1
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Modelowanie i symulacja
dr inż. Piotr Piela
Zakład Metod Matematycznych
kontakt: pokój 28
ppiela@wi.ps.pl
2
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – sposoby opisu
Nieliniowe systemy dynamiczne:
opis
zależności
wejście-wyjście
za
pomocą
równań
różniczkowych,
opis za pomocą równań stanu.
Liniowe systemy dynamiczne:
opis zależności „wejście-wyjście” za pomocą równań
różniczkowych,
opis za pomocą równań stanu,
opis zależności „wejście-wyjście” w formie operatorowej
3
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Rachunek operatorowy
Operatory
odwzorowują wielkości wejściowe, będące funkcjami np.
czasu – w inne funkcje czasu – reprezentujące wielkości wyjściowe.
Posługiwanie się operatorami ułatwia obliczenia, gdyż pozwala
operacje na funkcjach zastąpić operacjami na liczbach.
4
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
Przekształcenie Laplace'a
jest operatorem przekształcającym
funkcję zmiennej rzeczywistej f(t) na pewną funkcję F(s) zmiennej
zespolonej s = c + j
ω
zgodnie ze wzorem:
L
[ f t]=F s=
∫
0
∞
x
t⋅e
−st
dt
Odwrotne przekształcenie Laplace'a
– znając transformatę
funkcji F(s) możemy wyznaczyć samą funkcję f(t) za pomocą
wzoru:
f
t =L
−1
[ F s]=
1
2
j
∫
c
− j ∞
c
j ∞
F
s⋅e
st
ds ,
t0 ,
c = Re s
5
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
L
[ f t ]=F s=
∫
0
∞
f
t ⋅e
−st
dt
F(s) – obraz Laplace'a funkcji f(t),
f(t) – oryginał – funkcja spełniająca następujące warunki:
●
funkcja f(t) jest ciągła dla wszystkich wartości t,
●
funkcja f(t) musi spełniać warunek
●
wartości funkcji f(t) muszą być ograniczone, zawsze można
określić dwie liczby M > 0 i
α
≥ 0, że spełniona jest równość:
f
t =0 ;∀ t0
f
t Me
t
;
∀ t0
6
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
Właściwości transformaty Laplace'a:
addytywność i liniowość - przekształcenie Laplace'a spełnia
zasadę superpozycji,
L
[af
1
tb f
2
t ]=aL[ f
1
t ]bL[ f
2
t]=aF
1
sbF
2
s
skalowanie (a – liczba rzeczywista, dodatnia),
L
[ f at ]=
1
a
F
s
a
F
as=
1
a
L
[
f
t
a
]
tłumienie oryginału (b – dowolna liczba zespolona),
L
[
e
−bt
f
t
]
=F sb
7
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
przesunięcie w prawo o a (a – liczba rzeczywista, dodatnia),
L
[ f t−a]=e
−as
F
s
przesunięcie w lewo o a (a – liczba rzeczywista, dodatnia),
L
[ f ta]=e
as
[
F
s−
∫
0
a
f
t ⋅e
−st
dt
]
8
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
różniczkowanie oryginału,
L
[ f ' t]=sF s− f 0 ,
f
0= lim
t
0
f
t
L
[ f ' ' t ]=s
2F
s− f 0 s− f ' 0
całkowanie oryginału,
L
[
∫
0
t
f
d
]
=
F
s
s
9
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
różniczkowanie obrazu,
L
[t⋅f t ]=−
d
ds
F
s
całkowanie obrazu,
L
[
1
t
f
t
]
=
∫
s
∞
F
zdz
10
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
transformata splotu
L
[ f
1
t ∗ f
2
t ]=F
1
s⋅F
2
s
f
1
t ∗ f
2
t=
∫
0
t
f
1
z⋅f
2
t−zdz
F
s=F
1
s⋅F
2
s
f
1
t =L
−1
[ F
1
s]
f
2
t =L
−1
[ F
2
s]
f
t = f
1
t ∗ f
2
t
11
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
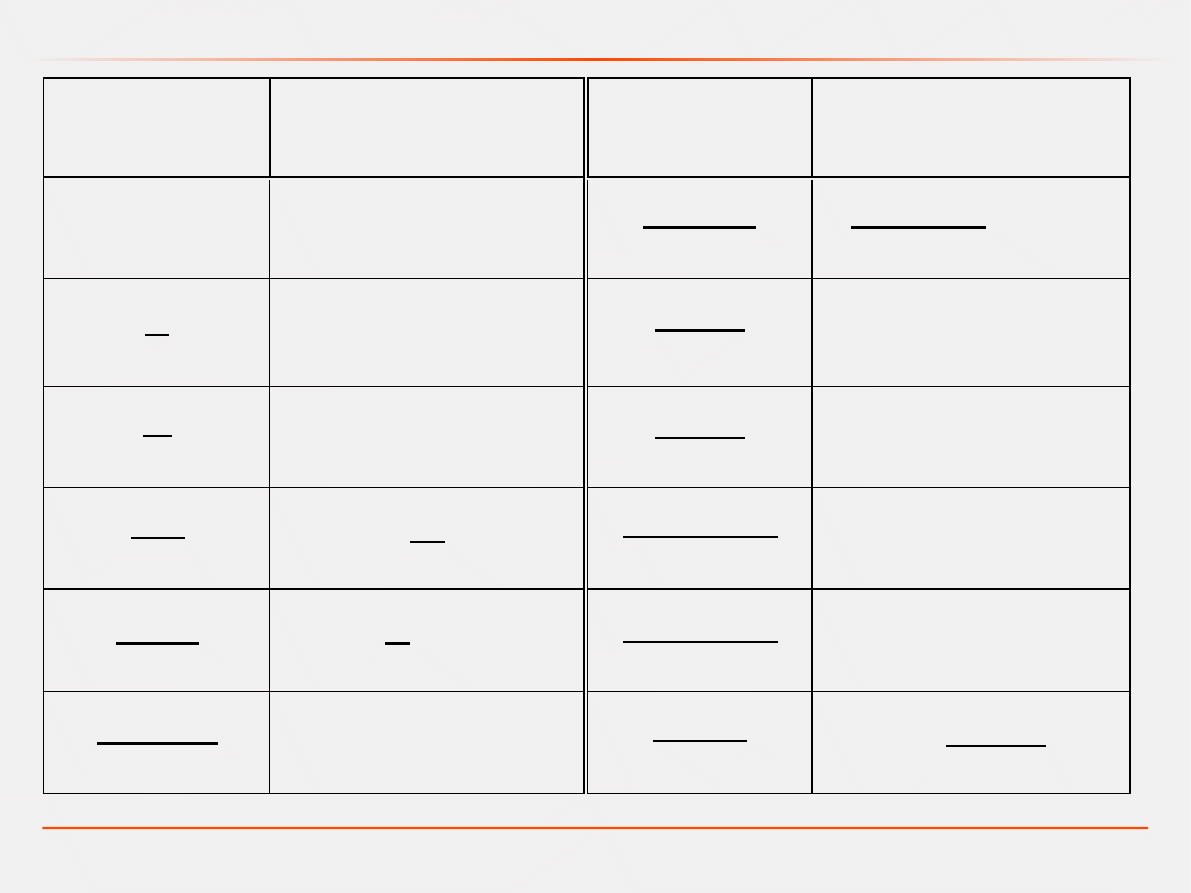
F(s)
f(t)
F(s)
f(t)
1
t; impuls Diraca
1
1sT
n
1
1−n! T
n
t
n
−1
e
−t/T
1
s
1
t
=
{
0 ; t
0
1; t
≥0
s
s
2
2
cos
t
1
s
2
t
s
2
2
sin
t
1
s
n
1
t
n
n !
s
a
sa
2
2
e
−at
cos
t
1
1
sT
1
T
e
−t/T
sa
2
2
e
−at
sin
t
1
s
1sT
1
−e
−t/T
1
sa
n
e
−at
t
n
−1
n−1!
