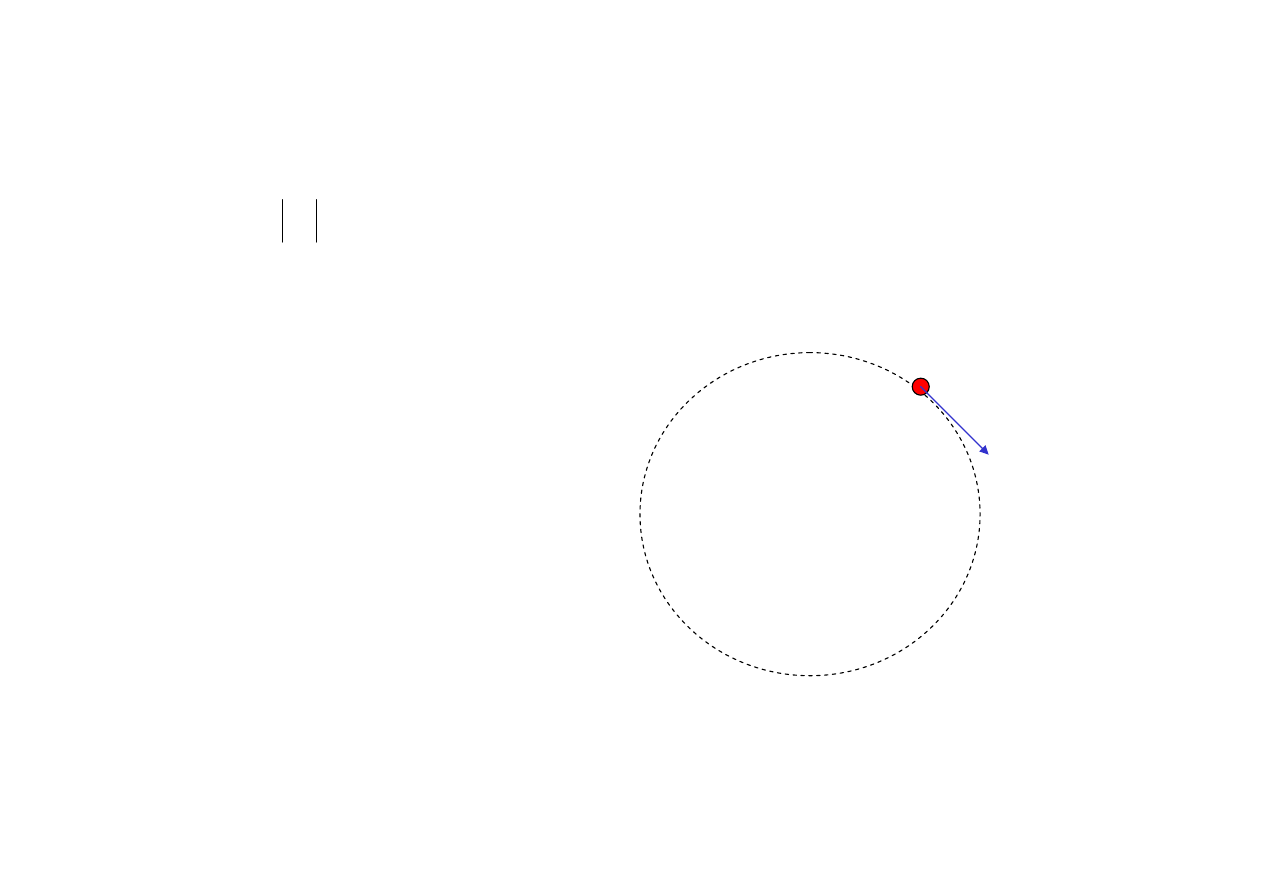
Przykład:
Równanie ruchu
r(t) = x(t) e
x
+ y(t) e
y
x(t) = ?
y(t) = ?
