
1
POLITECHNIKA BIAŁOSTOCKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA ENERGOELEKTRONIKI I NAPĘDÓW ELEKTRYCZNYCH
Instrukcja do zajęć laboratoryjnych dla studentów
WYDZIAŁU MECHANICZNEGO
Studiów stacjonarnych i niestacjonarnych
z przedmiotów
PODSTAWY ELEKTROTECHNIKI I ELEKTRONIKI
Kody przedmiotów: MKBMS02011, MKBMN01002
ELEKTROTECHNIKA I ELEKTRONIKA
Kody przedmiotów: MKARS02010; MKIBS02015; MKTRS02011; MKETS02014;
MKARN02010; MKIBN02018; MKTRN03018.
ĆWICZENIE 3M
STEROWANIE NAWROTEM SILNIKA TRÓJFAZOWEGO
Opracował
dr inż. Adam Kuźma
BIAŁYSTOK 2013

2
Instrukcja jest własnością Katedry Energoelektroniki i Napędów Elektrycznych.
Do użytku wewnętrznego katedry.
Powielanie i rozpowszechnianie zabronione

3
Ogólne zasady bezpieczeństwa
Przed przystąpieniem do zajęć należy zapoznać się z instrukcją dydaktyczną stanowiska
laboratoryjnego.
Dokonać oględzin urządzeń i przyrządów używanych w ćwiczeniu, a o zauważonych
nieprawidłowościach bezzwłocznie powiadomić prowadzącego.
Zabrania się samodzielnego załączania stanowiska bez zgody prowadzącego.
Zmian nastaw parametrów lub konfiguracji, możliwych przy użyciu dostępnych
manipulatorów (potencjometrów, przełączników), należy dokonywać po przeanalizowaniu
skutków takich działań.
Zmian konfiguracji obwodów elektrycznych, możliwych jedynie poprzez zmiany połączeń
przewodów, należy dokonywać za zgodą prowadzącego po uprzednim wyłączeniu
zasilania stanowiska.
Po załączeniu stanowiska wykonywanie przełączeń (np. wymiana przyrządu)
w układzie znajdującym się pod napięciem jest niedozwolone.
W w/w stanowisku dostępne są części czynne obwodu elektrycznego o napięciu
przekraczającym napięcie bezpieczne, dlatego przed uruchomieniem należy zachować
odpowiednie oddalenie od tych części czynnych w celu uniknięcia porażenia prądem
elektrycznym.
Stosowanie sposobów sterowania, ustawień lub procedur innych niż opisane w instrukcji
może spowodować nieprzewidziane zachowanie obiektu sterowanego a nawet uszkodzenie
stanowiska.
Nie należy dołączać urządzeń nie przeznaczonych do współpracy z tym stanowiskiem
laboratoryjnym.
Przekroczenie dopuszczalnych parametrów prądów, napięć sygnałów sterujących może
doprowadzić do przegrzania się niektórych podzespołów, pożaru lub porażenia prądem.
W przypadku pojawienia się symptomów nieprawidłowego działania (np. swąd
spalenizny) natychmiast należy wyłączyć stanowisko i odłączyć przewód zasilający.
Demontaż osłon stanowiska oraz wszelkie naprawy i czynności serwisowe, oprócz
opisanych w instrukcji, powinny być wykonywane przez wykwalifikowany personel po
wyłączeniu stanowiska.
Należy stosować tylko bezpieczniki o parametrach nominalnych podanych w instrukcji lub
na obudowie urządzenia.
Urządzenie powinno być czyszczone przy użyciu suchej i miękkiej szmatki. Nie należy
stosować do tych celów rozpuszczalników.
Podczas korzystania z aparatury laboratoryjnej (oscyloskopy, generatory, zasilacze itp.)
należy przestrzegać ogólnych zasad bezpieczeństwa tj.:
- Do zasilania przyrządu należy stosować tylko przewody zalecane do danego wyrobu.
- Nie należy dołączać lub odłączać sond i przewodów pomiarowych, gdy są one
dołączone do źródła napięcia.
- Przyrząd powinien być połączony z uziemieniem przez przewód ochronny w kablu
zasilającym. Aby uniknąć porażenia przewód ten powinien być dołączony do przewodu
ochronnego sieci.
- Przewód uziemiający sondy należy dołączać tylko do uziemienia ochronnego. Nie
należy dołączać go do punktów o wyższym potencjale.
- Aby uniknąć porażenia prądem podczas używania sondy, należy trzymać palce nad
pierścieniem zabezpieczającym. Nie wolno dotykać metalowych części grotu, gdy
sonda jest dołączona do źródła napięcia
- Nie dotykać końcówek przewodów łączeniowych w trakcie wykonywania pomiarów.

4
I.
WPROWADZENIE
Wiadomości niezbędne do realizacji ćwiczenia:
1. Podstawowe wiadomości o trójfazowych silnikach asynchronicznych
klatkowych, zmiana kierunku obrotów, tabliczka znamionowa.
2. Aparatura sterująca: przyciski sterownicze, styczniki, przekaźniki,
wyłączniki krańcowe.
3. Analiza podstawowych schematów układów sterowania stycznikowego.
II.
CEL I ZAKRES ĆWICZENIA LABORATORYJNEGO
Praktyczne zapoznanie studentów ze sterowaniem dwukierunkową pracą
trójfazowego silnika klatkowego zastosowanego do napędu modelu suportu.
Zakres ćwiczenia obejmuje sterowanie ręczne i sterowanie automatyczne pracą
nawrotną w zastosowaniu do suportu.
III. PODSTAWOWE WIADOMOŚCI TEORETYCZNE:
1. Budowa i zasada działania silnika indukcyjnego klatkowego.
Silnik asynchroniczny (indukcyjny) to najbardziej popularny silnik,
o szerokim zastosowaniu, wykorzystywany szczególnie w przemyśle, ale
również i w sprzęcie domowym. Charakteryzuje się bardzo prostą, i łatwą
w utrzymaniu
konstrukcją.
Moce
budowanych
obecnie
silników
asynchronicznych obejmują zakres od ułamków kilowatów do kilku
megawatów.