12
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
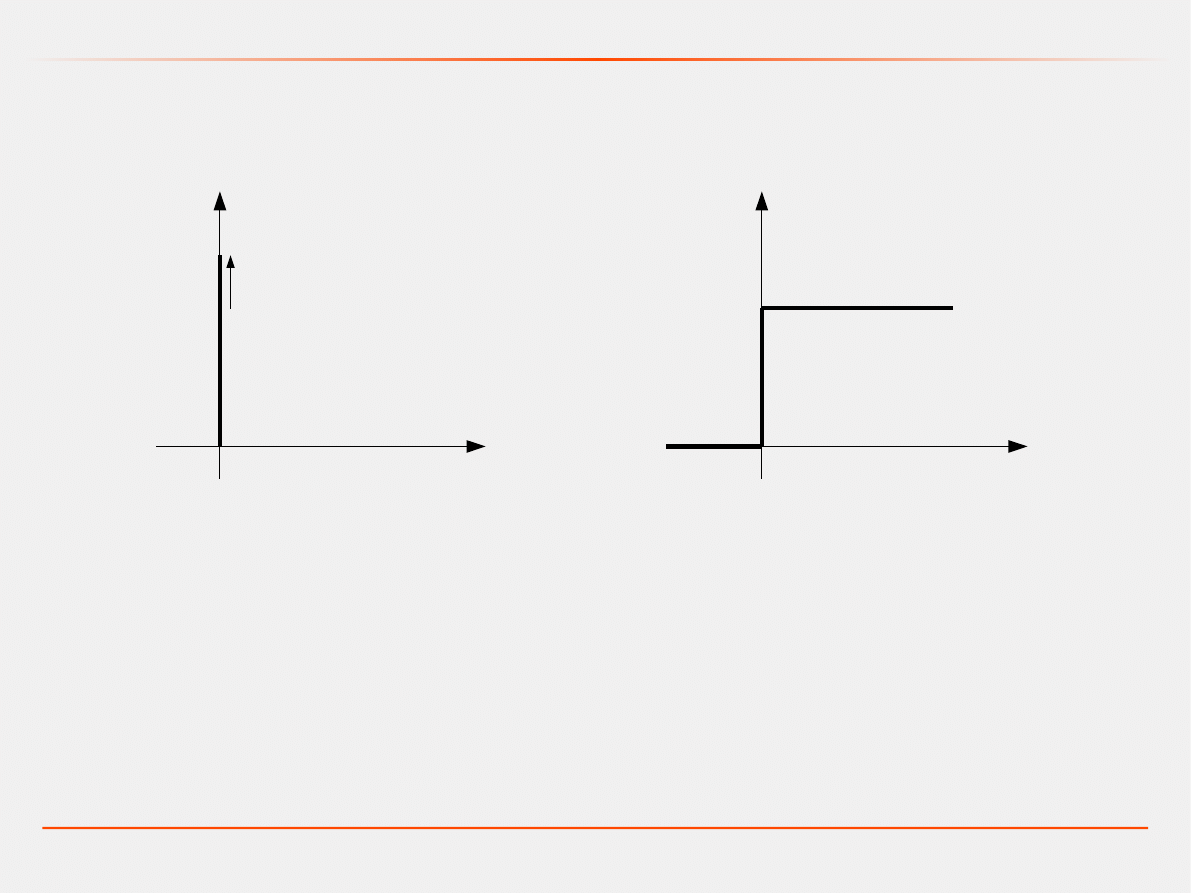
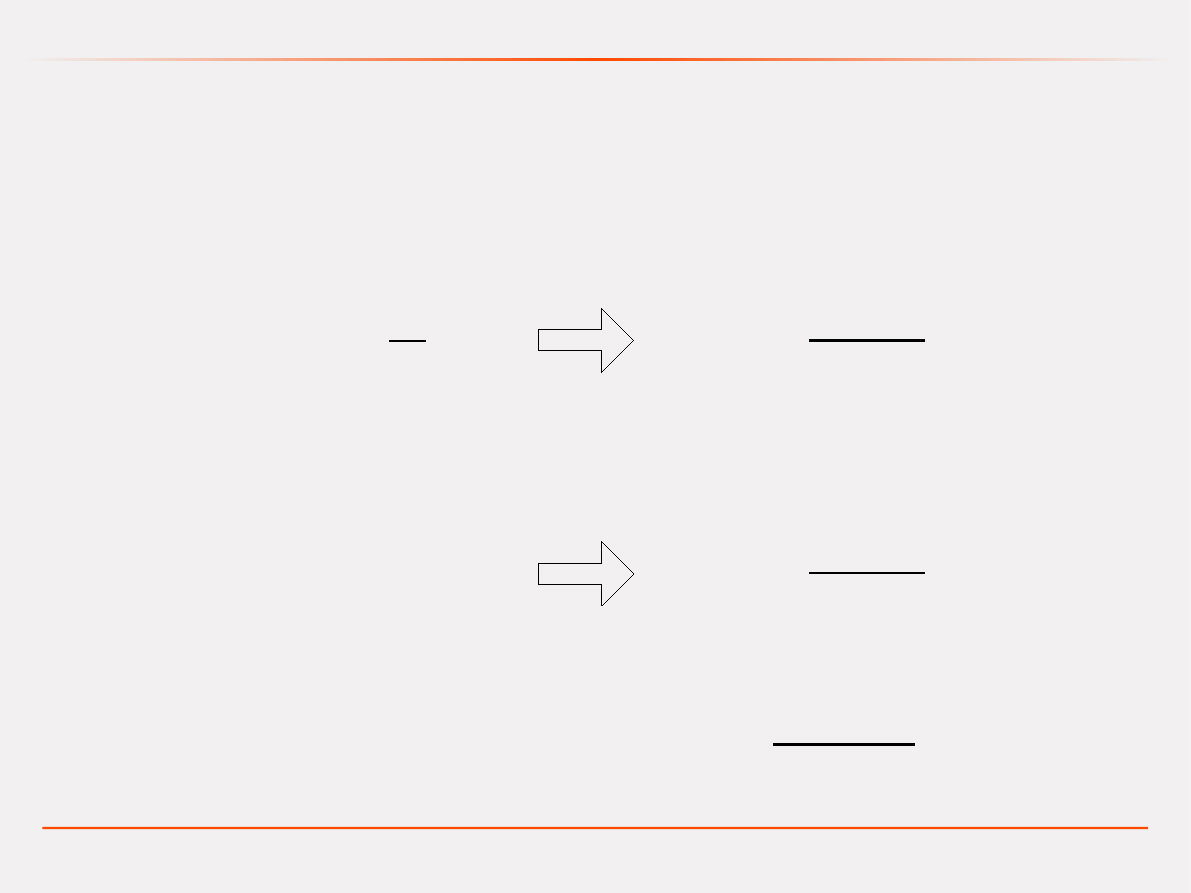
t
t
∞
Impuls Diraca
t
1
t
1
Skok jednostkowy
1
t=
{
0 ; t
0
1 ; t
≥0
t =
{
0 ; t
≠0
∞ ; t=0
13
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
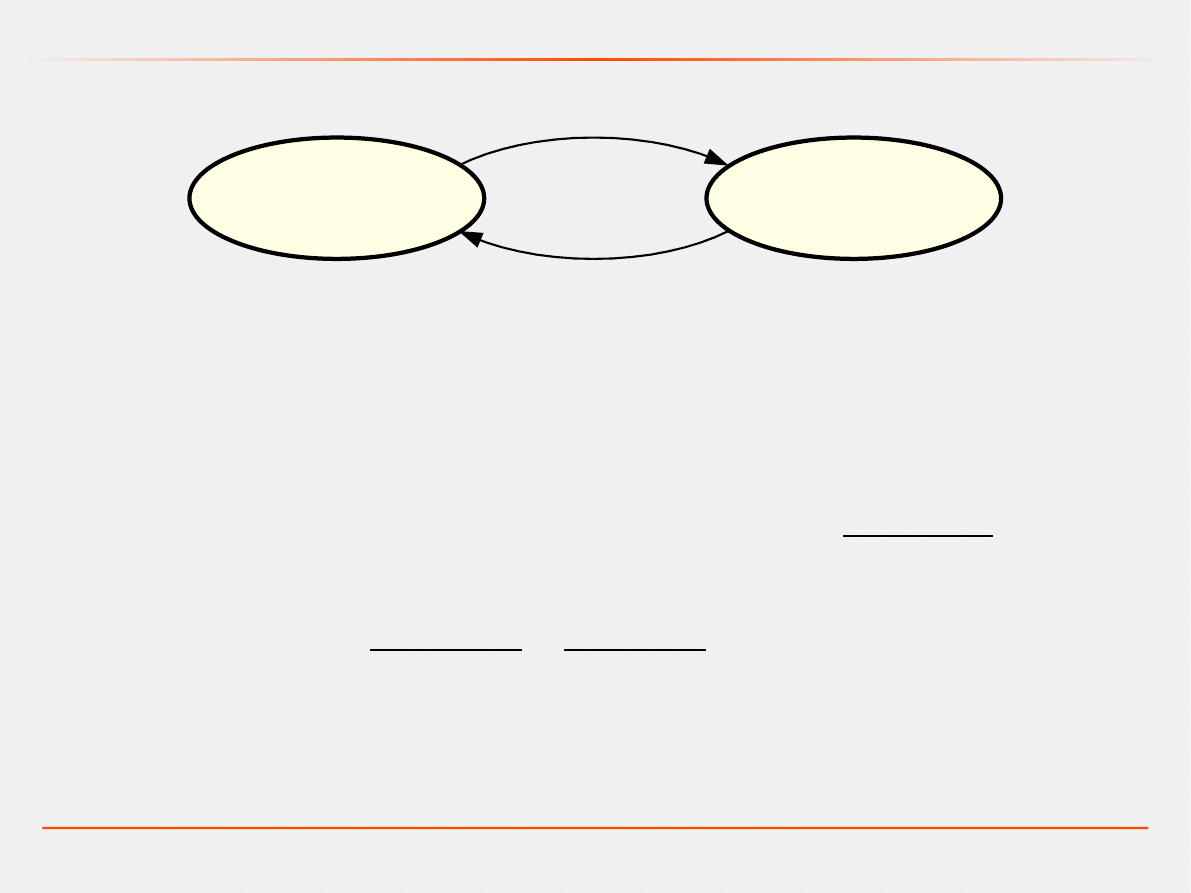
Przekształcenie Laplace'a
f(t)
F(s)
L[f(t)]
L
-1
[F(s)]
Przykład: obliczanie obrazu F(s) funkcji f(t) z definicji
f
t =e
−2t
F
s=L[e
−2t
]=
∫
0
∞
e
−2t
⋅e
−st
dt
=
∫
0
∞
e
−2st
dt
=
1
−2s
e
−2st
∣
0
∞
F
s=L[e
−2t
]=−
1
−2s
=
0.5
1
0.5s
14
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
Przykład: obliczanie obrazu F(s) funkcji f(t) z wykorzystaniem tabeli
f
t =e
−2t
F
s=L[e
−2t
]=L[e
−t /0.5
]=
0.5
1
0.5s
z tabeli:
L
[a⋅f t]=a⋅F s
f
t =
1
T
e
−t /T
F
s=
1
1
sT
wykorzystując właściwość:
otrzymamy:
f
t =e
−t /T
F
s=
T
1
sT
ostatecznie:
15
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
Rozwiązywanie
równań
różniczkowych
z
wykorzystaniem
przekształcenia Laplace'a.
Przykład: Chcemy rozwiązać równanie
˙0=0
0=1
¨40cdot=0
Przekształcamy równanie w przestrzeń obrazów
L
[ ¨t]=s
2
s−0 s− ˙0=s
2
s−s
L
[40cdot t]=40cdot L[t]=40cdot s
s
2
s−s40cdot s=0
s=
s
s
2
40
t =L
−1
[s]=cos
40 t
16
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Rachunek operatorowy
Wykorzystanie transformaty Laplace'a umożliwia:
rozwiązywanie równań różniczkowych zwyczajnych o stałych
współczynnikach,
rozwiązywanie niektórych równań różniczkowych cząstkowych,
rozwiązywanie pewnych klas równań całkowych czy też
różniczkowo-całkowych,
badanie odpowiedzi impulsowej układu oraz badanie stabilności
układu.
17
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – opis „wejście-wyjście”
