Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 1/6
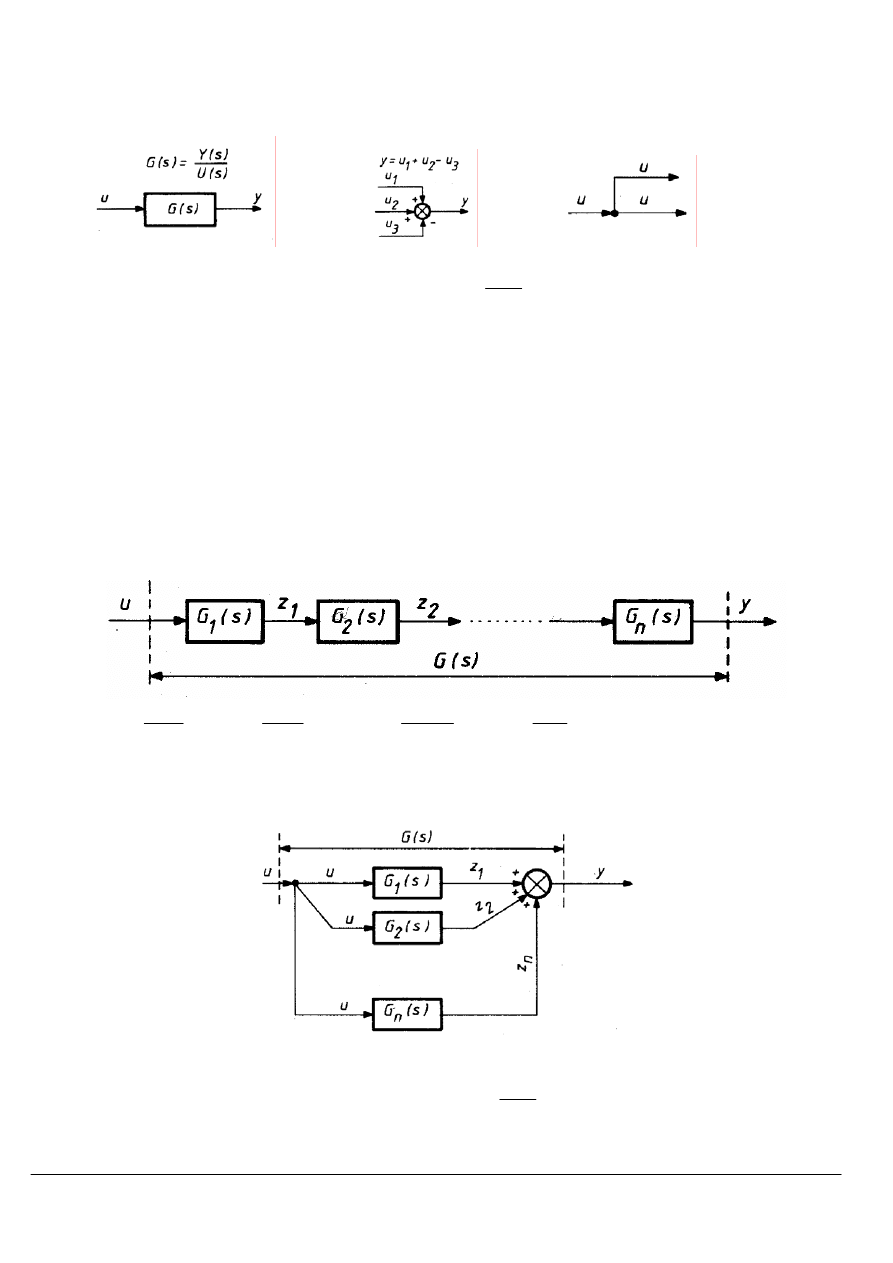
5. Schematy blokowe
Elementy schematów blokowych
elementy
dynamiczne
węzły sumujące
węzły informacyjne (zaczepowe)
Element dynamiczny – transmitancja operatorowa
)
(
)
(
)
(
s
U
s
Y
s
G
=
Węzeł sumujący – co najmniej dwa wejścia i jedno wyjście; sygnał wyjściowy jest sumą sygnałów
wejściowych z odpowiednimi znakami
Węzeł informacyjny (zaczepowy) – tylko jedno wejście i co najmniej dwa wyjścia; sygnały wyjściowe są
równe sygnałowi wejściowemu.