5
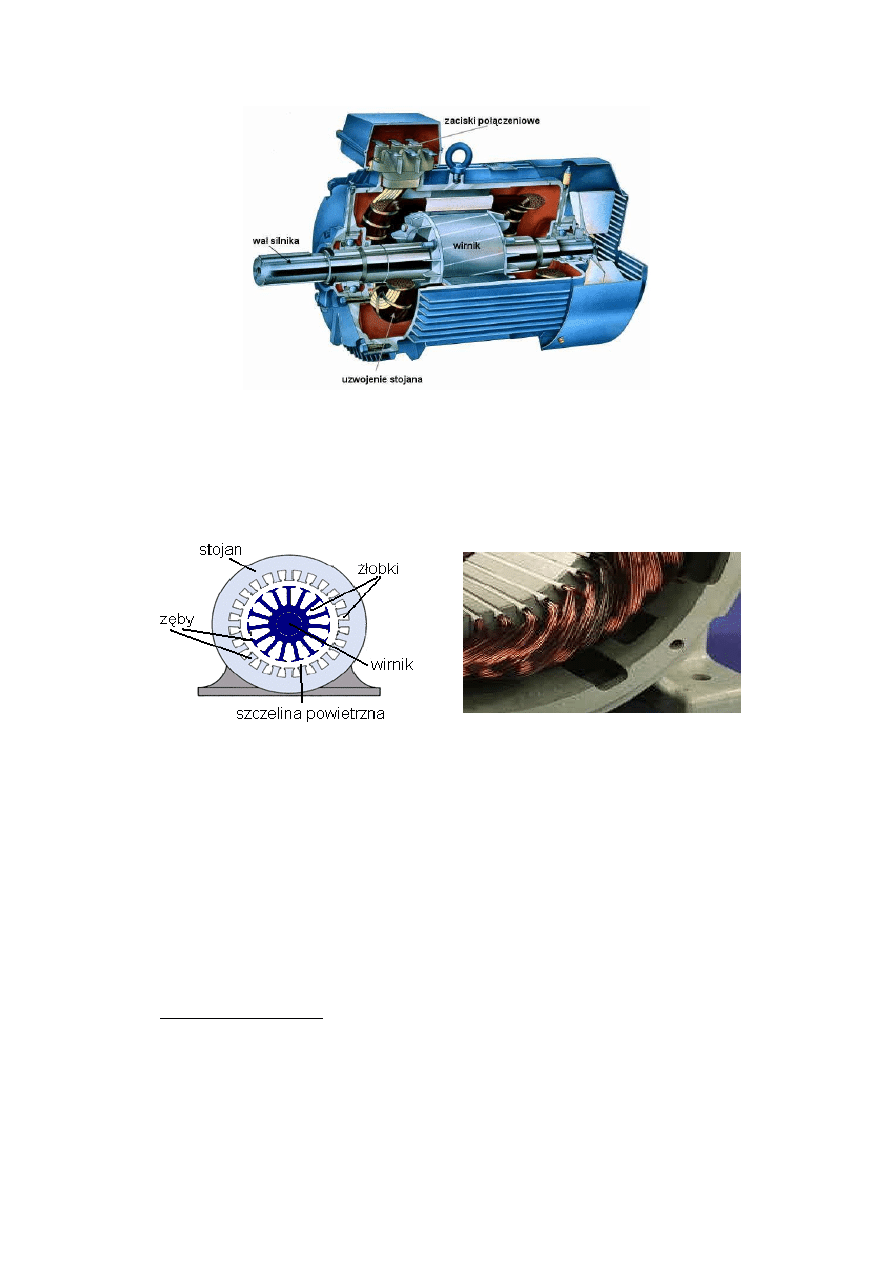
Rys. 1. Silnik indukcyjny trójfazowy – przekrój.
Silnik indukcyjny składa się z dwóch zasadniczych części: nieruchomego
stojana i ruchomego (wirującego) wirnika.
a)
b)
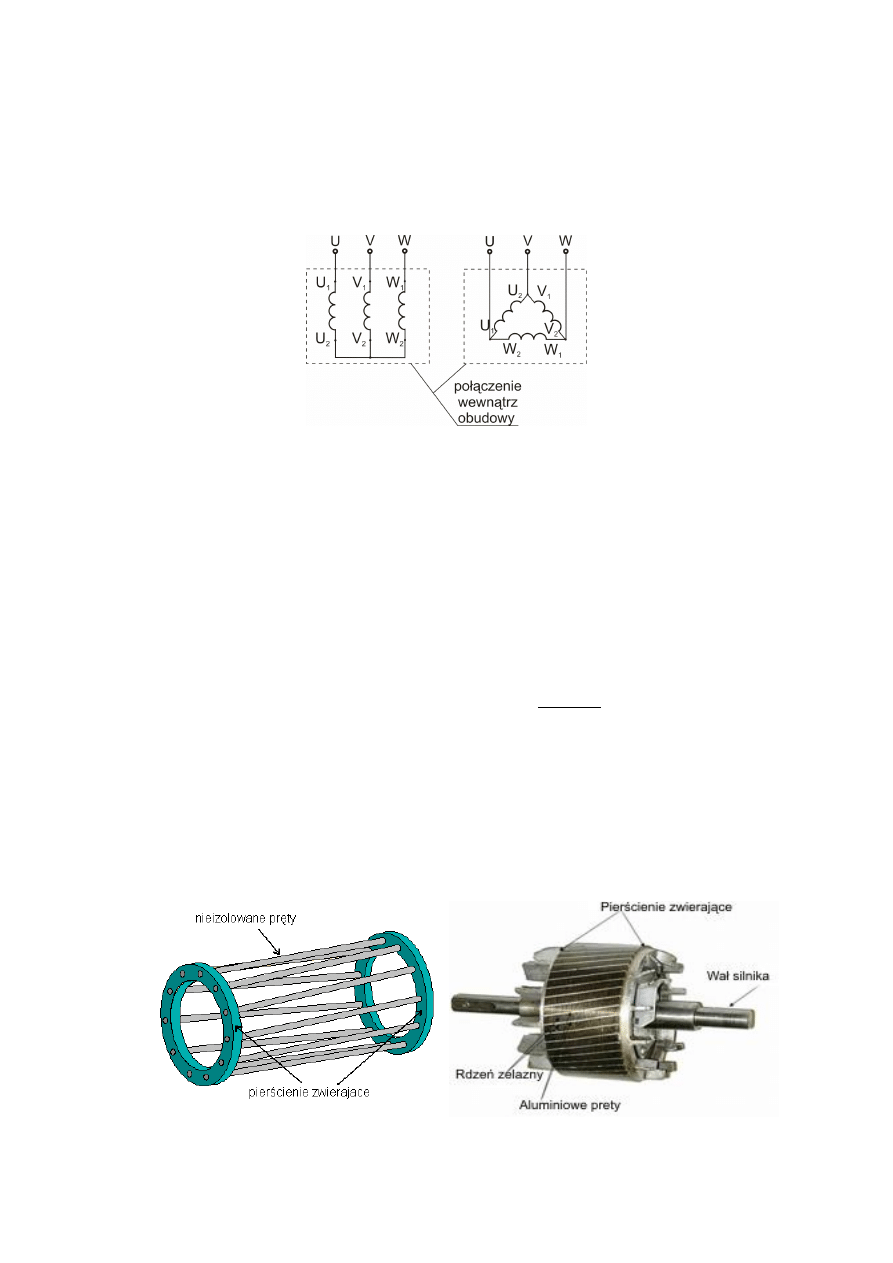
Rys. 2a) Przekrój poprzeczny silnika b) rzeczywisty widok uzwojeń stojana.
Na wewnętrznej stronie rdzenia stojana i zewnętrznej stronie rdzenia
wirnika wykonane są specjalne rowki, zwane żłobkami, w których umieszczone
są uzwojenia. Części rdzenia pomiędzy sąsiednimi rowkami, nazywane są
zębami. Żłobki i zęby mogą posiadać różne kształty, zwykle ich liczba w
stojanie i wirniku jest różna. Pomiędzy stojanem a wirnikiem znajduje się
możliwie mała szczelina powietrzna (rys. 2a).
Uzwojenie stojana wykonane jest z izolowanego miedzianego drutu
nawojowego (rys. 2b). Uzwojenie jest zaimpregnowane i mocno usztywnione
tak, aby zmniejszyć prawdopodobieństwo uszkodzenia na skutek drgań
mechanicznych.