Liniowy system dynamiczny możemy opisać za pomocą
zwyczajnego równania różniczkowego o stałych współczynnikach
przy zerowych warunkach początkowych:
a
n
d
n
y
dt
n
a
n
−1
d
n
−1
y
dt
n
−1
a
0y
=b
m
d
m
u
dt
m
b
m
−1
d
m
−1
u
dt
m
−1
b
0u
gdzie:
n
m
Stosując zapis operatorowy otrzymamy:
a
n
s
n
a
n
−1
s
n
−1
a
0
Y s=b
m
s
m
b
m
−1
s
m
−1
b
0
U s
18
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
G
s=
Y
s
U
s
=
b
m
s
m
b
m
−1
s
m
−1
b
0
a
n
s
n
a
n
−1
s
n
−1
a
0
Transmitancja operatorowa G(s)
jest zdefiniowana jako
stosunek transformaty Laplace’a sygnału wyjściowego Y(s)
do transformaty Laplace’a sygnału wejściowego U(s), przy
założeniu, że wszystkie warunki początkowe są zerowe.
19
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
Własności transmitancji operatorowej:
transmitancja
jest
własnością
samego
systemu,
niezależnie od wielkości i natury sygnału wejściowego,
transmitancja przedstawia związki pomiędzy sygnałami
wyjściowym i wejściowym, nie dostarcza natomiast żadnej
informacji dotyczącej fizycznej struktury systemu,
transmitancje wielu fizycznie różnych systemów mogą być
identyczne
łatwość stosowania transmitancji do tworzenia modeli o
skomplikowanej strukturze
20
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
Właściwości transmitancji operatorowej:
jeśli transmitancja układu jest znana, to możemy określić
sygnał wyjściowy dla różnych sygnałów wejściowych,
raz
określona
transmitancja
daje
pełny
opis
charakterystyk dynamicznych układu, w odróżnieniu od
jego opisu fizycznego,
stosując podstawienie s=j
ω
otrzymujemy transmitancję
widmową, znajomość której pozwala na wyznaczanie
charakterystyk częstotliwościowych systemu.