x
y
v
t
v
x
v
y
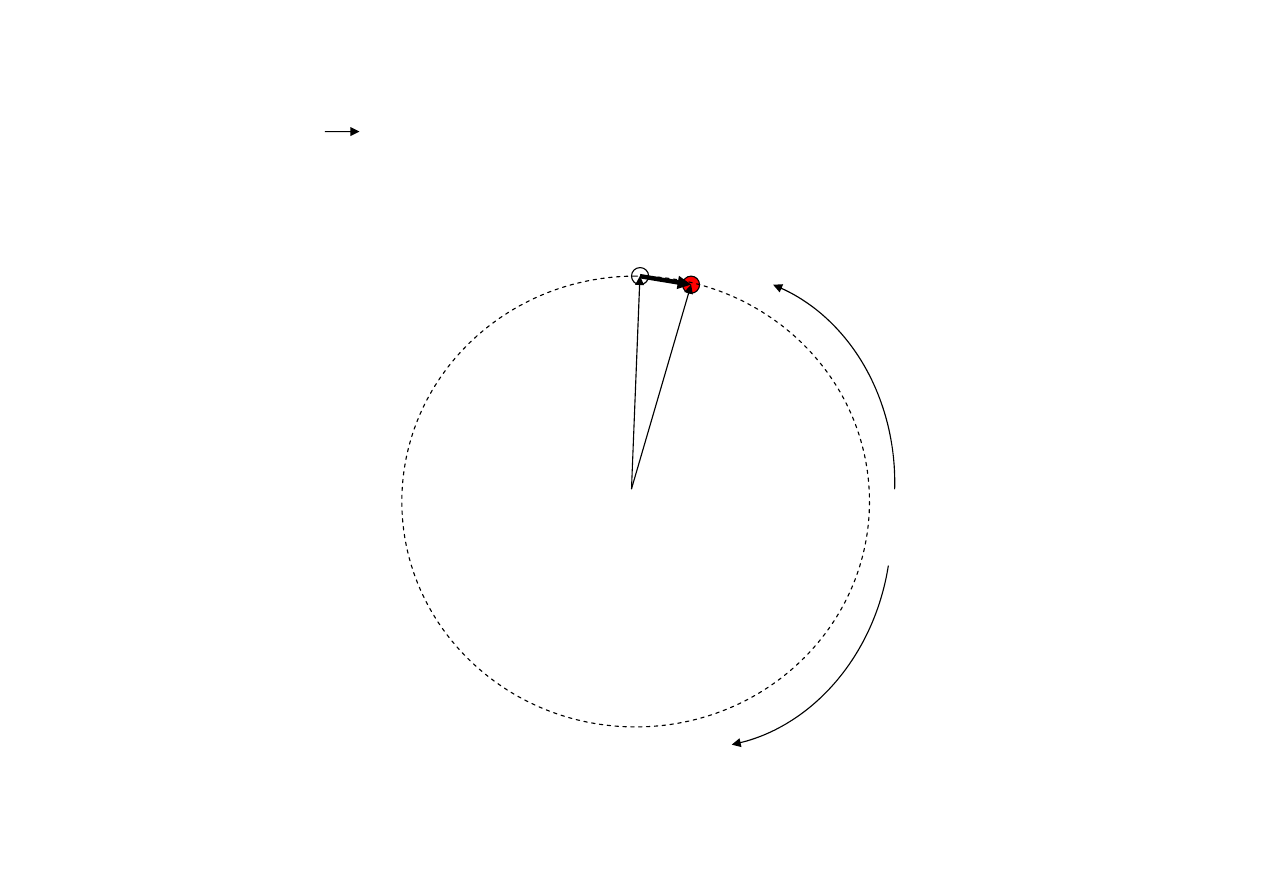
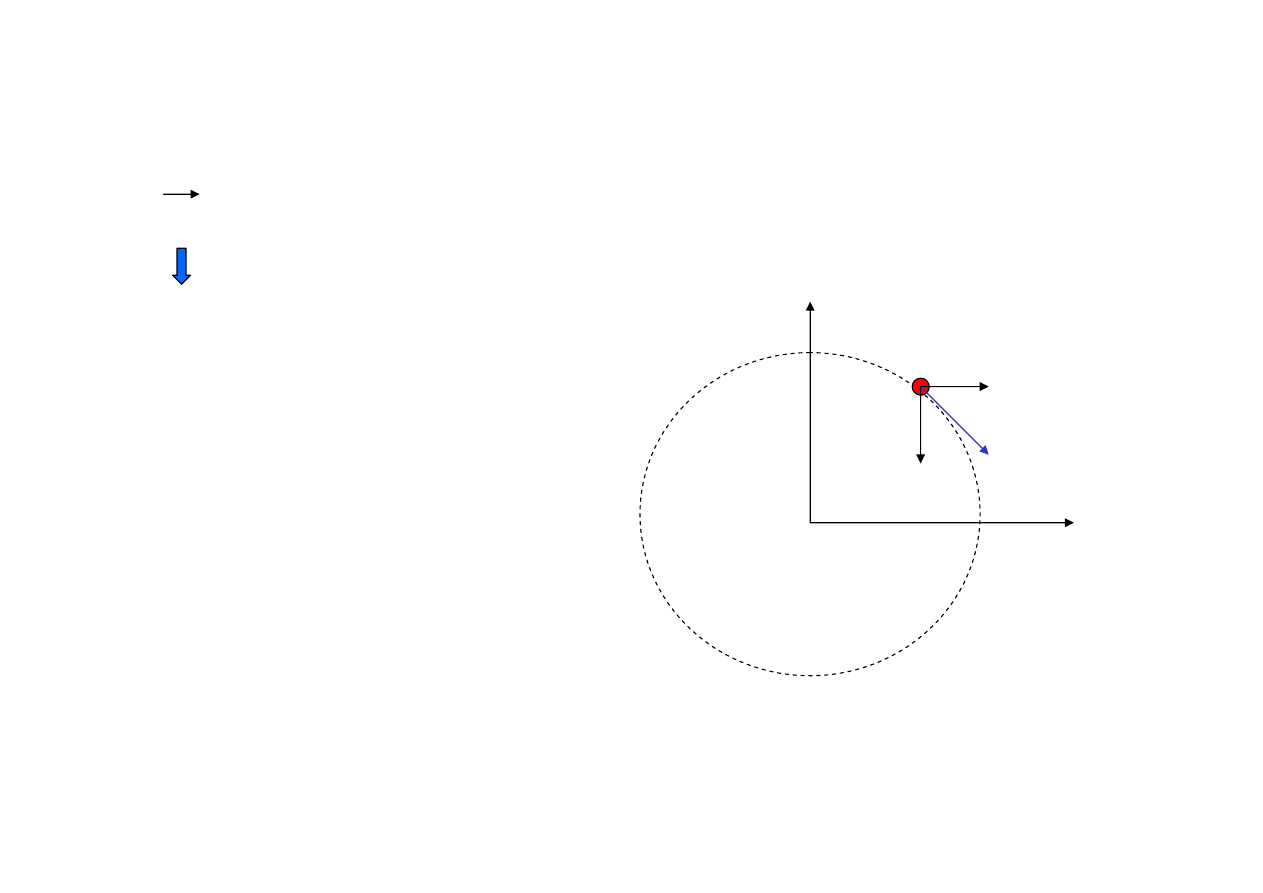
Przykład:
Szukamy: równanie ruchu
x(t) = ?