6
W silniku trójfazowym uzwojenie stojana składa się z trzech uzwojeń
fazowych rozmieszczonych równomiernie w żłobkach stojana. Stosowane są
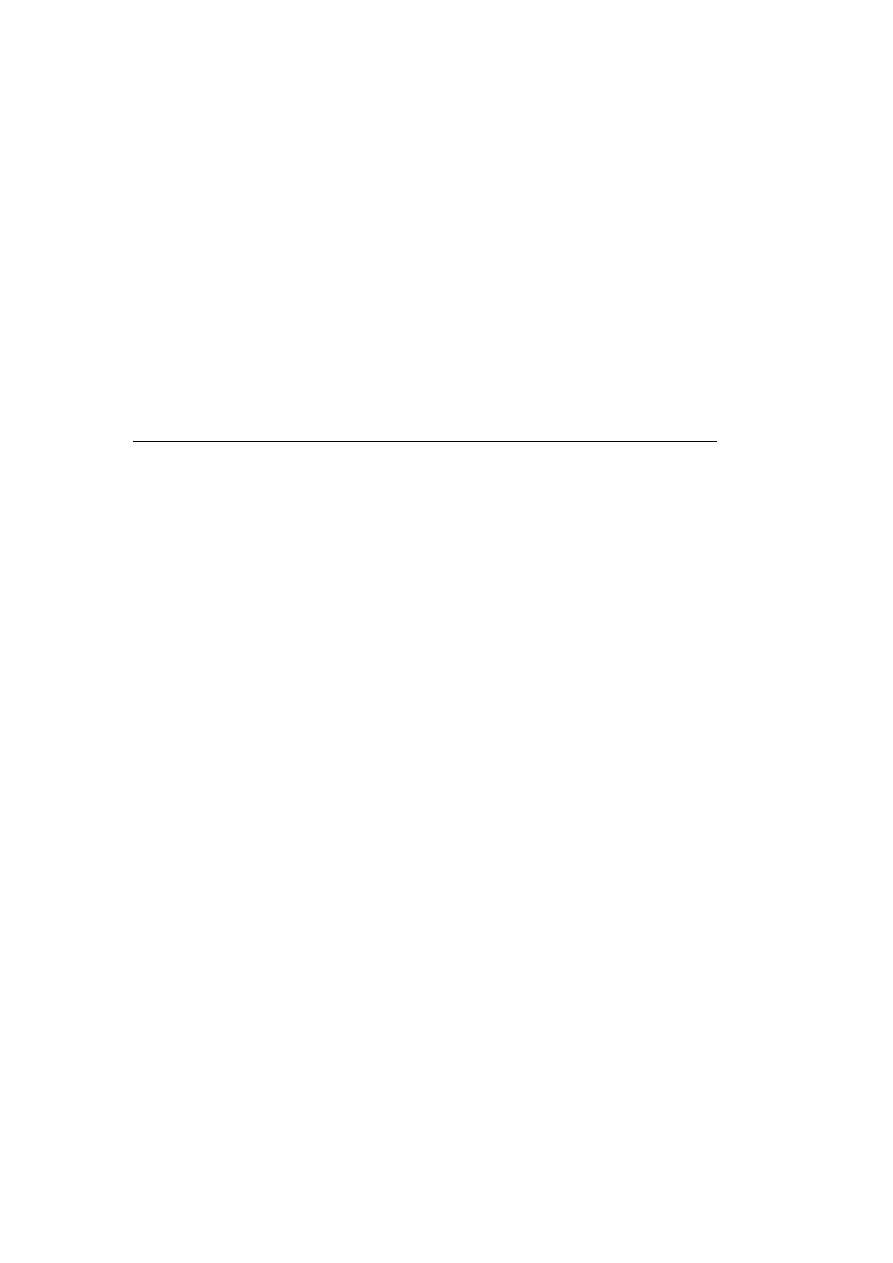
połączenia uzwojeń stojana w gwiazdę albo w trójkąt (rys. 3.).
Rys. 3. Schematy połączeń uzwojeń stojana: a) w gwiazdę, b) w trójkąt.
Oznaczenia na rys. 3:
U
1
, V
1
, W
1
– początki uzwojeń fazowych stojana,
U
2
, V
2
, W
2
–końce uzwojeń fazowych stojana,
U, V, W – zaciski łączeniowe (zewnętrzne) umieszczone na tabliczce
zaciskowej silnika.
Rozróżnia się dwa rodzaje silników indukcyjnych: klatkowe
i pierścieniowe - ze względu na sposób wykonania wirnika.
W silniku indukcyjnym klatkowym obwód elektryczny wirnika jest
wykonany z nieizolowanych prętów, połączonych po obu stronach wirnika
pierścieniami zwierającymi. Konstrukcja ta wyglądem przypomina klatkę
(rys. 4) o kształcie walca - stąd wzięła się nazwa tego silnika – silnik klatkowy.
a)
b)
Rys. 4. Budowa wirnika klatkowego: a) konstrukcja klatki, b) widok wirnika silnika.
7
Obwód magnetyczny wirnika wykonany jest w postaci pakietu blach
stalowych z dodatkiem krzemu, wzajemne odizolowanych.
Obwód elektryczny wirnika jest zawsze zwarty, stąd inna nazwa tego
silnika to silnik indukcyjny zwarty. Nie ma więc możliwości przyłączania
dodatkowych elementów do obwodu elektrycznego wirnika (taka możliwość
istnieje w wirniku silnika pierścieniowego). Klatka stanowi wielofazowe
uzwojenie wirnika, a za liczbę faz przyjmuje się liczbę prętów, z których jest
wykonana.
Zasada działania silnika asynchronicznego klatkowego trójfazowego.
Zasilanie silnika polega na dołączeniu trójfazowego napięcia przemiennego
do uzwojenia stojana, przez połączenie zacisków stojana U, V, W kolejno
z zaciskami fazowymi źródła napięcia trójfazowego (np. z zaciskami L
1
, L
2
, L
3
trójfazowej sieci zasilającej). W efekcie przepływu prądu trójfazowego
w uzwojeniach fazowych stojana, w przestrzeni wewnątrz stojana wzniecane
(wzbudzane) jest pole magnetyczne wirujące. Główną cechą takiego pola
magnetycznego jest stała wartość strumienia magnetycznego i zmieniający się
ze stałą prędkością kątową (obrotową) kierunek wektora strumienia
magnetycznego. Prędkość kątowa (obrotowa) wirowania pola magnetycznego
nazywa się prędkością synchroniczną.
Uzwojenia wirnika znajdują się w zmiennym (wirującym) polu
magnetycznym. W uzwojeniach wirnika (pomiędzy końcami) indukuje się
zmienna
siła
elektromotoryczna,
w
wyniku
zjawiska
indukcji
elektromagnetycznej. W zamkniętych obwodach wirnika płynie prąd indukcyjny
(pod wpływem indukowanej siły elektromotorycznej) – stąd nazwa - silnik
indukcyjny.
Przewody wirnika, w których płynie prąd, znajdują się w polu
magnetycznym.
W
takich
warunkach
na
przewody
działa
siła
elektrodynamiczna. Kierunek siły jest styczny do obwodu wirnika. Taka siła

8
tworzy moment siły nazywany momentem elektromagnetycznym silnika.
Moment ten powoduje ruch obrotowy wirnika wokół własnej osi w przypadku,
gdy moment oporowy (obciążenia) na wale silnika – przeciwdziałający ruchowi
– jest mniejszy od momentu elektromagnetycznego silnika. Gdy w czasie ruchu
wirnika zrównają się wartości momentu elektromagnetycznego i momentu
oporowego, wirnik będzie wirował ze stałą prędkością kątową.
W idealnych warunkach, gdyby nie było żadnego momentu oporowego,
wirnik osiągnąłby prędkość równą wartości prędkości wirowania pola, a więc
prędkości synchronicznej. W takim przypadku uzwojenie wirnika byłoby
nieruchome względem wirującego pola elektromagnetycznego wywołanego
przez prądy uzwojenie stojana, a więc nie występowałoby przecinanie prętów
klatki przez linie pola stojana, nie płynęłyby w nich prądy i nie powstałby
moment elektromagnetyczny. Sytuacja taka nie jest jednak możliwa
w rzeczywistym silniku indukcyjnym, ponieważ zawsze występuje jakiś
moment obciążenia (moment tarcia w łożyskach czy oporów powietrza). Zatem
wirnik osiąga prędkość mniejszą od prędkości synchronicznej - zwykle niewiele
- odpowiadającą jednakowym wartościom momentu elektromagnetycznego
silnika i momentu obciążenia. Wirnik samodzielnie nigdy nie osiągnie prędkości
synchronicznej, to znaczy zawsze wiruje z prędkością asynchroniczną, której
silnik indukcyjny zawdzięcza swoją drugą nazwę silnika asynchronicznego.