21
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
Transmitancja operatorowa charakteryzuje odpowiedź
modelu na pewne standardowe sygnały wejściowe, np.
odpowiedź modelu na skok jednostkowy otrzymamy dzieląc
transmitancję przez operator s.
22
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
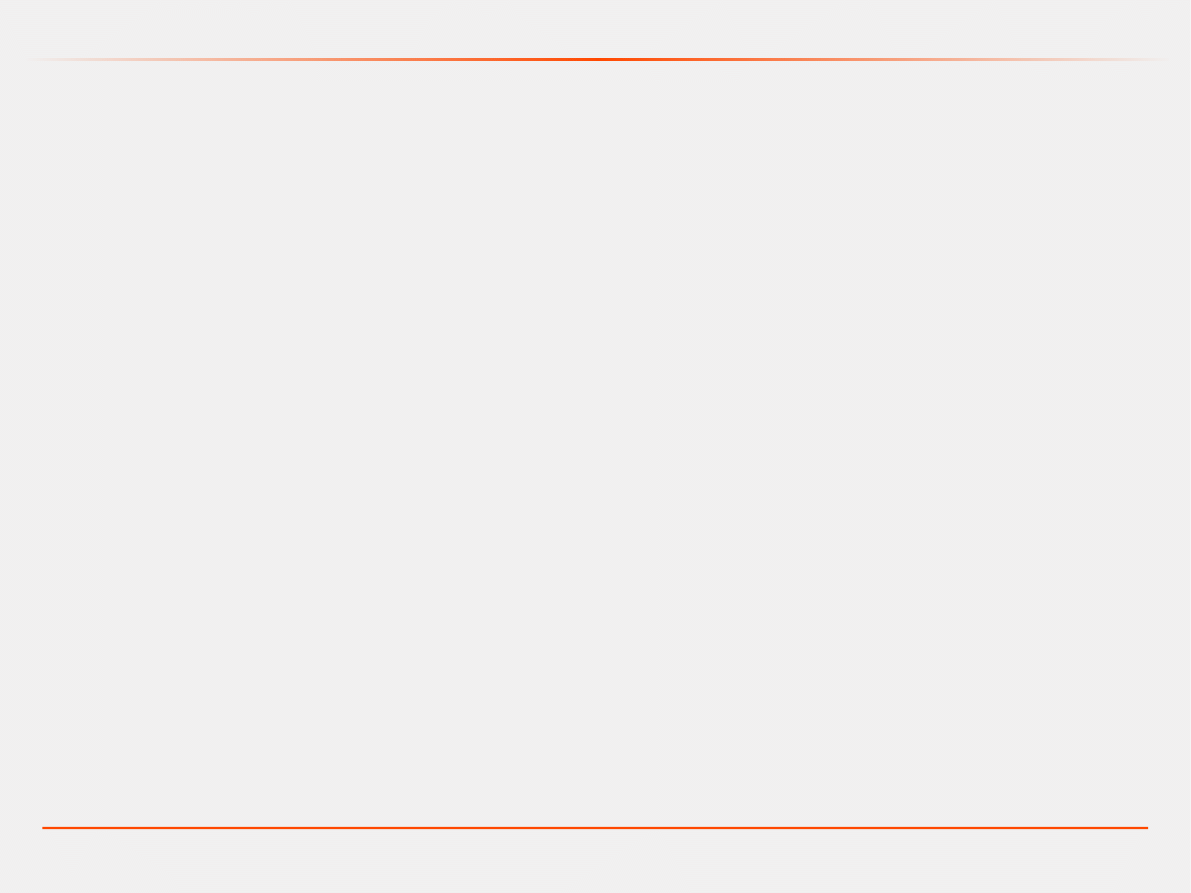
Transmitancje sprzężeń podstawowych.
sprzężenie szeregowe
G
1
(s)
G
2
(s)
G
s=G
1
s⋅G