y(t) = ?
dane:
v
x
= v
t
cos
ϕ
v
y
= v
t
sin
ϕ
ϕ = ω t , ω=const
v
x
(t) = v
t
cos (
ω t)
v
y
(t) = v
t
sin (
ω t)
x
y
v
t
v
x
v
y
ϕ
ϕ
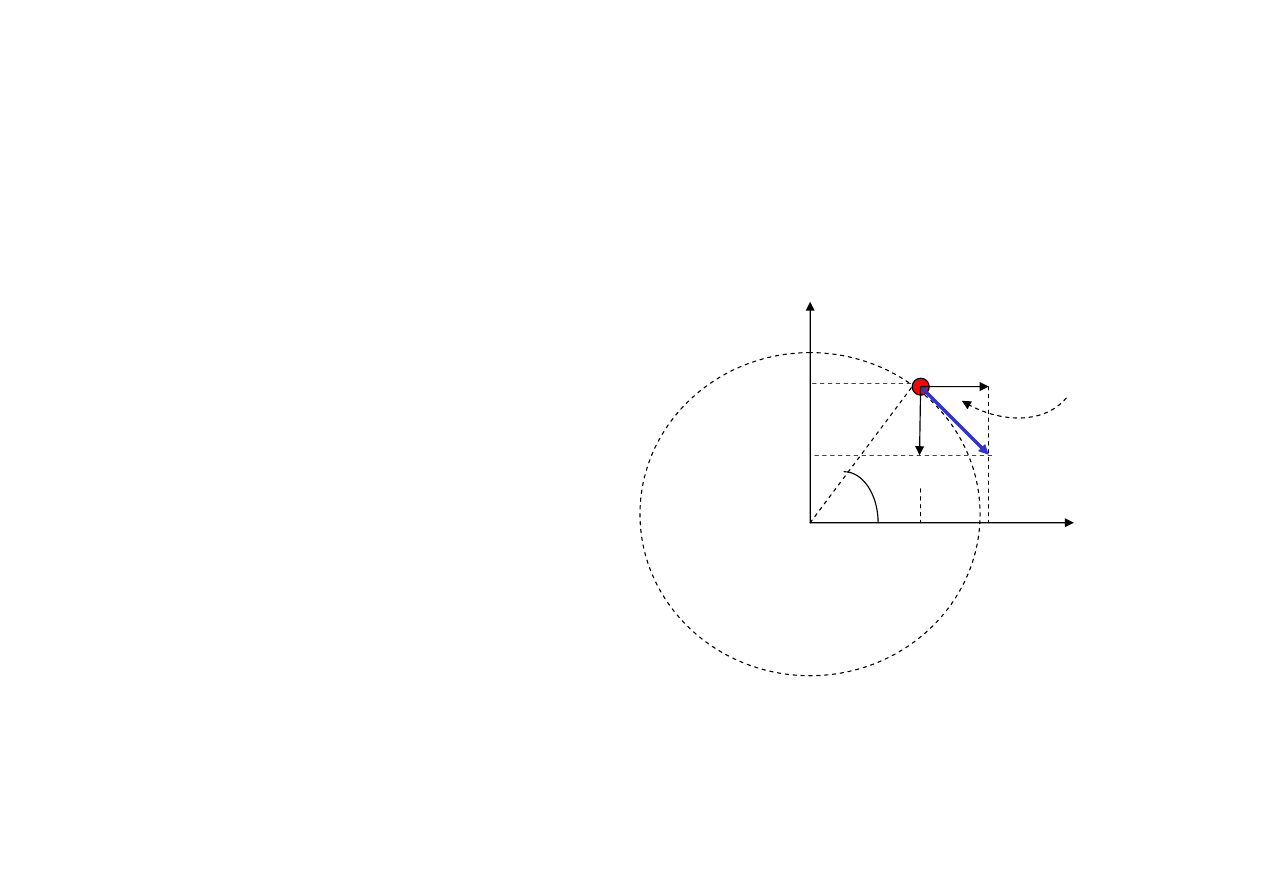
Przykład:
Równanie ruchu
(
ω
=const)
Równanie toru
:
(eliminacja czasu z równania ruchu)
x
y
v
t
v
x
v
y
ϕ
ϕ
t
v
dt
t
v
t
y
t
v
dt
t
v
t
x
dt
v
t
y
dt
v
t
x
dt
t
v
t
s
t
t
t
t
t
t
t
y
t
x
t
t
ω
ω
ω
ω
ω
ω
cos
)
sin(
)
(
,
sin
)
cos(
)
(
)
(
,......