Zwrot prędkości kątowej (obrotowej) wirnika silnika indukcyjnego jest
zgodny ze zwrotem prędkości kątowej (potocznie z kierunkiem wirowania) pola
elektromagnetycznego (magnetycznego) wzniecanego przez prądy uzwojenia
stojana. Zwrot prędkości kątowej wirowania pola magnetycznego stojana, przy
określonym rozmieszczeniu uzwojeń fazowych (U, V, W) na obwodzie stojana,
zależy tylko od kolejności faz napięcia zasilającego (U
L1
, U
L2
, U
L3
) dołączonych
do zacisków łączeniowych uzwojeń stojana silnika (U, V, W).
9
Zmiana kierunku wirowania (zwrotu prędkości kątowej) wirnika silnika
sprowadza się więc do zmiany kierunku wirowania (zwrotu prędkości kątowej)
pola elektromagnetycznego wzniecanego przez prądy uzwojeń stojana
w szczelinie pomiędzy stojanem i wirnikiem. Praktycznie, zmianę taką uzyskuje
się przez zamianę (pomiędzy sobą) dołączenia dwóch faz napięcia zasilającego
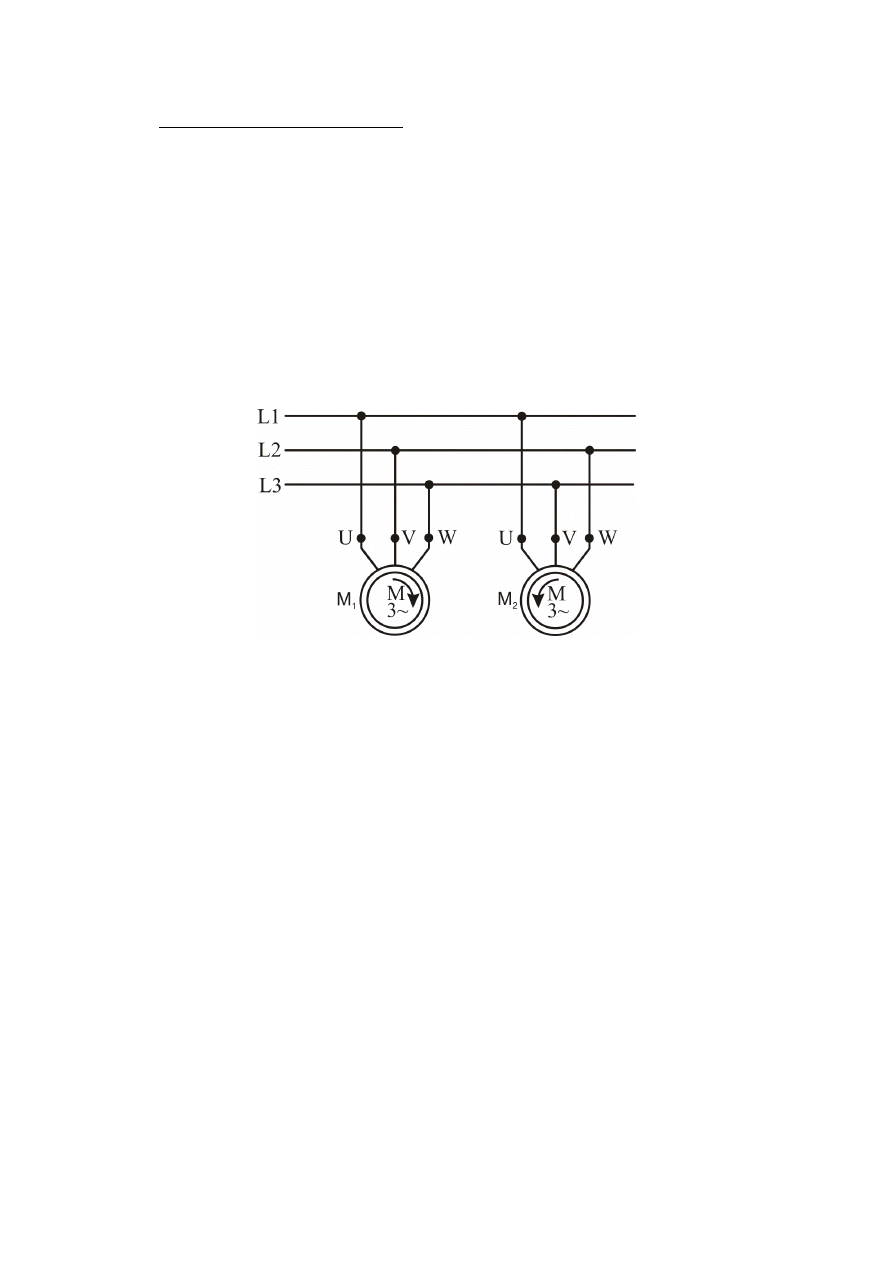
do dwóch zacisków uzwojeń stojana. Na rys. 5 przedstawiony jest schemat
zasilania dwóch silników M
1
i M
2
z jednego źródła trójfazowego (z sieci), np.
gdy silnik M
1
wiruje
w prawo, to silnik M
2
wiruje w lewo.
Rys. 5. Schemat zasilania dwóch silników trójfazowych zapewniającego
wirowanie silników w przeciwnych kierunkach.
2. Budowa i zasada działania stycznika elektromagnetycznego.
Stycznik jest to łącznik mechanizmowy przestawiany w sposób inny niż
ręczny, służący do zdalnego załączania, przewodzenia i wyłączania prądów
w normalnych warunkach pracy obwodu jak i przy przeciążeniach mogących
występować w roboczych warunkach pracy. Styczniki elektromagnetyczne
produkowane są na prąd stały i prąd przemienny. Są to urządzenia o dużej
częstotliwości łączeń. Styki ruchome stycznika mają tylko jedno położenie
spoczynkowe zwane stanem normalnym. Stan ten występuje w momencie kiedy
cewka stycznika nie jest zasilana i dla takiego stanu rysowane są wszystkie
schematy zestyków. Po zasileniu cewki stycznika zestyki znajdują się w stanie
wymuszonym i są utrzymywane przez elektromagnes. Zatem zestyki normalnie
otwarte, czyli zwierne nazywane także czynnymi lub załączającymi są otwarte
10
w stanie beznapięciowym cewki. Zestyki normalnie zamknięte, czyli rozwierne
nazywane również biernymi lub rozłącznymi na schematach rysowane są
zawsze jako zwarte.
W budowie stycznika można wyodrębnić następujące części główne
(rys. 6): podstawa lub obudowa stycznika, zestyki główne, zestyki pomocnicze
(obwodu sterującego), układ elektromagnesu z cewką indukcyjną i sprężyną,
komory gaszące łuk elektryczny.
Zestyki (styki) główne – przeznaczone są do łączenia obwodów o dużych
natężeniach prądów. Zestyki (styki) pomocnicze (sterujące) – przeznaczone są
do łączenia obwodów o niewielkich natężeniach prądów.