2
s
Ze względu na nieprzemienność operacji mnożenia
operatorów kolejność połączenia szeregowego ma istotne
znaczenie!
23
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
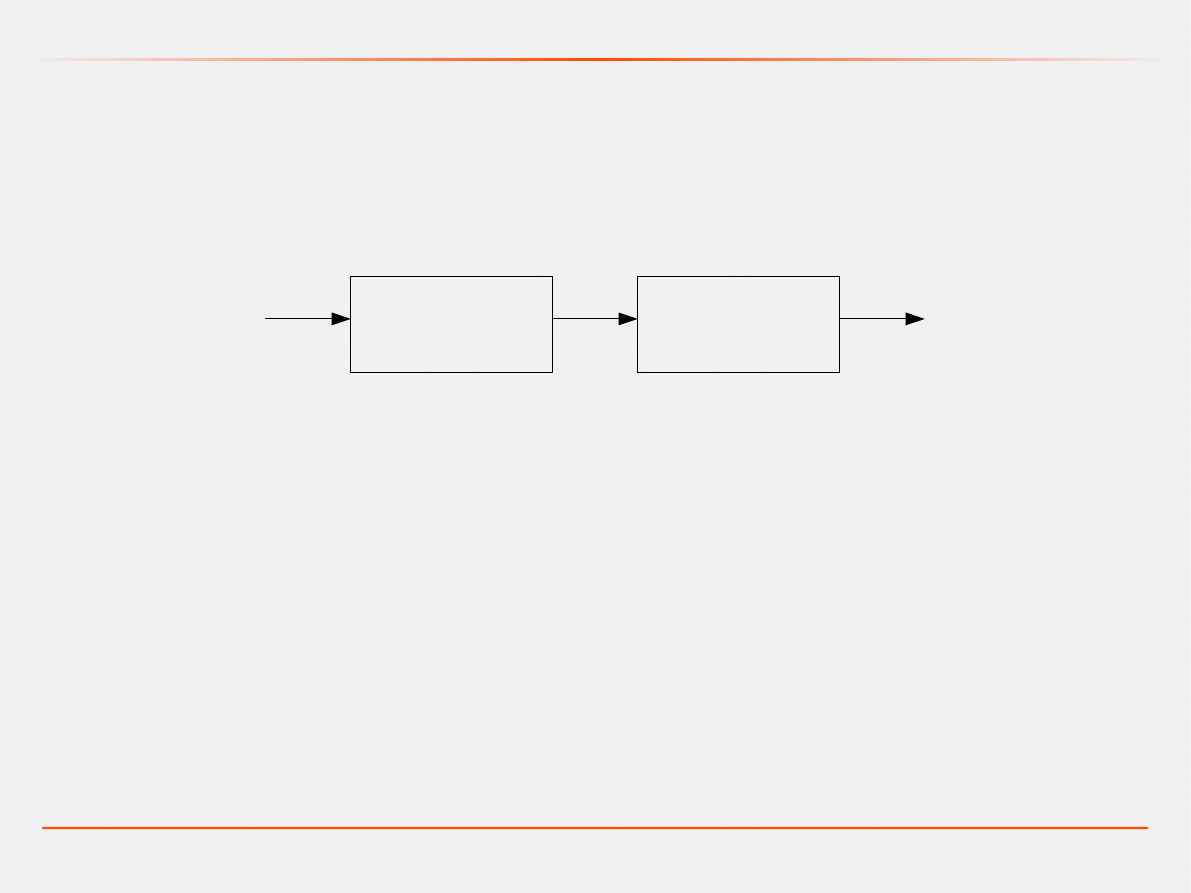
sprzężenie równoległe
G
1
(s)
G
2
(s)
+
+
G
s=G
1
sG
2
s
24
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa
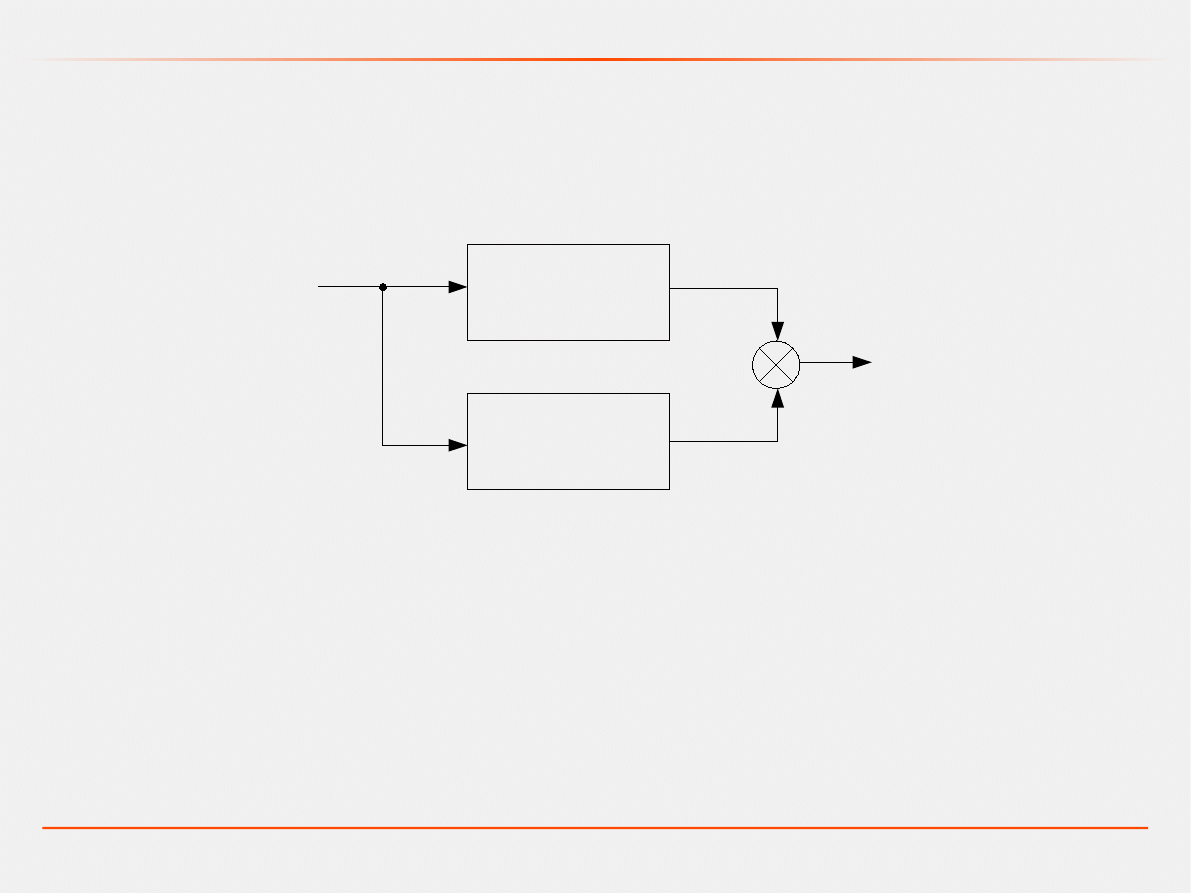
sprzężenia zwrotne
G
1
(s)
G
2
(s)
+
+
G
s=
G
1
s
1
−G
1