)
(
)
(
)
(
2
1
=
−
=
=
=
=
=
⇒
=
∫
∫
∫
∫
∫
ω
ω
ω
ω
ω
ω
t
t
t
t
v
R
promieniu
o
okr
równanie
v
y
x
t
v
t
v
t
y
t
x
=
⇒
=
+
+
=
+
.
.
.
.
)
(
)
(
cos
)
(
)
(
sin
)
(
)
(
)
(
2
2
2
2
2
2
2
2
2
Wielkości wektorowe ruchu obrotowego
Droga kątowa (kąt obrotu)
ϕ=s/r
reprezentacja kąta
ϕ
:
(o długości
odpowiadającej łukowi
s
i zwrocie osi)
nie jest wektorem
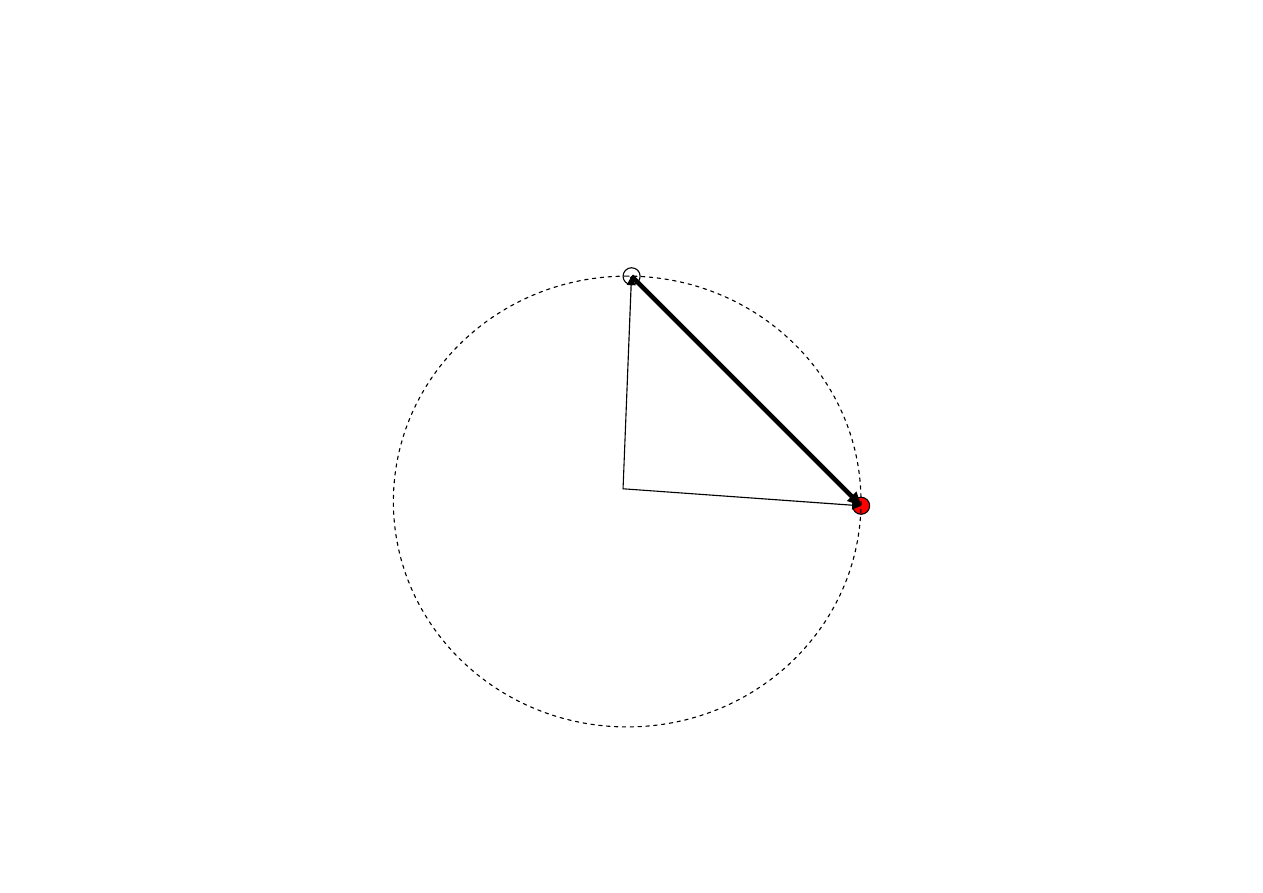
Jednak d
ϕ (o długości odp. przemieszczeniu dr)
jest wielkością wektorową
bo |d
ϕ| = ds/r = |dr|/r
oraz |
dr
3
|
2
= |
dr
1
|
2
+|
dr
2
|
2
|
d
ϕ
3
|
2
=|
d
ϕ
1
|
2
+|
d
ϕ
2
|
2
Zatem prędkość kątowa
ω = dϕ/dt
jest wektorem
skierowanym wzdłuż osi obrotu
oraz przyspieszenie kątowe
α = dω/dt