5.1. Przekształcenia schematów blokowych
Elementy zastępcze typowych połączeń:
• szeregowe
• równoległe
• sprzężenie zwrotne
5.1.1. Połączenie szeregowe
)
(
)
(
)
(
G
;...;
)
(
)
(
)
(
G
;
)
(
)
(
)
(
1
n
1
2
2
1
1
s
Z
s
Y
s
s
Z
s
Z
s
s
U
s
Z
s
G
n
−
=
=
=
=>
)
(
)...
(
)
(
U(s)
Y(s)
G(s)
2
1
s
G
s
G
s
G
n
=
=
Transmitancja połączenia szeregowego => iloczyn transmitancji
5.2.2. Połączenie równoległe
Ten sam sygnał na wejście elementu sumacyjnego
)
(
)
(
)
(
...
)
(
)
(
)
(
1
2
1
s
U
s
G
s
z
s
z
s
z
s
Y
n
i
i
n
∑
=
=
+
+
+
=
=>
)
(
)
(
)
(
)
(
1
s
G
s
U
s
Y
s
G
n
i
i
∑
=
=
=
Połączenie równoległe => suma transmitancji poszczególnych elementów
Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 2/6
5.2.3. Sprzężenie zwrotne
W torze głównym element
)
(
1
s
G
, w pętli sprzężenia zwrotnego element
)
(
2
s
G
w węźle sygnał wejściowy
u
jest algebraicznie sumowany z sygnałem
z
pochodzącym z pętli sprzężenia
zwrotnego; gdy sygnał odejmowany (jak na rysunku), to
)
(
)
(
)
(
)
(
1
s
Z
s
U
s
Y
s
G
−
=
,
)
(
)
(
)
(
G
2
s
Y
s
Z
s
=
=>
)
(
)
(
)
(
1
)
(
)
(
)
(
2
1
s
U
s
Y
s
G
s
U
s
Y
s
G
−
=
=>
sprzężenie zwrotne ujemne
)
(
)
(
1
)
(
)
(
)
(
)
(
2
1
1
s
G
s
G
s
G
s
U
s
Y
s
G
+
=
=
dodatnie
)
(
)
(
1
)
(
)
(
2
1
1
s
G
s
G
s
G
s
G
−
=
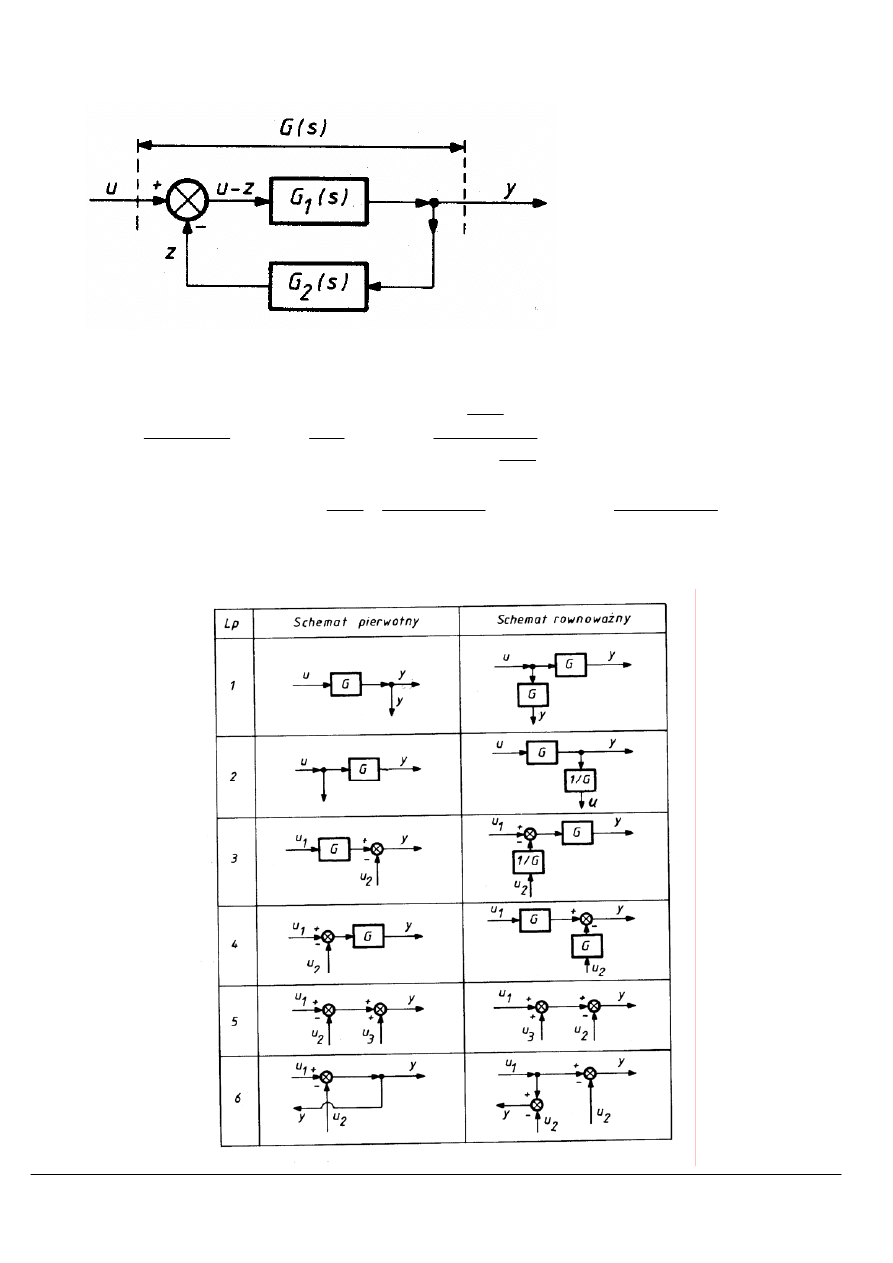
Algebra schematów blokowych
Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 3/6
Zadania
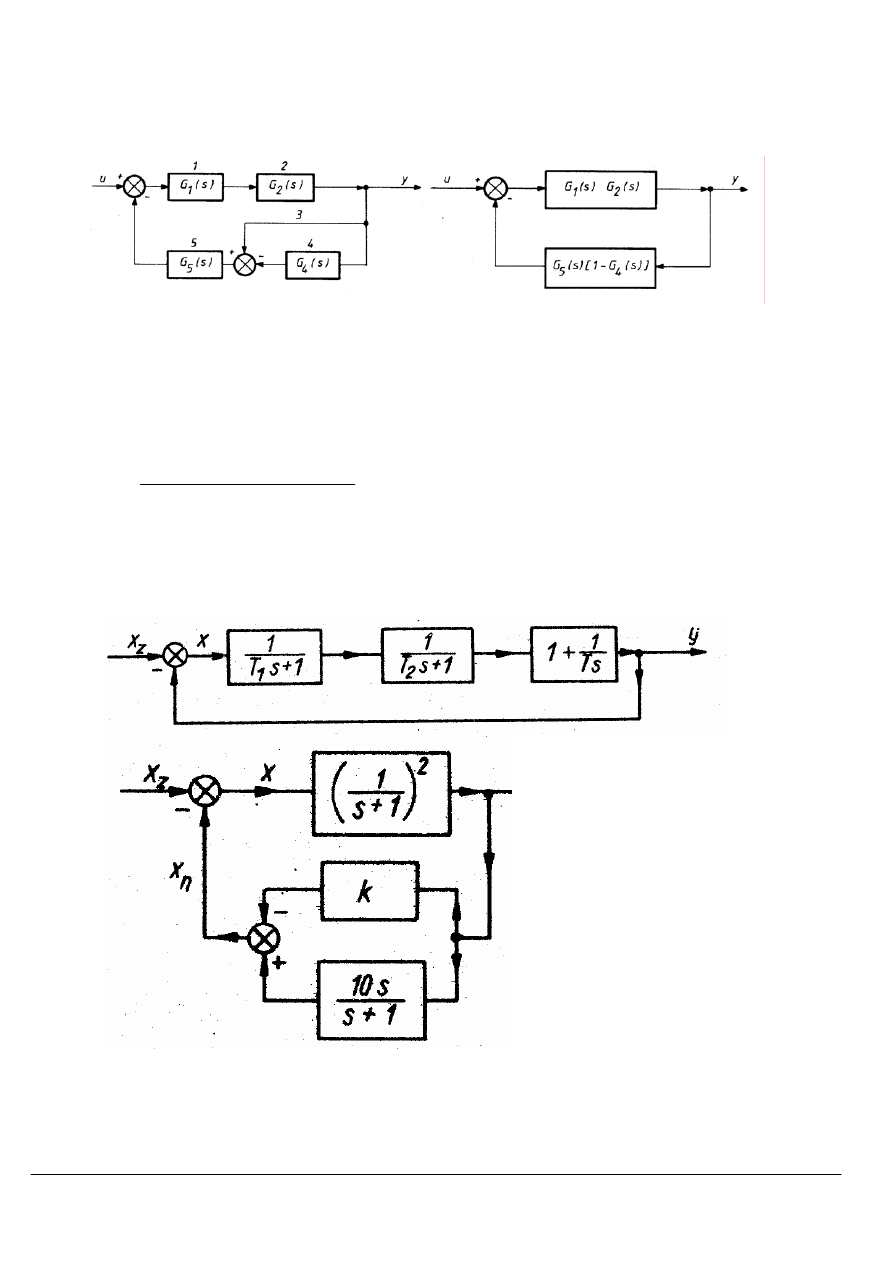
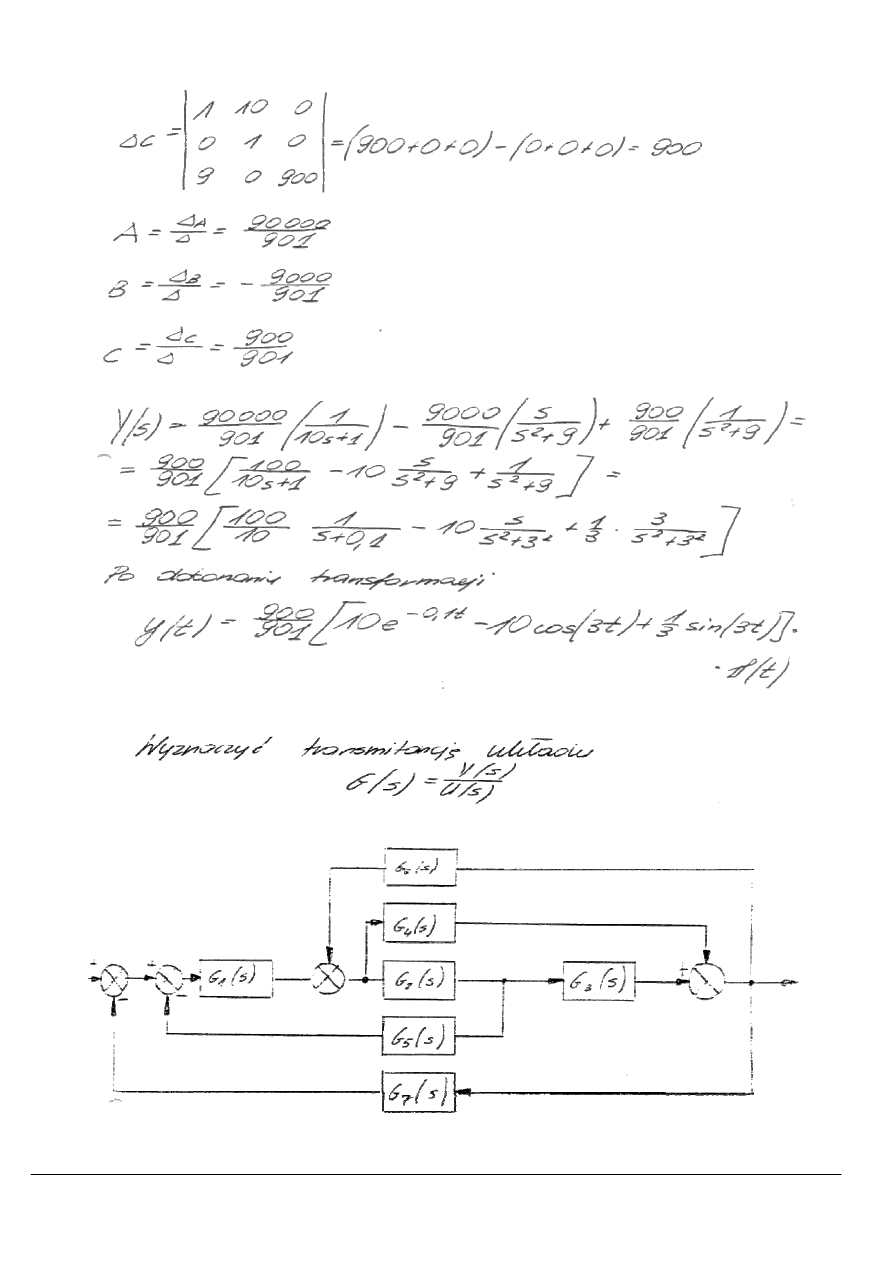
1. Wyznaczyć transmitancję układu jak na rys
Elementy szeregowe
1
G
i
2
G
, stąd
)
(
)
(
)
(
2
1
12
s
G
s
G
s
G
=
Transmitancja gałęzi (3) równa jest jedności, transmitancja gałęzi (4) jest
4
G
Elementy (3) i (4) są połączone równolegle, stąd
)
(
1
)
(
4
34
s
G
s
G
−
=
Elementy (3), (4) i (5) to element (5) szeregowo połączony z (3;4), stąd
[
]
)
(
)
(
1
)
(
)
(
)
(
5
4
5
34
345
s
G
s
G
s
G
s
G
s
G
−
=
=
Elementy (1;2) oraz (3;4;5) połączone są w pętli sprzężenia zwrotnego, ujemnego, stąd
[
]
)
(
1
)
(
)
(
)
(
1
)
(
)
(
)
(
4
5
2
1
2
1
s
G
s
G
s
G
s
G
s
G
s
G
s
G
−
+
=
2. Uprościć podane niżej schematy blokowe. Wyznaczyć transmitancję układu uproszczonego.
a)
b)
Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 4/6
3
Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 5/6
4
Podstawy Automatyki i Sterowania – wykład 3
© J.Narkiewicz, M.Zasuwa 2005 strona 6/6
5
Wyszukiwarka
Podobne podstrony:
PAS 03 if else case doc
PAS odp 03
03 Sejsmika04 plytkieid 4624 ppt
03 Odświeżanie pamięci DRAMid 4244 ppt
podrecznik 2 18 03 05
od Elwiry, prawo gospodarcze 03
Probl inter i kard 06'03
TT Sem III 14 03
03 skąd Państwo ma pieniądze podatki zus nfzid 4477 ppt
03 PODSTAWY GENETYKI
Wyklad 2 TM 07 03 09
03 RYTMY BIOLOGICZNE CZŁOWIEKAid 4197 ppt
Rada Ministrow oficjalna 97 03 (2)
więcej podobnych podstron