s⋅G
2
s
G
1
(s)
G
2
(s)
+
-
G
s=
G
1
s
1
G
1
s⋅G
2
s
25
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
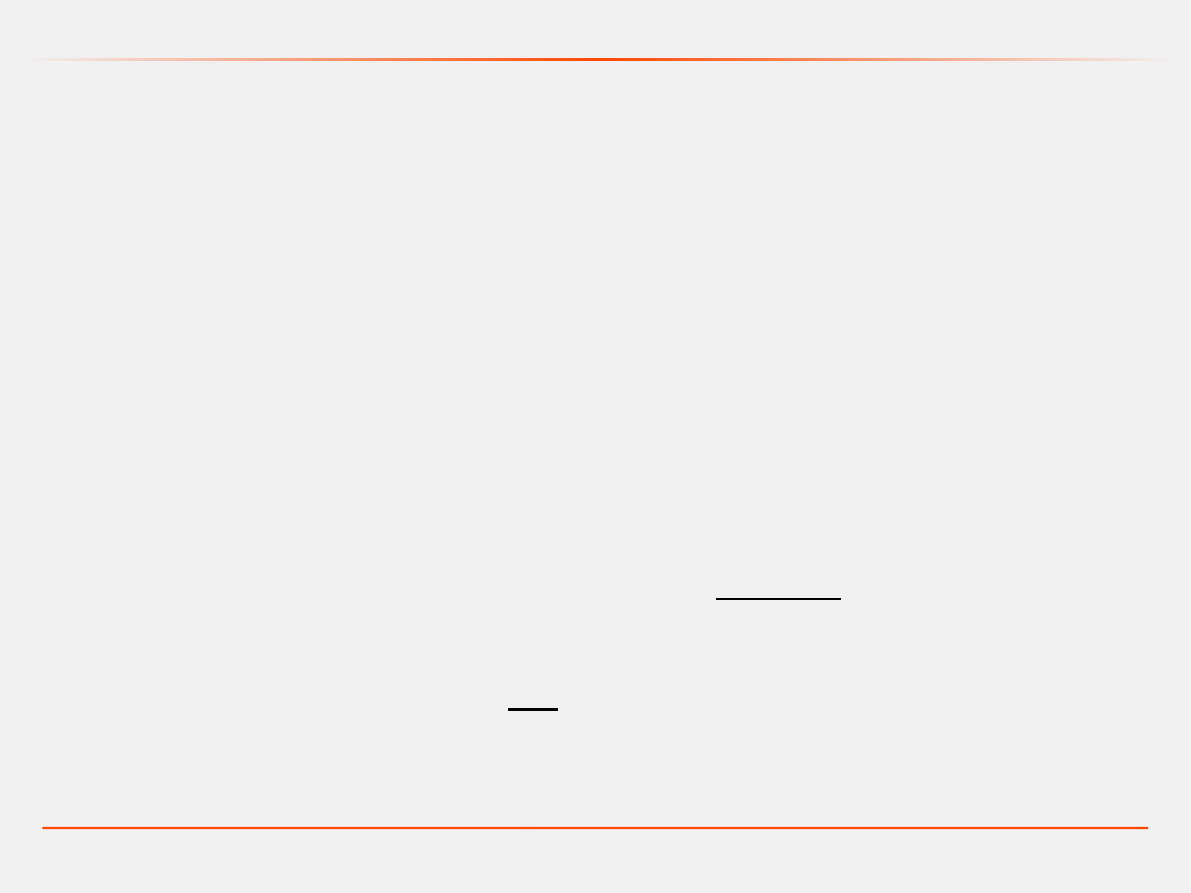
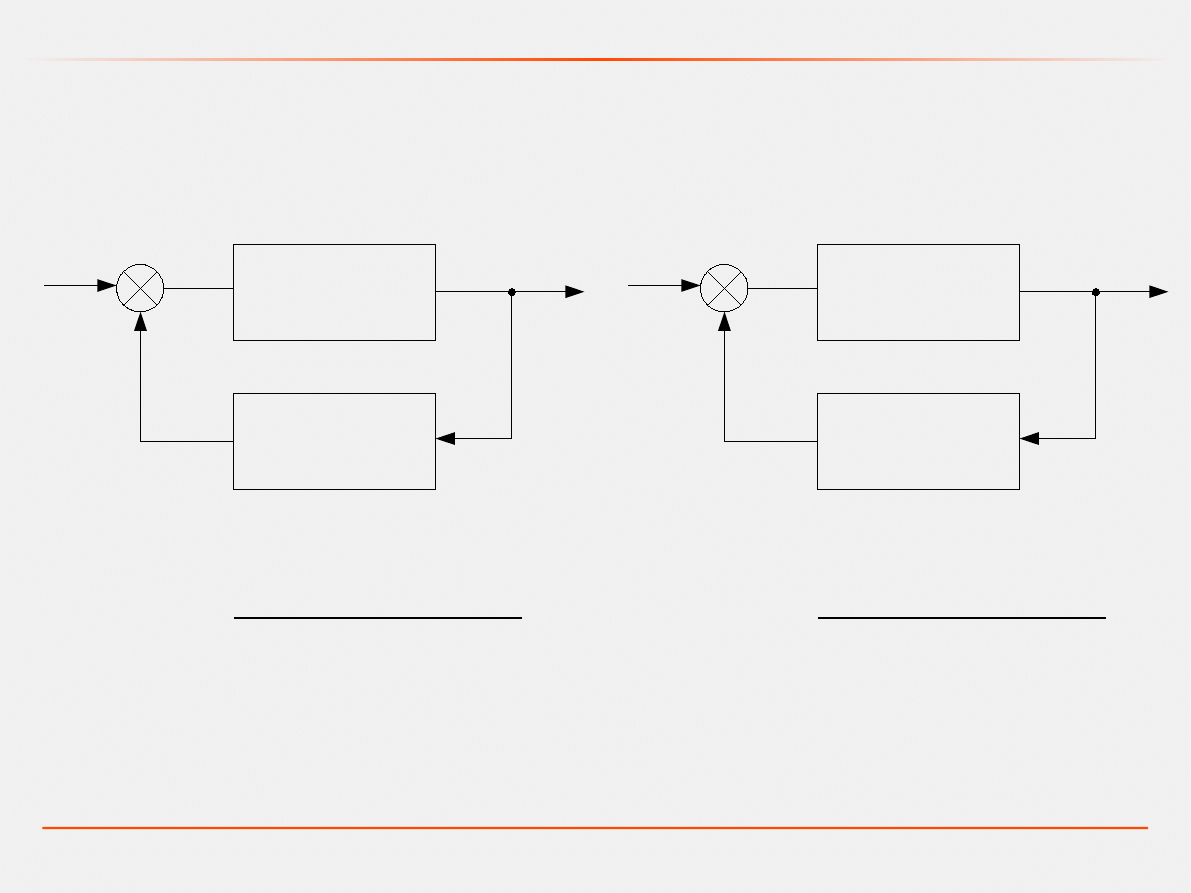
Model dynamiczny – transmitancja operatorowa
A jak to będzie dla przedstawionego układu?
G
1
(s)
+
G
2
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
+
+
-
26
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