jest wektorem
|
ϕ|=
s
/r
ϕ
d
ϕ
1
d
ϕ
2
dr
1
dr
2
ω
d
ϕ
d
ϕ
3
r
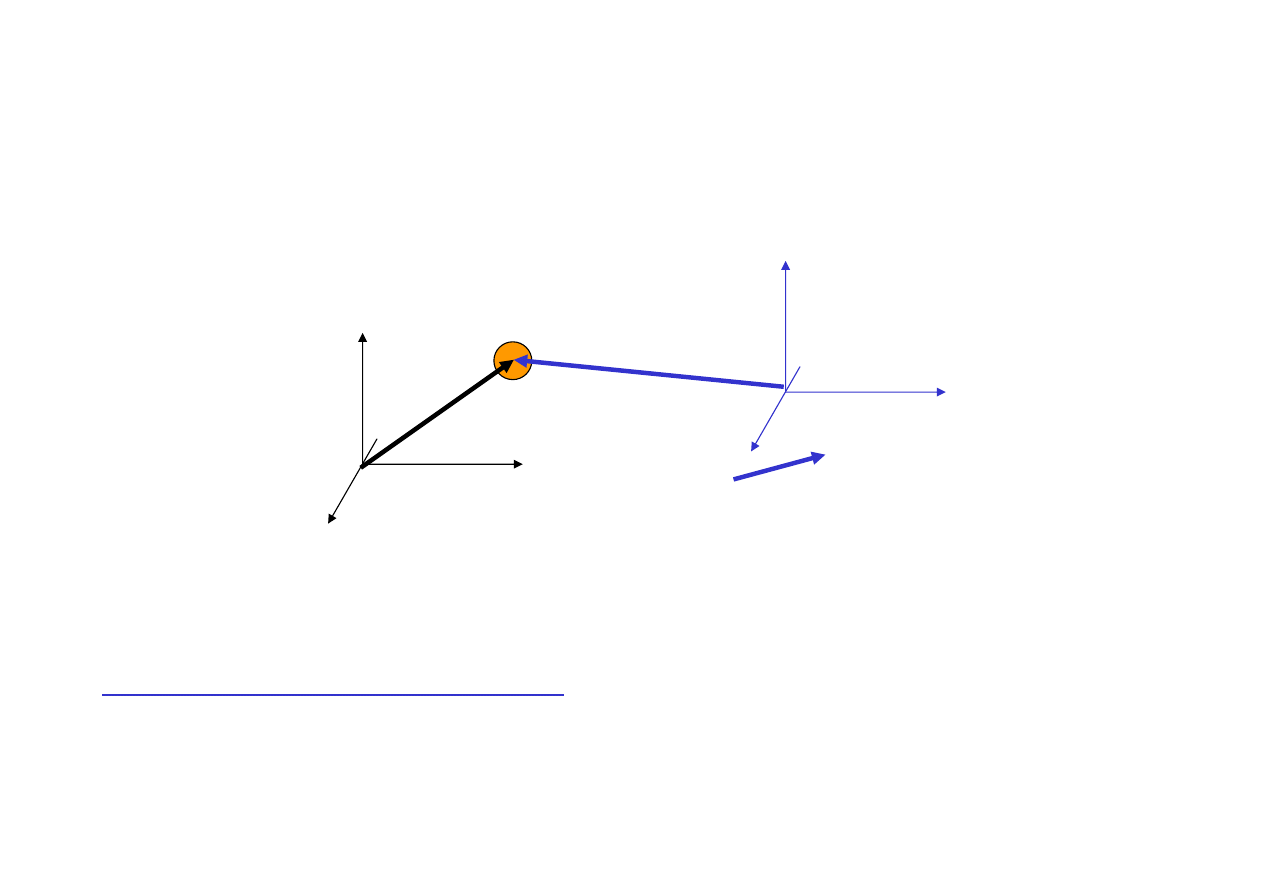
Transformacja Galileusza
względność ruchu
Układ (Ox
’
y
’
z
’)
porusza się względem układu (Oxyz)
ze stałą prędkością u po prostej,
ruch ciała P opisać można w obu układach; oba opisy wiąże ze sobą
transformacja Galileusza (Oxyz
⇒ Ox
’
y
’
z
’
):
x
y
z
x’
y’
z’
P
r
P
r
P
’
u
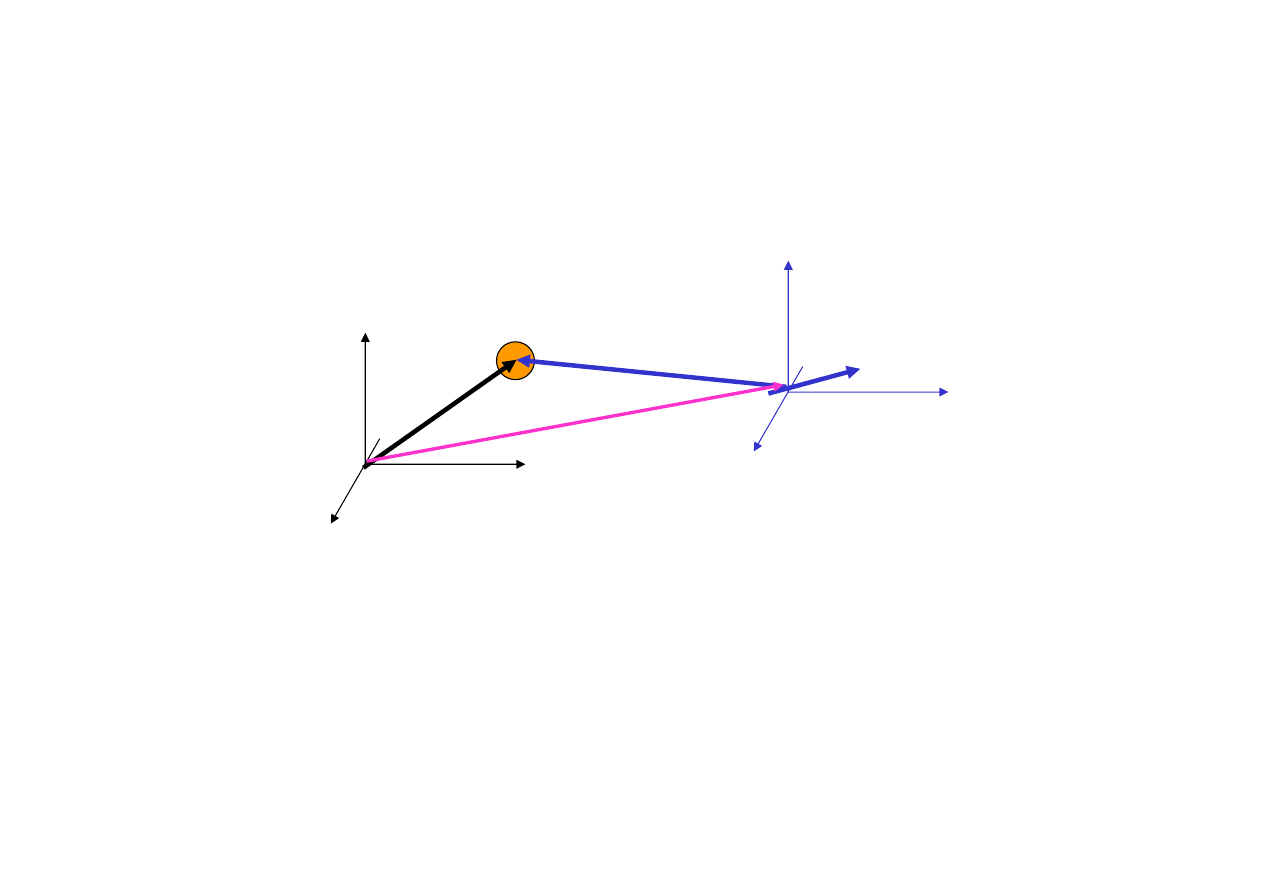
Transformacja Galileusza:
opis ruchu w różnych układach odniesienia
x
y
z
x’
y’
z’
P
r
P
r
P
’
u
r
u
-
wektor wodzący ciała P w układzie O
- wektor wodzący ciała P w układzie O’
- wektor wodzący układu O’ w układzie O
rr
u
rr
'
rr
'
r
r
r
u
r
r
r
+
=
Układ (Ox’y’z’) porusza się względem układu (Oxyz)
ze stałą prędkością
u
po prostej,
Prędkość
ciała P możemy obliczyć jako
vr
dt
r
dr
u
v
v
v
v
u
r
r
r
r
r
+
=
+
=
'
'
Układ O’ może dodatkowo wykonywać ruch
rotacyjny. Wówczas do powyższego wzoru
dojdzie czynnik prędkości kątowej:
'
'
r
u
v
v
r
r
r
r
×
+
+
=
ω
transformacja Galileusza (Ox’y’z’
⇒ Oxyz):
u
= const, v = v
’
+
u
,
a = a’ ;
lub: v
x
= v
x
’
+
u
x
; v
y
= v
y
’
+
u
y
; v
z
= v
z
’
+
u
z
;
oraz: x = x
’
+
u
x
t; y = y
’
+
u
y
t ; z = z
’
+
u
z
t ;
Transformacja Galileusza jest wyrazem względności ruchu
dt
v
d
a
r
r =
natomiast przyspieszenie czyli a=a’
Analiza ruchu wymaga pomiaru czasu i odległości
Pomiar czasu
Definicja czasu ?
Wzorzec czasu
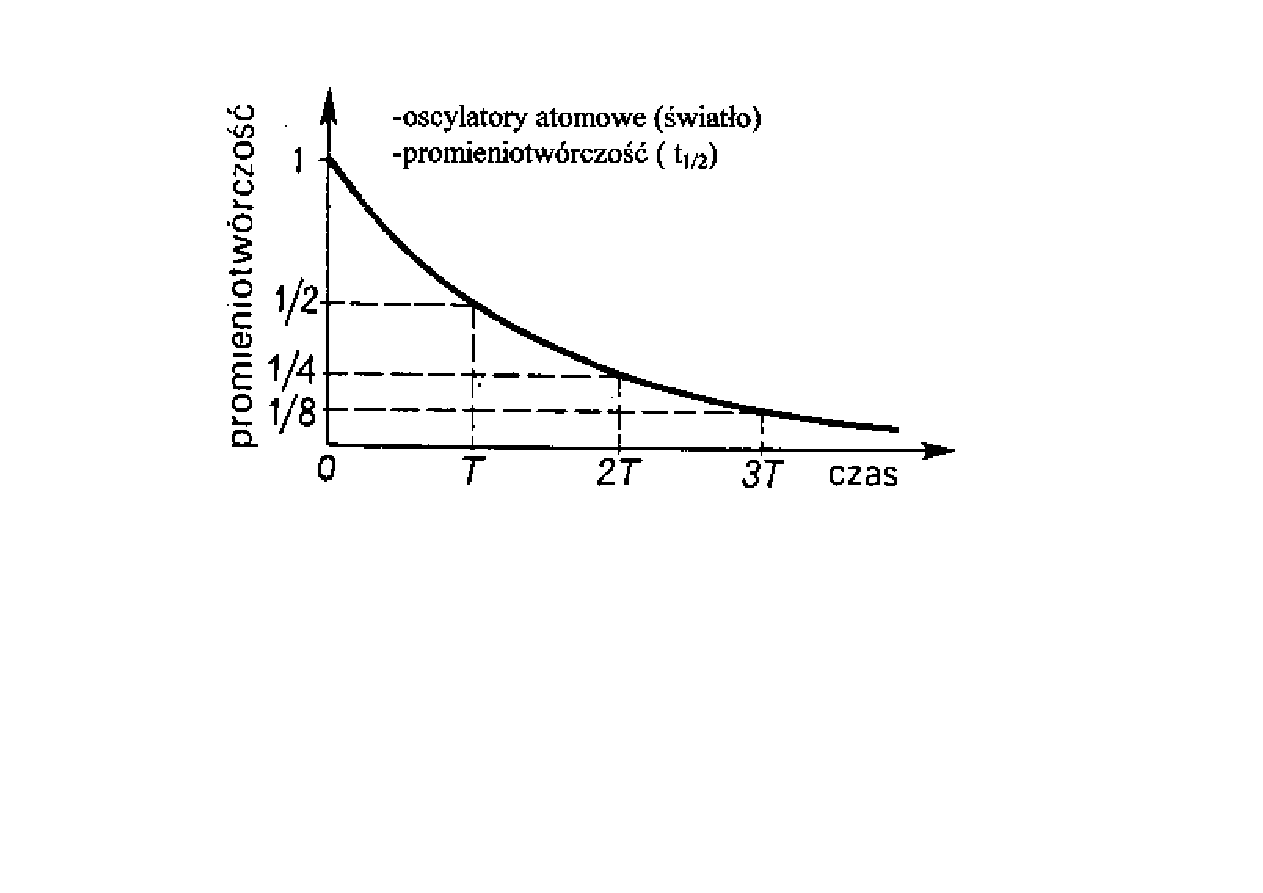
⇒ powtarzające się regularnie (okresowe) zjawisko
-puls
-wahadło
(Galileusz)
-astronomia (dzień, rok)
-oscylatory elektroniczne
Wzorzec czasu:
-astronomiczny
-atomowy
Jednostka:
[s] = 1/86400 średniej doby
9 192 631 770 okresów linii
55
133
Cs
obecna dokładność pomiaru czasu 1/1 000 000 000s (10
-9
s)
Δt > h/ΔE

Pomiar drogi
Wzorzec odległości
-antropogenetyczny, dłoń, łokieć
-standaryzowana jednostka, np. pręt
-astronomiczny
(Równik, odl. Ziemia-Słońce, Ziemia-gwiazda)
-atomowy
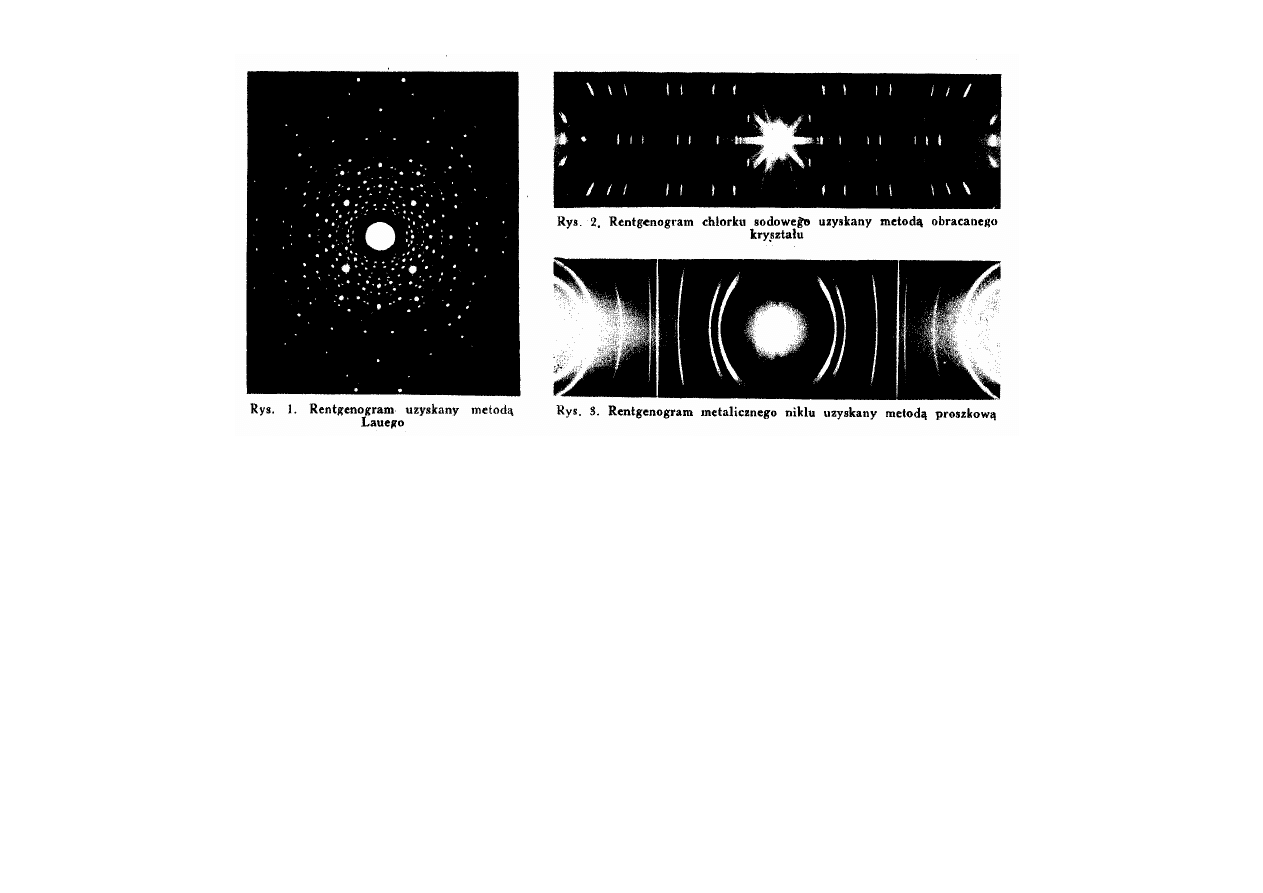
Metody pomiaru
- porównawcze
-triangulacyjne
-”radarowe”
-dyfrakcyjne
Jednostki
[m] = 1/40 000 000 Równika
- wzorzec w Sevre
-
1 650 763,73
λ pomarańczowej linii
36
86
Kr
Obecna dokładność pomiaru długości 1/10 000 000 000s (10
-10
m)
granica dokładności
Δx > h/Δp
Document Outline
- Wprowadzenie do algebry wektorów
- Dodawanie wektorów
- Mnożenie wektora r przez skalar k = wektor p :
- Osie układu prostokątnego (kartezjańskiego)
- Obroty
- Wektory osiowe i biegunowe (pseudowektory)
- Kinematyka punktu materialnego
- Pojęcia i definicje
- Parametry ruchu:
- Parametry ruchu obrotowego
- Wielkości wektorowe ruchu obrotowego
- Transformacja Galileusza względność ruchu
- Transformacja Galileusza: opis ruchu w różnych układach odniesienia
- Analiza ruchu wymaga pomiaru czasu i odległości Pomiar czasu
- Wzorzec czasu: -astronomiczny -atomowy Jednostka: [s] = 1/86400 średniej doby 9 192 631
- Pomiar drogi
Wyszukiwarka
Podobne podstrony:
E2 2010 id 149235 Nieznany
kinetyka 5 11 2010 id 235066 Nieznany
Arot 2010 07 2010 id 69283 Nieznany
c3 19 12 2010 id 97134 Nieznany
ARKUSZ POPRAWKA 2010 id 68814 Nieznany
mat prob styczen 2010(1) id 282 Nieznany
BIOCHEMIA skrypt 2010 id 86508 Nieznany
kolokwium 2010 id 240526 Nieznany
3 1 2010 id 33377 Nieznany (2)
LATO 2010 id 263802 Nieznany
zestaw pytan MiBM 2010 id 58854 Nieznany
MSI w2 konspekt 2010 id 309790 Nieznany
kt2 2010 id 253072 Nieznany
egzamin 06 2010 1 id 151726 Nieznany
MSI w1 konspekt 2010 id 309789 Nieznany
odp maj 2010 id 332085 Nieznany
c4 18 12 2010 id 97240 Nieznany
Grawitacja 2010 id 195612 Nieznany
karta oceny projektu 2010 id 23 Nieznany
więcej podobnych podstron