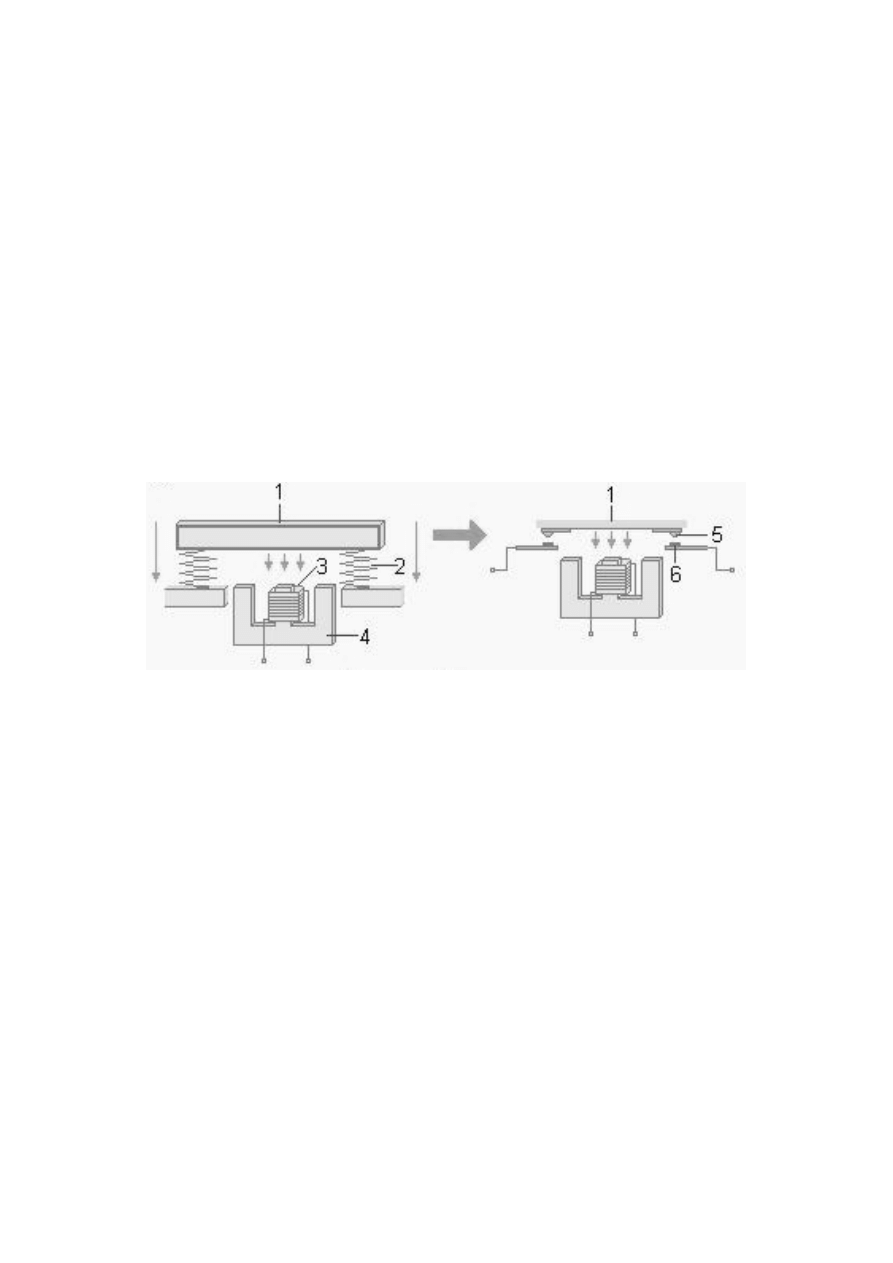
Rys. 6. Uproszczona budowa i zasada działania stycznika elektromagnetycznego: 1-ruchoma
część rdzenia elektromagnesu; 2-sprężyna; 3-cewka stycznika: 4-nieruchoma część rdzenia
elektromagnesu; 5-styk ruchomy; 6-styk stały.
3. Przekaźnik elektromagnetyczny.
Przekaźniki elektromagnetyczne działają na zasadzie elektromagnesu:
prąd płynący w cewce przekaźnika wywołuje pole magnetyczne przyciągające
żelazną kotwiczkę, która zamyka (lub otwiera) odpowiedni styk lub grupę
styków ruchomych. W przekaźniku wszystkie styki (zestyki) przeznaczone są do
łączenia obwodów o niewielkich natężeniach prądów. Nie ma wyróżnionych
styków głównych.
11
IV. OPIS STANOWISKA LABORATORYJNEGO
Stanowisko laboratoryjne składa się z:
1. Modelu suportu z zamontowanymi na nim czterema wyłącznikami
krańcowymi.
2. Trójfazowego silnika klatkowego o następujących danych znamionowych:
1,1kW, /Y 230/400V, 50Hz, 5,50/3,20A, 900obr/min, napędzającego
śrubę suportu.
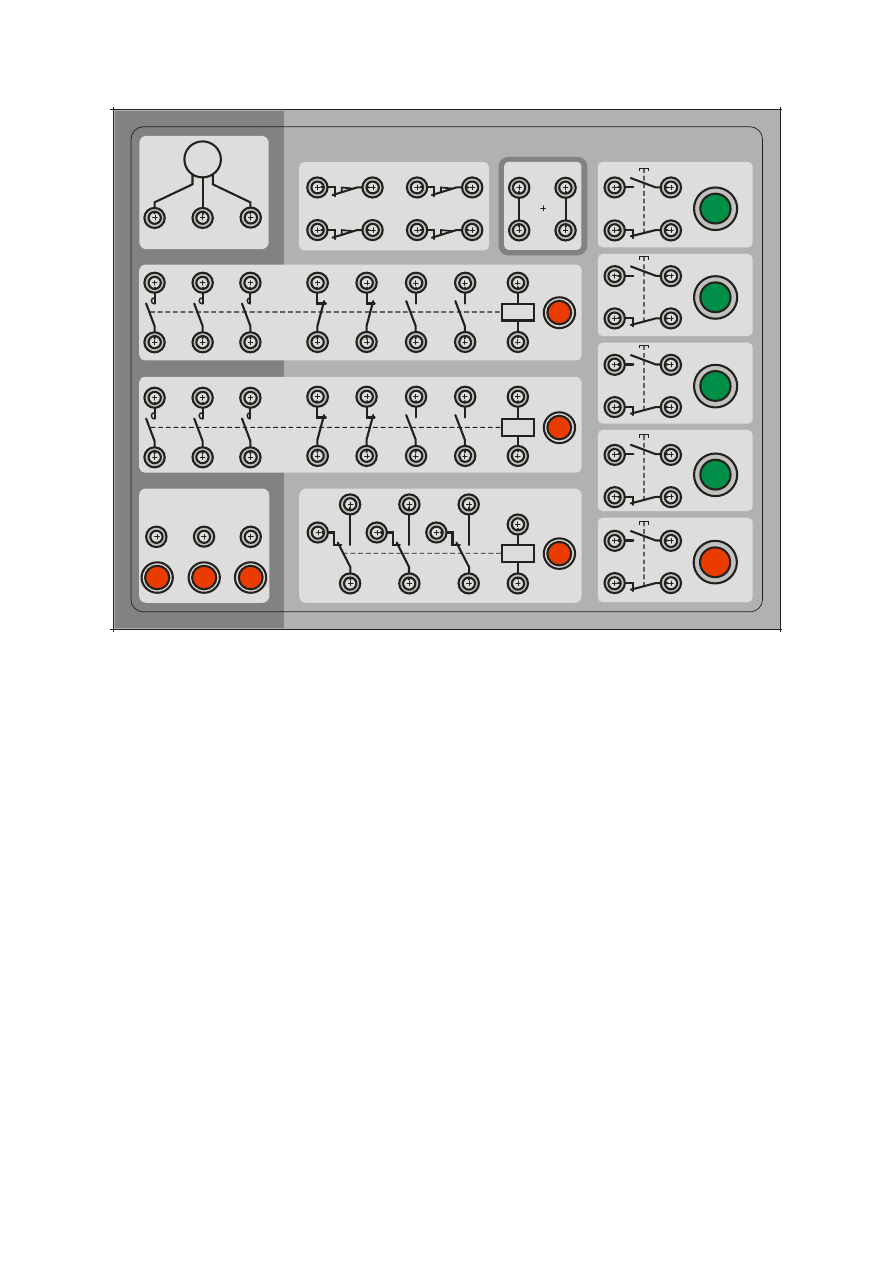
3. Skrzynki sterowniczej, w której zamontowano:
- stycznik główny z wyprowadzonymi zaciskami laboratoryjnymi L1, L2,
L3,
- transformator toroidalny 230/24 [V] z wyprowadzonymi zaciskami
laboratoryjnymi uzwojenia wtórnego oznaczonymi 0V i 24V~ (będący
źródłem zasilania budowanych w ramach ćwiczenia układów
sterowania),
- wyprowadzone zaciski laboratoryjne uzwojeń stojana silnika U, V, W,
- dwa styczniki 1S, 2S z wyprowadzonymi: zaciskami laboratoryjnymi
zestyków głównych, zaciskami zestyków sterowniczych (2 zwierne,
2 rozwierne), zaciskami cewek ~24V 50Hz połączonych z lampkami
sygnalizującymi działanie styczników,
- przekaźnik pomocniczy PP z wyprowadzonymi: zaciskami zestyków
(3 zestyki przełączalne zwierno-rozwierne), zaciskami cewki ~24V 50Hz
połączonej z lampką sygnalizującą działanie przekaźnika,
- przyciski sterujące ręczne o sile zwrotnej wyposażone w zespoły styków
sprzężonych mechanicznie załączająco-wyłączających (styki zwierne
i rozwierne) oznaczone na pulpicie: 1Z, 2Z, 1P, 2P i W (oznaczenia
przycisków wynikają z funkcji pełnionych w układzie sterowania),
- zaciski zestyków rozwiernych czterech wyłączników krańcowych
1WK÷4WK.
12
L1
STEROWANIE NAWROTEM SILNIKA TRÓJFAZOWEGO
1Z
L2
L3
M
3
~
2Z
1P
2P
W
24V~
0V
1S
2S
PP
U
V
W
24V
~
24V
~
24V
~
1WK
3WK
4WK
2WK
Rys. 7. Widok płyty czołowej skrzynki sterowniczej.
V. PROGRAM ĆWICZENIA
1. Zapoznać się ze stanowiskiem przez sprawdzenie i ustalenie :
-
napięć znamionowych cewek styczników i przekaźnika pomocniczego,
-
liczby i rodzaju zestyków styczników, przekaźnika, wyłączników
krańcowych i przycisków sterujących,
-
napięcia znamionowego silnika i sposobu połączenia jego uzwojeń na
czas pracy.
2. Połączyć układ sterowania według rys. 8, rys. 9, lub rys. 10 z wykorzystaniem
elementów wymienionych w opisie stanowiska laboratoryjnego.
3. Po sprawdzeniu poprawności połączenia układu przez prowadzącego
ćwiczenia uruchomić układ i sprawdzić prawidłowość jego działania.
13
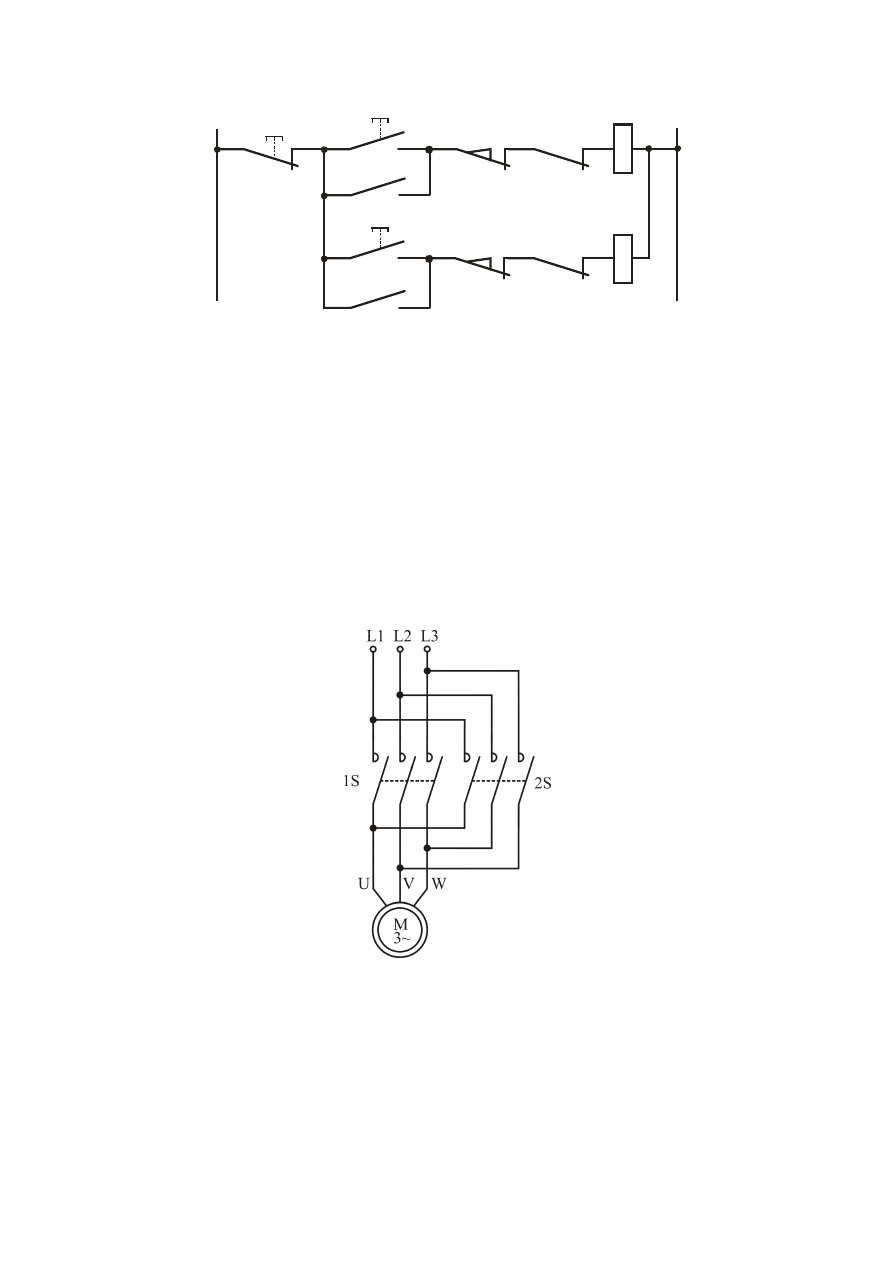
Ręczne sterowanie pracą nawrotną silnika
a)
b)
0V
24V~
W
1Z
1S1
1S2
2S2
2S1
2Z
1S
2S
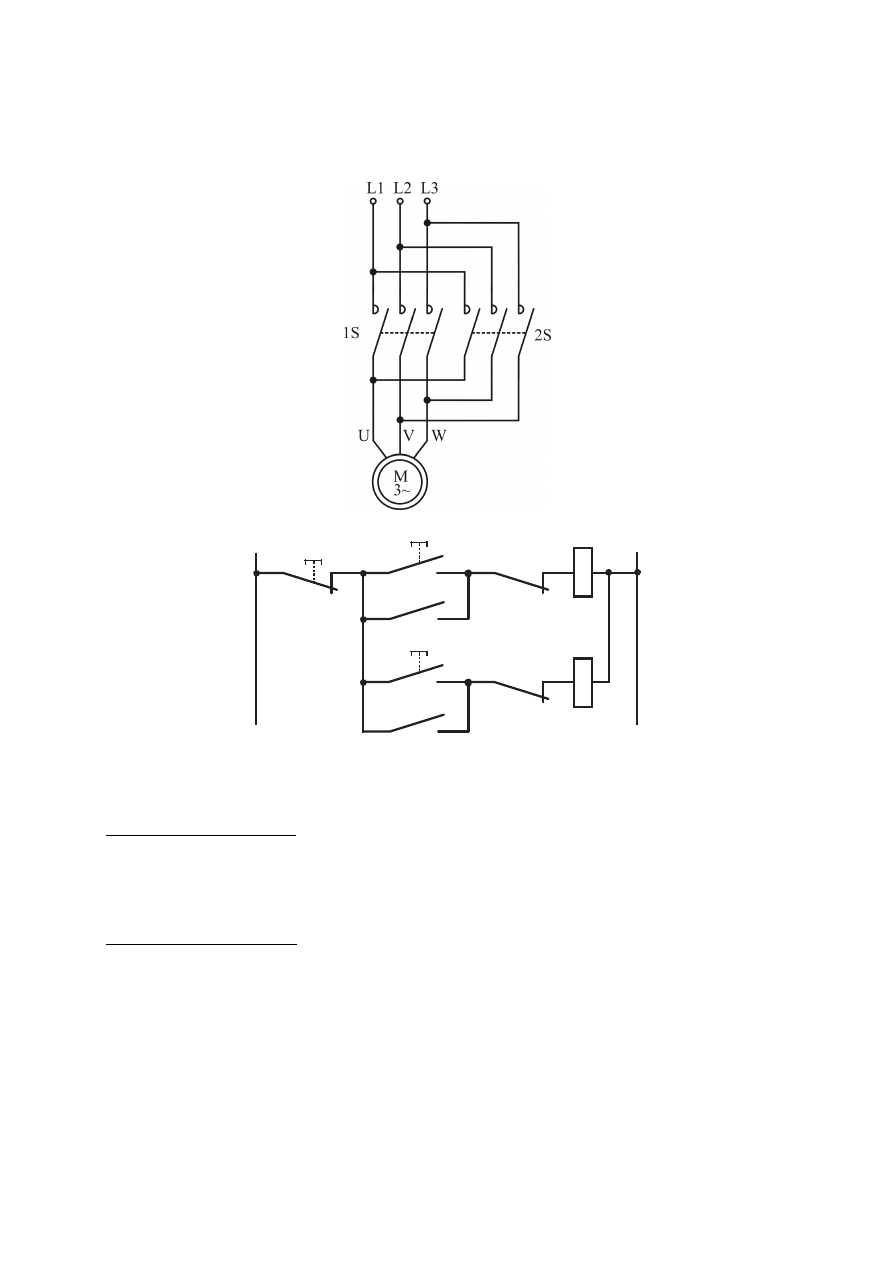
Rys. 8. Schemat układu sterowania ręcznego pracą nawrotną silnika: a) obwód prądowy,
b) obwód sterowania.
Oznaczenia na rys. 8a:
1S i 2S – zestyki główne styczników trójbiegunowych;
M3~ – trójfazowy silnik klatkowy;
Oznaczenia na rys. 8b:
W – przycisk ręczny wyłączający, o sile zwrotnej;
1Z i 2Z – przyciski ręczne załączające, o sile zwrotnej;
1S i 2S – cewki styczników odpowiednio 1S i 2S;
1S
1
i 2S
1
– zestyki sterownicze zwierne styczników odpowiednio 1S i 2S;
1S
2
i 2S
2
– zestyki sterownicze rozwierne styczników odpowiednio 1S i 2S.

14
Działanie układu
Po naciśnięciu na przycisk 1Z zostaje włączony stycznik 1S, zamykają się
zestyki główne 1S i silnik zaczyna obracać się, np. w prawo. Jednocześnie
zamyka się zestyk sterowniczy zwierny 1S
1
, który utrzymuje stycznik 1S
w stanie załączonym po zwolnieniu przycisku 1Z oraz otwiera się zestyk
sterowniczy 1S
2
uniemożliwiając zadziałanie stycznika 2S i włączenie silnika
w lewo.
Silnik zatrzymuje się po naciśnięciu przycisku W. Jeżeli po zatrzymaniu
silnika naciśniemy na przycisk 2Z, to spowodujemy włączenie stycznika 2S,
zamknięcie się zestyków głównych 2S i wirowanie silnika w lewo.
Podtrzymanie pracy stycznika 2S odbywa się teraz przez zestyk 2S
1
, a przed
możliwością włączenia silnika w prawo zabezpiecza zestyk 2S
2
.
Uwaga! Zmianę kierunku wirowania uzyskano przez „skrzyżowanie” faz L2
i L3 (patrz obwód prądowy) w doprowadzeniu napięć do stojana silnika.
W obrabiarkach wprowadza się wyłączniki krańcowe, które zabezpieczają
przed zbytnim przesunięciem, np. suportu w lewo i prawo. Przykład takiego
układu podano na rys. 9 (obwód prądowy silnika jak na rys. 8a).
Układ działa tak jak poprzedni z tym, że z chwilą gdy suport znajdzie się np.
w prawym skrajnym położeniu, to zderzak naciśnie na wyłącznik krańcowy
1WK, co spowoduje otwarcie jego styku, obwód cewki 1S zostanie przerwany
i silnik zatrzyma się.
15
0V
24V~
W
1WK
2WK
1Z
1S1
1S2
2S2
2S1
2Z
1S
2S
Rys. 9. Schemat ideowy układu sterowania ręcznego pracą nawrotną silnika z zastosowaniem
wyłączników krańcowych; 1WK i 2WK – wyłączniki krańcowe rozwierne o sile
zwrotnej, pozostałe oznaczenia jak na rys. 8b.
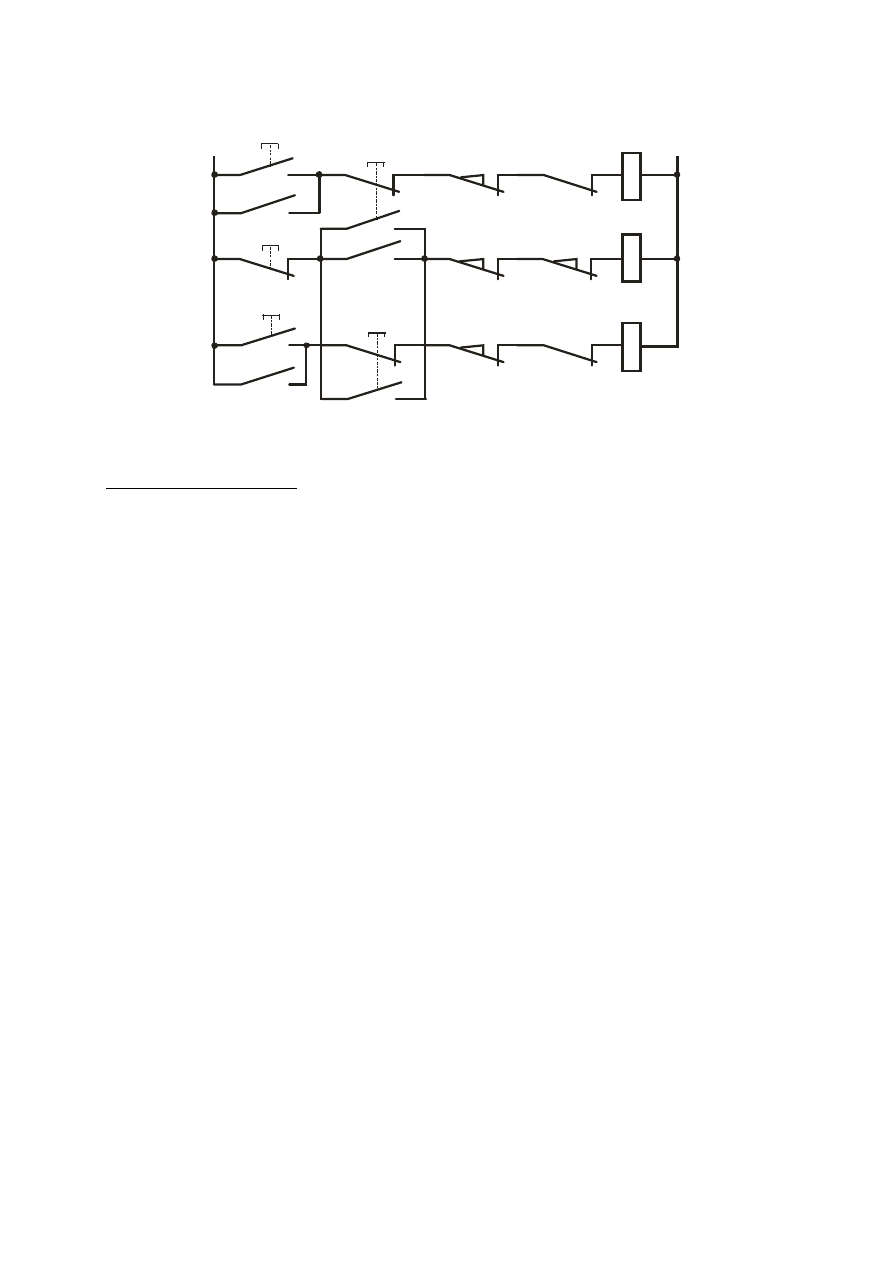
Automatyczne sterowanie pracą nawrotną silnika
Układ automatycznego sterowania pracą nawrotną został zrealizowany
w zastosowaniu do suportu obrabiarki. Schemat ideowy sterowania takim
układem przedstawiony został na rys. 10.
a)
16
b)
0V
24V~
W
1WK
2WK
3WK
1P
1Z
2S1
4WK
2P
2Z
1S1
1S
2S
PP
PP1
PP2
PP3
Rys. 10. Schemat ideowy układu sterowania automatycznego pracą nawrotną silnika
trójfazowego: a) obwód prądowy, b) obwód sterowania.