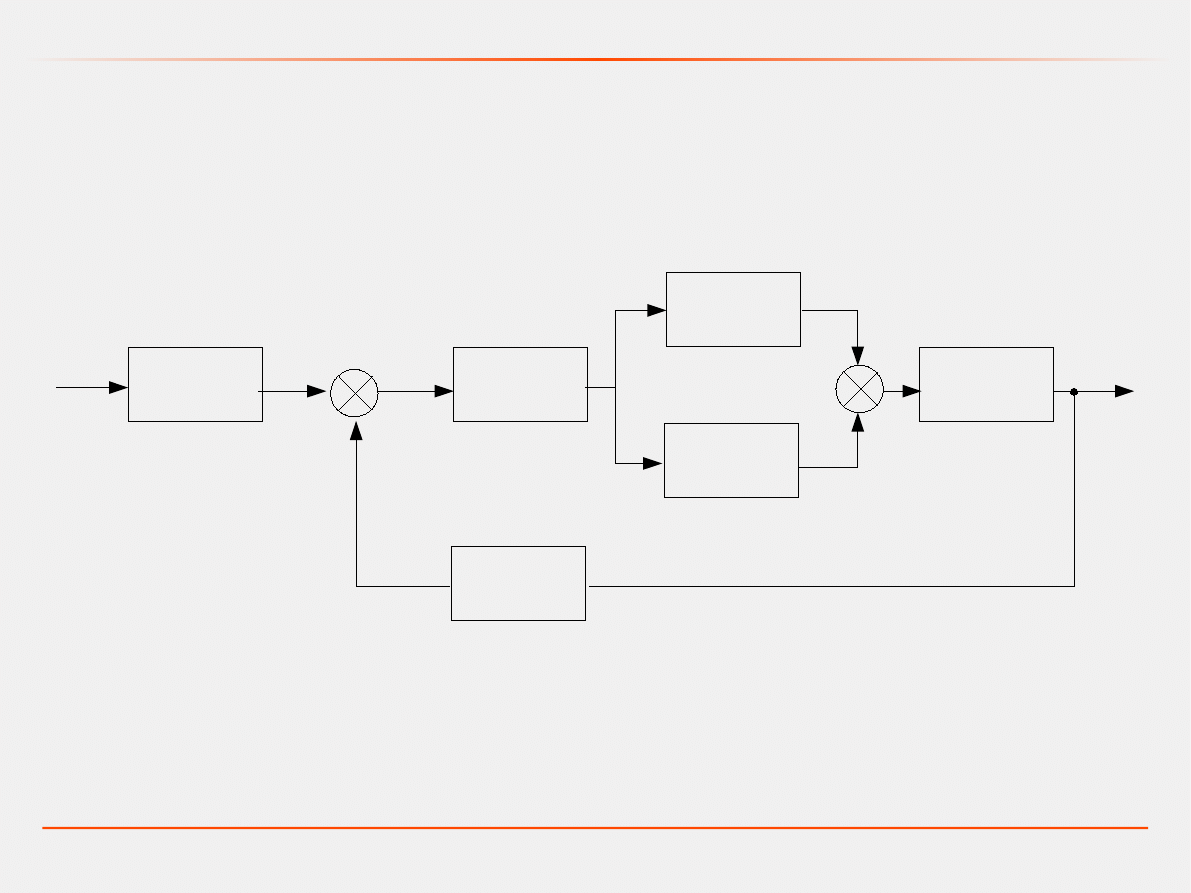
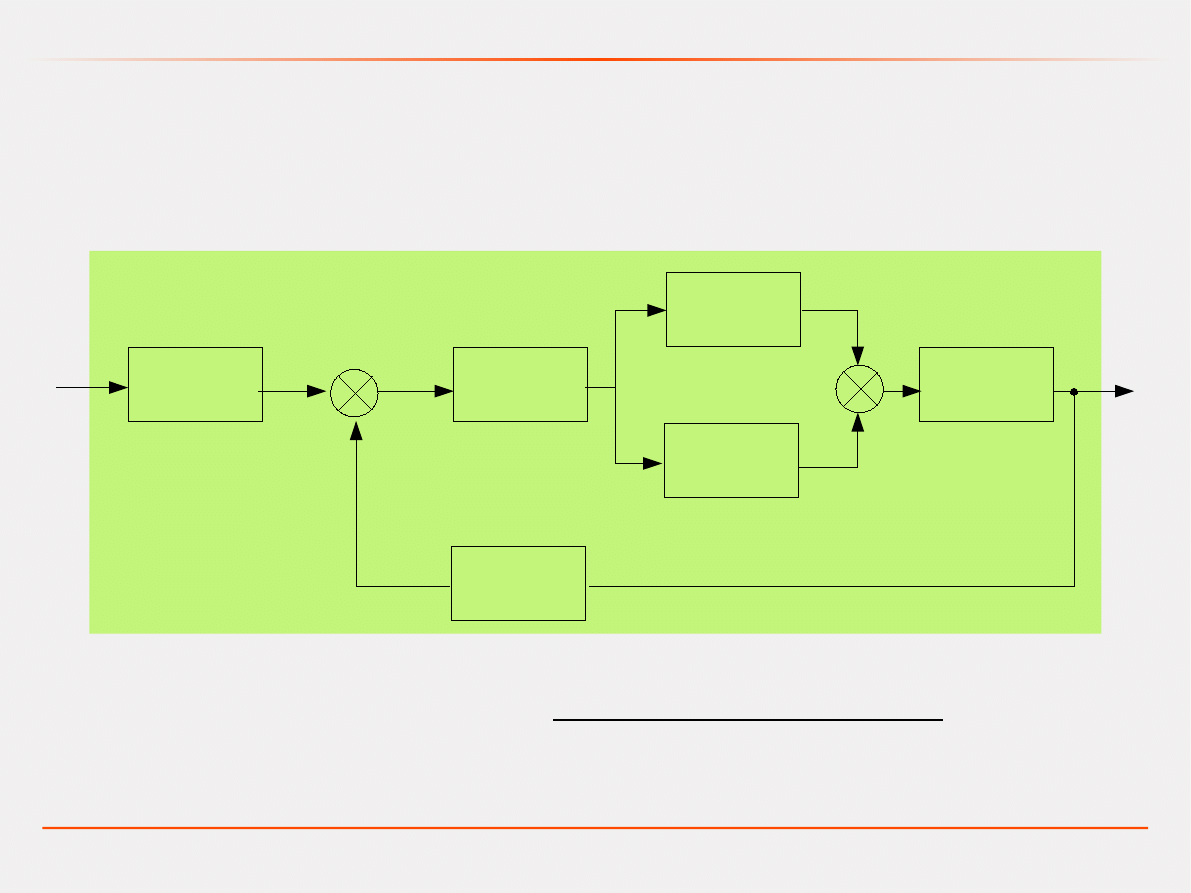
Model dynamiczny – transmitancja operatorowa
A jak to będzie dla przedstawionego układu?
G
1
(s)
+
G
2
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
+
+
-
G
34
=G
3
−G
4
27
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
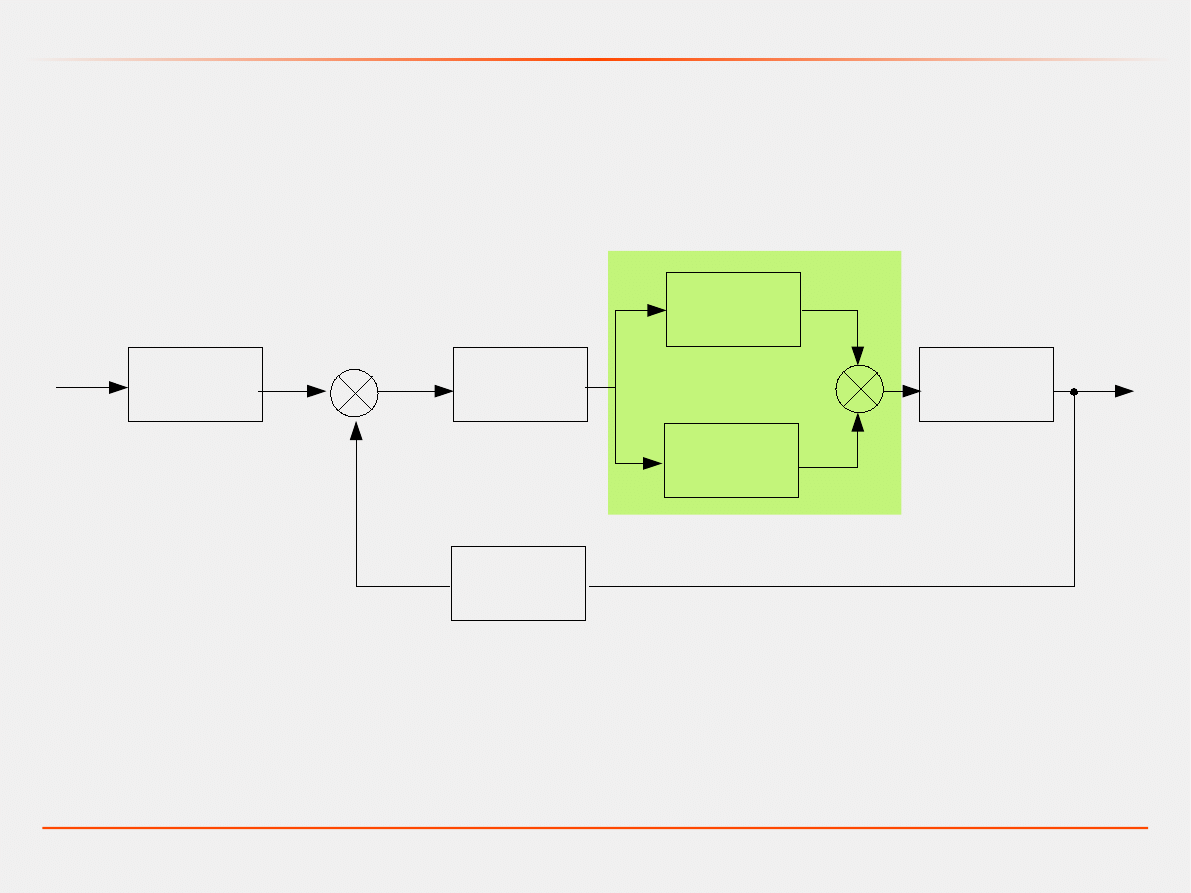
Model dynamiczny – transmitancja operatorowa
A jak to będzie dla przedstawionego układu?
