Serwomechanizm hydrauliczny, zasada działania model matematyczny.
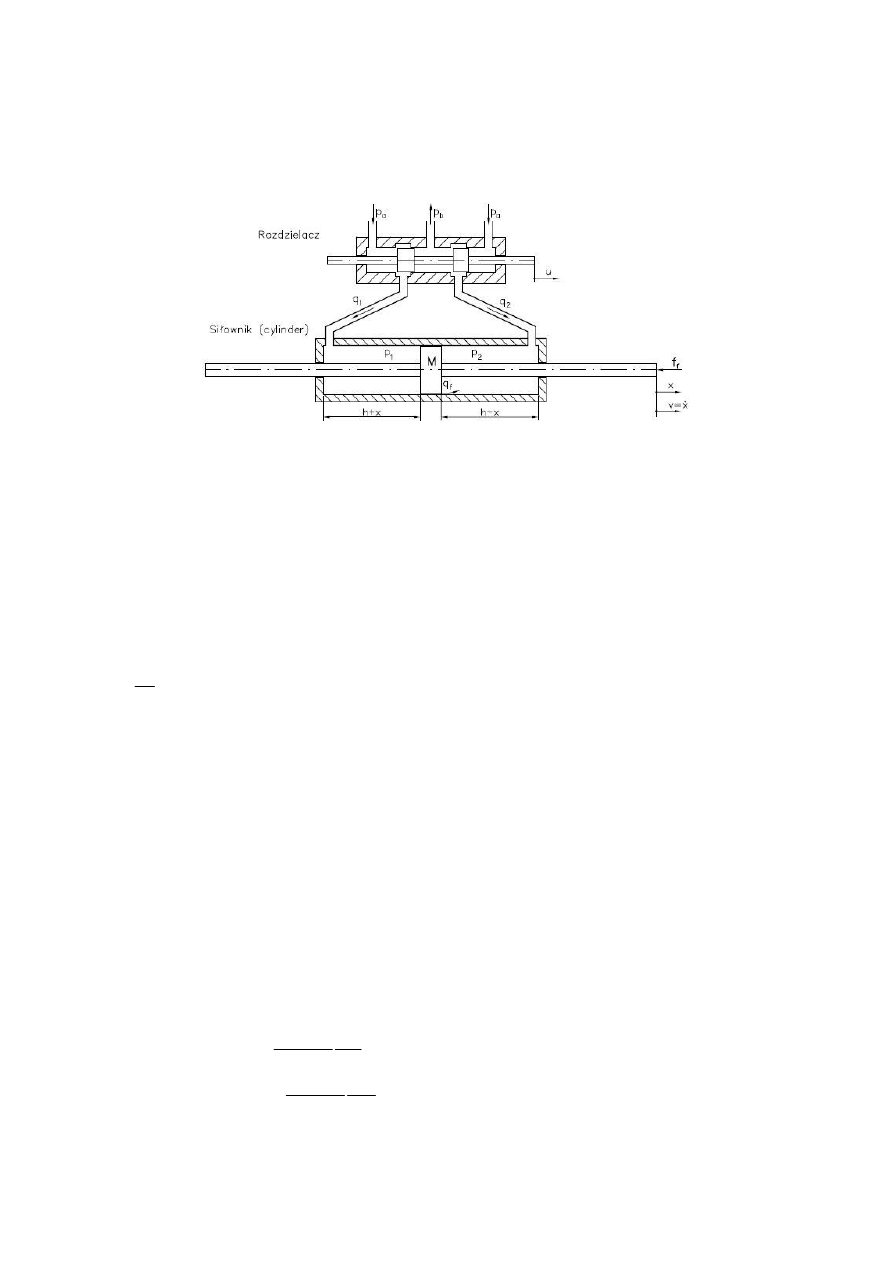
Na rys. 1 pokazano schemat serwonapędu hydraulicznego. Składa się on z siłownika
(cylindra) hydraulicznego i rozdzielacza sterującego przepływem cieczy do komór siłownika.
Rys. 1. Schemat ideowy serwomechanizmu hydraulicznego.
Przesunięcie tłoczka rozdzielacza - sygnał
u jest sygnałem sterującym, siła obciążająca
r
f
jest sygnałem zakłócającym, natomiast położenie tłoka siłownika
x i jego prędkość
x
v
są
sygnałami wyjściowymi.
Oznaczenia:
a
p - ciśnienie wejściowe - MPa,
b
p - ciśnienie wyjściowe - MPa,
u - sygnał sterujący - m,
x - przemieszczenie tłoka w cylindrze sygnał wyjściowy - m,
dt
dx
v
- prędkość tłoka w cylindrze -
1
ms
1
q - natężenie przepływu cieczy wpływającej do komory 1 -
1
3
s
m
,
2
q - natężenie przepływu cieczy wpływającej do komory 2 -
1
3
s
m
,
dla cieczy wpływającej do komory
0
i
q
f
q - natężenie przepływu przecieków międzykomorowych w cylindrze -
1
3
s
m
,
1
p ,
2
p - ciśnienia w komorach siłownika - MPa,
B
- moduł sprężystości objętościowej cieczy - MPa,
S
- pole czynnego przekroju tłoka w cylindrze -
2
m ,
r
f - siła zewnętrzna działająca na tłoczysko - N,
- współczynnik wiskotycznych oporów ruchu -
1
Nsm ,
M
- masa napędzanego mechanizmu zredukowana do osi tłoka - kg,
h
- połowa wartości skoku (zakresu ruchu) tłoka w cylindrze - m,
R
- współczynnik oporów przepływu laminarnego -
3
m
s
MPa
Równania opisujące procesy w siłowniku:
dt
dp
B
x
h
S
q
v
S
q
f
1
1
,
- wydatek cieczy dopływającej do komory „1”,
dt
dp
B
x
h
S
q
v
S
q
f
2
2
- wydatek cieczy dopływającej do komory „2”,
f
q
R
p
p
2
1
- spadek ciśnienia przy przepływie laminarnym,
r
f
v
p
p
S
dt
dv
M
2
1
- równanie ruchu ,
gdzie:
2
1
p
p
S
- siła parcia cieczy na tłok wskutek różnicy ciśnień,
v
- siła oporów ruchu (tarcia wiskotycznego),
r
f
- siła zewnętrzna działająca na tłoczysko.
Po uporządkowaniu otrzymuje się następujący układ równań stanu siłownika:
1
2
1
1
1
q
v
S
R
p
R
p
x
h
S
p
B
p
(1)
2
2
1
2
2
q
v
S
R
p
R
p
x
h
S
p
B
p
(2)
r
f
v
p
S
p
S
M
v
2
1
1
(3)
v
x
(4)
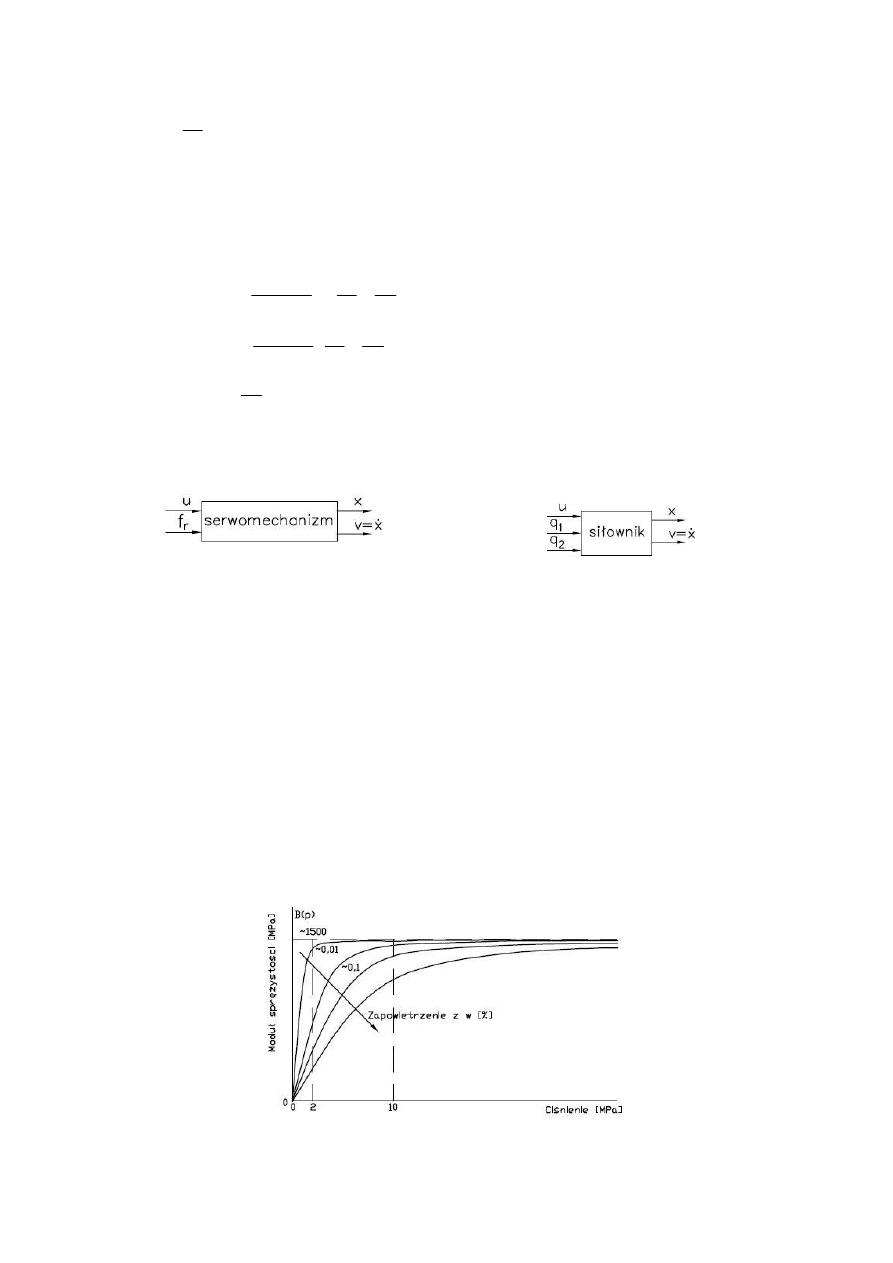
Któremu odpowiada schemat blokowy pokazany na rys. 2a.
Rys. 2. Schemat blokowy: a) serwomechanizmu hydraulicznego, b) siłownika w układzie.
Wektor zmiennych stanu ma postać:
x
v
p
p
2
1
x
Dodatkowo na rys. 2b pokazano schemat blokowy siłownika z zaznaczeniem zmiennych
wejściowych i wyjściowych.
Uwaga:
- zmienne
1
q ,
2
q i
r
f są traktowane jako sygnały wejściowe chociaż często
r
f jest zależne
od
x i
x
,
- moduł sprężystości objętościowej
B
jest zależny od rodzaju cieczy i bardzo silnie od jej
zapowietrzenia.
Rys. 3. Zależność modułu sprężystości objętościowej oleju mineralnego od zapowietrzenia.
Na rys. 3 przedstawiono Zależność modułu sprężystości objętościowej typowego oleju
mineralnego od współczynnika zapowietrzenia z wyrażającego procentową zawartość
masową powietrza rozpuszczonego w oleju do masy mieszaniny. Jak widać przy
%
1
,
0
z
i
ciśnieniu
MPa
p
10
można przyjąć
.
const
p
B
Dla
MPa
p
2
i zapowietrzeniu
%
01
,
0
z
można przyjmować, że
.
const
p
B
(dla olejów pochodzenia mineralnego
.
10
5
.
1
4
.
1
1500
1400
9
const
Pa
MPa
p
B
) Natomiast jeśli w obliczeniach
hydraulicznego układu napędowego i jego symulacjach nie uwzględni się rzeczywistej
zależności współczynnika B od wartości bieżącej ciśnienia
p
B
, to czasami można otrzymać
absurdalne wyniki, że
0
i
p
. W rzeczywistości przy dużym spadku ciśnienia w cieczy
zapowietrzonej następuje wydzielanie pęcherzy gazu, natomiast ciecz niezapowietrzona przy
spadku ciśnienia poniżej
Pa
p
i
1000
ulega intensywnemu wrzeniu w całej objętości co
nazywamy kawitacją. Fakt ten należy uwzględnić w obliczeniach symulacyjnych w postaci
odpowiednich warunków logicznych.
Rozdzielacz hydrauliczny
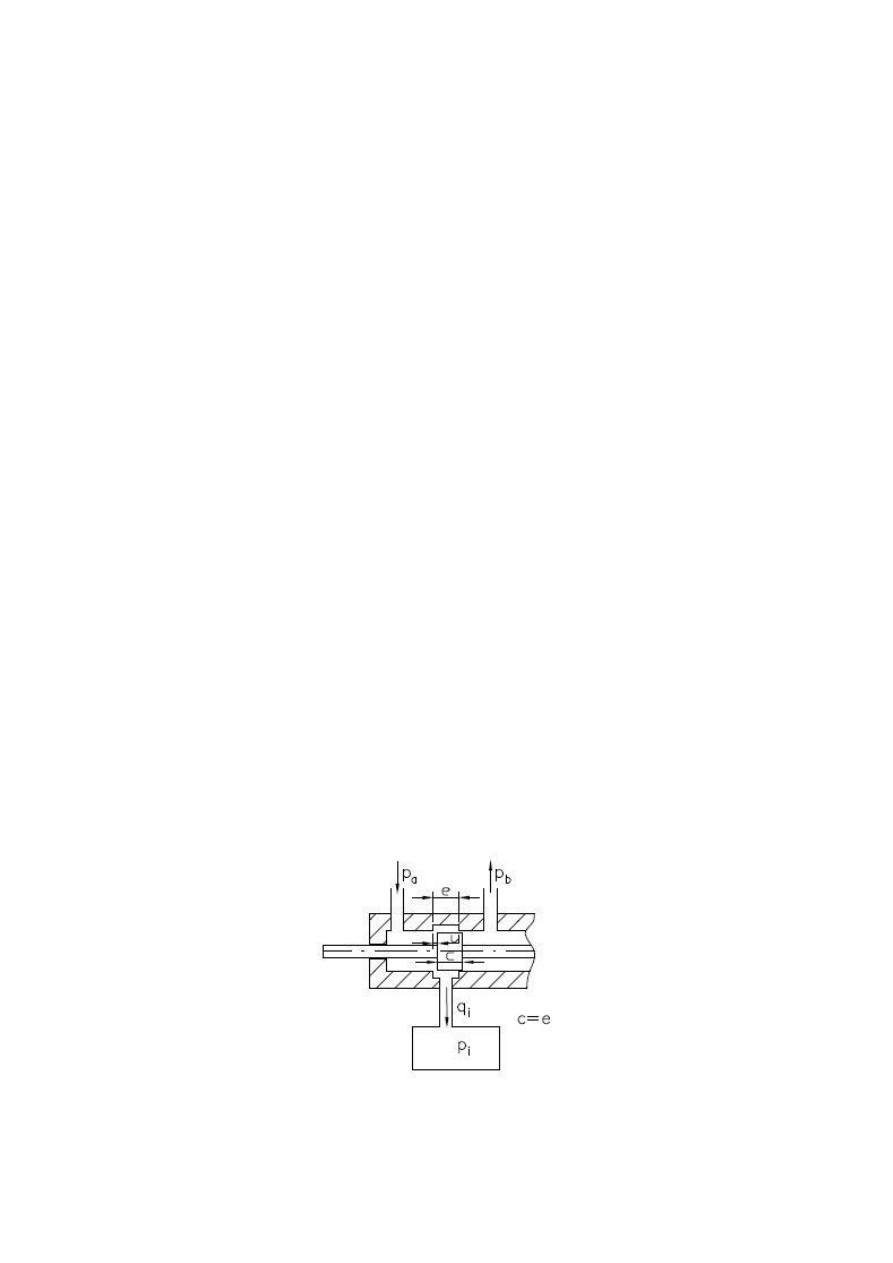
W celu odpowiedniej dystrybucji cieczy do cylindra stosuje się zespoły rozdzielaczy. Na
rys. 4 pokazano schemat ideowy typowego pojedynczego rozdzielacza. Składa się on z
tłoczka kształtowego oraz tulei do której z jednej strony jest doprowadzony czynnik pod
ciśnieniem
a
p a z drugiej czynnik jest odprowadzany na zlew do zbiornika zbiorczego przy
ciśnieniu
b
p . W tulei znajdują się też tzw. okna przepływowe z kanałami łączącymi do komór
cylindra hydraulicznego. Na rys. 4 pokazano jedno okno połączone z komorą. Rozdzielacz
pokazany na rys. 4 jest rozdzielaczem o przekryciu zerowym, tzn. szerokość tłoczka c jest
dokładnie równa szerokości okna e
e
c
z dokładnością do pojedynczych mikrometrów.
Należy wyjaśnić, że typowe średnice tłoczka wynoszą kilka do kilkanaście milimetrów przy
czym między tłoczkiem a tulejką nie montuje się uszczelek lecz poprzez dobór luzu o
wartości kilku mikrometrów jest realizowane tzw. uszczelnienie szczelinowe – stosunkowo
wysoka lepkość oleju w mikroskopijnej szczelinie nie pozwala na niekontrolowany przepływ
czynnika (przecieki). Takie rozwiązanie konstrukcyjne rozdzielacza wymaga bardzo
wysokich dokładności wykonania współpracujących elementów co do walcowości (kołowości
i prostoliniowości) oraz współliniowości elementów składowych zarówno tłoczka (w zespole
elementy o różnych średnicach) jak i tulejki (powierzchnia cylindryczna główna oraz
prowadzące tuleje boczne).
Rys. 4. Schemat ideowy rozdzielacza hydraulicznego z przekryciem zerowym (c=e).
Traktując przepływ w rozdzielaczu jako turbulentny oraz zakładając przekrycie zerowe,
mamy:
e
c ,
b
i
a
p
p
p
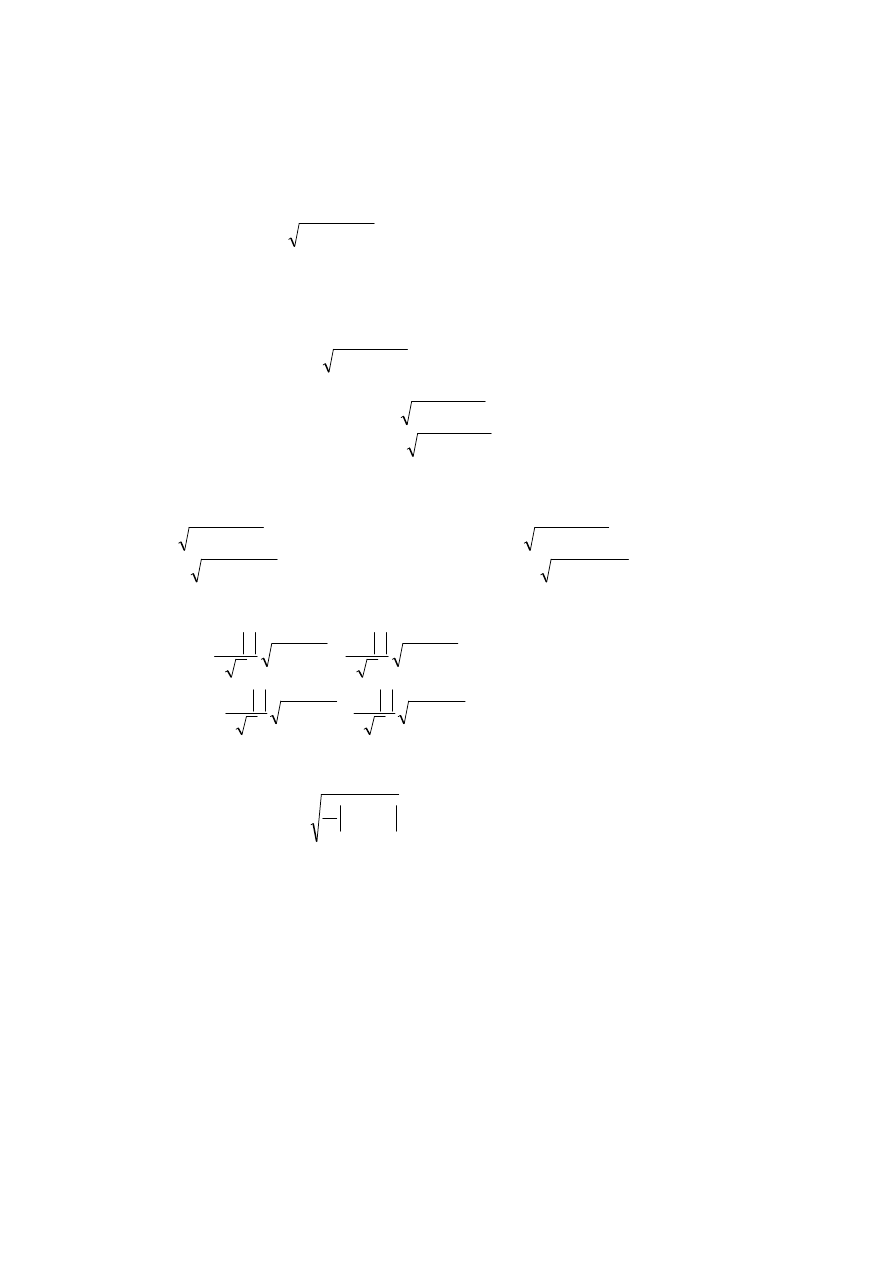
Natężenie przepływu w szczelinie rozdzielacza:
dla
e
u
0
,
2
,
1
i
0
2
i
a
i
p
p
u
k
q
Tutaj
0
i
q
oznacza przepływ w kierunku do i-tej komory
Mimo że w wyrażeniu pod pierwiastkiem występują wielkości mianowane (ciśnienie
p
) jest
to uwzględnione w wymiarze współczynnika
k
.
dla
e
u
natężenie przepływu osiąga wartość maksymalną i pozostaje stałe o wartości:
0
2
i
a
im
i
p
p
e
k
q
q
dla
0
u
dla
0
u
e
b
i
i
p
p
u
k
q
2
dla
e
u
b
i
im
p
p
e
k
q
2
,
W wypadku rozdzielacza tego typu w układzie serwomechanizmu z rys. 1 stosuje się
zależności:
dla
0
u
dla
0
u
0
2
1
1
p
p
u
k
q
a
0
2
2
2
b
p
p
u
k
q
0
2
1
1
b
p
p
u
k
q
(5)
0
2
2
2
p
p
u
k
q
a
(6)
Co można opisać w sposób jednolity za pomocą wzorów:
b
a
p
p
u
u
p
p
u
u
k
q
1
1
1
2
2
(5a)
2
2
2
2
2
p
p
u
u
p
p
u
u
k
q
a
b
(6a)
Uwaga: wzory te obowiązują przy założeniu
a
i
b
p
p
p
,
2
,
1
i
Jeżeli założenie to nie może być spełnione, to należy stosować wzór ogólny w postaci:
i
j
i
j
j
i
p
p
p
p
Fsign
q
2
,
(7)
gdzie
j
i
q
,
jest natężeniem przepływu cieczy z
tej
j
do
tej
i
komory, F jest umownym
(zastępczym) przekrojem przewodu łączącego komory
tą
j
i
tą
i
,
- jest gęstością
cieczy. Wzór (7) można stosować do wyznaczania natężenia przepływu między dowolnymi
komorami połączonymi krótkim przewodem którego przekrój zastępczy (umowny) ma
powierzchnię F . Dla rozdzielacza wartość bieżąca
u
k
F
a maksymalna
e
k
F
max
.
Wzory (1) do (6) stanowią pełny model wzmacniacza hydraulicznego i są wykorzystywane w
komputerowych modelach symulacyjnych.
Stan ustalony układu rozdzielacz-cylinder.
W pracy serwomechanizmu występują różne stany pracy, wśród których do celów oceny ich
pracy i do celów porównawczych wyróżnia się stany o wybranych parametrach zadanych i
stałych. Stan ustalony to taki, w którym prędkość na wyjściu jest równa zero, chwilowe
położenie jest stałe. Oznaczając zmienne w stanie ustalonym poziomą kreską ponad
symbolem zastosujemy następujące podstawienia:
u
u
:
,
i
i
p
p
:
,
0
i
p
,
0
v
,
.
:
const
x
x
co oznacza, że w układzie z rys. 1 tłok w cylindrze stoi zablokowany (ale nie przez hamulec
zewnętrzny lecz wskutek równowagi ciśnień i siły zewnętrznej w obecności innych
czynników).
Rozważymy własności układu z rys. 1 wyposażonego w rozdzielacz z przekryciem zerowym.
Mamy tu
f
q
q
q
2
1
,
co oznacza, że
b
a
p
p
u
k
p
p
u
k
2
1
,
czyli
b
a
p
p
p
p
2
1
skąd
b
a
p
p
p
p
2
1
(8)
Z zależności (3) dla stanu ustalonego mamy:
S
f
p
p
r
2
1
(3a)
Wobec tego z (8) i (3a) można napisać:
S
f
p
p
p
r
b
a
2
1
1
(9)
S
f
p
p
p
r
b
a
2
1
2
(10)
Nominalne własności rozdzielacza określa się w warunkach nominalnych, dla których
0
r
f
,
wtedy:
b
a
nom
p
p
p
p
p
2
1
2
1
Maksymalne natężenie przepływu w warunkach nominalnych wynosi:
b
a
b
a
a
m
m
p
p
e
k
p
p
p
e
k
q
q
2
1
2
1
Współczynnik wzmocnienia rozdzielacza określa się dla warunków nominalnych jako:
b
a
m
p
p
k
e
q
u
q
A
Na rys. 5 pokazano charakterystykę statyczną rozważanego rozdzielacza (z przekryciem
zerowym) w warunkach nominalnych.
Rys. 5. Charakterystyka statyczna rozdzielacza hydraulicznego z przekryciem zerowym.
Jak widać z wykresu na rys. 5 zmiana sygnału sterującego u w przedziale
e
e
u
,
wywołuje liniową zmianę wydatku cieczy przepływającej przez rozdzielacz a przy dalszym
wzroście wartości bezwzględnej sygnału u wartość natężenia przepływu (wydatku) ulega
ustaleniu – mówimy, że rozdzielacz przechodzi w stan nasycenia. Doświadczalnie wartość
wzmocnienia można wyznaczyć wykorzystując liniowość przebiegu w zakresie
e
e
u
,
z
zależności:
e
q
u
q
A
m
2
2
gdzie wartości
m
q
2
i
e
2
można łatwo zmierzyć albo oszacować z wykresów sporządzonych
na podstawie pomiarów.
Własności rozdzielacza z przekryciem dodatnim.
Rys. 6. Schemat ideowy rozdzielacza hydraulicznego z przekryciem dodatnim (c>e).
Na rys. 6 pokazano schemat ideowy rozdzielacza z przekryciem dodatnim. Tłoczek w tym
rozwiązaniu ma szerokość większą od szerokości okna, co powoduje, że w trakcie pracy przy
zmianie sygnału sterującego z wartości dodatniej na wartość ujemną w zakresie
r
r
u
,
prześwit rozdzielacza jest zamknięty i zmiana sygnału sterującego w tym zakresie nie
wywołuje zmiany stanu przepływu.
Mamy tutaj:
r
e
u
,
e
A
q
q
m
,
r
u
r
e
r
u
A
q
r
u
r
0
q
r
e
u
r
r
u
A
q
dla
r
e
u
,
e
A
q
q
m
,
Rys. 7. Charakterystyka statyczna rozdzielacza hydraulicznego z przekryciem dodatnim.
Własności rozdzielacza z przekryciem ujemnym.
Rys. 8. Schemat ideowy rozdzielacza hydraulicznego z przekryciem ujemnym (c<e).
Na rys. 8 pokazano schemat ideowy rozdzielacza z przekryciem ujemnym. Tłoczek w tym
rozwiązaniu ma szerokość mniejszą od szerokości okna, co powoduje, że w trakcie pracy przy
zmianie sygnału sterującego z wartości dodatniej na wartość ujemną w zakresie
d
d
u
,
prześwit między tłoczkiem i oknem rozdzielacza zarówno po prawej jak i po lewej stronie
tłoczka jest otwarty, co w trakcie pracy wywołuje przecieki przepływu z części zasilającej na
zlew.
Mamy tutaj:
dla,
d
e
u
0
'
q
,
m
q
q
"
,
e
A
q
q
m
d
u
d
e
0
'
q
,
d
u
A
q
"
,
d
u
A
q
d
u
d
d
u
A
q
'
,
d
u
A
q
"
,
u
A
q
2
d
e
u
d
d
u
A
q
'
,
0
"
q
,
d
u
A
q
d
e
u
,
m
q
q
'
,
0
"
q
,
e
A
q
q
m
Rys. 9. Charakterystyka statyczna rozdzielacza hydraulicznego z przekryciem ujemnym.
W zakresie sygnału sterującego
d
d
u
,
wzmocnienie rozdzielacza jest dwukrotnie
większe niż rozdzielacza z przekryciem zerowym i dodatnim co zapewnia wyższą jakość
przebiegów przejściowych. Ponadto przecieki skrośne w tym zakresie sygnału u zapewniają
lepsze własności tłumiące dla przebiegów przejściowych. Wadą tego rozwiązania są straty
mocy i niższa sprawność oraz silne nagrzewanie się czynnika i elementów rozdzielacza.
Wyszukiwarka
Podobne podstrony:
NAPEDY HYDRAULICZNE id 313565 Nieznany
hydraulika] id 207571 Nieznany
angielski dla hydraulikow id 64 Nieznany
Napedy 3m id 313586 Nieznany
8 PODSADZKA HYDRAULICZNA id 470 Nieznany (2)
Opracowanie z hydrauliki id 338 Nieznany
Hydraulik 712601 id 207464 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
więcej podobnych podstron