Oznaczenia na rys. 10:
PP – cewka przekaźnika pomocniczego,
PP
1
, PP
2
, PP
3
– zestyki przekaźnika PP,
1P, 2P – przyciski ręczne o sile zwrotnej,
3WK, 4WK – wyłączniki krańcowe o sile zwrotnej.
Pozostałe oznaczenia jak na rys. 8b.
Działanie układu
Naciśnięcie przycisku 1Z zamyka obwód cewki stycznika 1S, zatem
załącza silnik co powoduje ruch suportu np. w prawo, naciśnięcie przycisku 2Z
powoduje ruch suportu w lewo. Praca silnika ustaje z chwilą zwolnienia
przycisku 1Z lub 2Z. Wyłączniki krańcowe 1WK i 2WK zabezpieczają przed
przesunięciem suportu poza położenia ustalone. Rola wyłączników 3WK i 4WK
zostanie omówiona dalej.
Naciśnięcie przycisku 1P lub 2P zapoczątkowuje pracę suportu
z automatycznym nawrotem. Działanie na przycisk 1P spowoduje, że jego część
zwierna załączy cewkę przekaźnika PP, którego zestyk zwierny PP
2
zbocznikuje
przycisk 1P i utrzyma przekaźnik pod napięciem aż do naciśnięcia przycisku
W lub dojścia zderzaka do jednego z wyłączników krańcowych 3WK lub 4WK.

17
Jednocześnie zamkną się zestyki zwierne PP
1
i PP
3
. Zestyk czynny PP
3
włączy
stycznik 2S, natomiast zestyk PP
1
nie włączy stycznika 1S, ponieważ obwód
jego cewki jest w tym czasie przerwany przez naciśnięty przycisk 1P. Gdy tylko
stycznik 2S zadziała, otworzy się jego zestyk pomocniczy rozwierny 2S
1
uniemożliwiający załączenie stycznika 1S (inaczej obwód cewki stycznika
zamknąłby się z chwilą ustania nacisku na 1P). Suport rusza np. w lewo. Gdy
w ruchu tym zderzak naciśnie na wyłącznik krańcowy 2WK otwierając jego
zestyk, obwód cewki stycznika 2S zostanie przerwany i styk ruchomy stycznika
powróci do stanu spoczynku, zestyk pomocniczy rozwierny 2S
1
zamknie się
włączając stycznik 1S. Suport rusza w prawo, wkrótce potem zamknie się zestyk
2WK, ale nie włącza się przez to stycznik 2S ponieważ zestyk pomocniczy 1S
1
jest otwarty. Po dojściu suportu do wyłącznika 1WK zostaje odłączony stycznik
1S, a włączony stycznik 2S. Cykl będzie powtarzał się do chwili naciśnięcia na
przycisk W.
Jeśli na początku naciśniemy na przycisk 2P, otrzymamy również ruch
z automatycznym nawrotem z tą różnicą, że rozpocznie się on od ruchu suportu
w kierunku przeciwnym niż przy naciskaniu na przycisk 1P. Rola wyłączników
krańcowych 3WK i 4WK polega na dodatkowym zabezpieczaniu przed
niewłaściwym połączeniem układu. Gdyby np. zamieniono przez pomyłkę rolę
wyłączników krańcowych 1WK i 2WK przy przyporządkowanym już
odpowiednim kierunku wirowania silnika, to przy naciskaniu przycisków 1P
i 2P mimo, że styki wyłącznika krańcowego zostaną rozwarte, suport posuwałby
się dalej w poprzednim kierunku. Doprowadziłoby to zapewne do zniszczenia
suportu lub silnika. W układach praktycznych, połączonych na stałe, wyłączniki
3WK i 4WK są zbędne.
VI. WYMAGANIA BHP
Porządek na stanowisku laboratoryjnym oraz przygotowanie studentów do
zajęć jest podstawą bezpiecznej pracy. Łączenia obwodów elektrycznych należy

18
dokonywać w stanie beznapięciowym Po zakończeniu łączenia niewykorzystane
przewody należy powiesić na wieszaku na przewody.
Przy
stanowisku
badawczym
środkiem
dodatkowej
ochrony
przeciwporażeniowej jest izolowanie stanowiska ze względu na dostępne części
czynne obwodu elektrycznego o napięciu przekraczającym napięcie bezpieczne.
Dlatego łączenia, przełączania i zmian w układzie sterowania można dokonywać
tylko przy wyłączonej sieci zasilającej na danym stanowisku.
W celu uniknięcia porażenia prądem elektrycznym osoby wykonujące
ćwiczenia powinny w czasie uruchamiania układu sterowania zachować
odpowiednie oddalenie od części czynnych (będących pod napięciem).
VII. PRZYKLADOWE PYTANIA SPRAWDZAJĄCE
1. Opisz budowę i zasadę działania silnika asynchronicznego klatkowego.
2. Opisz sposób zmiany kierunku wirowania wirnika silnika indukcyjnego
klatkowego.
3. Opisz budowę i zasadę działania stycznika o napędzie elektromagnetycznym.
4. Na podstawie wybranego przez prowadzącego schematu opisz zasadę
działania sterowania stycznikowego.
VIII. LITERATURA
1. Misiurewicz E., Mystkowski A.: Napęd i sterowanie elektryczne obrabiarek.
PWT, W-wa, 1995.
2. Praca zbiorowa pod red. F. Przezdzieckiego: Laboratorium elektrotechniki
i elektroniki. PWN, W-wa, 1982.
3. Praca zbiorowa pod red. W. Pietrzyka: Laboratorium z elektrotechniki
i elektroniki. Wyd. Uczelniane Polit. Lubelskiej, 1994.
4. Drozdowski P. : Wprowadzenie do napędów elektrycznych. Skrypt dla
studentów wyższych szkół technicznych. WPK, Kraków 1998.
5. Norma PN-EN 60947-1 lipiec 2006
6. http://silnikielektryczne.prv.pl/html/asynchroniczne.html
Wyszukiwarka
Podobne podstrony:
sterowanie nawrotu
02 3b Kasety sterownicze XAC Ai Nieznany (2)
Hamowanie LOGO sterowanie id 19 Nieznany
STEROW-NAWROTNE SIL-INDUK stycznik-przek
cw 5 sterowanie odbiornikiem hy Nieznany
dokumentacja sterownika id 4722 Nieznany
sterowanie nawrotem ze zderzakiem
1 Identyfikacja obiektow sterow Nieznany (2)
KOMPUTEROWE SYSTEMY STEROWANIA Nieznany
protokol 3m id 402716 Nieznany
ML6 Sterownosc statyczna id 303 Nieznany
automatyka i sterowanie wyklad Nieznany (8)
automatyka i sterowanie wyklad Nieznany (2)
7 Sterowanie logiczne na bazie Nieznany
PKP Sterowanie Napieciem id 360 Nieznany
Instrukcja obslugi sterownikow Nieznany
automatyka i sterowanie wyklad Nieznany (7)
Frezer obrabiarek sterowanych n Nieznany
więcej podobnych podstron