G
1
(s)
+
G
2
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
+
+
-
G
25
=G
2
⋅G
3
−G
4
⋅G
5
28
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
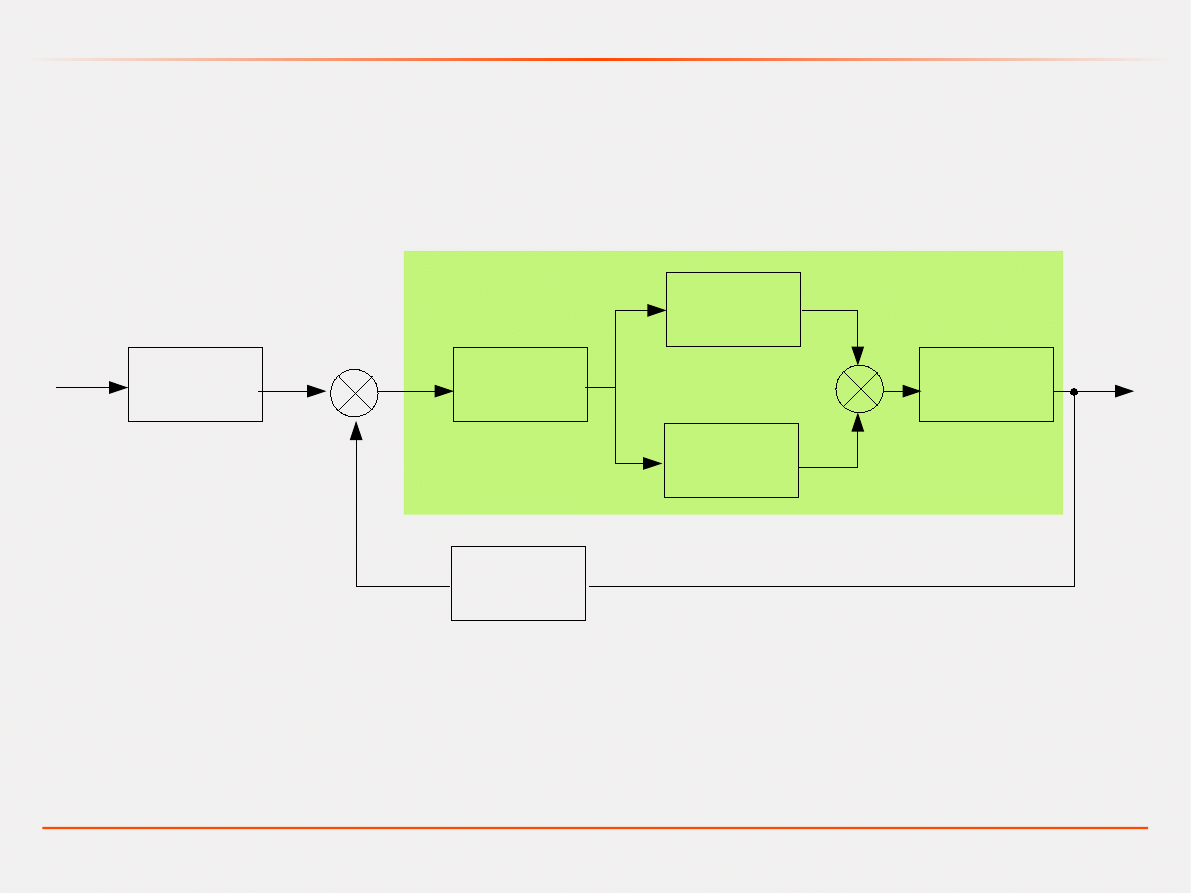
Model dynamiczny – transmitancja operatorowa
A jak to będzie dla przedstawionego układu?
G
1
(s)
+
G
2
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
+
+
-
G
26
=
G
2
G
3
−G
4
G
5
1
−G
6
G
2
G
5
G
3
−G
4
29
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
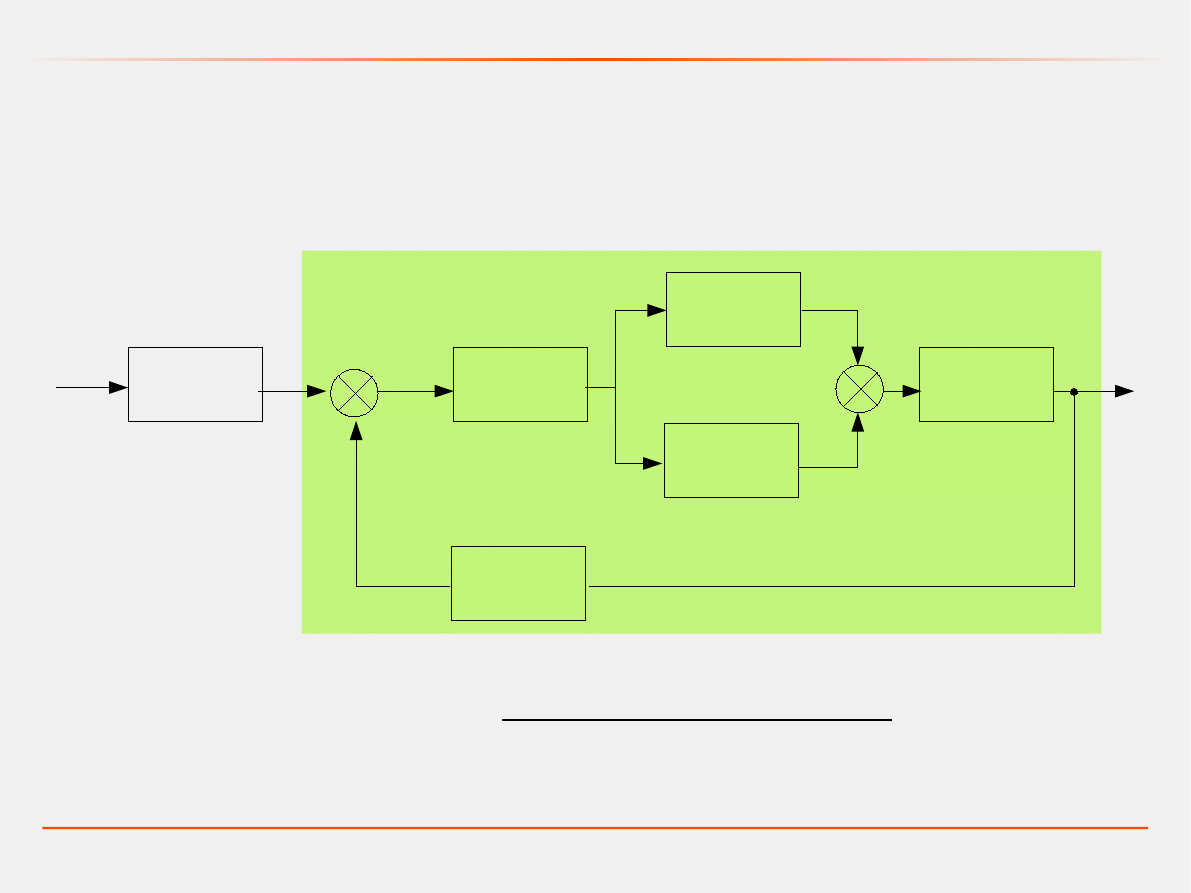
Model dynamiczny – transmitancja operatorowa
A jak to będzie dla przedstawionego układu?
G
1
(s)
+
G
2
(s)
G
3
(s)
G
4
(s)
G
5
(s)
G
6
(s)
+
+
-
G
=G
1
G
2
G
5
⋅
G
3
−G
4
1
−G
2
G
5
G
6
G
3
−G
4
Wyszukiwarka
Podobne podstrony:
MIS wyklad 7
MIS wyklad 6
MIS wyklad 1
MIS wyklad 2
MIS wyklad 9
MiS wykład5 6
MIS wyklad 8
MIS wyklad 3
MIS wyklad 4
MIS wyklad 7
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron